机器人位姿方程资料
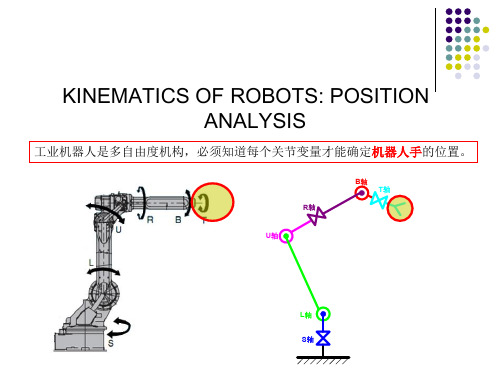
2、机器人的位姿描述与坐标变换
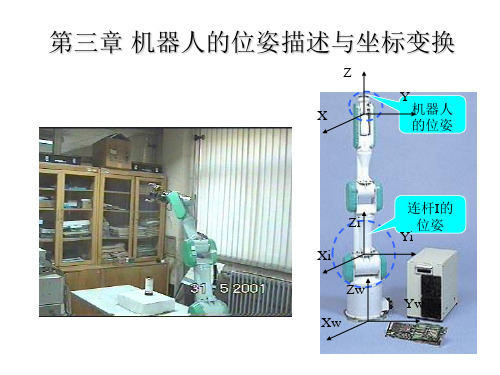
机器人学第二章机器人的位姿描述与坐标变换战强北京航空航天大学机器人研究所第二章 机器人的位姿描述与坐标变换 机器人的位姿连杆I 的位姿YX ZYi XiZi YwXwZw2-1、基本概念1) 自由度(Degree of Freedom, DOF):指一个点或一个物体运动的方式,或一个动态系统的变化方式。
每个自由度可表示一个独立的变量,而利用所有的自由度,就可完全规定所研究的一个物体或一个系统的位置和姿态。
也指描述物体运动所需的独立坐标数,3维空间需要6个自由度。
2) 操作臂(Manipulator):具有和人手臂(Arm)相似的功能、可在空间抓放物体或进行其它操作的机电装置。
----Arm3) 末端执行器(End-Effector):位于机器人腕部的末端,直接执行工作要求的装置。
如灵巧手、夹持器。
----Hand/Gripper4) 手腕(Wrist):位于执行器与手臂之间,具有支撑和调整末端执行器姿态功能的机构。
操作臂的组成部分之一。
5)手臂(Arm):位于基座和手腕之间,由操作手的动力关节和连杆等组成的组件。
能支撑手腕和末端执行器,并具有调整末端执行器位置的功能。
操作臂的组成部分。
Outdated!6) 世界坐标系(World Coordinate System):参照地球的直角坐标系。
7)机座坐标系、基坐标系(Base reference coordinate system):参照机器人基座的坐标系,即机器人末端位姿的参考坐标系。
8)坐标变换(Coordinate Transformation):将一个点的坐标描述从一个坐标系转换到另一个坐标系下描述的过程。
手腕机座手臂Yw XwZw9)位姿(Position&Pose):机器人末端执行器在指定坐标系中的位置和姿态。
10)工作空间(Working Space):机器人在执行任务时,其腕轴交点能在空间活动的范围。
由连杆尺寸和构形决定。
机器人的位姿描述与坐标变换
j i
R (a , ) R( Z , ) R( X , a )
Xi
Xm
Xj
cos sin j i R (a , ) 0
sin cos 0
0 1 0 0 cos a 0 1 0 sin a
0 cos sin sin a cos a 0
Yj
xi
Xi
yi
Yi
xj
Xj
xi x j cos(X i , X j ) y j cos(X i , Y j ) z j cos(X i , Z j ) i P yi x j cos(Yi , X j ) y j cos(Yi , Y j ) z j cos(Yi , Z j ) z x cos(Z , X ) y cos(Z , Y ) z cos(Z , Z ) j i j j i j j i j i
T
5 21 7
2、坐标旋转(坐标系原点相同)
Zj Zi P
坐标系j由坐标系i旋转而成 已知点P在j坐标系的坐标:
Yj
j
P [x j
yj
z j ]T
Yi Xi Xj
求点P在i坐标系的坐标:
i
P [ xi
yi
zi ]T
Zj
Zi
zi
P
yj
zj
Yj
xi
Xi
yi
Yi
xj
Xj
☺ 关于(Yi , X j )?
Z2 Z i (Z1 )
j f
R(Z i ,j )
j i
R(Y1 , )
R(Z 2 , f )
Zj
第3章 机器人位姿的数学描述与坐标变换

x=a(1-cos) , y=a(1-sinθ)
第3章 机器人位姿的数学描述与坐标变换
3.1 机器人位姿的数学描述
#假设机器人的连杆和关节都是刚体 (1)首先,建立一个参考坐标系; (2)然后,在刚体上任意建立一个刚体坐标系。
Z Z'
O' Y'
O
X'
X Y
第3章 机器人位姿的数学描述与坐标变换
刚体位置:
,
)
=
?
j i
R(,q
,
)
=
R(Z
,
)
R(Y
,q
)R(Z
,
)
绕动坐标轴依次转动时,每 个旋转矩阵要从左往右乘。
Z2
Zj
Zi (Z1)
q
q
Yj
(Y2 )
q Y1
Yi
Xi
X1 X2 X j
第3章 机器人位姿的数学描述与坐标变换
cos − sin 0 cosq 0 sinq cos − sin 0
R(Z
i
,q
)
=
s
inq
cosq
0
0
0 1
Zi Zj
q Xi
Xj
Yj q
Yi
第3章 机器人位姿的数学描述与坐标变换
1 0
0
j i
R(
X
i
,q
)
=
0
cosq
−
s in q
0 sinq cosq
cosq 0 sinq
j i
R(Yi
,q
)
=
0
1
0
− sinq 0 cosq
机器人运动学-1位姿表示,坐标变换 第五讲 数理基础共27页
(3)一般求法
若
nx ox ax px
T
n
y
oy
ay
p
y
nz 0
oz 0
az 0
pz 1
则
nx ny nz p n
T1 ox oy oz p o
a0x
ay 0
az 0
p a
1
p p x p y p z T , n n x n y n z T , o o x o y o z T , a a x a y a z T
二、坐标变换
1.平移坐标变换 坐标系{A}和{B}
具有相同的方位,但 原点不重合.则点P在 两个坐标系中的位置 矢量满足下式:
APBPAPB0
二、坐标变换
2.旋转变换 坐标系{A}和{B}
有相同的原点但方位 不同,则点P的在两个 坐标系中的位置矢量 有如下关系:
APB ARBP
BPBARAP B ARB AR1B ART
例4.1 已知坐标系{B}的初始位姿与{A}重合,首先{B}
相对于{A}的ZA轴转30°,再沿{A}的XA轴移动12单位, 并沿{A}的YA轴移动6单位。求位置矢量APB0和旋转矩阵 BAR。设点p在{B}坐标系中的位置为BP=[3,7,0],求它 在坐标系{A}中的位置。
0.8660.5 0
12
B ARR(z,30 0)0.5 0.8660;ApB06
二、坐标变换
P
3.复合变换
yB
yC
BP
xB
yA
AP
OB
xC
APBO zC
OA
xA
zB
zA
坐标系A和C之间是平移变换关系 APCPAPC0
3机器人的位姿描述与坐标变换
假设:
整理得:
旋转变换通式
讨论:
(1)
(2)
(3)
例:坐标系B原来与A重合,将坐标系B绕过原点O的轴线
转动
,求旋转矩阵
解答:
1)
2)
3)带入旋转通式得:
2、等效转轴与等效转角
转轴和转角
旋转矩阵
1
2?
1)将方程两边矩阵的主对角线元素分别相加,则
2)将方程两边矩阵的非对角线元素成对相减得:
►绕多个坐标轴旋转的转动矩阵
1)、绕固定坐标系旋转
2)、绕运动坐标系旋转
ZYZ欧拉角
注意:多个旋转矩阵连乘时,次序不同则含义不同。1)绕新的动坐标轴依次转动时,每个旋转矩阵要从左往右乘,即旋转矩阵的相乘顺序与转动次序相同;2)绕旧的固定坐标轴依次转动时,每个旋转矩阵要从右往左乘,即旋转矩阵的相乘顺序与转动次序相反。
解:
1)
2)
Z
i
X
i
Y
i
P
坐标系j由坐标系i旋转而成
求点P在i坐标系的坐标:
已知点P在j坐标系的坐标:
P
☺
►姿态矢量矩阵
坐标系j相对于i的方位
旋转矩阵的性质:
旋转矩阵
►绕一个坐标轴旋转的转动矩阵
1)RX
2)RY
3)RZ
转动矩阵的特点:(1) 主对角线上有一个元素为1,其余均为转角的余弦/正弦;(2) 绕轴转动的次序与元素1所在的行、列号对应;(3) 元素1所在的行、列,其它元素均为0;(4) 从元素1所在行起,自上而下,先出现的正弦为负,后出现的为正,反之依然。
2、变换矩阵T的相乘 ★矩阵相乘的顺序一般不可换,特殊可换的情况为变换都是同参考系下的平移或绕同一坐标轴的旋转。
第2章机器人位姿方程
1 2 0 1 1
1
0 2 2 3 4 5 T T T T T T 6 6 3 3 4 4 5 5 6 6
求出2
T T T
2 3 1 3 1 2 1 2 0 1 1
1
0 3 3 4 T54 5 T65 6 T6 T6 T4
求出3
技巧1:将待求量以到方程左边,使左边只有待求量, 而右边矩阵有对应的常数项,递推求解:
T T T T
3 4 1 4 2 3 1 3 1 2 1 2 0 1 1
1
0 4 4 5 T65 6 T6 T6 T5
技巧1的应用:
T ②
1 6 3 6 4 6
① 1
3
T ④ T ⑥
5 6
③ 2
4
求解顺序: ① 1 、 ② 3 、 ③ 2 ④ 4 、 ⑤ 5 、 ⑥ 6
a3 0 -90
3(-90)
0 0 1 0 0 0 0 1
0 d4 90
4
0 0 -90
5
所以
c 1 s T10 1 0 0
T
i 1 i
c i c s i 1 i s i 1s i 0
0 1
机器人运动学-1位姿表示,坐标变换 第五讲 数理基础共27页
0
0
0
3
0 0 1 7 1 0 0 0 0 0 1 0 2
0 0 0
1
0
0 0 1 0
而齐次变换公式和变换矩阵变为:
APA BTBP, A BTB A0 R AP 1B0
三、齐次坐标变换
2.平移齐次坐标变换
{A}分别沿{B}的X、Y、Z坐标轴平移a、b、c距 离的平移齐次变换矩阵写为:
1 0 0 a Trans(a,b,c) 0 1 0 b
0 0 1 c 0 0 0 1
用非零常数乘以变换矩阵的每个元素,不改变特性。
3.位姿描述
• 刚体位姿(即位置和姿 态),用刚体的方位参考
坐标的原点位置矢量和
旋转矩阵表示,即
B B A RA p B 03 4
•
表示位置时,A B
R
• 表示姿态时,ApB0=0
一、位置和姿态的表示
4.机器人手爪坐标系
T noaP
n:法向矢量 (normal)
o:方向矢量
(orientation) a:接近矢量 (approach) P:位置矢量 (position)
0 1 0 07 3
R(z,90) 1
0
0
0.3=
7
0 0 1 02 2
0
0
0
11
1
0 0 1 03 2
R(y,90)
0
1 0 0. 7 =7
1 0 0 0 2 3
0
0
0
1
1
1
例4-4:在上述基础上再平移(4,-3,7)。
1 0 0 42 6 Tra(n4,s3,7)0 1 0 3.7=4
因此旋转矩阵是单位正交矩阵,具有如下特性: B AR1B ART B AR1
机器人的位姿运动学
PAB (Bx Ax )i ( By Ay ) j ( Bz Az )k
ax P b y cz
x
P
cz by ax
y
【空间向量的表示】
Application of a scale factor
Makes the matrix 4 by 1 Allows for introducing directional vectors
S 1 0 0 C 0
Representation of Combined Transformations
【复合变换的表示】
1. 2.
Example:
Rotation of degrees about the x-axis, Followed by a translation of [l1,l2,l3] (relative to the x-, y-, and z-axes respectively), Followed by a rotation of degrees about the y-axis.
nx n F y nz 0
ox oy oz 0
ax ay az 0
px py pz 1
【齐次变换矩阵】
3. 变换的表示 Representation of Transformations
当空间的坐标系(向量、物体或运动坐标系)相对于固定的参考坐 标系运动时,这一运动可以用类似于表示坐标系的方式来表示。
z
Axis
px pn p y l1 l2 po cos pa sin pz l3 l4 po sin pa cos
第二章位姿描述和齐次变换资料
x1
r12 r22 r32 r13 r23 r33
y1
A B
R [ A xB
A
yB
r11 r A z B ];或A R B 21 r31
x
A A A 因为单位主矢量 x B、 yB、 zB两两垂直 旋转矩阵A B R是正交矩阵。
cos 0 sin R ( y , ) 0 1 0 sin 0 cos
三、位姿的描述(固接坐标系)
为了完全描述刚体B在空间的位姿(位置和姿态),通常将物体B与某 一坐标系{B}相固接。相对参考系{A},有位置矢量A PB0和旋转矩阵 BA R 分别
7
p}。
2.2、坐标}与{A}具有相同的方位,但是{B}的坐标原点与{A} A 的不重合,用位置矢量 PB0 描述它相对于{A}的位置。如图所 A 示,把 PB0称为{B}相对于{A}的平移矢量,若点p在坐标系{B} 中的位置为 B P ,则它相对于坐标系{A}的位置矢量为 AP
0
yB
B z A 系(坐标旋转方程)为: p、 p 在两坐标系中的变换关 A A B p B R p
性质得
A B
B R和 A R 都是正交矩阵,两者互逆。根据正交矩阵的
B A
A A T R B R 1 B R
9
2.2、坐标变换(续) 三、一般变换
zB
p
z
* B
zA
yB
p* y* B
0
xB
6
2.1、刚体位姿描述(续)
四、手爪坐标系
机器人手部的位置和姿态也可以用固连于手部的坐标系{B} 的位姿来表示,如图2-6所示。 坐标系{B}可以这样来确定:取
机器人位姿几何基础
z0
z0 A
“A”表示被描述 系的编号 x0
O0
x0 A
pA
y
0 A
A y0
2、单位向量方向的矩阵描述
设当前向量iA是单位向量,与参考系轴x0的单位向量i0的夹角为α; 与轴y0的单位向量j0的夹角为β ;与轴z0的单位向量k0的夹角为γ : 表示轴iA与轴 i0 的夹角 z0
cos
O0 cos i A i0 cos cos i j = cos cos A 0 cos cos i k A 0 x0
是齐次矩阵
(1)齐次矩阵的相关术语:
1)齐次坐标 齐次坐标
●用4个数表示空间点的坐标:A(x1 x2 x3 x4 ) ●齐次坐标的几何含义:
X4为比例因子, 在《机器人学》 里取1。
━ x4≠0时表示唯一点,点的坐标分别为 x=x1/x4 y=x2/x4 z=x3/x4
━ x4=0时表示从坐标原点到点(x y z)的方向; x=x1 y=x2 z=x3
齐次矩阵
x2 x3 x4
T
3)齐次变换
点在坐标系Sj的齐次矩阵表示
i x1 n x i x2 n y i x 3 nz i x4 0
ox oy oz 0
ax ay az 0
p x x1j j p y x2 pz x 3j j 1 x4
0 10 0 0 1 0 0 1
从坐标系运动的角度叙述:
T10表示S1先与S0完全重合,再绕x0旋转90°再沿x0移动20
z0 z1 z0 y1 y1 O0 y0 O1 z1 O1 x1 z0 y0
2、机器人的位姿描述与坐标变换
机器人学第二章机器人的位姿描述与坐标变换战强北京航空航天大学机器人研究所第二章 机器人的位姿描述与坐标变换 机器人的位姿连杆I 的位姿YX ZYi XiZi YwXwZw2-1、基本概念1) 自由度(Degree of Freedom, DOF):指一个点或一个物体运动的方式,或一个动态系统的变化方式。
每个自由度可表示一个独立的变量,而利用所有的自由度,就可完全规定所研究的一个物体或一个系统的位置和姿态。
也指描述物体运动所需的独立坐标数,3维空间需要6个自由度。
2) 操作臂(Manipulator):具有和人手臂(Arm)相似的功能、可在空间抓放物体或进行其它操作的机电装置。
----Arm3) 末端执行器(End-Effector):位于机器人腕部的末端,直接执行工作要求的装置。
如灵巧手、夹持器。
----Hand/Gripper4) 手腕(Wrist):位于执行器与手臂之间,具有支撑和调整末端执行器姿态功能的机构。
操作臂的组成部分之一。
5)手臂(Arm):位于基座和手腕之间,由操作手的动力关节和连杆等组成的组件。
能支撑手腕和末端执行器,并具有调整末端执行器位置的功能。
操作臂的组成部分。
Outdated!6) 世界坐标系(World Coordinate System):参照地球的直角坐标系。
7)机座坐标系、基坐标系(Base reference coordinate system):参照机器人基座的坐标系,即机器人末端位姿的参考坐标系。
8)坐标变换(Coordinate Transformation):将一个点的坐标描述从一个坐标系转换到另一个坐标系下描述的过程。
手腕机座手臂Yw XwZw9)位姿(Position&Pose):机器人末端执行器在指定坐标系中的位置和姿态。
10)工作空间(Working Space):机器人在执行任务时,其腕轴交点能在空间活动的范围。
由连杆尺寸和构形决定。
第1章位姿几何基础资料
例2 图示手部抓握物体Q,物体为边长2个单位的正立方体,写 出表达该手部位姿的矩阵式。
解 物体Q形心与手部坐标系的坐标原点O 相重合,
手部位置列阵为: P = [1 1 1 1]T
动系X 轴的单位方向矢量 n:
动系Y 轴的方向矢量 o: 动系Z 轴的方向矢量 a:
手部位姿矩阵为:
刚体的运动可分解为旋转和平移,旋转和平移的 描述可以用O系和O 系的齐次坐标变换矩阵来表 达,这是研究机器人运动姿态的基础。
k
X
kY
vers
kY s
kY kZ vers kX s
kZ kZ vers c
0
0
0
0
1
式中:vers 1 cos
k
2 X
kY2
kZ2
1
上式为一般旋转齐次变换通式,它概括了绕X轴、Y轴及Z 轴进行旋转齐次变换的各种特殊情况 。
不仅适用于点的旋转变换,而且也适用于矢量、坐标系、 物体等的旋转变换计算。
G2 Rot(Z ,90)G1
0 1 0 0 0 1 0 2 1 0 0 6
1
0
0
0
1
0
0
6
0
1
0
2
0 0 1 0 0 0 1 2 0 0 1 2
0 0 0 1 0 0
0
1
0
0
0
1
手部绕手腕轴旋转是相对动坐标系作旋转变换,所以
G3 G1Rot(Z ,90)
0 1 0 2 0 1 0 0 1 0 0 2
nx T ny
n0z
ox x oy y oz z
00
px
py pz 1
R|P
2、机器人的位姿描述与坐标变换0912

25) 触觉(Tactile Sense):机器人与 物体之间接触时所得到的感觉信息。
26) 压觉(Sense of Contact Force): 机器人与物体某个表面接触时,沿 法线方向受到的力的信息感觉。
位精度较差
并联机器人
优点:系统的刚度大、定位 精度高 缺点:工作空间小、运动速 度低
串联机器人的种类: A、直角坐标型机器人
P F(X,Y,Z) B、 圆柱坐标机器人
R
z P F(, Z, R)
Y
Z
X
R
z
C、 球坐标机器人
P F(,, R) D、SCARA机器人
P F(,, )
18) 协调控制(Coordinated Control): 协调多个手臂或多台机器人同时进行 某种作业的控制。
19) 伺服系统(Servo System):控制机 器人的位姿和速度等,使其跟随目标 值变化的控制系统。
20) 离线编程(Off-line Programming):机器人作业方式的信息 记忆过程与作业对象不发生直接关系的编程方式。
iP [xi yi zi ]T
Zj
Zi
zi zj
P
yj Yj
xi xj
Xi
yi
Yi
Xj
☺ 关于(Yi , X j )?
yi xj cos(Yi , X j ) yi xj cos(Yi , X j ) y j cos(Yi ,Yj )
yi x j cos(Yi , X j ) y j cos(Yi ,Yj ) z j cos(Yi , Z j )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轴i
杆i Zi
轴 i+1 Zi+1
Zi-1
杆 i- 1
i-1
Oi Xi
i
Oi-1 Xi-1
i
di
D-H参数小结:
连杆的尺寸参数 连杆长度ai:Zi和Zi-1沿Xi的距离,总为正(可以为零); 连杆扭角αi :绕Xi ,Zi-1转至Zi的转角,符号根据右手 定则确定;(代数量)
相邻连杆的关系参数
T6 A1 A2 A3 A4 A5 A6
连杆坐标系的D-H变换
i-1坐标系经过下面四次有序的变换可得到i坐标系: (1)绕Zi-1轴转θi ;Rot(Zi-1,θi) i (2)沿Zi-1轴移动di ;Trans(Zi-1,di) (3)沿Xi轴移动ai ;Trans(Xi,ai) (4)绕Xi轴转αi ;Rot(Xi,αi)
连杆偏置di : Xi-1沿Zi-1至Xi的距离,沿Zi-1正向时为正; 关节转角θi :Xi-1绕Zi-1转至Xi的转角,符号根据右手定 则确定。
D-H参数确定了连杆i相对于连杆i-1的位姿
说明:
(1)基系:基座坐标系0系是固定不动的。Z0轴取关节1的 轴线,O0的设置任意,也可与O1重合。 (2)末杆(工具)n:由于末杆只有一个关节,约定n坐标 系与n-1坐标系平行。 手腕坐标系:参照前述 (3)当关节i轴线和关节i+1轴线相交时: 坐标原点Oi取关节i轴线和关节i+1轴线交点,x轴的方 向为zn-1与zn构成的面的法线。 (4)当关节i轴线和关节i+1轴线平行时: 坐标原点可取为关节i+1轴线与关节i+2轴线的公垂线 与关节i+1轴线的交点。
2.1 杆件坐标系建立
一、坐标系、连杆、关节编号
按从机座到末端执行器的顺序,由低到高依次为各关节和 各连杆编号。 机座编号为杆件0,与机座相连连杆编号为杆件1,……。 机座与连杆1的关节编号为关节1,连杆1与连杆2的连接关 节编号为2,依此类推。 与基座(连杆o)固接的 称为基坐标系,与连 杆1固接的称为坐标系 1,与连杆i固接的坐 标系称为坐标系i。
x3
200 800
z4h x4h
z0 x0
0
(3)求两杆之间的位姿矩阵 Ai矩阵
A (0,0,800)Trans(400 ,0,0) 1 Rot( z, 1 )Trans
c1 s1 s c1 1 0 0 0 0 0 0 1 0 0 0 1 800 0 0 1 0 0 1 0 0 0 400 0 0 1 0 0 1
二、坐标系方位的确定
两种方法确定坐标系的方位
1.一般方法 对坐标系的各坐标轴的分配并无特殊规定,后一坐标系 (序号大的坐标系)向前一坐标系的坐标变换按照坐标变 换进行。 2.D-H方法 1956年由Denauit和Hartenbery提出,定义了坐标系和4 个描述连杆几何参数和和相对位置参数。
1.连杆的几何参数
z5
O5
A6
z6
x6
y6
A5
⑤
A4 z3
⑥
z4
O6
d6
④
O3
A3
x3
A1
③
z
1
d3 x2
x4
O4
z2
A2
x5
o3 , o4 , o5重合 d4 d5 0
O2
2
O1
②d
x1
① Ⅰ
z0 y0 O0 d1 x0
Ai Rot( z,i )Trans(0,0, di )Trans(ai ,0,0) Rot( x,i )
2.2 连杆坐标系的变换矩阵
A矩阵:描述相邻两连杆齐次变换矩阵。A矩阵将上(小) 编号连杆坐标系向下(大)编号连杆坐标系变换。 A1描述第一个连杆对于机身的位姿,A2描述第二个连杆 坐标系相对于第一个连杆坐标系的位姿。
A1 A2描述第二个连杆坐标系相对于机身的位姿。
T矩阵:连续变换的若干A矩阵的积称为T矩阵。 对于一个六连杆(六自由度)机械手,末端执行器相对 于机身坐标系的齐次变换矩阵为
描述相邻连杆的相对位置 关节转角θi:垂直于关节轴线的平面内,两个共垂线之 间的夹角 连杆偏置di:沿关节i轴线方向,两共垂线之间的距离。
关节变量 旋转关节:关节转角 θi。 移动关节:连杆偏置di 是关节变量,θi =0。
D-H参数
为了便于矩阵计算,将每个连杆和关节的 参数值填入D-H参数表。
3.D-H坐标系建立
qi
=[30°,-60°,-120,90°]T
400
300
时,机器人手部的位置和姿态。
SCARA机器人主要用于 装配、焊接、密封、搬运 和拿放等场合,具有高刚 性、高精度、高速度、安 装空间小优点。
800
200
解: 1.运动学方程 (1)建立D--H坐标系 机座坐标系{0} 杆件坐标系{i} 手部坐标系{h}
A6
z6
x6
y6
A5
⑤
A4 z3
⑥
z4
O6
d6
④
O3
A3
x3
A1
③
z
1
d3 x2
z5
O5
x4
O4
z2
A2
x5
o3 , o4 , o5重合 d4 d5 0
O2
2
O1
②d
x1
① Ⅰ
z0 y0 O0 d1 x0
例2:已知四轴平面关节SCARA机器 人如图所示,试计算: (1)机器人的运动学方程; (2)当关节变量取
z5 ⑤ z4 z6
⑥Ⅵ
o3 ② Ⅲ o0 o1 x0 x1 ① Ⅰ
PUMA 560机器人结构简图
z1
z0 o2
a2 z2 Ⅱ x3 x2 z3
③ aⅣ ④
3
x6 x5 x4
o4 Ⅴo5 o6
z5 ⑤ z4 z6
⑥Ⅵ
o3 ② Ⅲ o0 o1 x0 x1 ① Ⅰ
连 杆 变 量
1 2 3 4
1 2 3 4 5 6
400 z1 x1 300 z2 x2
z3 x3 z4h
c1 s1 s c1 1 0 0 0 0
0 400c1 0 400s1 1 800 0 1
200
800
x4h
z0 x0
ci si Ai 0 0
sici
0 1
400
z1
300 x1
z2 x2
s4 0 0 c4 0 0 0 1 200 0 0 1
200 800
z3 x3 z4h x4h
z0 x0
2.机器人运动学方程
c124 s T4 A1 A2 A3 A4 124 0 0 s124 c124 0 0 0 400c1 300c12 0 400s1 300s12 1 600 d 3 0 1
800
0
400
1
z1
300
x1
z2
3 z3
x2
x3 x4h
2
200
z4h
z0
x0
(2)确定D-H参数表
400 z1 300 x1 z2 x2 z3
连 杆 1 1 2 2 3 3 4 4
变 量 变 量 θ1
θ2 d3 θ4
α 400 300
a 0 0
0 0
0 0
d 800 0 d3 -200
1 2
3
d4
α
–90 ° 0° –90 ° –90 ° 90° 0°
a
0 a2 a3 0 0 0
d
0 d2 0 d4 0 0
cosα
1 0 1 0 0 0
sinα
Ⅲ
x5
o3 , o4 , o5重合 d4 d5 0
ⅡO1
②
x1
①
d2
Ⅰ
d1 x0
z0 y0
O0
2) 确定各连杆的D-H参数和关节变量
3) 求两杆之间的位姿矩阵Ai
ci sici sisi aici s c c c s a s i i i i i i Ai i 0 si ci di 0 0 0 1
400 300 1
z1
z2 x2
z3 x3 z4h 200 800 x4h
z0
x0
ci s Ai i 0 0
c4 s A4 4 0 0
sici
cici si
0
sisi aici cisi aisi ci di
连杆i: 连杆长度ai:两关节转轴i和i+1之间的最短距离,即两 轴线之间公垂线的长度; 连杆扭角αi :两个关节轴线i和i+1的夹角; 注意: 当两轴线相交于一点时,ai=0。 机座及末端连杆只有一个关节,规定长度为0。 一端为旋转关节,另一端为移动关节的连杆,长度 规定为0。
2.关节变量及偏置量
0 1
400 z1 300 x1 z2 x2
s2 0 300c2 c2 0 300s2 0 1 0 0 0 1
200 800
z3 x3 z4h x4h
z0 x0
A3 Trans(0,0, d 3 ) 1 0 0 0 0 1 0 0 0 0 1 0 0 0 d3 1
式中:
c124 cos(1 2 4 ) s124 sin(1 2 4 ) c12 cos(1 2 ) s12 sin(1 2 )
当qi=[30°,-60°,-120,90°]T,
机器人手部的位置和姿态: