2、机器人的位姿描述与坐标变换.
机器人的位姿描述与坐标变换

0
1
0
⎥ ⎥
⎢⎣− sinθ 0 cosθ ⎥⎦
Zi Zj
θ
θ Xi
Xj
Yi Y j
⎡cosθ − sinθ 0⎤
j i
R(Zi
,θ
)
=
⎢⎢sinθ
cosθ
0⎥⎥
⎢⎣ 0
0 1⎥⎦
Zi Zj
θ
Xi Xj
Yj
θ
Yi
⎡1 0
0⎤
j i
R(
X
i
,θ
)
=
⎢⎢0
cosθ
−
sinθ
⎥ ⎥
⎢⎣0 sinθ cosθ ⎥⎦
¥ ¥假设机器人的连杆和关节都是刚体¥ ¥
位置矢量
⎡x0 ⎤
P o '
o
=
⎢ ⎢
y0
⎥ ⎥
⎢⎣ z0 ⎥⎦
Z b Z'
O' Y' t n X' O
X Y
姿态矢量
O' O
R
=
[
O' O
X
OO'Y
⎡cos(∠X ' X )
O' O
Z
]3×3
=
⎢ ⎢
cos(∠X
'Y
)
⎢⎣cos(∠X ' Z )
单位主矢量
cos(∠Y ' X ) cos(∠Y 'Y ) cos(∠Z ' Z )
cos(∠Z ' X )⎤
cos(∠Z
'Y
)
⎥ ⎥
cos(∠Z ' Z ) ⎥⎦
姿态矩阵R的特点:
机器人学技术基础课程-位姿描述和齐次变换

位姿描述与齐次变换
1 刚体位姿的描述 2 坐标变换 3 齐次坐标系和齐次变换 4 齐次变换矩阵的运算 5 变换方程
2.1 刚体位姿的描述
为了完全描述一个刚体在空间的位姿,通常将刚体与某 一坐标系固连,坐标系的原点一般选在刚体的特征点上,如 质心、对称中心等。
YˆB ZˆA
ZˆB Xˆ A ZˆB YˆA
ZˆB ZˆA
XB n
2.1.4 旋转矩阵的意义
若坐标系B可由坐标系A,通过绕A的某一坐标轴获得,则绕 x,y,z三轴的旋转矩阵分别为:
1 0 0
c 0 s
c s 0
R(x, ) 0
Ay
y
所以: A Axaˆx Ayaˆy Azaˆz
2.1.2 方位的描述
矢量: A Axaˆx Ayaˆy Azaˆz
模的计算: | A | Ax2 Ay2 Az2
z
Az
A
方向角与方向余弦:, ,
o
Ay
Ax
y
x
cos Ax = A aˆx , cos Ay = A aˆy , cos Az A aˆz
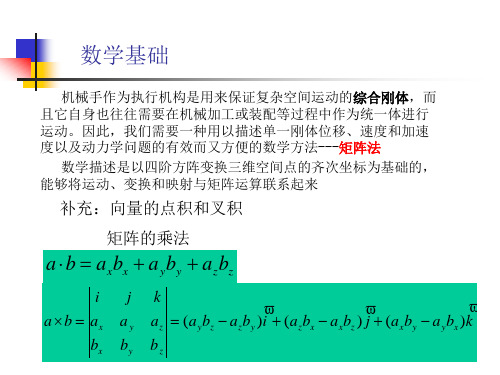
两矢量的叉积又可表示为:
aˆx aˆy aˆz A B Ax Ay Az
Bx By Bz
2.1.2 方位的描述
空间物体B的方位(Orientation)可由某个固接于此物体的坐标系{B}的三 个单位主矢量[xB,yB,zB]相对于参考坐标系A的方向余弦组成的3x3矩阵描述.
BAR n o a a
2、机器人的位姿描述与坐标变换
机器人学第二章机器人的位姿描述与坐标变换战强北京航空航天大学机器人研究所第二章 机器人的位姿描述与坐标变换 机器人的位姿连杆I 的位姿YX ZYi XiZi YwXwZw2-1、基本概念1) 自由度(Degree of Freedom, DOF):指一个点或一个物体运动的方式,或一个动态系统的变化方式。
每个自由度可表示一个独立的变量,而利用所有的自由度,就可完全规定所研究的一个物体或一个系统的位置和姿态。
也指描述物体运动所需的独立坐标数,3维空间需要6个自由度。
2) 操作臂(Manipulator):具有和人手臂(Arm)相似的功能、可在空间抓放物体或进行其它操作的机电装置。
----Arm3) 末端执行器(End-Effector):位于机器人腕部的末端,直接执行工作要求的装置。
如灵巧手、夹持器。
----Hand/Gripper4) 手腕(Wrist):位于执行器与手臂之间,具有支撑和调整末端执行器姿态功能的机构。
操作臂的组成部分之一。
5)手臂(Arm):位于基座和手腕之间,由操作手的动力关节和连杆等组成的组件。
能支撑手腕和末端执行器,并具有调整末端执行器位置的功能。
操作臂的组成部分。
Outdated!6) 世界坐标系(World Coordinate System):参照地球的直角坐标系。
7)机座坐标系、基坐标系(Base reference coordinate system):参照机器人基座的坐标系,即机器人末端位姿的参考坐标系。
8)坐标变换(Coordinate Transformation):将一个点的坐标描述从一个坐标系转换到另一个坐标系下描述的过程。
手腕机座手臂Yw XwZw9)位姿(Position&Pose):机器人末端执行器在指定坐标系中的位置和姿态。
10)工作空间(Working Space):机器人在执行任务时,其腕轴交点能在空间活动的范围。
由连杆尺寸和构形决定。
机器人的位姿描述与坐标变换
j i
R (a , ) R( Z , ) R( X , a )
Xi
Xm
Xj
cos sin j i R (a , ) 0
sin cos 0
0 1 0 0 cos a 0 1 0 sin a
0 cos sin sin a cos a 0
Yj
xi
Xi
yi
Yi
xj
Xj
xi x j cos(X i , X j ) y j cos(X i , Y j ) z j cos(X i , Z j ) i P yi x j cos(Yi , X j ) y j cos(Yi , Y j ) z j cos(Yi , Z j ) z x cos(Z , X ) y cos(Z , Y ) z cos(Z , Z ) j i j j i j j i j i
T
5 21 7
2、坐标旋转(坐标系原点相同)
Zj Zi P
坐标系j由坐标系i旋转而成 已知点P在j坐标系的坐标:
Yj
j
P [x j
yj
z j ]T
Yi Xi Xj
求点P在i坐标系的坐标:
i
P [ xi
yi
zi ]T
Zj
Zi
zi
P
yj
zj
Yj
xi
Xi
yi
Yi
xj
Xj
☺ 关于(Yi , X j )?
Z2 Z i (Z1 )
j f
R(Z i ,j )
j i
R(Y1 , )
R(Z 2 , f )
Zj
机器人运动学坐标变换

xi cos x j sin y j 0 z j yi sin x j cos y j 0 z j zi 0 x j 0 y j 1 z j
2017年2月19日星期日
工 业 机 器 人
第3章
3.2.1 直角坐标变换
工 业 机 器 人
第3章
3.1.1 机器人位姿的表示
姿态可h o p(x,y,z) h
o yh y
3.1 机器人的位姿描述
z
余弦值组成3×3的姿态
矩阵来描述。
cos(x , x h ) cos(x , yh ) cos(x , z h ) R cos(y , x h ) cos(y , yh ) cos(y , z h ) cos(z , x h ) cos(z , yh ) cos(z , z h )
2017年2月19日星期日
工 业 机 器 人
R
x , ij
第3章
3.2.1 直角坐标变换
2、旋转变换
②绕x轴旋转α角的 旋转变换矩阵为:
机器人运动学
zi
3.2 齐次变换及运算
zj
α
0 0 1 0 cos sin 0 sin cos
xj
yj oi oj
xi x j cos y j sin yi x j sin y j cos zi z j
xi
yi
xj
2017年2月19日星期日
工 业 机 器 人
第3章
3.2.1 直角坐标变换
2、旋转变换
机器人运动学
3.2 齐次变换及运算
① 绕z轴旋转θ角 若补齐所缺的有些项,再作适当变形,则有:
3位姿变换Trans-Matrix

与o-xyz之间的方位关系,即旋
0 0 1
sin z cos z 0
从
ob xb yb zb
到O-xyz的坐标变换
由
x x0 Rx b
x u cos z v sin z 得 y u sin z v cos z w z
x x0 Rxb
例题: 如图3-4所示,b 系
坐标原点与基坐标系 O-xyz 原 点重合, x 轴与 xb 轴之间的夹 角为θz,另外轴zb与轴z重合, 求表示 b 系相对于 O-xyz 的位 置矢量 x0 和方位矩阵 R,并求 空间一点从 b 系到 O-xyz 的坐 标变换。 z 解: (1)x0为零。
四、齐次坐标变换
1、 齐次坐标 将三维直角坐标系中点矢量(a,b,c)T用四维列向量 U=(x,y,z,w)T来表示,其中w是比例因子,且令a=x/w, b=y/w, c=z/w,则称(x,y,z,w)T为三维空间点(a,b,c)T的齐次坐标。 当取w=1,则(a,b,c)T的一个齐次坐标为(a,b,c,1)T。 例:
又称此矩阵为旋转矩阵
(4)R矩阵正交性:
由于n、o、a为三个坐标轴的单位矢量,于是有 n o 0, a o 0, na 0 n n 1, o o 1, a a 1 因此矩阵R是正交矩阵。 (5)刚体位姿描述: R P 用4× 4的齐次矩阵来表示刚体位姿 T 013 1 称此矩阵 为刚体位 姿矩阵
c s 0 s c 0 0 cb 0 0 1 sb 0 sb 1 0 0 cg 1 0 0 cb 0 sg 0 sg cg
[课件](工业机器人)位姿描述与齐次变换PPT
位姿描述与齐次变换PPT](https://img.taocdn.com/s3/m/711ba841caaedd3383c4d3c4.png)
根据几何学知识,上面第四小节中给定点的绝对位置为:
Ap b a b a b a c s cs b a
写成三维形式,有:
a a a c s 0a Apbbbs c 0b
3. 试按照运动顺序计算相关基本变换矩阵相乘结果
c s 0 a
Tra(An a,A sb,A0)Ro(zA t,)s0
c
0
0 b 1 0
0
1
4. 计算结果比较
两种方法结果相同!但后一种方法简单!
问题:是否仅仅按照运动变换顺序将相关的基本变 换矩阵相乘,即可以得到齐次变换阵?
0 0 0 0 0 10
O B 在A中位置,记作 A pOB
B在
A 中姿态,记作
A B
R
。
分成两块,不便于记忆!
齐次变换矩阵
若写成如下齐次形式,有:
c s 0 aa
A 1ps0 0
c
0 0
0 1 0
A 中的位置,然后与
b
A坐标原点值相加即可
得到该点绝对位置。
OA
由几何法,得:
aacbs 写成矩阵形式
b as bc
Y A
YB
b
b
XB a
OB
a
X A
a
XA
相
a c sa 对
bs cb
坐 标 值
b 1 0b 1 0B A 0R
Ap 1OBB 1pA BTB 1p
七、齐次变换矩阵
1. 构成:分为4块。左上角是姿态矩阵,为一单位正交 矩阵;右上角为对象坐标系原点位置值;左下角为 三个0 0 0,简记为0;右下角为1。
机器人编程常用的四大语言介绍

机器人编程常用的四大语言介绍伴随着机器人的发展,机器人语言也得到了发展和完善,机器人语言已经成为机器人技术的一个重要组成部分。
机器人的功能除了依靠机器人的硬件支撑以外,相当一部分是靠机器人语言来完成的。
早期的机器人由于功能单一,动作简单,可采用固定程序或者示教方式来控制机器人的运动。
随着机器人作业动作的多样化和作业环境的复杂化,依靠固定的程序或示教方式已经满足不了要求,必须依靠能适应作业和环境随时变化的机器人语言编程来完成机器人工作。
下面就来了解一下常见的机器人编程语言吧!VAL语言一、VAL语言及特点VAL语言是美国Unimation公司于1979年推出的一种机器人编程语言,主要配置在PUMA和UNIMATION等型机器人上,是一种专用的动作类描述语言。
VAL语言是在BASIC语言的基础上发展起来的,所以与BASIC语言的结构很相似。
在VAL的基础上Unimation公司推出了VALⅡ语言。
VAL语言可应用于上下两级计算机控制的机器人系统。
上位机为LSI-11/23,编程在上位机中进行,上位机进行系统的管理;下位机为6503微处理器,主要控制各关节的实时运动。
编程时可以VAL语言和6503汇编语言混合编程。
VAL语言命令简单、清晰易懂,描述机器人作业动作及与上位机的通信均较方便,实时功能强;可以在在线和离线两种状态下编程,适用于多种计算机控制的机器人;能够迅速地计算出不同坐标系下复杂运动的连续轨迹,能连续生成机器人的控制信号,可以与操作者交互地在线修改程序和生成程序;VAL语言包含有一些子程序库,通过调用各种不同的子程序可很快组合成复杂操作控制;能与外部存储器进行快速数据传输以保存程序和数据。
VAL语言系统包括文本编辑、系统命令和编程语言三个部分。
在文本编辑状态下可以通过键盘输入文本程序,也可通过示教盒在示教方式下输入程序。
在输入过程中可修改、编辑、生成程序,最后保存到存储器中。
在此状态下也可以调用已存在的程序。
第二章_位姿描述和齐次变换(2010-09)
Py Puvw j y j y ( Pu iu Pv jv Pw k w )
x
Pw P Pv o
(O')
v y
Pu
Pz Puvw jz jz ( Pu iu Pv jv Pw k w )
acr cos(
mn mn
)
位置描述(position)---点在坐标系的位置
一旦建立了一个坐标系,我们就能够用某个3×1位置矢量来确定该空 间内任一点的位置。对于直角坐标系{A},空间任一点p的位置可用3×1的 列矢量AP表示。其中,px、py、pz入是点p在坐标系{A}中的三个坐标分量。 Ap的上标A代表参考坐标系{A}。我们称Ap为位置矢量,见图2.1。
T
解2:用分步计算的方法 ① R(x, 90°)
1 0 0 1 1 P ' 0 0 - 1 2 3 0 1 0 3 2
(2-14)
② R(z, 90°)
0 - 1 0 1 3 P '' 1 0 0 3 1 0 0 1 2 2
(2.10)
旋转矩阵
设固定参考坐标系直角坐标为ΣOxyz,动坐标系为ΣO´uvw, 研究旋转变换情况。
① 初始位置时,动静坐标系重合,O、O´ 重合,如图。各轴 对应重合,设P点是动坐标系ΣO´uvw中的一点,且固定不变。 则P点在ΣO´uvw中可表示为:
z
Puvw Pu iu Pv ju Pw k w
在机器人工作台上加装一电视摄像机摄像机可见到固联着6dof关节机器人的机座坐标系原点它也可以见到被操作物体立方体的中心如果在物体中心建一局部坐标系则摄像机所见到的这个物体可由齐次变换矩阵t来表示如果摄像机所见到的机座坐标系为矩阵t处它的xyz轴分别与机座坐标系的yxz轴平行
工业机器人技术基础

机器人 末端
右手定则
直角坐标系
1 机器人坐工标业系机器人基础知识
(2)直角坐标系 由于轨迹为空间插补,所以会遇到指定的位置和姿态不
能到达,即奇异现象。 常见的奇异有:
a)4、6轴共线附件,即5轴角度0附件。 b)2、3、5轴关节坐标系原点接近共线,即已经到达工作范 围边界。 c) 5轴关节坐标系原点在Z轴正上方附近。
T6
0 n
R
0
0 n
p
1
ny
nz 0
oy oz 0
ay az 0
p
y
pz 1
3 机器人运工动业学机器人基础知识
逆运动学计算:
如何选取 某个解
3 机器人运工动业学机器人基础知识
逆动学应注意的问题:奇异性 奇异性:造成机器人运动能力缺失(缺少自由度)的特性。 工具坐标系常见的奇异有:
建立了各连杆坐标系后,n-1系与n系间的变换关系可以用坐标系的平移、旋转来实现。 从n-1系到n系的变换,可先令以n-1系绕Z n-1轴旋转θn角,再沿Z n-1轴平移dn ,然后沿Xn轴平移an ,最后绕 Xn轴旋转αn角,使得n-1系n系重合。 上述四次变换时应注意到坐标系在每次旋转或平移后发生了变动,后一次变换都是相对于动系进行的,因 此在运算中变换算子应该右乘。
动力学 ——动力学方程
惯性
离心
哥氏Leabharlann 粘摩静摩重力
外力
关节
力
力
力
擦
擦
力矩
••
•
••
•
•
B(q) q C1(q) q C2(q, q) q Fv q Fssign(q) G(q) f
2013-05-26-01-系统建模和动力学分析-坐标转换和机器人建模举例

r11 r12 r13
A
B
R
A xB
A yB
A zB r21
r22
r23
r31 r32 r33
来表示刚体B相对于坐标系{A}的方位。BAR 称为旋转矩阵。 上式中,上标A代表参考坐标系{A},下标B代表被描述的坐标系{B}。
它共有9个元素,但只有3个是独立的。由于它的三个列矢量都是单位 矢量,且两两相互垂直。
地心地固坐标系
坐标表示形式为(X,Y,Z)。它是以地球中心为坐标原点的绝对直角坐 标系,其Z轴与地轴平行指向北极点,X轴指向本初子午线与赤道的交点 ,Y轴垂直于XOZ平面,形成右手直角坐标系。
地面坐标系
坐标表示形式为(Xd,Yd,Zd)。它是一种空间直角坐标系,它假设大 地是平整的。 Yd 轴指向地球北极, Zd轴与Yd轴垂直指向背离地心的正 方向 , Xd 轴指向东,构成右手系。(也称为东北天直角坐标系)
称BAR为旋转矩阵
(2)坐标变换
坐标变换包括平移变换和旋转变换。 1.平移变换
A p B p A pBO
2.旋转变换
Ap
A B
R
B
p
3.复合变换:平移与旋转的结合
(3)齐次坐标变换
齐次坐标定义:用四维向量表示三维空间一点的位置P,即
T
P px py pz
上式称为齐次坐标,其中ω为非零常数。
坐标转换
1.由机体极坐标系到直角坐标系的转换
假设传感器安装在量测平台上,传感器对目标的量测在极坐 标系完成,获得目标的距离、方位角和高低角,(r )
如图所示,注意角度的取向。其中机体(平台)直角坐标系 是 (xp yp zp ) ,构成右手系。其转换关系是
3位姿变换Trans-Matrix

csb cg s sg ssb cg c sg cb cg
RPY逆变换
r11 r12 由 R(g , b , ) r21 r22 r31 r32
r13 r23 r33
求 g、b 和
c cb R(g , b , ) s cb sb
p xb w
u
yb
ob
v
点p在基坐标系和刚体坐 标系的位置矢量分别为
x x y z u xb v w
x0 o x y xb
坐标变换
x与xb之间的变换关系为
x x0 un vo wa
从坐标xb到基坐标x的一般变换关系式
其中C=cos,S=sin,v=1-cos 当给定旋转变换矩阵R(k,),也可以确定矢量k和转角:
r11 r12 r13 R(k , ) r r r 21 22 23 r31 r32 r33
1 r 11 r22 r33 1 cos 2 r32 r23 k 1 r13 r31 2 sin r21 r12
又称此矩阵为旋转矩阵
(4)R矩阵正交性:
由于n、o、a为三个坐标轴的单位矢量,于是有 n o 0, a o 0, na 0 n n 1, o o 1, a a 1 因此矩阵R是正交矩阵。 (5)刚体位姿描述: R P 用4× 4的齐次矩阵来表示刚体位姿 T 013 1 称此矩阵 为刚体位 姿矩阵
方向余弦矩阵为
cos( x, xb ) cos( x , yb ) cos( x, zb ) R [n o a] cos( y , x ) cos( y , y ) cos( y , z ) b b b cos( z, xb ) cos( z, yb ) cos( z, z b )
机器人技术 数学基础-位姿描述与齐次变换

nx ox ax Px
Fobject
ny
nz 0
oy oz 0
ay az 0
Py
Pz 1
二、刚体位姿的数学描述
2. 约束变量
由刚体(坐标系)在参考坐标系的齐次矩阵表达可知, 该矩阵有12个变量,但描述刚体位姿只需要6个变量(自由 度)就足够了,因此,齐次矩阵中12个变量之间并不是相互 独立的,而是有约束的,约束条件为:
(O')
y
Pxyz Px ix Py jy Pz kz Puvw Pxyz u
x
三、刚体位姿的坐标变换
② 当动坐标系ΣO´uvw绕O点回转时,求P点在固定坐标系Σoxyz 中的位置
Puvw Pu iu Pv jv Pw kw
已知:
z w
P点在ΣO´uvw中是不变的仍然成
a= x , b= y , c= z ,w为比例系数 w ww
显然,齐次坐标表达并不是唯一的,随
x
V
y z
x
y
z
w值的不同而不同。在计算机图学中,w
wT 作为通用比例因子,它可取任意正值,但
w
在机器人的运动分析中,总是取w=1 。
一、点、向量和坐标系的齐次表示
因此,习惯上用W=1表示向量的长度,用W=0表示向量的 方向,而且方向向量一般表示成单位向量的形式。形式如下:
机器人位姿描述基本术语
4) 手腕(Wrist):位于执行器与手臂之间,具 有支撑和调整末端执行器姿态功能的机构。 操作臂的组成部分之一。
手Z 腕
X
5)手臂(Arm):位于基座和手腕之间,由操作
机器人的位姿描述 PPT

即:
ip
i j
R
j
p
zi zj
oi xi oj
xj
p
yj yi
3、2 齐次变换及运算
3、另一种解释 对同一个数学表达式能够给出多种不
同的解释,前面介绍的是同一个向量在不同 的坐标系的表示之间的关系。
上述数学关系也能够在同一个坐标系 中解释为向量的“向前”移动或旋转,或则, 坐标系“向后”的移动或旋转。
坐标分量用(x, y, z) 表示,若有四个不同时为 零的数 (x, y, z, k)与三个直角坐标分量之间存 在以下关系:
x x , y y , z z
k
k
k
则称 ( x, y, z, k)是空间该点的齐次坐标。
以后用到齐次坐标时,一律默认k=1 。
3、2 齐次变换及运算
2、齐次坐标变换
为何使用齐次坐标?
M ij
ny
nz 0
oy oz 0
ay az 0
py
0
1
0
pz 1
0 0
0 0
1 0
p
y
ny
pz 1
n0z
oy oz 0
ay az 0
0 0 1
t rans( px , py , pz ) Rot(k0 , )
注意:1、这个地方的平移和旋转都是相对{i} 坐标系的,即绝对变换。
2、矩阵相乘的次序是不可交换的。
3、2 齐次变换及运算
结论:左乘和右乘原则: 绝对运动变换矩阵左乘,即先做的在右边, 后做的在左边。 相对运动变换矩阵右乘,即先做的在左边, 后做的在右边。
3、2 齐次变换及运算
例3(3-2):已知坐标系{B}先绕坐标系{A}的z轴 旋转90°,再绕坐标系{A}的x轴旋转90°,最后沿 矢量P=3i-5j+9k平移得到,求:坐标系{A}与{B} 之间的齐次坐标变换矩阵MAB。 解:绝对运动,左乘原则。
04-机器人课程-运动学

1、机器人运动学
1.5机器人微分运动及速度
机器人的微分运动是研究机器人关节变量的微小变化与机器人手部位姿的微小变化 之间的微分关系。如果已知两者之间的微分关系,就可以解决机器人微分运动的两 类基本问题:一类是在已知机器人各个关节变量的微小变化时求机器人手部位姿的 微小变化;另一类是在已知机器人手部位姿的微小变化时求机器人各个关节变量相 应的微小变化。机器人的微分运动对机器人控制、误差分析、动力分析和保证工作 精度具有十分重要的意义。
1、机器人运动学
1.3齐次变换及运算
1.3.1 直角坐标变换 在机器人中建立直角坐标系后,机器人的手部和各活动杆件之间相对位 置和姿态就可以看成是直角坐标系之间的坐标变换。
1、机器人运动学
1.3齐次变换及运算
平移变换 设坐标系{i}和坐标系{j}具有相同的姿态,但两者的坐标原点不重合,如图3-7所 示。 若用矢量Pij表示坐标系{i}和坐标系{j}原点之间的矢量,则坐标系{j}就可以看成 是由坐标系{i}沿矢量Pij平移变换而来的,所以称矢量Pij为平移变换矩阵,它是一个 3×1的矩阵
1.1、机器人位姿描述
机器人的位姿主要是指机器人手部在空间的位置和姿态,有 时也会用到其他各个活动杆件在空间的位置和姿态。需要先 了解的与机器人运动相关的一些基础知识。 机器人的机构运动简图、机器人的自由度、机器人的坐标系、 机器人的工作空间、机器人的位姿
1、机器人运动学
1.2机器人的位姿
所谓机器人的位姿主要就是指机器人手部在空间的位置和姿态。有了机器 人坐标系,机器人手部和各个活动杆件相对于其他坐标系的位置和姿态就 可以用一个3×1的位置矩阵和一个3×3的姿态矩阵来描述。如图3-2所示, 机器人手部的坐标系{H}相对于机座坐标系{O}位置就可以用坐标系{H}的 原点OH在坐标系{O}三个坐标分量xOH、yOH、zOH、组成3×1的位置矩阵来 表示
《工业机器人原理与操作》教学大纲

《工业机器人原理与操作》教学大纲一、课程的性质、地位与任务《工业机器人原理与操作》是本专业核心课,它是培养学生具有机器人设计和使用的能力,本课程主要研究机器人的结构设计与基本理论。
通过本课程的学习,可使学生掌握工业机器人基本概念、机器人运动学理论、工业机器人机械系统设计、工业机器人控制等方面的知识。
二、教学基本要求基本理解机器人的一般特征,坐标系统、位置运动学、速度运动学和动力学等。
具备机器人世界坐标系统和手坐标系统的转化,根据位置运动学、速度运动学、动力学及自动控制理论的相关知识解决问题的能力。
具体要求学生做到:1.掌握工业机器人运动系统设计方法,具有进行总体设计的能力;2.掌握工业机器人整体性能、主要部件性能的分析方法;3.掌握工业机器人常用的控制理论与方法,具有进行工业机器人控制系统设计的能力;4.了解工业机器人的新理论,新方法及发展趋向。
四、教学内容与学时安排任务一概论……4学时本章教学目的和要求:了解工业机器人的发展事由和历程,机器人的定义。
教学重点:介绍工业机器人的产生和发展过程,掌握机器人的概念、熟悉工业机器人的常见分类及其行业应用。
教学难点:工业机器人的常见分类及其行业应用任务主要内容(理论):第一节什么是工业机器人第二节为什么发展工业机器人第三节机器人的发展概况一、工业机器人的诞生二、工业机器人的发展现状和趋势第四节工业机器人的分类及应用一、工业机器人的分类二、工业机器人的应用任务二机器人的结构设计……16学时本章教学目的和要求:1.了解相关的参数含义及设置2.掌握机器人的基本结构组成3.了解机器人设计的基本原理,基本方法教学重点:机器人的基本结构组成,关节、自由度等概念。
教学难点:机器人关节、自由度的概念任务主要内容(理论):第一节机器人的基本组成及技术参数(4学时)一、机器人的基本组成二、机器人的技术参数第二节机器人总体设计(4学时)一、零部件的初认识二、机械臂设计工艺三、机械臂的装配任务主要内容(实训):的三维实体零件,并完成零件的组装。
机器人的空间描述与坐标变换
BPCBTCP APA BTBPA BTC BTCP
(2-24) (2-25)
{A}
{C}
{B}
CP
AP
OC
OB OA
图2-10 复合坐标变换
根据坐标变换的定义得
CATABTCBT
(2-26)
11
例2-3已知点u=7i+3j+2k,先对它进行绕Z轴旋转90o 的变换得点v,再对点v进行绕Y轴旋转90o的变换得 点w,求v和w。
f fxifyjfzk
以 f 为 Z 轴建立与{A}固连的坐标系{C}用n、o和f表示坐标系{C}三个坐标
轴的单位矢量,在坐标系{A}下表示为
ZA
n nxi ny j nzk o oxi oy j ozk f fxi fy j fzk
A C
R
n n
x y
ox oy
f f
x y
B
P
BAR
BP
(2-6)
图2-4旋转变换
B
Z
T A
式(2-6)即为我们要求的旋转变换关系,该变换是通过两个坐
标系之间的旋转变换实现的。
5
3.复合变换
如果两个坐标系之间即存在平移
又存在旋转,如何计算同一个空间点
在两个坐标系下描述的变换关系?
{A}
{C} {B}
BP AP
OB
为了得到位置矢量BP和AP之 间的变换关系,我们建立一个中 间坐标系{C}。
c90 0 s90 1
0
0
CAR
0
1
0
0
c 30
s 30
s90 0 c90 0 s 30 c 30
0 0