几何精度ppt课件
合集下载
几何量精度 第一章 绪论
2011-3-9
3
保证产品质量
几何量精度设计
保证加工精度
控制误差在允许范围内 是否在允许范围内 检测
• 加工误差:零件加工后
的实际值与理想值的差值。 的实际值与理想值的差值。
2011-3-9 4
优先数系是由十进等比数 列构成,其代号为R 列构成,其代号为 r
• 相应的公比代号为qr
•r的含义是在一个等比数列中, 的含义是在一个等比数列中, 相隔r项的末项与首项之比等于
10。 。
2011-3-9 5
综上所述
• 互换性是精度设计的目的; 互换性是精度设计的目的; • 标准化是精度设计的基础; 标准化是精度设计的基础; • 优化原则是精度设计的手段; 优化原则是精度设计的手段; • 检测是实现互换性的必要条件。
2011-3-9
6
参考书目
1.《机械精度设计与检测基础》 1.《机械精度设计与检测基础》 刘品等编 哈尔滨工业大学出版社 2004 2.《互换性与技术测量》 谢铁邦、 2.《互换性与技术测量》 谢铁邦、李柱等编 华中理工大学出版社 1998 3.《几何量精度设计与检测》 3.《几何量精度设计与检测》 阎荫棠编 机械工业出版社 1998 4.《互换性与测量技术基础》 4.《互换性与测量技术基础》 张 玉编 东北工业大学出版社 2001
2011-3-9 1
机械产品的设计过程
1.总体设计 . 2. 2.结构设计 3.几何量精度设计 .2011-3-9 Nhomakorabea2
产品质量
精度
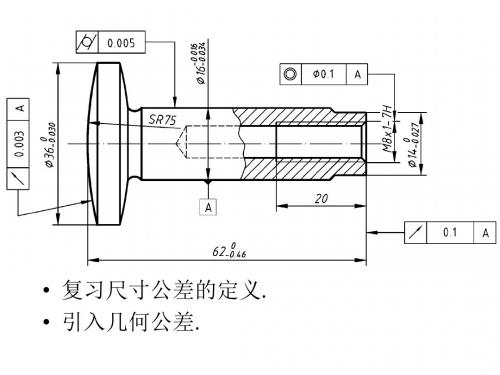
形体的尺寸、 形体的尺寸、形状 和位置精度及表面 粗糙度。 粗糙度。即加工后 它们的实际值与设 计要求的理论值相 一致的程度。 一致的程度。
几何量精度:是指构成零件几何
机械零件的几何精度

机械零件的形状误差是指零件在制造过程中出现的形状偏差。这些误差可能 会影响零件的安装、运动和相互作用。
机械零件的位置误差
机械零件的位置误差是指零件在装配和使用过程中相对于参考位置的偏差。 这会影响到零件的功能和性能。
机械零件的尺寸误差
机械零件的尺寸误差是指零件实际尺寸与设计尺寸之间的差异。尺寸误差可 能导致装配不良或者零件功能受限。
测量和评估机械零件的几何精度
测量和评估机械零件的几何精度是确保零件符合设计要求的重要步骤。我们将介绍一些常用的测量方法 和评估准则。
提高机械零件的几何精度的方 法
为了提高机械零件的几何精度,我们可以采用一些优化方法,包括改进制造 工艺、优化设计和选择更高质量的材料。
结论和要点
• 几何精度是机械零件设计和制造中的重要考虑因素。 • 形状误差、位置误差和尺寸误差可能导致零件功能和性能受到影响。 • 测量和评估几何精度的方法对于确保零件质量至关重要。 • 通过优化制造工艺和设计,我们可以提高机械零件的几何精度。
机械零件的几何精度
欢迎来参加我们的机械零件的几何精度演示!在这个演示中,我们将介绍几 何精度的定义和重要性,以及机械零件的形状误差、位置误差、尺寸误差等 方面的知识。
几何精度的定义和重要性
几何精度是指机械零件在设计和制造过程中所需达到的精确度。它对于机械系统的性能和
几何精度规范学-形状与位置精度

第4章 形状和位置精度
《几何精度规范学》多媒体课件
4.1 概述
第4章 形状和位置精度
2、形位公差的项目及符号
线
共14项,分为形状公 差和位置公差。
《几何精度规范学》多媒体课件
4.1 概述
第4章 形状和位置精度
3、形位公差带
形状和位置公差是实际被测要素对理想被测 要素的允许变动量,形位公差带就是被测要素允 许变动的几何区域。
4.1 概述
第4章 形状和位置精度
4、形位误差的评定
形位公差带是用来限制实际被测要素变动的 几何区域,实际被测要素的形位误差值只有处在 该区域内才合格。确定实际被测要素的形位误差
值就是确定最小包容区域的过程。
形位误差值就是最小包容区域的宽度或直径。 最小包容区域是与形位公差带形状、方向、位置
相同,包容实际被测要素且具有最小宽度或直径 的区域。
4.1 概述
4.1.2 形位公差
1、形位公差研究的对象
几何要素:构成零件几 何特征的点、线、面。 分类 按结构特征分: 轮廓要素、中心要素
按存在状态分: 实际要素、理想要素
第4章 形状和位置精度
《几何精度规范学》多媒体课件
4.1 概述
按所处地位分: 被测要素、基准要素
按功能关系分: 单一要素、关联要素
mm 箭头要错开尺
寸线;公差带
形状为圆
( 柱 )/ 球 时 ,
公差值前应加
指引线应与框格垂直, Ф/SФ。
正确
⊥ φ0.05 A ⊥ φ0.05 A
⊥ φ0.05 A
错误!
尽量少折弯(不一定是90°)。框格应水平或垂直放置。
《几何精度规范学》多媒体课件
4.2 形位公差的图样表示
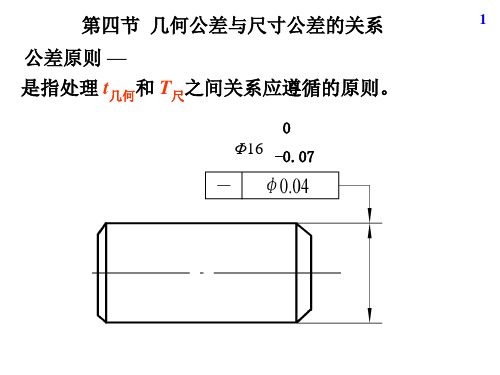
基本几何量精度——公差原则公差原则1
于极限尺寸之内,并具有材料量最多时的状态,称为
于极限尺寸之内,并具有材料量最少时的状态,称为
最大实体尺寸
最大实体尺寸(MMS) 实际要素在最大实体状态下
的极限尺寸,称为最大实体尺寸。孔和轴的最大实体
尺寸分别用 DM、dM表示。DM = Dmin;dM = dmax。 最小实体尺寸(LMS) 实际要素在最小实体状态下 的极限尺寸,称为最小实体尺寸。孔和轴的最小实体 尺寸分别用DL、 dL 表示。DL = Dmax;dL= dmin。
0.4 0.3 0.1 -0.3 -0.2 Ø19.7 Da/mm
ø20(dMMS) Ø 20.1(dMMVS)
最大实体要求应用实例(二)
如图所示,被测轴应满足下列要求: 实际尺寸在ø 11.95mm~ø 12mm之内; 实际轮廓不得超出关联最大实体实效边界,即关联体外作用尺寸不大 于关联最大实体实效尺寸dMMVS=dMMS+t=12+0.04=12.04mm 当被测轴处在最小实体状态时,其轴线对A基准轴线的同轴度误差允 许达到最大值,即等于图样给出的同轴度公差( ø 0.04 )与轴的尺 寸公差(0.05)之和( ø 0.09 )。 0
零形位公差举例
如图所示孔的轴线对A的垂直度公差,采用最大实体要求的零形 位公差。该孔应满足下列要求: 实际尺寸在ø 49.92mm~ ø 50.13mm内; 实际轮廓不超出关联最大实体边界,即其关联体外作用尺寸不小 于最大实体尺寸D=49.92mm。 当该孔处在最大实体状态时,其轴应与基准A垂直;当该孔尺寸 偏离最大实体尺寸时,垂直度公差可获得补偿。当孔处于最小实 体尺寸时,垂直度公差可获得最大 补偿值0.21mm。 ø 50+0.13 –0.08
几何公差 PPT

- 0.05/100
0.01/100
∥ 0.08/100 A
↑
(a)
(b)
A
(c)
32
第三章几何公差 3.1.3几何公差的标注
1.被测要素的标注
(4) 当被测要素为视图上的整个轮廓线(面)时,应在指示箭头的 指引线的转折处加注全周符号。如图a所示线轮廓度公差0.1mm是 对该视图上全部轮廓线的要求。其他视图上的轮廓不受该公差要 求的限制。以螺纹、齿轮、花键的轴线为被测要素时,应在几何 公差框格下方标明节径PD、大径MD或小径LD,如图(b)。
规则1:水平放置 从左到右 项目符号、公差值、基准符号、 其他附加符号。 规则2:竖直放置 从下到上 项目符号、公差值、基准符号、 其他附加符号。
21
第三章几何公差
3.1.3 几何公差的标注方法
(1) 第一格: 形位公差特征的符号。
(2) 第二格 :形位公差数值和有关符号。
(3) 第三格和以后各格 :基准字母(大写英文)和有关符号。
其标注方法又一致时,可将一个框格放在另一个框格的下方,
如图3.3c;当多个被测要素有相同的几何公差时,可以从框格
引出的指引线上绘制多个指示箭头并分别与被测要素相连,如
图3.3d。
6槽
0.05 B
⌒ 0.05
0.05
∥ 0.1 A
在a、b范围内
(a)
(b)
(c)
0.06CZ (d)
28
第三章几何公差 3.1.3几何公差的标注 1、被测要素的标注
几何公差
第三章几何公差
学 习 指导
学习目的: 掌握形位公差和形位误差的基本概念,熟悉
形位公差国家标准的基本内容,为合理选择形位 公差打下基础。 学习要求:
几何精度设计与检测
c. 如果需要就某个要素给出几种几何特征的公差,可将一个 公差框格放在另一个的下面。如图4.4(i)所示。
Jiamusi University 几何精度精度设计与检测
§4.2 几何公差的标注及其公差带
例如若同一要素有直线度要求,又有该要素对下表面的 平行度要求时的标注示例。
标注方法 (重叠)
B B
图4.1 零件的形状、方向误差
Jiamusi University 几何精度精度设计与检测
§4.1 概 述
4.1.1 几何误差的产生及其影响 1. 几何误差的产生 (1)由于零件在加工中,机床、夹具和刀具等工艺系统本身有误差;
(2)加工过程中有受力变形、振动和磨损等因素产生误差。 2. f几何对零件使用性能的影响
§4.2 几何公差的标注及其公差带
3. 基准要素的标注方法
在技术图样中,相对于被测要素的基准采用基准符号标注。 基准符号由一个标注在基准方框内的大写字母,用细实线与 一个涂黑(或空白)的三角形相连而组成,如图4.8所示。
在技术图样中,无论基准要素的方向如何,基准方格 中的字母都应水平书写,如图4.8中(c)、(d)所示。 表示基准的字母也要标注在相应被测要素的公差框格内。
§4.1 概 述
组成要素中按存在的状态又可分为:
(a) 公称组成要素—是指由技术制图或其他方法确定的理论正确 组成要素。如图4.3(a)所示。 (b) 实际(组成)要素—是指由接近实际(组成)要素所限定 的工件实际表面的组成要素部分。如图4.3(b)所示。
图4.3 几何要素定义之间的相互关系
Jiamusi University 几何精度精度设计与检测
§4.2 几何公差的标注及其公差带
4.2.1 几何公差的标注 在技术图样中一般都应用符号标注。 若无法用符号标注,可在技术要求中用文字说明或列表注明。 形位公差的代号包括:形位公差项目的符号、框格、指引线、
Jiamusi University 几何精度精度设计与检测
§4.2 几何公差的标注及其公差带
例如若同一要素有直线度要求,又有该要素对下表面的 平行度要求时的标注示例。
标注方法 (重叠)
B B
图4.1 零件的形状、方向误差
Jiamusi University 几何精度精度设计与检测
§4.1 概 述
4.1.1 几何误差的产生及其影响 1. 几何误差的产生 (1)由于零件在加工中,机床、夹具和刀具等工艺系统本身有误差;
(2)加工过程中有受力变形、振动和磨损等因素产生误差。 2. f几何对零件使用性能的影响
§4.2 几何公差的标注及其公差带
3. 基准要素的标注方法
在技术图样中,相对于被测要素的基准采用基准符号标注。 基准符号由一个标注在基准方框内的大写字母,用细实线与 一个涂黑(或空白)的三角形相连而组成,如图4.8所示。
在技术图样中,无论基准要素的方向如何,基准方格 中的字母都应水平书写,如图4.8中(c)、(d)所示。 表示基准的字母也要标注在相应被测要素的公差框格内。
§4.1 概 述
组成要素中按存在的状态又可分为:
(a) 公称组成要素—是指由技术制图或其他方法确定的理论正确 组成要素。如图4.3(a)所示。 (b) 实际(组成)要素—是指由接近实际(组成)要素所限定 的工件实际表面的组成要素部分。如图4.3(b)所示。
图4.3 几何要素定义之间的相互关系
Jiamusi University 几何精度精度设计与检测
§4.2 几何公差的标注及其公差带
4.2.1 几何公差的标注 在技术图样中一般都应用符号标注。 若无法用符号标注,可在技术要求中用文字说明或列表注明。 形位公差的代号包括:形位公差项目的符号、框格、指引线、
第四章 几何精度设计与检测03
dfi =
da - f几何 形状 误差 实际 尺寸
3. 最大实体实效状态(MMVC) 和最大实体实效尺寸(MMVS) MMVC— 是指实际要素在给定长度上处于MMC,且其中心要
8
素的 f几何= t几何 时综合状态。
MMVC
(a)
给定长度
(b)
MMVS — 是指在MMVC下的尺寸。 最大实 体尺寸
φ0.1
18
Φ16 A (c)
例 4.4 按下图加工孔得: Da=Φ16 , f⊥=0.2 , 求孔的MMS、LMS、EFS、MMVS。 (4)解: DM=Φ16, DL=Φ 16.07 Dfe=Da–f⊥ = Φ 16–0. 2=Φ15. 8 DMV=DM–t⊥ = Φ 16–0. 1=Φ15.9
解:按题意可得
Dmax=Φ50.039 , Dfe= Da–f– =
50.02 0.01 50.01
Dmin=Φ50
则 Dfe=Φ50.01> DM = Dmin =
50
Da= Φ50.02 < DL= Dmax = Φ50.039 合格
2.最大实体要求(MMR) (1)图样标注 见下图(图4.31(a) M
且 Dmin≤Da≤Dmax
用下例说明:
= 0.1+T尺寸
27
0
t =0.1+( dM – da)
T尺寸
补偿
t几何
tmax允许 t给定值 T尺寸
28
最大实体要求的应用:
最大实体要求用于只要求可装配性的要素。
最大实体要求的检测:
最大实体要求一般用功能量规来检验。
3.最小实体要求(LMR)
23
dfe≤dM= dmax
精度设计第4章 几何公差
最小条件及最小包容区域
最小条件是提取被测要素对其拟合要素的最大变 动量为最小。
最小包容区域是包容被测提取要素并且有最小宽 度或直径的区域,即满足最小条件的包容区域。 方向位置公差要求的被测提取要素的最小包容区 域,构成要素与基准应保持方向要求。 位置公差要求的被测提取素的最小包容区域,构 成要素与基准既保持方向要求,还应保持理想位 置要求。
• 一、几何误差的评定 • 几何公差带与最小包容区域(包容被测实际要素 并且具有最小宽度或直径的区域)都具有大小、 形状和方位三要素,二者的形状和方位相同,大 小不同。 • 最小包容区域的尺度即为几何误差值; • 零件的几何误差合格条件: • f(几何误差值)<t(几何公差值),即被测要 素的最小包容区域必须被相应的几何公差带所包 容。
平行平 面形状
平行直线形状
四棱柱 形状
同心圆 形状 同轴圆柱面
t
圆柱 形状
形状公差
• 单一要素对其理想要素允许的变动量。其公 差带只有大小和形状,无方向和位置的限制。 • 直线度 _ • 平面度 _ • 圆度 _ • 圆柱度 _
直线度公差
•直 线 度 公 差 用 于 控 制 直线和轴线的形状误差, 根据零件的功能要求, 直线度可以分为在给定 平面内,在给定方向上 和在任意方向上三种情 •在给定平面内的直线度 况。 •在给定方向内的直线度
a)六孔组的图样标注 b)六孔组的几何框图 c)六孔组的位置度公差带
面轮廓度
• 面轮廓度公差带是包 络一系列直径为公差 值t的球的两包络面之 间的区域,诸球的球 心应位于理想轮廓面 上。如图所示。 • 面轮廓度也分无基准 要求的面轮廓度公差、 有基准要求的面轮廓 度公差。
公差带的特点
机械设计基础第二章机械零件的几何精度(尺寸精度)
一、互换性 1.互换性概念 指同一规格的一批零、部件中,任取其中一件,不 需要任何挑选或附加加工(如钳工修理)就能进行装配, 并能满足使用性能要求的一种特性。 例如手表、自行车等的零件损坏后,只要换上同样规 格的零件,就能恢复手表和自行车的功能。
2.实现互换性的意义
凡重复生产、分散制造、集中装配的产品都应当具有互 换性。 (1)便于组织生产协作,进行专业化生产,提高生产效率, 降低产品成本 (2)便于及时更换失效的零件,方便维修,从而延长了机器 的使用寿命 (3)便于简化设计计算、制图工作,缩短设计周期,并有利 于用计算机进行辅助设计,这对发展系列产品、改进产 品性能都有重大作用。 零部件的互换性,通常包括几何参数、机械性能、物 理化学性能的互换。本章仅讨论几何参数的互换。
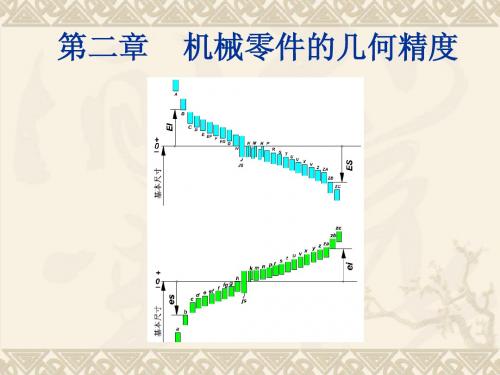
三、偏差、公差、公差带的术语及定义
1.尺寸偏差 尺寸偏差:某一尺寸减其基本尺寸所得的代数差。
实际偏差:实际尺寸减其基本尺寸所得的代数差。 极限偏差:极限尺寸减其基本尺寸所得的代数差。(示意图) 上偏差:最大极限尺寸减其基本尺寸所得的代数差 。用代号 ES(孔)、es(轴)表示。即 ES=Dmax-D es=dmax-d 下偏差: 最小极限尺寸减其基本尺寸所得的代数差。用代号 EI(孔)、ei(轴)表示。即EI=Dmin-D ei=dmin-d 实际偏差在极限偏差范围内即为合格。
0.038 0.07
0.015
0.013
**公差与偏差的区别:
公差是一个没有正、负符号的绝对值,不能为零 (1)从数值看 偏差是代数量,可能正、负或零 公差表示制造精度要求,反映加工难易程度, 限制误差,对单个零件无公差可言 (2)从作用看 极限偏差用于限制实际偏差,实际偏差取决 于机床的调整,不反映加工难易程度。单个 零件能测出。
2.实现互换性的意义
凡重复生产、分散制造、集中装配的产品都应当具有互 换性。 (1)便于组织生产协作,进行专业化生产,提高生产效率, 降低产品成本 (2)便于及时更换失效的零件,方便维修,从而延长了机器 的使用寿命 (3)便于简化设计计算、制图工作,缩短设计周期,并有利 于用计算机进行辅助设计,这对发展系列产品、改进产 品性能都有重大作用。 零部件的互换性,通常包括几何参数、机械性能、物 理化学性能的互换。本章仅讨论几何参数的互换。
三、偏差、公差、公差带的术语及定义
1.尺寸偏差 尺寸偏差:某一尺寸减其基本尺寸所得的代数差。
实际偏差:实际尺寸减其基本尺寸所得的代数差。 极限偏差:极限尺寸减其基本尺寸所得的代数差。(示意图) 上偏差:最大极限尺寸减其基本尺寸所得的代数差 。用代号 ES(孔)、es(轴)表示。即 ES=Dmax-D es=dmax-d 下偏差: 最小极限尺寸减其基本尺寸所得的代数差。用代号 EI(孔)、ei(轴)表示。即EI=Dmin-D ei=dmin-d 实际偏差在极限偏差范围内即为合格。
0.038 0.07
0.015
0.013
**公差与偏差的区别:
公差是一个没有正、负符号的绝对值,不能为零 (1)从数值看 偏差是代数量,可能正、负或零 公差表示制造精度要求,反映加工难易程度, 限制误差,对单个零件无公差可言 (2)从作用看 极限偏差用于限制实际偏差,实际偏差取决 于机床的调整,不反映加工难易程度。单个 零件能测出。
形状及位置精度

目前按最小条件评定圆度误差的方法在企业中应 用普遍,即用两同心圆包容实际轮廓,且至少四 点实际测点内外相间地分布在两个同心圆上,圆 度误差是两同心圆的半径差。此误差必为符合最 小条件的圆度误差值。 也用最小二乘法进行评定。
四. 圆柱度
圆柱度公差用于限制圆柱面的形状误差,对圆柱 面的形状精度提出要求
(3)高精度中等、较大尺寸的零 件,用光轴法测量
符合中国国家标准GB/T 11336:<直线度误差检测> “Measurement of departures from straightness”
代表性的有两类:直接光轴法测量和间接光轴法测量 直接光轴法测量分为激光束加四相限光电管(精度 5~10um/m,美国光动公司)法和无衍射光束 为空间直线基准加CCD法(精度1~4um/m, 华中科技大学),量程大,两位安装,调节较方便. 间接光轴法测量分为单频激光干涉仪(精度1~5u m/m,英国renishaw公司)和双频激光干涉仪(精 度1~4um/m,美国HP-Agilent公 司),三位安装,量程小,增大量程会使精度快速下 降. 无衍射光束法,单频激光干涉仪和双频激光干涉仪都 采取直线基准稳定补偿措施. 举例:德国精密导轨磨的直线度误差测量与控制
(4)对于高精度中等、较大尺寸的零件, 用自准直仪或水平仪测量。(注:相对法,有累
积误差)(瑞士的elautocollimator )
例:用水平仪测量一零件的直线度误差,水平仪 的分度值为0.01mm (格) /m,若实际分度值 i=1.8(μm),测量数据如下: 测点 1 2 3 读数(格) 3 0 0
给定任意方向的 直线度公差带, 它表示实际轴心 线只允许在公差 t4所确定的圆柱 体内变动
几何精度ppt课件
38
第2章 几何精度
尺寸公差带是由代表上、下偏差的两条直线 所限定的区域,这个“带”的长度可任意绘出。形 位公差带控制的不是两点之间的距离,而是点(平 面、空间)、 线(素线、轴线、曲线)、面(平 面、曲面)、圆(平面、空间、整体圆柱)等区域, 所以它不仅有大小, 而且还具有形状、方向、位 置共4个要素。
0.02 B
Ø0.05 A
Ød
B (a)靠近轮廓线
A
(b)靠近轮廓线的延长线
27
第2章 几何精度
规则5:当基准要素为中心要素时,应把基准符号的粗短横线靠近置放于 基准轴线或基准平面中心所对应的轮廓要素的尺寸线的一个箭 头,并且基准符号的细实线应与该尺寸线对齐.
0.05 A
对 齐
A
28
Ød2 Ød1
25
第2章 几何精度
规则2:表示基准的字母也要标注在相应被测要素的位置公差框格内
0.02 B
Ø0.05 A
Ød
A
B
(a)靠近轮廓线
(b)靠近轮廓线的延长线
规则3:为了避免混淆和误解,基准所使用的字母不得采用E,F,I, J,L,M,O,P,R等九个字母
26
第2章 几何精度
规则4:当基准要素为轮廓要素时,应把基准符号的粗短横线靠近于该要素的轮 廓线上(或延长线上),并且粗短横线置放处必须与尺寸线明显错开
2.1.3 形状公差及其公差带
1. 直线度 2. 平面度 3. 圆度 4. 圆柱度
43
第2章 几何精度
▪ 1. 直线度:
▪ 直线度公差是实际直线对理想直线的允许变动量,限制了 加工面或线在某个方向上的偏差,如果直线度超差有可能 导致该工件安装时无法准确装入工艺文件规定的位置。
第2章 几何精度
尺寸公差带是由代表上、下偏差的两条直线 所限定的区域,这个“带”的长度可任意绘出。形 位公差带控制的不是两点之间的距离,而是点(平 面、空间)、 线(素线、轴线、曲线)、面(平 面、曲面)、圆(平面、空间、整体圆柱)等区域, 所以它不仅有大小, 而且还具有形状、方向、位 置共4个要素。
0.02 B
Ø0.05 A
Ød
B (a)靠近轮廓线
A
(b)靠近轮廓线的延长线
27
第2章 几何精度
规则5:当基准要素为中心要素时,应把基准符号的粗短横线靠近置放于 基准轴线或基准平面中心所对应的轮廓要素的尺寸线的一个箭 头,并且基准符号的细实线应与该尺寸线对齐.
0.05 A
对 齐
A
28
Ød2 Ød1
25
第2章 几何精度
规则2:表示基准的字母也要标注在相应被测要素的位置公差框格内
0.02 B
Ø0.05 A
Ød
A
B
(a)靠近轮廓线
(b)靠近轮廓线的延长线
规则3:为了避免混淆和误解,基准所使用的字母不得采用E,F,I, J,L,M,O,P,R等九个字母
26
第2章 几何精度
规则4:当基准要素为轮廓要素时,应把基准符号的粗短横线靠近于该要素的轮 廓线上(或延长线上),并且粗短横线置放处必须与尺寸线明显错开
2.1.3 形状公差及其公差带
1. 直线度 2. 平面度 3. 圆度 4. 圆柱度
43
第2章 几何精度
▪ 1. 直线度:
▪ 直线度公差是实际直线对理想直线的允许变动量,限制了 加工面或线在某个方向上的偏差,如果直线度超差有可能 导致该工件安装时无法准确装入工艺文件规定的位置。
机械零件的几何精度(尺寸精度)

b )画法:
1)零线。
2)确定公差带大小、位置。
3)孔 、轴
(或
) 或在公差带里写孔、轴。
4)作图比例基本一致,单位 µm 、mm均可。
5)基本尺寸相同的孔、轴公差带才能画在一张图上。
c)公差带特性:
两个要素 公差带大小 T 公差带相对零线位置
标准公差 基本偏差
例:画尺寸公差带图:
轴Ø25
0.020 0.033
dmin = d +ei = 30 -0.041=29.959mm
查表1-4得:M的基本偏差(上偏差) ES =-8+Δ=-8+12=+4μm=+0.004 mm M8的下偏差 EI=ES-IT=+0.004-0.033=-0.029 mm 孔ø30 M8的极限尺寸 Dma= D + ES = 30+0.004= 30.004 mm Dmin=D + EI = 30-0.029= 29.971 mm
或 Ts =│es- ei │=│+0.015 -(-0.013)│=0.028 mm
可标注为孔
40
0.03,8 轴
0.07
40 0.015 0.013
**公差与偏差的区别:
公差是一个没有正、负符号的绝对值,不能为零 (1)从数值看
偏差是代数量,可能正、负或零
公差表示制造精度要求,反映加工难易程度, 限制误差,对单个零件无公差可言
4.极限尺寸 一个孔或轴允许的尺寸的两个 极端。实际尺寸应位于其中,也可达到极限 尺寸。孔或轴允许的最大尺寸称为最大极限 尺寸;孔或轴允许的最小尺寸称为最小极限
尺寸 。
孔和轴的最大极限尺寸分别用Lmax和lmax表示, 最小极限尺寸分别用Lmin和lmin表示。
第2篇尺寸精度

目的:扩大标准应用范围
L
一般长度尺寸
《几何精度规范学》多媒体课件
2.1 尺寸精度基础知识
第2章 尺寸精度
2.1.1 有关尺寸的术语及定义
用特定单位表示长度值或角度值的数值称为尺寸。 包括线性尺寸和角度尺寸。 1.基本尺寸(公称尺寸)(D、d) : 设计确定的尺寸 。 2.极限尺寸:允许尺寸变化的两个界限值。
第2章 尺寸精度
3.公差带及公差带图
由上下偏差所表示的区域称为公差带。
零线上 方+表 示正偏 差 零线下 方-表 示负偏 差
不写 ES
EI TD 或H7代替TD
TD Td
或e6代替Td
es Td
不写
ei
注意 在公差带图上,必须注上基本尺寸
和偏差值(偏差值单位可以是mm或um)!
《几何精度规范学》多媒体课件
ES EI 基本偏差EI
标准公差=上偏差下偏差:国家标 准所规定的用来 确定公差带大小 的公差值 。与精 度等级高低和基 本尺寸有关。
es 基本偏差es 基 本 偏 差 : 指 靠 近零线或位于零 线的极限偏差。
ei
《几何精度规范学》多媒体课件
第2章 尺寸精度
2.2 线性尺寸精度(极限制)
2.2.1 标准公差 1.标准公差等级及其代号(IT)
D= 80 120 =97.98mm i=2.173μm
《几何精度规范学》多媒体课件
2.2 线性尺寸精度(极限制)
第2章 尺寸精度
标准公差系列
大于 标准公差为国家标准所规定的任一公差。所有标准 公差的集合就是标准公差系列。
公差等级 基本尺寸
D=18mm, IT8=?27μm
标准公差数值
相关主题
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第三格填写被 测要素的基准 所使用的字母 和有关符号。
.
19
第2章 几何精度
位置公差框格中的内容填写示例(五格)
Ø0.03 M C A B
必须指出,从公差框格第三格起填写基准字母 时,基准的顺序在该框格中是固定的。
总是第三格填写第一基准
第四格和第五格填写第二基准和第三基准,
而与字母在字母表中的顺序无关
× ×× × ×× ×
×
规则2:指引线引向被测要素时允许弯折,但不得多于两次.
标注几何公差在图样上的用公差框格、带箭头框格 指引线和基准符号表示:
0.004
0.05 A
A
ø40j6
ø
ø
.
16
第2章 几何精度
1.几何公差的标注
1)几何公差框格 2)带箭头的形位公差框格指引线 3)基准符号 4)几何公差标注的简化 5)几何公差带
.
17
第2章 几何精度
1)几何公差框格
规则1:水平放置 从左到右 项目符号 公差值 基准符号 其他附加符号 规则2:竖直放置 从下到上项目符号 公差值 基准符号 其他附加符号
A
.
10
第2章 几何精度
4.按功能关系分类
功能关系是指要素间某种确定的方向和位置关系,如垂直、平 行、同轴、对称等。也即具有位置公差要求的要素。
(1)单一要素
仅对其本身给出形状公差要求的要素。
(2)关联要素
对其他要素有功能关系的要素, 即规定位置公差的要素。
.
11
第2章 几何精度
关联要素 单一要素
第2章 几何精度
2.1 几何公差的概念 2.2 公差原则 2.3 几何公差的选用 思考题与习题
.
1
第2章 几何精度
目的要求
• 熟记14个形位公差特征项目的名称和符号。 • 理解掌握14个项目公差带的特点。 • 掌握公差原则中独立原则、包容要求及最大实体要求的基本
内容,会标注、理解含义、明确主要应用场合。 • 掌握评定形位误差时“最小条件”的概念,会应用“最小条
具有几何学意义,没有任何误差的要素,设计 样上表示的要素均为理想要素。
(2)实际要素
时在图
零件在加工后实际存在,有误差的要素。它通常由测得 要素来代替。由于测量误差的存在,测得要素并非该要素的 真实情况。
理想要素和实际要素都可分为轮廓要素和中心要素
.
8
第2章 几何精度
3.按在几何公差中所处的地位分类
.
13
第2章 几何精度
.
14
第2章 几何精度
1.几何公差的标注
按几何公差国家标准的规定,在图样上标注 形位公差时,应采用代号标注。无法采用代号标注 时,允许在技术条件中用文字加以说明。几何公差 项目的符号、框格、指引线、公差数值、基准符号 以及其他有关符号构成了几何公差的代号。
.
15
第2章 几何精度
.
5
第2章 几何精度
2.1.1 零件的几何误差与几何公差基本概念
1 几何要素
构成零件几何特征的点、线、面称为零件的几何要素。
任何零件不论其复杂程度如何,它都是由许多要素组成的。
圆锥面
圆柱面
圆台面
球面
轴线ห้องสมุดไป่ตู้
素线
球心
图1
几何公差研究对象就是几何要素,即点、线、面。
.
6
第2章 几何精度
1.按几何结构特征分类
.
3
第2章 几何精度
如车削时由三爪卡盘夹紧的环形工件,会因夹紧力使工件变形成为棱圆形,见 图2-1; 钻孔时钻头移动方向与工作台面不垂直,会造成孔的轴线对定位基面的垂直度 误差,见图2-2。
图 2-1 车削形成的形状误差
.
图 2-2 钻削形成的位置误差
4
第2章 几何精度
概述
由于加工过程中工件在机床上的定位误差、刀具与工件的
件”评定形位误差的大小。 • 初步掌握形位公差的选用方法。 • 了解标准中有关形位公差的公差等级及未注公差的规定。
.
2
第2章 几何精度
2.1 几何公差的概念
2.1.1 零件的几何误差与几何公差基本概念 2.1.2 方向公差的特征项目及其符号 2.1.3 形状公差及其公差带 2.1.4 方向、位置、跳动公差及其公差带
形状公差框----两格,
位置公差框----三~五格
0.01
0.03 A
A
.
18
第2章 几何精度
三格的位置公差框格中的内容填写示例
ø0.05 M A M
与基准要素有关的符号 基准符号字母 与被测要素有关的符号 公差值 公差项目
指引线
第一格填写 公差特征项 目符号
第二格填写用 以毫米为单位 表示的公差值 和有关符号
(1) 被测要素
零件图中给出了形状或(和)位置公差要求,即需要检测 的要素。
(2) 基准要素
用以确定被测要素的方向或位置的要素,简称基准。
被测要素和基准要素可以是中心要素,也可以是轮廓要素, 它们均有理想和实际两种情况。
.
9
第2章 几何精度
3.按在几何公差中所处的地位分类
被测 要素
0.05 A
基准 要素
0.03 A 0.02
A
注意:
上述几何要素分类后的名称将在后面经常出现 ,须注意的是一个要素在不同的场合,它的名称 会有不同的称呼。
.
12
第2章 几何精度
2.1.2 方向公差的特征项目和符号
为控制机器零件的几何误差,提高机器的精 度和延长使用寿命,保证互换性生产,国家标准 GB/T1182-2008规定了19项几何公差项目。其项目 的名称和符号见表 2-1。
相对运动不正确、夹紧力和切削力引起的工件变形、工件的内
应力的释放等原因,完工工件会产生各种形状和位置误差。 各种形状和位置误差都将会对零件的装配和使用性能产生
不同程度的影响。
因此机械类零件的几何精度,除了必须规定适当的尺寸 公差和表面粗糙度要求以外,还须对零件规定合理的形状和 位置公差。
在实际生产中,形状和位置公差(几何公差)是机械零件加工精 度的重要指标。
.
20
第2章 几何精度
规则3:当公差带的形状是圆时,形位公差值的数字前则加注
“Ø”。 Ø0.3 A B
B
86
100
.
A
21
第2章 几何精度
当公差带的形状是圆球时,形位公差值的数字前则加注“SØ”。
sØ0.1 A B
A 被 测 球 心
B
Ø
.
22
第2章 几何精度
2)带箭头的形位公差框格指引线
规则1:指引线从形位公差框格两端垂直引出,指向被测要素
(1)轮廓要素
构成零件轮廓的可直接触及的点、线、面。如图4-3所 示的圆锥顶点、素线、圆柱面、圆锥面、端平面、球面等。
(2)中心要素
不可触及的,轮廓要素对称中心所示的点、线、面。如 图4-3所示的球心、轴线等。
中心要素和轮廓要素均有理想与实际两种情况。
.
7
第2章 几何精度
2.按存在状态分类
(1)理想要素
.
19
第2章 几何精度
位置公差框格中的内容填写示例(五格)
Ø0.03 M C A B
必须指出,从公差框格第三格起填写基准字母 时,基准的顺序在该框格中是固定的。
总是第三格填写第一基准
第四格和第五格填写第二基准和第三基准,
而与字母在字母表中的顺序无关
× ×× × ×× ×
×
规则2:指引线引向被测要素时允许弯折,但不得多于两次.
标注几何公差在图样上的用公差框格、带箭头框格 指引线和基准符号表示:
0.004
0.05 A
A
ø40j6
ø
ø
.
16
第2章 几何精度
1.几何公差的标注
1)几何公差框格 2)带箭头的形位公差框格指引线 3)基准符号 4)几何公差标注的简化 5)几何公差带
.
17
第2章 几何精度
1)几何公差框格
规则1:水平放置 从左到右 项目符号 公差值 基准符号 其他附加符号 规则2:竖直放置 从下到上项目符号 公差值 基准符号 其他附加符号
A
.
10
第2章 几何精度
4.按功能关系分类
功能关系是指要素间某种确定的方向和位置关系,如垂直、平 行、同轴、对称等。也即具有位置公差要求的要素。
(1)单一要素
仅对其本身给出形状公差要求的要素。
(2)关联要素
对其他要素有功能关系的要素, 即规定位置公差的要素。
.
11
第2章 几何精度
关联要素 单一要素
第2章 几何精度
2.1 几何公差的概念 2.2 公差原则 2.3 几何公差的选用 思考题与习题
.
1
第2章 几何精度
目的要求
• 熟记14个形位公差特征项目的名称和符号。 • 理解掌握14个项目公差带的特点。 • 掌握公差原则中独立原则、包容要求及最大实体要求的基本
内容,会标注、理解含义、明确主要应用场合。 • 掌握评定形位误差时“最小条件”的概念,会应用“最小条
具有几何学意义,没有任何误差的要素,设计 样上表示的要素均为理想要素。
(2)实际要素
时在图
零件在加工后实际存在,有误差的要素。它通常由测得 要素来代替。由于测量误差的存在,测得要素并非该要素的 真实情况。
理想要素和实际要素都可分为轮廓要素和中心要素
.
8
第2章 几何精度
3.按在几何公差中所处的地位分类
.
13
第2章 几何精度
.
14
第2章 几何精度
1.几何公差的标注
按几何公差国家标准的规定,在图样上标注 形位公差时,应采用代号标注。无法采用代号标注 时,允许在技术条件中用文字加以说明。几何公差 项目的符号、框格、指引线、公差数值、基准符号 以及其他有关符号构成了几何公差的代号。
.
15
第2章 几何精度
.
5
第2章 几何精度
2.1.1 零件的几何误差与几何公差基本概念
1 几何要素
构成零件几何特征的点、线、面称为零件的几何要素。
任何零件不论其复杂程度如何,它都是由许多要素组成的。
圆锥面
圆柱面
圆台面
球面
轴线ห้องสมุดไป่ตู้
素线
球心
图1
几何公差研究对象就是几何要素,即点、线、面。
.
6
第2章 几何精度
1.按几何结构特征分类
.
3
第2章 几何精度
如车削时由三爪卡盘夹紧的环形工件,会因夹紧力使工件变形成为棱圆形,见 图2-1; 钻孔时钻头移动方向与工作台面不垂直,会造成孔的轴线对定位基面的垂直度 误差,见图2-2。
图 2-1 车削形成的形状误差
.
图 2-2 钻削形成的位置误差
4
第2章 几何精度
概述
由于加工过程中工件在机床上的定位误差、刀具与工件的
件”评定形位误差的大小。 • 初步掌握形位公差的选用方法。 • 了解标准中有关形位公差的公差等级及未注公差的规定。
.
2
第2章 几何精度
2.1 几何公差的概念
2.1.1 零件的几何误差与几何公差基本概念 2.1.2 方向公差的特征项目及其符号 2.1.3 形状公差及其公差带 2.1.4 方向、位置、跳动公差及其公差带
形状公差框----两格,
位置公差框----三~五格
0.01
0.03 A
A
.
18
第2章 几何精度
三格的位置公差框格中的内容填写示例
ø0.05 M A M
与基准要素有关的符号 基准符号字母 与被测要素有关的符号 公差值 公差项目
指引线
第一格填写 公差特征项 目符号
第二格填写用 以毫米为单位 表示的公差值 和有关符号
(1) 被测要素
零件图中给出了形状或(和)位置公差要求,即需要检测 的要素。
(2) 基准要素
用以确定被测要素的方向或位置的要素,简称基准。
被测要素和基准要素可以是中心要素,也可以是轮廓要素, 它们均有理想和实际两种情况。
.
9
第2章 几何精度
3.按在几何公差中所处的地位分类
被测 要素
0.05 A
基准 要素
0.03 A 0.02
A
注意:
上述几何要素分类后的名称将在后面经常出现 ,须注意的是一个要素在不同的场合,它的名称 会有不同的称呼。
.
12
第2章 几何精度
2.1.2 方向公差的特征项目和符号
为控制机器零件的几何误差,提高机器的精 度和延长使用寿命,保证互换性生产,国家标准 GB/T1182-2008规定了19项几何公差项目。其项目 的名称和符号见表 2-1。
相对运动不正确、夹紧力和切削力引起的工件变形、工件的内
应力的释放等原因,完工工件会产生各种形状和位置误差。 各种形状和位置误差都将会对零件的装配和使用性能产生
不同程度的影响。
因此机械类零件的几何精度,除了必须规定适当的尺寸 公差和表面粗糙度要求以外,还须对零件规定合理的形状和 位置公差。
在实际生产中,形状和位置公差(几何公差)是机械零件加工精 度的重要指标。
.
20
第2章 几何精度
规则3:当公差带的形状是圆时,形位公差值的数字前则加注
“Ø”。 Ø0.3 A B
B
86
100
.
A
21
第2章 几何精度
当公差带的形状是圆球时,形位公差值的数字前则加注“SØ”。
sØ0.1 A B
A 被 测 球 心
B
Ø
.
22
第2章 几何精度
2)带箭头的形位公差框格指引线
规则1:指引线从形位公差框格两端垂直引出,指向被测要素
(1)轮廓要素
构成零件轮廓的可直接触及的点、线、面。如图4-3所 示的圆锥顶点、素线、圆柱面、圆锥面、端平面、球面等。
(2)中心要素
不可触及的,轮廓要素对称中心所示的点、线、面。如 图4-3所示的球心、轴线等。
中心要素和轮廓要素均有理想与实际两种情况。
.
7
第2章 几何精度
2.按存在状态分类
(1)理想要素