arduino控制舵机程序
舵机驱动程序

舵机驱动程序所用的舵机型号为Tower Pro Micro Servo 99 SG90,单片机型号为Atmega16。
舵机有三根引出线:VCC,GND,CONTROL。
VCC,GND为舵机的电源线,CONTROL为舵机控制信号的输入线。
控制信号为50Hz的PWM波形(矩形波),不同的脉宽(占空比)对应舵机不同的方位角。
改变脉宽即可改变舵机的方位角。
在没有过载且控制信号持续稳定的条件下,舵机的方位角严格保持不变.此控制信号适合所有类型的舵机.需要注意的是尽管也可以用延时函数来实现PWM波,但舵机运行可能不平稳,而且若PWM波的频率偏离50Hz过大,舵机会出现震颤甚至会无法启动舵机!下面给出了一特定脉宽的舵机控制信号,PB7为控制信号的输出端口。
程序中采用T/C0定时器中断的方式来产生PWM波形,信号更准确.需要说明的是,因程序脉宽调整得原理,脉宽的可能取值是离散的,只能得到一些特定位置,但对于普通的执行机构,是能够满足要求的。
//ICC—AVR application builder : 2010—9-21 10:22:14// Target : M16// Crystal: 8。
0000Mhz#include 〈iom16v。
h>#include 〈macros.h>//servo—driveunsigned int count_T=0;unsigned int angle=3;// set angle//note: change the value of angle(0~5),then you can get different angle //position of the servo//TIMER0 initialisation - prescale:64// WGM: Normal// desired value: 0.5mSec// actual value: 0.499mSec (0.2%)void timer0_init(void){TCCR0 = 0x00;//stopTCNT0 = 0xC2; //set countOCR0 = 0x00; //set compareTCCR0 = 0x03; //start timer}#pragma interrupt_handler timer0_comp_isr:20void timer0_comp_isr(void){//compare occured TCNT0=OCR0if(count_T<angle) PORTB|=(1〈<PB7);//PB7 as output port to control servo else PORTB&=~(1〈〈PB7);count_T++;count_T%=40;}//call this routine to initialize all peripherals void init_devices0(void){//stop errant interrupts until set upCLI();//disable all interruptstimer0_init();MCUCR = 0x00;GICR = 0x00;TIMSK = 0x02; //timer interrupt sourcesSEI(); //re—enable interrupts//all peripherals are now initialized}//port initialvoid port_init( ){DDRA = 0x00;DDRB = 0x10; //PB7 as output port to control servo DDRC = 0x00;DDRD = 0x00;PORTA = 0x00;PORTB = 0x00;PORTC = 0x00;PORTD = 0x00;}void main(){port_init();init_devices0( );while(1);}。
arduino舵机控制

arduino舵机控制第一章:引言引言部分将介绍Arduino(亦称为Genuino)舵机控制的背景和意义,舵机的概述,以及本论文的研究目的和框架。
第二章:舵机控制原理及方法本章将介绍舵机的工作原理和控制方法。
首先,对舵机的构成和工作原理进行简要介绍,包括电机、位置反馈和驱动电路等方面。
然后,介绍传统的舵机控制方法,如PWM控制和位置控制,以及最近的一些控制方法,如PID控制和闭环控制。
最后,讨论Arduino对舵机控制的适用性和优势。
第三章:Arduino舵机控制系统设计在本章中,将详细介绍基于Arduino的舵机控制系统的设计。
首先,介绍Arduino的硬件和软件环境,包括Arduino开发板、Arduino IDE编程环境和各种相关的库函数。
然后,介绍舵机的连接方式,包括电源和信号线的连接。
接着,介绍舵机控制系统的软件设计,包括初始化舵机、设定目标位置和控制舵机运动的实现方法。
最后,进行系统功能测试和性能评估。
第四章:实验结果与讨论在这一章中,将介绍本研究设计的Arduino舵机控制系统的实验结果和讨论。
首先,介绍实验的设置和操作步骤。
然后,展示实验结果,包括舵机运动的准确性和控制精度等方面。
最后,对实验结果进行讨论,包括系统性能的评估和改进的建议。
结论本论文研究了Arduino舵机控制的原理、方法和实现,设计了基于Arduino的舵机控制系统,并通过实验验证了系统的可行性和性能。
结果表明,Arduino在舵机控制领域具有优势和应用潜力。
未来的工作可以进一步改进系统性能,并扩展到更广泛的舵机应用领域中。
继续写相关内容:第二章:舵机控制原理及方法2.1 舵机的工作原理舵机是一种能够精确控制角度位置的电机。
它由电机和位置反馈系统组成。
电机通过输出转矩来驱动舵盘转动,而位置反馈系统可以测量舵盘的实际位置,并将实际位置与目标位置进行比较,从而进行相应的修正。
2.2 传统的舵机控制方法传统的舵机控制方法主要包括PWM(Pulse Width Modulation)控制和位置控制。
Arduino入门到精通例程18-舵机控制
Arduino入门到精通例程18-舵机控制舵机控制实验舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。
其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20m,宽度为1.5m的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
经由电路板上的IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。
适用于那些需要角度不断变化并可以保持的控制系统。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
一般舵机旋转的角度范围是0度到180度。
舵机有很多规格,但所有的舵机都有外接三根线,分别用棕、红、橙三种颜色进行区分,由于舵机品牌不同,颜色也会有所差异,棕色为接地线,红色为电源正极线,橙色为信号线。
舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比来实现的,标准PWM(脉冲宽度调制)信号的周期固定为20m(50Hz),理论上脉宽分布应在1m到2m之间,但是,事实上脉宽可由0.5m到2.5m之间,脉宽和舵机的转角0°~180°相对应。
有一点值得注意的地方,由于舵机牌子不同,对于同一信号,不同牌子的舵机旋转的角度也会有所不同。
了解了基础知识以后我们就可以来学习控制一个舵机了,本实验所需要的元器件很少只需要舵机一个、跳线一扎就可以了。
RB—412舵机某1面包板跳线某1扎用Arduino控制舵机的方法有两种,一种是通过Arduino的普通数字传感器接口产生占空比不同的方波,模拟产生PWM信号进行舵机定位,第二种是直接利用Arduino自带的Servo函数进行舵机的控制,这种控制方法的优点在于程序编写,缺点是只能控制2路舵机,因为Arduino自带函数只能利用数字9、10接口。
Arduino的驱动能力有限,所以当需要控制1个以上的舵机时需要外接电源。
arduino 舵机控制

arduino 舵机控制章节一:引言(约200字)舵机是一种常用的电动装置,广泛应用于机器人、智能家居以及航模等领域,能够实现精确的位置控制。
随着互联网的快速发展,舵机的应用越来越受到重视。
本论文将讨论如何使用Arduino控制舵机,并介绍舵机的工作原理及其在实际应用中的作用。
章节二:舵机的工作原理与控制方式(约300字)舵机由电机、减速器和位置反馈器组成。
当输入电压变化时,电机内部的驱动电路会根据控制信号的占空比来控制电机转动的角度,从而实现位置控制。
舵机的控制方式有PWM控制、串口控制和无线控制等。
其中,PWM控制是最常用和最简单的方式,Arduino可以通过输出PWM信号来控制舵机的角度。
章节三:Arduino舵机控制实现(约300字)为了实现舵机的控制,首先需要连接舵机和Arduino。
舵机通常有三根线,其中一根连接到GND,另外两根分别连接到Arduino的数字输出引脚和5V引脚。
然后,通过Arduino的编程软件,使用analogWrite函数来输出PWM信号,其中的参数可以控制舵机转动的角度。
通过调整参数,可以控制舵机的转动幅度和速度。
章节四:应用案例与展望(约200字)舵机的应用非常广泛,可以用于机器人的运动控制、摄像头的云台控制以及自动化设备的位置调整等。
未来,随着物联网和人工智能的发展,舵机的应用将会越来越多样化和智能化。
例如,可以将舵机与传感器相结合,实现智能家居的远程控制和快速反馈。
此外,舵机的节能性和精确性还有待进一步研究和改进,以满足不同场景和需求的要求。
总结:本论文介绍了Arduino舵机控制的原理和方法,以及其在实际应用中的潜在价值。
通过Arduino的编程软件和适当的连接,我们可以轻松地控制舵机的角度和转动速度。
未来,舵机有望在智能化领域发挥更广泛的作用,为人们带来更多便利和创新。
章节一:引言(约200字)舵机是一种常用的电动装置,广泛应用于机器人、智能家居以及航模等领域,能够实现精确的位置控制。
如何使用Arduino舵机库servo.h–八色木

如何使用Arduino舵机库servo.h–八色木文章目录[隐藏]•Servo.ho Servo库文件使用我们都知道Arduino控制板支持PWM的引脚有限,但如果在Arduino上需要控制超出PWM引脚数量的舵机怎么办呢?答案是使用servo.h库文件,它是Arduino控制舵机的标准库之一。
Servo.h查看Arduino库文件列表,可通过Arduino IDE的“Help”菜单下的“Reference”查看。
Arduino Libraries我们可以看到在Arduino标准库中的servo库,单击连接后进入,可查看servo.h文件更详细的内容。
Servo library在上图左边是对servo库文件的基本介绍,右边是主要的函数和示例。
Servo库文件使用我们知道舵机必须定期接收高电平脉冲控制信号才能维持转动。
如果信号停止,舵机也停止。
详见:舵机角度的控制。
如果使用servo 库来设置控制信号,就可以通过引入一些代码,实现如延迟、检查传感器、等待等功能。
同时,由于servo库一直在后台运行,而舵机一直在旋转,它会经常中断其他正在执行的代码来启动那些高脉冲,带是这个切换的动作快到我们感知不到。
使用servo库来发送舵机控制信号一般需要四个步骤:1、首先要告诉Arduino编程器,希望在代码开始时,即setup 函数之前,声明使用Servo库函数。
#include <Servo.h> // Include servo library2、在#include和setup函数之间为要发送的信号命名servo库的实例。
如下servoLeft就是指定的实例名称。
Servo servoLeft; // Declare left servo3、在setup函数中,使用给出的舵机信号的名称后跟一个点,然后通过附加函数attach()调用信号引脚。
这个例子告诉系统舵机信号servoLeft应该通过数字引脚13来传输。
arduino控制舵机

arduino控制舵机章节一:引言(250字左右)在现代科技的快速发展下,许多机械设备需要精确而准确的运动控制。
舵机作为一种常见的位置控制装置,具有体积小、结构简单、响应速度快及可靠性高等优点,广泛应用于无人飞行器、机器人、自动门等领域。
然而,如何实现对舵机的精确控制一直是一个研究的热点。
本论文旨在探讨使用Arduino控制舵机的方法,并分析其在实际应用中的效果和限制。
章节二:Arduino控制舵机的方法(300字左右)Arduino是一种开源的单片机平台,具有强大的扩展性和易于使用的特点。
在控制舵机方面,我们可以通过连接Arduino与舵机驱动模块,利用PWM(脉宽调制)信号来控制舵机的角度。
Arduino的PWM输出引脚可以发出高频脉冲信号,通过调整脉冲的宽度,可以精确控制舵机的位置。
具体的步骤是:首先,将舵机连接到Arduino的PWM输出引脚上;然后,通过编程设置PWM引脚的信号占空比,从而控制舵机的角度。
章节三:Arduino控制舵机的实际应用(300字左右)将Arduino与舵机相结合,可以实现许多有趣的应用。
在无人飞行器中,舵机可以用来控制飞行器的方向和高度,从而实现稳定飞行;在机器人中,舵机可以用来控制机器人的手臂和腿部,实现精确的动作;在自动门中,舵机可以用来控制门的开关,实现自动开关。
通过合理的编程和硬件连接,Arduino可以实现对舵机的精确控制,使得这些设备更加智能和灵活。
章节四:Arduino控制舵机的局限性与展望(150字左右)虽然Arduino在控制舵机方面具有许多优势,但也存在一些局限性。
首先,Arduino的驱动能力有限,不能同时控制大量的舵机。
其次,控制精度受到Arduino的位数和频率的限制。
此外,对于较精确的控制需求,可能需要使用更复杂的控制算法和更强大的硬件。
展望未来,可以结合其他控制器和传感器,进一步提高舵机控制的精确性和灵活性,实现更多高级功能的开发。
arduino控制多个舵机

arduino控制多个舵机第一章:引言(约200字)随着机器人技术的快速发展,舵机被广泛应用于各种机械臂、无人机和人形机器人等设备中。
舵机可以精确控制机械臂、无人机等设备的运动,使其具有更高的灵活性和精准度。
然而,要控制多个舵机需要解决的问题是如何实现多个舵机的协调运动,以及如何有效地控制多个舵机同时运行。
因此,本论文旨在研究如何利用Arduino控制系统来实现对多个舵机的灵活控制。
第二章:相关技术(约300字)2.1 舵机工作原理舵机是一种将电信号转换成机械运动的设备,通过控制器发送的脉冲信号的宽度来控制舵机的角度,因此,舵机可以根据控制信号的大小精确地控制机械臂的运动。
2.2 Arduino控制系统Arduino是一种便捷灵活、开源的电子原型平台,在机器人领域被广泛应用。
Arduino可以通过编程语言控制舵机的运动,实现对舵机的精确控制。
2.3 舵机控制算法常见的舵机控制算法有位置式控制算法和速度式控制算法。
位置式控制算法通过控制输出的脉冲信号的宽度来精确控制舵机的角度。
速度式控制算法通过计算舵机的角度和时间间隔之间的差值来控制舵机的速度。
第三章:多舵机控制系统设计(约300字)3.1 硬件设计本系统采用Arduino UNO作为控制器,通过串口与计算机进行通信。
同时,根据需要控制的舵机数量选择合适的舵机拓展板,连接多个舵机。
3.2 软件设计通过编程实现Arduino控制系统的功能,首先需要配置串口通信,然后根据需要控制的舵机数量,设置对应的舵机引脚,并编写相应的控制算法来实现对多个舵机的控制。
第四章:实验结果与分析(约200字)4.1 实验设置为了验证本设计的课题的可行性,我们制作了一个机械臂模型,模型上装有多个舵机,利用设计的Arduino控制系统对其进行控制。
4.2 实验结果实验结果表明,通过设计的Arduino控制系统可以实现对多个舵机的精确控制。
舵机的角度能够达到预期的期望值,并且不同舵机之间的协调运动也能够实现。
舵机扑翼arduino代码

舵机扑翼arduino代码舵机扑翼是一种常见的控制舵机运动的方法,它通过改变舵机的角度来实现不同方向和速度的运动。
在Arduino中,我们可以使用一些简单的代码来控制舵机的扑翼运动。
下面我将为您提供一个全面详细的回答。
## 1. 硬件准备在编写舵机扑翼的Arduino代码之前,我们首先需要准备以下硬件:- Arduino开发板- 舵机- 杜邦线## 2. 连接电路将舵机的信号线连接到Arduino开发板上。
信号线连接到Arduino开发板上任意一个数字引脚,这里我们假设使用数字引脚9。
## 3. 编写代码打开Arduino IDE,并创建一个新的空白项目。
然后按照以下步骤编写代码:### 3.1 引入库文件在代码开始部分,我们需要引入Servo库文件,这样才能使用内置的Servo函数来控制舵机。
```c++#include <Servo.h>```### 3.2 定义舵机对象接下来,在全局范围内定义一个Servo对象,以便于后续对舵机进行控制。
```c++Servo servo;```### 3.3 设置初始参数在setup()函数中设置初始参数,包括舵机连接的引脚和舵机的初始位置。
这里我们将舵机连接到数字引脚9,并将初始位置设置为90度。
```c++void setup() {servo.attach(9);servo.write(90);}```### 3.4 控制舵机运动在loop()函数中,我们可以编写代码来控制舵机的运动。
这里我们以扑翼运动为例,实现舵机在两个角度之间来回扑翼。
```c++void loop() {// 设置起始角度和结束角度int startAngle = 45;int endAngle = 135;// 执行扑翼运动for (int angle = startAngle; angle <= endAngle; angle++) {servo.write(angle);delay(10); // 可根据需要调整延迟时间,控制扑翼速度}for (int angle = endAngle; angle >= startAngle; angle--) {servo.write(angle);delay(10); // 可根据需要调整延迟时间,控制扑翼速度}}```## 4. 烧录代码并测试完成代码编写后,将Arduino开发板连接到电脑上,并选择正确的开发板和端口。
arduino控制舵机正反转

arduino控制舵机正反转章节一:引言竞速模型车是一个非常受欢迎的娱乐项目。
为了提高竞赛中的表现,人们常常使用舵机来控制车辆的转向。
本篇论文将介绍如何使用Arduino控制舵机的正反转。
首先,我们将介绍舵机的工作原理和基本结构。
然后,我们将讨论Arduino的使用,并介绍如何连接舵机到Arduino板上。
接下来,我们将详细说明如何通过改变舵机的PWM信号来控制舵机的转向。
最后,我们将总结本文,并给出未来研究的建议。
章节二:舵机的工作原理和基本结构舵机是一种用于控制转动的装置。
它由电机、控制电路和反馈机构组成。
舵机的转动角度由输入的控制信号控制。
舵机通常由直流电机驱动,通过传感器获得反馈信号,然后由控制电路将输入信号转化为电流或电压,驱动电机转动。
舵机的基本结构包括电机、减速装置和位置反馈装置。
电机负责驱动舵盘进行转动,减速装置将电机的高速旋转转换为较慢的舵盘转动速度,位置反馈装置用于检测舵盘的转动角度。
章节三:使用Arduino控制舵机Arduino是一种开源电子原型平台,可以轻松编程和控制各种电子设备。
我们可以使用Arduino来控制舵机的正反转。
首先,我们需要将舵机连接到Arduino板上。
舵机通常有三个线,分别是电源线、地线和控制线。
电源线用于提供电源,地线用于接地,控制线用于接收控制信号。
我们需要将舵机的电源线连接到Arduino板上的5V引脚,地线连接到GND引脚,控制线连接到数字引脚。
然后,我们需要编写Arduino代码来控制舵机的正反转。
我们可以使用Arduino的PWM功能来生成控制信号。
PWM信号是一种周期性的脉冲信号,通过改变脉冲的宽度来改变信号的占空比,即改变控制信号的幅度。
通过改变占空比,可以控制舵机的转动角度。
章节四:总结与展望本文介绍了如何使用Arduino控制舵机的正反转。
首先,我们介绍了舵机的工作原理和基本结构。
然后,我们详细说明了如何将舵机连接到Arduino板上,并使用Arduino的PWM功能来生成控制信号。
arduino 超声波控制舵机连接方法
arduino 超声波控制舵机连接方法在连接Arduino超声波模块和舵机时,可以参考以下步骤:1. 准备材料:Arduino板、HC-SR04超声波模块、舵机。
2. 连接超声波模块:将超声波模块的“VCC”连接到Arduino板的5V,“GND”连接到Arduino板的GND,“trigPin”连接到Arduino板的D11,“echoPin”连接到Arduino板的D12。
3. 连接舵机:使用舵机的三根线连接到Arduino板,通常分别为“+5V”(连接到Arduino的5V),“GND”(连接到Arduino的GND),以及信号线(接到Arduino的任意一个数字引脚,例如D2)。
4. 编写代码:在Arduino IDE中编写代码,以控制舵机的旋转角度。
以下是一个简单的示例代码,用于控制舵机旋转90度:```c++include <>Servo myservo; // 创建一个舵机对象void setup() {(2); // 将舵机信号线连接到数字引脚2}void loop() {(90); // 控制舵机旋转90度delay(1000); // 等待1秒钟}```5. 上传代码:将代码上传到Arduino板,然后观察舵机的旋转情况。
如果需要调整舵机的旋转角度,可以修改代码中的角度值。
6. 调试:如果舵机无法正常工作,可以检查连接线是否牢固,以及代码是否有误。
如果问题仍然存在,可以查阅相关资料或寻求专业人士的帮助。
请注意,以上步骤仅是参考,具体的连接方法可能会因项目需求、电路设计、设备型号等因素而有所不同。
在连接过程中,请务必遵循安全规范,避免短路、过载等危险情况。
arduino舵机控制程序
arduino舵机控制程序第一章:导论(约200字)引言:控制舵机是机电控制和嵌入式系统设计中常见的任务。
舵机可以帮助机器人或其他设备进行精确的位置控制和运动控制。
本论文将介绍如何使用Arduino控制舵机,并提供详细的控制程序以及实际应用案例。
研究背景:随着科技的不断发展,使用舵机进行精准控制的需求逐渐增加。
然而,如何使用Arduino控制舵机这一问题一直没有详尽的研究。
因此,本论文的目的是为使用Arduino控制舵机的研究提供一种有效的方法和程序。
研究目标:本论文的目标是设计一个简单实用的Arduino舵机控制程序,使用户能够快速上手并掌握控制舵机的基本知识和技巧。
同时,通过实际应用案例的介绍,展示舵机在机器人和嵌入式系统中的潜力和应用前景。
研究方法:本论文将基于Arduino开发环境进行实验。
首先,我们将介绍舵机的工作原理和基本控制方法。
然后,我们将详细介绍使用Arduino控制舵机的步骤和程序。
最后,我们将通过实际案例来验证舵机控制程序的可行性和有效性。
第二章:舵机的基本原理和控制方法(约300字)本章将介绍舵机的基本原理和控制方法。
首先,我们将介绍舵机的构造和工作原理,包括舵机的电机、位置反馈装置和控制电路。
然后,我们将介绍舵机的控制方法,包括位置控制和速度控制。
最后,我们将详细介绍如何通过PWM信号控制舵机的旋转角度和速度。
第三章:Arduino舵机控制程序(约400字)本章将详细介绍使用Arduino控制舵机的步骤和程序。
首先,我们将介绍如何连接舵机到Arduino开发板,并说明电路图和连接方法。
然后,我们将介绍如何编写Arduino舵机控制程序,包括引入舵机库、设置舵机引脚、初始化舵机、控制舵机旋转角度等。
最后,我们将给出一些调试技巧和注意事项,帮助用户在实际操作中避免常见的错误。
第四章:实际应用案例(约300字)本章将通过实际应用案例来展示舵机的潜力和应用前景。
我们将选取一个具体的机器人或嵌入式系统项目,说明如何使用Arduino控制舵机实现相关功能,如机器人手臂的精确控制、摄像机云台的旋转控制等。
arduino入门实践之舵机的控制

arduino⼊门实践之舵机的控制元件:arduino mega 2560、舵机、杜邦线接线:普通舵机有3根线:棕、红、橙(棕⾊连接 GND、红⾊连接 Vcc、橙⾊连接信号 S)原理:舵机的伺服系统由可变宽度的脉冲来进⾏控制,控制线是⽤来传送脉冲的。
脉冲的参数有最⼩值,最⼤值,和频率。
⼀般⽽⾔,舵机的基准信号都是周期为20ms,宽度为1.5ms。
这个基准信号定义的位置为中间位置。
舵机有最⼤转动⾓度,中间位置的定义就是从这个位置到最⼤⾓度与最⼩⾓度的量完全⼀样。
最重要的⼀点是,不同舵机的最⼤转动⾓度可能不相同,但是其中间位置的脉冲宽度是⼀定的,那就是1.5ms。
如下图: ⾓度是由来⾃控制线的持续的脉冲所产⽣。
这种控制⽅法叫做脉冲调制。
脉冲的长短决定舵机转动多⼤⾓度。
例如:1.5毫秒脉冲会到转动到中间位置(对于180°舵机来说,就是90°位置)。
当控制系统发出指令,让舵机移动到某⼀位置,并让他保持这个⾓度,这时外⼒的影响不会让他⾓度产⽣变化,但是这个是由上限的,上限就是他的最⼤扭⼒。
除⾮控制系统不停的发出脉冲稳定舵机的⾓度,舵机的⾓度不会⼀直不变。
当舵机接收到⼀个⼩于1.5ms的脉冲,输出轴会以中间位置为标准,逆时针旋转⼀定⾓度。
接收到的脉冲⼤于1.5ms情况相反。
不同品牌,甚⾄同⼀品牌的不同舵机,都会有不同的最⼤值和最⼩值。
⼀般⽽⾔,最⼩脉冲为1ms,最⼤脉冲为2ms。
如下图:arduino控制舵机的两种⽅法: 1、第⼀种是通过Arduino的普通数字传感器接⼝产⽣占空⽐不同的⽅波,模拟产⽣PWM信号进⾏舵机定位。
2、第⼆种是直接利⽤Arduino⾃带的Servo函数进⾏舵机的控制,这种控制⽅法的优点在于程序编写,缺点是只能控制2路舵机,因为Arduino⾃带函数只能利⽤数字9、10接⼝。
Arduino的驱动能⼒有限,所以当需要控制1个以上的舵机时需要外接电源。
代码:#include<Servo.h>Servo myservo; //建⽴⼀个舵机对象myservoint pos = 0;void setup() {myservo.attach(9); //将引脚9上的舵机与舵机对象连接起来}void loop() {for(pos = 0;pos<180;pos += 1) //若要控制增⼤转动速度,可将1改为更⼤的数值{myservo.write(pos); //写⾓度到舵机delay(15);}for(pos = 180;pos>=1;pos-=1){myservo.write(pos);delay(15);}}。
利用Arduino 驱动舵机(附带程序)
学习利用Arduino 驱动舵机(附带程序)2012-6-30 00:27|发布者: sonxun|查看: 1180|评论: 0摘要: 什么是伺服电机?想象一下有一个小电机连接到一个可调电阻器。
一个电动脉冲或者命令被发送到电机之后,电机旋转到匹配指定的电位值的角度。
嗯,那样说听起来有点难以理解。
一个更简单的解释是:伺服电机,就是一个可 ... 什么是伺服电机?想象一下有一个小电机连接到一个可调电阻器。
一个电动脉冲或者命令被发送到电机之后,电机旋转到匹配指定的电位值的角度。
嗯,那样说听起来有点难以理解。
一个更简单的解释是:伺服电机,就是一个可以被指定旋转到一个特定的角度的电动马达。
例如,它通常可以用来控制遥控汽车的转向系统。
在这里,我们要再次感谢Arduino和朋友们,要使用一个伺服电机是很容易的,它可以让你创造出富有想象力的设计,唯一的局限就只有你的时间和资金了。
当你想要使用伺服电机时,需要考虑一些因素,包括:•旋转范围,指的是电机可以旋转的角度的范围。
例如 180 度或者 360 度(全旋),等等。
•旋转速度(通常以旋转每一度所花费的时间来衡量)。
•扭矩,伺服电机能够产生的扭矩 (旋转的力量)。
•在负载的状态下的电流大小。
•重量、成本以及其他因素。
脑海中首先想到的一个问题就是“哇——我能够同时使用多少个电机呢?”答案是……在duemilanove上,可以使用12个;在arduino mega上,可以使用48 个(哇)。
请注意当你使用伺服电机函数库时,你不能在第9和第10端口上使用analogWrite(); 函数。
你可以在 arduino 伺服电机函数库页面找到更多的细节。
在今天的例子和练习中,我使用了Turnigy TG9伺服电机。
它相当的便宜,而且重量轻,非常适合演示实验,这款电机也经常被用于遥控飞机。
它的旋转范围是180度。
(它真的非常便宜)我希望你注意到伺服电机上一共有三根导线。
一根是 +5V 电源,一根是 GND 接地,另一根是控制信号——连接到arduino的一个数字输出端口上。
arduino 多个舵机控制
arduino 多个舵机控制章节一:引言在现代科技领域中,越来越多的项目需要使用到舵机来实现精确的运动控制。
然而,传统的舵机控制方法往往只能控制一个舵机的运动,而当需要控制多个舵机同时运动时,往往会面临诸多问题。
为了解决这一难题,本文将介绍如何通过Arduino 控制多个舵机的运动,从而实现对多个舵机的精确控制。
章节二:舵机控制基础在介绍多舵机控制之前,首先需要了解舵机的基础知识。
舵机是一种用于控制机械装置运动的电机,它具有位置反馈和角度控制功能。
舵机通常由一个电机、一个控制电路和一个反馈装置构成。
舵机通过电路中的脉冲宽度调制(PWM)信号来控制舵机的角度,通常使用50Hz的PWM信号,脉冲宽度的变化范围可决定舵机的角度范围。
章节三:多舵机控制方案设计本文采用的多舵机控制方案是使用Arduino来实现,因为Arduino具有开源、易使用和丰富的资源的特点。
在实际应用中,为了同时控制多个舵机,我们需要使用到一种称为舵机驱动板(Servo Driver Board)的外部硬件模块。
舵机驱动板通过I2C总线与Arduino连接,可以同时控制多个舵机的运动。
章节四:实验与结果分析在实际实验中,我们使用了Arduino UNO、舵机驱动板和四个舵机。
通过编写Arduino程序,我们可以通过I2C总线将多个舵机连接到舵机驱动板上,然后通过在程序中指定舵机的编号和对应的角度,来控制多个舵机的运动。
在实验过程中,我们可以观察到每个舵机的运动是否符合预期,从而验证我们的多舵机控制方案的有效性。
总结:本文介绍了如何利用Arduino实现对多个舵机的控制,通过使用舵机驱动板和编写相应的Arduino程序,我们可以实现对多个舵机的精确控制。
通过实验和结果分析,我们可以验证多舵机控制方案的有效性和实用性。
未来,可以进一步研究舵机控制方案的优化和应用扩展,在更广泛的领域中提供更多的可能性。
章节三:多舵机控制方案设计本文采用的多舵机控制方案是使用Arduino来实现,因为Arduino具有开源、易使用和丰富的资源的特点。
arduino 控制舵机

arduino 控制舵机章节一:引言 (大约250字)本论文旨在介绍如何使用Arduino控制舵机,这在机器人技术、自动化领域以及其他各种应用中具有重要作用。
舵机是一种能够精确控制角度的设备,通常用于控制机器人的各个部件,如机械臂、摄像头等。
Arduino是一种开源电子平台,提供了简单、易用的方式来控制各种外围设备。
本文将介绍如何使用Arduino进行舵机控制,并给出了一些实例来演示其应用。
章节二:舵机的控制机制 (大约250字)舵机通过控制脉冲宽度调制(PWM)信号来实现角度控制。
通常情况下,舵机接收一个20ms的周期信号,其中高电平部分的宽度决定了舵机的位置。
通过改变高电平部分的宽度,我们可以控制舵机的角度。
Arduino通过PWM输出引脚来实现这个功能。
我们可以使用Arduino的analogWrite()函数来生成PWM信号,并将舵机连接到相应的引脚上。
章节三:Arduino控制舵机的实现 (大约250字)在Arduino中,我们可以使用Servo库来控制舵机。
首先,我们需要引入Servo库并创建一个Servo对象。
然后,我们可以使用attach()函数将舵机连接到一个特定的引脚上。
接下来,我们可以使用write()函数来设置舵机的角度。
通过不断改变角度值,我们可以控制舵机的运动。
最后,我们可以使用detach()函数将舵机从引脚上解除连接。
本文将给出一个简单的示例程序,展示如何使用Arduino控制舵机。
我们将创建一个简单的舵机摆动程序,让舵机在两个预定的角度之间来回摆动。
章节四:实验结果与讨论 (大约250字)我们将使用Arduino Uno开发板和一个舵机来进行实验。
通过运行我们编写的程序,我们成功地将舵机连接到Arduino,并实现了一个简单的舵机摆动功能。
我们通过改变角度值和摆动的时间间隔,观察到了舵机运动的不同效果。
总之,本文介绍了如何使用Arduino控制舵机,并给出了一个简单的示例程序。
舵机扑翼arduino代码

舵机扑翼Arduino代码简介舵机扑翼是一种机械装置,模仿鸟类或昆虫的翅膀扇动的动作。
通过使用Arduino 控制舵机的旋转角度和速度,我们可以实现一个模拟飞行的机器人。
本文将详细介绍关于舵机扑翼的Arduino代码,包括如何连接舵机到Arduino、编写舵机控制代码,并提供一个简单的实例来演示代码的工作原理。
材料清单在开始编写代码之前,我们需要准备以下材料: - Arduino开发板 - 一个舵机 - 杜邦线(若干)连接舵机到Arduino首先,我们需要将舵机连接到Arduino开发板上。
舵机通常具有三个引脚:地(GND)、电源(VCC)和控制信号(信号)。
1.将舵机的地引脚连接到Arduino的地引脚。
2.将舵机的电源引脚连接到Arduino的5V引脚。
3.将舵机的控制信号引脚连接到Arduino的数字引脚。
确保引脚连接正确,然后我们可以开始编写代码。
编写舵机控制代码在Arduino中,我们可以使用Servo库来控制舵机。
首先,我们需要在代码中包含Servo库。
#include <Servo.h>接下来,我们需要定义一个舵机对象,并指定控制信号引脚。
Servo myServo;void setup() {myServo.attach(9); // 将舵机控制信号引脚连接到Arduino的数字引脚 9}在setup()函数中,我们使用attach()函数将舵机的控制信号引脚连接到Arduino的数字引脚,在本例中我们连接到数字引脚 9。
现在,我们可以编写一个简单的函数来控制舵机的旋转角度。
void flapWings() {myServo.write(0); // 将舵机旋转到 0 度位置,扇动向下delay(1000); // 等待 1 秒myServo.write(90); // 将舵机旋转到 90 度位置,扇动向上delay(1000); // 等待 1 秒}在flapWings()函数中,我们使用write()函数将舵机旋转到指定的角度。
arduino机械 控制舵机正反转

arduino 控制舵机正反转Chapter 1: IntroductionIntroduction:The aim of this thesis is to explore the implementation of Arduino in controlling the rotation direction of a servo motor. Arduino is an open-source electronic platform that allows users to create interactive projects. Servo motors are widely used in various applications such as robotics, automation, and model making due to their precise control over rotational motion. This paper will discuss the principles behind servo motor control, the electrical setup required, and the programming techniques used for controlling servo motor rotation direction.Chapter 2: Servo Motor Control Principles2.1 Working Principle of Servo Motors:A servo motor is a closed-loop feedback control system that converts an electrical signal into rotational motion. It consists of a motor, a position sensor (usually a potentiometer), and a control circuit. The control circuit compares the desired position with the actual position of the motor shaft and adjusts its rotation accordingly.2.2 Controlling Servo Motor Direction:The direction of a servo motor's rotation is controlled by the polarity of the electrical signal supplied to it. By reversing the polarity, the servo motor can be made to rotate in the opposite direction. Arduino can generate these electrical signals using its pulse-width modulation (PWM) pins. By varying the pulse width,the servo motor can be controlled to rotate at different angles and speeds.Chapter 3: Electrical Setup3.1 Hardware Requirements:To control the direction of a servo motor using Arduino, the following components are required:- Arduino board- Servo motor- Jumper wires- Power supply (usually 5V)3.2 Wiring Connections:The servo motor is connected to the Arduino board as follows: - Connect the servo motor's positive pin to the Arduino's 5V pin - Connect the servo motor's ground pin to the Arduino's GND pin - Connect the servo motor's control pin to one of the Arduino's PWM pins (e.g., pin 9)Chapter 4: Arduino Programming Techniques4.1 Arduino Library for Servo Motor Control:Arduino provides a built-in servo library that simplifies the programming of servo motor control. This library provides functions such as attach(), write(), and writeMicroseconds() to control the servo motor's rotation angle.4.2 Code Example: Controlling Servo Motor Direction:To control the direction of the servo motor using Arduino, thefollowing code snippet can be used:#include <Servo.h>Servo myServo;void setup() {myServo.attach(9); // Attaches the servo to pin 9}void loop() {// Rotate the servo clockwisemyServo.write(0); // Set the angle to 0 degreesdelay(2000); // Wait for 2 seconds// Rotate the servo counterclockwisemyServo.write(180); // Set the angle to 180 degreesdelay(2000); // Wait for 2 seconds}Conclusion:In this thesis, we have discussed the principles behind servo motor control and demonstrated how Arduino can be used to control the rotation direction of a servo motor. By leveraging Arduino's PWM pins and servo library, users can easily program the servo motor to rotate clockwise and counterclockwise. The electrical setup requires the proper wiring connections between the servo motor and Arduino, along with an appropriate power supply. Overall,Arduino provides a versatile and accessible platform for controlling servo motor rotation direction.Chapter 5: Challenges and Limitations5.1 Power Supply:One challenge in controlling servo motor direction is ensuring a stable and adequate power supply. Servo motors typically require a separate power source, as they can draw a substantial amount of current. It is important to provide a steady and sufficient power supply to avoid fluctuations or voltage drops that may affect the motor's performance or cause it to malfunction.5.2 Mechanical Constraints:The direction of rotation in a servo motor is also influenced by its mechanical setup. Some servo motors have limited rotation angles, typically 180 degrees or 360 degrees. The servo motor's physical structure and design may impose constraints on the possible rotation directions, limiting the range of motion or requiring additional mechanical adjustments.5.3 Accuracy and Precision:Controlling the direction of rotation in a servo motor requires precise and accurate control signals. The position sensor in the motor provides feedback to the control circuit, enabling it to adjust the motor's rotation accordingly. However, there may be limitations in the accuracy and precision of the position sensor, leading to slight errors or inaccuracies in the motor's actual rotation direction.Chapter 6: Applications of Servo Motor Control6.1 Robotics:Servo motors are widely used in robotics for controlling joint movements. By accurately controlling the rotation direction of each servo motor, robots can perform various tasks with dexterity and precision. For example, robotic arms can be controlled to pick and place objects, while humanoid robots can simulate human-like movements.6.2 Automation:Servo motors play a crucial role in automation systems, where precise control over motion is necessary. They are used in conveyor systems, CNC machines, and industrial assembly lines to control the movement of components or tools. By controlling the rotation direction of servo motors, automation systems can achieve efficient and accurate motion control.6.3 Model Making:In the field of model making, servo motors are extensively used to control the movement of model vehicles, aircraft, and ships. By programming the servo motors to rotate in different directions, model makers can create realistic and interactive models. For example, in an RC car, servo motors control the steering mechanism.Conclusion:Controlling the rotation direction of a servo motor using Arduino provides a versatile and accessible platform for various applications. By leveraging Arduino's PWM pins and servo library,users can easily program the servo motor to rotate clockwise or counterclockwise. However, challenges such as power supply requirements, mechanical constraints, and accuracy limitations need to be considered. Despite these challenges, servo motor control finds applications in robotics, automation, and model making, enabling precise and controlled motion. With further advancements in technology and improvements in servo motor designs, the implementation of Arduino in controlling servo motor direction will only become more efficient and effective.。
Arduino扩展板使用之舵机篇
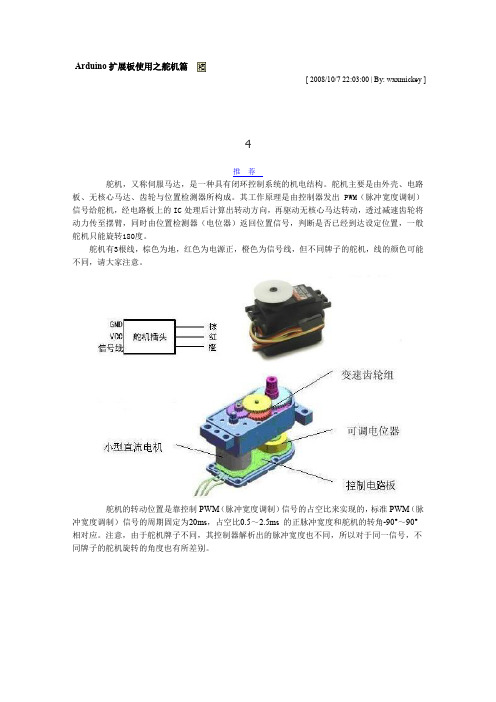
Arduino 0012-0016版本的 IDE 内会自带一个舵机库文件,不过该库文件只能使 Pin9和 Pin10控制 舵机,如舵机连接到 Pin9上:
演示代码:
#i nclude <Servo.h>
Servo myservo; // 定义舵机对象,
int pos = 0;
void setup()
break;
case 'a':
//如果数据后带 a,则表示是 servo1的数据,比如串口发送85a
servo1.write(v);
v = 0;
break;
case 'b':
//如果数据后带 b,则表示是 servo2的数据,比如串口发送90b
servo2.write(v);
v = 0;
break;
B:数字扩展口,插针定义从上至下为:数字 IO 口,5V,地(符合舵机线序)。 C:串口选择跳线,当需要使用 RS485功能时,3个短路帽插到上面;当需要使用 APC220无 线数传时,3个短路帽插到下面;当需要下载程序时,请拔掉短路帽。 D:RS485串口接口,C 串口选择跳3个短路帽插到上面时有效。 E:模拟扩展口,插针定义从上至下为:5V,地,数字 IO 口(符合 GP2D12线序)。 F:复位按钮。 G:5个 VIN 电源口,与 Arduino 的 VIN 相通。 H:电源指示灯。 I:APC220无线数传接口,C 串口选择跳3个短路帽插到下面时有效。 J:6个 PWM 接口,将数字口上的6个 PWM 单独引出来,插针定义从上至下为:PWM,地, 5V。 K:大电流器件独立电源接口,当接入电源时,请拔掉 A 跳线短路帽。
aduino按键控制舵机

aduino按键控制舵机一、引言Arduino 是一种开源的电子平台,它以简洁的编程语言和易用的开发工具,被广泛应用于各种创意项目和原型制作中。
舵机是一种能够控制角度的电动装置,可实现精确的运动控制。
本论文旨在研究如何使用 Arduino 板和按键来控制舵机的运动。
二、原理1. Arduino 板和舵机的连接通过连接杜邦线,将舵机的地线连接至 Arduino 板的 GND (地)脚。
然后,将舵机的电源线连接至 Arduino 板的 5V (电源)脚。
最后,将舵机的控制线连接至 Arduino 板的数字引脚。
2. 按键的接口设置将按键的引脚接入 Arduino 板的数字引脚,并设置相应的引脚为输入模式。
3. 舵机的控制原理舵机通过控制信号的脉冲宽度来控制角度位置。
当脉冲宽度为0时,舵机转到最左边的位置;当脉冲宽度为180时,舵机转到最右边的位置。
在 Arduino 编程中,可以使用 Servo 库来控制舵机的转动。
三、方法1. 初始化程序在 Arduino IDE 中编写程序,导入 Servo 库并定义控制舵机的引脚。
2. 编写按键控制程序通过使用 digitalRead() 函数来读取按键的状态,当按键按下时,控制舵机转动到指定角度。
3. 编译和上传程序将编写好的程序通过 USB 线连接 Arduino 板,并编译上传到Arduino 板上运行。
四、实验结果与分析通过实验可以发现,按键控制舵机的运动是很简单且精确的。
当按键按下时,舵机会转动到相应的角度位置;当按键松开时,舵机保持在当前角度位置。
这种按键控制舵机的方式可以应用于很多实际场景中,如机械臂、门禁系统等。
实验中还可以根据需求进一步优化程序,例如添加限位功能,防止舵机过度转动,并通过串口打印当前舵机角度,方便进行调试和监控。
总结:本实验成功实现了使用 Arduino 板和按键来控制舵机的目标。
通过按键可以精确地控制舵机的转动,实现了精准的角度控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
arduino控制舵机程序
第一章:引言
随着科技的发展,舵机作为一种常见的传感器设备,广泛应用于机器人控制、航模模型等领域。
舵机可以通过控制信号的输入来实现角度的控制,具有定位精度高、响应速度快等特点。
然而,传统的舵机控制方式存在一定的局限性,例如控制精度不够高、功能扩展能力较弱等问题。
为此,本论文借助Arduino开发板,研究了一种基于Arduino控制的舵机程序,旨在提高舵机控制的精度和功能扩展能力。
第二章:相关技术
2.1 Arduino开发板
Arduino是一款开源的单片机开发平台,具有简单易学的编程语言和丰富的外设接口。
它可以通过编程实现与舵机的通信和控制。
2.2 舵机控制原理
舵机的控制主要依靠控制信号的脉冲宽度来实现,通常使用PWM信号传输。
通过改变脉冲的高电平时间,可以改变舵机的角度。
第三章:舵机程序设计
3.1 硬件连接
将舵机的控制线连接到Arduino开发板的数字输出口,将舵机的电源线接到Arduino开发板的电源供应器上,以确保舵机正常工作。
3.2 编程设计
使用Arduino的开发平台进行编程设计,首先进行引入舵机库的操作,然后定义舵机控制信号的引脚。
在主程序中,可以通过调用库函数来实现舵机控制的功能,例如设置舵机角度、使舵机旋转到指定的角度等。
3.3 程序优化
为了提高舵机控制的精度和稳定性,可以通过优化程序代码来减小误差和延迟。
例如可以设置适当的控制信号周期、增加控制信号的分辨率等。
第四章:系统实验与结果分析
为了验证舵机程序的控制效果,本论文设计了一系列实验。
实验结果表明,基于Arduino的舵机程序能够实现精确的舵机控制,并且具有较好的功能扩展能力。
通过修改程序代码,可以实现多个舵机的同步控制、快速响应等功能。
综上所述,本论文研究了基于Arduino控制的舵机程序。
实验
结果表明,该程序能够实现精确的舵机控制,具有较好的功能扩展能力。
未来可以进一步优化程序算法,提高舵机控制的性能。
第一章:引言
随着科技的快速发展,舵机作为一种常见的传感器设备,被广泛应用于机器人控制、航模模型、智能家居等领域。
舵机的角度控制精度高、响应速度快,因此在各种应用中起着至关重要的作用。
然而,传统的舵机控制方式存在一定的局限性,例如控制精度有限、扩展能力弱等问题。
为了解决这些问题,本论文针对舵机控制提出了一种基于Arduino开发板的舵机控制程序。
第二章:相关技术
2.1 Arduino开发板
Arduino是一款开源的单片机开发平台,具有简单易学的编程
语言和丰富的外设接口。
Arduino开发板可通过编程实现与舵
机的通信和控制,具有开发灵活、硬件接口丰富的优势。
2.2 舵机工作原理
舵机通过接收控制信号来调整自身的位置,从而实现角度控制。
舵机控制信号通常采用PWM脉冲宽度调制的方式进行传输。
调节脉冲宽度的高电平时间,可以改变舵机的角度。
第三章:舵机程序设计
3.1 硬件连接
将舵机的控制线连接到Arduino开发板上的数字输出引脚,确
保舵机能够正常接收控制信号。
同时,将舵机的电源线连接到Arduino开发板的电源供应器上。
3.2 编程设计
通过Arduino的开发平台进行编程设计,首先需要引入舵机库,以便使用库函数来实现舵机控制。
然后,定义舵机控制信号的引脚。
在主程序中,可以通过调用库函数来实现舵机控制的各种功能,例如设置舵机角度、使舵机旋转到指定角度等。
3.3 程序优化
为了提高舵机控制的精度和稳定性,可以进行程序优化。
例如,设定适当的控制信号周期,增加控制信号的分辨率,以减小误差和延迟。
同时,根据具体应用需求,进行适当的算法调优,提高舵机的控制响应速度。
第四章:系统实验与结果分析
为了验证舵机程序的控制效果,本论文进行了一系列实验。
实验结果表明,基于Arduino控制的舵机程序能够实现精确的舵
机控制,并具有较好的功能扩展能力。
通过修改程序代码,还可以实现多个舵机的同步控制、快速响应等功能。
综上所述,本论文研究了基于Arduino控制的舵机程序。
实验结果验证了该程序的稳定性和精确性。
未来,可以进一步优化程序算法,提高舵机控制的性能,以满足更广泛的应用需求。
同时,还可以将舵机与其他传感器、设备结合,实现更复杂的控制任务,推动舵机技术的进一步发展。