foc 高频注入算法
关于无刷电机FOC驱动算法的研究_v6-毕业论文

---文档均为word文档,下载后可直接编辑使用亦可打印---摘要近些年来,高新技术产业得到了迅速发展,很多技术产品也随着成产,但是,人们对产品性能的要求也愈加高。
无刷直流电机是很多技术产品的核心部分,遍及于交通工具和工业设备等各个高新技术领域,相对于传统的控制方法,FOC具有效率高,噪声小,响应快等特点,因此近年来FOC算法发展非常迅速。
本文主要提出一种控制无刷直流电机的算法,通过对无刷直流电机控制系统的框架设计,尝试应用STM32达到FOC驱动控制板的基础上,推导FOC控制算法中的主要公式。
通过FOC算法控制无刷直流电机,既避免传统无刷直流电机的控制算法的不足,又提高电机系统运作效率;此外,FOC再结合无位置传感器算法,使得控制效能提高,减少了工艺成本,增大应用范围。
关键词:FOC;无刷电机;STM32;无位置传感器;电机参数AbstractIn recent years, the high-tech industry has developed rapidly, and a lot of technical products have been produced along with it. Brushless dc motor is the core part of many technical products, covering various high-tech fields such as transportation vehicles and industrial equipment. Compared with traditional control methods, FOC has the characteristics of high efficiency, low noise and fast response. Therefore, FOC algorithm has developed rapidly in recent years. This paper mainly proposes an algorithm to control the brushless dc motor. Through the frame design of the brushless dc motor control system, it tries to use STM32 to achieve the FOC drive control panel, and then deduces the main formula of the FOC control algorithm. The brushless dc motor is controlled by FOC algorithm, which not only avoids the shortage of the traditional brushless dc motor control algorithm, but also improves the operation efficiency of the motor system. In addition, FOC combined with sensorless algorithm improves control efficiency, reduces process cost and increases application scope. Keywords:FOC;BLDCM; STM32;Sensorless;Motor Parameter目录1.绪论 (1)1.1研究背景 (1)1.2国内外研究现状 (1)1.3选题背景和研究内容 (2)1.4论文结构 (2)2.无刷直流电机控制系统的基本结构 (4)2.1 无刷直流电机控制系统的基本结构 (4)2.1.1机械结构主体 (4)2.1.2无刷直流电机驱动部分 (5)2.2 无刷直流电机的控制原理 (5)2.3 无刷直流电机电流采样 (6)2.4 无刷直流电机起动 (9)2.4.1三段式起动法 (9)2.5 自动测量电机参数 (9)2.5.1绕组电阻 (10)2.5.2线圈电感 (10)2.5.3电机惯性 (10)2.5.4电机的摩擦力矩和阻尼系数 (11)2.5.5测量电机极对数 (11)3.无感磁场定向控制(FOC)算法基本原理 (12)3.1 坐标变换 (12)3.1.1CLARK变换 (12)3.1.2PARK变换 (13)3.1.3PARK反变换 (13)3.2 SVPWM (13)3.2.1SVPWM控制原理 (14)3.2.2SVPWM算法分析 (16)3.3无位置传感器算法 (17)3.3.1反电动势检测法 (17)3.3.2龙伯格状态观测器 (18)3.3.3高频注入法 (19)4.无刷直流电机控制系统的硬件平台 (20)4.1整体硬件平台 (20)4.1.1 主控板 (20)4.1.2 驱动板 (22)4.1.3 无刷直流电机 (25)插图目录图1.1系统结构及流程 (2)图2.1无刷直流电机控制系统的基本结构 (4)图2.2绕组的上下桥结构 (6)图2.3三相Duty Cycle变化情况 (7)图2.4情形一各相变化情况 (7)图2.5情形二各相变化情况 (8)图2.6情形三各相变化情况 (8)图2.7情形四各相变化情况 (9)图3.1第一扇区例子 (15)图4.1整体硬件平台结构图 (20)图4.2主控板电路 (21)图4.3外部选择电源电路 (21)图4.4LD1117稳压器电路 (22)图4.5L39050稳压器电路 (22)图4.6功率驱动电路 (23)图4.7电流检测电路 (24)图4.8电流保护电路 (25)图4.9反电动势检测电路 (25)图4.10三相无刷直流电机 (25)图5.1keil软件工程 (26)图5.2FOC运行流程图 (27)图6.1自动测量电机参数 (37)图6.2设定速度 (38)图6.3正反转速度设定 (38)图6.4设定速度为零 (39)图6.5测量速度为零 (39)表目录表3.1各相状态及对应幅值模 (14)表3.2 根据扇区切换开关顺序 (16)表3.3 扇区分布情况 (16)1.绪论1.1研究背景由于无刷直流电机拥有控制精度高和寿命长等优点,并且还保留有刷直流电机的一些机械优势,因此已经普及在各种各样的工业领域,如汽车行业、自动化控制和航空航天等[1]。
foc或dtc算法

foc或dtc算法摘要:一、算法背景1.foc 算法和dtc 算法的起源2.算法发展的历史背景二、算法原理1.foc 算法的原理介绍2.dtc 算法的原理介绍3.两种算法的关系与区别三、应用领域1.foc 算法在通信领域的应用2.dtc 算法在通信领域的应用3.两种算法在其他领域的应用四、优缺点分析1.foc 算法的优缺点2.dtc 算法的优缺点五、发展趋势与展望1.算法在未来的发展趋势2.可能面临的挑战与机遇正文:一、算法背景foc 算法(也称为直接转矩控制算法)和dtc 算法(也称为直接电流控制算法)都是针对三相交流电机控制问题提出的解决方案。
foc 算法起源于20 世纪80 年代,由德国科学家Klaus Blasius 首次提出。
而dtc 算法则稍晚一些,由美国科学家John G.Ziegler 和Nicholas A.氷Kim 于1993 年提出。
这两种算法在电机控制领域产生了深远的影响,成为了现代电机控制技术的基石。
二、算法原理foc 算法是一种基于矢量控制的电机控制策略,它通过直接控制电机的磁场和转矩来调节电机的转速和转矩。
具体来说,foc 算法将电机的磁场和转矩分别建模为一个独立的闭环控制系统,并通过PI 调节器对这两个闭环系统进行实时调节。
dtc 算法则是一种基于直接电流控制的电机控制策略,它通过直接控制电机的电流来调节电机的转速和转矩。
dtc 算法将电机的电流与磁场和转矩联系起来,通过调节电机电流的大小和相位来控制电机的运行状态。
三、应用领域foc 算法和dtc 算法在通信领域有广泛的应用。
例如,在数字通信系统中,foc 算法可以用于数字锁相环(PLL)的设计,提高系统的相位噪声性能。
而dtc 算法则可以用于数字预失真(DPD)技术中,提高功率放大器的线性度和效率。
此外,这两种算法还在家用电器、工业自动化、电动汽车等领域有广泛的应用。
四、优缺点分析foc 算法的优点在于控制精度高、动态响应快,能够实现高性能的电机控制。
foc 高频注入算法

foc 高频注入算法FOC是一种基于精确定位的高频注入算法,它常用于交流电机的磁通定向控制。
FOC的基本原理是通过在电机的双坐标轴上分别注入高频信号,从而实现对电机电流的精确控制。
具体来说,FOC分为两个阶段:电流反馈和位置反馈。
在电流反馈阶段,FOC通过电流传感器获取电机的实时电流信息,然后根据控制策略计算出合适的电压指令。
为了减小电机电流的谐波失真,FOC通常会在电流控制环节中注入高频信号。
这些高频信号可以通过PWM技术生成,然后通过逆变器输出给电机。
通过精确控制高频信号的振幅和频率,FOC可以实现对电机电流的精确控制,从而提高电机的性能和效率。
在位置反馈阶段,FOC通过位置传感器获取电机的转子位置信息,并将其与控制器中的理论位置进行比较。
为了实现更精确的位置控制,FOC通常会在位置控制环节中注入高频信号。
在这个阶段中,高频信号的作用是提高位置的精确度,减小转子位置的偏差,从而使电机能够更精确地跟踪理论位置。
通过以上两个阶段的协同作用,FOC可以实现对电机的精确控制。
使用FOC算法控制交流电机,可以实现高效率、高动态响应和高转矩密度,从而在众多应用领域,如汽车电动化、工业自动化等中发挥重要作用。
除了FOC算法本身,还有一些相关的技术和方法可以辅助FOC算法的实现和应用。
例如,用于传感器信号处理的滤波技术,用于高频信号生成的PWM技术,以及用于电机控制的PID控制器等等。
这些技术可以提高FOC算法的性能和稳定性,从而使其在实际应用中更加可靠和有效。
总之,FOC是一种基于精确定位的高频注入算法,通过在电机的电流和位置控制环节中注入高频信号,实现对电机的精确控制。
它在交流电机的磁通定向控制中发挥着重要作用,可以提高电机的性能和效率,并在众多领域中得到广泛应用。
e络盟推出全新自有品牌multicomp pro
CEM I 专题报道 I Feature Report(称为估测器或观测器)不能在零速或低速 下工作。
FOC 称为无传感器技术。
这意味 着,将没有霍尔传感器、磁位置传感器或光 轴编码器来提供转子位置。
为了发挥作用, FOC 算法从三个电机绕组获得电流反馈。
当 电机首次启动时,速度过低,反馈电路无法 获得良好的读数,电机以开环方式运行。
在 电机达到足够的转速(如50 rpm ),并且获 得良好的电流反馈后,控制回路闭合,进行 正常的FOC 。
为了能够在电机启动或低速运转时检测转 子位置,开发了一种使用高频注入(HFI )的技 术。
在这种技术中,转子中的三个绕组通过高 频PWM 信号逐一通电,并测量电流反馈信号。
通过比较这三个测量值,可以确定转子的准确 位置,并利用正确的PWM 信号以正确的方向启 动泵和压缩机的转子。
这样做也能更快地加速 电机。
另一项新技术称为“风转”。
通过风转, 可以重新启动处于滑行状态的电机,以匹配当前电机的位置和速度,从而实现平稳而不晃动 的重启。
这样既有助于降低噪声,又能提高电机耐用性。
此外,也可以通过使用FOC 最大程度地提 高转矩的方式来控制电机。
这种技术称为每安 培最大转矩(MTPA ),它允许电机在恒定转矩 阶段的闭环转换后加速旋转。
利用这种技术, 洗衣机可以实现高速旋转,从衣物中排出更多 的水,无人机的电机也可以在不到300 ms 内从0 rpm 加速到30000 rpm,从而实现更快的起飞。
提高安全性最后一个趋势至关重要。
行业内发起了一项提高产品功能安全性的运动。
这意味着电气元件一即控制电器电机的单片机(MCU )或 数字信号控制器(DSC )需要具有符合行业规 范的内置安全特性。
例如,IEC 60730 B 类安全 规范要求在启动时关闭MCU 或DSC 的PWM 信号 的默认状态,以防止任何可能导致电机转动的 瞬态尖峰电压。
未来,行业将为电机控制设计工程师编制一本功能安全手册,以帮助他们更 好地理解如何使用MCU 或DSC 电机控制器件中 内置的所有安全功能。
FOC实现概述

FOC实现概述FOC原理框图如下:其中涉及到两种坐标转换:1. Clark变换:常规的三相坐标系→静⽌的⼆相坐标系α、β正变换矩阵\left[ {\begin{array}{*{20}{c}} {\sqrt {\frac{2}{3}} }&{\frac{{ - 1}}{2}\sqrt {\frac{2}{3}} }&{\frac{{{\rm{ - }}1}}{2}\sqrt {\frac{2}{3}} }\\ 0&{\frac{{\sqrt 2 }} {2}}&{\frac{{{\rm{ - }}\sqrt 2 }}{2}}\\ {\frac{1}{{\sqrt 3 }}}&{\frac{1}{{\sqrt 3 }}}&{\frac{1}{{\sqrt 3 }}} \end{array}} \right]逆变换矩阵\left[ {\begin{array}{*{20}{c}} {\sqrt {\frac{2}{3}} }&0&{\frac{1}{{\sqrt 3 }}}\\ {\frac{{{\rm{ - }}1}}{{\sqrt 3 }}}&{\frac{{\sqrt 2 }}{2}}&{\frac{1}{{\sqrt 3 }}}\\ {\frac{{{\rm{ - }}1}}{{\sqrt 3 }}}&{\frac{{{\rm{ - }}\sqrt 2 }}{2}}&{\frac{1}{{\sqrt 3 }}} \end{array}} \right]2. Park变换:⼆相静⽌坐标系α、β→⼆相旋转坐标系d、q正变换矩阵\left[ {\begin{array}{*{20}{c}} {{\rm{cos}}\theta }&{\sin \theta }\\ { - \sin \theta }&{\cos \theta } \end{array}} \right]逆变换矩阵\left[ {\begin{array}{*{20}{c}} {{\rm{cos}}\theta }&{ - \sin \theta }\\ {\sin \theta }&{\cos \theta } \end{array}} \right]其中最关键的⼀步是确定转⼦位置和速度。
有感FOC算法学习与实现总结

有感FOC算法学习与实现总结⽂章⽬录基于STM32的有感FOC算法学习与实现总结1 前⾔Field Oriented Control磁场定向控制 (FOC),FOC是有效换向的公认⽅法。
FOC的核⼼是估计转⼦电场的⽅向。
⼀旦估计了转⼦的电⾓度,就将电动机的三相换相,以使定⼦磁场垂直于转⼦磁场。
本⽂参考了TI,microchip的相关⽂档,基于STM32F103系列单⽚机实现了带编码器的FOC算法,实现了对通⽤伺服电机(表贴式PMSM)的控制。
2 FOC算法架构FOC算法的整体架构如下图所⽰,采⽤了双闭环的控制系统,包括速度环和电流环,也叫转矩环,⽽传统的伺服驱动器还需要位置环,图中并未给出,这个后⾯另外描述,反馈部分采⽤双电阻采样,和增量编码器。
所以,从上图可以了解到,实现FOC算法总共需要以下⼏个部分;坐标变换,由于PMSM是⾮线性的复杂系统,为了实现控制上的解耦,需要进⾏坐标变换;Clark变换;Park变换;SVPWM模块;反馈量采集部分相电流采集编码器信号采集闭环控制部分可以分为三个环节;当然,根据需求,双闭环也⽐较常见;位置环速度环电流环下⾯会对每个环节的关键部分做⼀下介绍,具体的实现与细节由于篇幅有限会另外开篇幅做介绍。
3 坐标变换OABC OABC三相坐标到静⽌坐标系αβαβ坐标系可以分为恒幅值变换和恒功率变换,两者的主要区别就是变换系数不同,下⽂统⼀使⽤恒幅值变换。
3.1 Clark变换三相电流ABC分别为i A iA,i B iB,i C iC,根据基尔霍夫电流定律满⾜以下公式:i A+i B+i C=0iA+iB+iC=0静⽌坐标系αβαβ,αα轴的电流分量为iαiα,iβiβ,则Clark变换满⾜以下公式:iα=i A iβ=1√3∗iA+2√3∗iB iα=iA iβ=31∗iA+32∗iB3.2 Park变换Park变换的本质是静⽌坐标系αβαβ乘以⼀个旋转矩阵,从⽽得到dq dq坐标系,其中;d d 轴⼜叫直轴,⽅向与转⼦磁链⽅向重合;q q 轴⼜叫交轴,⽅向与转⼦磁链⽅向垂直;所以,帕克变换⼜叫交直变换,由静⽌坐标系αβαβ上的交流量最终变换到dq dq坐标系上的直流量;Park变换满⾜以下公式;i d=iα∗cosθ+iβ∗cosθi q=−iα∗cosθ+iβ∗cosθid=iα∗cosθ+iβ∗cosθiq=−iα∗cosθ+iβ∗cosθ3.3 Park反变换Park⼜叫直交变换,满⾜以下公式:iα=i d∗cosθ−i q∗sinθiβ=i d∗cosθ+i q∗cosθiα=id∗cosθ−iq∗sinθiβ=id∗cosθ+iq∗cosθ4 SVPWM实际的马鞍波如下图所⽰;5 反馈部分反馈部分需要采集相电流,电⾓度和速度,如下图所⽰;红⾊曲线表⽰i A iA;黄⾊曲线表⽰i B iB;蓝⾊曲线表⽰电⾓度θeθe;图中黄⾊箭头所指的点,可以看到满⾜以下条件:θe=0i A=0θe=0iA=05.1 相电流相电流采样通常有三种⽅案;单电阻采样;双电阻采样;三电阻采样;5.2 电⾓度和转速电⾓度的测量需要通过对编码器进⾏正交解码,STM32的TIM定时器⾃带编码器接⼝,可以很轻松实现对正交编码器的正交编码;6 闭环控制6.1 电流环最终给出电流闭环的结构,如下图所⽰;红⾊曲线表⽰iαiα黄⾊曲线表⽰iβiβ粉⾊曲线表⽰i q iq蓝⾊曲线表⽰i d id由于使⽤的表贴式PMSM,满⾜以下条件:L d=L q=L s Ld=Lq=Ls所以,d d轴和q q轴可以共⽤同⼀套PI参数,可以通过经验试凑法进⾏参数整定,或者可以通过测量电机参数,计算PI参数的⼤致范围,然后再进⾏细调。
foc高频注入法和磁链观测法

foc高频注入法和磁链观测法随着科技的不断进步,人们对于电磁场的研究也越来越深入。
在电磁场研究中,foc高频注入法和磁链观测法是两种常用的实验方法。
本文将分别对这两种方法进行介绍和分析。
我们来了解一下foc高频注入法。
foc高频注入法是一种通过在物体表面注入高频电流来产生电磁场的实验方法。
这种方法适用于对电磁场进行定量测量和研究。
在实验中,我们可以通过将高频电流注入到物体表面,利用感应原理来测量电磁场的分布和强度。
这种方法具有操作简便、测量精度高等优点,因此被广泛应用于电磁场的研究和应用实践中。
接下来,让我们来了解一下磁链观测法。
磁链观测法是一种通过观察磁链的变化来研究电磁场的实验方法。
在实验中,我们可以通过在电磁场中放置一个磁铁或者线圈,利用磁感应强度的变化来观测电磁场的分布和强度。
这种方法具有非接触式测量、实时观测等优点,因此在电磁场的研究和应用中得到了广泛的应用。
那么,foc高频注入法和磁链观测法有何区别呢?首先,这两种方法的原理不同。
foc高频注入法是通过注入高频电流来产生电磁场,而磁链观测法是通过观察磁链的变化来研究电磁场。
其次,这两种方法适用的场景也有所不同。
foc高频注入法适用于对电磁场进行定量测量和研究,而磁链观测法适用于对电磁场进行实时观测和分析。
此外,这两种方法在实验操作和测量精度上也存在一定的差异。
在实际应用中,foc高频注入法和磁链观测法都发挥着重要的作用。
foc高频注入法可以用于电磁场的定量测量和研究,例如在电磁兼容性测试中,可以通过foc高频注入法来测量设备的电磁辐射和抗干扰性能。
而磁链观测法则可以用于电磁场的实时观测和分析,例如在医学影像中,可以通过磁链观测法来观测人体内部的磁场分布,从而实现对疾病的诊断和治疗。
总结起来,foc高频注入法和磁链观测法是两种常用的电磁场实验方法。
它们在原理、适用场景和应用领域上都有所差异,但都发挥着重要的作用。
在未来的研究和应用中,我们可以根据实际需求选择合适的方法,以便更好地研究和利用电磁场的特性。
电机高频注入原理_STM32TALK无感FOC方案原理机器控制难点分析

电机高频注入原理_STM32TALK无感FOC方案原理机器控制难点分析一、电机高频注入原理电机高频注入是一种通过在电机中注入高频信号来实现无传感器场定位的方法。
在传统的电机控制中,需要使用传感器来获取电机的位置信息,从而实现闭环控制。
而在无感FOC方案中,通过在电机中注入高频信号,可以通过对电机响应的观测来推测电机的位置,从而实现闭环控制。
具体实现时,需要在电机的定子绕组中注入高频信号,这个高频信号被称为注入信号。
注入信号的频率需要远高于电机运行的频率,通常是几十倍甚至几百倍。
注入信号的功率一般很小,通常是电机运行时功率的几千分之一、通过在电机中注入高频信号,可以在电机响应中观察到一系列的谐波成分,这些谐波成分与电机的位置息息相关,通过对这些谐波成分的观测和分析,就可以推测出电机的位置。
二、STM32TALK无感FOC方案原理STM32TALK是一种基于STM32微控制器的无感FOC方案,该方案通过在电机中注入高频信号,实现无传感器的场定位。
具体实现时,STM32TALK方案使用了一种称为“注入信号模型”的方法来推测电机的位置。
注入信号模型是通过将电机的注入信号与电流进行数学运算,得到一个与电机位置相关的信号,通过对这个信号的观测和分析,就可以推测出电机的位置。
具体实现时,STM32TALK方案使用了一种称为“注入信号模型”的方法来推测电机的位置。
在注入信号模型中,注入信号与电流的乘积被称为“注入信号模型值”,这个值与电机的位置相关。
通过对注入信号模型值的观测和分析,就可以推测出电机的位置。
为了实现这个推测,STM32TALK方案使用了一种叫做“模型匹配”的方法,即将注入信号模型值与一系列预先计算好的模型值进行匹配,通过寻找最佳匹配,就可以得到电机的位置。
在实际的机器控制中,无感FOC方案面临着一些难点和挑战。
1.高频信号注入:高频信号注入需要在电机中注入高频信号,这对于电机和电机驱动器的设计和实现提出了一定要求。
两种高频信号注入法的无传感器运行研究
两种高频信号注入法的无传感器运行研究一、本文概述随着电力电子技术的飞速发展,电机控制系统在各个领域的应用日益广泛,尤其在工业自动化、电动汽车、航空航天等领域发挥着重要作用。
电机控制的核心在于对电机运行状态的精确感知和高效控制,而无传感器运行技术则成为近年来研究的热点。
其中,两种高频信号注入法在无传感器运行中表现出显著的潜力和应用价值,因此本文将对这两种方法进行深入研究。
本文将首先介绍无传感器运行技术的基本原理和重要性,阐述高频信号注入法在其中的地位和作用。
随后,本文将详细介绍两种高频信号注入法的具体实现方式,包括其原理、特点、适用范围等,并对这两种方法进行比较分析,探讨其各自的优缺点。
在此基础上,本文将通过理论分析和实验验证,研究两种高频信号注入法在无传感器运行中的应用效果。
具体来说,本文将通过搭建实验平台,对两种高频信号注入法在不同电机类型、不同运行条件下的性能进行测试和评估,以期得出准确、可靠的结论。
本文将总结两种高频信号注入法在无传感器运行中的研究成果,分析其在实际应用中的潜力和挑战,并提出相应的改进建议和发展方向。
本文的研究旨在推动无传感器运行技术的发展,为电机控制系统的智能化、高效化提供有力支持。
二、旋转高频信号注入法研究旋转高频信号注入法是一种广泛应用于无传感器运行中的技术,其基本原理是通过向电机注入高频旋转电压信号,进而通过检测电机的响应来获取电机的位置信息。
这种方法具有较高的位置检测精度和动态性能,因此被广泛应用于各种电机控制系统中。
在旋转高频信号注入法中,注入的高频旋转电压信号会对电机的气隙磁场产生影响,进而在电机中产生高频电流响应。
通过对这个响应进行检测和分析,可以准确地获取电机的转子位置信息。
这种方法不需要额外的传感器,因此可以降低系统的成本和复杂性。
旋转高频信号注入法的实现过程通常包括信号的生成、注入、检测和分析等步骤。
需要生成一个高频旋转电压信号,并将其注入到电机中。
然后,通过检测电机的电流响应,可以获取到电机的转子位置信息。
FOC计算公式
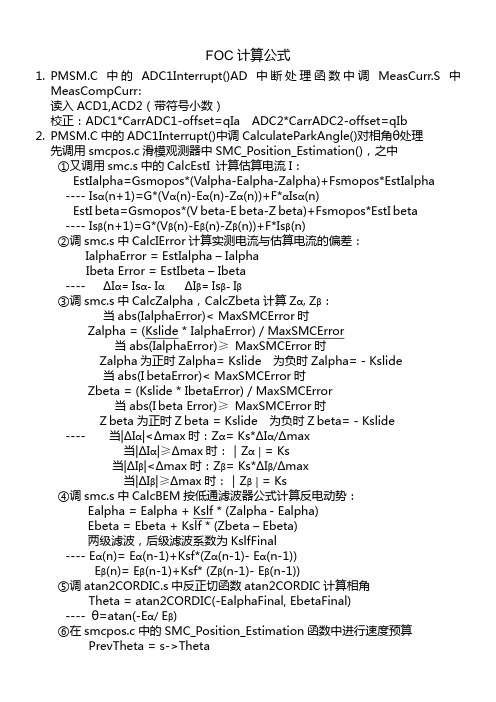
FOC计算公式1.PMSM.C中的ADC1Interrupt()AD中断处理函数中调MeasCurr.S中MeasCompCurr:读入ACD1,ACD2(带符号小数)校正:ADC1*CarrADC1-offset=qIa ADC2*CarrADC2-offset=qIb2.PMSM.C中的ADC1Interrupt()中调CalculateParkAngle()对相角θ处理先调用smcpos.c滑模观测器中SMC_Position_Estimation(),之中①又调用smc.s中的CalcEstI 计算估算电流I:EstIalpha=Gsmopos*(Valpha-Ealpha-Zalpha)+Fsmopos*EstIalpha---- Isα(n+1)=G*(Vα(n)-Eα(n)-Zα(n))+F*αIsα(n)EstI beta=Gsmopos*(V beta-E beta-Z beta)+Fsmopos*EstI beta---- Isβ(n+1)=G*(Vβ(n)-Eβ(n)-Zβ(n))+F*Isβ(n)②调smc.s中CalcIError计算实测电流与估算电流的偏差:IalphaError = EstIalpha – IalphaIbeta Error = EstIbeta – Ibeta---- ΔIα= Isα- IαΔIβ= Isβ- Iβ③调smc.s中CalcZalpha,CalcZbeta计算Zα, Zβ:当abs(IalphaError)< MaxSMCError时Zalpha = (Kslide * IalphaError) / MaxSMCError当abs(IalphaError)≥MaxSMCError时Zalpha为正时Zalpha= Kslide 为负时Zalpha=-Kslide当abs(I betaError)< MaxSMCError时Zbeta = (Kslide * IbetaError) / MaxSMCError当abs(I beta Error)≥MaxSMCError时Z beta为正时Z beta = Kslide 为负时Z beta=-Kslide ---- 当|ΔIα|<Δmax时:Zα= Ks*ΔIα/Δmax当|ΔIα|≥Δmax时:|Zα|= Ks当|ΔIβ|<Δmax时:Zβ= Ks*ΔIβ/Δmax当|ΔIβ|≥Δmax时:|Zβ|= Ks④调smc.s中CalcBEM按低通滤波器公式计算反电动势:Ealpha = Ealpha + Kslf * (Zalpha- Ealpha)Ebeta = Ebeta + Kslf * (Zbeta – Ebeta)两级滤波,后级滤波系数为KslfFinal---- Eα(n)= Eα(n-1)+Ksf*(Zα(n-1)- Eα(n-1))Eβ(n)= Eβ(n-1)+Ksf* (Zβ(n-1)- Eβ(n-1))⑤调atan2CORDIC.s中反正切函数atan2CORDIC计算相角Theta = atan2CORDIC(-EalphaFinal, EbetaFinal)---- θ=atan(-Eα/ Eβ)⑥在smcpos.c中的SMC_Position_Estimation函数中进行速度预算PrevTheta = s->Theta─AccumThetaCnt++ if (AccumThetaCnt == IRP_PERCALC) Omega = AccumTheta ---- 求累加角Σθ+=θ(n)-θ(n-1) 更新θ(n-1)= θ(n) 累加次数m(θCnt)+=1 当m = M (速度计算需要的PWM 定时次数)时,速度预算值ω=Σθ 此前仅算出ω(Omega),未算 V(速度Speed),即未找到V=Kv*ω Kv=60/T(测算速度时间)/磁极对数 ⑦调smc.s 中CalcOmegaFltred 对ω进行数字滤波 OmegaFltred=OmegaFltred+FiltOmCoef*(Omega-OmegaFltred) ---- ωfl (n)= ωfl (n-1)+ K ωfl *[ω(n)- ωfl (n-1)] K ωfl:滤波系数=2πFc/Fpwm Fpwm :脉宽调制频率 Fc: 滤波器截止频率(电机最低转速*磁极对数/60)⑧在smcpos.c 中的SMC_Position_Estimation 函数中计算滤波器系数 ?? Kslf = OMEGA0 * _PI / IRP_PERCALC; KslfFinal = OMEGA0 * _PI / IRP_PERCALC ⑨在smcpos.c 中的SMC_Position_Estimation 函数中进行相位补偿计算 ThetaOffset=OmegaFltred*(SLOPEFRACn+SLOPEINTn)+CONSTAN Tn 不同的速度有不同的补偿,程序分几个频段,式中3常数取不同值(n 不同)。
foc 高频注入算法

FOC高频注入算法是一种用于估计电机转子位置的方法。
该方法的基本原理是将一个高频电压信号注入到电机的两相静止坐标系(alfa,beta),或估计的两相旋转坐标系中(d,q),然后将这个高频电压信号叠加到FOC控制的基频分量上。
当这个叠加后的高频信号被施加到电机的三相绕组时,感应出的高频电流会携带有关转子位置的信息。
通过对这些感应的高频电流进行信号处理,特别是使用带通滤波器来提取所需的信息,就可以准确地估计出转子的位置。
高频注入法有两种主要的实现方法:旋转高频电压注入法和脉振高频电压注入法。
其中,脉振高频电压注入法因其能够同时适应表贴式和内嵌式电机,且具有较好的通用性,因此在实际应用中更为常见。
此外,FOC高频注入算法在实际应用中还需要进行一系列的测试和开发,例如初始位置检测、NS极性识别、带载运行测试等。
foc 高频注入算法 -回复

foc 高频注入算法-回复什么是FOC高频注入算法?FOC(Field-Oriented Control)高频注入算法是一种针对电机控制领域的先进算法。
该算法通过注入高频信号来提高电机控制系统的性能和响应速度。
FOC高频注入算法被广泛应用于伺服驱动系统、无刷直流电机控制系统等领域,它在实时控制系统中起到了至关重要的作用。
FOC高频注入算法基本原理是将高频正弦信号通过一个微小的偏置电流注入到电机定子电流,以实现对电机速度、转矩和位置等状态的精确控制。
注入的高频信号可以通过增加电机定子电流的频谱来优化系统的控制性能。
通过注入高频信号,FOC高频注入算法可以提高电机响应速度、减小系统阶跃响应的震荡幅度、提高闭环控制系统的动态性能、增加系统的稳定性等。
FOC高频注入算法的实现主要分为以下步骤:1. 信号产生:首先,需要产生高频正弦信号。
可以使用数字信号处理器(DSP)或者嵌入式系统中的时钟信号进行数字信号合成。
合成的信号通常具有可调节的频率、振幅和相位,以满足不同的应用需求。
2. 信号注入:将产生的高频正弦信号通过一个幅度和相位调节器连接到电机控制系统的电流环中。
注入的信号通过改变电机控制系统中的电流参考值来改变电机的输出响应。
通过调整信号的频谱和相位,可以实现对电机速度、转矩和位置等状态的精确控制。
3. 控制系统优化:通过改变高频注入信号的频谱特性,可以优化系统的控制性能。
例如,通过增加高频信号在一定频段的幅度来提高系统动态响应速度;通过改变信号的相位来降低系统阶跃响应的震荡幅度。
优化控制系统的性能需要通过实验和仿真等手段来选择适当的注入信号频谱和相位参数。
4. 实时反馈调整:根据实际应用需求和系统的反馈信号,可以通过实时调整高频注入信号的频谱和相位来改变电机的控制性能。
这种调整可以通过直接修改算法参数或者信号合成器的输入参数来实现。
在实际应用中,可以根据电机的工作环境、负载情况和性能要求来动态调整注入信号的参数,以保持控制性能的最佳状态。
STM32 V4.0 电机软件库培训1

15
工具:GUI, IDE ,demo 板
工具:ST MC Workbench 1/2
• STMCWB PC软件通过图形界面产生软件库的参数头文件,方便用户 对软件库的配置及马达的调试
1 2 3 4
17
工具:ST MC Workbench 2/2
• 实时串口通讯
• 与PC实时通讯,实现马达的启动/停止,或速度的加减速 • 调试和监控软件参数 • 实时画出马达的参考及实际速度曲线
• 电流采样
• • 1-SHUNT 3-SHUNT
• 更换EVB可支持不同的MCU
EVB
• 更换EVB可支持不同的MCU
22
功率板
• 更换功率板可支持不同的功率
23
单板demo板
• 控制及功率部分集成在一块demo板上
24
STM32F0xx风扇demo板 1/2
• 拓扑结构 ωr*
STM32F0xx
Speed Control
vabc
Space Vector PWM
Current Control
i q*
MTPA & FLUX WEAKENING CONTROLLER
+
PID
-
vqs vds
vαβ
REVERSE PARK + circle limitation
i d*
+
θr el
PID
-
Te*
PID
• 必须读取定子的电流(1-shunt/3-shunt/ICS) • 必须读取转子的位置及速度(Encoder/Hall/Sensorless算法) • 电流的实时控制(PI/D):
• 不容易控制:高频正弦参考值、幅值的调制及与转子磁链的耦合 • 通过参考坐标系的转换来简化耦合问题
foc控制算法及原理详解

foc控制算法及原理详解FOC(field-oriented control)为磁场导向控制,又称为矢量控制(vector control),是一种利用变频器(VFD)控制三相交流马达的技术,利用调整变频器的输出频率、输出电压的大小及角度,来控制马达的输出。
其特性是可以个别控制马达的的磁场及转矩,类似他激式直流马达的特性。
由于处理时会将三相输出电流及电压以矢量来表示,因此称为矢量控制。
达姆施塔特工业大学的K. Hasse及西门子公司的F. Blaschke分别在1968年及1970年代初期提出矢量控制的概念。
Hasse提出的是间接矢量控制,Blaschke提出的是直接矢量控制。
布伦瑞克工业大学的维尔纳·莱昂哈德(Leonhard further)进一步开发磁场导向控制的控术,因此交流马达驱动器开始有机会取代直流马达驱动器。
当时微处理器尚未商品化,但已经出现泛用的交流马达驱动器。
当时相较于直流马达驱动器,交流马达驱动器的成本高、架构复杂,而且不易维护。
而当时的矢量控制需要许多传感器及放大器等元件,因此无法将矢量控制应用在交流马达驱动器中。
派克变换一直被用在同步马达及感应马达的分析及研究,是了解磁场导向控制最需要知道的概念。
这个概念是罗伯特·派克(Robert Park)在1929年的论文中提出的。
派克变换被列为二十世纪发表电力电子相关论文中,第二重要的论文。
派克变换的重要性是可以将马达有关的微分方程,由变系数微分方程变成“时不变”系数的微分方程。
矢量控制可以适用在交流感应马达及直流无刷马达,早期开发的目的为了高性能的马达应用,可以在整个频率范围内运转、马达零速时可以输出额定转矩、且可以快速的加减速。
不过相较于直流马达,矢量控制可配合交流马达使用,马达体积小,成本及能耗都较低,因此开始受到产业界的关注。
矢量控制除了用在高性能的马达应用场合外,也已用在一些家电中VFD-VE系列的向量控制核心技术是FOC((Field Oriented Control),也就是业界通称的磁场导向控制或磁束向量控制。
foc 速度环参数计算

foc 速度环参数计算摘要:一、引言1.介绍FOC(磁场定向控制)技术2.阐述FOC 速度环参数计算的重要性二、FOC 速度环参数计算方法1.计算速度环比例增益Kp2.计算速度环积分时间常数Ti3.计算速度环微分时间常数Td三、FOC 速度环参数计算实例1.实例描述2.计算过程与结果四、总结1.概括FOC 速度环参数计算的关键点2.强调参数计算对系统性能的影响正文:FOC(磁场定向控制)技术是一种广泛应用于电机控制领域的先进技术。
通过磁场定向控制,电机可以在各种工况下实现高性能、高效率和低噪音。
在FOC 技术中,速度环参数的计算是非常重要的一环,因为它直接影响到系统的性能。
本文将详细介绍FOC 速度环参数的计算方法,并通过实例进行说明。
首先,我们来看FOC 速度环参数的计算方法。
主要包括以下三个步骤:1.计算速度环比例增益Kp:Kp 是控制器的比例增益,决定了控制器的响应速度。
计算公式为:Kp = 2 * (1 / (1 + (ω_max / (2 * π * f_s))^2)),其中,ω_max 为电机额定转速,f_s 为采样频率。
2.计算速度环积分时间常数Ti:Ti 是控制器的积分环节时间常数,影响控制器的稳态性能。
计算公式为:Ti = 2 * π * f_s / (ω_max * sqrt(1 - (Kp *ω_max / (2 * π * f_s))^2))。
3.计算速度环微分时间常数Td:Td 是控制器的微分环节时间常数,有助于提高系统的动态性能。
计算公式为:Td = 2 * π * f_s / (ω_max * (Kp *ω_max / (2 * π * f_s))^2)。
接下来,我们通过一个实例来演示FOC 速度环参数的计算过程。
假设我们有一台电机,额定转速为3000rpm,采样频率为1000Hz。
1.计算速度环比例增益Kp:代入公式,得Kp = 2 * (1 / (1 + (3000 / (2 * π * 1000))^2)) ≈ 0.0523。
高频方波注入的永磁电机无传感器控制改进算法
电气传动 2017 年 第 47 卷 第 2 期
高频方波注入的永磁电机无传感器控制 改进算法
薛映霞,陈庆,何凤有 (中国矿业大学 信息与电气工程学院,江苏 徐州 221008)
摘要:为提高高频信号注入的内置式ቤተ መጻሕፍቲ ባይዱ磁同步电机无传感器控制系统的带宽,提出了一种方波信号注入 的无传感器控制改进算法。利用方波信号代替传统的正弦波信号,将注入电压频率提高至逆变器的开关频 率,通过简单的算术运算求取高频载波电流和基频电流,避免了带通滤波器和低通滤波器的使用,简化了信号 处理过程,提高了系统的动态响应速度。仿真和实验结果验证了改进算法的可行性和有效性。
关键词:永磁电机;高频方波注入;无传感器控制;带宽;算术运算 中图分类号:TM341 文献标识码:A DOI:10.19457/j.1001-2095.20170203
Improved Algorithm of Sensorless Control of PMSM Based on High Frequency Square
Wave Signal Injection XUE Yingxia,CHEN Qing,HE Fengyou (School of Information and Electrical Engineering,China University of Mining & Technology,
Xuzhou 221008,Jiangsu,China)
基金项目:国家“十三五”重点研发计划“煤矿深井建设与提升基础理论及关键技术”(2016YFC060096) 作者简介:薛映霞(1992-),女,硕士研究生,Email:853869152@
FOC及无感控制的算法移植指南

FOC及无感控制的算法移植指南FOC及无感控制的算法移植指南1、下载正确的FOC源代码目前市面上主流的能驱动电机的MCU。
基本上都带有FOC库。
很多公司还提供可以用于修改的FOC源代码。
还有些甚至于提供了无位置算法的源代码。
可以下载到代码的有ST,TI,MICROCHIP,NXP,RENESAS等芯片公司。
直接到官网下载即可。
为保证代码的可行性,最好从官网下载代码。
不要从第三方下载。
避免产生不必要的调试过程。
2、找到与芯片的硬件初始化相关的代码。
ADC部分的初始化。
不同的芯片,ADC工作模式不同。
ADC的初始化方法以及数据采样方法不同。
ADC的采样,根据电路结构不同。
完全不同。
单电阻采样模式。
需要在一个三角波内,进行两次ADC采样。
而且软件还要特殊处理。
才能做到采集的数据。
这种方式下。
ADC需要有一个专用的定时器配合来实现ADC采样。
两电阻或电流传感器方式下,ADC有两种模式可以实现。
一种是在波峰或波谷的前后一点位置处,触发ADC采样。
另一种方式,就是在定时器的波峰或波谷中断进入后,第一时间进行ADC采样。
ST的ARM芯片CORTEX-M0系列,由于只有一组ADC单元,且ADC转换出来的结果只有一个缓冲区保证。
所以,数据采集通常采用DMA的方式。
将多个ADC采样到的数据缓存到一个ADC数组中。
如M3或M4等系列。
MCU有两组ADC单元。
可以一次性采样两个通道。
在波峰波谷中断的模式下,可以设成分时采样不同的通道。
也可以用DMA方式采样(ST的2个ADC 单元,输出结果地址是相连的。
且刚好组成了一个32位数,用DMA方式,可以一次将两个ADC单元的结果全部采样出来。
)RENESAS等芯片,ADC的输出结果是根据通道来设定的缓冲。
因此,只需要触发ADC 即可。
ADC转换后的数据,分开存放在不同的寄存器当中。
所以,这类芯片,可以省掉DMA 的操作方法。
定时器部分定时器根据电机的载频来设定。
生成三角波(递增计数到设定值以后,开始递减计数)。
foc控制算法及原理详解
foc控制算法及原理详解FOC(field-oriented control)为磁场导向控制,又称为矢量控制(vector control),是一种利用变频器(VFD)控制三相交流马达的技术,利用调整变频器的输出频率、输出电压的大小及角度,来控制马达的输出。
其特性是可以个别控制马达的的磁场及转矩,类似他激式直流马达的特性。
由于处理时会将三相输出电流及电压以矢量来表示,因此称为矢量控制。
达姆施塔特工业大学的K. Hasse及西门子公司的F. Blaschke分别在1968年及1970年代初期提出矢量控制的概念。
Hasse提出的是间接矢量控制,Blaschke提出的是直接矢量控制。
布伦瑞克工业大学的维尔纳·莱昂哈德(Leonhard further)进一步开发磁场导向控制的控术,因此交流马达驱动器开始有机会取代直流马达驱动器。
当时微处理器尚未商品化,但已经出现泛用的交流马达驱动器。
当时相较于直流马达驱动器,交流马达驱动器的成本高、架构复杂,而且不易维护。
而当时的矢量控制需要许多传感器及放大器等元件,因此无法将矢量控制应用在交流马达驱动器中。
派克变换一直被用在同步马达及感应马达的分析及研究,是了解磁场导向控制最需要知道的概念。
这个概念是罗伯特·派克(Robert Park)在1929年的论文中提出的。
派克变换被列为二十世纪发表电力电子相关论文中,第二重要的论文。
派克变换的重要性是可以将马达有关的微分方程,由变系数微分方程变成“时不变”系数的微分方程。
矢量控制可以适用在交流感应马达及直流无刷马达,早期开发的目的为了高性能的马达应用,可以在整个频率范围内运转、马达零速时可以输出额定转矩、且可以快速的加减速。
不过相较于直流马达,矢量控制可配合交流马达使用,马达体积小,成本及能耗都较低,因此开始受到产业界的关注。
矢量控制除了用在高性能的马达应用场合外,也已用在一些家电中VFD-VE系列的向量控制核心技术是FOC((Field Oriented Control),也就是业界通称的磁场导向控制或磁束向量控制。
高频注入提取角度的方法

高频注入提取角度的方法1. 引言1.1 背景介绍高频注入提取角度的方法是一种新兴的数据处理技术,其在信号处理和图像处理领域具有广泛的应用前景。
背景介绍部分将探讨高频注入提取角度方法的起源和发展历程,以及该方法在实际应用中所面临的挑战和机遇。
高频注入提取角度的概念最早可以追溯到20世纪60年代,当时该方法主要是用于声纳和雷达信号处理领域。
随着计算机技术和信号处理算法的不断发展,高频注入提取角度方法逐渐被应用到了更广泛的领域,如医学影像处理、通信系统等。
在当前科技发展的背景下,越来越多的研究者开始关注高频注入提取角度方法的研究和应用。
这一新兴技术的出现为数据处理领域带来了新的思路和方法,有望为解决实际问题提供更为高效和精准的解决方案。
进一步深入研究高频注入提取角度方法的原理和应用,对于提高数据处理的效率和准确性具有重要意义。
在接下来的章节中,将详细介绍高频注入提取角度方法的原理和实际应用,探讨其优势和局限性,以及展示一些相关的案例分析。
我们将对高频注入提取角度方法的应用前景进行展望,总结本文的主要观点和结论。
【字数:260】1.2 研究意义高频注入提取角度的方法是一种新的研究方向,具有重要的研究意义。
高频注入提取角度的方法可以用于改善图像或视频的质量,提高图像的细节和清晰度,从而帮助用户更好地了解和分析图像中的信息。
高频注入提取角度的方法可以应用于医学影像处理领域,帮助医生更准确地诊断疾病,提高医疗水平。
高频注入提取角度的方法可以应用于安防领域,提高监控系统的监控效果,增强安全性。
高频注入提取角度的方法还可以在虚拟现实、增强现实等领域得到广泛应用,为用户提供更加真实、生动的体验。
随着人工智能和深度学习等技术的不断发展,高频注入提取角度的方法也将为这些领域的发展提供新的思路和方法。
研究高频注入提取角度的方法具有重要的理论和应用价值,对提高图像处理技术水平,推动相关领域的发展具有积极的推动作用。
1.3 研究现状随着科技的不断发展,高频注入提取角度的方法在多个领域得到了广泛应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
foc 高频注入算法
FOC(Field-Oriented Control)是一种电机控制方法,通过将
三相交流电机的控制分解为两个正交的分量,在转子定向上施加控制,从而使电机可以以最佳效率运行。
在FOC高频注入
算法中,通过注入高频电流来测量电机的实际参数,以便更好地进行控制。
本文将解释FOC高频注入算法的原理和相关参
考内容。
FOC高频注入算法的原理是在电机驱动过程中,通过在转子
定子上注入高频电流来干扰电机的运行,从而测量电机的实际参数,如电阻、电感和电机的转动惯量。
这些测量值是控制电机的关键参数,可以用来实现更精确的控制。
FOC高频注入
算法采用了一种特殊的电流注入方式,通过注入高频电流,可以更好地测量电机的实际参数,从而提高电机的控制精度和效率。
FOC高频注入算法的关键是如何注入高频电流并测量电机的
响应。
一种常见的方法是使用高频信号发生器和电流传感器。
高频信号发生器会产生一个高频信号,可以将这个信号传送给电机的定子上。
电流传感器可以测量注入到电机中的高频电流,从而得到电机的实际参数。
根据电流传感器测量的值,可以得到电机的电阻、电感和转动惯量等参数,进而用于更精确的控制。
FOC高频注入算法在电机控制领域有广泛的应用。
例如,在
无刷直流电机上应用FOC高频注入算法,可以通过测量电机
的实际参数来实现更精确的位置和速度控制。
在工业自动化领
域,FOC高频注入算法可以用于控制交流电机,实现更高的效率和精度。
在电动汽车领域,FOC高频注入算法可以用于对电机进行精确的控制,提高电动汽车的驱动性能和能效。
对于FOC高频注入算法的研究,有许多相关的参考内容可供学习和参考。
以下是一些不涉及链接的相关参考内容:
1. 高频注入法在交流电机参数测量中的应用研究:该论文介绍了高频注入法在交流电机参数测量中的应用,包括注入电流的设计和测量结果的分析。
2. 基于FOC高频注入法的无刷直流电机精确控制:该论文研究了基于FOC高频注入法的无刷直流电机精确控制的方法,包括注入电流的设计和控制策略。
3. FOC高频注入法在电动汽车驱动系统中的应用:该论文探讨了FOC高频注入法在电动汽车驱动系统中的应用,包括对电机参数的测量和对驱动系统性能的提高。
4. 基于FOC高频注入法的交流电机控制策略优化:该文献研究了基于FOC高频注入法的交流电机控制策略优化,包括注入电流的设置和控制器参数的优化。
通过学习和参考这些相关内容,可以更好地理解FOC高频注入算法的原理和应用,进而在电机控制领域进行更精确和高效的控制。