verilog 设计可综合的状态机的指导原则
verilog 状态机 最佳写法

verilog 状态机最佳写法Verilog编程语言广泛应用于数字电路设计中,特别是在嵌入式系统和硬件描述语言中。
状态机是一种常用的设计模式,可以帮助我们描述复杂的行为和控制逻辑。
本文将介绍如何使用Verilog编写状态机,并提供一些最佳实践。
第一部分:Verilog简介Verilog是一种硬件描述语言,最初由美国自动化控制协会(ACM)开发。
它是一种用于描述、仿真和生成数字电路的高级编程语言。
Verilog提供了描述硬件的能力,使我们能够在逻辑级别上描述电路的行为。
第二部分:状态机简介状态机是一种抽象的数学模型,用于描述系统或程序的行为。
它由一组状态、输入和输出组成,并在不同状态之间进行转换。
状态机可以用于描述任何连续或离散的系统,包括硬件和软件。
第三部分:状态机的设计方法在Verilog中,我们可以使用参数化模块和状态寄存器来描述状态机。
参数化模块可以接受输入和输出,根据当前状态和输入转换到下一个状态,并产生相应的输出。
下面是一个简单的例子:```module fsm #(parameter N=3) (input logic clk, reset, input logic [N-1:0] input, output [N-1:0] output);typedef enum logic [1:0] {S0, S1, S2} state_t;state_t state, next_state;always_ff @(posedge clk or posedge reset) begin if (reset) beginstate <= S0;end else beginstate <= next_state;endendalways_comb begincase (state)S0: begin// State S0 behavioroutput = input;next_state = S1;endS1: begin// State S1 behavioroutput = ~input;next_state = S2;endS2: begin// State S2 behavioroutput = 2'b11;next_state = S0;enddefault: begin// Default behavioroutput = 2'b00;next_state = S0;endendcaseendendmodule```在这个例子中,我们定义了一个状态机模块,它有一个时钟信号、一个复位信号、一个输入信号和一个输出信号。
状态机的设计与实现
状态机的设计与实现作者:zhsj 日期:2015-7-29在数字逻辑电路中,状态机是一个非常重要的概念,也是常用的一种结构,状态机常常用于序列检测、序列信号的产生以及时序产生等方面。
利用Verilog语言也可以编写出可综合的状态机,并有多种编写格式和编写原则,本文主要整理的是状态机的一般编写方法和形式,以及可综合的状态机的一些设计原则。
一、状态机的结构1.1 状态机的组成状态机是组合逻辑和寄存器逻辑的特殊组合,一般包括两个部分:组合逻辑部分和寄存器逻辑部分。
寄存器用于存储状态,组合电路用于状态译码和产生输出信号。
状态机的下一个状态及输出不仅与输入信号有关,还与寄存器当前状态有关,其基本要素有三个,即状态、输入和输出。
状态也叫做状态变量。
在逻辑设计中,使用状态划分逻辑顺序和时序规律。
例如,要设计一个交通灯控制器可以用允许通行、慢行和禁止通行作为状态;设计一个电梯控制器,每层就是一个状态等。
输入是指状态机中进入每个状态的条件。
有的状态机没有输入条件,其中的状态转移比较简单;有的状态机有输入条件,当某个输入条件存在时,才能转移到相应的状态。
例如,交通灯控制器就没有输入条件,状态随着时间的改变而自动跳转;电梯控制器是存在输入的,每层的上下按键,以及电梯内的层数选择按键都是输入,会对电梯的下一个状态产生影响。
输出是指在某一状态时特定发生的事件。
例如,交通灯控制器在允许通行状态输出绿色,缓行状态输出黄色,禁止通行状态输出红色;电梯控制器在运行时一直会输出当前所在的层数及当前运行的方向(上升或下降)。
1.2 状态机的分类根据输出是否与输入信号有关,状态机可以划分为Mealy型状态机和Moore型状态机两种;根据输出是否与输入信号同步,状态机可以划分为异步状态机和同步状态机两种。
由于目前的电路设计中以同步设计为主,所以本文只介绍同步状态机。
1.2.1 Mealy型状态机Mealy型状态机的输出同时依赖于当前的状态和输入信号,其结构如图1.1所示。
利用veriloghdl设计状态机

利用V e r i l o g H D L设计状态机(共4页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--利用Verilog HDL设计状态机1.设计要求利用Verilog HDL设计一个电路,对输入的一串二进制数,用于检测序列中连续3个或者3个以上的1,状态转换如图所示:2.设计步骤第一步:安装Quartus II软件并破解第二步:根据设计要求编写程序代码第三步:生成仿真电路图和波形如图3.程序代码module moore(clk,din,op);input clk,din;output op;reg[1:0] current_state,next_state;reg op;parameter S0=2'b00,S1=2'b01,S2=2'b10,S3=2'b11;always@(posedge clk)begincurrent_state<=next_state; endalways@(current_state or din) begincase(current_state)S0:beginop=0;if(din==0)next_state=S0;elsenext_state=S1; endS1:beginop=0;if(din==0)next_state=S0;elsenext_state=S2; endS2:beginop=0;if(din==0)next_state=S0;elsenext_state=S3; endS3:beginop=1;if(din==0)next_state=S0;elsenext_state=S3; enddefault:beginop=0;next_state=S0;endendcaseendendmodule4.仿真电路图和波形图电路图如下图:图一电路原理图图二转换关系图波形图如下图:波形图5.实验结论与心得体会实验结果:由仿真波形可以看出,利用该状态机,可以实现输入一串二进制数然后检测序列中连续3个或者3个以上的1,实现上面转换图要求的功能,符合实验要求。
verilog 状态机定义 -回复

verilog 状态机定义-回复如何在Verilog中定义状态机。
在Verilog中,状态机(State Machine)是一种用于建模和描述电子系统中各种状态转换的行为模型。
它可以用于设计和实现各种数字电路和系统,从简单的计数器到复杂的通信协议都可以通过状态机来实现。
本文将详细介绍如何在Verilog中定义状态机,包括状态和状态转换的表示方式,以及如何实现状态转换和输出的逻辑。
第一步:定义状态状态是状态机中的核心概念,它描述了系统的各种工作状态。
在Verilog 中,我们可以使用参数或宏定义来表示状态。
例如,假设我们有一个简单的状态机,它有三种状态:A、B和C。
我们可以使用宏定义来定义这些状态:` 定义状态`define STATE_A 1`define STATE_B 2`define STATE_C 3上述代码中,我们使用宏定义为每个状态分配了一个唯一的标识符。
这样,在后续的代码中我们可以直接使用这些标识符来表示状态。
第二步:定义状态转换状态转换是状态机中状态之间的转换关系。
它描述了由哪个状态转换到哪个状态,以及在何种条件下进行转换。
在Verilog中,我们可以使用组合逻辑或时序逻辑来定义状态转换。
对于组合逻辑,我们可以使用always_comb块或assign语句来定义状态转换。
例如,假设状态A可以转换到状态B或状态C,转换条件是某个输入信号x等于1。
我们可以使用always_comb块来表示这个转换:always_comb begincase (currentState)`STATE_A: nextState = (x == 1) ? `STATE_B : `STATE_C;`STATE_B: nextState = ...`STATE_C: nextState = ...endcaseend上述代码中,我们使用一个case语句来根据当前状态和输入信号x的值确定下一个状态。
当状态为A时,如果x等于1,下一个状态为B,否则为C。
Verilog设计的可综合性与问题分析
Verilog设计的可综合性与问题分析前⾔⽤Verilog HDL编写的设计模块最终要⽣成实际⼯作的电路,因此,设计模块的语法和编写代码风格会对后期电路产⽣影响,所以,若要编写可实现的设计模块,就需要注意⼀些问题可综合语法可综合的设计是最终实现电路所必需的,所以弄清哪些语法是可综合的,哪些语法是不可综合的⾮常有必要,⽽且设计者也必须知道⼀个代码能否被综合成最终电路;例如:写⼀个简单的除法a/b,想妄图直接通过综合⼯具⽣成⼀个除法器是不现实的,还有有符号数和浮点数的时候也需要注意。
总之,设计者的思路定要从软件⾓度转变到硬件⾓度,很多在软件中可以直接使⽤的情况到了硬件电路就需要从很底层的⾓度来编写。
可综合的语句有:1)module 与 endmodule 模块声明的关键字2)输⼊input,输出output和双向端⼝inout的声明3)变量类型reg,wire,integer4)参数parameter和宏定义define5)所有的Verilog HDL内建门,如:add,or之类的门6)数据流语句assign语句7)⾏为级中敏感列表⽀持电平和边沿变化,类似posedge,negedge8)always,function可以被综合,task中如果不含延迟可以被综合9)顺序块begin……end可以被综合10)if和 case语句可以被综合不可被综合的语句在Verilog HDL中不可被综合的语法这⾥也简单列出来:(1)初始化initial结构不能被综合,电路中不会存在这样的单元。
电路中⼀旦通电就会⾃动获得初始值,除此之外时序电路可以⽤复位端完成初始化组合,电路不需要初始化(2)#带来的延迟不可被综合。
电路中同样也不会存在这样简单的延迟电路,所有的延迟都要通过计时电路或交互信号来完成(3)并⾏块fork…join不可被综合,并⾏块的语义在电路中不能被转化(4)⽤户⾃定义原语UP不可被综合(5)时间变量time和实数变量real不能被综合(6) wait ,event , repeat ,forever等⾏为级语法不可被综合(7)⼀部分操作符可能不会被综合,例如,除法/操作和求余数%操作补充:综合⼯具也在不断更新和加强,有些现在不能被综合的语法慢慢地会变得可以综合,像⽐较简单的initial结构在⼀些 FPGA⼯具中也可以被识别,同时能被转化为电路形式。
[工学]西安电子科技大学verilog教程1-2
![[工学]西安电子科技大学verilog教程1-2](https://img.taocdn.com/s3/m/7e9aa877240c844768eaeea1.png)
西安电子科技大学
雷达信号处理国防科技重点实验室
2. 数字信号处理
数字信处理系统往往要进行一些复杂的数字运算和数据处理, 并且又有实时响应的要求,他们通常是由高速专用数字逻辑系统或专 用数字信号处理器所构成,电路是相当复杂的。因此只有在高速大规 模集成电路设计制造技术进步的基础上,才有可能实现真正有意义的 实时数字信号处理系统。对实时数字信号处理系统的要求不断提高, 也推动了高速大规模集成电路设计制造技术的进步。现代专用集成电 路的设计是借助于电子电路设计自动化(EDA)工具完成的。学习和 掌握硬件描述语言(HDL)是使用电子电路设计自动化工具的基础。
• 由传统的观点出发,可以从三个不同的方面来研究计算,即从数 学、科学和工程的不同角度;由比较现代的观点出发,可以从四 个主要的方面来研究计算,即从算法和数据结构、编程语言、体 系结构、软件和硬件设计方法学。
• 一个复杂的数字系统设计往往是从算法到由硬线连接的门级逻辑 结构,再映射到硅片的逐步实现的过程。
&Moorby,刘明业等译。
西安电子科技大学
雷达信号处理国防科技重点实验室
课时及考试安排
授课时数:30课时 上机时数;14课时 考试时数:90分钟 成绩计算:大作业*40%+考试*60%
西安电子科技大学
雷达信号处理国防科技重点实验室
课程内容安排
第一部分 初级篇
第一章. 概述及设计工具介绍 第二章. Verilog HDL的基本知识 第三章. Verilog HDL基本概念 第四章. 常用Verilog语法之一 第五章.常用Verilog语法之二 第六章.常用Verilog语法之三 第七章.常用Verilog语法之四 第八章.常用Verilog语法之五
verilog之可综合与不可综合

verilog之可综合与不可综合可综合的意思是说所编写的代码可以对应成详细的,不行综合就是所写代码没有对应的电路结构,例如行为级语法就是一种不行综合的代码,通常用于写测试文件。
建立可综合模型时,需注重以下几点:不用法initial不用法10之类的延时语句不用法循环次数不确定的循环语句,如forever,while等不用法用户自定义原语(UDP元件)尽量用法同步方式设计电路用always块来描述组合规律时,应列出全部输入信号作为敏感信号列表,即always@(*)全部的内部寄存器都应当能够被复位,在用法实现设计时,尽量用法器件的全局复位端作为系统的总复位对时序规律描述和建模,尽量用法非堵塞赋值的方式,对组合规律描述和建模,虽然堵塞和非堵塞赋值的方式都可以,但在同一过程快中最好不要同时用法堵塞赋值和非堵塞赋值。
我个人比较推举用堵塞赋值的方式描述组合规律不能在多个always块中对同一个变量举行赋值。
对同一个对象不能既用法非堵塞赋值,又用法堵塞赋值假如不决定让变量生成锁存器,那么必需在用法if语句或case语句时补全全部条件不行综合语句:initial 初始化语句,只能在testbench中用法,不行综合event event在同步testbench时更实用,不能综合real 不支持real数据类型的综合time 不支持time数据类型的综合assign 和 deassign 不支持对reg数据类型赋值的综合,但支持wire类型赋值的综合以开始的延时语句不能被综合verilog是一种硬件描述语言,我们在写verilog 代码时,首先要有所要写的module在硬件上如何实现的概念,而不是去想编译器如何说明这个module。
比如在打算是否用法 reg 定义时,要问问自己物理上是不是真正存在这个 register, 假如是,它的clock 是什么? D 端是什么?Q 端是什么?有没有清零和置位?同步还是异步?再比如上面研究的三态输出问题,首先想到的应当是在 register 的输出后面加一个三态门,而不是如何才干让编译器知道要“赋值”给一个信号为三态。
VERILOG语言编写规范
VERILOG语言编写规范1 目的本规范的目的是提高书写代码的可读性可修改性可重用性,优化代码综合和仿真结果,指导设计工程师使用VerilogHDL规范代码和优化电路,规范化公司的ASIC设计输入从而做到1. 逻辑功能正确2.可快速仿真3. 综合结果最优如果是hardware model)4. 可读性较好。
2 范围本规范涉及Verilog HDL编码风格,编码中应注意的问题, Testbench的编码等。
本规范适用于Verilog model的任何一级( RTL behavioral, gate_level),也适用于出于仿真,综合或二者结合的目的而设计的模块。
3 定义Verilog HDL : Verilog 硬件描述语言FSM :有限状态机伪路径:静态时序分析( STA)认为是时序失败,而设计者认为是正确的路径4 引用标准和参考资料下列标准包含的条文通过在本标准中引用而构成本标准的条文在标准出版时所示版本均为有效所有标准都会被修订使用本标准的各方应探讨使用下列标准最新版本的可能性Actel HDLCoding Style GuiderSun MicrosystemsRevision 1.0VerilogStyle and Coding Guidelines5 规范内容5.1 Verilog 编码风格本章节中提到的Verilog编码规则和建议适应于 Verilog model的任何一级( RTL behavioral,gate_level) 也适用于出于仿真,综合或二者结合的目的而设计的模块。
5.1.1 命名规范选择有意义的信号和变量名,对设计是十分重要的。
命名包含信号或变量诸如出处,有效状态等基本含义下面给出一些命名的规则。
1. 用有意义而有效的名字有效的命名有时并不是要求将功能描述出来如For ( I = 0; I < 1024; I = I + 1 )Mem[I]<= #1 32’b0;For 语句中的循环指针I 就没必要用loop_index作为指针名。
Verilog HDL代码描述对状态机综合的研究
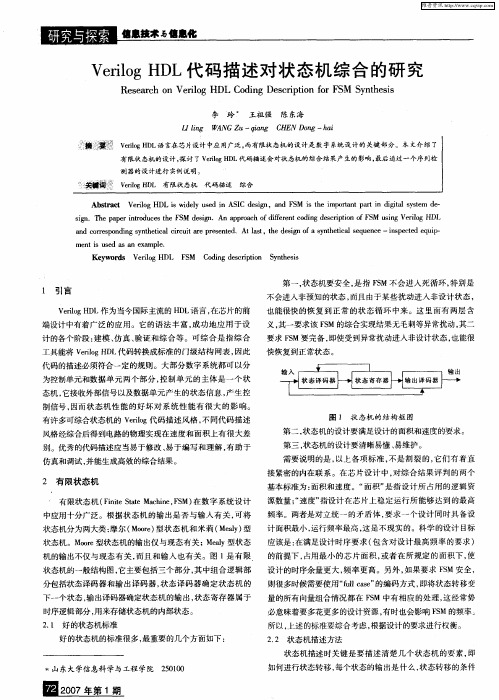
1 引 言 V ro D elg L作为当今 国际主流的 H L语 言, 芭片的前 i H D 在 =
端 设计 中有着 广 泛 的应 用 。它 的 语 法 丰 富 , 功 地 应 用 于设 成
第 一 , 态 机要 安全 , 指 F M 不 会 进 入 死 循 环 , 别 是 状 是 S 特
应该是 : 在满足设计 时序 要求( 含对设计最 高频 率的要求) 包 的前提下 , 占用最小的芯 片面积 , 或者 在所规定 的面积下 , 使
设计 的时序余量更大 , 频率更高。另外 , 如果要求 F M安全 , S
则很多时候 需要使用“u ae 的编码 方式 , fls ” lc 即将状态转 移变 量的所有向量组合情况都在 F M 中有相应 的处理 , S 这经常势
计的各个 阶段 : 建模 、 真 、 仿 验证 和综合等 。可综 合是指综 合 工具能将 V ro D e l H L代码转换成标 准的门级结构 网表 , ig 因此 代码的描述必须符合一定的规则 。大部分数字系统都可以分 为控制单元和数据单元两个 部分 , 控制单 元的主体是 一个状
态机 , 它接收外部信号 以及数据单元 产生的状态信 息, 产生控
分包括状态译码器 和输 出译码器 , 状态译码器 确定状态机 的 下一个状态 , 输出译码器确定状态机 的输 出, 状态 寄存 器属于
时序逻辑部分 , 用来存储状态机 的内部状态 。
计 面积 最 小 , 行频 率 最 高
状态机 。M r 型状态机 的输出仅与现态 有关 ;M a oe e y型状态 l 机的输 出不仅 与现态有关 , 而且和输入 也有关。图 1 是有 限 状态机 的一般结构 图, 它主要包括三个部分 , 中组合 逻辑部 其
verilog 状态机定义 -回复
verilog 状态机定义-回复如何使用Verilog定义状态机在电子设计领域中,状态机是一种常用的模型,用于描述系统在不同输入和条件下的不同状态和状态转移。
Verilog是一种硬件描述语言(HDL),广泛应用于电子设计自动化(EDA)工具以及可编程逻辑器件(如FPGA)的开发。
本文将逐步介绍如何使用Verilog定义状态机。
第一步:了解状态机的基本概念和Verilog的语法在开始使用Verilog定义状态机之前,首先需要对状态机的基本概念有一定的了解。
状态机由一组状态和状态之间的转移构成。
在Verilog中,通常使用有限状态机(FSM)来描述状态机。
Verilog的语法结构包括模块定义、端口定义、输入输出变量、内部变量、时钟和状态转移逻辑等。
第二步:定义状态和状态转移首先,需要使用Verilog定义状态。
每个状态在Verilog中都被表示为一个唯一的二进制编码。
可以使用参数或局部参数定义状态数。
例如,使用二进制`reg [1:0] state`定义一个包含4个状态的状态机。
然后,使用assign语句将每个状态与对应的二进制编码关联起来。
例如,`assign s0=2'b00;`表示状态0为二进制编码00。
接下来,需要定义状态之间的转移条件。
这可以通过使用if-else语句和逻辑运算符实现。
例如,当输入信号A为1时,从状态0转移到状态1,可以使用如下代码:`if(A==1) begin state = s1; end`。
第三步:定义时序控制在状态机中,时序控制是非常重要的,因为它决定何时进行状态转移和在特定状态下执行哪些操作。
时序控制通常使用时钟和触发器(flip-flop)实现。
在Verilog中,使用always块定义时序控制。
首先,需要定义一个时钟信号,并使用always块对时钟进行处理。
例如:`always (posedge clk) begin`表示在时钟的上升沿触发时执行always块内的逻辑。
verilog中可综合和不可综合语句概述

verilog中可综合和不可综合语句概述Verilog 中可综合及不可综合语句概述Verilog 硬件描述语言有很完整的语法结构和系统,类似高级语言,这些语法结构的应用给我们的设计描述带来很多方便。
但是,我们知道,Verilog 是描述硬件电路的,它是建立在硬件电路的基础上的。
有些语法结构是不能与实际硬件电路对应起来的,也就是说我们在把一个语言描述的程序映射成实际硬件电路中的结构时是不能实现的。
下面就是我多年工作经验总结出来的大部分综合工具支持或不支持的verilog 语法结构。
一.用verilog 建立可综合模型的原则要保证Verilog HDL赋值语句的可综合性,在建模时应注意以下要点:(1)不使用initial 。
(2)不使用#10。
(3)不使用循环次数不确定的循环语句,如forever、while 等。
(4)不使用用户自定义原语(UDP元件)。
(5)尽量使用同步方式设计电路。
(6)除非是关键路径的设计,一般不采用调用门级元件来描述设计的方法,建议采用行为语句来完成设计。
(7)用always过程块描述组合逻辑,应在敏感信号列表中列出所有的输入信号。
(8)所有的内部寄存器都应该能够被复位,在使用FPGA实现设计时,应尽量使用器件的全局复位端作为系统总的复位。
(9)对时序逻辑描述和建模,应尽量使用非阻塞赋值方式。
对组合逻辑描述和建模,既可以用阻塞赋值,也可以用非阻塞赋值。
但在同一个过程块中,最好不要同时用阻塞赋值和非阻塞赋值。
(10)不能在一个以上的always过程块中对同一个变量赋值。
而对同一个赋值对象不能既使用阻塞式赋值,又使用非阻塞式赋值。
(11)如果不打算把变量推导成锁存器,那么必须在if语句或case 语句的所有条件分支中都对变量明确地赋值。
( 12)避免混合使用上升沿和下降沿触发的触发器。
( 13)同一个变量的赋值不能受多个时钟控制,也不能受两种不同的时钟条件(或者不同的时钟沿)控制。
Verilog语言的可综合性

V e r i l o g 语言的可综合性可综合的Verilog HDL 语句都是V e r i l o g H D L 标准( I E E E 1 3 6 4 ) 的一个子集,并且因所用工具不同而异。
在设计中不能采用不可综合的语句( 测试代码除外) 。
下面我们讨论一下大部分综合工具都支持的语句,具体到某种工具的特性还要查看说明文档。
对于数据类型、运算符、赋值语句、基本门级元件等的可综合性问题,因为都有固定的规定,这里就不多讨论了。
组合逻辑和时序逻辑的可综合性: 用a s s i g n 语句对w i r e 型变量进行赋值,综合后的结果是组合逻辑电路。
用a l w a y s @ ( 电平敏感变量表) ,即电平敏感的a l w a y s 块描述的电路综合后的结果是组合逻辑电路或电平敏感的锁存器,此时,a l w a y s 块内赋值语句左边的变量是r e g或i n t e g e r 型,块中要避免组合反馈回路,每次执行a l w a y s 块时,在生成组合逻辑的a l w a y s 块中被赋值的所有信号必须都在敏感电平列表中列出,否则在综合时将会为没有列出的信号隐含的产生一个透明的锁存器,这时综合后的电路已不是纯组合电路了。
用a l w a y s @( p o s e d g e c l o c k ) 或a l w a y s @ ( n e g e d g e c l o c k ) 块描述的电路综合为同步时序逻辑电路,设计同步时序逻辑电路的关键是建立描述该电路状态转移的可综合的有限状态机模型,在V e r i l o g H D L语言中最常用的描述同步时序状态机的结构是a l w a y s 和块内的c a s e . i f 语句,除了紧跟在a l w a y s 后的@( p o s e d g e c l o c k ) , @ ( n e g e d g e c l o c k ) 外,a l w a y s 块中不允许其他的@ ( e v e n t ) 语句,目前大多数综合工具不能综合V e r i l o g H D L描述的异步状态机,所以用V e r i l o g 设计的时序电路应该是同步时序电路。
可综合的Verilog语句
可综合Verilog语句⏹一:综合就是从采用Verilog HDL 语言描述的寄存器传输级电路模型构造出门级网表的过程.产生门级网表之后,逻辑优化器读入网表并以用户指定的面积和定时约束为目标优化网表.⏹二.设计流程中的综合⏹Verilog HDL允许用户在不同的抽象层次上对电路进行建模,这些层次从门级、寄存器传输级、行为级直至算法级。
因此,同一电路就可以有多种不同的描述方式,但不是每一中描述都是可综合的。
事实上,Verilog HDL 原本被设计成一种仿真语言,而不时一种综合语言。
结果导致Verilog HDL 中很多结构没有相应的硬件可以对应,例如系统调用$display.同样也不存在用于寄存器传输级综合的Verilog HDL 标准子集.⏹正是由于存在这些问题,不同的综合系统所支持的Verilog HDL 综合子集是不同的.由于Verilog HDL 中不存在单个的对象来表示锁存器或触发器,所以每一种综合系统都会提供不同的机制以实现锁存器或触发器的建模.因此各种综合系统都定义了自己的Verilog HDL 可综合子集以及自己的建模方式.⏹使用Verilog HDL 以不同的方式描述了同一电路.某综合系统支持对方式A和方式B的综合,但可能不支持对方式C的综合,这意味着综合模型在不同的综合系统之间通常是不可移植的.⏹这一局限性使设计者不仅需要理解Verilog HDL ,而且必须理解特定综合系统的建模方式,才能编写出可综合的模型.可综合的数据类型⏹1.网线数据类型:⏹Wire,wor,wand,tri,supply0,supply1⏹2.寄存器数据类型:⏹Reg,integer⏹Time,real:不能综合.⏹3.常量:⏹整型.⏹实型和字符串型不能综合.可综合的运算符⏹1.逻辑运算符能直接映射成硬件中的基本逻辑门.⏹2.算术运算符⏹3.关系运算符:⏹能综合的有:>,<,<=,>=.⏹4.相等性算符:⏹能够综合的有:==和!=.⏹不能综合:===和!==(有些工具按==和!=综合).⏹5.移位运算符:⏹<<和>>,移位腾出的位都补0.多个时钟的可综合情况⏹1.多个时钟的情况:对变量的赋值不能受多个时钟控制例如:⏹ module multclk(clk1,clk2,addclk,and,rstn,subclr,subn,dsadd,dssub);⏹input clk1,addclk,adn,rstn,subclr,subn,clk2;⏹output dsadd,dssub;⏹reg dsadd,dssub;⏹reg addstate,substate;⏹always @(posedge clk1)⏹begin⏹addstate<=addclk^(adn|rstn);⏹substate<=subclr^(subn&rstn);⏹end⏹always @(posedge clk2)⏹begin⏹dsadd<=addstate;⏹dssun<=substate;⏹end⏹ endmodule⏹2.多相位时钟:对变量的赋值不能受两种不同的时钟条件的控制.⏹module multphase(clk,a,b,c,e);⏹input clk,a,b,c;⏹output e;⏹reg e,d;⏹always @(posedge clk)⏹e<=d|c;⏹always @(negedge clk)⏹d<=a&b;⏹ endmodule用有限状态机实现的3位二进制计数器.(带进位)module fsm_count(clk,rst,dout,cout);input clk,rst;output [2:0] dout;output cout;reg cout;reg [2:0] dout;reg [3:0] state;always @(posedge clk){cout,dout}<=state;parameter zero=4'b1000,one=4'b0001,two=4'b0010,three=4'b0011,four=4'b0100, five=4'b0101,six=4'b0110,seven=4'b0111,init=4'b0000;always @(posedge clk)beginif(!rst)state<=init;elsebegincase(state)zero:state<=one;init:state<=one;one: state<=two;two:state<=three;three:state<=four;four:state<=five;five:state<=six;six:state<=seven;seven:state<=zero;default:state<=init;endcaseendend状态机设计的一般原则:状态机是逻辑设计中的最重要的设计内容之一,通过状态转移图设计手段可以将复杂的控制时序图形化表示,分解为状态之间的转换关系,将问题简化。
第五讲状态机设计及其指导原则全篇

第五讲状态机设计及其指导原则1/ 38第五讲状态机设计及其指导原则1/ 38制作人:梁瑞宇单位:河海大学制作人:梁瑞宇单位:河海大学第五讲状态机设计及其指导原则1 状态机是一种设计思想方法2状态机结构3状态机设计的其他技巧4状态机设计步骤第五讲状态机设计及其指导原则2/ 38第五讲状态机设计及其指导原则2/ 38制作人:梁瑞宇单位:河海大学制作人:梁瑞宇单位:河海大学z 状态机是一种设计思想方法第五讲状态机设计及其指导原则3/ 38第五讲状态机设计及其指导原则3/ 38制作人:梁瑞宇单位:河海大学制作人:梁瑞宇单位:河海大学原语描述module noconditional (clk,nrst,state,event);input clk,nrst input state;output event;reg event;reg [2:0] CS; //CurrentState reg[2:0] NS; //NextStateparameter [2:0] //one hot with zero idleidle = 3’b000,dorm = 3'b001,diningroom = 3'b010,classroom = 3'b100;第五讲状态机设计及其指导原则4/ 38第五讲状态机设计及其指导原则4/ 38制作人:梁瑞宇单位:河海大学制作人:梁瑞宇单位:河海大学//sequential state transitionalways @ (posedge clk or negedge nrst)if (!nrst) CS <= idle; else CS <= NS; //combinational condition judgment always @ (nrst or CS)begincase (CS)idle:idle_task;NS = dorm;dorm:dorm_task;NS = diningroom;diningroom:diningroom_task;NS = classroom;classroom:classroom_task;NS = dorm;default:idle_task;NS = dorm;endcase end endmodule第五讲状态机设计及其指导原则5/ 38第五讲状态机设计及其指导原则5/ 38制作人:梁瑞宇单位:河海大学制作人:梁瑞宇单位:河海大学第五讲状态机设计及其指导原则6/ 38第五讲状态机设计及其指导原则6/ 38制作人:梁瑞宇单位:河海大学制作人:梁瑞宇单位:河海大学 状态机的本质--对具有逻辑顺序或时序规律事件的一种描述方法 状态机的两个应用思路:-从状态变量入手-明确电路的输出的关系第五讲状态机设计及其指导原则7/ 38第五讲状态机设计及其指导原则7/ 38制作人:梁瑞宇单位:河海大学制作人:梁瑞宇单位:河海大学对于逻辑电路而言,小到一个简单的时序逻辑,大到复杂的微处理器,都适合用状态机方法进行描述。
基于Verilog HDL的高速可综合FSM设计

( eat n f o u r cec, en nv r t o hn , ig a 6 0 C ia D pr met mp t i e Oca i sy f ia Q n do2 6 7 , hn) oC eS n U e i C 1
了一种 适合 高速 系统的寄存 器输 出型 状 态机 。 最后通 过 实例给 出了寄存 器输 出型状 态机 的状 态编码 方法及 其可 综合 Vro el ig
编码风格 。
关 键 词 : 限 状 态 机 ; V ro HD ; 可 综 合 ; 编 码 风 格 有 ei g L l
中 图法分类 号: P 9 T 31
c mb ain l u u o ls i dfr ihs e ds s m. A tt c iewi gsee u u rs ne ,wh c utdf r o i t a t t in t l ut 0 g ・p e t n o op s s we e h ye s e ma hn t r i rdo t tspe e td a h e t p i ih i s i s e o g —p e s m.F al,ame o f tt e c dn o rgseigteF M o tu a ds n eia l Vei gc dn l i p o i e h s e ds t ye n y i l h t do s e n o igfr e i r h S a t n up t n t s b e rl o igs e s r vd d s yh z o y t
基于 V ro 郭 忠 文
( 中国海洋 大学 计算机科学系,山东 青 岛 267) 60 1
verilog可综合
verilog综合小结一:基本Verilog中的变量有线网类型和寄存器类型。
线网型变量综合成wire,而寄存器可能综合成WIRE,锁存器和触发器。
二:verilog语句结构到门级的映射连续性赋值:assign连续性赋值语句逻辑结构上就是将等式右边的驱动左边的结点。
因些连续性赋值的目标结点总是综合成由组合逻辑驱动的结点。
Assign语句中的延时综合时都将忽视。
过程性赋值:过程性赋值只出现在always语句中。
阻塞赋值和非阻塞赋值就该赋值本身是没有区别的,只是对后面的语句有不同的影响。
建议设计组合逻辑电路时用阻塞赋值,设计时序电路时用非阻塞赋值。
过程性赋值的赋值对象有可能综合成wire,latch,和flip-flop,取决于具体状况。
如,时钟控制下的非阻塞赋值综合成flip-flop。
过程性赋值语句中的任何延时在综合时都将忽略。
建议同一个变量单一地使用阻塞或者非阻塞赋值。
逻辑操作符:逻辑操作符对应于硬件中已有的逻辑门算术操作符:V erilog中将reg视为有符号数,而integer视为有符号数。
因此,进行有符号操作时使用integer,使用无符号操作时使用reg。
进位:通常会将进行运算操作的结果比原操作数扩展一位,用来存放进位或者借位。
如:Wire [3:0] A,B;Wire [4:0] C;Assign C=A+B;C的最高位用来存放进位。
关系运算符:关系运算符:<,>,<=,>=和算术操作符一样,可以进行有符号和无符号运算,取决于数据类型是reg ,net还是integer。
相等运算符:==,!=注意:===和!==是不可综合的。
可以进行有符号或无符号操作,取决于数据类型移位运算符:左移,右移,右边操作数可以是常数或者是变量,二者综合出来的结果不同。
部分选择:部分选择索引必须是常量。
BIT选择:BIT选择中的索引可以用变量,这样将综合成多路(复用)器。
敏感表:Always过程中,所有被读取的数据,即等号右边的变量都要应放在敏感表中,不然,综合时不能正确地映射到所用的门。
基于Verilog HDL的有限状态机设计与描述

不会 进 入 死 循 环 , 使 由于 某 些 扰 动 进 入 非 法 状 态 , 能 很 快 即 也
的恢 复 到 正 常 的 状 态 循 环 中来 。
能 力 , 系统 在 系 统 级 或 寄 存 器 传 输 级 进 行 描 述 。 对
限状 态 机 已经 成 为关 键 。 传 统 的 有 限 状 态 机 的 描 述 方 式 有 状 态 转 移 图 , 态 转 移 状
图 1 有 限状 态机 结 构
() 限状 态 机 要 安 全 , 定 性 高 。这 就 要求 有 限 状 态 机 1有 稳
列 表 两 种 。随着 E A 技 术 的发 展 , 们 开 始 用 硬 件 描 述 语 言 D 人
sye n ei gHDL d srpin f S r to u e , s bl , ra a it, s e da dae fh s ls ed srb d Fn l , tls dV rl a o ecit s F M fei rd c d t it o o i n a i y e d bl i y p e rao tees e e c e . ial n y t r a i y
维普资讯
第 2 卷 第 4 9 期
VO . 9 12 N O. 4
计 算机 工 程 与设 计
Co mp t rE g n e n n sg u e n i e r g a d De in i
20 年 2 08 月
F b.2 0 e 0 8
文章编号 :0 072 20 ) 40 5 —3 10 —04(0 8 0 —9 80
De in a dd s rp in o n t tt c i eb s d o e i gHDL sg n e c t f i saema h n a e nv r o i o i f e l
状态机(FSM)与可综合代码
两种类型的块语句
命名块(named block)
• 在关键词begin或fork后加上 :<块名称> 对块进行命名
module named_ blk; ... begin : seq_blk ... end ... fork : par_blk ... join ... endmodule
• 在命名块中可以声明局部变量 • 可以使用关键词disable禁止一个命名块
module EvenChecker(err,din,clk,rst); input din,clk,rst; always @(posedge clk or posedge rst) output err; if (rst) begin reg dout; cnt <= 4'b1000; reg [3:0] cnt; evencheck <= 1'b0; reg evencheck; err <= 1'b0; reg err; end else begin if (cnt==4'b1000) begin err <= evencheck; evencheck <= din; end else evencheck <= evencheck ^ din; if (cnt == 4'b1000) cnt <= 4'b0000; else cnt <= cnt + 1; end endmodule
Example
init_state 0/1 1/0 1/0 a b 0/0 1/0 c 0/1 1/0 d
0/0
有限状态机的显式描述(3)
输入/输出定义 • 输入:reset, clk, seq; • 输出: seq_puls;
有限状态机的Verilog设计与研究

谢谢观看
end
endcase
end
end
endmodule
该有限状态机使用三个寄存器来存储当前的状态,并在每个时钟周期检查输入 信号和当前状态来确定下一个状态。如果接收到读取信号,它将输出与输入相 同的数据,并在下一个时钟周期回到空闲状态。如果接收到写入信号,它也会 输出与输入相同的数据,并在下一个时钟周期回到空闲状态。该有限状态机的 设计是可综合的,因为它只包含基本的逻辑门和触发器,并且它的输出只依赖 于当前的状态和输入信号。
end else begin state <= STANDBY;
end
end
endcase
end
end
assign led = state;
endmodule
有限状态机的测试
为了确保有限状态机的正确性,需要对Verilog设计的有限状态机进行测试。 以下是测试过程中需要注意的几点:
end else begin state <= IDLE;
end
end
FLASH: begin
if (flash_timeout) begin state <= STANDBY;
end else begin state <= FLASH;
end
end
STANDBY: begin
if (activate) begin state <= FLASH;
有限状态机的Verilog设计与研究
01 引言
目录
02 有限状态机的设计
03 reg [1:0] state;
05
end else begin
04
if (rst) begin
06
Verilog语言的可综合性
V e r i l o g 语言的可综合性可综合的Verilog HDL 语句都是V e r i l o g H D L 标准( I E E E 1 3 6 4 ) 的一个子集,并且因所用工具不同而异。
在设计中不能采用不可综合的语句( 测试代码除外) 。
下面我们讨论一下大部分综合工具都支持的语句,具体到某种工具的特性还要查看说明文档。
对于数据类型、运算符、赋值语句、基本门级元件等的可综合性问题,因为都有固定的规定,这里就不多讨论了。
组合逻辑和时序逻辑的可综合性: 用a s s i g n 语句对w i r e 型变量进行赋值,综合后的结果是组合逻辑电路。
用a l w a y s @ ( 电平敏感变量表) ,即电平敏感的a l w a y s 块描述的电路综合后的结果是组合逻辑电路或电平敏感的锁存器,此时,a l w a y s 块内赋值语句左边的变量是r e g或i n t e g e r 型,块中要避免组合反馈回路,每次执行a l w a y s 块时,在生成组合逻辑的a l w a y s 块中被赋值的所有信号必须都在敏感电平列表中列出,否则在综合时将会为没有列出的信号隐含的产生一个透明的锁存器,这时综合后的电路已不是纯组合电路了。
用a l w a y s @( p o s e d g e c l o c k ) 或a l w a y s @ ( n e g e d g e c l o c k ) 块描述的电路综合为同步时序逻辑电路,设计同步时序逻辑电路的关键是建立描述该电路状态转移的可综合的有限状态机模型,在V e r i l o g H D L语言中最常用的描述同步时序状态机的结构是a l w a y s 和块内的c a s e . i f 语句,除了紧跟在a l w a y s 后的@( p o s e d g e c l o c k ) , @ ( n e g e d g e c l o c k ) 外,a l w a y s 块中不允许其他的@ ( e v e n t ) 语句,目前大多数综合工具不能综合V e r i l o g H D L描述的异步状态机,所以用V e r i l o g 设计的时序电路应该是同步时序电路。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
LAUNCH: begin state <= ON_MISSION; launch_shuttle <= 1; end ON_MISSION: //取消使命前,一直留在使命状态 if (just_launched) start_trip_meter <= 1; else state <= ON_MISSION; LAND: if (is_landed) state <= HOLD; else begin land_shuttle <= 1; state <= LAND; end default: state = 5'bxxxxx; endcase end end //end of always endmodule
Module clk_3(clkin,reset,clkout); input clkin,reset; reg [1:0] state; reg clk1; always @(posedge clkin or negedge reset) if (!reset) state <=2’b00; else case(state) 2’b00:state<=2’b01; 2’b01:state<=2’b11; 2’b11:state<=2’b00; default:state<=2’b00; endcase always @(negedge clk or negedge reset) if (!reset) clk1<=1’b0; else clk1<=state[0]; assign clk_out=state[0]&clk1; endmodule
module fsm (Clock, Reset, A, K2, K1);
信号变量、常量声明 每一个时钟沿产生一次可能的状态变化 state 产生下一状态的组合逻辑 nextstate 产生输出K1的组合逻辑 产生输出K2的组合逻辑
endmodule
表示方法之三(续)
//-------- 每一个时钟沿产生一次可能的状态变化----------always @(posedge Clock) begin if (!Reset) state <= Idle; else state <= nextstate; end //-------------------------------------------------------
输出逻辑 当前状态 G
输出
时钟信号clk
图2. 时钟同步的状态机结构 (Moor状态机)
有限状态机FSM标准
FSM要安全,稳定性高 FSM速度高,满足设计的频率高 FSM面积小,满足设计的面积要求 FSM设计要清晰易懂、易维护
有限状态机的图形表示
• 图形表示:状态、转移、条件和逻辑开关
A/K1=0 Start !Reset /K2=0 K1=0 !Reset /K2=0 K1=0 !A
Idle
!Reset /K2=0 K1=0 Stop
(!Reset |!A )/ K2=0 K1=1
Clear
A/K2=1
图3.4
状态转移图
有限状态机HDL描述
wire、reg,状态编码用reg型 parameter 用于描述状态名称,易读;独热 码好 always:
变量和常量
endmodule
Mealy 状态机
下一个状态 = F(当前状态,输入信号); 输出信号 = G(当前状态,输入信号);
输入
下一状态 激励信号 的逻辑 F 状态 寄存器
clk 输入
当前状态
输出逻辑 G
输出
时钟信号clk
图1 . 时钟同步的状态机结构 (Mealy 状态机)
表示方法之三(续)
状态机的测试模块
always #50 clock = ~clock; //产生周期性的时钟 always @ (posedge clock) //在每次时钟正跳变沿时刻产生不同的a begin #30 a = {$random}%2; // 每次a是 0还是1是随机的。 #(3*50+12); // a 的值维持一段时间 end initial begin #100000 $stop; end //系统任务,暂停仿真以便观察仿真波形。
表示方法之三(续)
//---- 产生输出K1的组合逻辑 -------------always @(state or Reset or A) if (!Reset) K1=0; else if (state == Clear && !A) //从Clear转向 Idle K1=1; else K1= 0;
LAND
/land_shuttle=1
abort_mission
ON_MISSION LAUNCH
just_launched
/launch_shuttle=1
/start_trip_meter=1
module statemachine ( launch_shuttle, land_shuttle, start_countdown start_trip_meter, clk, all_systems_go, just_launched, is_landed, cnt, abort_mission); output launch_shuttle, land_shuttle, start_countdown; output start_trip_meter; input clk, just_launched, is_landed, abort_mission, all_systems_go input [3:0] cnt; reg launch_shuttle, land_shuttle, start_countdown, start_trip_mete //设置独热码状态的参数 parameter HOLD=5'b00001, SEQUENCE=5'b00010, LAUNCH=5'b00100, ON_MISSION=5'b01000, LAND=5'b10000; reg [4:0] state;
Clock Reset
K2
fsm
A
K1
module fsm (Clock, Reset, A, K2, K1);
信号说明,引脚
input Clock, Reset A; output K2, K1;
reg K2, K1; reg [1:0] state, nextstate ; parameter Idle = 2'b00, Start = 2'b01, Stop = 2'b10, Clear = 2'b11;
表示方法之三(续)
//------ 产生下一状态的组合逻辑 -------------------------
always @(state or A) case (state) Idle: if (A) nextstate = Start; else nextstate = Idle; Start: if (!A) nextstate = Stop; else nextstate = Start; Stop: if (A) nextstate = Clear; else nextstate = Stop; Clear: if (!A) nextstate = Idle; else nextstate = Clear; default: nextstate =2'bxx; endcase
//----------- 调用被测试模块t.m ---------fsm m(.Clock(clock), .Reset(rst),.A(a),.K2(k2),.K1(k1)); endmodule
13.2 典型状态机实例
宇宙飞船控制器
just_launched is_landed abort_mission all_systems_go
always @(negedge clk or posedge abort_mission) begin //检查异步reset的值,即abort_mission的值 if(abort_mission) {launch_shuttle, land_shuttle, start_trip_meter, start_countdown}<= 4'b0000; state<=LAND; else begin /* 主状态机,状态变量state */ case ( state ) HOLD: if (all_systems_go) begin state <= SEQUENCE; start_countdown <= 1; end else state <= HOLD; SEQUENCE: if (cnt = = 0 ) state <= LAUNCH; else state <= SEQUENCE;
state
//--- 产生输出K2的组合逻辑 --------------A Clock always @(state or Reset or A ) K2~0 always2~0 if (!Reset) K2 = 0; else K1~0 if (state == Stop && A) // 从Stop转向 Clear K2 = 1; else K2 = 0; //-----------------------------------------Stop A 0 1 Clear clk 0 0 1 0
launch_shuttle land_shuttle 宇宙飞船控制器 start_countdown start_trip_meter
clk
cnt
13.2 典型状态机实例
宇宙飞船控制器