A 机器人的手动操作
发那科机器人程序员A课程 简化
目录
5 第五章 程序的管理
2 第二章 机器人单元 3 第三章 零点复归
6 第六章 指令 7 第七章 备份/加载
4 第四章 坐标系设置
8 第八章 基本保养
9 第九章 机器人易耗品介绍
1
第一章 安全
安全操作规程
1.示教和手动机器人
1)请不要带着手套操作示教盒和操作面板。 2)在点动操作机器人时要采用较低的速度倍率以增加对机器人的控制机会。 3)在按下示教盒上的点动键之前要考虑到机器人的运动趋势。 4)要预先考虑好避让机器人的运动轨迹,并确认该线路不受干涉。
由于电气或软件问题导致丢失Mastering数据,恢复已经存入 的Mastering数据作为快速示教调试基准。若由于机械拆卸或 维修导致机器人Mastering数据丢失,则不能采取此法。
条件:在机器人正常时设置Mastering data。
33
警
如果校准操作(即CALBRATE)失败,则该轴的软限位将无效,机器
8
5、机器人的编程方式
在线编程: 围栏内
围栏外
9
离线编程:
10
6、机器人的安装环境
环境温度:0-45摄氏度; 环境湿度:普通: ≤75%RH(无露水、霜冻);
短时间:95%(一个月之内); 不应有结露现象; 振动:≤0.5G(4.9M/s2) ;
11
7、机器人的特色功能
➢ High sensitive collision detector 高性能碰撞检测机能,机器人无须外加传感器,各种场合均适用
人为 中断
2. 程序中断的原因:
ABORTED
PAUSED
(中
断
状
态
)
为 暂
1+X工业机器人选择题库+参考答案
1+X工业机器人选择题库+参考答案一、判断题(共100题,每题1分,共100分)1.机器人出厂时默认的工具坐标系原点位于第1轴中心。
A、正确B、错误正确答案:B2.行程开关可以作电源开关使用。
A、正确B、错误正确答案:B3.气管接头一般分为塑料接头和金属接头。
A、正确B、错误正确答案:A4.离线编程软件目前可完全替代手动示教编程。
A、正确B、错误正确答案:B5.ProcCall指令可以调用带参数的例行程序。
A、正确B、错误正确答案:A6.使用示教盒上的快捷键可以快速切换机器人自动/手动的工作模式。
A、正确B、错误正确答案:B7.气路连接完成,不允许出现漏接和漏气以及气管绑扎。
A、正确B、错误正确答案:B8.循环指令WHILE运行时,可能会出现死循环,在编写机器人程序使必须注意。
A、正确B、错误正确答案:A9.在工具坐标系未定义时,系统自动采用默认的工具,此时,工具坐标系与末端法兰盘处的工具坐标系重合。
A、正确B、错误正确答案:A10.程序编写完可直接自动运行。
A、正确B、错误正确答案:B11.机器人轨迹泛指机器人在运动过程中的运动轨迹,即运动点的位移、速度和加速度。
A、正确B、错误正确答案:A12.赋值指令用于对程序数据进行赋值,赋值可以是一个常量或数学表达式。
A、正确B、错误正确答案:A13.正确选用和使用低压电器元件对电器安全运行是极其重要的。
A、正确B、错误正确答案:A14.当转数计数器发生故障,修复后,必须进行转数计数器更新操作。
A、正确B、错误正确答案:A15.使用对准功能,工具可以对准的坐标系有大地坐标系、基坐标系、工具坐标系和工件坐标系。
A、正确B、错误正确答案:B16.Reset指令可以将do1信号置位结果为1。
A、正确B、错误正确答案:B17.“MoveJDOp10,v200,z50,tool0,do1,1;”表示机器人以关节移动至p10点,并设置do1为1。
A、正确B、错误正确答案:A18.通过ABB机器人控制柜上的钥匙切换开关可以选择的工作模式有手动模式、自动模式和半自动模式三种。
FANUC机器人程序员A 讲义6(第六章)

机器人信号 (RI/RO)指令,模拟信号(AI/AO)指令,群组信号 (GI/GO)指令的用法和数字信号指令类似。
33
程序案例2
三、指令
IO指令的应用实例——搬运工件
30
程序案例1 USER0
三、指令
1: PR[11]=LPOS 2: PR[12]=PR[11] 3: PR[12,1]=PR[11,1]+100 4: PR[13]=PR[12] 5: PR[13,2]=PR[12,2]+100 6: PR[14]=PR[11]
执行该行程序时,将 机思器考人:当如前以位PR置[1保3存] 至为依PR据[1,1]如中何,算并且 以PR直[1角4(]?或关节)坐标 形式显示出来。
PR[i,j]=PR[i]的第j个要素(坐标值)
LPOS(直角)
PR[2,1]=X PR[2,4]=W PR[2,2]=Y PR[2,5]=P PR[2,3]=Z PR[2,6]=R
JPOS(关节)
PR[2,1]=J1 PR[2,4]= J4 PR[2,2]=J2 PR[2,5]= J5 PR[2,3]=J3 PR[2,6]= J6
运动指令,Robot 根据以上计算得到 的位置走出轨迹。
[ END ]
31
思考题
三、指令
请用坐标计算的方式编程,让机器人画出一个 半径为100mm的圆(参考坐标为:UF0,UT1)。
r=100mm
32
三、指令
2、I/O(信号)指令 I/O I/O指令用来改变信号输出状态和接收输入信号。
T-01-O-A-工业机器人使用安全规程微课-解说词.

同学们,大家好!今天我们将一起了解ABB工业机器人使用的安全操作规程。
工业机器人系统安全使用的一般原则如下:(1)如果在保护空间内有工作人员,请手动操作机器人系统;(2)当进入保护空间时,请始终带好示教器,以便随时控制机器人;(3)注意旋转或运动的工具,例如切削工具。
确保在接近机器人之前,这些工具已经停止运动;(4)注意工件和机器人系统的高温表面。
机器人电机长期运转后温度很高;(5)注意夹具并确保夹好工件。
如果夹具打开,工件会脱落并导致人员伤害或设备损坏。
夹具非常有力,如果不按照正确方法操作,也会导致人员伤害;(6)注意液压、气压系统以及带电部件。
即使断电,这些电路上的残余电量也很危险;接下来,我们一起看看示教器的安全使用原则。
示教器是工业机器人系统的重要部件之一,它是一款高品质手持式终端,它配备高灵敏度的先进电子设备a。
为避免操作不当引起的故障或损坏,请在操作时遵循以下规则。
(1)小心搬运。
切勿摔打、抛掷或用力撞击示教器。
这样会导致破损或故障;(2)如果示教器受到撞击,始终要验证并确认其安全功能(使动装置和紧急停止)工作正常且未损坏;(3)设备不使用时,请将其置放于立式壁架(卡座)上存放,防止意外脱落;(4)使用和存放示教器时始终要确保电缆不会将人绊倒;(5)切勿使用锋利的物体(例如螺丝刀或笔尖)操作触摸屏。
这样可能会使触摸屏受损。
用您的手指或触摸笔;(6)定期清洁触摸屏。
灰尘和小颗粒可能会挡住触摸屏造成故障;(7)切勿使用溶剂、洗涤剂或擦洗海绵清洁示教器。
请使用软布醮少量水或中性清洁剂进行清洁;(8)没有连接USB 设备时务必盖上USB 端口的保护盖。
如果端口暴露到灰尘中,那么它会中断或发生故障;在因为软件错误或误用而锁定示教器的情况下,您可以使用控制杆或者使用重置按钮(位于带有USB 端口的示教器背面)解除锁定。
操作步骤如下:(1)将控制杆向右完全倾斜移动三次;(2)将控制杆向左完全倾斜移动一次;(3)将控制杆向下完全倾斜移动一次;(4)随即显示一个对话框,点击Reset(重置)按钮;即可重新启动示教器;接下来,我们看看控制柜的安全保护原则。
任务1 工业机器人手动操作基础知识

5加载工业机器人工件
选择“导入模型库”,“设备”“training object”中的curving thing, 见图,添加后工件,如图所示。
工件离机器人较远,显示工业机器人的工作区域操作方法为: 鼠标右键单击布局中的“IRB120_3_58_01”,选择“显示机器人工 作区域”,其白色空间内为机器人可达区域,如图所示。
工件不在工业机器人的工作区域,需设置curving thing的位置, 其操作方法为:鼠标右键单击curving thing,选择设定位置,如图411所示。在弹出的对话框中设置其合适位置,设定完毕后,点击应 用,再点击关闭。
注意:设定位置时,以大地坐标为参考坐标,坐标原点在机身 底座的中心,xyz方向以图箭头所指示。至此一个最小的工业机器 人仿真系统建立完成,如图所示。
转化为手动模式后,点击左上角主菜单,如图所示
在弹出的如图所示的对话框中,点击“控制面板”。
在弹出的如图所示的对话框中,点击“语言”菜单, 从如图所示的界面中选择想要更改的语言
点击“确定”后,在弹出的“重启 FlexPendant”对话框中点击“是”,重启后生效。
1单轴运动
点击左上角主菜单,点击手动操纵,点击“Enable”,如图 4-35所示使使能器工作,变为绿色后机器人将处于电机开启 状态。
6.创建控制系统
在“基本”功能选项卡,单击“机器人系统”的“ 从布局”, 如图所示。
设定好系统名称和位置,注意路径建议不要出现中文,选 择RobotWare(如果安装有多个,选择对应的RobotWare版 本),单击“下一个”, 如图所示。
单击“选项”,如图所示。
在弹出如图所示的对 话框中,作以下修改:
“840-2 PROFIBUS Anybus Device”。
示教器按键功能.doc
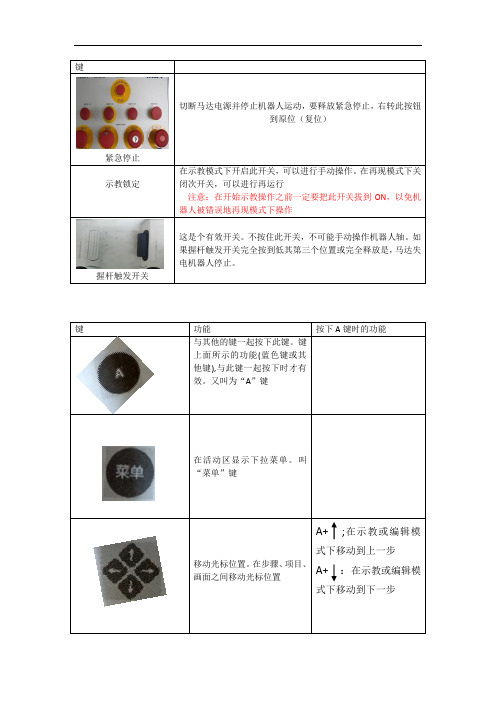
注册输入数据
每按一次,切换活动画面。称为“画面切换”
关闭当前活动监控画面。称为“关闭”
使机器人在hoid(暂停)状态称为“暂停”键
使机器人在运转状态,、。称为“运转”键
“A”+夹紧n+数字(1~8)同时切换夹紧命令信号数据和指定夹紧编号的实际夹紧信号:ON—OFF—ON
运动从JT1到JT7的名轴。称为“轴”
输入“.”
输入“-”
输入“0”
输入“,”
输入“1”
把指定的实际的夹紧强制为ON。称为“ON”键
输入“2”
把指定的实际的夹紧强制为OFF。称为“OFF”键
输入“3”
在辅助0807的[前进后退连续模式=设定为[无效=并检查模式设定为[检查单步=时,进入下一步
在检测模式下退回下一步。。称为“检查后退”键
在辅助0807的[前进后退连续模式=设定为[无效=并检查模式设定为[检查单步=时,退回下一步
设定手动和检查操作的速度。称为“手动速度”键。每按下此键切换速度
如下;1-2-3-4-5-1
在一体化示教中,显示工具命令数据的输入画面。称为“工具”键
显示/隐藏接口画面。按下此键不会其他画面。称为“接口画面切换”键
在一体化示教中,显示CC命令数据的输入画面。称为“CC”键
直接指定KI命令编号。称为“KIn”键
在一体化示教中,显示工具命令数据的输入画面。称为“工件”键
激活程序编辑功能。(选择一体化示教画面以外的画面,例如:AS语言示数,位置示教,程序编辑画面。)称为“I”键
插入在程序中新的步骤。称为“插入”键
删除已注册的程序。称为“删除”键
编辑辅助数据。称为“辅助修正”键
工业机器人模拟练习题(附参考答案)

工业机器人模拟练习题(附参考答案)一、判断题(共100题,每题1分,共100分)1.视觉获得的感知信息占人对外界感知信息的 60%。
A、正确B、错误正确答案:B2.顺序控制编程的主要优点是成本低易于控制和操作。
A、正确B、错误正确答案:A3.工业机器人按照自由度分类,可分为一、二、三、四、五、六和冗余自由度机器人。
( )A、正确B、错误正确答案:B4.气压传动传动平稳,可以传递很大的力和转矩。
( )A、正确B、错误正确答案:B5.( ) 当工件位置发生改变的时候, 可以通过工件坐标的重新定义即可却表机器人的正常运行。
A、正确B、错误正确答案:A6.用传感器采集环境信息是机器人智能化的第一步。
A、正确B、错误正确答案:A7.电位器式位移传感器,随着光电编码器的价格降低而逐渐被取代。
( )A、正确B、错误正确答案:A8.开关电源大致由主电路、控制电路、检测电路三大部份组成。
( )A、正确B、错误正确答案:B9.O 型密封圈对被密封表面的粗糙度要求很高。
( )A、正确B、错误正确答案:B10.机器人控制系统按其控制方式可分为集中控制系统、主从控制系统和分散控制系统三类。
( )A、正确B、错误正确答案:A11.( ) 在 ABB 工业机器人的程序结构中, 有效载荷的英文标识是loadtada。
A、正确B、错误正确答案:A12.工业机器人的关机方法是通过示教器按步骤关。
A、正确B、错误正确答案:A13.sm×电池代表的意思是断电保护电池。
A、正确B、错误正确答案:B14.安装面应光滑无毛刺、磕碰、变形, 安装面之间充分接触可更好传递扭矩,避免受力不均引起抖动。
( )A、正确B、错误正确答案:A15.RV 减速器的装配注意事项:涂抹密封胶时, 应尽可能多用, 以免密封不良。
( )A、正确B、错误正确答案:B16.( ) 工业机器人的供电电缆属于电力电缆。
A、正确B、错误正确答案:A17.三段开关操作前把模式旋钮设置在示教模式, 即使此时不按下手持操作示教器上伺服准备键,只要轻握三段开关,伺服电源也可以接通。
机器人的基本控制方法

c、自然约束:vx= 0 vy= 0ωx= 0 ωy= 0 fz= 0τz = 0 人为约束: vz=vc ωz= 0 fx= 0 fy= 0 τx = 0τy= 0 Vc为销子插入孔中的速度
自然约束发生变化的情况总是通过对一些量的
01
检测发现的.而检测量并不是受控量; 手部的位置控制是沿着有自然力约束的方向; 手部的力控制是沿着有自然位置约束的方向。
位置约束可以用手端在约束坐标系中的位置分最表示 V = vx vy vz ωx ωy ωz T 力约束可以用手端在约束坐标中的力、力矩分量表示 F = fx fy fz τx τy τz T 自然约束 力:在切线方向上 位置:在法线方向 人为约束 力:在法线方向 以保证与自然约束相符 位置:在切线方向上
02
三、作业约束与力控制的总结
顺应控制(Appliance Control) 分为 主动式顺应控制 被动式顺应控制
五、刚性控制(Robust Control) 位置和力混合控制系统的特点: 是位置和力是独立控制的以及控制规律是以关节坐标给出的。但当作业环境的约束给出后,在实际环境约束中有不确定的部分,就可能出现控制不稳定的危险。例如,在理应有约束的方向上没有约束时,由于按照作用力保持一定进行控制,就有失控的危险;在理应没有约束的方向上出现了约束时,由于位置控制而产生过大的力。刚性控制就是为了解决此类问题而产生的。刚性控制是将位置和力联合起来进行控制,即在纯粹的位置控制和力控制之问采用能实现弹簧特性的控制,并用作业坐标系表示控制规律。
06
三、PUMA-562 控制器软件系统的工作原理(Software) PUMA-562 控制器软件 上位机软件:系统编程软件 下位机软件:伺服软件 系统软件提供软件系统的各种系统定义、命令、语言及其编译系统。系统软件针对各种运动形式的轨迹规划,坐标变换,完成以28ms时间间隔的轨迹插补点的计算、与下位机的信息交换、执行用户编写的VAL语言机器人作业控制程序、示教盒信息处理、机器人标定、故障 检测及异常保护等。 PUMA-562 控制系统下位机软件驻留在下位单片机的EPROM中。伺服控制关节的运动。PUMA机器人仍然采用PID控制。
2.4ABB工业机器人的手动操作

增量模式操作步骤: 第1步:在ABB主菜单下,点击增量
第2步:其中增量对应位移的及角度的大小见表2-9,根据需要 选择增量模式的移动距离,大小
增量
小 中 大 用户
移动距离 /mm 0.05
角度/(︒) 0.005
1
0.02
5
0.2
自定义
自定义
2.4.3重定位操作 机器人的重定位运动是指机器人第6轴法兰盘上的工具TCP点在
第6步:操作示教器上的操作杆,机器人绕着工具TCP 点作姿态调整的运动,操作杆方向栏中X、Y、Z的箭 头方向代表各个坐标轴运动的正方向。
第3步:点击坐标系。
2.4.4手动快捷按钮的使用 手动快捷按钮可实现机器人/外轴的切换;线性运动/复位 位运动的切换;关节运动1-3轴/4-6轴的切换及增量开和 关的功能,在机器人操作和编程过程中频繁使用,手动 快捷按钮如图2-11所示。
其中操作杆方向栏的箭头和数字代表各个轴的运动时的正方向
2.4.2线性运动的手动操作 工业机器人的线性运动是指安装在机器人第6轴法兰盘 上工具的TCP在空间中作线性运动。坐标线性运动时要指 定坐标系、工具坐标、工件坐标。坐标系包括大地坐标、 基坐标、工具坐标、工件坐标。工具坐标指定了TCP点位 置、坐标系指定了TCP点在哪个坐标系中运行。工件坐标 指定TCP点在哪个工件坐标系中运行,当坐标系选择了工 件坐标时,工件坐标才生效。 线性运动手动操作步骤:
第1步:单击ABB主菜单下拉菜单中的手动操作
第2步:点击动作模式,选择线性方式。
第3步: 选择工具坐标系 “tool0”(这里我们用的是系统 自带的工具坐标,关于工具坐标的建立请第四章),电 机上电
第4步:操作示教器上的操作杆,工具坐标TCP点在空 间做线性运动,操作杆方向栏中X、Y、Z的箭头方向 代表各个坐标轴运动的正方向。
FANUC机器人程序员A-讲义6(第六章)
程序案例1 USER0
三、指令
1: PR[11]=LPOS 2: PR[12]=PR[11] 3: PR[12,1]=PR[11,1]+100 4: PR[13]=PR[12] 5: PR[13,2]=PR[12,2]+100 6: PR[14]=PR[11]
执行该行程序时,将 机思器考人:当如前以位PR置[1保3存] 至为依PR据[1,1]如中何,算并且 以PR直[1角4(]?或关节)坐标 形式显示出来。
回转动作
遇到奇异点会发出 MOTN-023报警
速度单位用: deg/sec
13
C(圆弧动作):进行轨迹控制/姿势控制 圆弧动作
三、指令
遇到奇异点会发 出MOTN-023报警
速度单位用: mm/sec,cm/m位置信息
@:Robot就位标记
三、指令
位置信息(目的点)
P[i]: 位置变量——局部变量 i=1~1500
三、指令
$WAITTMOUT=n
设置超时时间:n*10msec
程序员A课程
— —指令
2019年9月7日星期六
上海发那科机器人有限公司
第六章 指令
一、程序编辑界面 二、指令的编辑 三、指令
2
存储器剩余容量
一、编辑界面
程序名称
程序一览画面
属性
3
当前执行的程序及执行行号 当前编 辑的程 序名
程序指令
一、编辑界面
程序运行状态
速度倍率
示教坐标系
程序结 束标记
程序编辑画面
2:L P[1] 2000mm/sec CNT50
3:SELECT R[1] =1,CALL JOB1
5:
=2,CALL JOB2
机器人试题库(带答案)

机器人属于哪个(C)A.美国B中国C瑞典D日本2.机器人控制柜发生火灾,用何种灭火方式合适(B)A.浇水B二氧化碳灭火器C泡沫灭火器D毛毯扑打3.在何处找到机器人的序列号(B)A控制柜名牌B示教器C操作面板D驱动板机器人的额定电压是多少DA24v B36v C110v D380v5.安川机器人属于哪个(A)A日本C挪威C俄罗斯D美国可以允许有几个主程序main(A)A一B二C三D四7.在哪个窗口可以改变操作时的工具(B)A程序编辑器B手动操作C输入输出D其它窗口8.哪条指令用来等待数字输入信号(A)A WaitDiB WaitDoC DiWaitD WaitTime9.精确到达工作点用那个zone(D)A z1B z50C z100DFine10.哪个zone可获得最圆滑路径(D)A z1B Z5Cz10D z10011.哪个指令可最方便回到六轴的校准位置(C)AMoveL BMoveJ CMoveAbsJ DArcL12.机器人速度是那个单位(C)min min sec sec13.哪条指令将数字输出信号置1 (C)A SetB ResetC SetAOD PulseDo14.用何功能保存模块(B)A程序另存为B另存模块为C另存工具为D系统另存为15.在哪个窗口可以定义机器人输入输出(C )A 程序编辑器B 手动操作C 输入输出D 控制面板16.在哪个窗口可以标定机器人的零位(C )A程序编辑器 B 手动操作 C 校准 D 控制面板17.在哪个窗口可以看到故障信息(C )A 程序数据B 控制面板C 事件日志D 系统信息18.在急停解除后,在何处复位可以使电机上电(A )A控制柜白色按钮 B 示教器 C 控制柜部 D 机器人本体19.机器人手动操作时,示教使能器要一直按住(√)20机器人四大家族是发那科,安川电机,abb ,酷卡(√)21机器人工作时,工作围可以站人(X )22机器人不用定期保养(X )23机器人可以做搬运,焊接,打磨等项目(√)24机器人可以有六轴以上(√)25程序模块只能有一个(X )26对机器人进行示教时, 作为示教人员必须事先接受过专门的培训才行. 与示教作业人员一起进行作业的监护人员, 处在机器人可动围外时,(B),可进行共同作业。
供排水机器人使用方法

供排水机器人使用方法
供排水机器人的使用方法主要包括以下步骤:
1. 机器人下井:设备下井时,应避免车体尾部线缆与井口、管壁发生摩擦导致线缆破损,线缆不能强拉硬拽。
在爬行器使用时要套上过线滑轮,用于保护线缆。
2. 机器人充气:爬行器车体打压充气,充气时需注视控制屏气压值,正常充气压值保持在之间,不宜过高或过低。
无水或管内积水不多可根据实际情况无需充气使用。
3. 机器人拍摄:拍摄过程中,如遇坑洼泥泞,管道脱节等爬行器无法继续向前时,必须停止向前,以免爬行器卡入井内无法取出。
拍摄过程中,升降架抬高时,避免与管壁进行摩擦,损坏车体(升降架齿轮、电机)及其他部件损坏。
每拍摄一段视频的间隙,需停顿数3-5秒,至片尾画面结束,避免主控电脑出现卡屏死机现象。
4. 清理保养:每次施工完毕后需对爬行器车体进行清理,需用湿毛巾或清水对设备表面进行擦拭,并用刮刀剔除镜头夹缝中的积泥砂石,以免影响镜头转动。
接头处要及时使用酒精消毒去氧化,防止航插头、连接器处氧化导致设备无法登录。
以上步骤仅供参考,具体操作可能因机器人型号和功能而有所不同。
建议参考机器人使用说明书或咨询专业技术人员以确保安全和效果。
机器人题库(带答案)
机器人题库〔带答案1.abb机器人属于哪个国家?〔CA.美国B中国C瑞典D日本2.机器人控制柜发生火灾,用何种灭火方式合适?〔BA.浇水B二氧化碳灭火器C泡沫灭火器D毛毯扑打3.在何处找到机器人的序列号?〔BA控制柜名牌B示教器C操作面板D驱动板4.abb机器人的额定电压是多少?DA24vB36v C110v D380v5.安川机器人属于哪个国家?〔AA日本C挪威C俄罗斯D美国6.abb可以允许有几个主程序main〔AA一B二C三D四7.在哪个窗口可以改变操作时的工具〔BA程序编辑器B手动操作C输入输出D其它窗口8.哪条指令用来等待数字输入信号〔A AWaitDiBWaitDoCDiWaitDWaitTime9.精确到达工作点用那个zone〔DAz1Bz50Cz100DFine10.哪个zone可获得最圆滑路径〔DAz1BZ5Cz10Dz10011.哪个指令可最方便回到六轴的校准位置?〔CAMoveL BMoveJ CMoveAbsJ DArcL12.机器人速度是那个单位〔C?A.cm/minB.in/minC.mm/secD.in/sec13.哪条指令将数字输出信号置1 〔CA SetB ResetC SetAOD PulseDo14.用何功能保存模块〔 BA 程序另存为B另存模块为C另存工具为D系统另存为15.在哪个窗口可以定义机器人输入输出〔CA 程序编辑器B 手动操作C 输入输出D 控制面板16.在哪个窗口可以标定机器人的零位〔CA程序编辑器 B 手动操作 C 校准 D 控制面板17.在哪个窗口可以看到故障信息〔CA 程序数据B 控制面板C 事件日志D 系统信息18.在急停解除后,在何处复位可以使电机上电〔AA控制柜白色按钮 B 示教器 C 控制柜内部 D 机器人本体19.机器人手动操作时,示教使能器要一直按住〔√20机器人四大家族是发那科,安川电机,abb ,酷卡〔√21机器人工作时,工作范围可以站人〔X22机器人不用定期保养〔X23机器人可以做搬运,焊接,打磨等项目〔√24机器人可以有六轴以上〔√25程序模块只能有一个〔X26对机器人进行示教时, 作为示教人员必须事先接受过专门的培训才行. 与示教作业人员一起进行作业的监护人员, 处在机器人可动范围外时,〔B,可进行共同作业。
Epson RC700-A 机器人控制器操作手册说明书
Controlador de robot Unidad de control RC700RC700-AUnidad de mando RC700DURC700DU-ASoftware de programación EPSON RC+7.0Manipulador Serie G1 G3 G6 G10 G20Serie RSSerie C4, C8, C12Serie N2, N6Serie X5CPD-60430Sistema de robot Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24Sistema de robot Seguridad e instalación(RC700 / EPSON RC+7.0)Mod. 24Copyright 2012-2020 SEIKO EPSON CORPORATION. Todos los derechos reservados. Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24iPRÓLOGOGracias por comprar nuestros productos de robot.Este manual contiene la información necesaria para el uso correcto del sistema derobot.Lea atentamente este manual y otros manuales relacionados antes de instalar elsistema de robot.Mantenga este manual a la mano para un acceso fácil en todo momento. GARANTÍAEl sistema de robot y las piezas opcionales se envían a nuestros clientes solo despuésde haberlos sometido a los más estrictos controles, pruebas e inspecciones de calidadpara certificar que cumplen con nuestras altas normas de rendimiento.Los productos que tengan un mal funcionamiento como resultado de lamanipulación u operación normales se repararán en forma gratuita durante elperíodo normal de la garantía. (Comuníquese con el proveedor de su región paraobtener información sobre el período de garantía).Sin embargo, se cobrarán al cliente las reparaciones en los siguientes casos (aunquesucedan dentro del período de garantía):1.Daño o mal funcionamiento provocados por un uso inadecuado que no sedescribe en este manual o por uso descuidado.2.Mal funcionamiento provocado por el desmontaje no autorizado delproducto por parte de los clientes.3.Daños debido a ajustes inadecuados o a intentos de reparación noautorizados.4.Daño provocado por desastres naturales, como terremotos, inundaciones,etc.Advertencias, precauciones, uso:1.Si el equipo asociado al sistema de robot no se usa de acuerdo con lascondiciones de uso y las especificaciones del producto descritas en losmanuales, esta garantía queda nula.2.Si no sigue las ADVERTENCIAS y PRECAUCIONES de este manual, nopodemos hacernos responsables de ningún mal funcionamiento o accidente,incluso si tienen como resultado lesiones o la muerte.3.No podemos prever todos los posibles peligros y consecuencias. Por lotanto, este manual no puede advertir al usuario de todos los posiblespeligros.ii Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24MARCAS COMERCIALESMicrosoft, Windows y el logotipo de Windows son marcas registradas o marcascomerciales de Microsoft Corporation en los Estados Unidos y otros países. Otrasmarcas y nombres de productos son marcas comerciales o marcas registradas de susrespectivos titulares.NOTACIÓN DE MARCAS COMERCIALES EN ESTE MANUAL Sistema operativo Microsoft® Windows® 8Sistema operativo Microsoft® Windows® 10En todo este manual, Windows 8 y Windows 10 se refieren a los respectivos sistemasoperativos ya citados. En algunos casos, Windows se refiere en forma genérica aWindows 8 y Windows 10.AVISONinguna parte de este manual se puede copiar o reproducir sin autorización.El contenido de este manual está sujeto a cambios sin previo aviso.Notifíquenos si encuentra errores en este manual o si tiene comentarios con respectoa su contenido.FABRICANTESeiko Epson Corporation3-3-5 Owa, Suwa-shi, Nagano, 392-8502URL:/company/: http://www.epson.jp/prod/robots/Toyoshina PlantRobotics Solutions Operations Division6925 Toyoshina Tazawa,Azumino-shi, Nagano, 399-8285JapónTEL.: +81-(0)263-72-1530FAX: +81-(0)263-72-1685Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24iiiPROVEEDORES (País/Región)América del Nortey del Sur Epson America, Inc.Factory Automation/Robotics18300 Central AvenueCarson, CA 90746EE.UU.TEL.: +1-562-290-5910 FAX: +1-562-290-5999 CORREOELECTRÓNICO:*****************.comEuropa Epson Deutschland GmbHRobotic SolutionsOtto-Hahn-Str.4D-40670 MeerbuschAlemaniaTEL.: +49-(0)-2159-538-1800FAX: +49-(0)-2159-538-3170CORREOELECTRÓNICO:****************URL:: www.epson.de/robotsChina Epson (China) Co., Ltd.Factory Automation Division4F, Tower 1, China Central Place,81 Jianguo Road, Chaoyang District,Beijing, 100025, PRCTEL.: +86-(0)-10-8522-1199FAX: +86-(0)-10-8522-1125Taiwán Epson Taiwan Technology & Trading Ltd.Factory Automation Division15F., No.100, Song Ren Road., Xinyi Dist., Taipei City, 11073TaiwánTEL.: +886-(0)-2-8786-6688FAX: +886-(0)-2-8786-6600iv Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24Corea Epson Korea Co., Ltd.Marketing Team (Robot Business)10F Posco Tower, Teheranro 134(Yeoksam-dong)Gangnam-gu, Seoul, 06235CoreaTEL.: +82-(0)-2-3420-6632FAX: +82-(0)-2-558-4271Sudeste Asiático Epson Singapore Pte. Ltd.Factory Automation System1 HarbourFront Place, #03-02,HarbourFront Tower One,Singapur 098633TEL.: +65-(0)-6586-5500FAX: +65-(0)-6271-2703India Epson India Pvt. Ltd.Sales & Marketing (Factory Automation)12th Floor, The Millenia, Tower A, No. 1,Murphy Road, Ulsoor, Bangalore,India 560008TEL.: +91-80-4566-5000FAX: +91-80-4566-5005Japón Epson Sales Japan CorporationFactory Automation Systems Department29th floor, JR Shinjuku Miraina Tower, 4-1-6Shinjuku, Shinjuku-ku, Tokyo 160-8801JapónTEL.:+81-(0)3-5919-5257FAX:+81-(0)3-5919-5402Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24vEn relación con la eliminación de la bateríaLa etiqueta con el basurero con ruedas tachado que se puede encontrar en el producto indica que este producto y las baterías incorporadas no se deben eliminar en el flujo normal de desechos domésticos. Para evitar los posibles daños ambientales o a la salud humana, separe este producto y las baterías de otros flujos de desechos para garantizar que se puedan reciclar de una manera ambientalmente correcta. Para conocer más detalles acerca de las instalaciones de recolección, comuníquese con la oficina gubernamental local o con el vendedor minorista donde compró este producto. El uso de los símbolos químicos Pb, Cd o Hg indica si estos metales se usan en la batería.Esta información solo se aplica a los clientes de la Unión Europea, de acuerdo con la DIRECTIVA 2006/66/CE DEL PARLAMENTO EUROPEO Y DEL CONSEJO DEL 6 de septiembre de 2006 acerca de las baterías y acumuladores y de las baterías y acumuladores de desecho y por la que se deroga la Directiva 91/157/CEE y la legislación, la cual se transpone e implementa en diversos sistemas legales nacionales.Para otros países, comuníquese con su gobierno local para investigar la posibilidad de reciclar su producto.El procedimiento de retiro y reemplazo de la batería se describe en los siguientes manuales: Manual del controlador / Manual del manipulador(sección Mantenimiento)Solo para clientes de CaliforniaLas baterías de litio de este producto contienenMaterial de perclorato: Se pueden aplicar procedimientos de manipulación especiales. Consulte la página /hazardouswaste/perchlorate (solo disponible en inglés.vi Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24viiAntes de leer este manualCon respecto a la compatibilidad de seguridad para la conexión de red:La función de conexión de red (Ethernet) de nuestros productos supone el uso en la red local, como la red LAN de la fábrica. No la conecte a la red externa, como Internet.Además, tome medidas de seguridad, como contra virus de la conexión de red, mediante la instalación de un software antivirus.Compatibilidad de seguridad para la memoria USB: Asegúrese de que la memoria USB no esté infectada con virus cuando se conecte al controlador.Configuración de sistema de controlLa unidad de mando RC700DU del controlador de robot está disponible para la siguiente versión.EPSON RC+ 7.0 Ver. 7.1.0 o posteriorControlador de robot RC700-ALa unidad de mando RC700DU-A del controlador de robot está disponible para la siguiente versión.EPSON RC+ 7.0 Ver. 7.1.2 o posteriorLos manipuladores se pueden conectar con las siguientes versiones. Serie C4 : EPSON RC+ 7.0 Ver.7.0.0 Serie C8 (C8XL) : EPSON RC+ 7.0 Ver.7.1.3 Serie C8(C8, C8L) : EPSON RC+7.0 Ver.7.1.4Serie C8 (montaje en pared) : EPSON RC+ 7.0 Ver.7.2.0 Serie C12 : EPSON RC+ 7.0 Ver.7.4.6 Serie N2: EPSON RC+ 7.0 Ver.7.2.0 Serie N6 (N6-A1000**) : EPSON RC+ 7.0 Ver.7.3.4 Serie N6 (N6-A850**R) : EPSON RC+ 7.0 Ver.7.4.1Serie G1, G3, G6, G10, G20, RS : EPSON RC+ 7.0 Ver.7.1.2 Serie X5: EPSON RC+ 7.0 Ver.7.3.0☞NOTA☞NOTARoHS de ChinaEsta hoja y etiqueta de período de uso de protección ambiental se basan enel reglamento de China. No es necesario preocuparse por esto en otros países. viii Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24产品环保使用期限的使用条件关于适用于在中华人民共和国境内销售的本产品的环保使用期限,在遵守该产品的安全及使用注意事项的条件下,从生产日期开始计算,在标志的年限内,本产品中含有的有害物质不会对环境造成严重污染或对人身、财产造成严重损害。
机器人操作规程
机器人操作规程
《机器人操作规程》
在现代社会中,机器人已经逐渐成为生产和服务领域中不可或缺的一部分。
然而,机器人在操作过程中需要遵循一定的规程,以确保安全和高效的工作。
以下是机器人操作规程的一些重要内容:
1. 操作人员必须接受专业的培训,了解如何正确地操作和维护机器人。
他们必须熟悉机器人的工作原理和操作界面,并且了解在遇到问题时应该如何应对。
2. 在操作机器人之前,必须进行全面的安全检查。
确保机器人的各个部件都处于良好的状态,并且没有损坏或松动的部件。
3. 在进行复杂或危险的操作时,必须配备专业的操作人员。
这些操作人员必须具有丰富的经验和技能,以确保机器人可以安全地完成任务。
4. 机器人的操作必须符合相关的法律法规和标准,包括安全规定、环保要求等。
在操作过程中,必须遵循相关的安全操作规程,以保障员工和环境的安全。
5. 在操作机器人时,必须随时注意机器人的运行状态,并及时发现并解决可能出现的问题。
一旦发现机器人运行异常,必须立即停止操作并进行维修。
总之,机器人操作规程是确保机器人安全和高效运行的重要保障。
只有严格遵守规程,我们才能发挥机器人的最大潜力,为人类社会的发展做出更大的贡献。
工业机器人习题(附参考答案)
工业机器人习题(附参考答案)一、判断题(共100题,每题1分,共100分)1、顺序控制编程的主要优点是成本低、易于控制和操作。
A、正确B、错误正确答案:A2、工业机器人控制软件可以用任何语言来编制。
( )A、正确B、错误正确答案:B3、关节 i 的坐标系放在 i-1 关节的末端。
( )A、正确B、错误正确答案:B4、tool0 的参数可以随意修改A、正确B、错误正确答案:B5、( ) 更换了 smb 电池情况下, 需要进行“更新转数计数器”操作。
A、正确B、错误正确答案:A6、工业机器人控制装置一般由一台微型或小型计算机及相应的接口组成。
A、正确B、错误正确答案:A7、lo √dd √t √代表的含义是工具数据A、正确B、错误正确答案:B8、( ) 增量的大小通过控制柜进行设置。
A、正确B、错误正确答案:B9、变压器中的铁芯材料是硅钢,使用该材料的目的是为了防止涡流。
A、正确B、错误正确答案:A10、万用表的使用时, 交直流电流的测量:将量程开关拨至 DCA (直流)或 ACA (交流)的合适量程,黑表笔插入 mA 孔(<200mA 时)或 10A 孔(>200mA 时),红表笔插入 COM 孔,并将万用表串联在被测电路中即可。
测量直流量时, 数字万用表能自动显示极性。
( )A、正确B、错误正确答案:B11、在示教模式下, 可用手持操作示教器进行轴操作和程序编辑。
在此模式中,外部设备发出的工作信号有效。
( )A、正确B、错误正确答案:B12、末端执行器按照用途和结构不同,分为机械式夹持器、吸附式执行器等 2 类。
( )A、正确B、错误正确答案:B13、控制系统是软件主要包括运动轨迹规划算法和关节伺服控制算法等动作程序。
( )A、正确B、错误正确答案:A14、sm×电池应该在电池电力即将耗尽时更换。
A、正确B、错误正确答案:A15、( ) 机器人机座可分为固定式和履带式两种。
工业机器人模拟测试试题及答案

工业机器人模拟测试试题及答案1、manipulator的中文是()。
(A)手动操作(B)人工设定(C)操纵机、操作者(D)以上都不是2、机器人的英文单词是()。
(A)Rob (B)Robot (C)Rabbit (D)Robert3、下列尺寸正确标注的图形是()Word文档 14、下列不是常说的气动三联件中的组成部分的是()。
(A)空气过滤器(B)干燥器(C)减压阀(D)油雾器5、减压阀控制的是()处的压力。
(A)进油口(B)出油口(C)A和B都不是6、视觉弧焊机器人的系统硬件不包含()。
(A)机器人系统(B)视觉系统(C)检测系统(D)焊接系统7、下列关于测量与误差分析内容说法不正确的是()(A)测量单位是人为定义的,有任意性。
(B)电位差计测电动势是直接测量。
Word文档 2(C)偏差法是工程上应用最广泛的测量方法。
(D)用光电转速表测量转速是接触测量法。
8、电气控制线路图测绘的一般步骤是设备停电,先画(),再画电器接线图,最后画出电气原理图。
(A)电机位置图(B)设备外形图(C)电器布置图(D)开关布置图9、下列关于电气线路识图说法不正确的是()(A)电路原理图不涉及安装位置和实际配线方法。
(B)电路原理图一般分为电源电路、主电路和辅助电路三部分。
(C)主电路原理图是指受电的动力装置及控制、保护电路支路。
(D)电气接线图主要用于安装接线、线路检查和故障处理。
10、1度电可供“220V40W”的灯泡正常发光时间是()。
(A)20h (B)40h (C)45h (D)25hWord文档 311、三相对称电路是指()。
(A)三相电源对称的电路(B)三相负载对称的电路(C)三相电源和三相负载均对称的电路(D)以上都不是12、RS232接口是一种标准的串行接口,其通讯距离小于(),传输速率小于20kb/s。
(A)150m (B)50m (C)15m (D)5m13、限位开关在电路中起的作用是()。
(A)短路保护(B)过载保护(C)欠压保护(D)行程控制14、PLC输出模块出现故障可能是( )造成的。
ABB机器人的手动操作

A B B机器人的手动操作 Revised by Petrel at 2021ABB[a]/-J-3ABB机器人的手动操作任务目标➢掌握手动操作机器人运动的三种模式。
➢使用“增量”模式来控制机器人的运动。
➢熟练使用手动操纵的快捷方式。
➢掌握ABB机器人转数计数器更新操作。
任务描述手动操纵机器人运动一共有三种模式:单轴运动、线性运动和重定位运动。
如何使用这三种模式手动操作机器人运动是项目的主要内容。
建立一个工作站,ABB型号为IRB120,Y轴上建模长方体,长200mm,宽200mm,高400mm,在长方体的内角上进行重定位运动,之后恢复到机械远点。
(手动操作练习需要教师指导,同时需要上机练习)知识储备1.单轴运动一般地,ABB机器人是由六个伺服电动机分别驱动机器人的六个关节轴,那么每次手动操纵一个关节轴的运动,就称之为单轴运动。
图2 IRB 120机器人的关节轴2.线性运动机器人的线性运动是指安装在机器人第六轴法兰盘上工具的TCP在空间中作线性运动。
3.重定位运动机器人的重定位运动是指机器人第六轴法兰盘上的工具TCP点在空间中绕着坐标轴旋转的运动,也可以理解为机器人绕着工具TCP点作姿态调整的运动。
中的建模功能当使用RobotStudio进行机器人的仿真验证时,如节拍、到达能力等,如果对周边模型要求不是非常细致的表述时,可以用简单的等同实际大小的基本模型进行代替,从而节约仿真验证的时间。
如果需要精细的3D模型,可以通过第三方的建模软件进行建模,并通过*.sat格式导入到RobotStudio中来完成建模布局的工作。
1.使用RobotStudio建模功能进行3D模型的创建2.对3D模型进行相关设置任务实施单轴运动的手动操纵1. 将控制柜上机器人状态钥匙切换到中间的手动限速状态。
2. 在状态栏中,确认机器人的状态已切换为“手动”。
3. ABB 菜单中,选择“手动操纵”。
4. 单击“动作模式”。
5. 选中“轴1-3”,然后单击“确定”(选中“轴4-6”,就可以操纵轴4-6)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ABB[a]/-J-3ABB机器人的手动操作
3.1任务目标
➢掌握手动操作机器人运动的三种模式。
➢使用“增量”模式来控制机器人的运动。
➢熟练使用手动操纵的快捷方式。
➢掌握ABB机器人转数计数器更新操作。
3.2任务描述
手动操纵机器人运动一共有三种模式:单轴运动、线性运动和重定位运动。
如何使用这三种模式手动操作机器人运动是项目的主要内容。
建立一个工作站,ABB型号为IRB120,Y轴上建模长方体,长200mm,宽200mm,高400mm,在长方体的内角上进行重定位运动,之后恢复到机械远点。
(手动操作练习需要教师指导,同时需要上机练习)
3.3知识储备
1.单轴运动
一般地,ABB机器人是由六个伺服电动机分别驱动机器人的六个关节轴,那么每次手动操纵一个关节轴的运动,就称之为单轴运动。
图2 IRB 120机器人的关节轴
2.线性运动
机器人的线性运动是指安装在机器人第六轴法兰盘上工具的TCP在空间中作线性运动。
3.重定位运动
机器人的重定位运动是指机器人第六轴法兰盘上的工具TCP点在空间中绕着坐标轴旋转的运动,也可以理解为机器人绕着工具TCP点作姿态调整的运动。
3.3.2RobotStudio中的建模功能
当使用RobotStudio进行机器人的仿真验证时,如节拍、到达能力等,如果对周边模型要求不是非常细致的表述时,可以用简单的等同实际大小的基本模型进行代替,从而节约仿真验证的时间。
如果需要精细的3D模型,可以通过第三方的建模软件进行建模,并通过*.sat格式导入到RobotStudio中来完成建模布局的工作。
1.使用RobotStudio建模功能进行3D模型的创建
1. 单击“新建”菜单命令组,创建
一个新的空工作站。
2. 在“建模”功能选项卡中,单击
“创建”组中的“固体”菜单,选择“矩形体”。
3. 按照垛板的数据进行参数输
入,长度1190mm ,宽度800mm ,高度140mm ,然后单击“创建”。
2.对3D 模型进行相关设置
1. 在刚创建的对象上单击右
键,在弹出的快捷菜单中可以进行颜色、移动、显示等相关的设定。
2. 在对象设置完成后,单击
“导出几何体”,就可以将对象进行保存。
3.4任务实施
3.4.1单轴运动的手动操纵
1. 将控制柜上机
器人状态钥匙切换到中间的手动限速状态。
2. 在状态栏中,确
认机器人的状态已切换为“手动”。
3. ABB 菜单中,选择“手动操纵”。
电源总开关
急停开关 机器人状态
通电\复位
3.4.2线性运动
3.4.3重定位运动
3.4.4增量模式控制机器人运动
如果对使用操纵杆通过位移幅度来控制机器人运动的速度不熟练的话。
那么可以使用“增量”模式来控制机器人的运动。
在增量模式下,操纵杆每位移一次,机器人就移动一步。
如果操纵杆持续一秒或数秒钟,机器人就会持续移动(速率为10步/s)。
2. 根据需要选择增量的移动距
离,然后单击“确定”。
增量
移动距离 Mm
角度 ° 小 0.05 0.005 中 1 0.02 大 5 0.2 用户 自定义
自定义
3.5知识链接
3.5.1手动操纵的快捷方式 1.手动操纵的快捷按钮
标号 说明
A 机器人/外轴的切换
B 线性运动/重定位运动的切换
C 关节运动轴1-3/轴4-6的切换
D
增量开/关
2.手动操纵的快捷菜单 1. 单击此快捷菜单按
钮。
2. 单击“手动操纵”按
钮。
A B C D
3.5.2ABB机器人转数计数器更新操作
ABB机器人六个关节轴都有一个机械原点的位置。
在以下的情况,需要对机械原点的位置进行转数计数器的更新操作:1)更换伺服电动机转数计数器电池后。
2)当转数计数器发生故障,修复后。
3)转数计数器与测量板之间断开过以后。
4)断电后,机器人关节轴发生了移动。
5)当系统报警提示“10036转数计数器未更新”时。
中测量工具的使用(1)测量垛板的长度
(2)测量锥体的角度
(3)测量圆柱体的直径
(4)测量两个物体间最短距离
(5)测量的技巧
测量的技巧主要体现在能够运用各种选择部件和捕捉模式正确地进行测量,这时要多练习,以便掌握其中的技巧。