HotZ 雷达系统第一章波形模糊函数
雷达波形模糊图专业训练课设报告

专业综合课程设计报告课设题目:雷达波形模糊图学院:信息与电气工程学院专业:电子信息工程班级:姓名:学号:指导教师:哈尔滨工业大学(威海)2013年11月28日一、设计任务模糊函数是对雷达信号进行分析研究和波形设计的有效工具, 是雷达信号理论中极为重要的一个概念。
模糊函数最初是在研究雷达分辨力问题时提出的, 并从衡量两个不同距离和不同径向速度目标的分辨度出发提出了模糊函数的定义。
但模糊函数不仅可以说明分辨力, 还可以说明测量精度、测量模糊度以及抗干扰状况等问题。
雷达信号的模糊函数与雷达信息的提取紧密相关, 它不仅涉及了雷达的精度, 还涉及了雷达的抗干扰、自适应以及雷达信号的处理方式。
本次课程设计目标是:画出某线性调频和相位编码信号的模糊图;根据模糊图分析多普勒频移对匹配滤波的影响;产生雷达回波数据并匹配滤波,根据仿真结果分析各参数对匹配滤波结果的影响。
二、 方案设计设计某线性调频和相位编码信号线性调频波形的定义为()⎪⎭⎫⎝⎛=2cos t t x τβπ τ≤≤t 0 (1)使用复数表达式,有()()t j tj e e t x θτπβ==/2τ≤≤t 0 (2)该波形的瞬时频率是相位函数的微分()()t dt t d t F i τβθπ==21 (3)假设0>β,在s τ的脉宽内()t F i 线性地扫过了整个Hz β带宽。
当βτ=50时,()t F 就是一个线性调频波。
画出其模糊图并分析模糊图的特征模糊函数是波形设计与分析的工具,它可以方便地刻画波形与对应匹配滤波器的特征。
模糊函数在分析分辨率、副瓣性能,以及多普勒和距离模糊方面非常有用,另外也可以用于对距离-多普勒耦合的分析。
考虑当输入为多普勒频移响应想()()t F j t x D π2ex p 时波形()t x 的匹配滤波器输出。
同时,假设滤波器具有单位增益(1=α),并且设计为在0=M T 时达到峰值。
这仅仅意味着滤波器输出端的时间轴与目标距离期望的峰值输出时间相关。
雷达模糊函数

雷达模糊函数函数名称:radar_blur函数功能:对雷达信号进行模糊处理函数参数:- signal:雷达信号,类型为一维数组- blur_radius:模糊半径,类型为整数函数返回值:处理后的雷达信号,类型为一维数组函数实现:```pythondef radar_blur(signal, blur_radius):"""对雷达信号进行模糊处理Args:signal: 雷达信号,类型为一维数组blur_radius: 模糊半径,类型为整数Returns:处理后的雷达信号,类型为一维数组"""# 初始化结果数组result = [0] * len(signal)# 处理每个点for i in range(len(signal)):# 计算当前点的模糊范围start = max(0, i - blur_radius)end = min(len(signal) - 1, i + blur_radius)# 对当前点进行模糊处理for j in range(start, end + 1):result[i] += signal[j]result[i] /= (end - start + 1)return result```函数说明:该函数实现了对雷达信号进行模糊处理的功能。
输入参数包括一个一维数组signal表示原始的雷达信号以及一个整数blur_radius表示模糊半径。
输出结果也是一个一维数组,表示经过模糊处理后的雷达信号。
函数的实现过程如下:首先,初始化一个长度为原始信号长度的数组result,用于存储处理后的信号。
然后,遍历原始信号中的每个点,计算该点的模糊范围,并对该范围内的所有点进行加权平均处理。
最后,将处理结果存储到result数组中,并返回该数组作为输出结果。
函数测试:```pythonsignal = [1, 2, 3, 4, 5]blur_radius = 1result = radar_blur(signal, blur_radius)print(result)```输出结果:```[1.5, 2.0, 3.0, 4.0, 4.5]```说明:对于输入信号[1,2,3,4,5]和模糊半径1,经过处理后得到的输出信号为[1.5,2.0,3.0,4.0,4.5]。
HotZ-雷达系统(第一章)波形模糊函数

22
2014-8-10
目标分辨场景
目标分辨问题
有两个相同的点目标 A和 B,它们相对雷达是视 角相同的邻近目标
从距离和径向速度二维进行分辨
fd
f d'
A B
目标A为基准,则: A的回波复包络为 B的回波复包络为
u(t )
f d' f d
fd
u (t )e j 2 fd t
为两个目标距离差对应的时间间隔 为两个目标相对径向速度差对应的 多普勒频移
发射信号为参考
tr
tr
23
t
2014-8-10
距离模糊函数与距离分辨率
衡量两个信号为“不同”的参数:均方差值
设信号是 维几何空间 中的点或矢量
用两点间的距离 度量点 和点 的可分辨程度
对
24
误差的均方,或均方差
2014-8-10
距离模糊函数与距离分辨率
距离分辨问题描述
fd
B A
A、B相对雷达径向速度相同 仅有距离差 时延
电场 电磁波 磁场
垂直极化
水平极化
6
2014-8-10
基本概念
RF波形属性
积累(同相)
部分积累(不完全同相)
抵消(反相)
7
非相参信号(噪声)
2014-8-10
雷达系统及其波形
雷达波形及其指标是决定任何雷达系统设计与性 能的基本部分 雷达系统设计考虑:
工作频率 连续波或脉冲 峰值功率 脉冲时宽 脉冲带宽 重复频率 调制类型 极化方式 应用类型、雷达硬件 硬件复杂程度 作用距离、系统灵敏度 (雷达方程) 待测目标尺寸 动目标检测 多目标检测 (模糊函数) 雷达成像
雷达模糊函数
雷达模糊函数雷达模糊函数是一种常见的信号处理技术,用于处理雷达接收到的信号并提取出目标信息。
雷达系统通过发射电磁波并接收回波来探测目标,而雷达模糊函数则可以帮助我们更好地理解这些回波信号。
雷达模糊函数在雷达信号处理中扮演着至关重要的角色。
它可以帮助我们确定目标的位置、速度和形状等信息,从而实现雷达系统的目标跟踪和识别功能。
雷达模糊函数通常包括距离模糊函数、速度模糊函数和角度模糊函数等,每种模糊函数都有其特定的应用场景和处理方法。
距离模糊函数是指雷达接收到的信号中存在距离信息上的不确定性,导致无法准确确定目标的距离。
这种模糊通常是由于雷达发射的脉冲信号在传播过程中受到多径效应、大气扰动等因素的影响所致。
为了解决距离模糊问题,我们可以采用多普勒处理、脉冲压缩等技术来提高雷达系统的分辨率和抗干扰能力。
速度模糊函数是指雷达接收到的信号中存在速度信息上的不确定性,导致无法准确确定目标的速度。
这种模糊通常是由于目标本身的运动状态、雷达系统的参数设置等因素所致。
为了解决速度模糊问题,我们可以采用脉冲多普勒处理、MTI滤波器等技术来提取目标的速度信息并实现速度测量。
角度模糊函数是指雷达接收到的信号中存在角度信息上的不确定性,导致无法准确确定目标的方位角。
这种模糊通常是由于天线指向精度、目标散射截面积等因素的影响所致。
为了解决角度模糊问题,我们可以采用波束形成、空时处理等技术来提高雷达系统的方位角分辨率和目标识别能力。
总的来说,雷达模糊函数在雷达信号处理中起着至关重要的作用。
通过对雷达接收到的信号进行模糊函数分析,我们可以更准确地获取目标信息并实现雷达系统的各种功能。
因此,深入了解雷达模糊函数的原理和应用对于提高雷达系统性能和效率具有重要意义。
希望通过本文的介绍,读者对雷达模糊函数有了更深入的了解,为相关领域的研究和应用提供参考和指导。
随机频率编码雷达信号的模糊函数性能分析
具体而言 ,一方面它可以使雷达工作频段扩大 ,使 雷达更有机会工作在无干扰或少干扰 的频率区, 尤其对 抗 窄带 瞄准 式 有 源干 扰 极 为有 效 ;另 一 方 面 。频 率 的随机 变 化提 高 敌 方 侦察 机 或 电子 战 系 统侦察、截获、测量 、分析、识别的复杂程度 ,进一
收 稿 日期 :2017—08—30:修 回 日期 :2017—09—19 作者简介 : 广权 ,男 ,硕士研究生 ,主要研究方 向为频率编码雷达 的信号处理与相参积 累方法 ;汤子跃 ,男,教授 ,主要从事雷达系统设计、
Key words:ra n dom frequ ency-coding;ambigu ity function;ra n ge ambig u ity;velocity ambig u ity
1 引 言
随机频 率编 码信 号作 为一种 新 型雷达 信号具 有很好 的低 截 获 概 率 (LPI)、电磁 兼 容 性 (EMC) 和抗射 频 干扰 (APFI)特 性 l1],它让 雷 达在 战场 的 生存 能力很 强,符合现代雷达信号发展 的方 向。
Analysis on Am biguity Function of Random Frequency-Coding Signal
BU Guang—quan ,TANG Zi—yue ,CAO Shi—hui ,HUANG Xin ,ZHONG Si—zhe
(1.Air Force Early W arning Academy,W uhan 430019,China;2.Unit 94782 Of PLA,Hangzhou 3 10000,China)
method of selecting the anti-jamming wavef orm is introducted by ana lyzing the relation between the ambiguity function of different coding types and t he jamming environment diagram.
典型雷达信号的产生及其“模糊函数”仿真(含Matlab程序)

典型雷达信号的产生及其“模糊函数”仿真(含Matlab程序)雷达发射波形的选择和设计直接影响雷达的性能以及抗干扰能力。
本次课程重点从模糊函数出发,仿真分析多种典型雷达信号:线性调频脉冲信号、三角波调频连续波信号、二相编码信号(Barker码/m序列)、多相编码信号(Frank码)。
课程将给出上述典型雷达信号的产生以及模糊图的Matlab仿真程序。
雷达模糊函数模糊函数是进行雷达波形设计和分析信号处理系统性能的重要工具,根据雷达信号的模糊函数,可以确定雷达发射波形的分辨能力、测量精度、模糊情况以及抑制干扰的能力。
雷达模糊函数表示匹配滤波器的输出,描述目标的距离和多普勒频移对回波信号的影响,信号的雷达模糊函数通常被定义为二维互相关函数的模的平方。
具体表达式为:模糊函数关于多普勒频率和延迟时间的三维图形称为雷达的模糊图。
对于一种给定的波形,其模糊图可以确定该波形的一些特征,同时也可以用某个时间或者频率门限值来切割三维模糊图得到模糊等高图。
模糊图的原点处模糊函数的值等于与感兴趣目标反射的信号理想匹配时的匹配滤波器的输出。
非零时的模糊函数值表示与感兴趣目标有一定距离和多普勒的目标回波。
在二维坐标平面内,若模糊函数的绝对值逼近于冲击函数呈理想图钉型时,就可以得到理想的二维分辨率,相当于把所有能量都集中在了坐标原点附近。
这是一次精品课程(图文课程),主要包含以下几个部分:一、模糊函数的概述二、线性调频脉冲信号及其模糊函数三、三角波调频连续波信号及其模糊函数四、二相码信号(Barker码/m序列)及其模糊函数五、多相码信号(Frank码)及其模糊函数具体内容见下面截图,订阅后可查看WORD可编辑版本以及下载相关Matlab仿真程序。
具体参数设置以及仿真结果见WORD文档和Matlab源程序。
模糊函数

Property 4 says that adding LFM modulation shears the resulting ambiguity function. The meaning of the shear will be demonstrated following the proof of property 4. This important property is the basis for an important pulse compression technique.
Radar Signals, By Nadav Levanon and Eli Mozeson ISBN 0-471-47378-2 Copyright 2004 John Wiley & Sons, Inc.
34
MAIN PROPERTIES OF THE AMBIGUITY FUNCTION
then adding linear frequency modulation (LFM), which is equivalent to a quadratic-phase modulation, implies that u(t) exp(j πkt 2 ) ⇔ |χ(τ, ν − k τ)| (3.6)
Property 2: To prove this property, we rewrite χ(τ, ν), replacing ν with −f : χ(τ, −f ) =
∞ −∞
[u(t)u∗ (t + τ)] exp(−j 2πf t) dt
(3.10)
which is recognized as the Fourier transform χ(τ, −f ) = F [β(τ, t)] of the function β(τ, t) = u(t)u∗ (t + τ) (3.11)
雷达波形
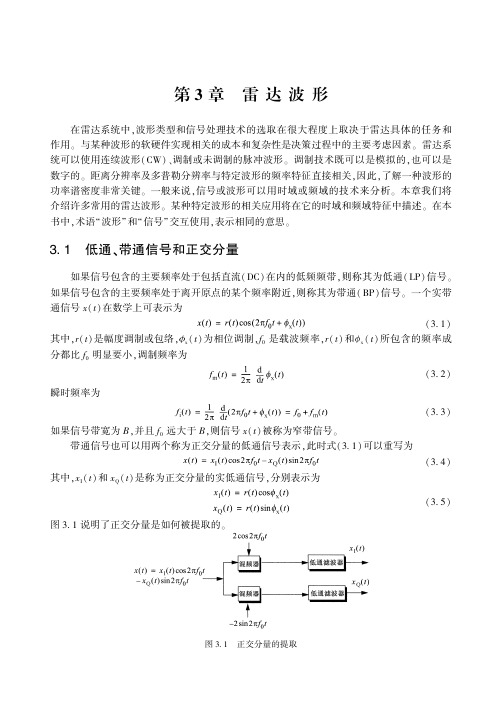
第3章 雷达波形在雷达系统中,波形类型和信号处理技术的选取在很大程度上取决于雷达具体的任务和作用㊂与某种波形的软硬件实现相关的成本和复杂性是决策过程中的主要考虑因素㊂雷达系统可以使用连续波形(CW)㊁调制或未调制的脉冲波形㊂调制技术既可以是模拟的,也可以是数字的㊂距离分辨率及多普勒分辨率与特定波形的频率特征直接相关,因此,了解一种波形的功率谱密度非常关键㊂一般来说,信号或波形可以用时域或频域的技术来分析㊂本章我们将介绍许多常用的雷达波形㊂某种特定波形的相关应用将在它的时域和频域特征中描述㊂在本书中,术语 波形”和 信号”交互使用,表示相同的意思㊂3.1 低通㊁带通信号和正交分量如果信号包含的主要频率处于包括直流(DC)在内的低频频带,则称其为低通(LP)信号㊂如果信号包含的主要频率处于离开原点的某个频率附近,则称其为带通(BP)信号㊂一个实带通信号x(t)在数学上可表示为(3.1)其中,r(t)是幅度调制或包络,x(t)为相位调制,f0是载波频率,r(t)和x(t)所包含的频率成分都比f0明显要小,调制频率为(3.2)瞬时频率为(3.3)如果信号带宽为B,并且f0远大于B,则信号x(t)被称为窄带信号㊂带通信号也可以用两个称为正交分量的低通信号表示,此时式(3.1)可以重写为(3.4)其中,x I(t)和x Q(t)是称为正交分量的实低通信号,分别表示为(3.5)图3.1说明了正交分量是如何被提取的㊂图3.1 正交分量的提取3.2 解析信号在式(3.1)中定义的正弦信号x (t )可以写为复信号(t )的实部,更具体的表示为(3.6)定义 解析信号”为(3.7)其中(3.8)并且(3.9)()是(t )的傅里叶变换,X()是x (t )的傅里叶变换㊂式(3.9)可以写为(3.10)其中,U()为频域阶跃函数㊂由此可以得出(t )为(3.11)~x 是x (t )的希尔伯特变换㊂利用式(3.6)和式(3.11),可以得出(这里只给出结果,没有证明)(3.12)这与式(3.44)相似,只是这里的=2πf 0㊂根据帕塞瓦尔(Parseval)定理,可以看出x (t )的能量为(3.13)3.3 连续和脉冲波形一个给定信号的频谱描述了其能量在频域的分布㊂一个能量信号(有限能量)的特征可以由它的能量谱密度(ESD)函数来表示,而一个功率信号(有限功率)的特征可以由它的功率谱密度(PSD)函数来表示㊂ESD 的单位为J /Hz,PSD 的单位为W /Hz㊂信号带宽是指信号非零谱的频率范围㊂一般说来,一个信号可以由它的时间(时域)和带宽(频域)来定义㊂如果信号的带宽是有限的,那么就说这个信号是带限的㊂具有有限持续时间(时间有限)的信号具有无限的带宽,而带宽有限的信号具有无限的持续时间㊂极限情况是一个连续正弦信号,它的带宽是无限小的㊂一个时域信号f (t )的傅里叶变换(FT)如下:(3.14)而逆傅里叶变换(IFT)为(3.15)信号自相关函数R f (τ)为(3.16)89雷达系统设计MATLAB 仿真式中,星号表示复共轭㊂信号幅度谱为|F()|㊂如果是能量信号,则其ESD 为|F()|2;如果是功率信号,则其PSD 为⎺S f(),是其自相关函数的傅里叶变换,即(3.17)首先,考虑CW波形为(3.18)f 1(t )的傅里叶变换为(3.19)其中,δ(㊃)是狄拉克δ(Dirac⁃δ)函数,0=2πf 0㊂如图3.2中的幅度谱所示,信号f 1(t )有无限小的带宽,位于±f 0处㊂图3.2 一个连续正弦波形的幅度谱接下来考虑时域函数f 2(t ),为(3.20)它的傅里叶变换为(3.21)其中(3.22)f 2(t )的幅度谱如图3.3所示㊂此时,带宽是无限的㊂由于无限带宽是物理不可实现的,因此信号的带宽近似为2π/τrad /s 或者是1/τHz㊂实际上,这种近似得到广泛的认可,因为它把信号大部分的能量都计算在内㊂下面考虑相干加窗连续波形f 3(t )为(3.23)显然f 3(t )是周期的,其中T 为周期(回忆f r =1/T 即为PRF)㊂利用复指数傅里叶级数,f 3(t )可重写为(3.24)其中,傅里叶级数的系数F n 为99第3章 雷达波形(3.25) f3(t)的傅里叶变换为(3.26) f3(t)的幅度谱如图3.4所示㊂此时,幅度谱具有对应于F n的(sin x)/x形状的包络,谱线之间的间隔都等于雷达的脉冲重复频率f r ㊂图3.3 单脉冲或非相干脉冲串的幅度谱图3.4 无限长相干脉冲串的幅度谱最后,定义函数f4(t)为(3.27)注意,f4(t)为f3(t)的一个有限时宽信号㊂f4(t)的傅里叶变换为(3.28)001雷达系统设计MATLAB仿真其中,操作符(㊃)表示卷积㊂此时,频谱如图3.5所示,包络仍然是对应于脉宽的(sin x )/x ,但是谱线被对应于时宽NT 的(sin x )/x 谱替换㊂图3.5 有限长相干脉冲串的幅度谱3.4 线性调频波形频率或相位调制信号用来得到宽得多的工作带宽㊂线性调频(LFM)是常用的方式㊂在这种情况下,频率在脉宽内线性扫描,或者向上(上调频)或者向下(下调频)㊂匹配滤波器的带宽与扫描的带宽成比例,与脉宽无关㊂图3.6是一个典型的LFM 波形样本,脉宽为τ,带宽为B ㊂LFM 上变频波形的瞬时相位可以表示为(3.29)其中,f 0为雷达中心频率,μ=(2πB )/τ是LFM 系数㊂因此,瞬时频率为(3.30)同理,下变频波形的瞬时相位和频率分别为(3.31)(3.32)典型的线性调频信号可以表示为(3.33)其中,rect(t /τ)表示宽度为τ的矩形脉冲,则式(3.33)可写为(3.34)其中101第3章 雷达波形(3.35)是s1(t)的复包络㊂图3.6 典型LFM波形信号s1(t)的频谱由它的复包络s(t)决定㊂式(3.34)中的复指数项表示中心频率f0的频移㊂将s(t)进行傅里叶变换,得到(3.36)令μ′=2πμ=2πB/τ,进行变量替换为(3.37)因此,式(3.36)可写为(3.38)(3.39)其中(3.40)(3.41)用C(x)和S(x)表示菲涅耳积分,定义如下:(3.42)(3.43)菲涅耳积分近似为(3.44)201雷达系统设计MATLAB仿真(3.45)注意,C(-x)=-C(x),S(-x)=-S(x)㊂图3.7给出了C(x)和S(x)在0≤x≤4.0时的图形㊂该图可以使用3.12节的清单3.1中的MATLAB程序 fig37.m”得到㊂在式(3.39)中使用式(3.42)和式(3.43),进行积分得到(3.46)图3.8显示了线性调频信号实部㊁虚部及幅度谱的典型图形㊂图3.8(c)中的类似方形的频谱就是广为人知的菲涅耳谱㊂该图可由3.12节的清单3.2中的MATLAB程序 fig38.m”得到㊂开发了一个MATLAB GUI[见图3.8(d)],用来输入LFM数据并显示图3.8所示的输出㊂文件名为 LFM gui.m”,其输入是未压缩的脉宽和调制带宽㊂图3.7 菲涅耳积分(a)典型LFM波形,实部图3.8301第3章 雷达波形(b)典型LFM 波形,虚部(c)LFM波形的典型谱(d)GUI 工作空间 LFM gui.m”图3.8(续)401雷达系统设计MATLAB 仿真3.5 高距离分辨率在第1章中,得到了一个用脉宽τ表示距离分辨率ΔR 的表达式㊂当未使用脉冲压缩时,雷达接收机的瞬时带宽B 通常和脉冲的带宽匹配㊂在大多数雷达应用中,这是通过令B =1/τ实现的㊂因此,距离分辨率为(3.47)雷达使用者和设计者不约而同地通过最小化ΔR 来寻求实现高距离分辨率(HRR)㊂然而如式(3.47)所示,为了得到高距离分辨率,必须使用短脉冲,从而导致平均发射功率的减小,并且强加了对大工作带宽的需求㊂在得到好的距离分辨率的同时保持足够的平均发射功率,可以通过使用脉冲压缩技术来实现,这将在第5章中进行讨论㊂利用频率或相位调制,脉冲压缩可以使我们获得相当长脉冲的平均发射功率,同时得到对应非常短脉冲的距离分辨率㊂例如,考虑一个LFM 波形,其带宽为B ,未压缩脉宽为τ㊂经过脉冲压缩后,压缩后的脉宽表示为τ′,其中τ′<<τ,HRR为(3.48)经常使用线性调频和调频(FM)连续波信号来得到HRR㊂高距离分辨率也可以通过一种称为 步进频波形”(SFM)的波形来合成㊂与LFM 或FM⁃CW 相比,步进频波形需要更加复杂的硬件实现;不过,对雷达工作带宽要求较低㊂这是因为接收机的瞬时带宽与SFM 子脉冲带宽相匹配,其远小于LFM 或FM⁃CW 带宽㊂下一节将对SFM 波形进行简要讨论㊂3.6 步进频波形步进频波形(SFW)产生合成的HRR 目标距离像,这是因为目标距离像是通过实际目标距离像的频域样本的逆离散傅里叶变换(IDFT)计算的㊂产生合成的高分辨率距离像的过程在Wehner ①的著作中描述,总结如下:1.发射n 个窄带脉冲序列,从一个脉冲到下一个脉冲的频率以固定的频率步长步进㊂每组的n 个脉冲称为一个脉冲串(burst)㊂2.接收信号以对应于每个脉冲中心频率的速率进行采样㊂3.收集并保存每个脉冲串的正交分量㊂4.对正交分量进行频谱加权(为了降低距离旁瓣电平),进行目标速度㊁相位和幅度变化的校正㊂5.计算每个脉冲串加权后正交分量的IDFT,以合成该脉冲串的距离像㊂对N 个脉冲串重复处理,以得到连续的合成高分辨率距离像㊂图3.9显示了典型的SFW 脉冲串㊂脉冲重复间隔(PRI)为T ,脉宽为τ′㊂每个脉冲可以有自己的LFM,或者其他类型的调制㊂此书假设为LFM㊂第i个步进的中心频率为(3.49)501第3章 雷达波形①Wehner,D.R.,High Resolution Radar ,second edition,Artech House,1993.图3.9 步进频波形脉冲串在一个脉冲串内,第i个步进的发射波形可以描述为(3.50)其中,θi 为相对相位,C i 为常数㊂在距离R 0处的目标在时间t =0时的接收信号为(3.51)其中,C′i 为常数,往返时延τ(t )为(3.52)c 为光速,v 为目标的径向速度㊂为了提取正交分量,接收信号下变频到基带㊂准确地说,s ri (t )和下面信号混频(3.53)经过低通滤波器后,正交分量为(3.54)其中,A i 为常数,并且(3.55)现在,f i =Δf ㊂对于每个脉冲,正交分量的采样时刻为(3.56)τr 是与对应于距离像起点的距离有关的时延㊂正交分量的复数形式可以表示为(3.57)式(3.57)表示基于单个脉冲串的目标反射性的频域样本㊂该信息可以利用IDFT 转化为一系列距离时延的反射性(即为距离像)大小,表示如下:601雷达系统设计MATLAB 仿真(3.58)将式(3.57)和式(3.55)代入式(3.58)中,合并同类项得到(3.59)相对于n归一化,并且假设A i=1,目标为静止的(即v=0),则式(3.59)可以写为(3.60)在式(3.60)中,利用f i=iΔf得到(3.61)其可以简化为(3.62)其中(3.63)最后,合成的距离像为(3.64) 3.6.1 SFW的距离分辨率和距离模糊一般来说,距离分辨率由总的系统带宽来决定㊂假设一个SFW具有n个步进,步长为Δf,则对应的距离分辨率等于(3.65)SFM的距离模糊可以通过检验对应于在距离R0的点散射体的相位来决定㊂更准确地说,(3.66)那么(3.67)或等价于(3.68)从式(3.68)可以明显看出,当Δ=Δ+2nπ时,存在距离模糊㊂因此(3.69)不模糊距离窗为(3.70)因此,关于对应于脉冲串时延的绝对距离,使用特定SFW合成的距离像表示在不模糊距离窗内所有散射体的相对距离反射性㊂另外,如果一个特定目标的范围大于R u,则落在不模糊距离窗外的所有散射体将重叠在一起,出现在合成距离像上㊂这种重叠问题与使用快速傅里叶变换(FFT)分辨某个信号的频率分量时出现的频谱混叠是一样的㊂例如,考虑一个频率分辨率为Δf=50Hz,长度为NFFT=64的FFT㊂此时,这个FFT可以分辨的音频在-1600Hz 到1600Hz之间㊂当这个FFT被用来分辨一个正弦音调为1800Hz的频率分量时,就会发生频谱混叠,在第4个FFT单元(即200Hz)会出现谱线㊂因此,为了在合成距离像中避免混叠,频率步进Δf必须满足(3.71)其中,E为目标长度,单位为m㊂另外,脉冲宽度也必须足够大,以包括整个目标长度,所以(3.72)实际中(3.73)为了减小由于考察目标周围的杂波而引起的合成距离像的污染,这是必要的㊂MATLAB函数 hrr profile.m”函数 hrr profile.m”计算并画出特定SFW的合成HRR像(见3.12节的清单3.3)㊂该函数使用一个长度为步进数两倍的逆傅里叶变换(IFFT)㊂还假设采用同样大小的汉明窗㊂调用语法如下:[hl]=hrr profile(nscat,scat range,scat rcs,n,deltaf,prf,v,r0,winid)其中,符号含义如下表所示㊂符 号描 述单 位状 态nscat组成目标的散射体个数无输入scat range包含散射体距离的向量m输入scat rcs包含散射体RCS的向量m输入n步进数无输入deltaf步进频率Hz输入prf SFW的PRF Hz输入v目标速度m/s输入r0像起始距离m输入winid数值>0为汉明窗数值<0为不加窗无输入hl距离像dB输出例如,假设距离像起始点为R0=900m处,且nscat tau n deltaf prf v 3100μs6410MHz10KHz0.0这种情况下因此,间隔大于0.235m的散射体将会在合成距离像上显示为不同的尖峰㊂假设两种情况,第1种:[scat range]=[908,910,912]m,第2种:[scat range]=[908,910,910.2]m㊂在这两种情况下,令[scat rcs]=[100,10,1]m2㊂图3.10显示了第1种情况下利用函数 hrr profilr.m”在没有使用汉明窗时所产生的合成距离像㊂图3.11与图3.10类似,除了此时使用了汉明窗㊂图3.12显示了对应于第2种情况的合成距离像(使用汉明窗)㊂注意在图3.10和图3.11中,所有3个散射体都可以被分辨;而在图3.12中,最后两个散射体没有被分辨,因为它们的间隔小于ΔR㊂图3.10 3个被分辨散射体的合成距离像,未加窗图3.11 3个散射体的合成距离像,汉明窗接下来考虑另外一种情况,其中[scat range]=[908,912,916]m㊂图3.13显示了对应的距离像㊂在这种情况下,出现了混叠,最后一个散射体出现在合成距离像的近段部分㊂再考虑这种情况,其中[scat range]=[908,910,923]m图3.12 3个散射体的合成距离像,两个不能分辨图3.14显示了对应的距离像㊂在这种情况下,第1个和第2个散射体出现了模糊,因为它们的间隔为15m㊂两者都出现在相同的距离单元㊂3.6.2 目标速度的影响由式(3.64)定义的距离像是在假设检验目标静止的情况下得到的㊂将式(3.55)和式(3.56)代入到式(3.58)中,可以确定目标速度对合成距离像的影响,得到(3.74)图3.13 3个散射体的合成距离像,第3个散射体出现混叠式(3.74)中的附加相位项使合成距离像失真㊂为了说明这种失真,考虑前一节描述的SFW,并且假设第1种情况下的3个散射体,而且假设目标速度v=100m/s㊂图3.15显示了这种情况下的合成距离像㊂比较图3.11和图3.15,清楚地显示了由于未补偿目标速度而产生的失真㊂图3.16与图3.15类似,除了速度v=-100m/s㊂注意在任意一种情况下,目标由预定的位置偏移了(向左或向右)Disp=2×n×v/PRF(1.28m)㊂图3.14 3个散射体的合成距离像,第1个和第2个散射体出现在相同的FFT单元图3.15 由于目标速度引起的距离像失真这种失真可以通过将每个脉冲的复接收数据乘以下面的相位项消除(3.75)和分别是目标速度和距离的估计值㊂这种修订正交分量相位的过程通常被称为 相位旋转”㊂事实上,当不能得到和好的估计时,目标速度的影响可以通过在SFW中前后脉冲之间使用调频来减小㊂此时,每个子脉冲的频率由一个预定的编码来选取㊂这种类型的波形通常称为频率编码波形(FCW)㊂Costas波形或信号就是这种类型波形的一个很好的例子㊂图3.17是一个RCS为=10m2,v=15m/s的运动目标的合成距离像㊂目标的原始距离为R=912m㊂其他所有参数与前面一样㊂这幅图形可以使用3.12节的清单3.4中的MATLAB程序 fig317.m”得到㊂图3.17 一个运动目标的合成距离像(4s长)3.7 匹配滤波器匹配滤波器最独特的特征是当输入端出现信号与加性白噪声时,其在输出端产生最大可实现瞬时SNR㊂此噪声不必为高斯的㊂接收机输出端的峰值瞬时SNR可以通过将雷达接收机传输函数与接收信号匹配来得到㊂下面将证明匹配滤波器输出端的峰值瞬时信号功率除以平均噪声功率,等于两倍的输入信号能量除以输入噪声功率,无论雷达采用何种波形㊂这就是为什么我们常说匹配滤波器是SNR意义下的最优滤波器的原因㊂注意,在雷达方程(SNR)推导中使用的峰值功率表示在脉冲持续期间的平均信号功率,而不是在匹配滤波器情况下的峰值瞬时信号功率㊂事实上,实现理想的匹配滤波有时是很困难的㊂这时可以使用准最佳滤波器㊂由于这种失配,输出信噪比会降低㊂考虑一个使用有限持续时间的能量信号s i(t)的雷达系统㊂用τ′表示脉宽,并且假设使用匹配滤波器接收机㊂我们需要回答的主要问题是:当输入为延迟的信号s i(t)加上加性白噪声时,使接收机输出端的瞬时SNR最大的滤波器冲激或频率响应是什么样的?匹配滤波器的输入信号可以表示为(3.76)其中,C为常数,t1是正比于目标距离的未知时延,n i(t)是输入白噪声㊂因为输入噪声是白色的,所以其对应的自相关和功率谱密度(PSD)函数分别为(3.77)(3.78)其中,N0为常数㊂s0(t)和n0(t)分别表示信号和噪声的滤波器输出㊂更准确地可定义(3.79)其中(3.80)(3.81)操作符*表示卷积,h(t)为滤波器的冲激响应(假设滤波器为线性时不变的)㊂用R h(t)表示滤波器的自相关函数,则输出噪声的自相关函数和功率谱密度函数分别为(3.82)(3.83)其中,H()为滤波器冲激响应h(t)的傅里叶变换㊂总的平均输出噪声功率等于⎺Rn o(t)在t=0处的值,更精确的表示为(3.84)在t时刻的输出信号功率为|Cs o(t-t1)|2,并且利用式(3.80)可以得到(3.85)在t时刻输出SNR的一般表达式可以写为(3.86)将式(3.84)和式(3.85)代入式(3.86),得到(3.87) Schwartz不等式为(3.88)其中,等号仅当P=kQ*时成立,这里k为常数可以假定为1㊂则将式(3.88)作用于式(3.87)的分子上,得到(3.89)式(3.89)告诉我们,当等号成立时[即根据式(3.88),h=ks*i],出现峰值瞬时SNR㊂更准确地,如果我们假设等号出现在t=t0时刻,并且k=1,那么(3.90)最大瞬时SNR为(3.91)式(3.91)可以利用Parseval定理简化为(3.92)其中,E代表输入信号的能量㊂因此,可以将输出端峰值瞬时SNR写为(3.93)因此可得出结论:峰值瞬时SNR仅依赖于信号能量和输入噪声功率,而与雷达使用的波形无关㊂最后,可以由式(3.90)定义匹配滤波器的冲激响应㊂如果期望在t0=t1时刻出现峰值,我们得到非因果的匹配滤波器冲激响应为(3.94)另一方面,因果的冲激响应为(3.95)这时的峰值出现在t0=t1+τ时刻㊂h nc(t)和h c(t)的傅里叶变换分别为(3.96)(3.97)其中,Si()为s i(t)的傅里叶变换㊂因此,H()和S i()的模是相等的,而相位响应是相反的㊂例题计算线性滤波器输出端最大瞬时SNR,其冲激响应与信号x(t)=exp(-t2/2T)相匹配㊂解:信号能量为最大瞬时SNR为其中,N0/2为输入噪声功率谱密度㊂。
雷达模糊函数

雷达模糊函数雷达模糊函数是雷达信号处理中经常使用的一种数学模型,用于描述雷达系统中目标的位置和速度信息。
雷达系统通过发送和接收无线信号来探测目标的位置和速度,但由于各种环境因素的影响,接收到的信号往往会受到干扰和衰减,导致信号的模糊化。
雷达模糊函数就是用来描述这种信号模糊化程度的函数。
雷达模糊函数通常由雷达系统的特性和目标的运动状态等因素决定。
在雷达系统中,信号的传播会受到大气折射、多路径传播、目标散射等因素的影响,导致信号在传播过程中发生衰减和失真。
同时,目标的运动状态也会对接收到的信号产生影响,比如目标的速度越高,接收到的信号就会越模糊。
因此,雷达模糊函数可以用来描述在不同环境条件下接收到的雷达信号的模糊程度。
雷达模糊函数的形式通常是一个复杂的数学函数,包括各种参数和变量。
通过对雷达系统和目标的特性进行建模和分析,可以得到相应的雷达模糊函数,从而帮助雷达系统更准确地探测目标的位置和速度。
在实际的雷达信号处理中,工程师们会根据具体的情况选择合适的雷达模糊函数,以提高雷达系统的性能和探测精度。
除了用于描述信号模糊化程度外,雷达模糊函数还可以应用于雷达信号的处理和分析。
通过对雷达信号进行模糊函数的计算和处理,可以更好地理解和解释雷达系统的工作原理,从而为雷达系统的优化和改进提供参考。
同时,雷达模糊函数还可以用于目标跟踪、碰撞预警、地图绘制等领域,为相关应用提供支持和指导。
总的来说,雷达模糊函数在雷达信号处理中起着至关重要的作用,它不仅可以描述信号的模糊化程度,还可以用于雷达系统的优化和改进。
通过对雷达模糊函数的研究和应用,可以提高雷达系统的性能和可靠性,为雷达技术的发展和应用提供有力支持。
希望未来能够进一步深入研究雷达模糊函数的理论和应用,为雷达技术的发展做出更大的贡献。
一种雷达信号模糊函数特征提取与识别方法

Xi n g Qi a n g ,Z h u We i g a n g 。 ,Ra n Da
( 1 . De p a r t me n t o f Gr a d u a t e Ma n a g e me n t o f Eq u i p me n t Ac a d e my,Be i j i n g 1 0 1 4 1 6 , Ch i n a ;
0 引 言
现代 雷 达 向着 软 件化 、 智能 化 、 多用 途 方 向发 展 , 兼 有 多功能 、 多种工作 状态 和 工作 体制 ; 同时为 了提高
2 . De p a r t me n t o f Op t i c a l a n d El e c t r o n i c E q u i p me n t o f Eq u i p me n t Ac a d e my,Be i i i n g 1 0 1 4 1 6 , Ch i n a )
Ab s t r a c t : M od e r n r a da r de v e l o ps f or t he i nt e l l i g e nt ,s o f t wa r e ,mu l t i — f u nc t i o na l an d v e r s a t i l e d i r e c t i on,
分 析 。 结 果 验 证 了该 方Байду номын сангаас法 的 可 行 性 。
关 键词 : 雷达 ; 特征 提取 ; 识别; 流行 学 习 中图分 类号 : TN9 7 4 文献 标识 码 : A
Re s e a r c h o n a me t ho d f o r r a d a r s i g na l a mb i g u i t y f u n c t i o n f e a t ur e
《雷达信号分析》PPT课件

2
t 2 dt
三、单载频矩形脉冲信号: 2 2 T 2
3
26
§3.4 信号的非线性相位特性
对测量精度的影响
(t) 0,具有非线性相位。
时间相位常数: 2 t ' (t)a2 (t)dt 2 t ' (t) u(t) 2 dt
2
[a(t)] dt
u(t) 2 dt
2
2 0
2E N0
1 [1
(
0
)2 ]
2
2 0
1
2E [1 (
N0
0
)2 ]
结论:① ②
27
例1: u(t) rect( t )e jkt2
T
t T
(t ) k t 2 ' (t ) 2k t
2
t ' (t)a 2 (t)dt
2
T /2
t(2kt)dt
T / 2
2kT2
2
[a(t)] dt
20
经过推导有:
Sr (t)
[t
2v t
]e
j
2f0 [t
2vt C
]
C
[t ]e j 2f0 e j 2 ( f0 fd )t
1
2v , C
fd
2v C
f0
2v
运动目标的影响:① 压缩/展宽;②多普勒偏差。
考虑到 1, f0 f有d :
S r (t) [t ]e j 2 ( f0 fd )(t )
4
7 相干脉冲串信号
7.1相干脉冲串信号 7.2 均匀脉冲串信号的频谱 7.3 均匀脉冲串信号的模糊函数 *7.4 均匀脉冲串信号的性能 *7.5 均匀脉冲串信号的处理方法 *7.6 其它形式脉冲串信号简介
HotZ-雷达系统(第一章)波形模糊函数 ppt课件

1.1 常见雷达波形 1.2 雷达信号模糊函数
1
背景
发射机 收发开关
天线
目标
终端 显示
信号 处理
接收机
R
雷达依赖天线向空间辐射电磁波,并接收由目标散 射的电磁波,以确定目标的存在。
雷达发射的电磁波具有一定的形式:连续波或脉冲 串,单频的或调频、调幅或相位编码的
2
雷达波形要求
要实现目标的有效检测,雷达信号波形必须同时满 足以下条件:
待测目标尺寸
调制类型
动目标检测
极化方式
多目标检测
波形、环境匹配 (模糊函数) 雷达成像
8
长度参数 距离像 目标识别
常见雷达波形介绍
连续波(Continuous Wave,CW) 频率调制连续波(Frequncey Modulated CW,FMCW) 脉冲(Pulsed)
9
常见雷达波形介绍
CW Radar
-可有效测量固定目标距离 单基系统存在收发隔离问题,双基系统较好
11
常见雷达波形介绍
Pulsed Radar
发射机由发射脉冲开、关 当发射机关闭时,接收机打开 在脉冲间的距离门上感知目标
-可有效测量目标距离 单基地系统的发射机与接收机隔离不是问题 可以测量距离变化率
12
常见雷达波形介绍
足够的能量(看得见) 足够的目标分辨率(看得准) 对需要的回波有很好的选择、屏蔽能力
(选择、对抗能力) 选择的雷达波形要与雷达用途、目标类型、目标环 境“匹配”
3
基本概念
波是一种可在媒介或空间中传播的,连续或突发的 周期性扰动,其到达均值的位移是时间,或空间, 或两者的函数。 电磁波直观解释是发射到空中的能量,这种能量部 分以电场的形式存在,部分的以磁场的形式存在。 电磁波的基本特性有:速度、方向、极化、强度、 波长、频率和相位。 波形是波的周期变化量的瞬时值沿时间表示的图形
外辐射源雷达互模糊函数的两种快速算法_高志文
分级抽取 FFT 算法流程 如图 1 所示, 初始化 时 l = 0, 算法的具体步骤概括如下: Step1: 计算 rN ( n , l ) = u ( n) v ( n + l) , n = 0, 1, ,,il[ N h1/ D 1 ] , ceil 表 示对 N h1 / D 1 朝正无穷大 方向取 整, c = mod( m, C) , c = 0, 1, ,, C 1. 为避免预加权 的数 据互 相重 叠, 需 要存储 C 个不 同 的 ucc ( mD + i) . 以三级抽取为例 说明预 加权方法, 三级 抽取 中的 第一级 滤波 器阶数 N h 1 通常 为第一 级抽取 比 D 1 的 2~ 3 倍, 假设 C = ceil[ N h1/ D 1] = 3, 第一级抽取的 预加权框图如图 3 所示. 将 图 1、 图 2 和 图 3 结合 起来, 可得到预加权三级抽取 FFT 算法流程图. 预加权三级抽
针 对外辐射源雷达 ( 无源雷达、 被动雷达 ) 利用 互模糊函数测量时延 差和多普勒频移的 运算量大 , 直接
计算难以满足系统实时性要求的问题 , 本文提出了 外辐射源雷达互模糊函数的两种快速算法 : 分级抽取 FFT 算法和预 加权分级抽取 FFT 算法 . 分级抽取 FFT 算法降低了 抗混叠滤波器的阶 数 , 明 显地节省了 计算量和 存储量 ; 预加权 分级 抽取 FFT 算法使第一级滤波的乘法运算在时延的循环外进行 , 进一 步提高了计 算效率 , 代价是存 储量有所 增加 . 实测 结果表明本文所提两种快速算法有效地提高了计算效率 . 关键词 : 外辐射源雷达 ; 互模糊函数 ; 分级抽取 ; 预加权 中图分类号 : TN957. 51 文献标识码 : A 文章编号 : 0372 - 2112 ( 2009) 3 - 0669 - 04
HotZ-雷达原理与系统-第五章 雷达作用距离
第五章雷达作用距离作用距离是雷达的重要性能指标之一,它决定了雷达能在多大的距离上发现目标。
作用距离的大小取决于雷达本身的性能,其中有发射机、接收系统、天线等分机参数,同时又和目标的性质及环境因素有关。
第一节雷达方程雷达作用距离方程,表征雷达作用距离和发射机、接收系统、天线分机参数以及目标的性质、环境因素等的关系距离R 处任一点的雷达发射信号功率密度:考虑到定向天线增益G :§5.1.1 基本雷达方程目标散射截面积设为σ,则其接收的功率为σS 1以目标为圆心,雷达处散射的功率密度:雷达收到功率:Ar:雷达天线接收面积rr雷达接收到的回波功率反比于目标与雷达站间距离R的四次方►收发不同天线时►收发同天线时►收发不同天线时,最大作用距离►收发同天线时,最大作用距离雷达实际作用距离受目标后向散射截面积σ、S imin 、噪声和其他干扰的影响,具有不确定性,服从统计学规律。
当接收功率为接收机最小检测功率S imin时,可得:R max∝λ2►总结:◆雷达方程虽然给出了作用距离和各参数间的定量关系,但由于未考虑设备的实际损耗和环境因素,且目标有效反射面积σ和最小可检测信号S imin不能准确预定,因此仅用来作估算的公式,考察各参数对作用距离的影响。
◆雷达在噪声和其他干扰背景下检测目标,同时,复杂目标的回波信号本身存在起伏,因此,接收机输出的是一个随机量。
雷达作用距离也不是一个确定值而是统计量,通常只在概率意义上讲,当虚警概率(如10-6)和发现概率(如90%)给定时的作用距离是多大。
§5.1.2 目标的雷达截面积►目标的雷达截面积定义:►实际测量:返回接收机每单位立体角内的回波功率在远场条件(平面波照射的条件)下,目标处每单位入射功率密度在接收机处的单位立体角内产生的反射功率乘以4π习题►设目标距离为R0,当标准金属圆球(截面积为σ)置于目标方向离雷达R0/2处时,目标回波的平均强度正好与金属球的回波强度相同,试求目标的雷达横截面积。
雷达原理笔记之模糊与盲区

参数 PRF1 PRT2 距离门宽度 目标所在的距离门数(PRF1相对应) 目标的视在距离(测量距离)
根据PRF1和PRT2计算得到最大不模糊距离:
数值 25kHz 41 150m
20
则,目标的可能距离:
则可根据目标在PRT2对应的距离门求解出真实距离:
目标真实距离/km
PRT2对应的距离/km
3
1. 回波信号的脉冲包络有起伏(目标起伏特性、加性噪声、天线扫描对脉冲 幅度的调制【空域滤波】)
2. 相参处理时间有限(时域截短,频谱展宽【相当于加窗】) 3. 杂波谱线展宽的原因,除1和2还有固定目标的内部运动(地面扬尘、路人
行走等)
1.1.3 盲区出现原因
雷达对接收的回波信号进行FFT处理前首先经过MTI杂波对消处理。而杂波的频 谱位置就是在单值测速区间的0多普勒点。如果运动目标的多普勒频移等于PRF的整 数倍,那么由于频谱的周期重现在单值测速区间,该运动目标的频谱也处在0多普勒 点附近。因此在做MTI杂波对消处理的同时也将运动目标给对消处理了。因此在后续 的FFT处理中就很难再发现运动目标,造成测速盲区。
1.3.2 其他方法
示踪脉冲法(实践起来较复杂) 脉冲舍弃法(常用)
1.1.4 危害
对运动目标的 运动方向 和 速度大小 难以判断甚至无法探测。如下仿真截 图,目标速度120.11m/s,但是测出来的速度却是1.96m/s。相差很大。极限情 况如果目标的多普勒频移fd等于PRF,运动目标会被对消,产生周期性的测速 盲区。
1.2 距离模糊与盲区
1.2.1 模糊出现原因
3 mod(6.15)=3
9
9 mod(6.15)=2.85
15
15 mod(6.15)=2.7
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
雷达系统设计考虑:
工作频率
应用类型、雷达硬件 ★最重要
连续波或脉冲 硬件复杂程度
峰值功率 脉冲时宽 脉冲带宽 重复频率
作用距离 、系统灵敏度 (雷达方程)
待测目标尺寸
调制类型
动目标检测
极化方式
多目标检测
波形、环境匹配 (模糊函数) 雷达成像
8
长度参数 距离像 目标识别
2
常见雷达波形介绍
连续波( Continuous Wave,CW)
-波形缺乏“时间标志”
10
2
常见雷达波形介绍
FMCWRadar
? 发射被一频率序列调制的连续正弦波 ? 发射机与接收机始终处于工作状态 ? 通过频差发现目标
-可有效测量固定目标距离 ? 单基系统存在收发隔离问题,双基系统较好
11
2
常见雷达波形介绍
Pulsed Radar
? 发射机由发射脉冲开、关 ? 当发射机关闭时,接收机打开 ? 在脉冲间的距离门上感知目标
-可有效测量目标距离 ? 单基地系统的发射机与接收机隔离不是问题 ? 可以测量距离变化率
12
2
常见雷达波形介绍
脉冲串是一种常见雷达波形
脉冲重复频率: 占空比:
平均功率:
13
2
常见雷达波形介绍
发射脉冲串波形时可能产生 距离模糊
14
2
常见雷达波形介绍
两大类脉冲串波形:相参脉冲串和非相参脉冲串
A. 源正弦波 B.相参脉冲串 C.非相参脉冲串
从距离和径向速度 二维进行分辨
fd
fd'
fd' ? fd
fd
发射信号为参考
目标A为基准,则:
A B
tr ? ? tr
23
A的回波复包络为 u (t)
B的回波复包络为 u(t ? ? )e? j 2? fdt
为两个目标距离差对应的时间间隔
为两个目标相对径向速度差对应的 多普勒频移
t
2
距离模糊函数与距离分辨率
第一章 雷达系统基础
1.1 常见雷达波形 1.2 雷达信号模糊函数
1
2
背景
发射机 收发开关
天线
终端 显示
信号 处理
接收机
R
目标
雷达依赖天线向空间 辐射电磁波,并 接收 由目标散 射的电磁波,以确定目标的存在。
雷达发射的电磁波具有一定的形式:连续波或脉冲 串,单频的或调频、调幅或相位编码的
2
2
雷达波形要求
衡量两个信号为“ 不同”的参数:均方差值
设信号的可分辨程度
对
24
误差的均方,或均方差
2
距离模糊函数与距离分辨率
距离分辨问题描述
fd
B
A
?
tr ? ?
tr
A、B相对雷达径向速度相同
仅有距离差
时延
以目标A为基准,则: A的回波信号为 B的回波信号为
15
2
常见雷达波形介绍
相参脉冲串频谱
?
f0
Tr
f0
相参脉冲串频谱
sin x x
fr
1 ?
16
非相参脉冲串频谱 2
常见雷达波形介绍
相参脉冲串雷达的速度模糊问题
有多普勒频移的 CW信号的频谱图
相干脉冲串频谱 (固定目标-无多普勒频移 )
将含有多普勒频移目标的中心波瓣区域展开
中心波瓣 滤波器
有多普勒频移 的目标回波
t 当? ? 0时,A、B完全不可区分
用两个信号的均方差来衡量它们距离上的差别
25
2
距离模糊函数与距离分辨率
均方误差
?? 0
信号能量
常数
26
取决于该积分式
2
距离模糊函数与距离分辨率
距离模糊函数定义:
数学上
信号的复自相关函数
雷达上 信号的距离模糊函数。或看
作是信号 通过其匹配滤
波器
后的输出响应。
它在 时输出为最大值。
PRI捷变波形 极化捷变信号 脉冲压缩信号 冲激信号
19
2
第一章 雷达系统基础
1.1 常见雷达波形 1.2 雷达信号模糊函数
?
?d
20
2
基本概念
雷达分辨力 在多目标环境中,雷达区分两个或两个以上邻
近目标的能力( 距离、速度 、角度进行分辨)。
发射信号波形决定 天线方向图(波束)
波形设计
理论依据、工具
17
2
常见雷达波形介绍
脉冲重复频率 (PRF)
不同类型PRF的距离、多普勒频率模糊特性
PRF
距离
多普勒
低
不模糊
模糊
中
模糊
模糊
高
模糊
不模糊
PRF参差 PRF交织
在一个停留时间 内有多种PRF
18
2
常见雷达波形介绍
连续波信号 相参脉冲串信号 频率捷变信号 频率分集信号 双脉冲信号 双路信号 分布频谱信号 沃尔什函数信号 ( 《雷达系统》 , 向敬成. 表1-1)
电磁波 直观解释是发射到空中的能量,这种能量部 分以电场的形式存在,部分的以磁场的形式存在。 电磁波的基本特性有:速度、方向、极化、强度、 波长、频率和相位。
波形 是波的周期变化量的瞬时值沿时间表示的图形
4
2
基本概念
相位 是在单个周期内波或信号与同频率参考信号相 一致的程度。通常用信号幅度正向 穿越零点 的这个 时间点来定义,因此,信号的相位是这些过零点相 对于参考信号过零点的 超前量或滞后量。
要实现目标的有效检测,雷达信号波形必须同时 满 足以下条件 :
足够的能量(看得见)
足够的目标分辨率(看得准)
对需要的回波有很好的选择、屏蔽能力 (选择、对抗能力)
选择的雷达波形要与 雷达用途 、目标类型 、目标环 境“匹配”
3
2
基本概念
波 是一种可在媒介或空间中传播的,连续或突发的 周期性扰动,其到达均值的位移是时间,或空间, 或两者的函数。
频率调制连续波( Frequncey ModulatedCW,FMC)W
脉冲( Pulsed)
9
2
常见雷达波形介绍
CW Radar
? 发射连续的单频正弦波信号 ? 发射机与接收机始终处于工作状态 ? 通过多普勒频移发现目标
-可有效测量目标的距离变化率
? 单基系统存在收发隔离问题,双基系统较好 ? 简单的CW雷达无法测量距离
模糊函数
决定雷达分辨力的三个因素:
信噪比 信号形式 信号固有分辨力 信号处理方法
21
2
基本概念
模糊函数 研究雷达波形的 数学工具 ,反映了雷达波形在
距离和径向速度 二维上的精度和分辨力 波形性能可通过所定义的 分辨常数 和模糊函数
进行比较 模糊与分辨是对立概念。
22
2
目标分辨场景
目标分辨问题
有两个 相同 的点目标 A和B,它们相对雷达是 视 角相同 的邻近目标
参考信号
5
2
基本概念
波前 是一个假设的面,在这个面上辐射电磁波的相 位处处相等。
极化 电场方向即为极化方向。
电磁波
电场 磁场
垂直极化
水平极化
6
2
RF波形属性
基本概念
积累(同相)
部分积累(不完全同相)
抵消(反相)
非相参信号(噪声)
7
2
雷达系统及其波形
雷达波形 及其指标 是决定任何雷达系统 设计 与性 能的基本部分