automod简体中文教程 6_PathMover2
AutoMod基本操作
AutoMod學生版與專業版之切換 (3/3
)
底下的License Server的對話視窗中,只要輸入License Server Name即可;若點選Password Version則會出現輸入授權碼 (Authorization Codes)的對話視窗,使用者需根據購買專業版時, 公司所給予的授權碼輸入textbox中,並檢查其checksum與所附的是 否相同,若有不同一定是輸入錯誤所致。若點選學生版則會自動進入 AutoMod,但會有學生版使用上的限制。
刪 除
AutoMod學生版與專業版之切換 (2/3
)
在上面的Authorization視窗,我們可以根據需求點選所 要設定的版本。例如若要設定為單機專業版則點選 Password Version,若要定義為Server專業版則點選 License Server,若要定義為學生版則點選Student Version即可。
第二節 AutoMod基本架構
Auto Mod
檔案 程序 子 系統 系統 系
統
執行 分析 系統 系統
子系 自系 路統 輸系 天機 橋存 管
模統 動統 線 送統 車系 式槽 線
式
倉 儲
移 動
帶 系
系統 統
起 重系 統
與 儲
第三節 AutoMod基本概念
程序系統(Process System) 搬運系統(Movement System) Loads 擺放Loads的區域(Territory)和空間
關閉AutoMod (1/2)
關閉AutoMod (2/2)
AutoMod學生版限制 (1/4)
在AutoMod的學生版中建構模式會有實 體上的限制,一個模式中實體不能超過 200個,而11.0版以前的版本限制為100 個,這些實體指的就是如人員、設備、 儲存區等等。
automod入门
automod入门W ELCOME TO A UTO S IMULATIONS O NLINE T UTORIALSThis online book contains four tutorials that are designed to get you startedusing the AutoMod?software.Each tutorial has a table of contents and anindex.Beginning AutoModThe Beginning AutoMod tutorial provides basic training for AutoMod,tak-ing you through the steps of creating,editing,and running a model.You arealso introduced to AutoMod code,conveyors,queues,and resources. Drawing ACE GraphicsThe ACE tutorial takes you through a step-by-step procedurefor building atruck.This truck may be used to represent an automated guided vehicle(AGV)in a path mover movement system.Using KinematicsThe Kinematics tutorial is divided into two sections.The first sectionteaches you how to use a kinematic graphic as a vehicle in a movement sys-tem.The second section teaches you how to define and configure amachine for a kinematic system.Vehicle ProceduresThe Vehicles Procedures tutorial is an advanced tutorial that teaches youhow to control the movement of vehicles using vehicle procedures.1999by AutoSimulations,Inc.All rights reserved.No part of this book shall be reproduced,stored in a retrieval system,or transmitted by any means,electronic,mechanical,or otherwise,with-out written permission from AutoSimulations,Inc.No patent liability is assumed with respect to the use of information contained herein.While every precaution has been taken in the preparation of this manual,AutoSimulations,Inc.assumes no responsibility for errors or omissions.Neither is any liability assumed for damages resulting from the use of the information contained herein.Printed in the United States of America.AutoSched,AutoMod,AutoPlan,AutoSimulations,AutoStat,Au toView,Power to Take Control,and Real Time Dispatcher aretrademarks or registered trade-marks of AutoSimulations,Inc.Other product names may be trademarks or regis-tered trademarks of their respective owners.。
AutoMod基本操作与简介
程序系統 (Process System)
(2/2)
Process(流程程序):模式中控制Loads移 動的程序,一個模式雖然只有一個程序系 Loads(工作主體):模式中模擬的主體, 統,但該程序系統可包含一個以上 如零組件、原物料、顧客等,以及設定各的 Resources(資源或設備):模式中處理Loads Process,也是撰寫程式邏輯的地方。 States(狀態):為顯現Resources或搬運系統 種Loads屬性(Attributes)的地方。 所需要的資源,如機器設備、作業人員等 在模擬過程中的各種狀態,可依系統預設 Queues(等候區):Process System中唯一的 ,以及各種資源屬性設定的地方,如資源 Order Lists(命令列表區):一種邏輯暫存區 的定義來顯現各種狀態,或自行定義各種 territory,也是模擬模式中Loads等待的區 的個數、資源容量、加工時間等等。 ,在配合作業需求下使Loads移動或等待的 Blocks(區塊):模式中用來控制長方體區塊 所要呈現的狀態。如Resources是工作中、 域,可當作為模式中的暫存區。 Variables(變數):模式中全域型變數(global 工具。可用來暫存Loads並使Loads在適當情 內允許Entities數量的實體工具,以用來控 閒置中或維修中等,也可進行各種狀態的 variables)的設定,模式執行完畢後AutoMod Counters(計數器):一種類似正整數變數的 況下,繼續其作業或被指示到其他的流程程 制模式中Loads或車輛碰撞的情況。 統計結果,如工作站或輸送帶之總作業時 Functions(函數):用來啟動某種作業進行或 並不會統計其值。 計數器,可當作資源的處理容量(capacity)來 序,也是將模式由推式(push-type)轉變成拉 間、閒置作業時間、維修作業時間等。 是數學運算的一種集合指令,與一般程式中 Subroutines(副程式):不同的程序須處理相 使用,或用來計算一連串的物品通過作業處 式(pull-type)的一種實體邏輯工具。 的函數有相同意義,只是AutoMod內定了很 同的動作時,可使用subroutines以減少程序 Source Files(程式來源檔案):用來撰寫模式 理的數目,模式執行完畢後會有相關的統計 Label(標籤):可用來將模擬的訊息,動態 多系統的Functions,能以程式的方式呼叫, 的撰寫,並使未來模式的維護更為便利,與 程序(procedures)及functions與Subroutines的 資料。 資訊顯示在模式執行的視窗上的一種實體工 Tables(資料表格):可將模擬所得到變數的 以進入到模擬事件(event)或狀況(status)的階 一般程式中的副程式有相同的用途。 地方。 Type(格式):為一種屬性、變數及函數的輸 具。 資料,以頻率表格(frequency classes)的方式 層,對模式作進一步彈性與深入的控制。 Business graphics(商業統計圖表):提供 入標準格式。 序 , 與 一 般 統 計 上 所 用 的 Random streams(亂數串列):亂數串列取樣 將如pie 分 類 排 資 料 chart、bar chart、time line等模擬過 Run的設定。 Control(執行控制):模擬時間 histogram有相似的功能,但允許我們作詳細 程中變數或Entity屬性的動態統計數據圖 、次數、統計資料等的設定。 的設定。 表。
AutoMod基本操作教学内容

項則所有實體都將變成線框架構(Wire-frame)。 Friction:勾選此項,當你在調整調整圖形大小或旋轉圖形時,滑
鼠放開改變即停止,反之若清除此項,當你在調整調整圖形大小 或旋轉圖形時,必須按空白鍵或去勾選Friction選項,其改變動作 才會停止。
執行模式 (2/3)
執行模式視窗分成三個部分
模擬視窗
此視窗顯示出模式的佈置(layout)並以3-D動畫方式呈現。
狀態視窗(status)
此視窗顯示出目前模擬時間及模擬狀態是處於中斷或正在進行 中。
訊息視窗(message)
此視窗顯示出關於此模式執行過程中的輸出或錯誤的訊息。
AutoMod
AutoMod
The End
AutoMod
AutoMod環境
在整個AutoMod軟體中,主要可分成兩個環境:
編輯環境 提供使用者建構模式的環境及各項參數的設定。
模擬環境 可利用模擬環境進行模擬以獲得相關的統計資料, 並將模式以動畫方式呈現。
AutoMod
執行模式 (1/3)
AutoMod
AutoMod
第四節 範例練習 (2/2)
在建模完成後,以Run Control設定模擬8小時,分 析:
文件查核區域的使用效率(Util) 將卸貨停車區空間由改為2及6,並記綠各別的使用效
率(Util)、平均數量(Average)、平均卸貨時間(Av_Time) 及平均等待時間(Av_Wait)。
AutoMod
第四節 範例練習 (1/2)
模組一:AutoMod的簡介 - 建構你的第一個 AutoMod模式
uiautomator2详细使用方法
uiautomator2详细使用方法下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by the editor. I hope that after you download them, they can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, our shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!UIAutomator2是一款功能强大的自动化测试框架,被广泛运用于Android应用程序的UI测试。
AUTOMODE 课件
2011-9-8
物流仿真
2
1 AutoMod 操作
启动 AutoMod AutoMod的文件结构 导入模型 编译模型 运行窗口控制:鼠标和 View Control 运行 AutoMod模型 模型中的实体
2011-9-8
物流仿真
3
1.1 导入模型Import model
菜单: 菜单:Model Open; AutoMod安装目录\demos\gswa\examp02-1\ 正确结果: 显示loading信息 importing or reading the different systems creating entities and paths 显示模型窗口编辑窗口
2011-9-8
物流仿真
30
建立进程 步骤1:模型编辑处于Process系统窗口; 步骤2:Process工具条,Processes New; 步骤3:键入要新建的进程名称,如Pstart ;
2011-9-8
物流仿真
31
建立Load 步骤1:模型编辑处于Process系统窗口; 步骤2:Process工具条,Loads New; 步骤3:键入要新建的Load名称,如L_start; 步骤4:设置其他属性,如产生属性,起始Pstart,每5 分钟产生1个; 步骤5:保存;
2011-9-8 物流仿真 29
作业1
平均间隔5分钟(按照指数分布exponentially distributed ),有1辆卡车到达; 卡车将等待7-13分钟(按照distributed uniformly分布 ); 向消息窗口输出等待的信息; 等待结束后,卡车离开系统。 (建议加上两个Queues,便于看效果)
2011-9-8
物流仿真
automod简体中文教程 3_Conve

12
Applied Materials Confidential
系统定义的属性
load type
─ 保存实体类型名称的字符串属性
priority
─ 保存优先级的整型属性,缺省值为0
current process
─ 单元类型属性,保存load所属的当前进程
absolute clock(ac)
– 记录系统从仿真开始的时刻经过的时间
11
Applied Materials Confidential
语法 if … then … else
if 关系式 then 命令语句 else 命令语句 if 关系式 then 命令语句 else if 关系式 then 命令语句 else 命令语句 复合语句 if 关系式 then begin 命令语句1 … 命令语句n end 命令语句超过2 命令语句超过2个的时候要用到 复合语句
4
Applied Materials Confidential
Conveyor 画图工具条
跟我做:新建模型,新建conveyor系统:conv1; 进入conveyor编辑窗口,出现画图工具条
– – – – – – Single line: 单一直线 Single arc:单一圆弧 Continuous:连续的 Connected:连接的 Fillet:链接,剪切 Station:位置点
16 Applied Materials Confidential
8
Applied Materials Confidential
语法: 语法:move into
move into
– 作用:将实体移动到新的域( territory)中; – 语法: move into 下个域的名称 ; – 域的命名规则: systemname.stationname
pythonUIAutomator2使用超详细教程
pythonUIAutomator2使⽤超详细教程⽬录⼀、环境要求⼆、介绍三、库地址四、安装五、应⽤及操作⼀、环境要求python 3.6+android 4.4+⼆、介绍uiautomator2 是⼀个可以使⽤Python对Android设备进⾏UI⾃动化的库。
其底层基于Google uiautomator,Google提供的uiautomator库可以获取屏幕上任意⼀个APP的任意⼀个控件属性,并对其进⾏任意操作。
三、库地址四、安装1、安装uiautomator2pip install --pre uiautomator2pip install pillow (如果需要截图,可安装这个库)2、设备安装atx-agent⾸先设备连接到PC,并能够adb devices发现该设备。
执⾏下⾯的命令会⾃动安装本库所需要的设备端程序:uiautomator-server,atx-agent,openstf / minicap,openstf / minitouch# init就是所有USB连接电脑的⼿机上都安装uiautomator2python -m uiautomator2 init# 指定⼿机安装uiautomator2,⽤ --mirrorpython -m uiautomator2 init --mirror --serial $SERIAL# 嫌弃慢的话,可以⽤国内的镜像python -m uiautomator2 init --mirror最后提⽰success,代表atx-agent初始化成功。
3、安装weditor有了这个,⽅便我们快速的识别⼿机上的元素,⽅便写代码pip install -U weditor安装好之后,就可以在命令⾏运⾏ weditor --help 确认是否安装成功了。
Windows系统可以使⽤命令在桌⾯创建⼀个快捷⽅式:weditor --shortcut在windows cmd中执⾏上述命令后,会在桌⾯上创建⼀个快捷⽅式,如下图:启动⽅法:⽅法1.命令⾏直接输⼊ weditor 会⾃动打开浏览器,输⼊设备的ip或者序列号,点击Connect即可;⽅法2.桌⾯上双击WEditor快捷⽅式即可;⽅法3.命令⾏中执⾏ python -m weditor启动后如下图:五、应⽤及操作调⽤uiautomator2的过程配置⼿机设备参数,设置具体操作的是哪⼀台⼿机抓取⼿机上应⽤的控件,制定对应的控件来进⾏操作对抓取到的控件进⾏操作,⽐如点击、填写参数等。
专业版与学生版(AUTOMOD automod)
2-1-11 AutoMod 学生版限制在 AutoMod 的学生版中建构模式会有实体上的限制,一个模式中实体不能超过200 个,而11.0 版以前的版本限制为100 个,这些实体指的就是如人员、设备、储存区等等。
此外,移动系统部分,只有Conveyor 系统及Path Mover 系统可供使用。
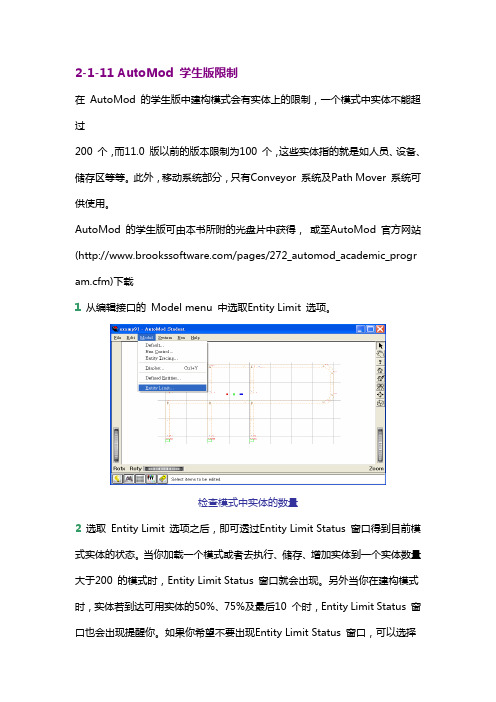
AutoMod 的学生版可由本书所附的光盘片中获得,或至AutoMod 官方网站(/pages/272_automod_academic_program.cfm)下载1 从编辑接口的 Model menu 中选取Entity Limit 选项。
检查模式中实体的数量2 选取 Entity Limit 选项之后,即可透过Entity Limit Status 窗口得到目前模式实体的状态。
当你加载一个模式或者去执行、储存、增加实体到一个实体数量大于200 的模式时,Entity Limit Status 窗口就会出现。
另外当你在建构模式时,实体若到达可用实体的50%、75%及最后10 个时,Entity Limit Status 窗口也会出现提醒你。
如果你希望不要出现Entity Limit Status 窗口,可以选择Disable Warnings 的选项来关闭它。
模式中实体限制状态除此之外,这些实体会根据其本身之特性,被分类于不同的系统,如输送带系统、搬运系统等等。
因此为了得到更详细的实体数据,可以选择Show Entity Allocation 的选项来得到相关信息。
实体分类2-1-12 AutoMod 学生版与专业版之切换在某些情况下,我们会有学生版与专业版之间切换的需求,譬如:原先已安装了学生版,但因为已购买专业版而想改成专业版因教学需要,专业版数目不足而需改为学生版要将网络Server 专业版改为单机专业版要将单机专业版改为网络Server专业版我们可以不用重新安装而透过底下所介绍的小技巧来达成。
automod简体中文教程 2_Queue

nextof分布表示顺序循环的选择 nextof可以选择实体或者数值
send to nextof(P1,P2,P3) set V1 to nextof(1,2,3,4,5) move into nextof(Q1,Q2,Q3,Q4) wait for nextof(12,34,45) min 例如:把load顺序分配到三个队列中 begin p_work arriving move into nextof(Q_Wait(1),Q_Wait(2),Q_Wait(3)) end
2
Applied Materials Confidential
队列的图形表示
默认的队列图形是4x4x4 ft. 的立方体 按照以下步骤设置图形
– – – – – 点击Queues按钮 用鼠标选择需要设置图形的资源或队列 点击Edit Graphic 按钮 点击Place按钮 点击建模窗口中的工作区域放置图形
8
Applied Materials Confidential
参考逻辑
begin move move wait end P_server arriving into Q_big into Q_little for 30 sec
9
Applied Materials Confidential
nextof
AutoMod培训教程
北京艾克斯特信息技术有限公司 王爱娟
Applied Materials Confidential
第二讲 队列(Queue) - 简介
在Process系统中只有队列是域,可以供实体停留 队列可以不是先进先出(FIFO) 队列的容量可以由用户设定,缺省容量为1 表示队列的缺省图形是立方块,也可以采用用户定义的图 形 队列必须使用唯一的名称,队列可以是数组 自动保存队列的统计数据
Auto mod的简单操作指南
Auto mod课程笔记1、auto mod快捷键⑴s:放大Shift + s:缩小⑵x:沿着x轴旋转(顺时针)Shift + x :沿着x轴旋转(逆时针)⑶y:沿着y轴旋转(顺时针)Shift +y :沿着y轴旋转(逆时针)⑷z:沿着z轴旋转(顺时针)Shift +z :沿着z轴旋转(逆时针)⑸w :将原来的框架状的实体填充为完整实体,即“turn solids”⑹v :顶视图,相当于“top view”⑺h :帮助⑻p :开始运行模型,相当于“continue”⑼d :程序运行速度减慢Shift + d :程序运行速度加快⑽g :程序仿真运行结束,相当于“turn off animate”⑾ctrl + m :先选中相应的程序段,然后同时按ctrl + m,则可以将相应的程序段变为注释语句,主要用于修改、检查source file中的程序的错误。
2、每个模型只有一个process(逻辑控制系统),但每个process含有多个子processes,即是编辑界面左边的命令框中通过点击process按钮建立的子processes3、load表示处于物流中的“物”,而processes这些子进程是针对load的4、load实体占据的空间称为“域territories”,没有load,则进程不会被执行。
5、auto mod 建模过程⑴打开auto mod程序⑵选择“file”中的“new”,建立新的仿真文件夹和仿真文件,切记文件和文件夹必须为英文字母,不能使用中文汉字等。
⑶点击编辑界面左边命令框中的“process”命令按钮,根据需要建立子进程⑷点击编辑界面左边命令框中的“load”命令按钮,根据需要建立进入本物流系统的物品,并通过点击弹出对话框中的“new creation”进行参数设置。
其中应:点击“first process”命令按钮,确定该物品所需要经历的第一个进程通过选择“distribution”,确定该物品的到达概率分布。
automod简体中文教程 7_ASRS

货区(Zones) 货区 由若干货位组成
9
Applied Materials Confidential
10
Applied Materials Confidential
语法
move into wh.pd1(2) Move into wh.zone1(1) Move into wh.zone1(AisleNumber,bay,tier)
14
Applied Materials dential
货区的设置
15
Applied Materials Confidential
速度参数设置 Horizontal Velocity: 180m/min Vertical Velocity: 85 m/min 工作点
– Pd1:bay 0,Tier 1
11
Applied Materials Confidential
堆跺机(S/RM) 堆跺机 建立AS/RS后,堆跺机自动建立 与Pathmover系统中的小车类似 -注意:每巷道只有一台堆跺机 堆跺机参数与load type相关
12
Applied Materials Confidential
作业(model_asrs)
4
Applied Materials Confidential
5
Applied Materials Confidential
6
Applied Materials Confidential
货位(P&D) 货位 取、放货物的位置
7
Applied Materials Confidential
8
Applied Materials Confidential
AS/RS 概述 续) 概述(续 AS/RS与Pathmover相似 -货架与路径 -货格、货格区与控制点 -堆跺机与小车
AutoMod安装方式_126

AutoMod12.6 软件安装方式
在您采购AutoMod 软件并获取相应的硬件License 和软件安装包以后,
您可以按以下步骤操作:
1、双击打开安装文件。
2、选择安装路径,注意路径当中不能有空格。
3、点击Yes 同意安装协议。
4、选择安装形式,建议选择Full Installation(全部安装)。
5、选择在“开始”菜单中的图标名称。
6、选择“ HO M E”环境。
7、如果您使用的是服务器授权,请在此输入您的名称。
如果不是,请不要填写
任何内容。
8、请在此处选择No。
9、点击OK。
10、点击OK。
11、开始安装。
12、完成安装。
13、您会找到一个图标“Simulation License Manger”,在此处输入您的电子
License 信息,插上硬件License,软件就可以正常使用了。
automove和autoitem详细使用说明
automove和autoitem详细使用说明韩国bot 的automove 和autoitem详细使用说明 --yfzh2012 automove 和autoitem 是半自动操作.所以手动登录之后你的角色(char)不会做任何事情,所有的任务都要通过按键和命令方式进行。
automove 也需要设置相关每个角色配置文件,否则采用的是默认角色配置文件,通常automove 只用来练小号,倒装备等,一般无需特别设置,采用默认角色配置文件也没什么问题。
一、automove 登录后角色状态说明1、automove 登录后为标准单人模式,顶部菜单为金色automove 字样,可以采用, 来回切换到autoitem 模式倒装备,但是不能切换到autohunt(autohunt 是全自动功能)。
标准模式,仅仅能支持BOTASS 界面按键设置里的default 加automove 按键功能,主要的功能是:自动map、半自动任务寻路,半自动踩WP, 自动打怪当前地图,自动做主要任务。
强调下 default 按键设置里最常用的:重新加载脚本a、单人map 功能键自动寻路,可以在城外任何场景,顶部菜单出现当前地图的任务闪烁(不会超过2个任务地点)时使用,按一次就是选择自动去 1 号目标地,连击2次就是去2号目标地。
小键盘<6> 只能在城里使用,自动开始全部踩wp(只会从当前act 开始)。
小键盘 <7> 只能在城外使用,自动去前一个wp 小键盘 <8> 只能在城外使用,自动到当前的wp小键盘 <9> 只能在城外使用, 自动去下一个wp大键盘 <\> 自动找附近的神殿大键盘即边上的windows 菜单功能快捷键自动抓取神殿(没什么用已经走到边上自己点下就行了)b、自动打怪练级小键盘 <4> 开启主动打身边怪物模式,否则只会傻站。
大键盘的句号 <.> 按一次是自动清除身边25码范围的怪物,双击是清除当前地图区域的所有怪物(自动练级)大键盘 <-> 和<=> 用来加减小鸡血限的百分比,按一次1%,双击是全满或者全减100%自动做主要13个任务,可以在botass 的automove 中自动做任务选项进行设置。
欧洲卡车模拟2皮肤MOD自作详细教程BY:Xcheng
欧洲卡车模拟2 皮肤MOD自作详细教程 BY:Xcheng本教程适合Euro Truck Simulator 2在制作MOD前给你补充点Euro Truck Simulator 2 文件系统的作用等(能够忽略因为我以前也不明白是干什么不明白一样做MOD 若是想成为MOD Master对你有帮忙终归我不是MOD Master)补充部份::要紧寄存99%的都是引导等数据文件Base.scs:要紧寄存99%以上出了数据之外的文件包括地图文件声音文件材质文件模型文件开始画面贴图文件等后面的就省略了太多了终归有爱好的自己去发觉大部份MOD都是源于此2文件部份MOD的卡车配件独立车头独立货柜模型等都是导入此文件通过def引导完成的终归说不清楚终归那个文件很有趣自己去发觉它的秘密去吧!以后会有更多说明!今日重点:预备软件:Adobe PhotoShop 5(注意不是CS5 在低的版本用不了少DDS插件不方便等)上面那个是CS6版本的下载地址完全够用新版我就不早了能够自己去下载已安装的能够跳过DDS插件(NVIDIA Texture Tools for Adobe Photoshop)那个是和PS对应的看清楚系统位数尽管老黄说支持到CS6只是CC完全支持 CC 2021不清楚各类车型UV图(能够自己转只是我没那技术也没功夫去折腾了为了省事)(提取码:c085)专门鸣谢:嗨总(由嗨总提供的)紧缩软件:那个我就不多说了建议用winrar或以上版本低版本有时候不靠谱要出事其它紧缩软件也行终归随意你好人做到底(SCS自己的拆包工具想探讨上面那2文件夹用的本次MOD制作可能用不到因为我用的现成的做的)官网下载:国内网盘:(提取码:eddf)本来不想上传的想大伙儿都去SCS支持下的可是国内。
算了工具都是齐全了今天介绍的是依维柯Stralis Hi-Way车型的皮肤MOD制作教程其它车型通用只是有个文件夹改了罢了我等会会说明XXX:下面的XXX都是代表可替换内容def\vehicle\truck\iveco.hiway\paint_job\那个是皮肤的引导文件XXX是引导的名字能够自概念不能为中文。
仿真(AUTOMOD automod)

AutoMod基本操作與簡介這一章的內容主要分成三個部分,第一節AutoMod基本操作主要是讓初學者能儘快地熟悉AutoMod軟體的操作環境,包括如何去開啟一個模式、建構一個模式等等,第二節AutoMod基本架構主要是讓使用者了解各系統模組的功能及特性,第三節AutoMod基本概念則是建立使用者在使用AutoMod建構模式時應該了解的基本概念。
2-2第一節 AutoMod 基本操作在本節中我們將針對AutoMod 的基本操作進行初步的介紹,包括如何開啟AutoMod 的介面、如何開啟一個模式、如何儲存一個模式,以及如何執行一個模式等相關的操作。
學習任何一套軟體的使用,初學者必須身體力行,花時間努力的研究並且實際去動手體驗,才是學習好軟體的不二法門。
學習AutoMod 當然也不例外,因此讀者若願意多花些時間研讀本書的內容,並且遵循書中的內容多做練習,相信即可以透過AutoMod 建構出有效的模式。
在安裝AutoMod 時,可選擇Standard(標準)模式或VR(虛擬實境)模式,其中本書的範例是以AutoMod 安裝在C 磁碟機及VR 模式呈現,所有範例皆可在AutoMod 11.0以上的版本實際練習與操作。
2-1-1 AutoMod 環境在整個AutoMod 軟體中,主要可分成兩個環境,編輯環境及模擬環境,其中: 編輯環境:提供使用者建構模式的環境及各項參數的設定。
模擬環境:可利用模擬環境進行模擬以獲得相關的統計資料,並將模式以動畫的方式呈現。
2-1-2 開啟AutoMod當你順利完成AutoMod 的安裝後,在程式集中點選AutoMod 12.0 (VR Graphics)中的AutoMod 選項即可打開AutoMod 的編輯介面。
這個編輯介面就是建構模式及定義模式相關參數的環境。
AutoMod 編輯介面AutoMod 基本操作與簡介2-32-1-3 建構模式要在AutoMod 的編輯介面中建構一個模式,你可以選擇建構一個新的模式或是開啟舊模式進行編輯。
AutoForm R6基本操作和设置

入口
小的高度策略
增大圆角
保持圆角( 入口向下)
约束 挺举
2.11.3 拉延筋的设置
自适应线 拉延筋
实用文档
转下页
拉延筋最 大挺举力
2.11.3 拉延筋的设置
实用文档
一般通过修改筋的高 度来调整筋阻力系数
阻力系数
实用文档
2.11.4 定位销的设置 如果压料面有高低差,压料过程中料片攒动,需要加上定位销。
对拉延和成形零件检查基本的零件成 型型和评估最小料片
添加料带方案
评价级进模零件最小料片和定 义料带方案
选择2次成形面
选择基本面 本步骤前提
选择应用
实用文档
2.7 生产线的布置 这里可以添加、删除工序 如下图我们添加了拉延、修边冲孔、翻边、回弹进行分析。
生产线:需要哪个 工序就把相应的工 序内容拖拽进来。
实用文档
斜楔角度
2.13 翻边整形
工具体名称 可使用汉字
压料体
翻边刀块 凸模
实用文档
选择几何体 具体设置同 修边(2.12)
实用文档
2.14 CAM选项 方位角表示将切边方向投影到XY平面的方向与X 轴夹角,倾斜角表示切边方向与XY平面的夹角。
AutoMod系统建模与仿真实验指导书
AutoMod
系统建模与仿真
实验指导书
北京邮电大学 自动化学院 北京亿特克科技有限公司 答案整理
目录
概述 AutoMod 软件简介和仿真试验综述 .............................................................................. 1 实验一 简单流水作业线仿真 ............................................................................................... 8 实验一 简单流水作业线仿真详细解析 ........................................................................... 11 1 新建一个模型 ............................................................................................................. 12 2 定义各种实体单元 ..................................................................................................... 13 3 绘制模型平面布置图 ................................................................................................. 20 4 定义 Source File .......................................................................................................... 21 5 设定 Run Control ......................................................................................................... 22 6 模型运行 ..................................................................................................................... 22 7 查看运行结果 ............................................................................................................. 25 8 模型优化 ..................................................................................................................... 26 附录 Source File 的内容 ................................................................................................ 27 实验二 传送带系统仿真 ..................................................................................................... 30 实验二 传送带系统仿真详细解析 ................................................................................. 33 1 创建一个新的模型 ...................................................................................................... 33 2 定义各种实体单元 ...................................................................................................... 38 3 绘制模型平面布置图 ................................................................................................. 41 4 定义 Source File .......................................................................................................... 41 5 设定 Run Control ......................................................................................................... 42 6 定义 Business Graphics ............................................................................................... 42 7 模型运行 ..................................................................................................................... 44 8 查看运行结果 ............................................................................................................. 45 9 模型优化 ..................................................................................................................... 46 附录 Source File 内容 ..................................................................................................... 46 实验三 循经运动系统仿真 ................................................................................................. 49 实验三 循径运动系统仿真详细解析 ............................................................................. 53 1 创建一个新的模型 ..................................................................................................... 53 2 定义 Path Mover 子系统 pm ...................................................................................... 55
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
16
Applied Materials Confidential
作业1(续 作业 续) -中:由AGV送到检验区域,然后进入等待队列等待检验, 检验完成后进入队列等待AGV,然后由AGV送到2th装配 点,每个托盘检验花时40~50秒(均匀)
17
Applied Materials Confidential
Park list定义空机车可以停车的地点
– – – – – – – – – – – – – 车辆没有工作时将要搜寻park list 从顶到底搜寻 如果列表中某项的停车在途限制已经到达,车辆跳过这项 如果车辆寻找到一个停车位置,它将行进到那个控制点 如果车辆找不到停车点,它将在当前位置休眠 从运动系统面板中选择park list 单击new 选择想创建park list的地点 单击new 单击Add After 在Add work list窗口中选择地点,单击Add 对要添加到此点的所有点重复此操作 完成单击Done
– named list可以插入到其它行程表 – named list可用来定义开始仿真时车辆位置 – 模型中可以有多个named list
机车如何使用Name list:
5
Applied Materials Confidential
创建name list 创建
创建name list的方法
– 在path mover的面板中选择Name List – 单击New – 输入年name list的名称 – 单击create,打开编辑name list窗口 – 由右边窗口的location list中选择要添 加的点 – 单击Add After,选择的点出现在了左 边的窗口中 – 单击Done
创建work list 创建
8
Applied Materials Confidential
机车如何使用work list 机车如何使用 例1
– 机车到达cp1点 – cp1点没有工作任务 – cp1的work list如下所示
9
Applied Materials Confidential
Park list
13
Applied Materials Confidential
START – 空车 并且未分配任务
该地点有未被 预订的货物吗? 预订货物 Yes 寻找工作 No 该地点有工作 任务列表吗? Yes No
Work list
park list
No 找到一个货物? Yes Yes 预订货物? 寻找停车地点 找到了吗? No 进入休眠 该地点有停 车列表吗? No
10
创建park list的方法如下
Applied Materials Confidential
创建park list的方法 创建 的方法
11
Applied Materials Confidential
机车如何使用park list 机车如何使用 机车在cp15点空闲 机车搜寻cp15点的work list没有找到工作 Cp15点的park list 定义如下所示
Location
3
Applied Materials Confidential
形成安排
我们将要学习3种行程表:
– Name list – Work list – Park list
4
Applied Materials Confidential
Name list Name list:用户定义控制点组
6
Applied Materials Confidential
Work list Work list是机车搜寻等待被拾取的load的地址列表 -车辆从顶到底搜寻work list -如果在work list 上某一项没work,搜寻下一项 -如果车辆找到work,它讲声明这个实体 -声明实体后,车辆将要去运载这个实体 创建work list的方法如下
作业2(续 作业 续) 重:由AGV送到准备区域,进入队列,2小时后准备工作完 成,进入另一队列等待AGV将其送到3th装配点
18
Applied Materials Confidential
12
Applied Materials Confidential
行程表选择
List contents:
– All – Name list – 控制点
List modifiers
– Closer than – Order than
List search options:
– At – Closest – oldest
机车如何使用形成安排列表
– 机车形成安排列表是所有机车的参数,机车通过搜寻机车形成安排表寻找 工作和停车地点 – 例如:AGV.cp1 – 当机车通过搜寻机车形成安排表找到工作时,自动生成工作任务
2
Applied Materials Confidential
小车载货的运行方式
Load
Vehicle
Yes
捡取货物 向货物地点运动 向停车地点运动
向货物目的 地运动
卸货
Go to START
14
Applied Materials Confidential
作业1 作业 续
15
Applied Material、中、重)
-轻:由AGV送到检验点检验,检验时托盘不离开车,检 验过程花时3~7秒(均匀),完成后送到1st装配点
AutoMod培训教程 AutoMod培训教程
Applied Materials Confidential
第八讲 机车形成安排 实体想要进入path mover系统的域,必须等待可用的车辆 来拾取 机车调度是使机车取货、送货或者停车的过程 机车形成安排表(schedule list)
– 机车寻找工作或者停车的一系列地点 – 基础行程安排将要使用行程表
– – – – – – – – 从运动系统面板中选择work list 单击new 选择想创建work list的地点 单击new 单击Add After 在Add work list窗口中选择地点,单击Add 对要添加到此点的所有点重复此操作 完成单击Done
7
Applied Materials Confidential