第十章 机械振动与电磁振荡
理论力学 第十章振动

k2
k1
δ st
r F1
k eq = k1 + k 2
δ st r
r mg
keq k1 + k 2 = m m
m
r F2
mg = k eqδ st
keq称为等效弹簧刚性系数 并联系统的固有频率为
mg k2
ωn =
当两个弹簧并联时,其等效弹簧刚度等于两个弹簧刚度的和。 这一结论也可以推广到多个弹簧并联的情形。
O
δ st
x
r F r P
则解为:
x = A sin(ω nt + θ )
表明:无阻尼自由振动是简谐振动。 其运动图线为:
x
A
x
x0
θ ωn
O
t
t+T
x
2.无阻尼自由振动的特点 无阻尼自由振动的特点
(1)固有频率 )
无阻尼自由振动是简谐振动,是一种周期振动,任何瞬时t, 无阻尼自由振动是简谐振动,是一种周期振动,任何瞬时 ,其 运动规律x(t)总可以写为: 运动规律 ( )总可以写为: x(t)= x(t+T) () ( ) T为常数,称为周期,单位符号为s。 为常数, 周期, 符号为 为常数 称为周期 单位符号 。 这种振动经过时间T后又重复原来的运动 后又重复原来的运动。 这种振动经过时间 后又重复原来的运动。 考虑无阻尼自由振动微分方程 考虑无阻尼自由振动微分方程
r F r P
x
两个根为: r1 = +iω n 方程解表示为:
r2 = −iω n
x = C1 cos ω nt + C2 sin ω nt
x = C1 cos ω nt + C2 sin ω nt
机械振动和电磁振荡
特点: 特点:
有平衡点,且具有重复性。 有平衡点,且具有重复性。
周期性振动—在 时间内运动状态能完全重复 时间内运动状态能完全重复。 •• 周期性振动 在 T时间内运动状态能完全重复。 非周期性振动—在 时间内运动状态不能完全重复 时间内运动状态不能完全重复。 非周期性振动 在 T时间内运动状态不能完全重复。
取平衡位置为坐标原点,谐振动方程写为: 解: (1)取平衡位置为坐标原点,谐振动方程写为: 其中A=0.12m, T=2s, ω = 2π T = π (s ) 其中 初始条件: 初始条件:t = 0, x0=0.06m,可得 可得
−1
φ0 = ±π 3 0.12cosφ0 = 0.06 据初始条件 v0 = −ωAsinφ0 > 0, 得 φ0 = −π 3
(1)振幅: 物体离开平衡位置的最大位移的绝对值。 振幅: 物体离开平衡位置的最大位移的绝对值。 由初始条件确定 (2)周期和频率 (2)周期和频率 周期:物体作一次完全运动所经历的时间。 周期:物体作一次完全运动所经历的时间。
x = Acos(ωt +φ0 ) = Acos[ω(T + t) +φ0 ]
f = −(h + y)ρSg + mg = −yρSg
船在竖直方向作简谐振动,其角频率和周期为: 船在竖直方向作简谐振动,其角频率和周期为:
ω=
因 得:
ρSg
m
m T= = 2π ω ρgS
2π
m = ρSh,
h T = 2π g
简谐振动的特征及其表达式
简谐振动中质点位移、速度、加速度与时间的关系: 简谐振动中质点位移、速度、加速度与时间的关系:
弹簧振子: 连接在一起的一个忽略了质量的弹簧和 弹簧振子: 一个不发生形变的物体系统。 一个不发生形变的物体系统。
第十章机械振动和电磁振荡
A ? x02 ? (v0 ? ?
v0
? x0
? ? ?
在 ? π 到 ? π 之间,通常 ? 0 存在两个值,可根据
v0 ? ?? Asin?0 进行取舍。
三、谐振动的旋转矢量图示法 ?
旋转矢量:一长度等于振幅 A的矢量 A在纸平面
内绕O点沿逆时针方向旋转,其角速度与谐振动的 角频率相等,这个矢量称为旋转矢量。
?
?
2x
?
0
k m
?
?
2
动力学特征
4.简谐振动的运动学特征 :
位移: x ? Acos( ? t ? ? 0 )
速度:
v?
dx dt
?
? ? Asin( ? t ? ? 0 )
加速度: a
?
d2 x d t2
?
??
2 Acos(? t ?
? 0 )=
?
?
2x
——物体的加速度与位移成正比而方向相反,物 体的位移按余弦规律变化。
x = 0.12cos(πt - π 3) m
若用旋转矢量法求解 ?0 ,根据初始条件可画出 振幅的初始位置,如下图所示。 从而可得 ?0 ? ? π 3
O
x
f0
A
ω
(2) 由(1)求得的简谐振动表达式得
v ? d x ? ? 0.12πsin( πt ? π 3) m?s?1 dt
a ? d v ? ? 0.12π2 cos(πt ? π 3) m?s?2 dt
解: (1)取平衡位置为坐标原点 ,谐振动方程写为
x ? Acos(? t ? ?0 )
其中A=0.12 m,T=2 s, ? ? 2π ? π s?1
T
机械振动和电磁振荡

010203定义稳态受迫振动和非稳态受迫振动。
类型应用振荡频率电感线圈振荡的频率与电感量、电阻和电容有关,通过调节这些参数可以改变振荡频率。
振荡原理电感线圈中,当电流发生变化时,会产生感应电动势来阻碍电流的变化,从而产生振荡。
应用振荡电路是许多电子设备中的重要组成部分,如信号发生器、无线电等。
电感线圈振荡电磁场振荡电磁波传播电磁波传播原理电磁波的特性应用单摆模型描述物体在平衡位置附近往复运动的模型,可以用于描述机械振动和某些电磁振荡。
单摆的周期公式是 T =2π√(L/g),其中L是悬摆的长度,g是重力加速度。
在不同的星球或不同的重力场中,单摆的周期会发生变化,因此可以用来测量重力场的变化。
弹簧质量模型弹簧质量模型的振动方程是 m(d^2x/dt^2) = -kx,其中m 是质量块的质量,k是弹簧的弹性系数。
解这个方程可以得到振动的频率和振幅,从而可以描述物体的振动特性。
描述一个质量块在弹性力作用下运动的模型,可以用于描述机械振动和某些电磁振荡。
电感线圈模型描述电感线圈在电磁场中运动的模型,可以用于描述某些电磁振荡。
电感线圈的动态方程是d^2i/dt^2 + R(di/dt) + (1/L) *(Li) = 0,其中i是电流,R是电阻,L是电感。
解这个方程可以得到电流的时间变化,从而可以描述电磁振荡的特性。
简谐振动的数学公式简谐振动的数学公式简谐振动的特点简谐振动的描述阻尼振动的数学公式阻尼振动的描述阻尼振动的数学公式阻尼振动的特点03受迫振动的特点受迫振动的数学公式01受迫振动的描述02受迫振动的数学公式1电感线圈振荡的数学公式23电感线圈在电流变化时会产生感应电动势,从而产生振荡。
电感线圈振荡的描述i=Icos(ωt+φ),其中I为电流幅度,ω为角频率,φ为初相位。
电感线圈振荡的数学公式电感线圈的振荡频率由电路阻抗决定,与电源频率无关。
电感线圈振荡的特点机械振动在工程中的应用机器运转机械振动可以提高机器的运转效率和精度,如振动筛、振动电机等。
程守洙《普通物理学》(第5版)辅导系列-课后习题-第10章 机械振动和电磁振荡【圣才出品】
解得:
。
(2)当物体跳离平板时,物体受平板支持力为零。由(1)的结果可知,当振幅增大
5 / 27
圣才电子书
十万种考研考证电子书、题库视频学习平 台
时物体将于最高处跳离平板,即 FN1=0,所以有
,解得
。
10-6
图 10-5 所示的提升运输设备,重物的质量为 1.5×104 kg,当重物以速度
圣才电子书
十万种考研考证电子书、题库视频学习平 台
第 10 章 机械振动和电磁振荡
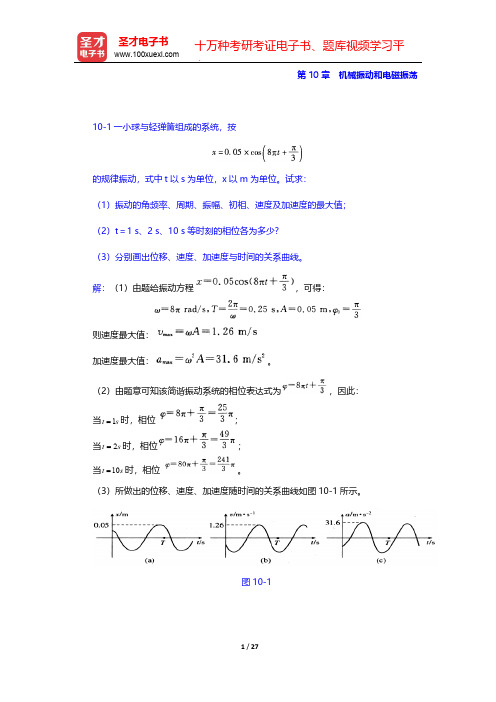
10-1 一小球与轻弹簧组成的系统,按
的规律振动,式中 t 以 s 为单位,x 以 m 为单位。试求: (1)振动的角频率、周期、振幅、初相、速度及加速度的最大值; (2)t=1 s、2 s、10 s 等时刻的相位各为多少? (3)分别画出位移、速度、加速度与时间的关系曲线。
。 物体所受力大小为:
,又
。 ,故
方向与位移的方向相反,即指向平衡位置。
(3)由于
,因此有
,解得
位置运动到 x=12 cm 处所需最少时间为: (4)由简谐运动物体的运动学方程可知,在 x 12cm 处
,又 。
,因此由起始
物体的速度为:
物体的动能为: 物体的势能为: 所以谐振动系统的机械能为:
。
4 / 27
=15 m/min 匀速下降时,机器发生故障,钢丝绳突然被轧住。此时,钢丝绳相当于劲
度系数 k=5.78×106 N/m 的弹簧。求因重物的振动而引起钢丝绳内的最大张力。
图 10-5
解:根据题意可知,机器发生故障时,重物与钢丝绳组成简谐振动系统,则有:
简谐运动系统的固有频率为: 谐振动速率的最大值为: 谐振动的振幅为: 重物在最低处时,受钢丝绳的拉力 T 和重力 mg 的合力方向向上,此时的拉力有最大
第十章机械振动和电磁振荡振动

x
F v
A
F
2
二、描述简谐振动的特征量
x(t)=Acos( t+ )
1、振幅 A (离开原点的最大距离) 2、振动圆频率 2 1 2 周期T T 3、相位 (1) ( t + )是 t 时刻的相位 (2) 是t =0时刻的相位 — 初相
3
解析法
x A o -A
x
2
x2
x1
2
t
0 A2
1
A1 x
超前、落后以小于 的 相位角来判断!!!
2 1
0 A1
x
7
例、振子的振动周期为12s,振子由平衡位置到正向最 大位置处所需的最短时间是多少?振子经历上述过程的 一半路程所需最短时间是多少? 解: 旋转矢量转过的角度为 2 最短时间为: t2 x T 2 2 3s t 2 4 T 振子经历上述过程的一半路程时 t 1 旋转矢量转过的角度为 x 6 于是: T 6 6 1s t 3 2 12 T
8
例.一谐振动的振动曲线如图所示.求、以及振动方程 x 解:t = 0时x0 A v 0 0
t =1时
x1 0
3
2
π
A
3
x
A 2
A 0
1.0 t
Φ1 =ωt1 + j =ω × 1 π =π 3 2 π 5 x = A cos (6 πt 3 )
π Φ1 = 2
v1 0
第十章 机械振动和电磁振荡 振动:
物理量 (如位移、电流 等)在某一数值附近 反复变化。 机械振动 振 动 电磁振荡
{
受迫振动 自由振动
第十章 机械振动和电磁振荡

M = −mgl sin θ
sin θ = θ −
θ
3
3!
+
θ
5
5!
− ... ≈ θ
(θ 很小时) 很小时)
M = −mglθ
2
由转动定律 令
d θ M mglθ g = =− =− θ 2 2 dt J ml l
ω2 = g l
T = 2π ω = 2π g l
振动表达式: θ = θ m cos(ωt + ϕ 0 ) 振动表达式: 由初始条件求得。 角振幅 θm 和初相 ϕ0由初始条件求得。 当θ 不是很小时: 不是很小时: 很小时 单摆周期T与角振幅的关系为 单摆周期 与角振幅的关系为
t
-A1
较早达到正最大, 若 0<ϕ 20-ϕ 10<π,则 x2比x1较早达到正最大,称x2 落后)。 比x1超前 (或x1比x2落后 。 或
x
A1 A2
x1 x2
x2超前于 1 超前于x t
O
- A2 -A1
v = vm cos(ωt +ϕ0 + ) 2
π
a = am cos(ωt +ϕ0 ±π )
π
x t=0.5 = 0.12cos(0.5 − π
π
3 dx π v t=0.5 = = −0.12π sin( π t − ) t=0.5 = −0.189( m ) /s dt t=0.5 3 π dv 2 2 a t=0.5 = = −0.12π cos(π t − ) t=0.5 = −1.024 (m ) /s dt t=0.5 3
2π
x
O
ω
, ω= 2πν
t
3. 相位(phase): ωt + ϕ0 )— 描述振动状态 相位( ) ( 初相位( 初相位(initial phase) :ϕ0 ) 相位差: 相位差: ∆ϕ = (ω 2 t + ϕ20 ) - (ω1t + ϕ10) 对两同频率的谐振动 ∆ϕ = ϕ20 - ϕ10 初相差 对两同频率的谐振动 同频率
第十章 机械振动和电磁振荡
x
A
A2
a
t t2 t1
A
0
b
v
tb
o
t
A
A ta A
2
x
π Δ 3
π 3 1 Δt T T 2π 6
16
2)对于两个同频率的简谐运动,相位差表示 它们间步调上的差异.(解决振动合成问题) x1 A1 cos( t 1 ) x2 A2 cos( t 2 )
解 ( 1)
am a x A
T 2π
2
0.314s
am a x 20s1 A
34
(2)通过平衡位置的动能;
Ek ,m a x
(3)总能量;
1 1 2 mvm a x m 2 A2 2.0 103 J 2 2
3 2 . 0 10 J E Ek,m a x
o
v A sin t
A 2
x
0.26m s
1
(负号表示速度沿x轴负方向)
21
解: A'
v0 tan ' 1 x0 o π 4 π 3π A' ' 或 4 4 π 4 因为v0 0 ,由旋转矢量图可知 '
1
x
2 0
v
2 0 2
T
2π
1 ω2πν T
9
注意
m 弹簧振子周期: T 2π k
周期和频率仅与振动系统本身的物理性质有 关,常称为固有周期和固有频率。
10
5. 常数A和的确定
x A cos( t ) v A sin( t )
36
37
x Ae
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第十章 机械振动与电磁振荡
高玉梅 编
姓名 学号 班级
一、选择题
1、下列表述正确的是( )
A 物体在某一位置附近来回往复的振动是简谐振动
B 质点受到恢复力(恒指向平衡位置的力)的作用,则该质点一定作简谐运动
C 小朋友拍皮球,皮球的运动是简谐运动
D 若某物理量Q 随时间t 的变化满足微分方程2220d Q Q dt
ω+=,则此物理量Q 按简谐运动的规律在变化(ω是由系统本身决定的)
2、如图所示,当简谐振子到达正最大位移处,恰有一泥块从正上方落到振子上,并与振子黏在一起,仍做简谐运动,则下述正确的是( )
A 、振动系统的总能量变大,周期变大
B 、振动系统的总能量不变,周期变大
C 、振动系统的总能量变小,周期变小
D 、振动系统的总能量不变,周期变小
3、把单摆摆球从平衡位置向位移正方向拉开,使摆线与竖直方向成一微小角度θ ,然后由静止放手任其振动,从放手时开始计时.若用余弦函数表示其运动方程,则该单摆振动的初相为( )。
(A) θ。
(B) /2π。
(C) 0。
(D) π 。
4、一质点做简谐振动,周期为T ,但质点由平衡位置向ox 轴正方向运动时,由平衡位置运动到1/2最大位移处所需的最短时间为( )。
(A) 14T 。
(B) 112T 。
(C) 16T 。
(D)。
18
T 5、一简谐振动曲线图如图所示,则振动周期为( )。
(A) 2.62 s (B) 2.40 s
(C) 0.42 s (D) 0.382 s
6、一质点做简谐振动,振幅为A ,在起始时刻质点的位移为
/2A ,且向ox 轴正方向运动,代表此简谐运动的旋转矢量图为( )。
(A) (B)
(C) (D)
7、弹簧振子在水平面上作简谐振动时,弹性力在半个周期内所作的功为( )。
(A) (B) (C) (D)
2kA 2/2kA 2/4kA 0二、计算题
1、一质量为0.258m =kg 的物体,在弹性力作用下沿轴运动,弹簧的劲度系数。
(1)求振动的和圆频率ox 25/k N =m T ω;(2)如果振幅2A cm =,在时物体位于0t =01x cm =处,并沿轴反向运动,求初速和初相位ox 0v ϕ;(3)写出振动的表达式。
2、曲线图如图所示,已知振幅为A ,周期为T 。
当0t =时,0/2x A =,试求:
(1)该简谐振动的表达式;(2)a 、b 两点的相位;
(3)从时的位置运动到a 、b 两态所用的时间。
0t =
3、三个沿轴的简谐振动,其表达式依次为:ox ()13cos 3x t cm =,()24cos 32x t c π=+m ,()33cos 3x t c ϕ=+m 。
(1)若某质点同时参与第一、第二两个运动,试求它的合振动表达式;(2)若某质点同时参与第一、第三两个运动,试问当ϕ为何值时,该质点合振动最强烈?(3)若某质点同时参与第二、第三两个运动,试问当ϕ为何值时,该质点合振动最弱?。