12轮系
合集下载
《机械原理》 轮系的传动比
1 2 3 H
原周转轮系角速度
1 2
3
H
转化轮系中的角速度
1H 1 H 2H 2 H
3H 3 H
HH H H 0
2.传动比计算的基本思路与方法
根据定轴轮系传动比的公式,可写出转化轮系传动比
iH
13
i1H3
1H 3H
1 H 3 H
z2z3 z1 z 2
z3 z1
“-”号表示在转化机构中1H
z3 z1
2.2 周转轮系传动比的计算
1.周转轮系的组成与类型 2.传动比计算的基本思路与方法 3.注意事项 4.计算实例
例1 已知:双排外啮合行星轮系
z1 100, z2 101, z2 100, z3 99
求:传动比 iH1
解:
i1H3
1H
H 3
1 3
H H
z2 z3 z1 z2
第7章 轮系
1 轮系的类型 2 轮系的传动比 3 轮系的功能 4 轮系的设计 5 其他类型的行星传动简介
第7章 轮系
2 轮系的传动比
2.1 定轴轮系传动比的计算 2.2 周转轮系传动比的计算 2.3 混合轮系传动比的计算
2.1 定轴轮系传动比的计算
1.传动比大小的计算 2.主、从动轮转向关系的确定
只起改变方向作用
称为惰轮
定 轴 轮 系 的 传 动 比
所 有 从 动 轮 齿 数 的 连 乘积 所 有 主 动 轮 齿 数 的 连 乘积
2.1 定轴轮系传动比的计算
2 .传动比方向的确定
平面定轴轮系 所有齿轮均为直齿或斜齿圆柱齿轮,
可用(-1)m 来确定从动轮的转动方向。
m —— 外啮合的对数。
传动比为正,说明主、从动轮转向
原周转轮系角速度
1 2
3
H
转化轮系中的角速度
1H 1 H 2H 2 H
3H 3 H
HH H H 0
2.传动比计算的基本思路与方法
根据定轴轮系传动比的公式,可写出转化轮系传动比
iH
13
i1H3
1H 3H
1 H 3 H
z2z3 z1 z 2
z3 z1
“-”号表示在转化机构中1H
z3 z1
2.2 周转轮系传动比的计算
1.周转轮系的组成与类型 2.传动比计算的基本思路与方法 3.注意事项 4.计算实例
例1 已知:双排外啮合行星轮系
z1 100, z2 101, z2 100, z3 99
求:传动比 iH1
解:
i1H3
1H
H 3
1 3
H H
z2 z3 z1 z2
第7章 轮系
1 轮系的类型 2 轮系的传动比 3 轮系的功能 4 轮系的设计 5 其他类型的行星传动简介
第7章 轮系
2 轮系的传动比
2.1 定轴轮系传动比的计算 2.2 周转轮系传动比的计算 2.3 混合轮系传动比的计算
2.1 定轴轮系传动比的计算
1.传动比大小的计算 2.主、从动轮转向关系的确定
只起改变方向作用
称为惰轮
定 轴 轮 系 的 传 动 比
所 有 从 动 轮 齿 数 的 连 乘积 所 有 主 动 轮 齿 数 的 连 乘积
2.1 定轴轮系传动比的计算
2 .传动比方向的确定
平面定轴轮系 所有齿轮均为直齿或斜齿圆柱齿轮,
可用(-1)m 来确定从动轮的转动方向。
m —— 外啮合的对数。
传动比为正,说明主、从动轮转向
轮系
=1- i1H
i1H =1-(-99×101/100×100)=1.9999 iH1=n H / n 1 =1/i1H =0.5
表示行星架H与齿轮1的转向相同。
用画箭头法标出转化轮系中各构件的转向关系,如图所示。
29
例: 如图所示周转轮系。已知Z1=15, Z2=25, Z3=20, Z4=60,n1=200r/min, n4=50r/min ,且两太阳轮1、4 转向相反。试求行星架转速n H及行星轮转速n3。
2 O1 H
1
3
3
2
n 2
H
n
O
H
n
1
1
n 3 -n H
2
3
H 1
3 2
n3H = n 3-n H n2H = n 2-n H H n1H = n 1-n H
1
a) 原周转轮系
b) 原周转轮系的转化轮系
周转轮系及转化轮系中各构件的转速
构件名称 原来的转速
太阳轮1
n1
行星轮2
n2
太阳轮3
n3
行星架H
nH
转化轮系中的转速
n1H=n1-nH
n2H=n2-nH n3H=n3-n H nHH=nH-nH=0
18
2.周转轮系的传动比计算
周转轮系的传动比(3/5)
转化轮系中,齿轮1对齿轮3的传动比
i1H3
n1H n3H
n1 nH n3 nH
z2 z3 z1 z2
一般表达式为 :
iG HKnnG K H H
n4
= n1 3000 i14 120
=25r/min, 转向如图
周转轮系的传动比(1/5)
5.3 周转轮系及其传动比计算
i1H =1-(-99×101/100×100)=1.9999 iH1=n H / n 1 =1/i1H =0.5
表示行星架H与齿轮1的转向相同。
用画箭头法标出转化轮系中各构件的转向关系,如图所示。
29
例: 如图所示周转轮系。已知Z1=15, Z2=25, Z3=20, Z4=60,n1=200r/min, n4=50r/min ,且两太阳轮1、4 转向相反。试求行星架转速n H及行星轮转速n3。
2 O1 H
1
3
3
2
n 2
H
n
O
H
n
1
1
n 3 -n H
2
3
H 1
3 2
n3H = n 3-n H n2H = n 2-n H H n1H = n 1-n H
1
a) 原周转轮系
b) 原周转轮系的转化轮系
周转轮系及转化轮系中各构件的转速
构件名称 原来的转速
太阳轮1
n1
行星轮2
n2
太阳轮3
n3
行星架H
nH
转化轮系中的转速
n1H=n1-nH
n2H=n2-nH n3H=n3-n H nHH=nH-nH=0
18
2.周转轮系的传动比计算
周转轮系的传动比(3/5)
转化轮系中,齿轮1对齿轮3的传动比
i1H3
n1H n3H
n1 nH n3 nH
z2 z3 z1 z2
一般表达式为 :
iG HKnnG K H H
n4
= n1 3000 i14 120
=25r/min, 转向如图
周转轮系的传动比(1/5)
5.3 周转轮系及其传动比计算
机械原理11-本科)-轮系

ω
H 3
ω1 i1H = = 1 + 1.875= + 2.875 ωH
ω
H 1
例 2:
在图示的周转轮系中, 在图示的周转轮系中,设已知 z1=100, z2=101, z2’=100, z3 = 99. 试求传动比 iH1。
2 2′
解: 为固定轮(即 轮3为固定轮 即n3=0) 为固定轮
n1 − nH n1 − nH i = = n3 − nH 0− nH
齿轮4对传动比没有影响, 齿轮4对传动比没有影响,但能改变从动 轮的转向,称为过轮或中介轮。 轮的转向,称为过轮或中介轮。
§11—3 周转轮系传动比的计算 一、周转轮系的分类 按周转轮系所具有的自由度数目的不同分类: 按周转轮系所具有的自由度数目的不同分类: 1) 行星轮系
F = 3× 3 − 2 × 3 − 2 = 1
i AB
从 A → B 从动轮齿数的连乘积 = 从 A → B 主动轮齿数的连乘积
二、首、末轮转向的确定 1、用“+” “-”表示
ω1 ω1 1 ω2
1
2
ω2
p
vp
转向相反
2
转向相同
i 12
ω1 = = ω2
z2 − z1 z2 + z1
外啮合 内啮合
对于平面定轴轮系, 对于平面定轴轮系,设轮系中有 m对外啮合齿轮,则末轮转向为(-1) 对外啮合齿轮,则末轮转向为 对外啮合齿轮
关键是先要把其中的周转轮系部分划分出来 。 周转轮系的找法: 周转轮系的找法: 先找出行星轮,然后找出系杆, 先找出行星轮,然后找出系杆,以及与 行星轮相啮合的所有中心轮。 行星轮相啮合的所有中心轮。 每一系杆, 每一系杆,连同系杆上的行星轮和与行星 轮相啮合的中心轮就组成一个周转轮系 在将周转轮系一一找出之后, 在将周转轮系一一找出之后,剩下的便是 定轴轮系部分。 定轴轮系部分。
机械设计基础第7章 轮系

§7-3 周转轮系传动比计算 16
a,b齿轮选择原则
1. 2.
3.
4.
已知转速的齿轮 固定的齿轮(n=0) 需要求该齿轮转速的齿轮 轮系之间有关联的齿轮(复合轮系) a,b,H轴线平行(周转轮系)
17
例题 在图所示的差动轮系中,已知各轮的齿数为:z1 =30,z2 =25, z2’=20, z3=75。齿轮1的转速为210r/min(蓝箭头向上),齿轮3的转速为 54r/min(蓝箭头向下),求系杆转速 的大小和方向。 解:将系杆视为固定,画出转化轮系中各轮的转向,如图中红 线箭头所示(红线箭头不是齿轮真实转向,只表示假想的转 化轮系中的齿轮转向,二者不可混淆)。因1、3两轮红线箭 头相反,因此 应取符号“-”,根据公式得:
§7-3 周转轮系传动比计算 19
§7-4 复合轮系传动比计算
除了前面介绍的定轴轮系和周转轮系 以外,机械中还经常用到复合轮系。复合轮系常以两 种方式构成: ① 将定轴轮系与基本周转轮系组合; ② 由几个基本周转轮系经串联或并联而成。 由于整个复合轮系不可能转化成为一个 定轴轮系,所以不能只用一个公式来求解。计算复合 轮系时,首先必须将各个基本周转轮系和定轴轮系区 分开来,然后分别列出计算这些轮系的方程式,最后 联立解出所要求的传动比。 正确区分各个轮系的关键在于找出各个基本周转 轮系。找基本周转轮系的一般方法是:先找出行星轮, 即找出那些几何轴线绕另一齿轮的几何轴线转动的齿 轮;支持行星轮运动的那个构件就是行星架;几何轴 线与行星架的回转轴线相重合,且直接与行星轮相啮 合的定轴齿轮就是中心轮。这组行星轮、行星架、中 心轮构成一个基本周转轮系。
根据题意,齿轮1、3的转向相反,若假设n1为正,则应 将n3以负值带入上式,
解得nH =10r/min。因nH 为正号,可知nH 的转向和n1 相同。 在已知n1、nH或n3、nH的情况下,利用公式还可容易地算 出行星齿轮2的转速 。
a,b齿轮选择原则
1. 2.
3.
4.
已知转速的齿轮 固定的齿轮(n=0) 需要求该齿轮转速的齿轮 轮系之间有关联的齿轮(复合轮系) a,b,H轴线平行(周转轮系)
17
例题 在图所示的差动轮系中,已知各轮的齿数为:z1 =30,z2 =25, z2’=20, z3=75。齿轮1的转速为210r/min(蓝箭头向上),齿轮3的转速为 54r/min(蓝箭头向下),求系杆转速 的大小和方向。 解:将系杆视为固定,画出转化轮系中各轮的转向,如图中红 线箭头所示(红线箭头不是齿轮真实转向,只表示假想的转 化轮系中的齿轮转向,二者不可混淆)。因1、3两轮红线箭 头相反,因此 应取符号“-”,根据公式得:
§7-3 周转轮系传动比计算 19
§7-4 复合轮系传动比计算
除了前面介绍的定轴轮系和周转轮系 以外,机械中还经常用到复合轮系。复合轮系常以两 种方式构成: ① 将定轴轮系与基本周转轮系组合; ② 由几个基本周转轮系经串联或并联而成。 由于整个复合轮系不可能转化成为一个 定轴轮系,所以不能只用一个公式来求解。计算复合 轮系时,首先必须将各个基本周转轮系和定轴轮系区 分开来,然后分别列出计算这些轮系的方程式,最后 联立解出所要求的传动比。 正确区分各个轮系的关键在于找出各个基本周转 轮系。找基本周转轮系的一般方法是:先找出行星轮, 即找出那些几何轴线绕另一齿轮的几何轴线转动的齿 轮;支持行星轮运动的那个构件就是行星架;几何轴 线与行星架的回转轴线相重合,且直接与行星轮相啮 合的定轴齿轮就是中心轮。这组行星轮、行星架、中 心轮构成一个基本周转轮系。
根据题意,齿轮1、3的转向相反,若假设n1为正,则应 将n3以负值带入上式,
解得nH =10r/min。因nH 为正号,可知nH 的转向和n1 相同。 在已知n1、nH或n3、nH的情况下,利用公式还可容易地算 出行星齿轮2的转速 。
轮系及其分类
表明两配条件
如图:设k——均布的行星轮数 如图:设k——均布的行星轮数
2π k
——相邻中心轮的夹角 ——相邻中心轮的夹角
将第一个行星轮在位置Ⅰ 将第一个行星轮在位置Ⅰ装入,并 固定中心轮3 固定中心轮3,再沿逆时针将行星架 2π 转过 到达位置Ⅱ ϕ 到达位置Ⅱ。 =
H
iH1 =
1 i1H
1 = = 10000 101×99 1− 100×100
1
3
若Z1=99
iH1 = −100
周转轮系传动比正负是计算出来的,而不是判断出来的。
例2: 下图所示的轮系中,已知各轮的齿数为: 试求传动比i 试求传动比i1H 解:这是一个双排2K解:这是一个双排2K-H型行星轮系。 其转化机构的传动比为
例6: 电动卷扬机减速器 Z1=24,Z2=48,Z2'=30, Z3=90,Z3'=20,Z4=30, Z5=80,求i1H
(H,5为一整体) H
3 2 1 2' 5 4 3' H为 输 出 件
(一)1,2-2',3,H——周转轮系 3',4,5——定轴轮系 (二)
ZZ ω1 −ωH ′ 2 3 i = = (−1) Z1Z2′ ω3 −ωH
H 13
ω3′ Z5 i3′5 = =− ω5 Z3′
(四)联立 i1H = 31
n1 = 1450r / m in
nH = n1 1450 = ≈ 46.77r / m in i1H 31
(三) ω3 = ω3′ ωH = ω5
二、轮系的应用 ①实现大传动比传动
i= 所 从 轮 有 动 齿数 乘 的 积 ω1 = (−1)m ω5 所 主 轮 有 动 齿数 乘 的 积
第五章轮 系

2 n2H
2’ n1 n1
H
H 3 n3H
n3
i
H 13
=
z z n1 − nH 48 × 24 4 =− 2 3 =− =− n3 − nH z1 z 2 ' 48 × 18 3
1
n1 − nH 250 − nH 4 = =− n3 − nH − 100 − nH 3
解得:nH =
讨论:是否可以将n1代为负,n3代为正? 试算,分析结果 nH=-50 r/min
i 12
ω1 z2 = =− ω2 z1
一对内啮合圆柱齿轮传动两 轮的转向相同, 轮的转向相同,其传动比前 应加“ 号 应加“+”号
z3 ω2 i23 = =+ z2 ω3
该轮系中有3对外啮 该轮系中有 对外啮 合齿轮, 合齿轮,则其传动比 公式前应加(− 公式前应加 −1)3
i 15
昆明理工大学现代教育技术中心
1 2 3 H H H H H
(<0, 负号机构) n1H n1 − nH Z 2 Z3 Z3 H = − Z1 Z 2 = − Z i13 = H = 1 (>0, 正号机构) n3 n3 − nH 对于F=1的行星轮系,若n3=0, 有 i1H
z3 = 1− i = 1+ z1
H 13
中间轮/过轮 :Z2,只改变转向不影响传动比的大小。
定轴轮系传动比的数值等于组成该轮系的各对
啮合齿轮传动比的连乘积,也等于各对齿轮中 所有从动轮齿数的乘积与所有主动轮齿数乘积 之比。
昆明理工大学现代教育技术中心
பைடு நூலகம்
一般定轴轮系的传动比计算公式
i GJ nG m 从 G 到 J 所有从动轮齿数连乘积 = = ( − 1) nJ 从 G 到 J所有主动轮齿数连乘积
2’ n1 n1
H
H 3 n3H
n3
i
H 13
=
z z n1 − nH 48 × 24 4 =− 2 3 =− =− n3 − nH z1 z 2 ' 48 × 18 3
1
n1 − nH 250 − nH 4 = =− n3 − nH − 100 − nH 3
解得:nH =
讨论:是否可以将n1代为负,n3代为正? 试算,分析结果 nH=-50 r/min
i 12
ω1 z2 = =− ω2 z1
一对内啮合圆柱齿轮传动两 轮的转向相同, 轮的转向相同,其传动比前 应加“ 号 应加“+”号
z3 ω2 i23 = =+ z2 ω3
该轮系中有3对外啮 该轮系中有 对外啮 合齿轮, 合齿轮,则其传动比 公式前应加(− 公式前应加 −1)3
i 15
昆明理工大学现代教育技术中心
1 2 3 H H H H H
(<0, 负号机构) n1H n1 − nH Z 2 Z3 Z3 H = − Z1 Z 2 = − Z i13 = H = 1 (>0, 正号机构) n3 n3 − nH 对于F=1的行星轮系,若n3=0, 有 i1H
z3 = 1− i = 1+ z1
H 13
中间轮/过轮 :Z2,只改变转向不影响传动比的大小。
定轴轮系传动比的数值等于组成该轮系的各对
啮合齿轮传动比的连乘积,也等于各对齿轮中 所有从动轮齿数的乘积与所有主动轮齿数乘积 之比。
昆明理工大学现代教育技术中心
பைடு நூலகம்
一般定轴轮系的传动比计算公式
i GJ nG m 从 G 到 J 所有从动轮齿数连乘积 = = ( − 1) nJ 从 G 到 J所有主动轮齿数连乘积
第十章-轮系

z2 z1
17 27
n1=3000rpm nH=920rpm 得n2 = 2383.5rpm
注意:空间轮系的方向只能用箭头画,但 在公式中一定要反映出正负号来!!
例题2
i13H
n1H n3H
n1 nH n3 nH
z2z3 z1z2'
3080 2.4 20 50
若 n1=50rpm
利用公式计算时应注意:
(1)公式只适用于齿轮1、齿轮k和 系杆H三构件的轴线平行或重合的情况, 齿数比前的“+”、“”号由转化轮系按定 轴轮系方法确定。
i1H3
1 H 3 H
z3 z1
i1H2
1 2
H H
(2) ω1、ωk、ωH均为代数值,代入公式计算时要带上相应 的“+”、“”号,当规定某一构件转向为“+”时,则转向与
最后 i14 = n1/n4= i13 X i34 =-10.13X( -1.67)=16.9
也可: i1H = i15 =n1/n5 = 43.9 i54 =n5/n4 =z4/z5 = 30/78=0.385
最后 i14 = n1/n4= i15 X i54 =43.9X 0.385=16.9
例题:在图示双螺旋桨飞机的减速器中,已知
1、轮系中各轮几何轴线均互相平行
i1N
1 N
n1 nN
(1)k
所有从动轮齿数乘积 所有主动轮齿数乘积
k 为外啮合次数! 若计算结果为“+”,表明首、末 两轮的转向相同;反之,则转向相反。
规定:
外啮合:二轮转向相反,用负号“-”表示;
内啮合:二轮转向相同,用正号“+”表示。
2、轮系中所有各齿轮的几何轴线不都平行,但首、末 两轮的轴线互相平行
机械原理第五章 轮系

(1) z1 44, z2 40, z2 42, z3 42 (2) z1 100 , z2 101, z2 100 , z3 99 (3) z1 100 , z2 101, z2 100, z3 100
z2
z2
H
解:(1)
i1H3
n1 n3
nH nH
(1)2
z2 z3 z1z2
(1)3
z2 z4 z6 z1 z3 z5
30 40 120 60 30 40
2
i1H
n1 nH
1 i1H6
12 3
nH
n1 3
6.5
转/分
nH与 n1 同向
例9:图示小型起重机机构,已知 z1 53, z1 44, z2 48, z2 53, z3 58, z3 44, z4 87 ,一般工作情况下,5轴不转,动力由电机M 输入,带动滚筒N 转动;
H H
3 H (1)2 z1z2 1
0 H
z2 z3
上式表明,轮3的绝对角速度为0,但相对角速度不为0。
ω2=2ωH ω3=0
z2
z3
z1
铁锹
ωH
z3
z2 H
z1
z3
H z2 ωH
z1
例5:图示圆锥齿轮组成的轮系中,已知
z1 48, z2 48, z2 18, z3 24, n1 250 r/min , n3 100 r/min
(3) i1H 1 i1H3 1101 100 /100 100 1/100
结论:系杆转100圈时,轮1反向转1圈
iH1 1/ i1H 100
讨论:(1)行星轮系用少数几个齿轮,就可以获得很大的传动比,比定轴轮系要紧凑轻便很多,但当 传 动比很大时,效率很低。因此行星轮系常用于仪表机构,用来测量高速转动或作为精密微调机构。
机械原理第九章 轮系
1 10000
iH1 1/ i1H 10000
1H 3H
当系杆转10000转时,轮1才转1转, 二者转向相同。此例说明周转轮系可 获得很大的传动比。
周转轮系的传动比计算
例题2:z1=z2=48,z2’=18, z3=24,n1=250 r/min,
n3= 100 r/min,方向如图所示。求: nH 的大小和方向
§9.3 周转轮系的传动比计算
定轴轮系传动比计算公式
周转轮系传动比计算
?
反转法原理,将周转 轮系转化为定轴轮系
周转轮系的传动比计算
一、周转轮系传动比计算的基本思路
- H
系杆机架 周转轮系定轴轮系
周转轮系的 转化机构
可直接用定轴轮系传动比的计算公式。
周转轮系的传动比计算
将轮系按-ωH反转后,各构件的角速度的变化如下:
三环传动没有专门的输出 机构,因而具有结构简单、 紧凑的优点。
其他行星传动简介
二、摆线针轮传动
组成:1为针轮,2为摆线行星轮,H为系杆,3为输出机 构。
行星轮的齿廓曲线不是渐开线,而是外摆线;中心内齿 轮采用了针齿。
iHV
iH 2
nH n2
z2 z1 z2
z2
三、谐波传动
其他行星传动简介
组成:具有内齿的刚轮、具有外齿的柔轮和波发生器H。 通常将波发生器作为主动件,而刚轮和柔轮之一为从动件, 另一个为固定件。
广泛用于机床、计算装置、补偿调整装置中
运动分解
轮系的功用
汽车后桥减速器示意图
i143
n1 n3
n4 n4
z3 z1
1
2n4
1 2
(n1
n3 )
轮系的功用
汽车机械基础12汽车齿轮系

上一页
返回
图12-1 平面定轴轮系
返回
图12-2 空间定轴轮系
返回
图12-3 行星轮系
返回
图12-4 一对齿轮传动
返回
图12-5 圆锥齿轮传动和蜗杆传动
返回
图12-6 定轴轮系的传动比
返回
图12-7 行星轮系及其分类
返回
图12-8 行星轮系及其转化轮系
返回
表12-1 转化前后轮系中各构件的转 速
母i 表示。 并在其右下角用下标表明其对应的两轮。 例如。 i15 表 示轮1 和轮5 的角速度之比。 计算轮系传动比不仅要确定它的数值。 而且要确定首末两轮的相对转动方向。 这样才能完整表达输入轮和输出 轮之间的运动关系。 如图12-6 所示的定轴轮系中。 设锥齿轮1 为主动轮。 蜗轮5 为最 末的从动轮。 则该轮系的总传动比为i15 = ω1 / ω5 = n1 / n5。 各对齿轮的传动比分别为:
上一页 下一页 返回
12.3 行星轮系的传动比计算
在图12-8 (a) 所示的行星轮系中。 若给整个行星轮系加上一个与行 星架H 的转速nH大小相等、方向相反的公共转速- nH。 则行星架 H 静止不动。 而各构件之间的相对运动关系不发生改变。 这样原来的 行星轮系就转化为定轴轮系。 该假想定轴轮系称为原行星轮系的转化轮 系。 如图12-8 (b) 所示。 转化轮系中各构件相对于行星架H 的转速 分别用nH1、nH2、nH3 和nHH表示。 各构件转化前后的转速如表 12-1 所示。
返回
12.2 定轴轮系的传动比计算
12.2.1 一对齿轮的传动比 一对齿轮传动的传动比。 是指两轮的角速度(或转速) 之比。 如图12-
4 所示的一对圆柱齿轮传动。 传动比为
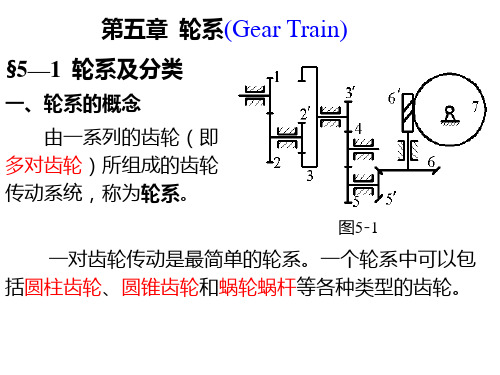
机械原理(朱理主编)第7章 轮系
二、周转轮系传动比的计算
3 H
O2 3 2 3
2 O2 H
1.分析思路: 定轴轮系
O1
H O3 4 1
O1 O3 1 4 OH
系杆H运动
1
OH
周转轮系
轮
系杆H不动 2.处理方法: 固定系杆H(假想) 转化轮系(定轴轮系)
原轮系
转化轮系
周转轮系的转化机构(转化轮系):
箭头表示在 转化轮系中的方向
二、实现相距较远的两轴 之间的传动
采用周转轮系,可以在使用
很少的齿轮并且也很紧凑的条 件下,得到很大的传动比。
三、 实现变速传动:
在主轴转速不变的条件下,利用轮系可使从动轴得到若 干种转速,从而实现变速传动。
3
右
3’
7
7’
2 1
4
5
6
z z z z z z z z
2 3 4 , , 1 2 3
7
ω6 的方向如图所示。
§7-3
一、周转轮系
周转轮系的传动比
O2 3 2 H O1 1 OH 4 H O3 1 O1 O3 1 4 OH H 3 3 2 O2
F 3 4 2 4 2 2
2 3 O2 H O1 OH 1
轮3固定 : 差动轮系:F=2 行星轮系:F=1
F 3 3 2 3 2 1
6
4 5
5
Z2 Z4 i14 = - ——— Z1 Z3
Z2 Z4 Z6 i16 = ———— Z1 Z3 Z5
i18 =
Z2 Z4 Z6 Z8 Z1 Z3 Z5 Z7
●
答案 练习
答案 练习
右旋蜗杆
例1:
已知:n1=500r/min,Z1=20,Z2=40,Z3=30,Z4=50。
机械设计基础.第五章_轮系机构
z2 zn 1 H n H z1 z n 1
各轮齿数已知,就可以确定1、n、H之间的关系; 如果其 中两个转速已知,就可以计算出第三个,进而可以计算周转轮系 的传动比。
1、i1H 是转化机构中齿轮1为主动轮、齿轮n为从动轮时的传动 n
比,其大小和方向可以根据定轴轮系的方法来判断; 2、表达式中 1、n、H的正负号问题。若基本构件的实际 转速方向相反,则 的正负号应该不同。
1 z 2 z 3 z 4 z 5 i15 5 z1 z 2' z 3' z 4
1 2 3 4 1 i15 2 3 4 5 5
大小:
i1 k
1 m 从 动 轮 齿 数 连 乘 积 ( 1) k 主动轮齿数连乘积
m: 外 啮 合 的 次 数
3 要在 先计 学算 会传 分动 析比 传大 动小 路之 线前 Ⅱ 1 2 Ⅲ
动力输出
4
传动路线 动力输入
Ⅰ
两级齿轮传动装置
例1
如图所示轮系,分析该轮系传动路线。
Ⅴ Ⅰ
z1
z7 z8
Ⅲ
z9
Ⅵ
n1 z2
Ⅱ
z5 Ⅳ z6
z3
z4
n9
解
该轮系传动路线为:
Ⅰ
n1
z1 z2
Ⅱ
z3 z4
Ⅲ
z5 z6
Ⅳ
z7 z8
z 2 z3 z5 1 z 2 z 3 z 4 z 5 i15 5 z1 z 2' z 3' z 4 z1 z 2 ' z 3'
?
转向?
平面定轴轮系(各齿轮轴线相互平行)
例 1:
《机械设计基础》第5章 轮系
解:差动轮系:1—2—3(H)
i13
H
=
n1 n3
nH nH
=
-
z2 z1
•
z3 z2
=
-
z3 z1
设轮1的转向为正(即n1=10 ) , 则轮3的转向为负(即n3= -10) 。故
n1 n3
10 nH = -90/30 =-3
10 nH
解得:nH = -5rpm(与轮1的转向相反) i1H = n1 / nH =10/-5= -2(轮1与行星架H的转向相反)
如图a:整个轮系加上 “-nH” ,周转轮
系部分
定轴轮系,但定
图a
轴轮系部分
周转轮系;
如图b:由于各个周转轮系有不同的nH, 无法加上一个公共角速度“-
nH1”或“-nH2”来将整个轮系转 化为定轴轮系。
图b
计算复合轮系传动比的正确方法是:(计算步骤) 1、首先分析轮系,正确区分各个基本轮系(即单一的定
而是绕其它齿轮的固定轴线回转;
2)再找行星架(1个) :支承行星轮的构件(注:其形 状不一定是简单的杆件,有时是箱体或齿 轮,同一行星架上可能有几个行星轮);
3)最后找太阳轮(1~2个):与行星轮啮合且几何轴线是 固定的、并与行星架的轴线重合。
则:每个行星架 + 此行星架上的行星轮 +与行星轮啮合的太阳轮 = 1个周转轮系。
2、5的转向相同)
∴
i17=
z2 z1
•
z3 z 2
•
z4 z3
•
z5 z4
•
z6 z5
•
z7 z6
上例中的轮4,其齿数多少不影响传动比的大小,只
起改变转向的作用,在轮系中的这种齿轮称为惰轮(过桥
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车机械基础第十二章 轮系
轮系的功用: 二. 轮系的功用:
3. 实现变速传动
动画
汽车机械基础第十二章 轮系
二.轮系的功用
4、获得大传动比 如渐开线少齿差行星齿轮传动:一般齿数差Z 如渐开线少齿差行星齿轮传动:一般齿数差Z1=1~ 渐开线少齿差行星减速器单级i Z2=1~4。渐开线少齿差行星减速器单级iHV可达 135,两级i 可达1000以上,结构紧凑, 1000以上 135,两级iHV可达1000以上,结构紧凑,应用广 泛。
汽车机械基础第十二章 轮系
第十二章 轮系
第一节 轮系的类型与功用 第二节 轮系的传动比计算
汽车机械基础第十二章 轮系轮系定义: 轮系定义:
在复杂的现代机械中,为了满足各种不同的需要, 在复杂的现代机械中,为了满足各种不同的需要, 常常采用一系列齿轮组成的传动系统。 常常采用一系列齿轮组成的传动系统。 轮系——由一系列相互啮合的齿轮(蜗杆、蜗轮) 由一系列相互啮合的齿轮( 轮系 由一系列相互啮合的齿轮 蜗杆、蜗轮) 组成的传动系统。 组成的传动系统。
汽车机械基础第十二章 轮系
1.平面定轴轮系传动比的计算 1.平面定轴轮系传动比的计算
结论: 结论:平面定轴轮系传动比的大小等于等 于轮系中所有从动轮齿数的连乘积与所有主 动轮齿数的连乘积之比 。 设轮1为起始主动轮, 设轮1为起始主动轮,轮K为最末从动轮,则平面 为最末从动轮, 定轴轮系的传动比的一般公式为 :
汽车机械基础第十二章 轮系
周转轮系
动画
汽车机械基础第十二章 轮系
2.周转轮系 2.周转轮系
周转轮系的组成 :
周 转 轮 系 太阳轮 行星轮 行星架或系杆
动画
一个基本周转轮系中 行星轮可有多个, 一个基本周转轮系中,行星轮可有多个,太阳轮的 基本周转轮系 数量不多于两个,行星架只能有一个。 数量不多于两个,行星架只能有一个。
n1 z 2 z 3 z 3 z6 i16 = = n6 z1 z ′ z ′ z5 2 3
汽车机械基础第十二章 轮系
减速器
汽车机械基础第十二章 轮系
减速器
同轴式双级圆柱齿轮减速器
汽车机械基础第十二章 轮系
圆锥减速器
减速器
圆锥—圆柱齿轮减速器 圆锥 圆柱齿轮减速器
蜗杆减速器
汽车机械基础第十二章 轮系
转化轮系
汽车机械基础第十二章 轮系
周转轮系传动比的计算
周转轮系及转化轮系中各构件的转速: 周转轮系及转化轮系中各构件的转速:
构件名称 原转速 转化轮系中的转速 太阳轮1 太阳轮1 行星轮2 行星轮2 太阳轮3 太阳轮3 行星架H 行星架H
n1 n2 n3 nH
n1H=n1-nH n2H=n2-nH n3H=n3-n H nHH=nH-nH=0
汽车机械基础第十二章 轮系
轮系的功用: 二、轮系的功用:
5.实现分路传动 5.实现分路传动
滚齿机轮系
汽车机械基础第十二章 轮系
二.轮系的功用
5.实现运动合成与分解 5.实现运动合成与分解 例:汽车后桥差速器
汽车机械基础第十二章 轮系
第二节 定轴轮系的传动比计算
轮系的传动比——是指轮系中输入轴(主动轮)的 是指轮系中输入轴(主动轮) 轮系的传动比 是指轮系中输入轴 角速度(或转速)与输出轴(从动轮) 角速度(或转速)与输出轴(从动轮)的角速度 或转速)之比, (或转速)之比,即 :
第十二章 轮系
汽车机械基础第十二章 轮系
第十二章 轮系
汽车机械基础第十二章 轮系
第十二章 轮系
本章的教学目标: 本章的教学目标: 了解轮系的分类和应用;定轴轮系、 1)了解轮系的分类和应用;定轴轮系、 周转轮系传动的组成和特点。 周转轮系传动的组成和特点。 掌握是轮系传动比的计算。 2)掌握是轮系传动比的计算。
汽车机械基础第十二章 轮系
2.平面定轴轮从动轮转向的确定 2.平面定轴轮从动轮转向的确定
用画箭头的方法确定平面定 轴轮系从动轮转向: 轴轮系从动轮转向: 箭头方向表示齿轮( 箭头方向表示齿轮(或构 最前点的线速度方向。 件)最前点的线速度方向。 惰轮——不影响传动比大 不影响传动比大 惰轮 小,只起改变从动轮转向作 用的齿轮。 用的齿轮。
H 1k
+
汽车机械基础第十二章 轮系
三. 混合轮系传动比的计算 方法: 方法:
先将混合轮系分解 成基本周转轮系和定 轴轮系, 轴轮系,然后分别列 出传动比计算式, 出传动比计算式,最 后联立求解。 后联立求解。
图12-14 混合轮系 汽车机械基础第十二章 轮系
小结
轮系类型。 一、轮系类型。 轮系的功用。 二、轮系的功用。 定轴轮系传动比的计算。 三、定轴轮系传动比的计算。 i=? “+-” + 是如何规定的? 是如何规定的?
汽车机械基础第十二章 轮系
第二节 周转轮系传动比的计算
在行星齿轮系中,设G、K分别为轴线与主轴线平 在行星齿轮系中, 行或重合的任意两个齿轮,则从G轮到K 行或重合的任意两个齿轮,则从G轮到K轮的传动 比可用下式求解: 比可用下式求解:
汽车机械基础第十二章 轮系
转化轮系: 转化轮系:
图12-11 周转轮系及转化轮系 周转轮系 b) 转化轮系 汽车机械基础第十二章 轮系
汽车机械基础第十二章 轮系
1.平面定轴轮系传动比的计算 1.平面定轴轮系传动比的计算
n1 z2 i12 = = − n2 z1 ′ n3 z 4 i3′4 = = ′ n4 z3
′ n2 z3 i2′3 = = ′ n3 z2 n4 z5 i45 = = − n5 z4
i12 i2 ′3 i3′ 4 i45
减速器
单级圆柱齿轮减速器
分流式双级 圆柱齿轮减速器
汽车机械基础第十二章 轮系
第二节 周转轮系传动比的计算
简单周转轮系—— 具 简单周转轮系 有一个自由度的周转轮系; 有一个自由度的周转轮系; 差动轮系——具有两个 具有两个 差动轮系 自由度的周转轮系。 自由度的周转轮系。
F=3x(N-1)F=3x(N-1)-2PL-PH 左图: 左图:F1=3X3-2X3-2=1 右图: 右图: F2=3X4-2X4-2=2
汽车机械基础第十二章 轮系
周转轮系传动比的计算: 周转轮系传动比的计算:
由于转化轮系为定轴轮系, 由于转化轮系为定轴轮系,故根据定轴轮系传动 转化轮系为定轴轮系 比计算式可得轮1 传动比为: 比计算式可得轮1、3传动比为:
该结论可推广到周转轮系的转化轮系传动比计算 的一般情况:
n1 − nH m 轮 1至 轮 k 至 至 至至 至轮 至 至至轮 至至至 至至 i = = (−1) 轮 1至 轮 k 至 至 至至 至轮 至 至 至轮 至至至 至至 nk − nH
一.轮系类型
定轴轮系——所有齿轮几何轴线的位置 1、定轴轮系 所有齿轮几何轴线的位置 都是固定的轮系,称为定轴轮系。 都是固定的轮系,称为定轴轮系。
汽车机械基础第十二章 轮系
定轴轮系: 定轴轮系:
汽车机械基础第十二章 轮系
一.轮系的类型
周转轮系——至少有一个齿轮除绕自身轴线自 2、周转轮系 至少有一个齿轮除绕自身轴线自 转外,其轴线又绕另一个轴线转动的轮系称为行 转外, 星齿轮系。 星齿轮系。 动画
汽车机械基础第十二章 轮系
3.空间定轴轮系传动比的计算 3.空间定轴轮系传动比的计算
传动比的大小仍采用推广式计算, 传动比的大小仍采用推广式计算,用画箭头的方 大小仍采用推广式计算 法确定从动轮的转向 转向: 法确定从动轮的转向: 圆锥齿轮传动:表示齿轮副转向的箭头同时指向 圆锥齿轮传动: 或同时背离节点; 或同时背离节点; 蜗杆传动:用蜗杆“ 右手法则” 蜗杆传动:用蜗杆“左、右手法则”,对右旋蜗 用右手握住蜗杆的轴线, 杆,用右手握住蜗杆的轴线,四指弯曲方向与蜗杆 转动方向一致, 转动方向一致,则与拇指的指向相反的方向就是蜗 轮在节点处圆周速度的方向。对左旋蜗杆,用左手 轮在节点处圆周速度的方向。对左旋蜗杆, 法则。 法则。
汽车机械基础第十二章 轮系
2.周转轮系 2.周转轮系
行星架与两中心轮的几何轴线( 必须重合, 行星架与两中心轮的几何轴线(O1-O3-OH)必须重合, 否则无法运动。 否则无法运动。 差动轮系:齿轮1 均绕固定轴线转动, 差动轮系:齿轮1、3均绕固定轴线转动,机构有二 个自由度,工作时需要二个原动件。 个自由度,工作时需要二个原动件。
汽车机械基础第十二章 轮系
一.轮系的类型
3.混合轮系 既含有定轴轮系又含有周转轮系, 3.混合轮系——既含有定轴轮系又含有周转轮系, 混合轮系 既含有定轴轮系又含有周转轮系 或包含有几个基本周转轮系的复杂轮系。 或包含有几个基本周转轮系的复杂轮系。
动画
汽车机械基础第十二章 轮系
轮系的图示法: 轮系的图示法:
汽车机械基础第十二章 轮系
轮系
汽车机械基础第十二章 轮系
轮系类型: 一、轮系类型:
根据轮系中各齿轮的 轴线位置关系分为: 轴线位置关系分为: 平面轮系 轮系 空间轮系 定轴轮系 轮系 周转轮系 混合轮系
根据轮系运转时齿轮 的轴线位置相对于机 架是否固定, 架是否固定,又将轮 系分: 系分:
汽车机械基础第十二章 轮系
汽车机械基础第十二章 轮系
二、轮系的功用
1、实现远距离传动
汽车机械基础第十二章 轮系
二.轮系的功用 轮系的功用
2.实现换向传动 2.实现换向传动 在主动轴转向不变的情况下, 在主动轴转向不变的情况下,利用惰轮可以改变 从动轮的转向。 从动轮的转向。例:车床走刀丝杠的三星轮换向 机构: 机构:
动画
汽车机械基础第十二章 轮系
n′ = n2 2
′ ′ n1 n 2 n 3 n 4 z 2 z3 z 4 z5 = = ′ ′ n 2 n3 n 4 n5 z1 z 2 z 3 z 4