FDTD(时域有限差分法)算法
FDTD算法概述
前向差分
后向差分
中心差分
4
利用泰勒展开式
df ( x) h 2 d 2 ( x) f ( x h) f ( x ) h 2 dx 2! dx df ( x) h 2 d 2 ( x) f ( x h) f ( x ) h 2 dx 2! dx df ( x) 2h 3 d 3 ( x) f ( x h) f ( x h) 2h 3 dx 3! dx
H x t
n 1 1 i , j ,k 2 2
Hx
n
1 1 i , j ,k Fra bibliotek 21 2
Hx t
n
1 1 i , j ,k 2 2
1 2
2 O t
E y z
E z y
n
1 1 i , j ,k 2 2
n
Ey
n 1 i , j , k 1 2
2
• 基本计算步骤
① 采用一定的网格划分方式离散化场域 ② 对场内的偏微分方程及各种边界条件进行差分离散化处理,建立差分 格式,得到差分方程组 ③ 结合选定的代数方程组的解法,编制程序,求边值问题的数值解
3
2.差分格式
• 差分基础知识
设函数f(x),对其自变量x取增量 x h ,则
df f ( x) f ( x) f ( x h) f ( x) lim x 0 dx x x h f ( x ) f ( x h) h f ( x h) f ( x h) 2h
11
• 数值稳定的条件:
t 1 1 1 (x)2 (y )2 (z )2
当空间步长相等即Δx=Δy=Δz时,
FDTD方法
有限差分法(FDM)的起源,讨论其在静电场求解中的应用.以铝电解槽物理模型为例,采用FDM对其场域进行离散,使用MATLAB和C求解了各节点的电位.由此,绘制了整个场域的等位线和电场强度矢量分布.同时,讨论了加速收敛因子对超松弛迭代算法迭代速度的影响,以及具有正弦边界条件下的电场分布.有限差分法有限差分方法(FDM)是计算机数值模拟最早采用的方法,至今仍被广泛运用。
该方法将求解域划分为差分网格,用有限个网格节点代替连续的求解域。
有限差分法以Taylor级数展开等方法,把控制方程中的导数用网格节点上的函数值的差商代替进行离散,从而建立以网格节点上的值为未知数的代数方程组。
该方法是一种直接将微分问题变为代数问题的近似数值解法,数学概念直观,表达简单,是发展较早且比较成熟的数值方法。
分类对于有限差分格式,从格式的精度来划分,有一阶格式、二阶格式和高阶格式。
从差分的空间形式来考虑,可分为中心格式和逆风格式。
考虑时间因子的影响,差分格式还可以分为显格式、隐格式、显隐交替格式等。
目前常见的差分格式,主要是上述几种形式的组合,不同的组合构成不同的差分格式。
差分方法主要适用于有结构网格,网格的步长一般根据实际地形的情况和柯朗稳定条件来决定。
构造差分的方法构造差分的方法有多种形式,目前主要采用的是泰勒级数展开方法。
其基本的差分表达式主要有三种形式:一阶向前差分、一阶向后差分、一阶中心差分和二阶中心差分等,其中前两种格式为一阶计算精度,后两种格式为二阶计算精度。
通过对时间和空间这几种不同差分格式的组合,可以组合成不同的差分计算格式2 时域有限差分法时域有限差分法是一种在时域中求解的数值计算方法,求解电磁场问题的FDTD方法是基于在时间和空间域中对Maxwell旋度方程的有限差分离散化一以具有两阶精度的中心有限差分格式来近似地代替原来微分形式的方程。
FDTD 方法模拟空间电磁性质的参数是按空间网格给出的,只需给定相应空间点的媒质参数,就可模拟复杂的电磁结构。
时域有限差分法二维

时域有限差分法二维1. 引言时域有限差分法(Finite Difference Time Domain, FDTD)是一种常用的数值计算方法,用于求解电磁场在时域中的传播和辐射问题。
本文将以二维情况为例,深入探讨时域有限差分法的原理和应用。
通过本文的介绍和解读,您将更全面地理解这一方法,并能够灵活应用于相关领域。
2. 时域有限差分法简介2.1 原理概述时域有限差分法是一种迭代求解偏微分方程的方法,通过将时域和空间离散化,将连续问题转化为离散问题。
在二维情况下,假设空间网格分辨率为Δx和Δy,时间步长为Δt。
根据电磁场的麦克斯韦方程组,可以利用中心差分公式进行离散化计算,得到求解方程组的更新方程。
2.2 空间离散化对于二维情况,空间离散化可以采用正交网格或非正交网格。
常见的正交网格包括方形格点、Yee网格等,而非正交网格则具有更灵活的形态。
根据需要和应用场景,选择合适的离散化方法对问题进行求解。
2.3 时间离散化时间离散化主要有显式和隐式两种方法。
显式方法将时间推进方程展开成前一时刻的电场和磁场与当前时刻的源项之间的关系,容易计算但对时间步长有限制;隐式方法则是通过迭代或矩阵计算求解当前时刻的电场和磁场。
3. 时域有限差分法的应用领域时域有限差分法广泛应用于电磁场传播和辐射问题的数值模拟中。
以下是几个典型的应用领域:3.1 辐射问题时域有限差分法可以模拟电磁波在空间中的辐射传播过程。
可以用于分析天线的辐射特性,设计无线通信系统的天线,或者分析电磁波在无线电频段的传播情况。
3.2 波导问题对于波导结构,时域有限差分法可以求解其模式、传输特性等问题。
波导结构广泛应用于光子学器件、微波器件等领域,时域有限差分法为建立数值模型和解析波导特性提供了一种有效的数值计算手段。
3.3 散射问题时域有限差分法在散射问题的数值模拟中也有重要应用。
通过模拟散射体与电磁波的相互作用过程,可以研究和分析散射体的散射特性,例如雷达散射截面的计算、微波散射问题等。
时域有限差分法FDTD算法的基本原理及仿真

时域有限差分法(FDTD 算法)时域有限差分法是1966年K.S.Yee 发表在AP 上的一篇论文建立起来的,后被称为Yee 网格空间离散方式。
这种方法通过将Maxwell 旋度方程转化为有限差分式而直接在时域求解, 通过建立时间离散的递进序列, 在相互交织的网格空间中交替计算电场和磁场。
FDTD 算法的基本思想是把带时间变量的Maxwell 旋度方程转化为差分形式,模拟出电子脉冲和理想导体作用的时域响应。
需要考虑的三点是差分格式、解的稳定性、吸收边界条件。
有限差分通常采用的步骤是:采用一定的网格划分方式离散化场域;对场内的偏微分方程及各种边界条件进行差分离散化处理,建立差分格式,得到差分方程组;结合选定的代数方程组的解法,编制程序,求边值问题的数值解。
1.FDTD 的基本原理FDTD 方法由Maxwell 旋度方程的微分形式出发,利用二阶精度的中心差分近似,直接将微分运算转换为差分运算,这样达到了在一定体积内和一段时间上对连续电磁场数据的抽样压缩。
Maxwell 方程的旋度方程组为:E E H σε+∂∂=⨯∇t H HE m tσμ-∂∂-=⨯∇ (1) 在直角坐标系中,(1)式可化为如下六个标量方程:⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫+∂∂=∂∂-∂∂+∂∂=∂∂-∂∂+∂∂=∂∂-∂∂z z x y y y z x x x yz E t E y H x H E t E x H z H E t E z H y H σεσεσε,⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫-∂∂-=∂∂-∂∂-∂∂-=∂∂-∂∂-∂∂-=∂∂-∂∂z m zx y y m y z x x m x y z H t H y E x E H t H x E z E H t H z E y E σμσμσμ (2)上面的六个偏微分方程是FDTD 算法的基础。
Yee 首先在空间上建立矩形差分网格,在时刻t n ∆时刻,F(x,y,z)可以写成),,(),,,(),,,(k j i F t n z k y j x i F t z y x F n =∆∆∆∆= (3)用中心差分取二阶精度: 对空间离散:()[]2),,21(),,21(),,,(x O xk j i F k j i F x t z y x F n n xi x ∆+∆--+≈∂∂∆= ()[]2),21,(),21,(),,,(y O yk j i F k j i F y t z y x F n n yj y ∆+∆--+≈∂∂∆= ()[]2)21,,()21,,(),,,(z O zk j i F k j i F z t z y x F n n zk z ∆+∆--+≈∂∂∆=对时间离散:()[]22121),,(),,(),,,(t O tk j i F k j i F t t z y x F n n tn t ∆+∆-≈∂∂-+∆= (4) Yee 把空间任一网格上的E 和H 的六个分量,如下图放置:oyxzEyHzExEzHxEyEyEzEx HyEzEx图1 Yee 氏网格及其电磁场分量分布在FDTD 中,空间上连续分布的电磁场物理量离散的空间排布如图所示。
FDTD介绍

FDTD 研究历史和现状
原则上可以求解任意形式的电磁场和电磁波的技术和工程问题, 并且对计算机内存容量要求较低、计算速度较快、尤其适用于并
行算法。现在FDTD法己被广泛应用于天线的分析与设计、目标电
磁散射、电磁兼容、微波电路和光路时域分析、生物电磁剂量学、 瞬态电磁场研究等多个领域。经过了近四十年的发展,FDTD法在 计算方法和应用上取得了大量成果。近几年来,讨论FDTD法的深 入发展和实际应用的文章几乎按指数增长。
的网格空间步长,用Δt表示时间步长。设 f (i,j,k)代表电场或磁
场的,某一分量在时间和空间域中的离散表达式为 f (i,j,k)= f (i x ,j y ,k z )= (i,j,k)
差分格式
Yee网格如图2.2所示,主要表示的是电场和磁场在空间各节 点的排布。由图可以看出每个电场的分量周围有四个磁场分量, 相应的每个磁场分量周围也有四个电场分量。这种空间的设置 方式能够实现空间坐标的差分计算,并且考虑到电磁场在空间
高的计算精度且无论以何种角度入射均无反射。
FDTD 方法介绍
FDTD具有以下基本要素:差分格式、数值特性和吸收边界 条件。其计算过程如下:
差分格式
对三维FDTD计算,如,电场分量Ez在t=n+1/2时刻的差分 格式为:
式中,i, j, k 分别为x,y,z,方向的网格编号。
差分格式
首先,在直角坐标系中将问题空间沿三个坐标轴方向分成 多个网格单元,其中 x, y , z 分别表示在x、y、z坐标方向
好多种吸收边条件都已经被提出来了。一般吸收边界应满足以下
条件:便于执行;计算精度够满足大多数的工程需求;通用性强; 数值稳定。
吸边界条件
目前构造吸收边界条件主要有两种思路:一种是从电磁波方程出发构造 透射边界条件,最常用的是 Mur 吸收边界和廖氏吸收边界;另一种是在边 界上吸收材料建立的吸收边界,例如完全匹配层(PML),电磁波在无反射地 进入吸收材料后,一般会被哀减掉的。其中 Mur 吸收边界具有构造简单、
FDTD(时域有限差分法)算法的Matlab源程序

rect=get(gcf,'Position'); rect(1:2)=[0 0];
M=moviein(nmax/2,gcf,rect);
%*********************************************************************** % BEGIN TIME-STEPPING LOOP %***********************************************************************
%
%***********************************************************************
clear
%*********************************************************************** % Fundamental constants
% Gaussian pulse given by
matlab模拟的电磁学时域有限差分法 pdf
matlab模拟的电磁学时域有限差分法 pdf电磁学时域有限差分法(FDTD)是一种基于数值模拟的电磁场计算方法,它使用有限差分来近似微分方程。
该方法广泛用于电磁学、电波传播、微波技术、光学等领域,以求解电磁场分布和场的辐射、散射等问题。
而在这个领域中,MATLAB是非常流行的工具之一。
本文将围绕“MATLAB模拟的电磁学时域有限差分法”这一主题,从以下几个方面进行阐述:1.时域有限差分法的基础概念在FDTD方法中,将时域中的Maxwell方程组转化为差分形式,使得可以在计算机上进行数值解法。
通过在空间和时间上的离散,可以得到电磁场在时域内的各种分布,进而求得特定情况下的电磁场变化。
2.MATLAB中的FDTD仿真在MATLAB中,我们可以使用PDE工具箱中的电磁学模块来实现FDTD仿真。
通过选择适当的几何形状和边界条件,可以利用该工具箱演示电磁场的传输、反射、折射、透射等现象。
同时,MATLAB中还提供了不同的场分量计算和可视化工具,以便用户可以更好地理解电磁场分布。
3.MATLAB代码实现以下是一些MATLAB代码示例,展示了FDTD模拟的基础实现方法。
代码中的示例模拟了平面波在一个矩形和圆形障碍物上的传播情况。
% 1. Square obstaclegridSize = 200; % Grid sizemaxTime = 600; % Maximum time (in steps)imp0 = 377.0; % Impedance of free spacecourantNumber = 0.5; % Courant numbercdtds = ones(gridSize,gridSize); % Courant number in space% (not variable in this example)Ez = zeros(gridSize, gridSize); % Define EzHy = zeros(gridSize, gridSize); % Define Hy% Simulation loopfor n = 1:maxTime% Update magnetic fieldHy(:,1:end-1) = Hy(:,1:end-1) + ...(Ez(:,2:end) - Ez(:,1:end-1)) .*cdtds(:,1:end-1) / imp0;% Update electric fieldEz(2:end-1,2:end-1) = Ez(2:end-1,2:end-1) + ...(Hy(2:end-1,2:end-1) - Hy(1:end-2,2:end-1)) .* cdtds(2:end-1,2:end-1) .* imp0;end% 2. Circular obstacleradius = 50;xAxis = [-100:99];[X,Y] = meshgrid(xAxis);obstacle = sqrt((X-50).^2 + (Y).^2) < radius;gridSize = length(xAxis); % Grid sizemaxTime = 500; % Maximum time (in steps)imp0 = 377.0; % Impedance of free space courantNumber = 0.5; % Courant numbercdtds = ones(gridSize,gridSize); % Courant number in space% (not variable in this example)Ez = zeros(gridSize, gridSize); % Define EzHy = zeros(gridSize, gridSize); % Define Hy% Simulation loopfor n = 1:maxTime% Update magnetic fieldHy(:,1:end-1) = Hy(:,1:end-1) + ...(Ez(:,2:end) - Ez(:,1:end-1)) .*cdtds(:,1:end-1) / imp0;% Update electric field, with obstacleEz(2:end-1,2:end-1) = Ez(2:end-1,2:end-1) + ...(Hy(2:end-1,2:end-1) - Hy(1:end-2,2:end-1)) .* cdtds(2:end-1,2:end-1) .* imp0;Ez(obstacle) = 0;end以上代码仅供参考,不同条件下的模拟需要适当修改,以便获得特定的模拟结果。
FDTD时域有限差分法

对时间离散:
(2)
FDTD基本原理(续)
9
为了满足(1)式空间精度的要求,并满足(2)式,Yee 把空间任一网格上的E和H的六个分量,如下图放置:
Yee把E 和H 在时间长相差半个步长计算(为了满足精度的要求)。
FDTD基本原理(续)
10
根据这一原则可以写出六个差分方程:
每个网格点上的各场分量的新值依赖于该点在前一时间步长时刻 的值,即该点周围的邻近点上另一场量在早半个时间步长时的值。 因此任一时刻可一次算出一个点,并行算法可计算出多个点。通 过这些运算可以交替算出电场磁场在各个时间步的值。
C:为光速,自由空间中: c
数值色散
14
• 产生原因
–FDTD网格中,会导致数字波模在网格中发生改变,这种改 变是由于计算网格本身引起的,而非物理因素,所以必须 考虑
• 适当选取时间步长,空间步长,传播方向,可以得到 理想情况
–3-D方形网格:取波沿对角线传播 (数值稳定的极限状态),可得理想色散关系。 –2-D方形网格:也是沿对角线传播, (也是数值稳定的极限状态) –1-D网格 (数值稳定的极限状态)
参考文献
21
• 电磁波时域有限差分方法(第二版),葛德彪, 闫玉波,西安电子科技大学出版社 • 工程电磁场数值计算,倪光正
22
练习要求:
FDTD算法
Stage 1
Stage 2
Stage 3
Stage 4
FDTD基本原理
Maxwell方程组
part 2
Maxwell旋度方程可以推出此六个耦合方程
FDTD基本原理
F n (i, j,k)= F(iDx,iDy,iDz)
part 2
Yee首先在空间上建立矩形差分网格,在时刻n△t时刻,F(x,y,z)可以写成:
用中心差分取二阶精度: 对空间离散: 对时间离散:
(1) (2)
FDTD基本原理
part 2
为了满足(1)式空间精度的要求,并满足(2)式,Yee把空间任 一网格上的E和H的六个分量,如下图放置:
Yee把E 和H 在时间长相差半个步长计算(为了满足精度的要求)。
FDTD基本原理
根据这一原则可以写出六个差分方程:
由上可知:中心差分截断的误差最小,精度最高,大致和h的二 次方成正比!
有限差分通常采用的步骤
•采用一定 的网格划分 方式离散化 场域 •对场内的偏 微分方程及各 种边界条件进 行差分离散化 处理,建立差 分格式,得到 差分方程组 •结合选定的 代数方程组的 解法,编制程 序,求边值问 题的数值解
part 2
part 1
号称目前计算 电磁学界最受 关注,最时髦 的算法,但还 在发展完善之 中,国外已有 多种基于FDTD 算法的电磁场 计算的软件。
part 1
差分格式
解的稳定性
吸收边界条件
差分
差分计算基本原理
设函数f(x), 独立变量x有很小的增量 x h ,则:
part 2
有Taylor公式可得:
2c
计算电磁学之FDTD算法的MATLAB语言实现
South China Normal University课程设计实验报告课程名称:计算电磁学指导老师:专业班级: 2014级电路与系统姓名:学号:FDTD算法的MATLAB语言实现摘要:时域有限差分(FDTD)算法是K.S.Yee于1966年提出的直接对麦克斯韦方程作差分处理,用来解决电磁脉冲在电磁介质中传播和反射问题的算法。
其基本思想是:FDTD计算域空间节点采用Yee元胞的方法,同时电场和磁场节点空间与时间上都采用交错抽样;把整个计算域划分成包括散射体的总场区以及只有反射波的散射场区,这两个区域是以连接边界相连接,最外边是采用特殊的吸收边界,同时在这两个边界之间有个输出边界,用于近、远场转换;在连接边界上采用连接边界条件加入入射波,从而使得入射波限制在总场区域;在吸收边界上采用吸收边界条件,尽量消除反射波在吸收边界上的非物理性反射波。
本文主要结合FDTD算法边界条件特点,在特定的参数设置下,用MATLAB语言进行编程,在二维自由空间TEz网格中,实现脉冲平面波。
关键词:FDTD;MATLAB;算法1 绪论1.1 课程设计背景与意义20世纪60年代以来,随着计算机技术的发展,一些电磁场的数值计算方法逐步发展起来,并得到广泛应用,其中主要有:属于频域技术的有限元法(FEM)、矩量法(MM)和单矩法等;属于时域技术方面的时域有限差分法(FDTD)、传输线矩阵法(TLM)和时域积分方程法等。
其中FDTD是一种已经获得广泛应用并且有很大发展前景的时域数值计算方法。
时域有限差分(FDTD)方法于1966年由K.S.Y ee提出并迅速发展,且获得广泛应用。
K.S.Y ee用后来被称作Y ee氏网格的空间离散方式,把含时间变量的Maxwell旋度方程转化为差分方程,并成功地模拟了电磁脉冲与理想导体作用的时域响应。
但是由于当时理论的不成熟和计算机软硬件条件的限制,该方法并未得到相应的发展。
20世纪80年代中期以后,随着上述两个条件限制的逐步解除,FDTD便凭借其特有的优势得以迅速发展。
时域有限差分法(FDTD算法)的基本原理及仿真
时域有限差分法(FDTD算法)的基本原理及仿真时域有限差分法(FDTD 算法)时域有限差分法是1966年K.S.Yee 发表在AP 上的一篇论文建立起来的,后被称为Yee 网格空间离散方式。
这种方法通过将Maxwell 旋度方程转化为有限差分式而直接在时域求解, 通过建立时间离散的递进序列, 在相互交织的网格空间中交替计算电场和磁场。
FDTD 算法的基本思想是把带时间变量的Maxwell 旋度方程转化为差分形式,模拟出电子脉冲和理想导体作用的时域响应。
需要考虑的三点是差分格式、解的稳定性、吸收边界条件。
有限差分通常采用的步骤是:采用一定的网格划分方式离散化场域;对场内的偏微分方程及各种边界条件进行差分离散化处理,建立差分格式,得到差分方程组;结合选定的代数方程组的解法,编制程序,求边值问题的数值解。
1.FDTD 的基本原理FDTD 方法由Maxwell 旋度方程的微分形式出发,利用二阶精度的中心差分近似,直接将微分运算转换为差分运算,这样达到了在一定体积内和一段时间上对连续电磁场数据的抽样压缩。
Maxwell 方程的旋度方程组为:E E H σε+∂∂=⨯∇t H HE m tσμ-∂∂-=⨯∇ (1) 在直角坐标系中,(1)式可化为如下六个标量方程:⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫+∂∂=∂∂-∂∂+∂∂=∂∂-∂∂+∂∂=∂∂-∂∂z z x y y y z x x x yz E t E y H x H E t E x H z H E t E z H y H σεσεσε,⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫-∂∂-=∂∂-∂∂-∂∂-=∂∂-∂∂-∂∂-=∂∂-∂∂z m zx y y m y z x x m x y z H t H y E x E H t H x E z E H t H z E y E σμσμσμ (2)上面的六个偏微分方程是FDTD 算法的基础。
Yee 首先在空间上建立矩形差分网格,在时刻t n ∆时刻,F(x,y,z)可以写成),,(),,,(),,,(k j i F t n z k y j x i F t z y x F n =∆∆∆∆= (3)用中心差分取二阶精度: 对空间离散:()[]2),,21(),,21(),,,(x O xk j i F k j i F x t z y x F n n xi x ∆+∆--+≈∂∂∆= ()[]2),21,(),21,(),,,(y O yk j i F k j i F y t z y x F n n yj y ∆+∆--+≈∂∂∆= ()[]2)21,,()21,,(),,,(z O zk j i F k j i F z t z y x F n n zk z ∆+∆--+≈∂∂∆=对时间离散:()[]22121),,(),,(),,,(t O tk j i F k j i F t t z y x F n n tn t ∆+∆-≈∂∂-+∆= (4) Yee 把空间任一网格上的E 和H 的六个分量,如下图放置:oyxzEyHzExEzHxEyEyEzEx HyEzEx图1 Yee 氏网格及其电磁场分量分布在FDTD 中,空间上连续分布的电磁场物理量离散的空间排布如图所示。
FDTD
2.1 FDTD 演算法FDTD(Finite-Difference Time-domain) 时域有限差分法是对电磁波进行仿真和模拟,FDTD 方法在 1966 年首次被提出,之后便得到迅速发展和广泛应用,现已在诸多领域取得研究成果和应用价值。
该方法使用麦克斯韦方程对电磁场进行计算模拟的数值分析方法,由麦克斯韦方程组可推导出: E r r H r t E )()()(1εσε-⨯∇≡∂∂ (2.1) m J E tB -⨯-∇=∂∂ (2.2) )(),(),(r r rμσε分别是介质的介电系数,电导率,磁导系数,都为位置的函数。
将公式(2.1)、(2.2)在直角坐标系下展开得: z m z x y y m y z x x m x y z H tH y E x E H tH x E z E H tH z E y E σμσμσμ-∂∂-=∂∂-∂∂-∂∂-=∂∂-∂∂-∂∂-=∂∂-∂∂ (2.3) z z x y y y z x x x y z E tE y H x H E tE x H z H E tE z H y H σεσεσε+∂∂=∂∂-∂∂+∂∂=∂∂-∂∂+∂∂=∂∂-∂∂ (2.4) 在 FDTD 离散中电场和磁场各节点的空间排布如图2.1所示,这就是著名的Yee 元胞。
图2.1 Yee 元胞示意图由图示可以看到,每一个磁场分量都由四个电场分量环绕;同样,每一个电场分量由四个磁场分量环绕。
此外,电场和磁场在时间顺序上交替抽样,抽样时间间隔彼此相差半个时间步,使用麦克斯韦旋度方程离散,使之构成显式差分方程,从而可以在时间上进行迭代求解。
因此,由给定相应的电磁场问题的初始值和边界条件,FDTD 方法就可以逐步推广的求解三维空间电磁场。
2.2 差分表达式若设观察点(x,y,z)为x E 的节点,以及时刻t n t ∆+=)1(,于是,(2-3)式中第一式的离散为:111(,,)()(,,)22n n x x E i j k CA m E i j k ++=∙+1/21/21/21/2(1/2,1/2,)(1/2,1/2,)()(1/2,,1/2)(1/2,,1/2)n n z z n n y y H i j k H i j k CB m y H i j k H i j k z ++++⎡++-+-+∙-⎢∆⎣⎤++-+-⎥∆⎥⎦ (2.5)式中)(2)(1)(2)(1)(m t m m tm m CA εσεσ∆+∆-= (2.6))(2)(1)()(m t m m tm CB εσε∆+∆= (2.7) 上式m=(i+1/2,j,k)。
时域有限差分法fdtd算法
时域有限差分法(Finite-Difference Time-Domain,FDTD)是一种用于对计算电动力学建模的数值分析技术,为相关的微分方程组寻找近似解。
时域有限差分法是由K.S.Yee在1966年发表的一篇论文建立起来的,后被称为Yee网格空间离散法。
本质原理是将随时间变化的Maxwell旋度方程更改为离散差分形式,将连续的空间分成有限的网格进行计算。
网格数量越多,计算结果更加精准,但是计算量也呈指数倍数增长,计算所需时间越长。
计算过程主要是在给定的时间点求解空间体积中的电场矢量分量,然后在下一个时刻计算相同空间体积中的磁场矢量分量,并在此结果上进行下一次的循环运算。
在空间和时域上分别不断进行循环计算,最终得到比较精准的瞬态或稳态电磁场结果。
电磁波时域有限差分方法(FDTD)
������ ∆������ ≤ 12
������为无色散介质中, ������ = 2������/������。对于非单 色波的时域脉冲信号,应以信号款到中 所对应的上限频率的波长������������������������来代替
考虑一维波动方程的一般形式:
������2������ 1 ������2������ ������������2 − ������2 ������������2 = 0
有限差分的二阶导数近似:
将(11)带入(12)得:
������2������ ������ ������ + ∆������ − 2������ ������ + ������(������ − ∆������)
������������2 ≈
(∆������)2
(1-12)
������2������ ������������2
(1-25)
为了减小上式所对应的数值色散,除了选 择空间离散∆������外,对于时间离散有同样 的选择,即:
差分近似关系:
������∆������ ������ 2 ≤ 12 或
������ ∆������ ≤ 12
������������������2(������������2∆������) (∆2������)2
������ ������∆������ ≤
3
(2) 二维取∆������ = ∆������ = ������时:
������ ������∆������ ≤
2
(1-15) (1-16) (1-17) (1-18)
(3) 一维时:
������∆������ ≤ ∆������
(1-19)
时域有限差分法
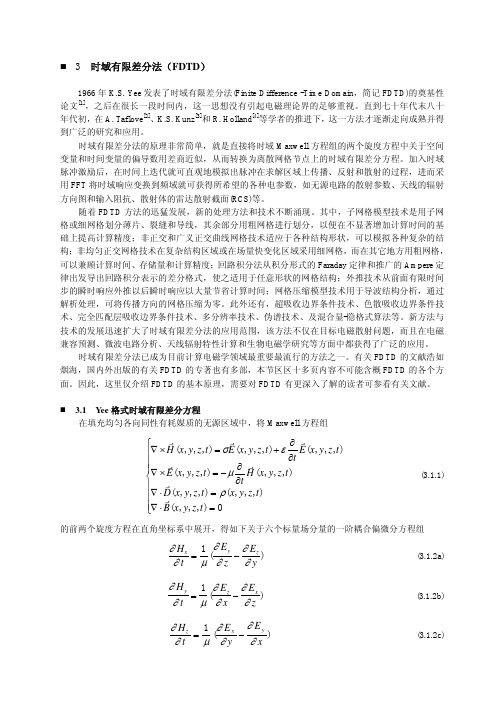
3 时域有限差分法(FDTD )1966年K.S. Yee 发表了时域有限差分法(Finite Difference -Time Domain ,简记FDTD)的奠基性论文[1],之后在很长一段时间内,这一思想没有引起电磁理论界的足够重视。
直到七十年代末八十年代初,在A. Taflove [2]、K.S. Kunz [3]和R. Holland [4]等学者的推进下,这一方法才逐渐走向成熟并得到广泛的研究和应用。
时域有限差分法的原理非常简单,就是直接将时域Maxwell 方程组的两个旋度方程中关于空间变量和时间变量的偏导数用差商近似,从而转换为离散网格节点上的时域有限差分方程。
加入时域脉冲激励后,在时间上迭代就可直观地模拟出脉冲在求解区域上传播、反射和散射的过程,进而采用FFT 将时域响应变换到频域就可获得所希望的各种电参数,如无源电路的散射参数、天线的辐射方向图和输入阻抗、散射体的雷达散射截面(RCS)等。
随着FDTD 方法的迅猛发展,新的处理方法和技术不断涌现。
其中,子网格模型技术是用子网格或细网格划分薄片、裂缝和导线,其余部分用粗网格进行划分,以便在不显著增加计算时间的基础上提高计算精度;非正交和广义正交曲线网格技术适应于各种结构形状,可以模拟各种复杂的结构;非均匀正交网格技术在复杂结构区域或在场量快变化区域采用细网格,而在其它地方用粗网格,可以兼顾计算时间、存储量和计算精度;回路积分法从积分形式的Faraday 定律和推广的Ampere 定律出发导出回路积分表示的差分格式,使之适用于任意形状的网格结构;外推技术从前面有限时间步的瞬时响应外推以后瞬时响应以大量节省计算时间;网格压缩模型技术用于导波结构分析,通过解析处理,可将传播方向的网格压缩为零。
此外还有,超吸收边界条件技术、色散吸收边界条件技术、完全匹配层吸收边界条件技术、多分辨率技术、伪谱技术、及混合显-隐格式算法等。
新方法与技术的发展迅速扩大了时域有限差分法的应用范围,该方法不仅在目标电磁散射问题,而且在电磁兼容预测、微波电路分析、天线辐射特性计算和生物电磁学研究等方面中都获得了广泛的应用。
时域有限差分法的基本原理及仿真
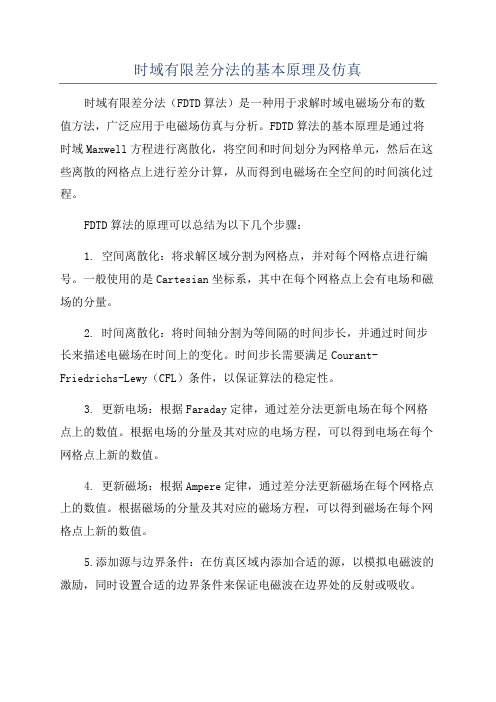
时域有限差分法的基本原理及仿真时域有限差分法(FDTD算法)是一种用于求解时域电磁场分布的数值方法,广泛应用于电磁场仿真与分析。
FDTD算法的基本原理是通过将时域Maxwell方程进行离散化,将空间和时间划分为网格单元,然后在这些离散的网格点上进行差分计算,从而得到电磁场在全空间的时间演化过程。
FDTD算法的原理可以总结为以下几个步骤:1. 空间离散化:将求解区域分割为网格点,并对每个网格点进行编号。
一般使用的是Cartesian坐标系,其中在每个网格点上会有电场和磁场的分量。
2. 时间离散化:将时间轴分割为等间隔的时间步长,并通过时间步长来描述电磁场在时间上的变化。
时间步长需要满足Courant-Friedrichs-Lewy(CFL)条件,以保证算法的稳定性。
3. 更新电场:根据Faraday定律,通过差分法更新电场在每个网格点上的数值。
根据电场的分量及其对应的电场方程,可以得到电场在每个网格点上新的数值。
4. 更新磁场:根据Ampere定律,通过差分法更新磁场在每个网格点上的数值。
根据磁场的分量及其对应的磁场方程,可以得到磁场在每个网格点上新的数值。
5.添加源与边界条件:在仿真区域内添加合适的源,以模拟电磁波的激励,同时设置合适的边界条件来保证电磁波在边界处的反射或吸收。
6.迭代求解:通过反复迭代执行步骤3和步骤4,以实现电磁场在全空间的时间演化过程。
每次迭代,电磁场都会根据已知的电磁场状态进行更新,直到达到设定终止条件。
FDTD算法的仿真过程可以描述如下:1.初始化电场和磁场:根据初始条件,设置仿真区域内电场和磁场的初值。
2.迭代求解电场和磁场:在每个时间步长内,按照步骤3和步骤4的方法更新电场和磁场的数值。
3.添加源与边界条件:在每个时间步长内,根据场源和边界条件的设置,更新仿真区域内的电磁场状态。
4.重复执行步骤2和步骤3,直到达到设定的仿真时间或满足终止条件。
FDTD算法具有广泛的应用领域,在电磁场仿真、天线设计、光学器件设计以及雷达散射等领域都有重要的应用。
时域有限差分方法

时域有限差分方法时域有限差分方法(Finite Difference Method in Time Domain,简称FDTD)是一种常用的求解偏微分方程的数值方法,适用于时间和空间均匀离散的情况。
FDTD方法通过将偏微分方程转化为差分方程,将时间和空间离散化为网格点,利用差分算子对网格点进行逼近,从而得到离散形式的方程,最终通过迭代求解差分方程从而得到数值解。
在FDTD方法中,时间和空间的离散化是方法的关键。
对于时间,通常将其分割为若干个时间步长,假设每个时间步长为Δt。
对于空间,通常将其分割为若干个网格点,假设每个网格点之间的距离为Δx。
在这里,需要注意时间步长和网格点之间的距离需要满足一定的稳定性条件,以保证数值解的稳定性。
常见的稳定性条件是CFL(Courant-Friedrich-Levy)条件,即Δt/Δx小于等于某一常数。
在时间和空间离散化后,对偏微分方程中的导数部分进行差分逼近。
例如,对于一维波动方程∂²u/∂t²= c²∂²u/∂x²,其中u表示波函数,c表示波速。
可以通过近似表示为差分方程:u(i,n+1) = 2(1 - r²)u(i,n) - u(i,n-1) + r²(u(i+1,n) + u(i-1,n))其中n表示时间步数,i表示空间网格点,u(i,n)表示波函数在网格点(i,n)处的值,r = cΔt/Δx表示稳定性条件,常称为Courant系数。
这里的差分方程即为FDTD 方法的核心方程之一。
通过迭代使用这个差分方程,可以求解出波函数在任意时间和空间位置的数值解。
FDTD方法在电磁场、声学、地震学等领域有广泛的应用。
例如,在电磁场模拟中,可以利用FDTD方法求解关于电场和磁场的Maxwell方程组,通过数值模拟电磁波在空间中的传播、反射、折射等现象。
在声学领域,FDTD方法可以用于模拟声波在空间中的传播、散射、吸收等现象,对于模拟声学器件的性能具有重要意义。
基于FDTD算法的电磁波数值模拟研究
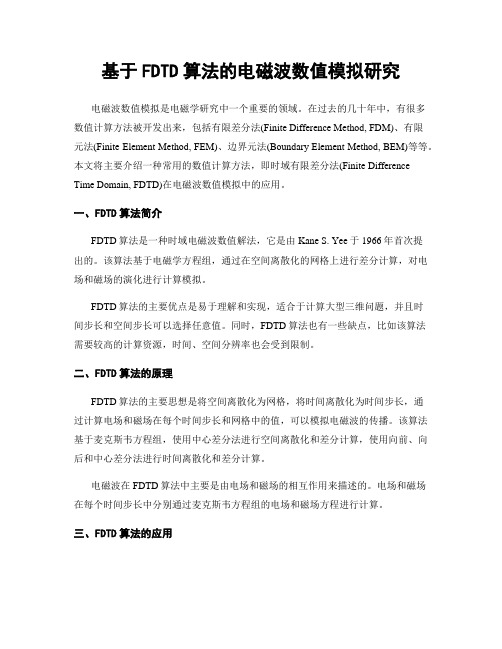
基于FDTD算法的电磁波数值模拟研究电磁波数值模拟是电磁学研究中一个重要的领域。
在过去的几十年中,有很多数值计算方法被开发出来,包括有限差分法(Finite Difference Method, FDM)、有限元法(Finite Element Method, FEM)、边界元法(Boundary Element Method, BEM)等等。
本文将主要介绍一种常用的数值计算方法,即时域有限差分法(Finite Difference Time Domain, FDTD)在电磁波数值模拟中的应用。
一、FDTD算法简介FDTD算法是一种时域电磁波数值解法,它是由Kane S. Yee于1966年首次提出的。
该算法基于电磁学方程组,通过在空间离散化的网格上进行差分计算,对电场和磁场的演化进行计算模拟。
FDTD算法的主要优点是易于理解和实现,适合于计算大型三维问题,并且时间步长和空间步长可以选择任意值。
同时,FDTD算法也有一些缺点,比如该算法需要较高的计算资源,时间、空间分辨率也会受到限制。
二、FDTD算法的原理FDTD算法的主要思想是将空间离散化为网格,将时间离散化为时间步长,通过计算电场和磁场在每个时间步长和网格中的值,可以模拟电磁波的传播。
该算法基于麦克斯韦方程组,使用中心差分法进行空间离散化和差分计算,使用向前、向后和中心差分法进行时间离散化和差分计算。
电磁波在FDTD算法中主要是由电场和磁场的相互作用来描述的。
电场和磁场在每个时间步长中分别通过麦克斯韦方程组的电场和磁场方程进行计算。
三、FDTD算法的应用FDTD算法在电磁波数值模拟中应用广泛,可以用来研究各种电磁波现象,如反射、折射、透射、衍射、散射等等。
下面将分别介绍FDTD算法在这些现象中的应用。
1.反射反射是指电磁波遇到不同介质时的反射现象。
FDTD算法可以用来模拟电磁波在界面上的反射现象。
在模拟过程中,需要将界面分为两个部分,分别用两种不同的介质表示。
FDTD算法范文

FDTD算法范文FDTD(Finite-Difference Time-Domain,有限差分时域)算法是一种用于求解Maxwell方程组的数值方法。
它是一种非常广泛应用于电磁场计算和仿真的方法,可以用于模拟各种电磁波现象,比如光学传输、天线辐射、微波器件等。
FDTD算法的思想简单直观,易于实现,并且具有良好的数值稳定性和精度。
FDTD算法的基本原理是将Maxwell方程组中的时域和空间域分离处理,通过将时域和空间域的导数项用有限差分近似来离散化方程,然后通过时间推进和空间更新的迭代过程,计算出电磁场在空间和时间上的分布。
其中,时域的更新步骤使用了中心差分格式,而空间的更新则使用了一阶差分格式。
在FDTD算法中,电磁场的每一时刻t的分布通过更新公式计算得到。
首先,根据电场和磁场的边界条件,在计算区域的边界上设置适当的边界条件。
然后,通过Maxwell方程组的时域更新公式,分别计算电场和磁场在每个空间位置的时域分量。
接下来,通过Maxwell方程组的空间更新公式,计算出电场和磁场在每个空间位置的空间分量。
通过这样的时间推进和空间更新的迭代过程,可以得到电磁场在整个计算区域的分布情况。
FDTD算法的主要特点是能够准确地模拟电磁波的传播和反射现象,并且适用于各种复杂的边界条件和介质情况。
它可以处理二维和三维的情况,并且具有高效的计算速度和较低的内存消耗。
此外,FDTD算法还可以模拟非线性和吸收介质的情况,以及微小尺寸结构和纳米器件的特殊情况。
然而,FDTD算法也有一些限制和局限性。
首先,FDTD算法的精度和稳定性受到网格尺寸和时间步长的限制,需要根据波长和介质的特性来选择适当的网格尺寸和时间步长。
同时,FDTD算法在处理大尺寸结构和长时间传播情况时会消耗较多的计算资源和时间。
此外,FDTD算法也无法处理高频电磁场和局部敏感性问题,这需要使用其他算法或技术进行改进。
总之,FDTD算法是一种强大而灵活的数值方法,广泛应用于电磁场计算和仿真领域。
fdtd圆极化转换
fdtd圆极化转换
FDTD(有限差分时域)方法是一种求解电磁波传播和相互作用过程的数值计算方法。
圆极化转换是一种将线性极化的入射波转换为圆极化的出射波的技术。
在FDTD模拟中,圆极化转换可以通过使用合适的周期和相位差来实现。
具体步骤如下:
1. 定义模拟区域:确定模拟区域的大小和边界条件。
2. 设置网格和时间步长:根据问题的特性,选择合适的空间离散网格和时间步长。
3. 定义入射波:初始时刻,在入射面上定义一个线极化的入射波。
4. 应用场更新算法:使用FDTD算法更新电场和磁场分量。
5. 添加圆极化转换:根据所需的相位差和周期,在适当的位置添加一个圆极化转换装置。
这个装置可以是一系列L和R型元件或其他合适的元件。
6. 模拟结果:运行模拟,得到圆极化转换后的电磁场分布。
通过以上步骤,可以实现将线极化的入射波转换为圆极化的出射波。
这种技术在天线设计、遥感和通信系统等领域有广泛应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
% Program author: Susan C. Hagness% Department of Electrical and Computer Engineering % University of Wisconsin-Madison% 1415 Engineering Drive% Madison, WI 53706-1691% 608-265-5739% hagness@%% Date of this version: February 2000%% This MATLAB M-file implements the finite-difference time-domain % solution of Maxwell's curl equations over a three-dimensional% Cartesian space lattice comprised of uniform cubic grid cells.%% To illustrate the algorithm, an air-filled rectangular cavity% resonator is modeled. The length, width, and height of the% cavity are 10.0 cm (x-direction), 4.8 cm (y-direction), and% 2.0 cm (z-direction), respectively.% conditions:% ex(i,j,k)=0 on the j=1, j=jb, k=1, and k=kb planes% ey(i,j,k)=0 on the i=1, i=ib, k=1, and k=kb planes% ez(i,j,k)=0 on the i=1, i=ib, j=1, and j=jb planes% These PEC boundaries form the outer lossless walls of the cavity. %% The cavity is excited by an additive current source oriented% along the z-direction. The source waveform is a differentiated% Gaussian pulse given by% J(t)=-J0*(t-t0)*exp(-(t-t0)^2/tau^2),% where tau=50 ps. The FWHM spectral bandwidth of this zero-dc- % content pulse is approximately 7 GHz. The grid resolution% (dx = 2 mm) was chosen to provide at least 10 samples per% wavelength up through 15 GHz.%% To execute this M-file, type "fdtd3D" at the MATLAB prompt.% This M-file displays the FDTD-computed Ez fields at every other % time step, and records those frames in a movie matrix, M, which % is played at the end of the simulation using the "movie" command. %%***********************************************************************clear%***********************************************************************% Fundamental constants%***********************************************************************cc=2.99792458e8; %speed of light in free spacemuz=4.0*pi*1.0e-7; %permeability of free spaceepsz=1.0/(cc*cc*muz); %permittivity of free space%*********************************************************************** % Grid parameters%***********************************************************************ie=50; %number of grid cells in x-directionje=24; %number of grid cells in y-directionke=10; %number of grid cells in z-directionib=ie+1;jb=je+1;kb=ke+1;is=26; %location of z-directed current sourcejs=13; %location of z-directed current sourcekobs=5;dx=0.002; %space increment of cubic latticedt=dx/(2.0*cc); %time stepnmax=500; %total number of time steps%*********************************************************************** % Differentiated Gaussian pulse excitation%***********************************************************************rtau=50.0e-12;tau=rtau/dt;ndelay=3*tau;srcconst=-dt*3.0e+11;%*********************************************************************** % Material parameters%***********************************************************************eps=1.0;sig=0.0;%*********************************************************************** % Updating coefficients%***********************************************************************ca=(1.0-(dt*sig)/(2.0*epsz*eps))/(1.0+(dt*sig)/(2.0*epsz*eps));cb=(dt/epsz/eps/dx)/(1.0+(dt*sig)/(2.0*epsz*eps));da=1.0;db=dt/muz/dx;%*********************************************************************** % Field arrays%***********************************************************************ex=zeros(ie,jb,kb);ey=zeros(ib,je,kb);ez=zeros(ib,jb,ke);hx=zeros(ib,je,ke);hy=zeros(ie,jb,ke);hz=zeros(ie,je,kb);%*********************************************************************** % Movie initialization%***********************************************************************tview(:,:)=ez(:,:,kobs);sview(:,:)=ez(:,js,:);subplot('position',[0.15 0.45 0.7 0.45]),pcolor(tview');shading flat;caxis([-1.0 1.0]);colorbar;axis image;title(['Ez(i,j,k=5), time step = 0']);xlabel('i coordinate');ylabel('j coordinate');subplot('position',[0.15 0.10 0.7 0.25]),pcolor(sview');shading flat;caxis([-1.0 1.0]);colorbar;axis image;title(['Ez(i,j=13,k), time step = 0']);xlabel('i coordinate');ylabel('k coordinate');rect=get(gcf,'Position');rect(1:2)=[0 0];M=moviein(nmax/2,gcf,rect);%*********************************************************************** % BEGIN TIME-STEPPING LOOP%*********************************************************************** for n=1:nmax%*********************************************************************** % Update electric fields%***********************************************************************ex(1:ie,2:je,2:ke)=ca*ex(1:ie,2:je,2:ke)+...cb*(hz(1:ie,2:je,2:ke)-hz(1:ie,1:je-1,2:ke)+...hy(1:ie,2:je,1:ke-1)-hy(1:ie,2:je,2:ke));ey(2:ie,1:je,2:ke)=ca*ey(2:ie,1:je,2:ke)+...cb*(hx(2:ie,1:je,2:ke)-hx(2:ie,1:je,1:ke-1)+...hz(1:ie-1,1:je,2:ke)-hz(2:ie,1:je,2:ke));ez(2:ie,2:je,1:ke)=ca*ez(2:ie,2:je,1:ke)+...cb*(hx(2:ie,1:je-1,1:ke)-hx(2:ie,2:je,1:ke)+...hy(2:ie,2:je,1:ke)-hy(1:ie-1,2:je,1:ke));ez(is,js,1:ke)=ez(is,js,1:ke)+...srcconst*(n-ndelay)*exp(-((n-ndelay)^2/tau^2));%*********************************************************************** % Update magnetic fields%***********************************************************************hx(2:ie,1:je,1:ke)=hx(2:ie,1:je,1:ke)+...db*(ey(2:ie,1:je,2:kb)-ey(2:ie,1:je,1:ke)+...ez(2:ie,1:je,1:ke)-ez(2:ie,2:jb,1:ke));hy(1:ie,2:je,1:ke)=hy(1:ie,2:je,1:ke)+...db*(ex(1:ie,2:je,1:ke)-ex(1:ie,2:je,2:kb)+...ez(2:ib,2:je,1:ke)-ez(1:ie,2:je,1:ke));hz(1:ie,1:je,2:ke)=hz(1:ie,1:je,2:ke)+...db*(ex(1:ie,2:jb,2:ke)-ex(1:ie,1:je,2:ke)+...ey(1:ie,1:je,2:ke)-ey(2:ib,1:je,2:ke));%*********************************************************************** % Visualize fields%*********************************************************************** if mod(n,2)==0;timestep=int2str(n);tview(:,:)=ez(:,:,kobs);sview(:,:)=ez(:,js,:);subplot('position',[0.15 0.45 0.7 0.45]),pcolor(tview');shading flat;caxis([-1.0 1.0]);colorbar;axis image;title(['Ez(i,j,k=5), time step = ',timestep]);xlabel('i coordinate');ylabel('j coordinate');subplot('position',[0.15 0.10 0.7 0.25]),pcolor(sview');shading flat;caxis([-1.0 1.0]);colorbar;axis image;title(['Ez(i,j=13,k), time step = ',timestep]);xlabel('i coordinate');ylabel('k coordinate');nn=n/2;M(:,nn)=getframe(gcf,rect);end;%*********************************************************************** % END TIME-STEPPING LOOP%*********************************************************************** endmovie(gcf,M,0,10,rect);。