用c语言实现串口读写程序
51单片机的串口通信程序(C语言)
51单片机的串口通信程序(C语言) 51单片机的串口通信程序(C语言)在嵌入式系统中,串口通信是一种常见的数据传输方式,也是单片机与外部设备进行通信的重要手段之一。
本文将介绍使用C语言编写51单片机的串口通信程序。
1. 硬件准备在开始编写串口通信程序之前,需要准备好相应的硬件设备。
首先,我们需要一块51单片机开发板,内置了串口通信功能。
另外,我们还需要连接一个与单片机通信的外部设备,例如计算机或其他单片机。
2. 引入头文件在C语言中,我们需要引入相应的头文件来使用串口通信相关的函数。
在51单片机中,我们需要引入reg51.h头文件,以便使用单片机的寄存器操作相关函数。
同时,我们还需要引入头文件来定义串口通信的相关寄存器。
3. 配置串口参数在使用串口通信之前,我们需要配置串口的参数,例如波特率、数据位、停止位等。
这些参数的配置需要根据实际需要进行调整。
在51单片机中,我们可以通过写入相应的寄存器来配置串口参数。
4. 初始化串口在配置完串口参数之后,我们需要初始化串口,以便开始进行数据的发送和接收。
初始化串口的过程包括打开串口、设置中断等。
5. 数据发送在串口通信中,数据的发送通常分为两种方式:阻塞发送和非阻塞发送。
阻塞发送是指程序在发送完数据之后才会继续执行下面的代码,而非阻塞发送是指程序在发送数据的同时可以继续执行其他代码。
6. 数据接收数据的接收与数据的发送类似,同样有阻塞接收和非阻塞接收两种方式。
在接收数据时,需要不断地检测是否有数据到达,并及时进行处理。
7. 中断处理在串口通信中,中断是一种常见的处理方式。
通过使用中断,可以及时地响应串口数据的到达或者发送完成等事件,提高程序的处理效率。
8. 串口通信实例下面是一个简单的串口通信实例,用于在51单片机与计算机之间进行数据的传输。
```c#include <reg51.h>#include <stdio.h>#define BAUDRATE 9600#define FOSC 11059200void UART_init(){TMOD = 0x20; // 设置定时器1为模式2SCON = 0x50; // 设置串口为模式1,允许接收TH1 = 256 - FOSC / 12 / 32 / BAUDRATE; // 计算波特率定时器重载值TR1 = 1; // 启动定时器1EA = 1; // 允许中断ES = 1; // 允许串口中断}void UART_send_byte(unsigned char byte){SBUF = byte;while (!TI); // 等待发送完成TI = 0; // 清除发送完成标志位}unsigned char UART_receive_byte(){while (!RI); // 等待接收完成RI = 0; // 清除接收完成标志位return SBUF;}void UART_send_string(char *s){while (*s){UART_send_byte(*s);s++;}}void main(){UART_init();UART_send_string("Hello, World!"); while (1){unsigned char data = UART_receive_byte();// 对接收到的数据进行处理}}```总结:通过以上步骤,我们可以编写出简单的51单片机串口通信程序。
c语言怎么写串口通信编程 -回复
c语言怎么写串口通信编程 -回复在C语言中进行串口通信编程,你需要了解串口的基本原理以及相关的函数和库。
串口通信是一种通过串行数据传输进行通信的方式,常用于嵌入式系统中与外部设备进行数据交互。
本文将以步骤的形式来介绍如何在C语言中进行串口通信编程。
步骤一:了解串口的基本原理在开始串口通信编程之前,你需要了解串口的基本原理。
串口是通过发送和接收数据位的序列来进行通信的。
串口通信需要考虑的一些参数包括波特率(即数据传输速率)、数据位数、校验位和停止位等。
波特率指的是每秒钟传输的位数,可以是常用的9600、19200、38400等。
步骤二:选择合适的串口库在C语言中,你可以选择使用合适的串口库来简化串口通信的编程工作。
常见的串口库包括Windows系统中的WinAPI、Linux系统中的termios库等。
选择库的时候,需根据你所使用的操作系统和开发环境进行选择。
步骤三:打开串口在开始使用串口进行通信之前,需要先打开串口。
使用串口库的函数,可以根据需要选择打开特定的串口,一般通过指定串口名称或者端口号来进行打开。
打开串口的函数可能返回一个文件描述符或者句柄,用于后续的读写操作。
步骤四:配置串口参数打开串口之后,需要进行串口参数的配置。
这包括波特率、数据位数、校验位和停止位等参数的设置。
一般通过调用相应的函数,将需要设置的参数传递给串口库,以完成参数的配置。
步骤五:读取串口数据配置完串口参数后,你可以开始读取串口数据。
通过调用读取函数,你可以从串口接收缓冲区中获取数据,并进一步进行处理。
读取函数可能会阻塞程序执行,直到有数据可读取为止。
步骤六:发送串口数据与读取串口数据相对应的是发送串口数据。
通过调用相应的发送函数,你可以将你要发送的数据写入串口发送缓冲区,等待发送。
发送函数可能会阻塞程序执行,直到数据成功发送。
步骤七:关闭串口在程序结束时,需要关闭已经打开的串口。
通过调用相应的函数,可以完成串口的关闭。
windows下c++ 串口编程实例

windows下c++ 串口编程实例在Windows 下进行串口编程,可以使用WinAPI 中的一些函数。
以下是一个简单的C++ 示例,演示如何打开串口、配置串口参数、读取和写入数据。
请注意,这只是一个基本的示例,实际应用中可能需要更多的错误处理和稳健性。
```cpp#include <windows.h>#include <iostream>int main() {// 打开串口HANDLE hSerial = CreateFile("COM1", GENERIC_READ | GENERIC_WRITE, 0, 0, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, 0);if (hSerial == INVALID_HANDLE_VALUE) {std::cerr << "Error opening serial port\n";return 1;}// 配置串口参数DCB dcbSerialParams = {0};dcbSerialParams.DCBlength = sizeof(dcbSerialParams);if (!GetCommState(hSerial, &dcbSerialParams)) {std::cerr << "Error getting serial port state\n";CloseHandle(hSerial);return 1;}dcbSerialParams.BaudRate = CBR_9600; // 波特率dcbSerialParams.ByteSize = 8; // 数据位dcbSerialParams.StopBits = ONESTOPBIT; // 停止位dcbSerialParams.Parity = NOPARITY; // 奇偶校验if (!SetCommState(hSerial, &dcbSerialParams)) {std::cerr << "Error setting serial port state\n";CloseHandle(hSerial);return 1;}// 读取数据char buffer[256];DWORD bytesRead;if (ReadFile(hSerial, buffer, sizeof(buffer), &bytesRead, nullptr)) {std::cout << "Read " << bytesRead << " bytes from serial port\n";} else {std::cerr << "Error reading from serial port\n";}// 写入数据const char* data = "Hello, Serial Port!";DWORD bytesWritten;if (WriteFile(hSerial, data, strlen(data), &bytesWritten, nullptr)) {std::cout << "Wrote " << bytesWritten << " bytes to serial port\n";} else {std::cerr << "Error writing to serial port\n";}// 关闭串口CloseHandle(hSerial);return 0;}```请注意,上述代码中打开串口的地方使用了`"COM1"`,你可能需要根据实际情况更改串口名称。
C语言实现串口通信
C语言实现串口通信在使用系统调用函数进行串口通信之前,需要打开串口设备并设置相关参数。
打开串口设备可以使用open(函数,设置串口参数可以使用termios结构体和tcsetattr(函数。
以下是一个简单的串口通信接收数据的示例代码:```c#include <stdio.h>#include <stdlib.h>#include <fcntl.h>#include <unistd.h>#include <termios.h>int mainint fd; // 串口设备文件描述符char buff[255]; // 存储接收到的数据int len; // 接收到的数据长度//打开串口设备fd = open("/dev/ttyS0", O_RDONLY);if (fd < 0)perror("Failed to open serial port");return -1;}//设置串口参数struct termios options;tcgetattr(fd, &options);cfsetspeed(&options, B1200); // 设置波特率为1200 tcsetattr(fd, TCSANOW, &options);//接收数据while (1)len = read(fd, buff, sizeof(buff)); // 从串口读取数据if (len > 0)buff[len] = '\0'; // 将接收到的数据转为字符串printf("Received data: %s\n", buff);}}//关闭串口设备close(fd);return 0;```这段代码首先通过open(函数打开串口设备文件"/dev/ttyS0",然后使用tcgetattr(函数获取当前设置的串口参数,接着使用cfsetspeed(函数设置波特率为1200,最后使用tcsetattr(函数将设置好的串口参数写回。
Linux下串口操作-嵌入式-C语言实现

Linux下串⼝操作-嵌⼊式-C语⾔实现1.找到串⼝的设备号在linux系统下,所有的设备都是⽂件,所以要先找到串⼝这个设备⽂件,之后就可以对这个串⼝进⾏操作。
#define UART_DEV "/dev/tty*" ///dev/tty**串⼝号2.打开串⼝并初始化串⼝串⼝的打开只需要⼀个open函数就可以打开,下⾯有⼀个初始化的函数,先将串⼝打开,如果打开成功,会返回⼀个设备描述符int uart_init(void ){int fd=0;fd = open(UART_DEV , O_RDWR|O_NOCTTY|O_NDELAY, 0);if (fd < 0){printf("open error!\n");return -1;}set_opt(fd);return fd;}set_opt函数⽤于设置串⼝的相关基本参数,⼀般串⼝都会设置波特率什么的,其余的参数可以⽤到的时候再查询是什么意思,set_opt函数的定义如下:int set_opt(int fd){struct termios old_cfg, new_cfg;tcgetattr(fd, &new_cfg);new_cfg.c_cflag |= (CLOCAL | CREAD);cfsetispeed(&new_cfg, B9600);//设置波特率cfsetospeed(&new_cfg, B9600);new_cfg.c_cflag &= ~CSIZE;new_cfg.c_cflag |= CS8;new_cfg.c_cflag &= ~PARENB;new_cfg.c_cflag &= ~CSTOPB;new_cfg.c_cc[VTIME] = 0;new_cfg.c_cc[VMIN] = 0;tcflush(fd,TCIFLUSH);tcsetattr(fd, TCSANOW, &new_cfg);return0;}这样设置好了以后,串⼝的初始化基本就完成了。
51单片机的串口通信程序(C语言)
#include <reg52.h>#include<intrins.h>#include <stdio.h>#include <math.h>#define uchar unsigned char#define uint unsigned intsbit Key1 = P2^3;sbit Key2 = P2^2;sbit Key3 = P2^1;sbit Key4 = P2^0;sbit BELL = P3^6;sbit CONNECT = P3^7;unsigned int Key1_flag = 0;unsigned int Key2_flag = 0;unsigned int Key3_flag = 0;unsigned int Key4_flag = 0;unsigned char b;unsigned char code Num[21]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00, 0x10,0x89};unsigned char code Disdigit[4] = {0x7F,0xBF,0xDF,0xEF};unsigned char Disbuf[4];void delayms(uint t){uint i;while(t--){/* 对于11.0592M时钟,约延时1ms */for (i=0;i<125;i++){}}}//-----------------------------------------------------void SendData(uchar Dat){uchar i=0;SBUF = Dat;while (1){if(TI){TI=0;break;}}}void ScanKey(){if(Key1 == 0){delayms(100); if(Key1 == 0){Key1_flag = 1; Key2_flag = 0; Key3_flag = 0;Key4_flag = 0;Key1 = 1;}else;}if(Key2 == 0){delayms(100);if(Key2 == 0){Key2_flag = 1; Key1_flag = 0; Key3_flag = 0;Key4_flag = 0;Key2 = 1;}else;}if(Key3 == 0){delayms(50);if(Key3 == 0){Key3_flag = 1; Key1_flag = 0; Key2_flag = 0;Key4_flag = 0;Key3 = 1;}else;}if(Key4 == 0){delayms(50);if(Key4 == 0){Key4_flag = 1;Key1_flag = 0;Key2_flag = 0;Key3_flag = 0;Key4 = 1;}else;}else;}void KeyProc(){if(Key1_flag){TR1 = 1;SendData(0x55);Key1_flag = 0; }else if(Key2_flag){TR1 = 1;SendData(0x11); Key2_flag = 0;}else if(Key3_flag) {P1=0xff;BELL = 0;CONNECT = 1;Key3_flag = 0;}else if(Key4_flag){CONNECT = 0;BELL = 1;Key4_flag = 0;}else;}void Initdisplay(void){Disbuf[0] = 1;Disbuf[1] = 2;Disbuf[2] = 3;Disbuf[3] = 4;}void Display() //显示{unsigned int i = 0;unsigned int temp,count;temp = Disdigit[count]; P2 =temp;temp = Disbuf[count];temp = Num[temp];P0 =temp;count++;if (count==4)count=0;}void time0() interrupt 1 using 2 {Display();TH0 = (65535 - 2000)/256;TL0 = (65535 - 2000)%256;}void main(){Initdisplay();TMOD = 0x21;TH0 = (65535 - 2000)/256;TL0 = (65535 - 2000)%256;TR0 = 1;ET0 = 1;TH1 = 0xFD; //11.0592MTL1 = 0xFD;PCON&=0x80;TR1 = 1;ET1 = 1;SCON = 0x40; //串口方式REN = 1;PT1 = 0;PT0 = 1;EA = 1;while(1){ScanKey();KeyProc();if(RI){Disbuf[0] = 0;Disbuf[1] = 20;Disbuf[2] = SBUF>>4;Disbuf[3] = SBUF&0x0f;RI = 0;}else;}}51单片机串口通信C语言程序2**************************************************************; 平凡单片机工作室;ckss.asm;功能:反复向主机送AA和55两个数;主机使用一个串口调试软件设置19200,n,8,1***************************************************************/#include "reg51.h"#define uchar unsigned char#define uint unsigned int//延时程序//////////////////由Delay参数确定延迟时间*/void mDelay(unsigned int Delay){ unsigned int i;for(;Delay>0;Delay--){ for(i=0;i<124;i++){;}}}//////////////////// 主程序////////////////////void main(){ uchar OutDat; //定义输出变量TMOD=0x20; //TMOD=0TH1=0xf3; //12MHZ ,BPS:4800,N,8,1TL1=0xf3;PCON=0x80; //方式一TR1=1; //?????????????????????????????SCON=0x40; //串口通信控制寄存器模式一OutDat=0xaa; //向串口发送固定数据值for(;;) //循环程序{SBUF=OutDat;//发送数据for(;;){ if(TI) //发送中断位当发送停止位时置1,表示发送完成break;}mDelay(500);TI=0; //清零中断位OutDat=~OutDat; //显示内容按位取反}}。
串口读取数据的方法
串口读取数据的方法1.打开串口:首先需要打开串口,通过设备文件或串口号来指定要打开的串口。
```c++#include <stdio.h>#include <fcntl.h>#include <termios.h>int openSerialPort(const char* portName)int fd = open(portName, O_RDWR , O_NOCTTY);if (fd < 0)printf("Failed to open serial port\n");return -1;}//配置串口参数struct termios options;tcgetattr(fd, &options);cfsetispeed(&options, B9600);cfsetospeed(&options, B9600);options.c_cflag ,= (CLOCAL , CREAD);tcsetattr(fd, TCSANOW, &options);return fd;}```2.读取串口数据:打开串口之后,可以通过读取文件描述符来读取串口数据。
```c++int readSerialData(int fd, unsigned char* buffer, int bufferSize)int bytesRead = read(fd, buffer, bufferSize);if (bytesRead < 0)printf("Failed to read serial data\n");}return bytesRead;}```3.解析串口数据:读取到的数据可能是原始的字节流,需要根据具体的协议和数据格式进行解析。
```c++void parseData(unsigned char* buffer, int bufferSize)//解析数据的逻辑}```4.循环读取数据:可以使用循环来不断读取串口数据,并进行解析和处理。
c语言串口编程实例
c语言串口编程实例摘要:1.串口编程基础2.C 语言串口编程步骤3.C 语言串口编程实例4.实例详解5.总结正文:一、串口编程基础串口编程是指通过计算机串行接口进行数据通信的编程方式。
串口(Serial Port)是一种计算机硬件接口,可以通过串行通信传输数据。
与并行通信相比,串行通信只需一条数据线,传输速度较慢,但具有线路简单、成本低的优点。
因此,串口编程在电子设备、计算机外设、通信设备等领域有广泛的应用。
二、C 语言串口编程步骤1.包含头文件:在使用C 语言进行串口编程时,首先需要包含头文件`<reg52.h>`或`<intrins.h>`。
2.配置串口:配置串口包括设置波特率、数据位、停止位、奇偶校验等参数。
3.初始化串口:初始化串口主要是初始化串口硬件,如配置UART(通用异步收发器)等。
4.打开串口:打开串口是指使能串口通信功能,以便数据传输。
5.读写串口:通过`in`和`out`语句实现数据的输入输出。
6.关闭串口:在数据传输完成后,需要关闭串口以节省资源。
7.串口通信:通过循环寄存器、缓存寄存器或FIFO(先进先出)等方法实现数据的收发。
三、C 语言串口编程实例以下是一个简单的C 语言串口编程实例,该实例通过串口发送数据“Hello, World!”:```c#include <reg52.h>#include <intrins.h>sbit UART_TXD = P3^1; // 配置UART TXD 引脚void init_uart(); // 初始化UART 函数void send_data(unsigned char dat); // 发送数据函数void main(){init_uart(); // 初始化UARTsend_data("H"); // 发送字符"H"send_data("e"); // 发送字符"e"send_data("l"); // 发送字符"l"send_data("l"); // 发送字符"o"send_data(" "); // 发送空格send_data("W"); // 发送字符"W"send_data("o"); // 发送字符"r"send_data("r"); // 发送字符"l"send_data("d"); // 发送字符"d"while(1); // 循环等待}void init_uart() // 初始化UART 函数{TMOD = 0x20; // 设置定时器1 为工作状态TH1 = 0xfd; // 设置定时器1 的计数值TL1 = 0xfd; // 设置定时器1 的计数值TR1 = 1; // 使能定时器1SCON = 0x40; // 设置串口工作状态ES = 0; // 开总中断EA = 1; // 开总中断允许}void send_data(unsigned char dat) // 发送数据函数{SBUF = dat; // 将数据存入缓存寄存器while(!TI); // 等待发送缓存清空TI = 0; // 清空发送缓存}```四、实例详解1.配置串口:通过设置UART TXD 引脚为P3.1,确定波特率、数据位、停止位和奇偶校验等参数。
一个c语言的串口通信程序范例
#include 〈stdio.h>#include <dos。
h>#include <conio。
h〉#include <string。
h〉#define COM232 0x2f8#define COMINT 0x0b#define MaxBufLen 500#define Port8259 0x20#define EofInt 0x20static int comportaddr;static char intvectnum;static unsigned char maskb;static unsigned char Buffer[MaxBufLen];static int CharsInBuf,CircIn,CircOut;static void (interrupt far *OldAsyncInt)();static void interrupt far AsyncInt(void);void Init_COM(int ComPortAddr, unsigned char IntVectNum, int Baud, unsigned char Data, unsigned char Stop, unsigned char Parity){unsigned char High,Low;int f;comportaddr=ComPortAddr;intvectnum=IntVectNum;CharsInBuf=0;CircIn=0;CircOut=0;f=(Baud/100);f=1152/f; High=f/256;Low=f-High*256;outp(ComPortAddr+3,0x80);outp(ComPortAddr,Low);outp(ComPortAddr+1,High);Data=(Data-5)|((Stop-1)*4);if(Parity==2) Data=Data|0x18;else if(Parity==1) Data=Data|0x8;outp(ComPortAddr+3,Data);outp(ComPortAddr+4,0x0a);outp(ComPortAddr+1,0x01);disable();OldAsyncInt=getvect( IntVectNum ); setvect( IntVectNum, AsyncInt );enable();maskb=inp(Port8259+1);if(IntVectNum==0x0c)outp(Port8259+1,maskb&0xef); else outp(Port8259+1,maskb&0xf7);}static void interrupt far AsyncInt(void){disable();if(CharsInBuf<MaxBufLen)Buffer[CircIn]=inp(comportaddr);if(CircIn〈MaxBufLen-1) CircIn++;else CircIn=0;if(CircIn==CircOut) CircOut++;else CharsInBuf++;enable();outp(Port8259,EofInt);}void Restore(void){setvect(intvectnum,OldAsyncInt);outp(Port8259+1,maskb);}int GetCharInBuf(unsigned char *Char)int Flag;Flag=—1;if(CharsInBuf>0){(*Char)=Buffer[CircOut];if(CircOut<MaxBufLen—1)CircOut++;else CircOut=0;CharsInBuf—-;Flag=0;}return Flag;}int SendChar(unsigned char Char){if((inp(comportaddr+5)&0x20)==0) return —1; outp(comportaddr,Char);return 0;}main(){int i,c;unsigned char InChar;Init_COM(COM232,COMINT,1200,8,1,0); while(1){if(kbhit()){if((InChar=getch())==27)break;else while(SendChar(InChar));}if(GetCharInBuf(&InChar)==0)printf("%c",InChar);}Restore();}。
模拟串口的三种方法及C语言
模拟串口的三种方法及C语言模拟串口是软件中模拟实现串口通信的一种方法,它是在电脑上通过软件模拟两个串口之间的传输,用来测试、调试串口相关的应用程序。
本文将介绍三种常见的模拟串口的方法,并提供C语言代码示例。
1.使用虚拟串口软件虚拟串口软件是一种用于模拟串口通信的应用程序。
它创建了虚拟的串口设备,使其在电脑上模拟出真实的串口通信环境。
通过虚拟串口软件,可以实现串口的模拟收发数据,可以连接到串口测试工具、串口调试工具或者自己编写的串口通信程序上。
以下是一个使用虚拟串口软件模拟串口通信的C语言代码示例:```c#include <stdio.h>#include <windows.h>int mai//打开虚拟串口//检测串口是否成功打开printf("Error in opening serial port\n");return 1;}//进行串口通信操作,如发送、接收数据//关闭串口return 0;```在这个示例中,我们使用了Windows操作系统的函数`CreateFile`来打开一个虚拟串口,这里的串口名称是"COM1"。
然后可以调用相关函数进行串口通信操作,最后用`CloseHandle`函数关闭串口。
2.使用串口驱动模拟在一些情况下,可以通过修改电脑的串口驱动程序来模拟串口通信。
这种方法需要更深入的了解操作系统的底层机制,并进行驱动程序的开发和修改。
通过修改串口驱动程序,可以模拟出一个虚拟的串口设备,通过这个设备进行串口通信。
以下是一个简单的C语言代码示例,用于修改串口驱动程序来模拟串口通信:```c#include <stdio.h>#include <fcntl.h>#include <unistd.h>int maiint fd;//打开串口设备fd = open("/dev/ttyS0", O_RDWR);//检测串口是否成功打开if (fd < 0)printf("Error in opening serial port\n");return 1;}//进行串口通信操作,如发送、接收数据//关闭串口设备close(fd);return 0;```在这个示例中,我们使用了Linux操作系统的函数`open`来打开一个串口设备,这里的设备名称是"/dev/ttyS0"。
linux c语言 串口读取数据的方法

linux c语言串口读取数据的方法Linux下使用C语言读取串口数据的方法引言:串口是计算机和外部设备进行通信的一种重要的通信接口。
在Linux系统中,要使用C语言读取串口数据,需要通过打开串口设备文件,设置串口参数,并进行读取数据的操作。
本文将介绍如何通过C语言在Linux下读取串口数据的方法。
目录:1. 了解串口的工作原理2. 打开串口设备文件3. 设置串口参数4. 读取串口数据5. 示例程序6. 总结1. 了解串口的工作原理:在开始编写C语言读取串口数据的方法前,首先需要了解串口的工作原理。
串口是通过硬件电路实现两台设备之间的数据传输,属于一种异步串行通信方式。
典型的串口包含发送数据引脚(TX)、接收数据引脚(RX)、数据位、停止位、奇偶校验位等。
2. 打开串口设备文件:在Linux系统中,每个串口设备都被映射到一个设备文件上,例如/dev/ttyS0代表第一个串口设备,/dev/ttyUSB0代表第一个USB串口设备。
要使用C语言读取串口数据,需要首先打开相应的串口设备文件。
在C语言中,使用open()函数打开串口设备文件。
open()函数的原型如下:cint open(const char *pathname, int flags);其中pathname参数指定要打开的串口设备文件路径,flags参数指定打开方式。
常用的flags参数有O_RDONLY(只读方式打开)、O_WRONLY (只写方式打开)和O_RDWR(读写方式打开)。
例如,要打开第一个串口设备文件,可以调用open()函数如下:cint fd = open("/dev/ttyS0", O_RDWR);if (fd == -1){perror("Error opening serial port");return -1;}当open()函数成功打开串口设备文件时,会返回一个非负整数的文件描述符fd,用于后续的操作。
C语言 做串口通讯程序
一、引言:现在在工业现场很少有人再用C语言做串口通讯程序了,但是基于DOS环境的程序还是有它的优势的。
DOS系统的单任务环境是系统运行更加稳定、可靠;在一些追求很高的可靠性的系统中还是有一定的价值的。
本文通过C语言控制PLC实现简单的物料传送为例子。
二、硬件介绍:1、CPM1A采用RS232串口通讯与上位机连接,在PLC的DM区中可以设定串口参数,本文采用默认值:串口通信格式:1位---起始位、9600---波特率、7位---数据位、2位---停止位、偶校验2、C语言中用于串口读写的函数:bioscom,在bios.h头文件中。
Bioscom用法:bioscom(int cmd,char byte,int port)Cmd的值:0 设置通信参数为btye值1 发送一个字符到串口2 从串口接收一个字符3 返回串口端口的状态byte的值:0x02 7数据位0x03 8位数据位0x00 1个停止位0x04 2个停止位0x00 无奇偶校验0x08奇校验0x18偶校验0x80 1200波特率0xA0 2400波特率0xC0 4800波特率0xE0 9600波特率注意:在对串口初始化时,上述参数值相或附给byte。
Port的值:0 端口11 端口2三、完整源代码:#include /* 此头函数请不要删除*/#include#include#define F1 0x3B /*启动*/#define F2 0x3C /*停止*/#define F3 0x3D /*混料*/#define F4 0x3E /*出料*/#define F5 0x3F /*退出*/#define PORT 0 /*定义端口号*/#define SETTINGS (0x02|0x04|0x18|0xE0) /*设定参数*//* 定义发送字符函数send */void sendPort(int port,char cc){union{char ch[2];int status;}port_status;/*发送一个字符*/port_status.status=bioscom(1,cc,port);printf("%c",cc); /*判断发送是否正确*/if(port_status.ch[1]&128){printf("Send data error detected in serial port"); printf("\r");}}/* Check-Status 检查端口*/int check_status(int port){int status;status=bioscom(3,0,port);if(status & 0x100)return 0;else return 1;}/*发送命令函数*/void SendOder(char od[]){int i=0;for(i=0;i<=16;i++)sendPort(PORT,od[i]);}/*应用程序主体*/main(){int key=1,i,m=1;int check=1;char a[20]="@00WR0000000144*"; /*启动00*/ char b[20]="@00WR0000000441*"; /*混料02*/ char c[20]="@00WR000000084D*"; /*出料03*/ char d[20]="@00WR0000000247*"; /*停止01*/ a[16]='\r';b[16]='\r';c[16]='\r';d[16]='\r';printf("启动:F1 \t混料:F2 \t出料:F3");printf(" \t停止:F4 \t退出:F5\n");bioscom(0,SETTINGS,PORT); /*初始化串口*/ while(check!=0) /*检查端口状态*/{m+=1;check=check_status(PORT);if(m>=1000)break;}while (1){while (bioskey(1)==0);key=bioskey(0);key=key&0xFF?0:key>>8;if(key==F1) /*启动命令*/{for(i=0;i<=16;i++){sendPort(PORT,a[i]);m=1;while(check!=0){m+=1;check=check_status(PORT); /*检查端口状态*/ if(m>=3000)break;}}}else if(key==F4) /*停止命令*/{for(i=0;i<=16;i++){sendPort(PORT,d[i]);m=1;while(check!=0){m+=1;check=check_status(PORT);if(m>=3000)break;}}}else if(key==F2) /*混料命令*/{for(i=0;i<=16;i++){sendPort(PORT,b[i]);m=1;while(check!=0){m+=1;check=check_status(PORT);if(m>=3000)break;}}}else if(key==F3) /*出料命令*/{for(i=0;i<=16;i++){sendPort(PORT,c[i]);m=1;while(check!=0){m+=1;check=check_status(PORT);if(m>=3000)break;}}}else if(key==F5)exit(1); /*退出命令*/}getch(); /* 此语句请不要删除*/}四、结束语RS232串口通讯在小型的控制系统同中还是应用广泛的,本文采用C语言控制,主要是给用户提供一个新的控制方式做选择。
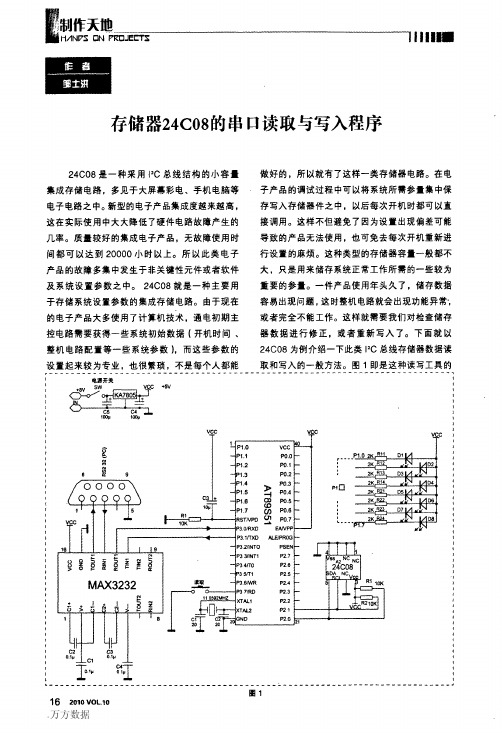
存储器24C08的串口读取与写入程序
等变化会产生一定波动。这种频率波动极为微小。而
且仅是围绕中心频率的窄幅波动,所以双方时钟自身
的频率漂移对异步传输的影响可谓微乎其微.完全可
以忽略不计的。但是这两种时钟中心频率的差异是固
定不变的。虽然在异步通讯的初始化期间两种时钟被
同步,但是随时问推移它们的相位差又会逐步拉大。
达到一定程度。必然会导致双方的数据传输出现混乱。
循环移位。先期发出的数据将被复写,直至收到
取到两字节数据后,内部相应地址储存的数据将
发送方传来的停机信号,接收完成,最后接收的
在串行时钟配合下,移位串行从SDA引脚输出。
16字节数据被保留,之后24C08正式进入真正
此类存储器的读取都比较简单,采用连续的方式’ 的写入过程。此时外部总线上任何的电压变化都
由于rs232通讯多数情况下不采取同步传输的方式而是由通讯双方事先对数据格式以及传输速率这两种异步传输必要的两种参量进行约定种单字节数据传输方式即由数据发送方先送出一位起始信号随后发送8位1个字节的数据完成后立即发送一位停止信号以这样一个过程做为一次完整的异步数据传输
譬翌热一Ⅲ哪 存储器24C08的串口读取与写入程序
a
d {8 d {8 引蛇
EQU p2.0 EQU p2.1 EQU 08H EOU 09H
p37=p3‘7
i:=
p36=p3‘6
0000H
姚蚓删删洲蝴9吣巾帅
start
:===一==总线启动
i2c—start:
将导致双方RS232接口数据传送不能正常进行
setb
SCl
和24C08数据写入出错。那选择多少的传输速
可以提高程序执行的效率。在连续读取模式下。
不会得到响应.包括单片机发出的标准总线起动
c语言怎么写串口通信编程
c语言怎么写串口通信编程串口通信是一种广泛应用于嵌入式系统和电子设备之间的通信方式。
无论是嵌入式开发还是电子设备控制,串口通信都是常见的需求。
在C语言中,实现串口通信需要通过操作串口的硬件寄存器和使用相应的通信协议来实现数据的发送和接收。
本文将一步一步介绍如何使用C语言编写串口通信程序。
第一步:打开串口要开始串口通信,首先需要打开串口。
在C语言中,可以使用文件操作函数来打开串口设备。
通常,串口设备被命名为/dev/ttyS0,/dev/ttyS1等,具体名称取决于系统。
下面是一个打开串口设备的示例代码:cinclude <stdio.h>include <fcntl.h>include <termios.h>int open_serial_port(const char *port) {int fd = open(port, O_RDWR O_NOCTTYO_NDELAY);if (fd == -1) {perror("open_serial_port");return -1;}设置串口属性struct termios options;tcgetattr(fd, &options);cfmakeraw(&options);cfsetspeed(&options, B9600);tcsetattr(fd, TCSANOW, &options);return fd;}int main() {const char *port = "/dev/ttyS0";int fd = open_serial_port(port);if (fd == -1) {打开串口失败,处理错误return -1;}串口已打开,可以进行数据的读写操作return 0;}在上面的代码中,open_serial_port函数用于打开指定的串口设备并进行一些必要的设置。
qt串口通信c语言代码
qt串口通信c语言代码
引言概述:
QT串口通信是一种基于C语言的编程技术,它可以实现计算机与外部设备之间的数据交互。
本文将从五个大点出发,详细阐述QT串口通信的C语言代码实现。
正文内容:
1. 串口通信的基本原理
1.1 串口通信的定义和作用
1.2 串口通信的工作原理
1.3 串口通信的数据传输方式
2. QT串口通信的C语言代码实现
2.1 QT串口通信的环境搭建
2.2 QT串口通信的代码编写
2.3 QT串口通信的数据收发处理
3. QT串口通信的常见问题与解决方法
3.1 串口通信的波特率设置问题
3.2 数据传输的校验与校验位设置问题
3.3 数据的发送与接收缓冲区处理问题
4. QT串口通信的扩展功能
4.1 串口通信的多线程处理
4.2 串口通信的数据转换与解析
4.3 串口通信的错误处理与异常情况处理
5. QT串口通信的应用实例
5.1 串口通信在嵌入式系统中的应用
5.2 串口通信在数据采集与监控系统中的应用
5.3 串口通信在机器人控制系统中的应用
总结:
通过本文的阐述,我们了解了QT串口通信的C语言代码实现。
首先,我们介绍了串口通信的基本原理,包括定义和作用、工作原理以及数据传输方式。
然后,我们详细讲解了QT串口通信的C语言代码实现,包括环境搭建、代码编写和数据收发处理。
接着,我们列举了一些常见问题,并提供了解决方法。
此外,我们还介绍了QT串口通信的扩展功能和应用实例,展示了其在不同领域的应用前景。
通过学习和实践,我们可以更好地掌握QT串口通信的C语言代码编写技巧,为实际应用提供有力支持。
使用c语言编写串口读写程序
使用c语言编写串口读写程序标题:深入理解使用C语言编写串口读写程序摘要:本文将深入探讨使用C语言编写串口读写程序的多方面内容,从简介和基础知识开始,逐步展开到高级技术和应用示例。
我们将解释串口通信的原理,介绍C语言中串口读写函数的使用方法,并提供实用的代码示例和调试技巧。
通过阅读本文,您将能够全面理解如何使用C语言编写高质量且可靠的串口读写程序。
1. 引言通过串口通信,我们可以在计算机和外部设备之间进行可靠的数据传输。
在这一章节,我们将简要介绍串口通信的基本原理和特点。
2. 基础知识在了解串口通信的基础知识之前,我们将先讨论C语言中的基本I/O操作和串口通信相关的接口。
您将学习如何打开串口、设置串口参数并进行数据读写操作。
3. 串口读写函数本章节将详细介绍在C语言中使用串口读写函数进行数据收发的方法。
我们将重点关注常用的读写函数,并深入探讨它们的使用及注意事项。
4. 实用示例通过实用示例,我们将展示如何在C语言中编写具有实际功能的串口读写程序。
您将学习如何与外部设备进行通信,并处理收到的数据。
5. 调试技巧在本章节中,我们将分享一些常见的调试技巧和方法,以帮助您在编写串口读写程序时更高效地进行故障排除和问题解决。
6. 总结在本文的最后一节,我们将总结所学内容,并回顾关键点。
同时,我们将分享自己对串口读写程序的理解和观点,以提供更多的启示和思考。
总结:本文通过深入探讨使用C语言编写串口读写程序的相关知识,帮助读者全面理解串口通信的原理和实践。
您将学习如何在C语言中使用串口读写函数进行数据收发,并通过实用示例和调试技巧提升编程能力。
同时,我们分享了对串口读写程序的个人观点和理解,以帮助您在实际应用中更加灵活和创新地运用这些知识。
C#串口操作类,包括串口读写操作
C#串⼝操作类,包括串⼝读写操作串⼝进⾏操作的类,其中包括写和读操作,类可设置串⼝参数、设置接收函数、打开串⼝资源、关闭串⼝资源,操作完成后,⼀定要关闭串⼝、接收串⼝数据事件、接收数据出错事件、获取当前全部串⼝、把字节型转换成⼗六进制字符串等功能。
这个串⼝类已经过了调试,可以使⽤:using System;using System.Collections.Generic;using System.Text;using System.IO.Ports;using System.Globalization;namespace SerialClass{public class SerialClass{SerialPort _serialPort = null;//定义委托public delegate void SerialPortDataReceiveEventArgs(object sender, SerialDataReceivedEventArgs e, byte[] bits);//定义接收数据事件public event SerialPortDataReceiveEventArgs DataReceived;//定义接收错误事件//public event SerialErrorReceivedEventHandler Error;//接收事件是否有效 false表⽰有效public bool ReceiveEventFlag = false;#region 获取串⼝名private string protName;public string PortName{get { return _serialPort.PortName; }set{_serialPort.PortName = value;protName = value;}}#endregion#region 获取⽐特率private int baudRate;public int BaudRate{get { return _serialPort.BaudRate; }set{_serialPort.BaudRate = value;baudRate = value;}}#endregion#region 默认构造函数/// <summary>/// 默认构造函数,操作COM1,速度为9600,没有奇偶校验,8位字节,停⽌位为1 "COM1", 9600, Parity.None, 8, StopBits.One /// </summary>public SerialClass(){_serialPort = new SerialPort();}#endregion#region 构造函数/// <summary>/// 构造函数,/// </summary>/// <param name="comPortName"></param>public SerialClass(string comPortName){_serialPort = new SerialPort(comPortName);_serialPort.BaudRate = 9600;_serialPort.Parity = Parity.Even;_serialPort.DataBits = 8;_serialPort.StopBits = StopBits.One;_serialPort.Handshake = Handshake.None;_serialPort.RtsEnable = true;_serialPort.ReadTimeout = 2000;setSerialPort();}#endregion#region 构造函数,可以⾃定义串⼝的初始化参数/// <summary>/// 构造函数,可以⾃定义串⼝的初始化参数/// </summary>/// <param name="comPortName">需要操作的COM⼝名称</param>/// <param name="baudRate">COM的速度</param>/// <param name="parity">奇偶校验位</param>/// <param name="dataBits">数据长度</param>/// <param name="stopBits">停⽌位</param>public SerialClass(string comPortName, int baudRate, Parity parity, int dataBits, StopBits stopBits) {_serialPort = new SerialPort(comPortName, baudRate, parity, dataBits, stopBits);_serialPort.RtsEnable = true; //⾃动请求_serialPort.ReadTimeout = 3000;//超时setSerialPort();}#endregion#region 析构函数/// <summary>/// 析构函数,关闭串⼝/// </summary>~SerialClass(){if (_serialPort.IsOpen)_serialPort.Close();}#endregion#region 设置串⼝参数/// <summary>/// 设置串⼝参数/// </summary>/// <param name="comPortName">需要操作的COM⼝名称</param>/// <param name="baudRate">COM的速度</param>/// <param name="dataBits">数据长度</param>/// <param name="stopBits">停⽌位</param>public void setSerialPort(string comPortName, int baudRate, int dataBits, int stopBits ){if (_serialPort.IsOpen)_serialPort.Close();_serialPort.PortName = comPortName;_serialPort.BaudRate = baudRate;_serialPort.Parity = Parity.None;_serialPort.DataBits = dataBits;_serialPort.StopBits = (StopBits)stopBits;_serialPort.Handshake = Handshake.None;_serialPort.RtsEnable = false;_serialPort.ReadTimeout = 3000;_serialPort.NewLine = "/r/n";setSerialPort();}#endregion#region 设置接收函数/// <summary>/// 设置串⼝资源,还需重载多个设置串⼝的函数/// </summary>void setSerialPort(){if (_serialPort != null){//设置触发DataReceived事件的字节数为1_serialPort.ReceivedBytesThreshold = 1;//接收到⼀个字节时,也会触发DataReceived事件_serialPort.DataReceived += new SerialDataReceivedEventHandler(_serialPort_DataReceived); //接收数据出错,触发事件_serialPort.ErrorReceived += new SerialErrorReceivedEventHandler(_serialPort_ErrorReceived); //打开串⼝//openPort();}}#endregion#region 打开串⼝资源/// <summary>/// 打开串⼝资源/// <returns>返回bool类型</returns>/// </summary>public bool openPort(){bool ok = false;//如果串⼝是打开的,先关闭if (_serialPort.IsOpen)_serialPort.Close();try{//打开串⼝_serialPort.Open();ok = true;}catch (Exception Ex){throw Ex;}return ok;}#endregion#region 关闭串⼝/// <summary>/// 关闭串⼝资源,操作完成后,⼀定要关闭串⼝/// </summary>public void closePort(){//如果串⼝处于打开状态,则关闭if (_serialPort.IsOpen)_serialPort.Close();}#endregion#region 接收串⼝数据事件/// <summary>/// 接收串⼝数据事件/// </summary>/// <param name="sender"></param>/// <param name="e"></param>void _serialPort_DataReceived(object sender, SerialDataReceivedEventArgs e) {//禁⽌接收事件时直接退出if (ReceiveEventFlag){return;}try{System.Threading.Thread.Sleep(20);byte[] _data = new byte[_serialPort.BytesToRead];_serialPort.Read(_data, 0, _data.Length);if (_data.Length == 0) { return; }if (DataReceived != null){DataReceived(sender, e, _data);}//_serialPort.DiscardInBuffer(); //清空接收缓冲区}catch (Exception ex){throw ex;}}#endregion#region 接收数据出错事件/// <summary>/// 接收数据出错事件/// </summary>/// <param name="sender"></param>/// <param name="e"></param>void _serialPort_ErrorReceived(object sender, SerialErrorReceivedEventArgs e) {}#endregion#region 发送数据string类型public void SendData(string data){//发送数据//禁⽌接收事件时直接退出if (ReceiveEventFlag){return;}if (_serialPort.IsOpen){_serialPort.Write(data);}}#endregion#region 发送数据byte类型/// <summary>/// 数据发送/// </summary>/// <param name="data">要发送的数据字节</param>public void SendData(byte[] data, int offset, int count){//禁⽌接收事件时直接退出if (ReceiveEventFlag){return;}try{if (_serialPort.IsOpen){//_serialPort.DiscardInBuffer();//清空接收缓冲区_serialPort.Write(data, offset, count);}}catch (Exception ex){throw ex;}}#endregion#region 发送命令/// <summary>/// 发送命令/// </summary>/// <param name="SendData">发送数据</param>/// <param name="ReceiveData">接收数据</param>/// <param name="Overtime">超时时间</param>/// <returns></returns>public int SendCommand(byte[] SendData, ref byte[] ReceiveData, int Overtime) {if (_serialPort.IsOpen){try{ReceiveEventFlag = true; //关闭接收事件_serialPort.DiscardInBuffer(); //清空接收缓冲区_serialPort.Write(SendData, 0, SendData.Length);int num = 0, ret = 0;System.Threading.Thread.Sleep(10);ReceiveEventFlag = false; //打开事件while (num++ < Overtime){if (_serialPort.BytesToRead >= ReceiveData.Length)break;System.Threading.Thread.Sleep(10);}if (_serialPort.BytesToRead >= ReceiveData.Length){ret = _serialPort.Read(ReceiveData, 0, ReceiveData.Length);}else{ret = _serialPort.Read(ReceiveData, 0, _serialPort.BytesToRead); }ReceiveEventFlag = false; //打开事件return ret;}catch (Exception ex){ReceiveEventFlag = false;throw ex;}}return -1;}#endregion#region 获取串⼝/// <summary>/// 获取所有已连接短信猫设备的串⼝/// <returns></returns>public string[] serialsIsConnected(){List<string> lists = new List<string>();string[] seriallist = getSerials();foreach (string s in seriallist){}return lists.ToArray();}#endregion#region 获取当前全部串⼝资源/// <summary>/// 获得当前电脑上的所有串⼝资源/// </summary>/// <returns></returns>public string[] getSerials(){return SerialPort.GetPortNames();}#endregion#region 字节型转换16/// <summary>/// 把字节型转换成⼗六进制字符串/// </summary>/// <param name="InBytes"></param>/// <returns></returns>public static string ByteToString(byte[] InBytes){string StringOut = "";foreach (byte InByte in InBytes){StringOut = StringOut + String.Format("{0:X2} ", InByte); }return StringOut;}#endregion#region ⼗六进制字符串转字节型/// 把⼗六进制字符串转换成字节型(⽅法1)/// </summary>/// <param name="InString"></param>/// <returns></returns>public static byte[] StringToByte(string InString){string[] ByteStrings;ByteStrings = InString.Split(" ".ToCharArray());byte[] ByteOut;ByteOut = new byte[ByteStrings.Length];for (int i = 0; i <= ByteStrings.Length-1 ; i++){//ByteOut[i] = System.Text.Encoding.ASCII.GetBytes(ByteStrings[i]);ByteOut[i] = Byte.Parse(ByteStrings[i], System.Globalization.NumberStyles.HexNumber); //ByteOut[i] =Convert.ToByte("0x" + ByteStrings[i]);}return ByteOut;}#endregion#region ⼗六进制字符串转字节型/// <summary>/// 字符串转16进制字节数组(⽅法2)/// </summary>/// <param name="hexString"></param>/// <returns></returns>public static byte[] strToToHexByte(string hexString){hexString = hexString.Replace(" ", "");if ((hexString.Length % 2) != 0)hexString += " ";byte[] returnBytes = new byte[hexString.Length / 2];for (int i = 0; i < returnBytes.Length; i++)returnBytes[i] = Convert.ToByte(hexString.Substring(i * 2, 2), 16);return returnBytes;}#endregion#region 字节型转⼗六进制字符串/// <summary>/// 字节数组转16进制字符串/// </summary>/// <param name="bytes"></param>/// <returns></returns>public static string byteToHexStr(byte[] bytes){string returnStr = "";if (bytes != null){for (int i = 0; i < bytes.Length; i++){returnStr += bytes[i].ToString("X2");}}return returnStr;}#endregion}}======================================================================================调⽤⽅法:static SerialClass sc = new SerialClass();static void Main(string[] Args){sc.DataReceived += new SerialClass.SerialPortDataReceiveEventArgs(sc_DataReceived);sc.writeData("at");Console.ReadLine();sc.closePort();}static void sc_DataReceived(object sender, SerialDataReceivedEventArgs e, byte[] bits){Console.WriteLine(Encoding.Default.GetString(bits));}。
c语言串口通信,协议解析写法
c语言串口通信,协议解析写法在C语言中,串口通信通常使用串口库函数进行操作。
常用的串口库函数包括:`open()`: 打开串口设备文件`close()`: 关闭串口设备文件`read()`: 从串口读取数据`write()`: 向串口写入数据`ioctl()`: 对串口进行控制操作在进行串口通信时,需要定义通信协议,包括数据包的格式、数据包的发送和接收方式等。
下面是一个简单的示例,演示如何使用C语言进行串口通信并解析协议:```cinclude <>include <>include <>include <>include <>include <>define SERIAL_PORT "/dev/ttyUSB0" // 串口设备文件路径define BAUD_RATE B9600 // 波特率define PACKET_SIZE 1024 // 数据包大小int main() {int fd; // 串口设备文件描述符struct termios options; // 串口选项结构体char buffer[PACKET_SIZE]; // 数据包缓冲区int bytes_read; // 读取的字节数// 打开串口设备文件fd = open(SERIAL_PORT, O_RDWR O_NOCTTY O_NDELAY); if (fd == -1) {perror("open");exit(1);}// 配置串口选项tcgetattr(fd, &options);cfsetispeed(&options, BAUD_RATE);cfsetospeed(&options, BAUD_RATE);_cflag = (CLOCAL CREAD);_cflag &= ~PARENB; // 无奇偶校验位_cflag &= ~CSTOPB; // 一个停止位_cflag &= ~CSIZE; // 清空数据位掩码_cflag = CS8; // 设置数据位为8位_lflag &= ~(ICANON ECHO ECHOE ISIG); // 非规范模式,禁用回显和中断信号_iflag &= ~(IXON IXOFF IXANY); // 禁用软件流控制_oflag &= ~OPOST; // 不处理输出处理_cc[VMIN] = 1; // 读取至少一个字符_cc[VTIME] = 0; // 不超时tcsetattr(fd, TCSANOW, &options);// 从串口读取数据并解析协议while (1) {bytes_read = read(fd, buffer, PACKET_SIZE);if (bytes_read < 1) {perror("read");exit(1);}// 在这里添加协议解析代码,例如判断数据包的开头和结尾,提取有效数据等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
用c语言实现串口读写程序
一、前言
串口通信是一种常见的通信方式,它可以实现单片机与计算机之间的数据传输。
在嵌入式系统中,使用串口通信可以方便地进行调试和数据传输。
本文将介绍如何使用C语言实现串口读写程序。
二、硬件准备
在进行串口通信之前,需要准备好相应的硬件设备。
一般来说,需要一台计算机和一个串口转USB模块(或者直接使用带有串口接口的计算机)。
同时,在单片机端也需要连接一个串口模块。
三、C语言编程实现
1. 打开串口
在C语言中,可以通过打开文件的方式来打开串口设备。
下面是一个示例代码:
```
#include <stdio.h>
#include <fcntl.h>
#include <termios.h>
int open_serial_port(const char *device_path, int baud_rate) {
int fd;
struct termios options;
fd = open(device_path, O_RDWR | O_NOCTTY | O_NDELAY); if (fd == -1) {
perror("open_serial_port: Unable to open device");
return -1;
}
fcntl(fd, F_SETFL, 0);
tcgetattr(fd, &options);
cfsetispeed(&options, baud_rate);
cfsetospeed(&options, baud_rate);
options.c_cflag |= (CLOCAL | CREAD);
options.c_cflag &= ~PARENB;
options.c_cflag &= ~CSTOPB;
options.c_cflag &= ~CSIZE;
options.c_cflag |= CS8;
options.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG);
options.c_oflag &= ~OPOST;
tcsetattr(fd, TCSANOW, &options);
return fd;
}
```
在上述代码中,open_serial_port函数用来打开串口设备,并设置相应的参数。
其中,device_path参数为串口设备的路径,如
“/dev/ttyUSB0”;baud_rate参数为波特率。
2. 读取数据
在打开串口之后,可以使用read函数来读取串口中的数据。
下面是一个示例代码:
```
#include <unistd.h>
int read_serial_port(int fd, void *data, size_t size)
{
int n;
n = read(fd, data, size);
if (n == -1) {
perror("read_serial_port: Unable to read from device");
return -1;
}
return n;
}
```
在上述代码中,read_serial_port函数用来从串口设备中读取数据。
其中,fd参数为打开的串口设备文件描述符;data参数为存储读取数据的缓冲区;size参数为缓冲区大小。
3. 写入数据
与读取数据类似,在打开串口之后,可以使用write函数来向串口中写入数据。
下面是一个示例代码:
```
#include <unistd.h>
int write_serial_port(int fd, const void *data, size_t size)
{
int n;
n = write(fd, data, size);
if (n == -1) {
perror("write_serial_port: Unable to write to device");
return -1;
}
return n;
}
```
在上述代码中,write_serial_port函数用来向串口设备中写入数据。
其中,fd参数为打开的串口设备文件描述符;data参数为要写入的数据缓冲区;size参数为缓冲区大小。
四、总结
通过上述代码示例,可以实现使用C语言进行串口通信的功能。
在实际应用中,根据具体需求可以进行相应的修改和优化。