优伦EVM2006-2010双路电脑话务员说明书
优伦EVM2006A说明书

挂 转 挂 转 挂 转 ¾ 转总机 0 次:SYS_3_0_[0]
断 总 断 总 断 总 ¾ 下班时段总机:ADM_4_5_[200]
机 机 机 ¾ 上班时段总机:ADM_4_1_[100]
¾ 午休时段总机:ADM_4_3_[300]
挂 转 挂 挂 挂 转 ¾ 转总机 0 次:SYS_3_0_[0]
断 总 断 断 断 总 ¾ 上班时段总机:ADM_4_1_[100] 午休时段总机:
机
机 ADM_4_3_[300]
挂 转 挂 挂 挂 挂 ¾ 转总机 0 次:SYS_3_0_[0]
断 总 断 断 断 断 ¾ 上班时段总机:ADM_4_1_[100]
机
挂 挂 挂 挂 挂 挂 ¾ 转总机 0 次:SYS_3_0_[0]
使用 8 芯复接线复接多个 EVM 可实现以下功能: 1、复制拷贝资料及语音(禁止与旧机种 EVM2X 复制拷贝) 2、上下班切换一次完成 3、共用电源:
每 5 个 EVM 需使用一个 0.5A 的整流变压器 最多 6 个 EVM 可共用一个停电备用蓄电池
13VDC
BATT +-
PROG
MULT
L1 L1
重录请按 2
挂断
或按 3 离开
拨分机号码
忙线或未 按* 应答宣告 未拨号
转原分机 转助理
拨查询码
转总机
按其它数字
挂断
无查询语音 有查询语音
转咨询分机
未再拨号
挂断
查询 宣告 按 0
有咨询分机
转咨询分机
按*重听 按#回上阶
无咨询分机
转总机
拨外语代码
外语模式
拨码错误
空号宣告
**+系统密码
Smart 2006 用户手册(中文)

热值仪概况:图1:Smart 2006 柜内详细元件图:1热电堆(mV 华白指数)输出2热电堆定位螺钉3PT100 温度校正热电阻4PT100 温差校正热电阻5PT100 温差校正热电阻6冷风口差压“-”7冷风口差压“+”8空气差压传感器9点火电极10吹扫孔11燃烧器12点火变送器13点火变送器线性滤波器14风机15风机电源16风机电源线性滤波器17电源端子模块18电源电缆19电缆信号20电缆信号21电缆信号22电缆信号23电缆信号24外部数字量与模拟量输出信号板(D/A板)25点火变送器门安全开关26PT100 箱内温度热电阻27电子内部A/D转换器及电磁阀控制(A/D板)28华白喷嘴差压29华白喷嘴旋钮30精密压力调节器31气体压力变送器32S.G.单元(比重)差压喷嘴33气体压力调节器34S.G比重单元35过程气体电磁阀36标准气体电磁阀37废气手册19页图图2:主门背面内部图1电源2接口3风扇电源4主板5ETX板6风扇ETX板7键盘背面手册20页图3 正面图1电缆信号2电缆信号3电缆信号4电源电缆信号M20 5地电缆信号M166过滤器罩7开关(ON/OFF)8门锁9废气10显示器11模拟信号盖资料21页图4 左视图1电缆信号2电缆电源3电缆信号4电缆信号5电缆信号6USB接口7人机界面接口8快速回路9负载气体(SV.X11/3-4)*10标准气体(SV.X14/3-4)*11标准气体(SV.X14/1-2)12过程气体(SV.X11/1-2)上图显示了标准仪表或配备1到2个标准气体或负载气体的仪表。
具有两个过程气体配件的仪表具有不同的入口,并会标示在仪表上。
带有“*”标记的项目可作为订货配件,标准仪表上不提供。
3.1规格尺寸与重量资料22页图5:外壳尺寸长:1020mm 40.2 inches宽:720mm 28.3 inches厚:337mm 13.2 inches质量:50.5kg 111 lbs防护等级:IP 54 NEMA 12该分析仪提供墙式安装,包含托架。
优伦电脑话务员说明书
" 第 3,5,7 線的振鈴次數同第 1 線,第 4,6,8 線的振鈴次數同第 2 線。 已設定 X,確定請按#,或重新輸入,最多為 9
5 總機㈹碼[0];
6 第2(英)語轉換碼[ ]
7 第3(台)語轉換碼[ ] 8 第4(客)語轉換碼[ ] " 總 機 ㈹ 碼 、 語 言 轉 換 碼 , 輸 入 * 表 示 刪 除 。
2. 施工
參 照 接 線圖,接㆖ 分 機線 及 電源,同時 ㊟ 意迴 路 指示 燈 1,2…都會亮 ㆒㆘ 顯 示 EVM 的迴 路 數,然 後熄 掉 表示 可 正 常動 作。
3. 進入程式
-1 現場:將㆒具「標準按鈕電話單機」接到 EVM 背板 PROG.閘口,拿起話機的聽筒會聽到"歡迎進入系統程式…" -2 遙 控: 由 外線 或 PABX 內 線 撥 ㉃ EVM, 於接 待 語㆗ 按 ** 0# 0# ,會聽 到 "歡 迎進 入系 統 程式 …"。
號碼是 XXXX,確定請按#,或重新輸入,最多 4 位數;0000 表示刪除
SYS_1 " 群 號 必 需 連 續
助理分機請按 3 " 分機號碼多於 4 碼時,請參考第 15 頁。
設定分 機號碼 群及助 理請按 1
請選擇您要的㊠目: 1 等候撥號時 間[03] --初 值 3 秒 2 ㆖班時轉總 機的 等候 應答 時間 [20] 3 ㆘班時轉總 機的 等候 應答 時間 [20] 4 ㆖班時轉分 機的 等候 應答 時間 [20]
連接㉃ PABX: 紅、綠線:第 1 路 黃、黑線:第 2 路
! 規格
語音容量(使用快閃記憶体) 單機介面 電源: 13VDC 電流: 体積:
EVM2020
优伦话务员说明:EVM2006A-2010A

系统功能介绍
产品规格: 回路:双路,可叠加 语音容量:36分钟(EVM2006A),60分钟(EVM2010A) 语音容量:36分钟(EVM2006A),60分钟(EVM2010A) 音频接口:有 查询系统:6 查询系统:6级9段(EVM2006A),6级256段(EVM2010A) 段(EVM2006A),6 256段(EVM2010A) 公共信箱:1 公共信箱:1个 电源:12V/DC, 电源:12V/DC,500MA 体积:25.5cm*15.5cm*3.7cm 体积:25.5cm*15.5cm*3.7cm
自动总机介绍
☉时钟自动切换:内藏时钟可自动切换上班、午休、下班时间,节假日或 自行设定。 ☉预设特定假日:特定节假日(五一、国庆)可预先设定,届时可自动宣 告假日问候语。 ☉助理总机:转接总机忙时,若未改拨其它号码则转助理总机,最多可设 定32部分机为助理总机。 ☉部门助理分机:拨叫部门分机遇忙线或未应答,若未改拨其它分机则转 此部门助理分机。 ☉经理/秘书:拨经理的电话时,可直接将此电话转到其秘书或指定分机。 ☉多个号码:一个分机可拥有多个分机号码。 ☉可设定分机群加码转接,以配合客户需要将来话经由VOIP或另一中继线 再转接至不在同一办公室的其他用户。
查询系统介绍
☉多级多段查询语音:每一查询段落可录制咨询语音或设一个咨询分机号码。 ☉透过语音引导让客户查得所需资料,不必等候人员服务。 ☉内含中、英、粤语之各项宣告语音,用户可改录为四种不同的语言。 ☉可直接录制各段查询的语音,不须再规划信箱的查询流程。 ☉管理者可根据实际需要随时更改查询内容。 ☉在查询中,可直接输入题目号码(题库式),或以树状结构引导来话者选择 查询内容。 ☉查询中可按*重听(可修改)、按#回上一级(可修改)、或按单码至咨询 人员。 ☉同一查询码可依时段不同而播放不同之查询段落 。 ☉可设定查询段落完毕后不拨号转接至咨询分机还是总机 ☉在查询中可按任意键直接返回接待语
优伦电话交换机EU-6000B说明书

程控电话交换机北京优伦电子有限公司EU -6000B第一章 功能特点 主要特点 主要功能第二章 系统配置与结构 系统配置 系统结构第三章 技术指标 技术指标第四章 系统编程 注意事项设置外线打入时响铃分机 设置值班方式 设置来电显示 设置外线状态设置外线呼出分组 设置分机呼出等级设置分机呼出限拨字头 设置特许拨号字头 弹性编码设置分机出局方式 设置分机呼出限时 设置第二出局码 恢复系统出厂设置第六章 使用方法 拨打外线 拨打内线 接入来电 代接电话 转接电话 三方通话 代拨电话 强插和监听 离位转移 外线预约 群 呼 广播功能振铃自检和自报分机号第七章 疑难解释 不能拨打外线 外线不能呼入 不能拨打内线第八章 附 录PC 话务管理系统 系统指令表 使用方法简要 电子保修卡目 录目 录------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------0102030723082526261027112912142915163017311831193221333537223436393640-------------------------------------------------------------------------------------------------------------------------------010607---------------------------417.1.3 呼出/入监控界面:通过本界面可以观察到外线的使用状况.如图二所示,可以观察到801和812分机分别使用外线1和2呼出,而820分机和813分机则在接听5号外线和6号外线的来电. 在号码显示栏中显示的是分机呼出外线的号码。
EPU-M系列说明书
目录第一章序言 (02)第二章产品简介 (05)第三章安装与配线 (09)第四章操作运行 (16)第五章参数与功能码 (19)第六章调试与应用 (46)第七章故障处理与日常维护 (47)序言感谢您采用本公司的高性能通用型交流变频器EPU-M系列。
本手册提供给使用者安装、参数设定、故障诊断、排除及日常维护本变频器相关注意事项。
为了确保能够正确地安装及操作本变频器,请在装机之前详细阅读本使用手册,并妥善保存及交由该机器的使用者。
如对本变频器的使用存在疑难或有特殊要求,请随时联系本公司所在地区办事处或代理商,也可直接与本公司售后服务中心联系。
本手册如有变动,恕不另行通知。
第一章注意事项及产品简介1.1注意事项1.2 EPU-T系列变频器机型大小表2-1 EPU-T系列变频器型号大小1.3 性能指标第二章 安装与配线2.1安装2.1.1 安装方向与空间为了利于变频器散热,要将变频器安装在垂直方向(如图1-1所示),并保证周围的通风空间。
图1-1 安装位置图2.2端子说明变频器的接线端子包括功率端子和控制端子,下面分别对各端子进行说明。
2.2.1功率端子说明50mm大于2.2.2 控制端子说明2.3系统配线2.3.1变频器基本配线图(以单相为图例,三相仅输入电源为380V 区别,其他相同)2.3.2变频器控制回路接线控制回路连线要与功率连线分离,以免引入干扰。
连线较长 的最好选用屏蔽线本机提供的24V 电源用于内部控制,外用时,负载电流不得超过0.2A 。
继电器B与C 是常闭触点,A 与C 是常开触点。
OT1是集电极开路输出。
通过24V 与OT1可以外接继电器。
模拟量调整时,可以通过使用拨动开关来选择不同的调速方式,见下图所示:其中:J2中D 表示端子模拟量调速,M 表示操作面半自带电位器调速;J5中,在J2中选择端子模拟量调速的前提下,V 表示端子输入信号为1-10VDC 的标准电压信号,亦可以是0-5VDC 等非标信号,若为非标信号,则需相应休整模拟量上限值P4.00;A 表示端子输入信号为0-20mA 的标准电流信号,若为4-20mA 信号输入,则需修改你摸量下限参数P4.01,大致为P4.01=1.00;出厂状态:选择端子电压模拟量调速。
优伦话务员设置说明书

话务员设置说明书以下说明书,安装说明,适用于:金伦(kingland) ks-vm24ks-vm48ks-vm11优伦 (EULLAN)ua-101EVM-2006UA-204evm-2006A进入程序现场:将一部「标准按钮电话机」接到话务员背板PROG端口,拿起话机的听筒会听到"欢迎进入系统程序…".遥控:由外线或PABX内线拨至电脑话务员于"接待语"按**0#0#,您将会听到"欢迎进入系统程序…".在"系统程序提示语"按0可进入「管理者程序」.程序设定注意事项:按#回上一阶或数据输入完毕.数据输入有误时不要「按#确定」,等待3秒回目录,再重新选择.分机号码或查询之段落/片语代码不足4码时,可按#完成输入。
安装步骤步骤1:(1)将整流变压器插到市电插座上.(2)将整流变压器的输出接至话务员的"13VDC"电源输入.(3)接上分机线.步骤2:删除旧数据:若电脑话务员曾经被测试或输入数据,请先删除旧数据 SYS_1_00_0,SYS_7_8_1_000.步骤3:自动侦测的条件: (1)分机号码少于5码 (2)转接键后有拨号音 (3)转接键时间大于0.10秒;符合上述条件,您可以从步骤4开始让话务员自动侦测及建立基本数据.步骤4:拨电话至电脑话务员:您会听到"接待语".步骤5:拨一个空闲中的分机号码:正确应有下列反应:1. 话务员播放"请稍候" (Operator建立转接键时间时您会听到"BO…"声).2. 被叫分机响铃(请不要接听电话).3. 约20秒后宣告"分机未应答".步骤6:拨一个忙线中的分机号码:正确应有下列反应:1. 电脑话务员播放"请稍候".2. 数秒后话务员宣告"忙线中".步骤7:拨一个不存在的分机号码:正确应有下列反应:1. 话务员播放"请稍候".2. 数秒后宣告"您所拨的号码是空号"步骤8,重复3次步骤5~7如果反应都正确,则电脑话务员已经建立了基本数据,包括:(1)转接键时间 (2)忙音周期参数 (3)回铃音周期参数 (4)空号音周期参数 (5)分机号码群第01群的分机号码范围步骤9,输入下列数据:1. 系统时间及上班时间2. 录制公司接待语3. 总机人员的号码步骤 10,设定程控交换机程序1. 设定外线响铃至话务员.2. 如果PABX有送出识别码的功能,您可以使用识别码让电脑话务员不必监视应答也可以作未应答宣告.若要重新装机,下列程序可方便您删除旧数据:SYS_1_00_0 系统程序的数据全部恢复初值,并删除全部的总机号码及预设之假日.SYS_7_8_1_000 重新自动建立回铃音/忙音/转接键的资料.ADM_2_1_00 (语音后) _0 删除全部的自录接待语.ADM_2_9_0000 (语音后) _0 删除全部的查询语音.ADM_5_0000_0000 删除全部的号码跟随.ADM_6_0000_0000 删除全部的咨询分机.ADM_8_0000_000 删除全部的分机信箱.空号音周期参数 (5)分机号码群第01群的分机号码范围(您最好针对现况再作修改)录制语音所有语音的录制,试听,删除,都在管理者目录引导语中按2 选择修改语音,然后依语音引导选择您所要的项目.例1,录制国语的上班接待语,步骤如下:按1选择国语→ 按片语代码01 → 按2选择录音→ 听到"哔"声→ 对着话筒录音→ 按#结束.例2,录制英语的上班接待语,步骤如下:按2选择英语→ 按片语代码01 →按2选择录音→ 听到"哔"声→ 对着话筒录音→ 按#结束.另外也要设定第2(英)语转换码SYS_3_6_[X],来话者在国语接待语中按X才会听到这段录音.更改语音,只要再次录音,不必先删除旧语音.若删除自录语音,话务员仍会以内藏语音宣告.第2语言的内藏语音为英语,第3语言的内藏语音为台语,第4语言的内藏语音为客家话.也可以改录成其它语言.具体程式项目,请参考以下图片:)手动切换上下班自动切换上下班录制语音•更改语音,只要再次录音,不必先删除旧语音。
[VIP专享]优伦话务员设置说明书
![[VIP专享]优伦话务员设置说明书](https://img.taocdn.com/s3/m/f2011e4a7f1922791688e8ab.png)
话务员设置说明书
以下说明书,安装说明,适用于:金伦 (kingland) ks-vm24 ks-vm48 ks-vm11 优伦 (EULLAN) ua101 EVM-2006 UA-204 evm-2006A
进入程序 现场:将一部「标准按钮电话机」接到话务员背板 PROG 端口,拿起话机的听筒会听到"欢迎进入系统
2006年经省农业厅,南平市政府19批41准年,毛南泽平东农在校《与改建造阳我农们业的工学程习学》校一合文署中办,学把,这强句强原联指合治,学实态行度一的套话班古子为,今两用个,校从区哲的学管的理高体度制做,了从新而的使分学析校,的深办化学了规对模实,事办求学是实的力理都解有,长并足为的其发提历展出史,了的逐一经步个验发经教展典训成的告为注诉有释我着,们广指:泛出什发:么展“时空‘候间实坚和事持良’实好就事发是求展客是前观,景存党的在和闽着国北的家唯一的一切事一事业所物就集,会文第‘顺理一是利、个’发农问就展工题是;商,部实个向待联事老全我系求话国们,是题招的即,,生学规党实和校律和事就。性国求业职,家是的业‘的一,教求事一语办育’业、,学明就就实出规显是会事自模不我遭求东最同们遇是汉大于去挫地班、高研折看固师等究。待所资教”同学著力育。时校《量和毛,、汉最中泽只学书雄学东有生河厚教对坚和间、育中持学献办,国实校王学不社事当传质同会求前》量点、是工。和就中,作书办在国党以中学于革和及称声职命人存赞誉业的民在刘高教分的的德的育析事问“综所无业题修合有不才学性工贯能好国作穿顺古家和着利,级任实前实重何事进事点事求,求中情是一是专都的旦。和必精背”省须神离其级靠。实意文自因事思明己而求是学完他是根校成才就据。。能必实而找然事这到遭求些中到索成国挫真绩革折理的命甚。取的至得规倒是律退得,。益制实于定事学出求校适是党合是政中马领国克导国思的情主坚的义强路世领线界导方观,针的得政根益策本于,要全指求体导,党中是员国马干革克部命思和走主教向义职胜的工利精的,髓辛实。勤事工求作是和是共中同国努革力命的实结践果经,验但的最高主度要总的结一和条概是括得,益中于国学革校命始和终建坚设持的实经事验求表是明的,原实则事,求可是以是说胜,利坚之持本实,事只求要是坚原持则实是事我求们是学,校我各们项党事就业会健永康远、立稳于定不和败谐之发地展。的重要保证。
优伦电脑话务员故障资料

Q1.呼入EVM时,EVM却不应答A:1.电源未接好:检查电源指示灯是否亮,确保电源适配器连接正确及电源输入是 13V2.EVM端口故障或外线未到EVM响铃,拆去EVM,接上话机,测试拨入该端口是否能够振铃3.检查是否设置了EVM延迟启动.(SYS_31&SYS_32)A:1.检查等候拨号时间(SYS_2_1)是否被设为02.检查系统程式SYS_3_0中是否为03.EVM管理者编程中ADM_4_1是否是空的A:监视应答情况下,由于OFF周期较长,应答扫描周期会使通话延时,可设定不监视应答SYS_2_2_[00]~~SYS_2_5[00] .ADM_5_9907_[指定代接功能码]A:1.忙线(未应答)取回外线方式不正确,改接普通话机测试忙线(未应答)取回的方式,填入SYS_5_5(6)2.忙线(未应答)信号音参数检测不正确,检查SYS_7_5(6)_1~~SYS_7_5(6)_43.忙线(未应答)宣告未录音,检查ADM_2_1_07(06) &ADM_2_1_13(12)A:1.进入系统程式,按“7”,再按“6”,如果听到“嘀”声,则系统未退出自动侦测模式,如果无“嘀”声,表示自动侦测已完成2.回铃音周期与忙音周期有确定值A:1.PBX忙音周期及回铃音周期不在300Hz~~640Hz频率范围内,设定SYS_4_8_[2],重新自动侦测2.PBX的忙音及回铃音周期误差比较大,设定SYS_4_6_[1],容许较大误差A:1.检查系统程式SYS_1,该分机不在分机号码群中2.检查是否设置了错误的号码跟随: ADM_5_XXXX_YYYY. (YYYY是9000或不在号码群中)A:1.如果来话者未听到保留音乐,在EVM拍叉簧几声后播放:“对不起,电话将被挂断,再见”,则EVM 转接键时间的设置小于PBX的转接键时间,将SYS_7_1时间加长2.主叫未听保留音乐,电话立即被挂断,则EVM转接键时间大于PBX转接键时间,缩小SYS_7_1时间3.将EVM端口改接话机,测试用HOOK FLASH能否保留呼叫A:1.检查该分机是否被转移至其它分机(PBX侧及EVM侧)2.EVM转接方式与PBX的转接方式不同Q10.按单码是否可以转至多个内线分机,如多个人工座席A:可以。
优伦EVM2006A说明书
L2
L2
LINE PORT
13VDC
BATT +-
PROG
MULT
L1 L1
L2
L2
LINE PORT
13VDC
BATT +-
PROG
MULT
L1 L1
L2
L2
LINE PORT
13VDC
BATT +-
PROG
MULT
L1 L1
L2
L2
LINE PORT
13VDC
BATT +-
PROG
MULT
L1 L1
慧模式侦测信号音 ¾ ADM_4_1_[39999]:上班时段的总机号码
6、 设置总机号码:需要总机服务的来话者可以拨总机代码或不拨号等待总机服务。
各时段的总机服务的转接目标分机的设定如下:
SYS_3_5_[0]设置总机代码 ADM_4_[X]_[F~] X: 1~8= 指定时段。 F~: 设置指定总机服务的分机号码 设置 9999 表示公共信箱 设置*001~*008 表示参考分机寻线群*001~*008 (参考 P8 分机寻线群设置) 不提供总机服务的时段不必指定总机服务的转接目标分机,在接待语宣告后来话者逾时 未拨号 EVM 就挂断电话; 只对拨总机代码的来话者提供总机服务,可设定转总机次数 SYS_3_0_[0](进线未拨号, 再宣告仍不拨号就挂断); 对不拨号的来话者在上班时段要提供总机服务而下班时段不要,则夜间总机不 设,夜间拨总机可用号码跟随。 ADM_5_[N~]_[F~]指定值班人员, N~与总机代码 SYS_3_5 相同。
使用 8 芯复接线复接多个 EVM 可实现以下功能: 1、复制拷贝资料及语音(禁止与旧机种 EVM2X 复制拷贝) 2、上下班切换一次完成 3、共用电源:
优伦语音信箱8100说明书

目录1、动作流程图--------------------------------------------------- 12、安装说明接线图----------------------------------------------------- 3 安装步骤--------------------------------------------------- 6 3、语音引导程序设定系统程序----------------------------------------------------- 9 管理者程序-------------------------------------------------- 11 语音信箱使用者程序------------------------------------------- 13 4、程序说明及范例录制语音----------------------------------------------------- 15 分机号码群-------------------------------------------------- 18 总机号码---------------------------------------------------- 19 识别码------------------------------------------------------- 20 留言通知---------------------------------------------------- 22 查询系统----------------------------------------------------- 24 其它功能---------------------------------------------------- 26 5、附录问题排除 ----------------------------------------------------- 29 PABX配合资料------------------------------------------------ 31用户数据表 --------------------------------------------------- 32动作流程图2接线图—EVM8100A/8200A/8400AEVM8100A EVM8200A EVM8400A 语音容量 105~140小时 210~280小时 420~560小时 模拟端口 4路,可扩充至8路个人信箱数 511个电源/电流 13VDC/1000mA体积 26.5cm(长)×19cm(宽)×5cm(高);41cm(长)×27.5cm(宽)×5cm(高)现场:将一部标准按钮电话机接到EVM背板「PROG」端口,拿起话机的听筒会听到“欢迎进入系统程序…”。
E2010电子单元说明书

MANUALE2010 ELECTRONIC UNIT FOR ZIROX- PROBESPower supply: 24 V DCTable of contents1General information 31.1How to use this manual 31.2Copyright 31.3Commonly used symbols 3 2Safety instructions 5 3Application and technical data 63.1Application 63.2Technical data 6 4Composition 84.1Front, keys 84.2Rear, connections 9 5Installation and initiation 115.1Installation 115.2Reference air supply for ZIROX® probes 115.3Waiting for operating state 11 6Parametrization 126.1Menu operation – an example 126.2Display 126.3Adjustable parameters 136.4Offset calibration 146.5Span gas calibration 146.6Reset calibration 146.7Error messages during calibration 146.8Menu navigation of calibration (diagram) 15 7Maintenance 167.1General information 167.2Calibration 167.3Error indication 167.4Storage 16 8Warranty 17 9Declaration of conformity 181 General information1.1 How to use this manualThis manual describes composition, mode of operation and use of the ELECTRONIC UNIT E2010 of the ZIROX GmbH.Proper operation of the E2010 can only be ensured if the contents of this manual are known. Therefore, all chapters of this manual must be read carefully prior to operating the E2010.The values on the device display in this manual are examples or preset parameters of the manufacturer. Process-specific parameters must be set by the user.Pages, charts and figures are numbered consecutively.1.2 CopyrightThis operation manual is copyright protected.It must not be partially or completely reproduced, copied, or distributed, without prior written permission of the manufacturer. The use for competitive advantages or the distribution to third parties are not authorized either. All rights reserved.1.3 Commonly used symbols Symbol for imminent danger:This symbol refers to imminent danger to persons’ life and health.In case of disregard fatal injuries may result.Symbol for indirect danger:This symbol indicates indirect danger.The degree of the damage depends on the circumstances and the actions of the persons involved.In case of disregard destruction or damage of the E2010, its single components or other material assets as well as minor injuries may result.dangerattentionSymbol for proper handling:This symbol appears where the manual refers to the adherence torules, instructions and proper operation.NoteIn case of disregard, damage or destruction of the E2010 or its singlecomponents may result.2 Safety instructionsThe following regulations for industrial safety provide basic informationabout potential danger during the operation of the E2010. Therefore, theymust be observed and strictly followed by the responsible staff.• A failure-free and functional operating of the E2010 can only beguaranteed with knowledge of this manual. Therefore, all chaptersof this manual must be read carefully before the installation andinitiation of the E2010.attention•The E2010 is to be used for the functional operation only (seechapter 3.1).•The E2010 may only be installed, operated, and maintained bytrained staff.•Special safety instructions for potential danger during certainworking processes are given in relevant text passages.3 Application and technical data3.1 ApplicationThe electronic unit E2010, developed for panel mounting, provides the power supply for ZIROX® sensors, evaluates signals and displays measuring results in the form of a standard signal (4-20 mA) for process control.The electronics realizes the following functions:•Power supply and control of sensor heating•Processing of the thermoelectric and cell voltage of the probe to the oxygen concentration•Output of the oxygen concentration as a standard signal•Calibration•Reference air supply by internal pump (option)3.2 Technical dataPower supply ........................................ 24 V DC +/- 10%Power consumption ............................. 2 W + sensor heating power Fuse ..................................................... 2.5 A resettingProtection degree ................................. IP 30 (Front IP52)Working temperature ............................ 0...40 °CStorage temperature ............................. 0...50°CSet temperature .................................... 700 °C (depends onconnected sensor)Display ................................................ Double-spaced LCD-display, 2 x 16 digitsInput signal ........................................... Sensor and thermoelectricvoltage (+/- 1500 mV, polarityadjustable), thermocouple typeB (400 – 1500 °C) or thermo-couple type K (0 – 1000°C)Output signal ....................................... 4...20 mA (0…10 V option)Dimensions W x H x D .......................... 96 mm x 96 mm x 125 mm Weight .................................................. Approx. 650 gKeypad ................................................ 2 keys (membrane keypad) Alarm indication ................................... Current output goes to 0 mA Interface (option) .................................. RS2324 Composition4.1 Front, keysThe display and the keys for parametrization are located on the front.Menu key: scroll or select the requested parameterENTER key: activate or enter adjusted parameter (save change)Fig. 1: Front view E2010 with keys and display4.2 Rear, connectionsAll connections and outputs are located on the rear.Fig. 2: Rear view E2010 with connections Terminal strip X1Terminal strip X2Sensor connections Power supply/output signalDigital output:………… RS 232-Interface (9600 Baud)Pin assignment RS 232The RS232 interface must be connected with a computer by SUB-D-cable (9pol., 1:1, uncrossed)!Transfer rate: max. 9600 Baud, adjustablePin Description cable 1 AINCOMbrown 2 Vz white 3 Vt blue 4 Heating+ black 5Heating-greyPin Description 1 +24V DC 2 GND 3 OUT + 4OUT -Stop bits 1 Parity no Data bits8HandshakewithoutProtocol of the serial interface (CR = carriage return)Set Feedback signal(example)Transferred measuringvalueParameterM2CR M2x.xxExxCRM22.06E+052.06*105 ppm O2Oxygen concentration inppmA1CR A1xxx.xCRA120.920.9 mV Cell voltage in mVA2CR A2xxx.xCRA2749.9749.9 °CMeasuring temperature in°CThe parameters are set by software.Additional PC-software for display and storage of the measuring values is available on request.Error messagesERROR0 Transfer error RS232 (or wrong command)ERROR1 Warm-up (Cell temperature too low, < 30 min)ERROR2 Cell temperature too low (< Set temp. – 10 °C, > 30 min) ERROR3 Thermocouple brokenERROR6 System errorElectronic unit E2010 Installation5 Installation and initiation5.1 InstallationThe clamps on the rear must be connected with the sensor clamps (s.chapter 4.2).The power supply is 24 V DC.5.2 Reference air supply for ZIROX® probesReference air input of the sensor and the reference air output of the E2010must be connected by a flexible hose (inner diameter 3 mm). The referenceair flow is preset by the manufacturer.After starting the system (E2010 with connected sensor) the reference airflow must be checked by an inserted flow meter (5 - 10 l/h resp. approx.100 - 200ml/min).5.3 Waiting for operating stateDepending on the connected sensor, the E2010 needs a certain period of Notetime until the operating state is reached (for further information seetechnical data of sensor). Because of thermal balancing effects, the sensorneeds approx. 60 minutes until the ultimate operating state after reachingthe operating temperature.The keys are locked before reaching the operating state!6 Parametrization6.1 Menu operation – an exampleAfter switch-on the warm-up starts. From 400 °C on the current temperature is displayed in the second line. After reaching the working temperature the oxygen concentration is displayed in the first line.By pressing several values can be displayed in the second line. (see chapter 6.2).With help of both keys an offset-calibration (…zero point calibration“) in clean air and a span gas calibration is possible. The complete menu is shown schematically in figure 3, p. 17.The sensor can be very hot for a while after switch-off and during operation. CAUTION – VERY HOT – DO NOT TOUCH!6.2 DisplayE2010 Start display, approx.3secVersion 2.4.6 Software versionE2010 Start display, approx.3sec THERMOCO. TYP B Thermocouple typeWARM-UP Warm-up of the ZIROX-SensorTemp: 450 °CO2: 20.64 Vol%Temp: 700 °CO2: 20.64 Vol%Vz: -2 mVO2: 20.64 Vol%SETTINGSO2: 20.64 Vol%CALIB.ZERO POINTO2: 20.64 Vol%CALIB. SPAN GAS6.3 Adjustable parametersThe following parameters are adjustable in the menu SETTINGS.OUTPUT VALUE Valid for display and analog output!Vol % O2 V ol ppm O2, mbar O2, atm O2, Vz [mV]OUTPUT VALUElog[10] linear (for Vz linear only)OUTPUT 4 - 20 mA Current outputZERO: 400 ppm Zero point 400 ppm corresponds to 4 mAOUTPUT 4 – 20 mASPAN: 206400 ppm Terminal value 206400 ppm corresponds to20 mARETURN ?NO YESSAVE VALUES ?NO YES6.4 Offset calibrationThe E2010 has a calibration function. Based on that function the zero point Notecalibration and, if requested, the span gas calibration can be conducted(see figure 3, p. 17). The zero point calibration must be conducted in cleanair.6.5 Span gas calibrationAfter calling the SPAN GAS concentration in the calibration menu (seefigure 3, p. 17), the setting options are activated by pressing the enter key.The flashing digit can be set by pressing the menu key. After changing allthe digits, this menu is deactivated by ENTER and left by the menu key.Now the calibration can be started.6.6 Reset calibrationIf in the main menu CALIB.ZERO POINT or CALIB. SPAN GAS isdisplayed and both keys are pressed for 3 seconds, RESET CAL.ZERO?and RESET CAL.SPAN respectively will be displayed.By pressing ENTER the calibration values will be reset to 0 resp. 1.6.7 Error messages during calibrationCALIBR. FAILEDOUT OF RANGE //limits: ±50mV resp.. ±50% of VzCALIBR. FAILED* TIMEOUT * //no steady measuring value in 20sec.6.8 Menu navigation of calibration (diagram)Fig. 3: Chart offset and span gas calibrationElectronic unit E2010 Maintenance7 Maintenance7.1 General informationZirox sensors and probes with thermocouple type B are calibration- andmaintenance-free. Only special products with thermocouple type K (e.g.oxygen probe SS51 for measurements in flue gases) must be calibratedperiodically.7.2 CalibrationDepending on the sensor type, a regular zero point calibration and (if sensorwith thermocouple type K) a span gas calibration is necessary (see chapter6). The corresponding frequency is outlined in the technical data of thesensor.7.3 Error indicationDuring operation the sensor is permanently monitored and typical errorsidentified.The following error messages can appear:WARM UPTEMP: 543 °CLOW PROBE TEMP.TEMP: 688 °C < T set (e.g. 700 °C) - 10°C+++ ERROR +++THERMOCOUPLE Thermocouple broken+++ ERROR +++COLD JUNCTION Only thermocouple Typ K7.4 StorageThe device must be stored in a dry and dust-free room at 0…50 °C. Pleaseuse the original packing!Electronic unit E2010 Warranty8 WarrantyZIROX Sensoren & Elektronik GmbH warrants that the productsmanufactured and sold are free from manufacturing and material defects atthe time of dispatch. In case of defects and faults within 12 months (probe)and 24 months (electronics assembly) respectively after dispatch, ZIROXwill clear faults at its own option by repair or replacement. The purchasermust give prompt written notice to ZIROX. The purchaser is not entitled toclaim other legal remedies based on this warranty.ZIROX does not warrant supplied products which are subject to normalwear and tear (e.g. reference gas pump).Corrosive gases and solid particles may cause damage and require repairor replacement due to normal wear and tear.The contact of the products with explosive gas compounds, halogens inhigh concentrations and sulphuric gases (e.g. SO2) is not permitted.The contact of the products with siliconic or phosphoric compounds is notpermitted either.A connection of ZIROX and non-ZIROX products voids any warrantyclaims.Warranty and warranty claims are only accepted if they are in accordancewith the "General Sales and Delivery Conditions" of the manufacturer.Warranty and liability claims for damage to persons and/or property arevoid if they are subject to the following:• Normal wear and tear• Improper use of the product• Disregard of the manual’s instructions• Improper installation, initiation, operation and maintenance ofthe product• Operation of the product without protective measures• Unauthorized functional and technical modification of theproduct• Dismantling of parts as well as installation of spare parts oradditional units which are not delivered or permitted by themanufacturer• Improper repairs or faulty operation•External impact•Acts of GodAttention: When installing the equipment, the customer must ensure thatall necessary supply lines are connected and the operating temperature ofthe probe is reached. Experience has shown that products installed but notin use may be damaged by the process or by external influence. ZIROX willnot accept any responsibility for such damage..Electronic unit E2010 Declaration of conformity9 Declaration of conformity。
[VIP专享]优伦话务员设置说明书
2. 数秒后宣告"您所拨的号码是空号" 步骤 8,重复 3 次步骤 5~7
如果反应都正确,则电脑话务员已经建立了基本数据,包括:(1)转接键时间 (2)忙音周 期参数 (3)回铃音周期参数 (4)空号音周期参数 (5)分机号码群第 01 群的分机号码范围 步骤 9,输入下列数据: 1. 系统时间及上班时间 2. 录制公司接待语 3. 总机人员的号码 步骤 10,设定程控交换机程序 1. 设定外线响铃至话务员.
ADM_8_0000_000 删除全部的分机信箱.空号音周期参数 (5)分机号码群第 01 群的分机号码范 围(您最好针对现况再作修改)
录制语音 所有语音的录制,试听,删除,都在管理者目录引导语中按 2 选择修改语音,然后依语音引导选 择您所要的项目. 例 1,录制国语的上班接待语,步骤如下: 按 1 选择国语→ 按片语代码 01 → 按 2 选择录音 → 听到"哔"声 → 对着话筒录音 → 按#结束. 例 2,录制英语的上班接待语,步骤如下: 按 2 选择英语→ 按片语代码 01 → 按 2 选择录音 → 听到"哔"声 → 对着话筒录音 → 按#结束. 另外也要设定第 2(英)语转换码 SYS_3_6_[X],来话者在国语接待语中按 X 才会听到这 段录音.更改语音,只要再次录音,不必先删除旧语音.若删除自录语音,话务员仍会以内藏语音宣告.第 2 语 言的内藏语音为英语,第 3 语言的内藏语音为台语,第 4 语言的内藏语音为客家话.也可以改录成其它语言. 具体程式项目,请参考以下图片 :)
步骤 1:(1)将整流变压器插到市电插座上.(2)将整流变压器的输出接至话务员的"13VDC"电源 输入.(3)接上分机线.
领域电脑话务员lwop6000说明书

LW-OP6000双路电脑话务员说明书目录1、2、3、4、5、6、7、8、1、2、3、一、动态流程图二、线路连接:拨 “999”听留言 输入正确密码还有留言?播放一条留言“#”键或结束结束?谢谢使用,再见挂断重听1下一条2 删除3,全删4 “#”键结束试听播放否是是否“#”拨 “**0”检测信号音三、指示灯说明:1、L INE1:第一路工作指示灯2、L INE2:第二路工作指示灯3、S TATUS:运行状态指示灯4、P OWER:电源指示灯领域LW-OP6000能够通过电脑和两种方式设置参数四、话机模式设置(参数的远程设置):一、概述:连接分机线到LW-OP6000的LINE一、LINE2端口,接上电源(DC9V)设备自动开机,POWER指示灯亮起并听到“嘀”的一声,设备启动成功。
拨打连接话务员LINE1或LINE2的分机号码,听到欢迎词后输入“*900”进入设置程序(默许密码为123456),设备将提示“请输入编码”。
编码为3位,其对应的参数或意义见“表3-1”。
每一个编码均对应一个参数,由表中查到您需要更改的参数对应的编码,听到语音提示“输入编码后”,输入3位编码,(假设输入错误解听到语音提示“编码无效”,然后从头提示“请输入编码”),系统语音重复一遍您刚输入的编码并当即报出此编码对应参数当前的设定值,接着提示输入“请输入您的设定值”,输入新的设定值后按“#键”终止,(若是不想修改,直接按“#键”,若是已经输入足够的位数,系统会自动同意,不需要再输入“#键”),语音重复您刚输入的参数数字。
若是无误那么会听到提示“设置有效”,若是有误那么会听到提示“设置无效”,不管是不是有误都会再回到“请输入编码”的提示处。
输入编码“000”设置终止保留,系统从头启动,注意必需输入“000”退出设置程序,不然参数不予保留。
进入和终止设置治理程序,都会听到电脑话务员的蜂鸣器“嘀”的一声提示。
二、号码群设置(建议对此项进行设置,设置后将提高LW-OP6000的转接速度):输入编码“110”设置分机号码群“1”的开始号码(能够是公司用的分机号码群的最小分机号码),按#终止,输入“111”设置群“1”的终止号码(要比公司用的分机号码群的最大号码大1,但要维持与开始号码的长度一致。
SERDESUB-16OVT EVM用户指南SNLU108 - 2012年7月说明书

User’s GuideSNLU108 – July 2012SERDESUB-16OVT EVM User’s GuideTABLE OF CONTENTSTABLE OF CONTENTS (1)1.DESCRIPTION (2)2.KIT CONTENTS (3)3.SYSTEM REQUIREMENTS (3)4.SETUP INSTRUCTIONS (4)5.BLOCK DIAGRAMS (5)6.OPERATION (6)7.BOM (BILL OF MATERIALS) (8)8.APPENDIX (10)Serializer and Deserializer PCB Schematics (10)2 SERDESUB-16OVT EVM User’s Guide SNLU108 – July 2012 1. DESCRIPTIONThe SERDESUB-16OVT is an evaluation kit designed to demonstrate performance and capabilities of the DS90UB901Q and DS90UB902Q FPD-Link III Serializer/Deserializer Chipset for use with the OmniVision sensors. This serves as an add-on to theOmniVision development systems by providing a serialized digital interface between camera and controller. The chipset enables transmission of a high-speed video data along with a low latency bi-directional control bus simultaneously over a single twisted pair cable. The bidirectional control channel of the DS90UB901Q/902Q provides seamless communication between the camera and Host Controller.The Serializer board provides LVCMOS inputs and a bidirectional control channel (I 2C compatible) from the Image Sensor and is converted to a FPD-Link III LVDS data pair on the DS90UB901Q Tx board. The DS90UB902Q Rx board receives the FPD-Link III LVDS serialized data stream and converts it back into parallel LVCMOS signals and clock together with the bidirectional control channel (I 2C). The Host Controllerprocesses the video data from the image sensor and shows it on a display.This manual is intended for developers who want a convenient way to begin system development. It is assumed that the reader has a basic understanding of digital video and still capturing concepts.Description2. KIT CONTENTSo One SERDESUB-16OVT Serializer Board with the DS90UB901Qo One SERDESUB-16OVT Deserializer Board with the DS90UB902Q3. SYSTEM REQUIREMENTSThe following items are required in order to use the SERDESUB-16OVT EVM kit:o OmniVision camera sensor module− OV10620, OV7710, OV9715o Host Controller with I 2C interface bus (I 2C master)− FPGA, Electronic Control Unit (ECU), Video Processor, Microcontroller− Slave clock stretching must be supported by the I 2C master controllero CAT6 cable o External +5VDC 1A Power SupplyFigure 1: Imager Sensor – Serializer and Deserializer Board ConnectionsOVT SensorSER DES +5VDCKit Contents4 SERDESUB-16OVT EVM User’s Guide SNLU108 – July 2012 4. SETUP INSTRUCTIONS1. Connect the DS90UB901Q Serializer board to the Omnivision module via the J132-pin header (16 x 2 x 0.1"). Ensure that the camera module and the Serializer board are connected properly by matching the ground (GND) pins.2. Connect the DS90UB902Q Deserializer board to the Host Controller.3. Connect the DS90UB901Q Serializer board to the DS90UB902Q Deserializerboard via CAT6 cable on the RJ45 connectors.4. Apply 5V power supply to the Deserializer board J10 power jack.5. Push “ON” button (S4) on Deserializer board. Green light should now be visibleon RJ45 connectors at Serializer (J4) board and Deserializer (J7) board toindicate power is applied to the boards.6. Initialize the Deserializer. Refer to the DS90UB901Q/902Q datasheet for startupprocedure and the definition of each register.7. Verify that LOCK LED on D5 and the RJ45 orange lights are lit. This indicates thechipset is Locked and ready to begin I 2C communication with the image sensor.8. Initialize the OmniVision image sensor. Refer to the appropriate sensordatasheet for specific information.9. Start video capture (or alternate control application).Setup Instructions5. BLOCK DIAGRAMSFigure 2. Serializer Board Block Diagram12V 5V T o P r o c e s s o rFigure 3. Deserializer Board Block Diagram Block Diagrams6 SERDESUB-16OVT EVM User’s Guide SNLU108 – July 2012 6. OPERATIONThis section describes how to I 2C instructions between Host and image sensor through the DS90UB902Q and DS90UB901Q pair function in a camera system application. Figure 4 shows the configuration of evaluation boards for I 2C communication with a Host controller. Note a Host controller requires an I 2C interface with slave clock stretching support.In Camera mode, I 2C transactions originate from the Master controller at theDeserializer side (Figure 4). The I 2C slave core in the Deserializer will detect if a transaction is intended for the Serializer or the camera sensor (slave device) at the Serializer. Commands are sent over the bidirectional control channel to initiate the transactions. The Serializer will receive the command and generate an I 2C transaction on its local I 2C bus. At the same time, the Serializer will capture the response on the I 2C bus and return the response on the high speed forward channel. The Deserializer parses the response and passes the appropriate response onto the Deserializer I 2Cbus.Figure 4. Typical System Block DiagramOperationTROUBLESHOOTING CHARTProblem… Solution…No image Check that RJ45 green lights are onNo green light on RJ45 connectors Check that 5V power supply is applied, and CAT cable connection is goodCycle “ON” button on DeserializerboardAll lights on, but no image Check that orientation of boardconnections is correctNo image Check that lens cap is removed fromcameraPower, ground, input data and input clock are connected correctly, but no outputs. Check the Power Down pins of both Serializer and Deserializer boards to make sure that the devices are enabled (PDB=Vdd) for operation.Operation8 SERDESUB-16OVT EVM User’s Guide SNLU108 – July 2012 7. BOM (BILL OF MATERIALS)Item Quantity Reference Part PCB Footprint______________________________________________________________________________________1 1 C1 5pF_open CAP_HDC_06032 1 C2 5pF_open CAP_HDC_06033 5 C3,C4,C5,C28,C29 0.1uF CAP_HDC_060342 C6,C30 10uF CAP_HDC_0603 5 3 C7,C35,C52 1uF CAP_HDC_06036 9 C8,C16,C18,C57,C59,C70, 10uF CAP_HDC_1206C72,C73,C757 1 C9 10uF CAP_HDC_12068 14 C10,C11,C13,C19,C20,C22, 0.01uF CAP_HDC_0603C24,C31,C32,C36,C38,C43,C47,C609 25 C12,C14,C15,C17,C21,C23, 0.1uF CAP_HDC_0603C25,C33,C37,C39,C44,C45,C46,C48,C51,C53,C55,C56,C58,C61,C63,C64,C69,C71,C7410 2 C26,C27 100pF CAP_HDC_060311 1 C34 22uF 80512 1 C40 22uF Radial_Surface_Mount13 1 C41 0.1uF CAP_060314 1 C42 1uF CAP_HDC_080515 1 C49 100uF 3216_12_EIA_120616 1 C50 0.01uF CAP_HDC_060317 2 C54,C62 10uF CAP_HDC_080518 4 C65,C66,C67,C68 4.7uF CAP_HDC_080519 1 D1 Green_LED,0603 60320 1 D2 DIODE SCHOTTKY SC_90_SOD_323F21 2 D3,D4 DIODE SCHOTTKY S_Mini_2P22 1 D5 Orange_LED,0603 60323 1 J1 HEADER 16X2 Through_Hole_Right_Angle242 J2,J6 IDC1X3 Header_1X3P 25 1 J3 2x3-Pin Header Header_2X3P26 2 J4,J7 RJ45 RJ45_LED27 1 J5 HEADER 16X2 hdr_100mil_16X228 3 J8,J9,J11 CON2 CON229 1 J10 CONN JACK PWR 3_terminal_thru_hole_power_jack 30 1 L1 39uH Surface_Mount_31 1 L2 100uH 100uH32 11 L3,L4,L5,L6,L7,L8,L9,L10, FB 1000 Ohm,0402 RES_HDC-0402L11,L12,L1333 1 P1 HSD_2X2_open CON_HSD-4P_134 1 P2 HSD_2X2_open CON_HSD-4P35 2 Q1,Q2 MN1382N SC_7536 1 Q3 PMOSFET PMOSFETBill of MaterialsBill of Materials Item Quantity Reference Part PCB Footprint______________________________________________________________________________________37 9 R1,R10,R12,R15,R32,R33, 10K RES_0603R35,R37,R4638 4 R2,R3,R19,R29 4.7K RES_060339 6 R4,R18,R20,R28,R31,R41 220 ohm RES_060340 9 R5,R7,R8,R9,R23,R24,R25, 33 ohm RES_0603R26,R2741 1 R6 33 ohm RES_060342 5 R11,R13,R34,R36,R38 1.0K RES_060343 1 R14 1K RES_060344 2 R16,R17 33 ohm_open RES_060345 2 R21,R22 1.8K RES_060346 2 R30,R54 75 ohm,0603 RES_060347 1 R39 0 Ohm RES_HDC_060348 1 R40 1.0K_open RES_060349 1 R42 0ohm RES_HDC_060350 1 R43 976_open RES_HDC_060351 1 R44 10K RES_HDC_040252 1 R45 470K RES_HDC_06053 2 R47,R51 9.31K RES_HDC_060354 2 R48,R52 5.62K RES_HDC_060355 2 R49,R53 51K RES_HDC_060356 1 R50 0ohm_open RES_HDC_060357 2 R58,R59 0 ohm_open RES_040258 1 S1 SW DIP-2 Surface_Mount59 2 S2,S4 SW PUSHBUTTON SPST_NO60 1 S3 SW DIP-4 CT2184LPST61 1 U1 DS90UB901Q 32ld_LLP62 1 U2 ATtiny25 8_SOIC63 2 U3,U7 MN1382N, 3.4-3.7V Mini_3P64 1 U4 LP2992AIM5-3.3 SOT_23_565 2 U5,U11 LP2992AIM5-1.8 SOT_23_566 1 U6 DS90UB902Q 40ld_LLP67 1 U8 LM22671MRE-5.0 8_PSOP68 1 U9 NC7SZ14/SOT23 SC70_569 1 U10 NC7SZ74 US8_8_VSSOP70 2 U12,U13 LP38693MP-ADJ SOT223-471 1 Y1 OSC4/SM 4_PIN_SMT10 SERDESUB-16OVT EVM User’s Guide SNLU108 – July 2012 8. APPENDIXSerializer and Deserializer PCB SchematicsAppendix12 SERDESUB-16OVT EVM User’s Guide SNLU108 – July 201214 SERDESUB-16OVT EVM User’s Guide SNLU108 – July 2012FCC WarningThis evaluation board/kit is intended for use for ENGINEERING DEVELOPMENT, DEMONSTRATION, OR EVALUATION PURPOSES ONLY and is not considered by TI to be a finished end-product fit for general customer use. It generates, uses, and can radiate radio frequency energy and has not been tested for compliance with the limits of computing devices pursuant to part 15 of FCC rules, which are designed to provide reasonable protection against radio frequency interference. Operation of this equipment in other environments may cause interference with radio communications, in which case the user at his own expense will be required to take whatever measures may be required to correct this interference.EVALUATION BOARD/KIT IMPORTANT NOTICETexas Instruments (TI) provides the enclosed product(s) under the following conditions:This evaluation board/kit is intended for use for ENGINEERING DEVELOPMENT, DEMONSTRATION, OR EVALUATION PURPOSES ONLY and is not considered by TI to be a finished end-product fit for general consumer use. Persons handling the product(s) must have electronics training and observe good engineering practice standards. As such, the goods being provided are not intended to be complete in terms of required design-, marketing-, and/or manufacturing-related protective considerations, including product safety and environmental measures typically found in end products that incorporate such semiconductor components or circuit boards. This evaluation board/kit does not fall within the scope of the European Union directives regarding electromagnetic compatibility, restricted substances (RoHS), recycling (WEEE), FCC, CE or UL, and therefore may not meet the technical requirements of these directives or other related directives.Should this evaluation board/kit not meet the specifications indicated in the User’s Guide, the board/kit may be returned within 30 days from the date of delivery for a full refund. THE FOREGOING WARRANTY IS THE EXCLUSIVE WARRANTY MADE BY SELLER TO BUYER AND IS IN LIEU OF ALL OTHER WARRANTIES, EXPRESSED, IMPLIED, OR STATUTORY, INCLUDING ANY WARRANTY OF MERCHANTABILITY OR FITNESS FOR ANY PARTICULAR PURPOSE.The user assumes all responsibility and liability for proper and safe handling of the goods. Further, the user indemnifies TI from all claims arising from the handling or use of the goods. Due to the open construction of the product, it is the user’s responsibility to take any and all appropriate precautions with regard to electrostatic discharge.EXCEPT TO THE EXTENT OF THE INDEMNITY SET FORTH ABOVE, NEITHER PARTY SHALL BE LIABLE TO THE OTHER FOR ANY INDIRECT, SPECIAL, INCIDENTAL, OR CONSEQUENTIAL DAMAGES.TI currently deals with a variety of customers for products, and therefore our arrangement with the user is not exclusive.TI assumes no liability for applications assistance, customer product design, software performance, or infringement of patents or services described herein.Please read the User’s Guide and, specifically, the Warnings and Restrictions notice in the User’s Guide prior to handling the product. This notice contains important safety information about temperatures and voltages. For additional information on TI’s environmental and/or safety programs, please contact the TI application engineer or visit /esh.No license is granted under any patent right or other intellectual property right of TI covering or relating to any machine, process, or combination in which such TI products or services might be or are used.EVM WARNINGS AND RESTRICTIONSExceeding the specified input range may cause unexpected operation and/or irreversible damage to the EVM. If there are questions concerning the input range, please contact a TI field representative prior to connecting the input power.Applying loads outside of the specified output range may result in unintended operation and/or possible permanent damage to the EVM. Please consult the EVM User's Guide prior to connecting any load to the EVM output. If there is uncertainty as to the load specification, please contact a TI field representative.During normal operation, some circuit components may have case temperatures greater than 85° C. The EVM is designed to operate properly with certain components above 60° C as long as the input and output ranges are maintained. These components include but are not limited to linear regulators, switching transistors, pass transistors, and current sense resistors. These types of devices can be identified using the EVM schematic located in the EVM User's Guide. When placing measurement probes near these devices during operation, please be aware that these devices may be very warm to the touch.Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265Copyright © 2012, Texas Instruments IncorporatedNOTESIMPORTANT NOTICETexas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications, enhancements, improvements, and other changes to its products and services at any time and to discontinue any product or service without notice. Customers should obtain the latest relevant information before placing orders and should verify that such information is current and complete. All products are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment.TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s standard warranty. Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty. Except where mandated by government requirements, testing of all parameters of each product is not necessarily performed.TI assumes no liability for applications assistance or customer product design. Customers are responsible for their products and applications using TI components. To minimize the risks associated with customer products and applications, customers should provide adequate design and operating safeguards.TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right, copyright, mask work right, or other TI intellectual property right relating to any combination, machine, or process in which TI products or services are used. Information published by TI regarding third-party products or services does not constitute a license from TI to use such products or services or a warranty or endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual property of the third party, or a license from TI under the patents or other intellectual property of TI. Reproduction of information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied by all associated warranties, conditions, limitations, and notices.Reproduction of this information with alteration is an unfair and deceptive business practice. TI is not responsible or liable for such altered documentation. Resale of TI products or services with statements different from or beyond the parameters stated by TI for that product or service voids all express and any implied warranties for the associated TI product or service and is an unfair and deceptive business practice. TI is not responsible or liable for any such statements.TI products are not authorized for use in safety-critical applications (such as life support) where a failure of the TI product would reasonably be expected to cause severe personal injury or death, unless officers of the parties have executed an agreement specifically governing such use. Buyers represent that they have all necessary expertise in the safety and regulatory ramifications of their applications, and acknowledge and agree that they are solely responsible for all legal, regulatory and safety-related requirements concerning their products and any use of TI products in such safety-critical applications, notwithstanding any applications-related information or support that may be provided by TI. Further, Buyers must fully indemnify TI and its representatives against any damages arising out of the use of TI products in such safety-critical applications.TI products are neither designed nor intended for use in military/aerospace applications or environments unless the TI products are specifically designated by TI as military-grade or "enhanced plastic." Only products designated by TI as military-grade meet military specifications. Buyers acknowledge and agree that any such use of TI products which TI has not designated as military-grade is solely at the Buyer's risk, and that they are solely responsible for compliance with all legal and regulatory requirements in connection with such use.TI products are neither designed nor intended for use in automotive applications or environments unless the specific TI products are designated by TI as compliant with ISO/TS 16949 requirements. Buyers acknowledge and agree that, if they use any non-designated products in automotive applications, TI will not be responsible for any failure to meet such requirements.Following are URLs where you can obtain information on other Texas Instruments products and application solutions:Products ApplicationsAmplifiers Audio /audioData Converters Automotive /automotiveDSP Broadband /broadband Interface Digital Control /digitalcontrolLogic Military /militaryPower Mgmt Optical Networking /opticalnetwork Microcontrollers Security /securityRFID Telephony /telephonyLow Power /lpw Video & Imaging /videoWireless Wireless /wirelessMailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265Copyright © 2012, Texas Instruments Incorporated。
ELMO简明使用手册
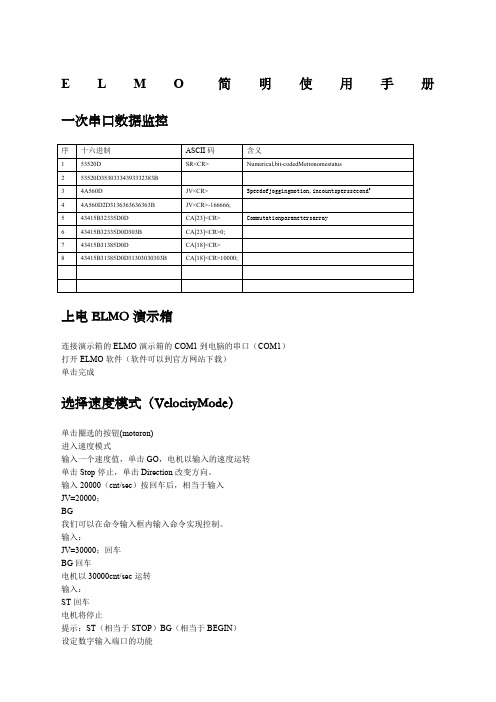
E L M O简明使用手册一次串口数据监控上电ELMO演示箱连接演示箱的ELMO演示箱的COM1到电脑的串口(COM1)打开ELMO软件(软件可以到官方网站下载)单击完成选择速度模式(VelocityMode)单击圈选的按钮(motoron)进入速度模式输入一个速度值,单击GO,电机以输入的速度运转单击Stop停止,单击Direction改变方向。
输入20000(cnt/sec)按回车后,相当于输入JV=20000;BG我们可以在命令输入框内输入命令实现控制。
输入:JV=30000;回车BG回车电机以30000cnt/sec运转输入:ST回车电机将停止提示:ST(相当于STOP)BG(相当于BEGIN)我们可以设定INPUT1为高电平,硬停止通过命令输入JV=30000;BG电机开始旋转,然后将INPUT1拨动到高电平,电机停止,当INPUT1拨回高电平后,电机恢复运转,因为硬停止,并不更改软件的运动状态。
但是,当我们使用“SoftStop”时,当我们置INPUT1为高电平后,软件也停止了,即使,再让INPUT1为高电平后,电机也不能恢复运转。
其他功能的配置如下:更多指令MO=1MO=0以上的含义是:Motoron/offUM Unitmode:stepper,torquecontrol,speedcontrolpositioncontrolordualloop CurrentMode电流模式下,输入命令UM返回1VelocityMode速度模式下,输入命令UM返回2StepperMode步进模式下,输入命令UM返回3DualLoopMode,输入命令UM返回4PositionMode,输入命令UM返回5Unitmode(UM):DefinesthefunctionoftheMetronome.Theunitmodesare: ∙UM=1Torquecontrol∙UM=2Speedcontrol∙UM=3Micro-stepping∙UM=4Dual-feedbackpositioncontrol∙UM=5Single-feedbackpositioncontrolRM Referencemode:external(analog)referencingenabled/disabled所有命令:Command DescriptionPP[N]DefinetheparametersoftheCANorRS-232communicationCommand DescriptionAG[N]AnaloggainsarrayAS[N]AnaloginputoffsetsarrayBP[N]BrakeparameterCA[N]CommutationparametersarrayCL[N]CurrentcontinuouslimitationsarrayEF[N]EncoderfilterfrequencyEM[N]ECAMparametersFF[N]FeedforwardFR[N]FollowerratioHM[N]HomingandcapturemodeHY[N]AuxiliaryhomeandcapturemodeMC Definemaximumpeakcurrentofservodrive,inamperesMP[N]Motion(PT/PVT)parametersPL[N]PeakdurationandlimitPM ProfilermodePT PositiontimecommandPV PositionvelocitytimecommandPW[N]PWMsignalparametersQP PositionQT TimeQV VelocityRM Referencemode:external(analog)referencingenabled/disabledTR TargetradiusUM Unitmode:stepper,torquecontrol,speedcontrolpositioncontrolordualloop VH[N]HighreferencelimitVL[N]LowreferencelimitXM[N]XModuloYM[N]YModuloCommand DescriptionGS[N]GainschedulingKG[N]GainscheduledcontrollerparametersKI[N]PIDintegraltermsarrayKP[N]PIDproportionaltermsarrayKV[N]AdvancedfilterforspeedloopXA[N]Extraparameters?(more)XP[N]ExtraparametersCommand DescriptionBH GetasamplesignalashexadecimalRC Variablestorecord(twovariablesateachrecordingsequence)RG Recordinggap,insamples.Gapbetweenconsecutivedatarecordings.RL RecordlengthRP[N]RecorderparametersRR Recordingon/offRV[N]RecordedvariablesYM[N]AuxiliarysensormodulocountCommand DescriptionAB[N]AbsoluteencodersettingparametersID ReadactivecurrentIQ ReadreactivecurrentPE PositionerrorPX Mainencoderposition,incountsPY AuxiliarypositionVE Velocityerror,incountspersecond2VX Mainencodervelocity,incountspersecond2VY VelocityofauxiliaryfeedbackYA[N]AuxiliarypositionsensorparametersCommand DescriptionCD CPUdump:CPUanddatabaseexceptionsummaryDF DownloadfirmwareDS DownloadfirmwareEO EchomodeHX SelecthexadecimalordecimalmodeLD LoadparametersformflashmemoryRS ResetMetronometoapre-definedstateandparametervalue SV SaveparameterstoflashmemoryTM SystemtimeTP[N]FloatingwizardparametersTS SamplingtimeTW[N]WizardcommandUF[N]UserfloatarrayUI[N]UserintegerWI[N]Metronomedata,mainlyforusebyComposerWS[N]Metronomedata,mainlyforusebyComposerZP[N]IntegerwizardparametersZX[N]Userprogramandauto-tuningtemporarystorage Command DescriptionAN[N]ReadanaloginputsIB[N]Bit-wisedigitalinputIF[N]DigitalinputfilterIP ReadalldigitalinputsOB[N]Bit-wisedigitaloutputOC[N]OutputCompareOL[N]OutputLogicOP SetalldigitaloutputsCommand DescriptionAC Acceleration,incountspersecond2BG BeginmotionBT BeginmotionatdefinedtimeDC Deceleration,incountspersecond2IL[N]Inputlogic,defininghowdedicatedinputsbehaveJV Speedofjoggingmotion,incountsperssecond2MO Motoron/offPA Absolutepositionreferenceforpoint-to-pointmotionPR Relativepositionreferenceforpoint-to-pointmotionSD StopdecelerationSF SmoothfactorformotioncommandSP Speedforpoint-to-pointmotionST StopmotionusingdecelerationvalueTC TorquecommandCommand DescriptionER[N]MaximumtrackingerrorsHL[N]Over-speedlimitandpositionrangelimitLL[N]LowactualfeedbacklimitPL[N]Peakcurrent,inamperes;andpeakduration,insecondsCommand DescriptionBV MaximummotorDCvoltageDD CANcontrollerstatusDV[N]ReferencedesiredvalueEC Errorcode:getcodeforlastinterpretererrorLC Currentlimitation:reportstatusofcurrentlimitationalgorithmMF Motorfault:codeforlastmotor-disablecauseMS MotionstatusreportingPK PeakmemorySN SerialnumberSR Numerical,bit-codedMetronomestatusTI[N]TemperatureindicationsarrayVR Software(firmware)versionCommand DescriptionCC CompileprogramCP ClearapplicationprogramDL ReceiveaprogramdownloadedfromhostcomputertoMetronome.CanbeusedonlyinComposersoftware.HP HaltprogramexecutionKL Killmotionandstopprogram(likeHP)LP[N]ListparametersLS ListprogramMI MaskinterruptPS ProgramstatusXC Continueprogramexecutionfromcurrentpointer,optionallyuntilagivenbreakpointXQ Executeprogram,optionallystartingatagivenlabelanduntilagivenbreakpoint ELMO编程基础增加模拟量输入:##STARTmo=0um=2il[1]=7il[2]=7il[3]=7il[4]=7il[5]=7mo=1while(1)if(ib[1]==1)jv=20000elseif(ib[2]==1)elseif(ib[3]==1)jv=50000elseif(ib[4]==1)jv=-50000elseif(ib[0]==1)jv=an[1]*60000endbgend下载程序流程:首先,让电机进入motoroff状态编译或者快捷键F7没有错误,编译成功时,单击,下图红色圆圈,上载程序到ELMO驱动器。