功能块参数设置
PID功能块参数表

SFB 41/FB 41“CONT_C”输入参数
PV_IN作为“过程物理值”或者“过程物理值百分比”,SP_INT必须使用相应相同的单位;如果使用PV_PER作为外围设备的实际数值,SP_INT只能使用“-100.0 至 +100.0(%)”作为设定值。
如果设定值是SP_INT是0~10Mpa中的8Mpa,那么需要填写0.8,PV_PER填写硬件外设地址IW XXX;
2)受控量通道中的参数应该有相同的单位。
SFB 41/FB 41“CONT_C”输出参数
SFB 42/FB 42“CONT_S”输入参数
1) “设定值通道”和“过程变量通道”中的参数,应该有相同的单位;
2) 受控量通道中的参数应该有相同的单位。
SFB 42/FB 42“CONT_S”输出参数
SFB 43/FB 43“PULSEGEN”输入参数
精品
输入参数的数值在块中没有限制。
没有参数检查。
SFB 43/FB 43“PULSEGEN”输出参数
-可编辑-。
MULTIPROG PID相关功能块
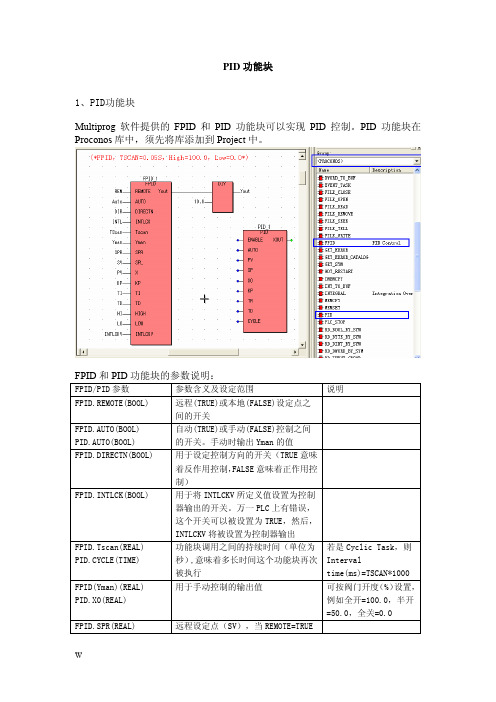
FPID.Yout(REAL) PID.XOUT(REAL)
PID.Enable(BOOL)
时起作用 本地设定点(SV),当 REMOTE=FALSE 时起作用 过程值(PV) 比例常数(K),无单位
积分时间常数(单位秒)
微分时间常数(单位秒)
控制器输出的上限 控制器输出的下限 内部互锁值,当 INTLCK=TRUE 时, Yout 等于此值 调节值(输出值 MV)
和模拟量输出模块 ADAM-5024 的输出有 关联 当一个周期信号将控制 此 PID 功能块的执行 时,可能会使用这个输 入参数
2、单回路控制系统中调节器正反作用的选择
任何一个控制系统在投运前,必须正确选择调节器的正反作用,使控制作用 的方向对头,否则,在闭合回路中进行的不是负反馈而是正反馈,它将不断增大 偏差,最终必将把被控变量引导到受其他条件约束的高端或低端极限值上。
负号
气开 气关
正作用 反作用
3、 PID控制例子
使用 ADAM-5510KW 进行温度 PID 控制的一个例程,控制对象是温度箱的 温度。
ADAM-5024 第 0 通道固定输出 10V 电压控制固态继电器加热水泥电阻。 ADAM-5018 第 0 通道,用 K 型热电偶,采集水泥电阻的温度做 PV 值。 ADAM-5024 第 3 通道输出 0-10V 电压,通过控制风扇的转速通过降温来控 制温度箱的温度。 PID 作用是反作用控制,采用 FPID 功能块。 程序在 Default Task 下实现如下:
远程(TRUE)或本地(FALSE)设定点之
间的开关
FPID.AUTO(BOOL)
自动(TRUE)或手动(FALSE)控制之间
三菱FB功能块的使用

本文目标:讲诉FB块在套接字通讯方面的使用, PLC与工业智能设备通过以太网使用套接字实现通讯
一 、 对于PLC工程类型的设置
当新建工程时,必须勾 选使用标签功能,不管 是简单工程还是结构化 工程
二 、 内置以太网通讯参数设置
· 设置通讯打开方 式为Socket, PLC端口号、通 讯对象端口号、 通讯对象ip(需 设置和PLC在同 一网段内)
• 5.4 关闭端口程序的编写
如右图所示为关 闭端口程序,标 签名全部需用前 面创建好的标签
六、FB块的调用
• 当我们创建好了FB程序时即可以调用创建好的FB块程序
• 调用好了FB就可以在FB左右两侧增加我们需要的条件,进行数据 的发送以及就收了,如下图所示: 开端口程序,标 签名全部需用前 面创建好的标签
• 5.2 发送数据程序的编写
如右图所示 为发送数据 程序,标签 名全部需用 前面创建好 的标签
• 5.3.1 接收数据模式程序的编写
如右图所示,在编 辑接收数据程序前 先编辑接收数据的 模式
• 5.3.2 接收数据程序的编写
三、创建FB功能块
创建名为Socket的FB块,程序语 言为梯形图
四、创建FB块标签
• 标签共分为以下四大部分 1:打开端口类标签的建立 2:发送数据类标签的建立 3:接收数据类标签的建立 4:关闭端口类标签的建立
4.1 打开端口类标签的建立
创建如图所示局部标签名 以及对应的数据类型用于 后续打开端口编程使用
4.2 发送数据类标签的建立
创建如图所示局部标签名 以及对应的数据类型用于 后续发送数据编程使用
4.3 接收数据类标签的建立
创建如图所示局部标签名 以及对应的数据类型用于 后续接收数据编程使用
CM功能块参数介绍

Control StrategyData Acquisition•数据采集回路–来自现场的模拟量信号的指示和报警监视•核心功能块--DACA•组态要点:–DACA功能块名字–量程设定/工程单位–报警设置Honeywell PVEU Range HI:PV量程上限PVEU Range Lo:PV量程下限PVExtendedHi Limit:扩展上限PVExtendedLo Limit:扩展下限Low Signal Cut Off:小信号切除,小于指定值不采样Honeywell Honeywell此处指定的模式是下装后的初始模式是否允许操作员或程序控制该功能块,比如改变mode/sp,Mode Attribute=operator 操作员可以操控该功能块Mode Attribute=program 程序可以操控该功能块,操作员则不能操控是否允许操作员改变模式,当ModeAttribute =Operator 时,允许改变HoneywellPID Configuration--------Main tab 变成预设的安全值6.9%或输出扩展下限或输出扩展上限保持原值PID 块发生安全连锁时,PID 块的模式和输出设置PID 块发生BadControl 时,PID 块的模式和输出设置BadControl 通常是由于BadPv 引起的上作Honeywell是否使用PV跟踪在手动模式下SP是否跟踪PV使用此功能后,回路从MAN模式切换到AUTO模式后输出不变化,这就是无扰切换是否使用SP斜坡功能使用SP斜坡功能在自动模式下改变SP,使SP按照一定的速率缓慢平滑地改变,使用此功能后,输出的变化也将是缓慢平滑的Normal Ramp Rate:SP变化速率,XXEU/minMax Ramp Deviation:引起爬坡过程暂停的(PV-SP)偏差DO通道用于传输输出命令至现场设备状态描述PV反馈状态是否使用连锁功能Bypassperm Bypass在指定的反馈时间过后如果PV<>OP,使用该选项将OP 置成State0设置设备动作的反馈时间,如果PV 在反馈时间之后不等于OP ,则产生COMMDIS 报警 如果超过CommandFail 中指定的时间,PV 没有变化,则产生CMF 报警。
CP1H MODBUS通讯功能块使用说明
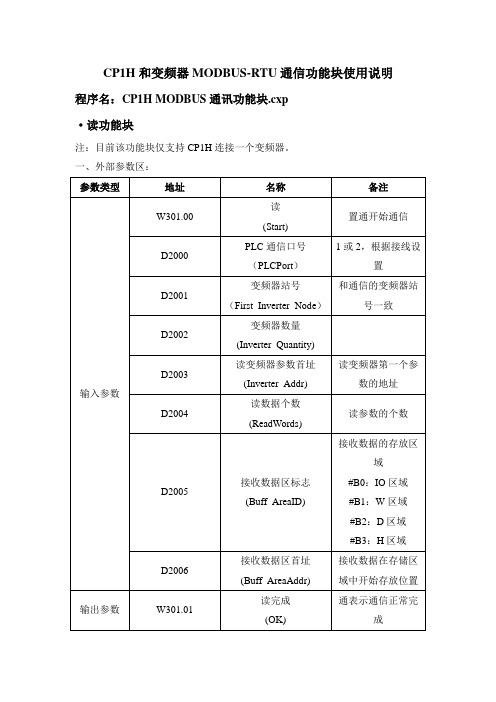
CP1H和变频器MODBUS-RTU通信功能块使用说明程序名:CP1H MODBUS通讯功能块.cxp·读功能块注:目前该功能块仅支持CP1H连接一个变频器。
一、外部参数区:注:1、参数区地址可以更改,可以将D2000-D2009,W301改成别的地址2、关于接收数据存放地址,例:标志为:#B2,首址为:&9950,则接收到的数据存在D9950开始的地址内。
二、接收数据存储区:经验证,本功能块一共输出14组相同的数据。
接收数据区长度为:读数据个数×14。
例:标志为:#B2,首址为:&9950,读个数为:6,则接收数据存储区为:D9950—D10133。
·写功能块一、外部参数区:注:1、参数区地址可以更改,可以将D2000-D2009,W302改成别的地址二、写入数据存储区:写入数据存储区存放要写入变频器的数据。
例:标志为:#B2,首址为:&9900,写入个数为2,则将D9900,D9901中的数据写入变频器中。
·使用说明(读写类似)注:读和写不能同时进行,写完之后可以立即读,但读完之后要有个间隔才能写。
可以通过控制W301.00(读)和W302.00(写)的通断来控制读写。
1、创建功能块:功能块—插入功能块—梯形图,命名为:读变频器2、双击【读变频器】,打开功能块编辑窗口,可以自己编辑功能块3、将别人编辑好的功能块【复制】【粘贴】到自己的程序中4、在通讯段中设置参数内容注:功能块启动信号Start不能上电导通。
5、、在通讯段编辑窗口里面,点击菜单【插入】【功能块调用】,在弹出窗口中输入实例名(如Q1等),选择功能块定义(即使用哪个功能块),确定5、点击参数前面区域,按【回车键】输入各个参数,其中EN接常通接点6、设置通讯口参数和变频器参数,即可开始通信。
CP1H参数设置(和变频器设置一致)串口1/2通信设置:定制波特率:9600 格式:8,1,N 模式:串口网关V1000变频器参数设置。
DeltaV功能块参数

有状态的离散值
当前值转换;强制转换 为目标类型。
模式
当前值转换为目标模式
布尔值
如果数据源当前值等于 零,当前值设为零。否 则当前值置为一。
有状态的布尔值
如果数据源当前值等于 零,当前值设为零。否 则当前值置为一。
操作位串
当前值转换;无数据丢 失。
命名集
当前值转换;强制转换 为目标类型。
8位有符号整数
当前值转换;强制转换 为目标类型。
32位无符号整数
当前值转换;强制转换 为目标类型。
32位有状态的无符号 当前值转换;强制转换
整数
为目标类型。
浮点数
当前值转换;精确度丢 失。
有状态的浮点数
当前值转换;精确度丢 失。
有状态的离散值
当前值转换;强制转换 为目标类型。
模式
当前值转换为目标模式
布尔值
如果数据源当前值等于 零,当前值设为零。否 则当前值置为一。
命名集(Named Set ) – 从0到255之间的一个显示所分配文本信息的值
可选位串(Option Bitstring) – 一个表示所选的16位无符号值。
缩放(Scaling )– 用来转换浮点值到需要的工程单位的数。
字符串(String) – 最多255个字符。
您可以展开控制工作室的参数视图查看每个参数的类型。
不同类型的参数在功能块之间可以传递,所以有关于数据兼容性和转换的规则。数据转换由DelatV软件自动执行。
有状态的数据类型根据转换的不同按照下面三种方式处理:
当数据是从一个有状态的数据类型转换到另外一个状态的数据类型时,状态数据从一个功能块复制到另一个功能 块。
当数据是从有状态的数据类型转换到无状态数据的,状态数据丢失。 当数据类型从没有状态数据的类型转换到有状态数据的,就会创建一个良好的状态数据。
08 S120自由功能块的使用

华东区客户支持-产品使用入门
S120自由功能快的使用
BU:MC
产品线:S120
功能类别:
作者:汤俊杰
日期:2009-6-17
简要描述:
本文讲述了S120自由功能快的激活及使用
1. 功能的目的,使用条件以及适用范围
S120提供了丰富的自由功能块供用户使用,为用户提供了一个不错的选择。
2. 原理及框图
3. 功能说明:
1) 所需软硬件的最低版本要求
Starter版本:4.0及以上
CU320版本:2.4及以上
2)激活freeblock功能
选中Control_Unit右击,选择Properties单击,如下图:
在随后出现的窗口中选择Function_Modules标签,并将其下的Free function blocks打上勾,按OK键确认
此时打开Control_Unit的专家列表参数可以见到P20000开始的自由功能块的参数
使用同样的方法也可激活Drive下的自由功能块,此处不再重复讲述了。
3)使用自由功能块
举个逻辑与的例子,其功能图见上图
我们要实现DI0与DI1逻辑与的功能(当DI0与DI1皆为1时,r20031才为1)
为此我们设置的参数如下图所示
在运行之前我们还必须设置一下该自由功能块运行的周期时间:设置的参数如下图所示:
能块的激活及使用的全部步骤。
欧姆龙PLC编程软件中功能块的使用方法
欧姆龙PLC编程软件中功能块的使用方法欧姆龙PLC编程软件也增加了编制功能块的功能软件的功能块功能符合IEC61131–3标准一个功能块调用一个梯形图的例子使用功能块的主要目的是促进良好的结构化编程,功能调用;让复杂的程序创建的代码更少,更易于程序的管理。
一个功能块由块头和块体组成块头—要在功能块程序中使用的数据:作为输入和输出的连接的变量,功能块内部变量,用块内本地参数定义-形参。
块体包含可能的指令,算法-这是功能块每次执行时的实际的代码。
调用中,对应输入和输出变量用实际对应的变量代入。
不是所有的PLC都可以创建功能块。
可以建立功能块欧姆龙PLC:CJ1M,CJ,CS,CP1H/L等;每一类型的PLC能创建的功能块数量是不同的。
在PLC中最多可以定义64个功能块,最多可以写30000条语句。
创建和使用功能块的步骤一、PLC必须是一个有效的PLC类型。
二、是功能块的定义创建。
选择合适的功能块类型:梯形图或结构化文本;新的功能块被创建,它的名称将默认为‘功能块’。
三、是打开功能块进行编辑,包括在块头中设置使用功能块变量;块体使用书面的算法功能块梯形结构化编辑器或文本编辑器编写。
四、创建后的功能块可以在主程序梯图编辑器中调用使用。
如果某具体的功能块已经存在,那么可以从‘FB列表中’选择。
如果没有,创建的功能块只需要输入一个新名称,选择适当的‘FB 列表’定义。
选择的功能块会自动在全局符号表中创建(包括分配在功能块头中定义的每个变量的内存);功能块的调用将在梯形图中显示。
或者选中树型菜单中[功能块],再从下拉菜单[插入]中选择[功能块]有几种形式创建一是从文件中直接导入(后缀.CXF)现有的功能块;选择在编程区适当的单元格中,右键调用,或者使用从[插入]菜单[功能块调用]选项。
EDID标准详解
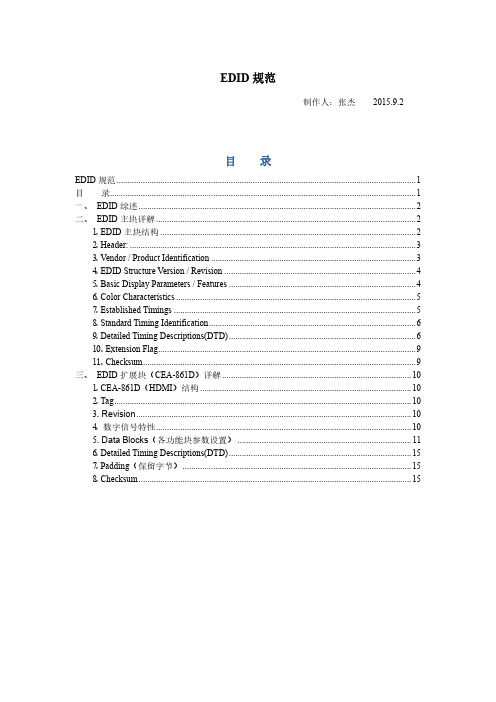
EDID规范制作人:张杰2015.9.2目录EDID规范 (1)目录 (1)一、EDID综述 (2)二、EDID主块详解 (2)1. EDID主块结构 (2)2. Header: (3)3. Vendor / Product Identification (3)4. EDID Structure Version / Revision (4)5. Basic Display Parameters / Features (4)6. Color Characteristics (5)7. Established Timings (5)8. Standard Timing Identification (6)9. Detailed Timing Descriptions(DTD) (6)10. Extension Flag (9)11. Checksum (9)三、EDID扩展块(CEA-861D)详解 (10)1. CEA-861D(HDMI)结构 (10)2. Tag (10)3. Revision (10)4. 数字信号特性 (10)5. Data Blocks(各功能块参数设置) (11)6. Detailed Timing Descriptions(DTD) (15)7. Padding(保留字节) (15)8. Checksum (15)一、EDID综述EDID: Extended Display Identification Data (外部显示设备标识数据)----指DDC 通讯中传输的显示设备数据。
版本演变过程:Version:1.0 -> Version 1.1 -> Version 1.2 -> Version 1.3 -> Version2.0VGA、DVI的EDID由主块128字节组成,HDMI的EDID增加扩展块(128字节),扩展块数据规范按照CEA-861x标准定义。
PIDE参数设置指导

带自动、手动、手操和覆盖控制功能的 带自动、手动、手操和覆盖控制功能的PIDE 用于 程序控制状态输入和输出
串级和比率控制的额外输入和输出
输入和输出
上述图例和下表显示了布尔量输入,它们的标签名以 “Prog”开头,还有一系列当功能块处于操作员状态时使用 的复制输入,它们的标签名以“Oper”开头。这些输入的名 字前面显示一个星号。 下表显示了如何由不同的输入组合实现PIDE功能块的 不同控制模式。状态指示器的状态在右边的列中显示。
状态 1 – 指令故障 Ⅰ
状态字位地址 1.00 1.01 1.02 1.03 1.04 1.05 1.06 1.07 1.08 1.09 1.10 1.11 1.12 1.13 1.14 1.15 1.16 1.17 1.18 1.19 1.20 1.21 1.22 1.23 1.24 1.25 1.26 1.27 1.28 参数 InstructFault PVFaulted CVFaulted HandFBFaulted PVSpanInv SPProgInv SPOperInv SPCascadeInv SPLimitsInv RatioProgInv RatioOperInv RatioLimitsInv CVProgInv 说明 检测到指令故障。 过程变量 (PV) 无效。 控制变量 (CV) 无效。 Hand FB 数值无效。 PVEUMax <= PVEUMin SPProg < SPLLimit或SPProg > SPHLimit SPOper < SPLLimit或SPOper > SPHLimit SPCascade < SPLLimit或SPCascade > SPHLimit SPLLimit < PVEUMin, SPHLimit > PVEUMax或SPHLimit < SPLLimit. RatioProg < RatioLLimit或RatioProg > RatioHLimit RatioOper < RatioLLimit或RatioOper > RatioHLimit Low limit < 0或High limit < low limit. 注释 18 18 19 1 1 1 2 3 3 4 4 4 5 6 7 8 9 10 11 12 13 14 15
功能块说明书

FB1IN4为1时有效,0时无效。
FB2IN1IN2IN3/4高低限IN5扫描周期IN6为1时有效,0时无效。
积分公式为IN2* IN1*S/(1+IN1*S)FB4IN0 SPIN1 PVIN2 比例带IN3 TiIN4 TdIN5 偏差死区IN6 前馈IN7 高限IN8 低限IN9 为IN2的高限IN10 A/M 0为自动IN11 闭锁增加IN12 闭锁减少IN13 跟踪IN14 扫描周期FB210IN0 SPIN1 PVIN2 KpIN3 TiIN4 TdIN5 偏差死区IN6 前馈IN7 高限IN8 低限IN9 为IN2的高限IN10 A/M 0为自动IN11 闭锁增加IN12 闭锁减少IN13 0IN14 跟踪IN15 扫描周期FB10模拟量切换块IN2为0时,IN0切换至IN1,过渡速率为IN4*IN5/60;IN2为1时,IN1切换至IN0,过渡速率为IN3*IN5/60。
FB11FB16带高低限的纯积分。
IN5、IN6为高低限。
IN0-IN1为偏差信号,IN2为积分时间,IN11为扫描周期。
FB220FB220 速度累加块说明:当In0为由0变为1时,每循环周期以IN4的增量值进行累加,输出给OUT6,直到达到上限值In1,重新归0,In2停止位为1时,累加结果重新归0。
In3为1时,IN0脉冲的反复触发都将使累加归零后重新开始,In3为0时IN0的反复脉冲不起作用,OUT5为程序累加正在进行标志位。
FB19IN1为0时,输出=输入;IN1为1时,当IN2为0时,输出按照上升速率IN3*IN5/60,下降速率IN4*IN5/60跟踪输出变化,当IN2为1时保持当前值。
FB20当IN0<0时,输出=IN0*IN2;当IN0>=0时,输出=IN0*IN1.FB271FC6OUT5=(IN0*IN2)/(IN1*IN3)+IN4,如果分母IN0*IN2=0时,则按照IN0*IN2=0.1计算。
台达功能块的使用方法
台达功能块的使用方法
台达功能块是台达PLC(可编程逻辑控制器)中的基本组成部分,用于实现各种控制逻辑和功能。
使用台达功能块需要按照以下步骤进行:
1. 选择合适的功能块类型,台达PLC提供了各种不同类型的功能块,如逻辑运算、计数器、定时器、数据处理等。
根据控制系统的需求,选择合适的功能块类型。
2. 配置功能块参数,在选择功能块类型后,需要配置功能块的参数,包括输入输出的地址、逻辑条件、计数器初始值、定时器时间等。
根据具体的控制逻辑要求,进行参数配置。
3. 编写功能块程序,在PLC编程软件中,根据选定的功能块类型和配置的参数,编写功能块程序。
程序可以采用类似于传统的逻辑图形式,也可以采用类似于编程语言的文本形式。
4. 调试和测试功能块程序,编写完功能块程序后,需要进行调试和测试,确保功能块的逻辑和功能符合预期要求。
可以通过PLC 仿真软件或者连接实际设备进行测试。
5. 部署功能块程序,经过测试无误后,将功能块程序部署到实际的PLC设备中,让其开始运行控制系统。
总的来说,使用台达功能块需要根据实际的控制需求选择合适的功能块类型,配置参数,编写程序,测试调试,最终部署到实际设备中。
这样才能实现对控制系统的精确控制和运行。
功能块参数设置

常用功能块主要参数设置一、AI功能块1、功能块名称(Tag)由用户定义:例如:TT-2305;FT-501;LT-22011、功能块名称(Tag)由用户定义:例如:TIC-2305;FIC-501;LICA-22011、功能块名称(Tag)由用户定义:例如:TY-2305;FY-501;L Y-22011、功能块名称(Tag)由用户定义:例如:ARTH -2305;ARTH -501;ARTH -22011、功能块名称(Tag)由用户定义:例如:CHAR-2305;CHAR-501;CHAR-22011、功能块名称(Tag)由用户定义:例如:SPLT-2305;SPLT-501;SPLT-2201附录:ARTH 功能块中的计算公式:0--80:65)44()33(22K K K IN K IN K IN KI PV OUT +•+•++••=可以实现如:ZT PK Q Q f h •••= 1:65)443322(2K K K IN K IN K IN KI PV OUT +••+•+•••= 可以实现如:)(2T K T K K K Q Q f h •+•+••=)(P K K K Q Q f h •+••=2:654433)22()1(K K K IN K IN K IN K PV OUT +•⎥⎦⎤⎢⎣⎡•+++•+= 可以实现如:RATIO Q Q WILD SP •= 3:651K K PV OUT K +•= 可以实现如:K P Q •∆=2/54:65)4433()221(K K K IN K IN K IN K PV OUT +••+•••+•= 可以实现如:)(21T T Q K Q VOL HEAT -••=5:65)4433221(K K IN K IN K IN K PV K OUT +••+•+•+•= 6:65)4433221(4321K K K IN K IN K IN K PV OUT +••+•+•+•= 7:654433221K K K IN K IN K IN K PV OUT +••+••+•=可以实现如:BM MB TB BT h P P P P h •--=8:2)12()_1()1)12((()2(K T T INPUT PREV K IN K T T K OUT OUT •-•-•+-+•=)九、其它功能块1、AALM ANALOG ALARM(模拟报警)2、CIAD COMMUNICATION INPUT ANALOG DATA(PLC用)3、CIDD COMMUNICATION INPUT DIGITAL DATA(PLC用)4、COAD COMMUNICATION OUTPUT ANALOG DATA(PLC用)5、CODD COMMUNICATION OUTPUT DIGITAL DATA(PLC用)6、SPG SETPOINT RAMP GENERTTOR(SP斜坡发生器)7、ABR ANALOG BRIDGE(模拟桥)8、DBR DIGITAL BRIDGE(数字桥)9、DENS DENSITY(密度)十、PCI卡中另有可以公共使用的如下功能块:1、4个PID功能块2、4个ARTH功能块3、6个INT功能块4、4个CHAR功能块5、4个SPG功能块6、6个AALM功能块7、6个DEN功能块8、4个ABR功能块9、4个DBR功能块十一、现场总线组态步骤SYSCON系统组态软件是为了配置、维护和操作Smar现场总线产品而专门开发的软件。
功能码

5.7 步序控制功能块(STEPCONTROL) step control1. 功能块图例:2. 功能块设置页面:有外部连接的数字量输入端不能修改初值,没有外部连接的输入端则可以修改初值。
输入变量说明输出变量说明3. 功能块参数说明:4. 算法描述:步序逻辑功能块提供了子组级顺序逻辑的标准实现算法。
步序逻辑功能块可接受上级顺控逻辑或运行人员的启动指令,并将相应设备置为顺控方式。
步序的执行既是有条件触发的,同时也是基于时间的。
当前步的操作成功(反馈信号到达/反馈信号到达,超过设定时间)后,程序自动进行下一步。
如出现故障并经一定的时间延迟仍未消失或达到步序设定时间操作仍未完成,步序逻辑被终止。
当顺控逻辑启动后,运行人员可以在任意时刻人工终止程序,或选择跳步、置步。
跳步和置步操作在满足设备安全条件下才被执行。
每个步序逻辑算法可以完成不超过8步的设备自动步序逻辑操作。
通过级联多个步序逻辑可实现更复杂的顺序控制逻辑。
5.12 设备驱动功能块(DV) DEVICE1. 功能块图例:2. 功能块设置页面:有外部连接的数字量输入端不能修改初值,没有外部连接的输入端则可以修改初值。
输入变量说明图例输出变量说明图例3. 功能块参数系统生成参数:用户录入参数:输入项:输出项:5.2 模拟手动站功能块(M/A) analogue man station1. 功能块图例:2. 功能块设置页面:有外部连接的数字量输入端不能修改初值,没有外部连接的输入端则可以修改初值。
M/A 输入输出变量说明及输入初值设置 模拟手动站调试操作界面 3. 功能块参数说明:4. 算法描述:当系统发出驱动执行机构的控制信号时,模拟手动站为操作员提供了一个对该控制信号进行人工干预的界面。
模拟手动站工作方式:自动、手动,跟踪。
自动方式,即TS=0:Y = ( K*X + Bias ) + FF, YL<=Y<=YH, FF为前馈信号;手动方式:Y = ManOut;跟踪方式,即TS=1:Y = TR, TR为跟踪输入,此时屏蔽闭锁增BI,闭锁减BD和手动增减信号,SP在此方式下也不起作用,但是可以增减;当闭锁增BI=1,闭锁减BD=1时:Y保持不变;设定值SP:由运行人员在手操面板上操作的设定值,随调试面板上SP增减按钮而增加和减少,且SPL<=SP<=SPH;自动方式下,手动调试输出按钮不起作用;手动方式下,输出Y由操作员通过手操面板上的手动增减按钮确定;方式切换:●强制手动:MRE=1时,M/A站切为手动方式;●手操面板上的手动、自动按钮使M/A站切至手动、自动方式。
参数可设置LPM宏功能块应用

aset:异步置位输入;
]:计数输出;
sload:在clk的上升沿同步并行数据加载输入; cout:计数进位或借位输出。
LPM_WIDTH:计数器位宽;
cnt_en:计数使能控制,
1.1 基于LPM_COUNTER的数控分频器设计
图6-19 数控分频器电路原理图
1.1 基于LPM_COUNTER的数控分频器设计
WIDTH = 8 ; DEPTH = 256 ; ADDRESS_RADIX = HEX ; DATA_RADIX = HEX ; CONTENT BEGIN 00:00 ; 01:00 ; 02:00 ; 03:00 ; 04:00 ; 05:00 ; 06:00 ; 07:00 ; 08:00 ; 09:00; 10:00 ; 11:01 ; 12:02 ; 13:03 ; 14:04 ; 15:05 ; 16:06 ; 17:07 ; 18:08 ; 19:09; 20:00 ; 21:02 ; 22:04 ; 23:06 ; 24:08 ; 25:10 ; 26:12 ; 27:14 ; 28:16 ; 29:18; 30:00 ; 31:03 ; 32:06 ; 33:09 ; 34:12 ; 35:15 ; 36:18 ; 37:21 ; 38:24 ; 39:27; 40:00 ; 41:04 ; 42:08 ; 43:12 ; 44:16 ; 45:20 ; 46:24 ; 47:28 ; 48:32 ; 49:36; 50:00 ; 51:05 ; 52:10 ; 53:15 ; 54:20 ; 55:25 ; 56:30 ; 57:35 ; 58:40 ; 59:45; 60:00 ; 61:06 ; 62:12 ; 63:18 ; 64:24 ; 65:30 ; 66:36 ; 67:42 ; 68:48 ; 69:54; 70:00 ; 71:07 ; 72:14 ; 73:21 ; 74:28 ; 75:35 ; 76:42 ; 77:49 ; 78:56 ; 79:63; 80:00 ; 81:08 ; 82:16 ; 83:24 ; 84:32 ; 85:40 ; 86:48 ; 87:56 ; 88:64 ; 89:72; 90:00 ; 91:09 ; 92:18 ; 93:27 ; 94:36 ; 95:45 ; 96:54 ; 97:63 ; 98:72 ; 99:81; END ;
STEP7 常用功能块(FC块)

目的:FC105的使用1、FC105是处理模拟量(1~5V、4~20MA等常规信号)输入的功能块,在中,打开Libraries\standard library\Ti-S7 Converting Blocks\fc105,将其调入OB1中,给各个管脚输入地址;如下:其中,管脚的定义如下:IN---------模拟量模块的输入通道地址,在硬件组态时分配;HI_LIM---现场信号的最大量程值;LO_LIM--现场信号的最小量程值;BIPOLAR—极性设置,如果现场信号为+10V~-10V(有极性信号),则设置为1,如果现场信号为4MA~20MA(无极性信号);则设置为0;OUT-------现场信号值(带工程量单位);信号类型是实数,所以要用MD200来存放;RET_V AL-FC105功能块的故障字,可存放在一个字里面。
如:MW50;2、热电偶、热电阻信号的处理,该类信号实际值是通道整数值的1/10;3、FB41 PID控制模块的使用;PID模块是进行模拟量控制的模块,可以完成恒压、恒温等控制功能在中,打开Libraries\standard library\ PID Control block\FB41,将其调入OB1中,首先分配背景数据块DB41,再给各个管脚输入地址;如下:4、脉冲输出模块FB43,该模块是将模拟量转换成比率的脉冲输出。
Libraries\standard library\PID Control block\FB43,将其调入OB1中,首先分配背景数据块DB43,再给各个管脚输入地址;如下:5、如果现场是阀门等执行机构,只需要将通道地址输入PID的输出通道,如下:6、如果单独控制变量输出通道,可使用FC106模块,FC106是处理模拟量(1~5V、4~20MA等常规信号)输出的功能块,在中,打开Libraries\standard library\Ti-S7 Converting Blocks\fc106,将其调入OB1中,给各个管脚输入地址;如下:。
现场总线与工业以太网现场仪表功能块及常用参数
积分饱和和控制回路初
PV
D/ 始提化供 给 上 游 块 的 RO BKCAL_IN,用于抗积
分饱和和控制回路无扰
切换
1 RCAS_IN D6-65 7
1 ROUT_IN DS-65 8
1 FF_VAL DS-65 9
2 0
FF_SCAL E
DS-68
2 FF_GAIN 浮点 1
2 HI_AIM DS-71 2
功能块是现场总线技术的载体,不但仪表制造厂要掌握 它,用户工程师更要掌握它。只有掌握了功能块的配置组合 和参数设定,才能根据控制对象的动态特性,形成各种各样 的控制策略。
功能块及其应用是一个十分重要和复杂的问题,为了实 现最佳的优化控制方案,对功能块的配置组合和参数设定, 还需一个长期的工程实践和经验积累。每个功能块都有十几 个或几十个参数,并预先定义了名称。,通常列成参数表。只 有理解每个参数的含义,才能在组态中设定好参数,从而形成 合适的控制策略。
1.功能块类型
每种类型的功能块都有一个不同的内部算法以及几个参数 来执行不同类型的功能。功能块不依靠I/O硬件,独立运行基 本的监测和控制功能。例如,模拟输入模块(AI)提供测量所需 基本功能:仿真、推算量程、传递函数、阻尼以及报警。压力 变送器中的标准AI模块跟温度变送器中的相同。无论在变送器 中、定位器中或中央控制器中,无论设备制造商是谁,标准 PID模块都相同。共有四类具备不同特性的功能块(图2.60):
它通常接收来自AI功能块的数据,可以执行最大 (MAX)、最小(MIN)、中间(MID))、平均(AVG)、第一 好(FIRST GOOD)运算和状态的信号选择。功能块的 另一个输出参数是“选中通道(SELECTED)”,它指明 了算法(由SE_LECT_TYPE设定)选中了哪个输入。功 能块支持OOS、Man和Auto模式。
西门子FB块如何使用

西门子S7-300 中FB 功能块的使用方法:1.创建功能块FB1 准备完成如下功能:将“整型”变量转换成“实型”变量2.打开功能块FB1 3.在功能块FB1 中添加入口参数、出口参数、静态变量入口参数=IN0 ---> 整型(INT) 出口参数=OUT1 ---> 实型(REAL) 静态变量=STAT2 ---> 整型(INT) 局部变量=TEMP3 ---> 长整型(DINT)4.创建背景数据块DB2 5.打开DB2 背景数据块,可以看到系统默认建立了三个数据IN0 ---> 入口参数(整型)OUT1 ---> 出口参数(实型)STAT2---> 静态变量(整型)6.打开FB1 功能块,编写如下代码,实现将“整型”变量转换成“实型”变量同时再编写一段静态变量自加 1 代码7.打开OB1 主程序,添加FB1 功能块如何确定程序参数类型的块编号并传送给FC ?介绍使用以下程序代码可确定参数类型(BLOCK_FC, BLOCK_FB, TIMER or COUNTER)的编号。
例 1 :FB 块FB1 变量声明中定义了“ Timer” 类型的变量“ Time_1” ,FB2 中调用FB1,在将定时器“T5” 传递给变量“ Time_1”。
如图01 所示程序代码中数值5 表示“T5”。
图. 01 例 2 FC FC1 变量声明中定义了“ Timer” 类型的变量“ Time_1” ,FC2 中调用FC1,在将定时器“T8” 传递给变量“ Time_1”。
如图02 所示程序代码中数值8 表示“T8”。
图. 02 在使用多重实例时,需要在图01 所示程序中增加以下代码:TAR2 LAR1 P##Time_1 +AR1 L W[AR1,P#0.0] T MW00 //多重实例偏移地址//多重实例偏移地址与当前地址相加“BLOCK_DB”类型参数在调用FC 时不可以直接传送给FC 。
CP1HMODBUS通讯功能块使用说明
CP1HMODBUS通讯功能块使用说明1.配置PLC:- 在CX-Programmer或SYSMAC Studio软件中打开PLC程序,并选择正确的PLC型号和通讯接口。
- 在工程中添加Modbus通讯功能块,并根据实际需求进行配置。
2. 配置Modbus通讯功能块:- 设置Modbus设备的通讯参数,包括通讯端口、波特率、数据位、停止位等。
- 配置Modbus寄存器的起始地址和数量,用于与外部设备进行数据交换或读写操作。
- 设置Modbus通讯的超时时间和重试次数,以便在通讯失败时进行重新尝试。
3. 读写Modbus寄存器:- 使用Modbus通讯功能块的读取指令可以读取Modbus设备的寄存器数据,并将数据存储到PLC的数据区域中。
- 使用Modbus通讯功能块的写入指令可以向Modbus设备的寄存器写入数据,以实现与外部设备的数据交换。
4.错误处理:- 在Modbus通讯过程中可能会出现通讯错误或超时现象,用户可以通过错误处理功能块进行相应的处理。
-在PLC程序中添加错误处理功能块,并根据实际需求进行配置,以防止通讯错误引发故障。
5.程序设计:- 在PLC程序中适当位置添加Modbus通讯功能块的调用指令,以实现与Modbus设备的数据交换。
- 根据实际需求,使用条件语句、定时器等功能块对Modbus通讯进行控制和监控。
总结:CP1H Modbus通讯功能块简化了与Modbus设备的通讯过程,提供了方便的读写寄存器接口,同时具备错误处理功能,保证了通讯的稳定性和可靠性。
通过合理配置和设计,可以实现PLC与Modbus设备间的高效数据交换,满足不同应用场景的需求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
常用功能块主要参数设置
一、AI功能块
1、功能块名称(Tag)由用户定义:例如:TT-2305;FT-501;LT-2201
1、功能块名称(Tag)由用户定义:例如:TIC-2305;FIC-501;LICA-2201
1、功能块名称(Tag)由用户定义:例如:TY-2305;FY-501;L Y-2201
1、功能块名称(Tag)由用户定义:例如:ARTH -2305;ARTH -501;ARTH -2201
1、功能块名称(Tag)由用户定义:例如:CHAR-2305;CHAR-501;CHAR-2201
1、功能块名称(Tag)由用户定义:例如:SPLT-2305;SPLT-501;SPLT-2201
附录:ARTH 功能块中的计算公式:0--8
0:65)
44()33(2
2K K K IN K IN K IN KI PV OUT +∙+∙++∙
∙=
可以实现如:Z
T P
K Q Q f h ∙∙
∙= 1:65)443322(2K K K IN K IN K IN KI PV OUT +∙∙+∙+∙∙∙= 可以实现如:)(2T K T K K K Q Q f h ∙+∙+∙∙=
)(P K K K Q Q f h ∙+∙∙=
2:654433)22()1(K K K IN K IN K IN K PV OUT +∙⎥⎦
⎤
⎢⎣⎡∙+++∙+=
可以实现如:RATIO Q Q WILD SP ∙= 3:651K K PV OUT K +∙= 可以实现如:K P Q ∙∆=2/5
4:65)4433()221(K K K IN K IN K IN K PV OUT +∙∙+∙∙∙+∙= 可以实现如:)(21T T Q K Q VO L HEAT -∙∙=
5:65)4433221(K K IN K IN K IN K PV K OUT +∙∙+∙+∙+∙= 6:65)4433221(4321K K K IN K IN K IN K PV OUT +∙∙+∙+∙+∙= 7:654
4332
21K K K IN K IN K IN K PV OUT +∙∙+∙∙+∙=
可以实现如:BM M
B T
B BT h P P P P h ∙--=
8:2
)12()
_1()1)12((()2(K T T INPUT PREV K IN K T T K OUT OUT ∙-∙-∙+-+∙=
)
九、其它功能块
1、AALM ANALOG ALARM(模拟报警)
2、CIAD COMMUNICATION INPUT ANALOG DATA(PLC用)
3、CIDD COMMUNICATION INPUT DIGITAL DATA(PLC用)
4、COAD COMMUNICATION OUTPUT ANALOG DATA(PLC用)
5、CODD COMMUNICATION OUTPUT DIGITAL DATA(PLC用)
6、SPG SETPOINT RAMP GENERTTOR(SP斜坡发生器)
7、ABR ANALOG BRIDGE(模拟桥)
8、DBR DIGITAL BRIDGE(数字桥)
9、DENS DENSITY(密度)
十、PCI卡中另有可以公共使用的如下功能块:
1、4个PID功能块
2、4个ARTH功能块
3、6个INT功能块
4、4个CHAR功能块
5、4个SPG功能块
6、6个AALM功能块
7、6个DEN功能块
8、4个ABR功能块
9、4个DBR功能块
十一、现场总线组态步骤
SYSCON系统组态软件是为了配置、维护和操作Smar现场总线产品而专门开发的软件。
目前我们使用的版本是SYSCON1.07,共有2张软盘。
Setup即可。
SYSCON的组态过程共涉及2种文件:
⑴FB组态文件(*.FBC),该文件包括现场总线系统组态。
在此文件中包含如下信息:计算机站;现场总线接口和总线;现场总线网络;在控制应用中使用的设备;在每个现场设备中使用的功能块;为每个功能块和设备指定的参数值。
⑵FB链接文件(*.FBL),该文件存储现场总线系统组态的控制策略图,主要包括各功能块之间的链接关系。
产生一个新的现场总线组态是一个开发过程,在此过程中你要选择现场总线通讯接口;选择在你的控制应用中使用的现场设备和将要使用的功能块。
为了组态功能块,你必须指定其参数值。
现场总线组态的步骤如下:
1、使用“File”菜单中的“New”选项或工具条中的产生一个新的文档
“Creates a new document”按钮。
2、选择“FB Config File (*.FBC)”。
3、一个“FB Config File”窗口将出现。
4、将鼠标移动到站图标‘station icon’并单击鼠标右键,将出现一个“New
Interface”菜单项。
5、选择“New Interface”,将出现一个“New Interface”对话框。
选择PCI
(典型)接口或BC1接口,设置相应的属性,单击“OK”按钮。
6、为了选择一个通道,在接口图标‘interface icon’上双击鼠标左键,通
道图标‘channel icon’将会出现。
在通道图标上单击鼠标左键,便可选
择一个通道。
7、为了在所选择的通道上挂一个新的现场总线网络,将鼠标移动到所选择
的通道图标上,单击鼠标右键并选择“Fieldbus”菜单选项。
8、将出现“Device Attributes”对话框,键入标签‘Tag’和地址‘Address’
单击“OK”按钮。
9、将出现现场总线网络图标‘Fieldbus network icon’。
10、在现场总线网络图标上双击鼠标左键,屏幕上将出现设备图标‘device
icon’。
11、为了将一个新设备(New Device)纳入控制应用程序(组态文件),将
鼠标移动到现场总线网络图标上,单击鼠标右键并选择“New Device”
菜单选项,将出现“New Device”对话框。
12、键入标签‘Tag’和地址‘Address’并单击“OK”按钮。
如果在你的
应用程序中需要多个设备,重复第11步。
13、在你用SYSCON开发的控制应用程序中插入所有的设备后,便可插入
功能块。
14、为了将一个新功能块(New Function Block)插入组态文件,将鼠标移
动到选择设备图标上,单击鼠标右键并选择“New Block”菜单选项,
以便插入一个新的功能块。
15、说明全部的功能块以后,你便可以链接各功能块之间的输入和输出参数
(通过做图完成)。
这要产生一个新的链接文件文档来实现。
16、使用“File”菜单中的“New”选项或工具条中的产生一个新的文档
“Creates a new document”按钮。
17、选择“FB Link ’s Files (*.FBL)”。
18、一个“FB Link’s Files”窗口将打开。
你会看到一个新的工具条和一个
新的菜单。
现在你必须打开工具盒窗口。
工具盒窗口中有画控制应用程
序图用的全部工具。
19、选择“Function Block Inserting”(功能块插入)工具,可将功能块插入
画图文件窗口。
20、将要插入的功能块从FBC文件拉入画图窗口,使用MOVE工具将其放
在合适位置。
21、选择“FB Parameter I/O Linking”工具,在画图文件窗口将一个功能块
的输出参数链接的另一个功能块的输入参数。
22、用所选择的“FB Parameter I/O Linking”工具,将鼠标移动到将要链接
的输出参数的功能块并单击鼠标左键。
23、选择输出参数。
24、将鼠标移动到将要接受链接的输入参数的功能块并单击鼠标左键。
25、选择输入参数。
(重复以上步骤,完成全部连接)
26、到此链接已经完成。
接下来的任务是组态参数值并将其下装到现场设
备。
指定功能块参数值的步骤如下:
27、为了选择将要组态的功能块,单击功能块图标。
28、为了选择功能块参数,在功能块图标上双击鼠标左键,将出现参数图标。
在参数图标上单击鼠标左键选择一个参数。
29、为了给参数指定一个值,将鼠标移动到所选择的参数图标上并单击鼠标
右键,带有“Attributes”和“Characterization”项的菜单将出现。
“Attributes”
项用来做一个参数的离线组态,而“Characterization”项用来做在线参
数组态。
30、选择“Characterization”项。
31、将出现一个“Parameter Attributes”(参数属性)对话框。
在要输入值的
框中选择想要的值。
如果参数不是一个简单变量,而是一个数据结构,浏览成员组框将展示它的可用成员名称。
32、“[ ] Save value to configuration file”(将值存入组态文件)检查框用来
将想要的参数值存入FBC文件。
如果它处在“NOT”不检查,将不保
存该值。
“Send”(送入)按钮用来通过现场通讯网络将该值送入现场设
备。