虚功原理.ppt
结构力学虚功原理课件
刚体的位移
01
刚体的位移
在结构力学中,刚体的位移是研究结构在受力作用下的变形和运动状态
的基本概念。刚体的位移涉及到结构的位移、转角、挠度等参数,这些
参数可以通过测量或计算得到。
02
位移的测量
位移的测量是确定结构在受力作用下的变形程度和运动状态的重要手段。
通过测量位移可以了解结构的响应和行为,从而评估结构的性能和安全
能量原理与虚功原理的关系
能量原理与虚功原理 的联系
能量原理和虚功原理都是弹性力学中 的基本原理,它们之间存在密切的联 系。能量原理指出,对于一个处于平 衡状态的弹性体,其总能量(包括外 力势能和内能)在任何微小虚位移下 的改变量等于零。而虚功原理则是能 量原理的一种特殊情况,即当外力势 能忽略不计时,能量原理就变为虚功 原理。
03
虚功原理的推导
力的平衡方程
力的平衡方程是结构力学中的 基本方程,它描述了结构中力 的平衡条件。在平衡状态下, 作用在结构上的所有外力之和 为零。
力的平衡方程可以表示为:∑F = 0,其中∑F表示作用在结构上 的所有外力矢量和。
力的平衡方程是求解静力学问 题的基础,通过它我们可以求 解出结构的位移、应变和应力 等参数。
实例分析
以梁为例,通过应用虚功原理,可以分析梁在不同载荷下的变形和应力分布,从而优化梁的截面尺寸和 形状,提高其承载能力和刚度。
06
总结与展望
虚功原理的重要性和意义
结构力学中的虚功原理是分析结构稳定性和变形的关键理论之一,对于工程设计和建筑安全具有重要 意义。
虚功原理能够为结构设计和优化提供理论基础,帮助工程师更好地理解和控制结构的力学行为,提高结 构的稳定性和安全性。
变形方程,进而求解物体的内力和变形。
虚功原理ppt

i 1
i 1
i 1
又因为体系所受约束是理想约束,于是有
n
r Fi
rri
0
i 1
-
虚功原理的另一种表述
受有理想约束的力学体系平衡的充要 条件是:力学体系的诸主动力在任意虚位 移中所做的元功之和等于零,也叫虚位移 原理。
-
虚功原理的分量表达式
nu u ru r n W F i.r i(F ixx i F iy y i F iz z i) 0
-
1 基本概念
(1)虚位移
想象中可能发生的无限小的位移,而 不是实际发生的。它只决定于质点在此时 刻的位置和加在它上面的约束,时间没有 改变(δt =0), 表示为 rr。
-
关于虚位移的说明 • rr 称为 rr 的变分 • 虚位移一般情况不止一个
-
• 虚位移与可能位移
✓ 稳定约束下实位移是许多虚位移中一个 ✓ 不稳定约束下实位移一般不是虚位移中一个
q r r ti
s
t
r ri
1 q
q
i1, 2, L , n
-
(2)理想约束
如果在任何时刻,对于系统的任何 虚位移,约束力所作的虚功之和等于零, 则系统受到的约束是理想约束。
3n
Rixi 0
i1
n R rirri 0
i1
-
几种典型的理想约束
• 质点沿光滑的曲面运动; • 质量可忽略的刚性杆所连接的两个质点; • 两个刚体以光滑的表面接触; • 两个物体以完全粗糙的表面接触(无滑动); • 两个质点以柔软的且不可伸长的绳子相连接。
P 1 ( l 2 1 c o ) P 2 s ( l 1 c o l 2 2 s c o ) F s ( l 1 s i n l 2 s i) n 0
结构力学虚功原理课件

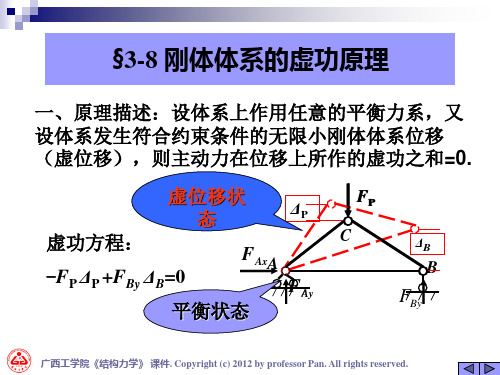
(二)虚功原理
具有理想约束的刚体体系在任意平衡力系作用下,体 系上所有主动力在任一与约束条件相符合的无限小刚 体位移上所作的虚功总和恒等于零。
W 0
刚体体系的虚功方程
所谓理想约束,是指其约束力在虚位移 上所作的功恒等于零的约束。
(三)虚功原理的两种应用
1.虚设位移状态——求未知力
拟求支座A处的支反力
位移的分类:线位移;角位移。
角位移
线位移
A
A
B
B
相对角位移
2、结构位移计算的目的
①验算结构的刚度; ②为超静定结构的内力计算打下基础; ③结构制作、施工的需要。
3、结构位移计算的假定
①材料服从虎克定律。 ②结构的变形是微小的。 ③结构各处的约束都是理想约束。
线弹性体系
§5-2 虚功原理
(1)刚体体系虚功原理 (2)变形体体系虚功原理
FP
A
B FBx
FA
a
b
l
FBy
W FA A FP P 0
FA
FP
P A
P b A l
b FA l FP
FP
A
B
FA
△A
△P
B
A
A 1
P
b l
B
A
FA FP P
虚位移原理
应用虚位移原理求解静定结构的某一约束力时, 一般应遵循如下步骤: (1)解除欲求约束反力的约束,用相应的约束反 力来代替。 (2)把机构可能发生的刚体位移当作虚位移,写 出虚功方程。 (3)求出虚位移之间的几何关系,利用虚功方程 即可求解约束反力。
结构力学
STRUCTURAL MECHANICS
第十讲-虚功原理与单位载荷法_图文
可能内力满足: 虚位移满足:
(平衡条件) (静力边界条件) (变形连续条件)
(位移边界条件)
外力虚功
内力虚功 比较
证毕!
变形体虚功原理的例证——讨论 讨论: 1)简支梁: 位移边界条件与静力边界条件
变形体虚功原理的例证——讨论 2)悬臂梁: 位移边界条件与静力边界条件
§5 单位载荷法
解: 影响小曲率梁变形的主要内力-弯矩
由虚功原理可得
()
杆微段的虚变形用dd *、df *与dq *表示
4、 虚功(以梁为例)
如温度
结构的外力与内力 变形
任取结构的虚位移与虚变形
如何表示? 二者的关系?
5、内力虚功与外力虚功
作用在所有微段上的可能内力 在虚变形上作之总虚功-内力虚功
外力在可能位移上所作之总虚功-外力虚功
变形体虚功原理的例证
第十讲-虚功原理与单位载荷法_图文.ppt
上讲回顾
余功与余能
Complementary Work and Complementary Energy
余功的定义:
弹性体的余能Vc数 值上等于余功:
余能计算 单向应力状态下 的余能密度为
故拉压杆与梁 的余能为
《材料力学(II)》第1版, 单辉祖编著,高教社
变形 1)与外力保持平衡并满足静力边界条件的
内力,称为静力可能内力或可能内力
2)杆的可能内力用FN, T, FS与M表示
)可能内力与外力
结构的静力许可场
几个概念 2、 可能位移与可能变形(运动许可场)
1)满足变形连续条件与位移边界条件的任意结构位 移,称为几何可能位移,相应之变形称为可能变形
单位载荷法的基本公式 单位载荷法的常用公式 例题
虚功原理(微分形式的变分原理)

代入虚功原理中, 代入虚功原理中,有
∂V ∑ ∂q δqα = 0 α =1 α
s
即, δV = 0
虚功原理(微分形式的变分原理) §7-3 虚功原理(微分形式的变分原理)
三、虚功原理的应用
例题3 如图所示, 匀质杆OA, 质量为 1, 长为 1, 能在 质量为m 长为l 例题 如图所示 匀质杆 转动, 竖直平面内绕固定的光滑铰链 O转动 此杆的 A端 转动 端 用光滑铰链与另一根质量为m 长为 长为l 用光滑铰链与另一根质量为 2,长为 2的匀质杆 AB r 相连. 求处于静平衡时, 相连 在 B端有一水平作用力 .求处于静平衡时 两 端有一水平作用力 求处于静平衡时 F 杆与铅垂线的夹角ϕ1和 ϕ2. 1、判断约束类型 、 x O 是否完整约束?是否理想约束 是否理想约束? 是否完整约束 是否理想约束 ϕ 1 l1 2、判断自由度 、 l2 A A 、 B 两点的位置,4个变量 两点的位置,
q1 = ϕ1 , q2 = ϕ 2
r r r r ∂r3 r ∂r1 r ∂r2 +F⋅ Q1 = m1 g ⋅ + m2 g ⋅ l1 ∂ϕ1 ∂ϕ1 ∂ϕ1 y1 = 2 cos ϕ1 ∂x ∂y ∂y = m1 g 1 + m2 g 2 + F 3 l2 ∂ϕ1 ∂ϕ1 ∂ϕ1 y 2 = l1 cos ϕ1 + cos ϕ 2 2 1 = − m1 gl1 sin ϕ1 − m2 gl1 sin ϕ1 + Fl1 cos ϕ1 x3 = l1 sin ϕ1 + l 2 sin ϕ 2 2 =0
广义平衡方程
虚功原理(微分形式的变分原理) §7-3 虚功原理(微分形式的变分原理) 所满足的方程: 可求出系统处于静平衡时ϕ1,ϕ2所满足的方程
结构力学(虚功原理和结构位移计算)ppt课件
A
i
δij
j Pj=1
B
δjj
δjj --直接柔度 δij --间接柔度
δjj >0
>0 δij <0
=0
完整版课件
9
5、计算位移的有关假定
1)、结构材料服从“虎克定律”,即应力、应变成线形关系。
2)、小变形假设。变形前后荷载作用位置不变。
3)、结构各部分之间为理想联结,不计摩擦阻力。
4)、当杆件同时承受轴力与横向力作用时, 不考虑由于杆弯曲 所引起的杆端轴力对弯矩及弯曲变形的影响。
由平衡条件知:
A
R1
b 未知力与已知力 a 之间的几何方程
由虚功方程:
R1
C
a
b
图(a)
C
图(b)
Δ1c1ab0
即
完整版课件
Δ
c1
•
b a
B
B' P=1 B
14
应用虚力原理求未知位移的关键是沿拟求位移Δ方向虚设单 位荷载,并利用平衡条件求与已知位移c1对应的支反力 R1 这种解法称为单位荷载法。
特点:利用静力平衡,通过虚功方程来解几何问题。 适用范围: 刚体体系的位移计算,
若求桁架中AB杆的角位移,应加 一单位力偶,构成这一力偶的两个 集中力的值取 1/d。作用于杆端 且垂直于杆(d 为杆长)。
完整版课件
32
3) 若要求结构上两点(A、B)沿其连线的相对位移,可在 该两点沿其连线加上两个方向相反的单位力。
完整版课件
33
4) 若求梁或刚架上两个截面的相对角位移,可在两个截 面上加两个方向相反的单位力偶。
当静力加载时,即:
P
P由0增加至P
结构力学虚功原理PPT课件
§9-3 位移计算的一般公式 ·单位荷载法
单位荷载法:
——在虚拟的力状态中,于所求位移点 沿所求位移方向施加一个单位荷载,以 使荷载虚功恰好等于所求位移的计算位 移方法。
位移为广义位移,力是与广义位移对 应的广义力。
§9-3 位移计算的一般公式 ·单位荷载法
(3)求解时关键一步X 是找出虚位x 移状态的位移关系。
(4)用单几位何位法移来解法静(U力n平it-衡D问isp题lacement Method)
例题9-1 用单位位移法求图 a所示多跨静定梁的支座反 力FBy和截面E处的弯矩ME。
解:(1)求支座反力FBy
1
1 2
,2
3 4
虚功方程:X 1+FP11+FP22 =0
解得:
bc / a 找出虚力状态的静力
这是虚单位荷载法 (Dummy-Unit平L衡oa关d 系Me。thod)
它是 Maxwell, 1864和Mohr, 1874提出(解4,)几是故何用也问静称题力为。平衡法来
Maxwell-Mohr Method
单位位移法的虚功方程
平衡方程
单位荷载法的虚功方程
平衡力状态之间----虚位移原理
例. 求 A 端的支座反力(Reaction at Support)。直线
A
B
P
P X
C
C
a
(a)
b
X (b)
(c)
待分析平衡的力状态 虚设协调的位移状态
解:去掉A端约束并代以反力 X,构造相应的虚位移状态.
(实(12将通))际对虚由常受静位外力取定移X力状结与/ 虚态构实C的功,际平这 力a总/衡里 状b和方实 态代1为程际 无入零用 关得,的,故:是即可刚M设:体B虚XX位x0移X原b1P理P/,a 实C质上0是
结构力学-虚功原理
G
H
20kN
FQC
1
R
1 FQC .1 + −10 × = 0 2 10kN
FQC
20kN
L FQF
R
FQF
10kN
L
运动前后两杆平行
1 1 FQF .1 + 10 × = 0 2 professor Pan. All rights reserved. 广西工学院《结构力学》 课件. 广西工学院《结构力学》 课件 Copyright (c) 2012 by
M
FQC
1 a+b
机构如何 运动?
1
b a+b
a a+b
虚位移放大说明
1 a+b
1
b a+b
a a+b
运动前后,截面左右杆段无相对转动——需平行
广西工学院《结构力学》 课件. 广西工学院《结构力学》 课件 Copyright (c) 2012 by professor Pan. All rights reserved.
M 例2 求C截 面弯矩 和剪力 A a M M FQC C b
b a+b
B
1 a+b
1
a a+b
1 1 FQC .1 + M . = 0 ⇒ FQC = − M a+b a+b
广西工学院《结构力学》 课件. 广西工学院《结构力学》 课件 Copyright (c) 2012 by professor Pan. All rights reserved.
广西工学院《结构力学》 课件. 广西工学院《结构力学》 课件 Copyright (c) 2012 by professor Pan. All rights reserved.
虚功原理(虚位移原理)
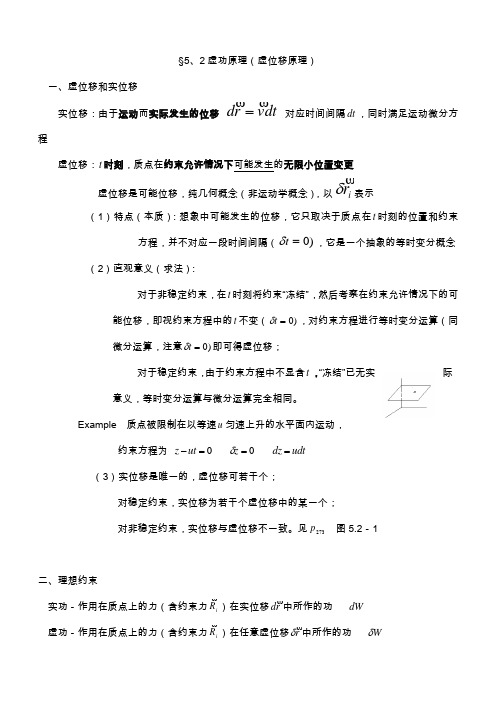
§5、2虚功原理(虚位移原理)一、虚位移和实位移实位移:由于运动而实际发生的位移 dt v r d= 对应时间间隔dt ,同时满足运动微分方程虚位移:t 时刻,质点在约束允许情况下可能发生的无限小位置变更虚位移是可能位移,纯几何概念(非运动学概念),以i rδ表示(1)特点(本质):想象中可能发生的位移,它只取决于质点在t 时刻的位置和约束方程,并不对应一段时间间隔()0=t δ,它是一个抽象的等时变分概念(2)直观意义(求法):对于非稳定约束,在t 时刻将约束“冻结”,然后考察在约束允许情况下的可能位移,即视约束方程中的t 不变()0=t δ,对约束方程进行等时变分运算(同微分运算,注意)0=t δ即可得虚位移;对于稳定约束,由于约束方程中不显含t ,“冻结”已无实际意义,等时变分运算与微分运算完全相同。
Example 质点被限制在以等速u 匀速上升的水平面内运动,约束方程为 0=-ut z 0=z δ udt dz =(3)实位移是唯一的,虚位移可若干个;对稳定约束,实位移为若干个虚位移中的某一个;对非稳定约束,实位移与虚位移不一致。
见273p 图5.2-1二、理想约束实功-作用在质点上的力(含约束力i R )在实位移rd中所作的功 dW虚功-作用在质点上的力(含约束力i R )在任意虚位移rδ中所作的功 W δ其中 i R为第i 个质点受的约束力 若∑=⋅ii i r R 0δ体系所受诸约束反力在任意虚位移中所作元功之和等于零⇒理想约束例如 光滑曲面、曲线约束,刚性杆,不可伸长的绳索等刚性杆约束 022112111='+'-=⋅+⋅r f r f r f r f δδδδ (21f f-= 21f f =; 21r r '='δδ 刚性杆约束所允许) 由于引入了虚位移,巧妙的消取了约束反力(优点 亦是缺点)三、虚功原理(分析力学重要原理之一)(受约束力学体系的力学原理之一)体系受k 个几何约束,在主动力和约束力的共同作用下处于平衡状态,则其中每个质点均处于平衡状态,即 0=+i i R F (2,1=i ……)n 0=⋅+⋅ii i i r R r F δδ⇒对系统求和⇒0=⋅+⋅∑∑i i ii i ir R r Fδδ 对于理想约束∑=⋅ii i r R 0δ 则=W δ0=⋅∑i i ir Fδ∑=++ii iz i iy i ixz F y F x F)(δδδ 虚功原理⇒具有理想约束力学体系,其平衡的充要条件是所有主动力在任意虚位移中所作元功之和等于零 (1717 伯努利)说明:1、由=W δ0=⋅∑i i ir Fδ ,只能求出平衡条件,不能求出约束反力,欲求约束反力i R,需用拉格朗日未定乘数法2、运用虚功原理求平衡条件的方法步骤(1)确定系统自由度,选择合适的广义坐标;(2)将i r表示为广义坐标q的函数,并求出i rδ(i i i z y x δδδ,,);(3)由虚功原理列出平衡方程,并令αδq 的系数为零,求出平衡条件。
04-课件:6.2 虚功原理

原理
原理
力系平衡 位移相容
实 虚
实
虚位移原理
虚 虚力原理
u 变形体体系的虚功原理适用于所有变形体体系(二维板壳结构
和三维块体)
u 实际或虚设的力状态(内外力) 均应满足的静力平衡条件。
u 杆件结构的每一个杆件的位移状态 (实际或虚设)均应满足:①任一 微段满足应变~位移关系;②边界 位移满足约束边界条件。
Ø3、虚功原理的两种应用
虚位移原理
对于给定的力状态(实力状态), 另虚设一个位移状态(虚位移状 态),利用虚功方程来求解力状态
中的未知力
虚力原理
对于给定的位移状态(实位移 状态),另虚设一个力状态 (虚力状态),利用虚功方程 来求解位移状态中的位移
Ø4、变形体系虚功原理的几点说明
功 能 力与位移无关 虚功
u单位位移法
总结利用刚体体系的虚位移原理求解静定结构的支反力 和内力的求解步骤:单位位移法
①取实际力状态 :撤除与待求力相应约束,用约束力X 代替
②取虚位移状态:沿X正方向产生单位位移X=1;与荷载 F处对应位移记为P(由几何关系求得)
③列虚功方程:X.1+(F.P)=0 ④ X=-F.P
例3:一伸臂梁,支座A向下移动距离c1,求C点的竖向位移△。
A
c1
a
A
F RA F. b a
A
F RA b a
c
B
C
实位移状态
b
F
B
C
虚力状态
F 1
B
C
说明:①实位移状态:给 定的实际状态
②虚力状态:沿所求位移 方向假设一外力
③虚功方程:
F.
FR .c1
0
《结构力学虚功原理》课件

结构力学基础知识回顾
基本原理和概念
力学平衡 结构受力 静力学基础
结构材料性质
弹性模量 屈服强度 材料特性影响
重要概念
受力分析方法 结构行为预测 应力分布
应用案例
桥梁设计 建筑结构分析 机械系统
课程教学大纲
本课程将深入探讨结构力学虚功原理的相关概念和应用,通 过理论与实践相结合的教学方式,学生将学习如何应用虚功 原理分析结构系统的受力和稳定性,了解结构材料对结构行 为的影响,并掌握关键应用技能。每个章节都将侧重于实际 案例和工程应用,帮助学生更好地理解虚功原理在工程实践 中的价值。
01 体会和感悟
学生分享在学习虚功原理课程中的感悟和体会,探 讨学习过程中的成长和反思。
02 启示和帮助
虚功原理理论对实际工程实践的启示和帮助,激发 学生对工程领域的热情和探索欲望。
03 提升自己
鼓励学生在未来的学习和工作中持续努力,不断提 升自己的专业能力和素养。
未来发展趋势
发展趋势
展望结构力学虚功原理在未来 的发展趋势和应用前景,探讨 虚功原理理论的创新方向。
创新和应用
虚功原理在工程领域的不断创 新和应用,为工程领域的发展 提供新思路和方法。
实践探索
鼓励学生在未来的研究和实践 中积极探索虚功原理的新应用 领域,为工程领域的创新贡献 力量。
致谢
在此感谢所有支持和帮助过本课程的人,特别感激学生们的努力 和付出。继续学习,不断探索,为工程领域的发展贡献力量。
● 03
第3章 虚功原理理论基础
虚功原理概念
虚功原理是结构力学中重要的理论基础,通过对结构内部受力和 变形的分析,可以利用虚功原理推导出结构的稳定性和安全性。 学生需要深入理解虚功原理的概念,并认识到其在工程实践中的 重要性和应用价值。
虚功原理及其应用ppt课件

5
②虚功原理是分析力学的基本原理,仅对惯性系成立;
③理想约束 理想约束概念是分析力学的基本假设,是从客观实践中抽象
出来的。例如光滑约束,刚性约束等都是理想约束。 此假设不仅运用于静力学,对动力学同样成立。
④对于保守力学系统:
V V V
Fi
iV
N
( xi
i
yi
j zi
k)
W Fi ri
o
r
x
(2r cos 2 l cos )
2
y
mg
W Fi ri mg yD 0 i
Q
i
Fi
ri qk
Q mg(2r cos 2 l cos ) 2
2r cos 2 l cos
0
mg yD
mg
[(2r cos l )sin] 2
2
4(c2 2r 2 ) l
2r cos2 l cos 2
p1 A
p22((xBx23,,yyF2)3)
x2
l1
cos
1 2
l2
cos
y3 l1 sin l2 sin
23
由虚功原理
P1 x1 P2 x2 F y3 0
广义力Q1
1 2
P1l1
cos
P2l1
cos
Fl1
sin
1 2
P2l2
cos
Fl2
sin
0
tg P1 2P2
2F
tg P2
b、确定系统的自由度,选取合适的广义坐标,
c、并建用立广坐义标坐系标,表分示析力并作图用示点系的统有受用到坐的标所,有即主:动将力r;i 表示为广
义坐标qk (k=1,2,…s) 的函数,并求出:xi , yi , zi
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
NNP EA
ds
kQ QP GA
ds
3。荷载作用下位移计算的步骤:
⑴ 沿拟求位移的位置和方向虚设相应的单位荷载;
⑵ 由静力平衡条件,求出结构虚内力 N Q M
⑶ 由静力平衡条件,计算实际荷载下结构内力NQM
⑷ 代入如上公式,计算Δ。
4。各类结构的位移计算公式
● 梁和刚架
MM EI
AB段: M x , N 0 , Q 1 BC段: M l , N 1 , Q 0 3. 代入位移计算公式:
AV
MM P EI
ds
NNP EA
ds
kQ QP GA
ds
(续)
l 0
(x)
qx2 2
dx EI
l 0
(l)
ql 2 2
dx EI
l (1)(ql) dx
l
k (1)(qx)
dx
0
EI 0
GA
5 8
ql 4 EI
ql2 EA
kql2 2GA
5 8
ql 4 EI
1
8 5
I Al2
4 5
kEI GAl2
5
ql 4
1
2
h
2
2
E
h
2
8 EI 15 l 25 G l
(续)
5 8
ql 4 EI
1
1 750
1 500
其中,设 h/l =1/10,取G = 0.4E,k = 1.2
N sin
QP qx cos
Q cos
坐标变换:x Rsin , y R(1 cos ) , ds Rd
*例4. 试求图示简支梁在中点C的竖向位移Δ,并比
较 弯曲变形与剪切变形对位移的影响(梁的截面为
矩形:b×h)。
q
A x
C
B
l/2 l/2
P=1
A
B
xC
l/2 l/2
实际位移状态
虚拟力状态
P
ds
(仅取一项)
● 桁架
NNP EA
ds
NNP EA
l
●
组合结构
MM EI
P
ds(梁式杆)
NNP EA
l(链杆)
●拱
MM EI
P
ds
NNP EA
ds
● 微弯曲杆(同梁)
5。荷载作用下位移计算举例(积分法)
例1. 求刚架(折杆)自由端A点的竖向位移(挠度)
ΔAY(E、I、A=常数)。
q
B x
A x A
B
x
P=1 A x
l
C
C
l
实际状态(位移、变形)
虚拟状态(力)
解:
1. 逐杆建立坐标系,并分别写出实际状态
的各杆内力方程。
AB段:
MP
qx2 2
,
NP 0 ,
QP qx
BC段:
MP
ql 2 2
,
NP ql ,
QP 0
(续)
2. 在A点加一竖向单位荷载作为虚拟状态,并 写出该状态内力方程。
答案:
CV
5ql 4 384 EI
§9.5 图乘法 (维利沙金,1925)
一、图乘法的应用条件: ● 直杆 ● EI不变 ● 至少有一个直线弯矩图
(竖标 y0应取自直线图)
二、图乘法的计算公式
MM EI
P
ds
()
1 EI
Ay0
公式推导示意图
三、图乘法公式的推导
B M M P ds
A EI
结论:
⑴ 对于浅梁,轴力和剪力影响所占比重不大。
⑵ 轴力项和剪力项通常可略去,仅取弯矩项。
例2. 计算图示桁架下弦中点C的挠度。已知各杆弹
性模量 E 2.1108 kPa,截面面积 A 12cm2 。
思考:虚拟状态(单位荷载)的选取
求桁架如下位移: D点水平位移 DB间距改变 CD高差改变 CE杆转角 CD杆与CE杆相对转角(夹角DCE改变量)
凸抛物线:
S n hl n 1
,
xc
n 1 2(n 2)
l
(短)
凹抛物线:
1
1
S hl n 1
,
xc n 2 l
(短)
2. 折线分段图乘与变截面分段图乘
3. 复杂图形分块图乘(面积和形心位置难确定)
五、图乘法计算位移举例
• 实功原理求位移——能量法(功能原理) • 虚功原理——单位荷载法 • 线弹性体位移计算
应用条件(亦即叠加原理的应用条件): ⑴ 材料满足虎克定律 ⑵ 结构变形微小,不影响力的作用。
§9.2 虚功和虚功原理
● 虚功的概念(虚功不虚!)
力P与经历的位移Δ独立无关(无因果关系!) “虚功”区别于“实功”,并非不存在。
B Mi ( x)Mk ( x) ds 1
A
EI
EI
B
A Mi Mkdx
1 EI
B
A ( x tan )Mkdx
1 tan
EI
B
A xMkdx
1 EI
tan ( Ax0 )
1 EI
A( x0
tan )
1 EI A y0
( A 与 y0同侧为正、异侧为负)
四、图乘的分段和分块叠加
1. 常见图形的面积和形心
第九章
虚功原理
和
结构位移计算
§9.1 位移计算概述
1。位移计算的目的 • 验算结构的刚度(刚度条件、施工控制)
• 计算超静定结构(力法)
2。结构位移的分类 • 位移与变形(外因作用下)
• 刚体位移与形变位移 • 线位移:点沿直线移动;角位移:截面转动 • 广义力与广义位移
(续)
3。位移计算的原理与方法 • 积分法求挠曲线方程—— EIy M
例3. 图示为一等截面圆弧形曲杆AB,截面为矩形, 圆弧AB的圆心角为α,半径为R 。设沿水平线作用均 布荷载q,求B点的竖向位移。并比较剪切变形和轴 向变形对位移的影响。
实际 状态
虚拟 状态
(续)
忽略小曲率杆的曲率影响,仍用直杆位移公式。
实际荷载
虚拟荷载
MP
1 2
qx2
NP qxsin
M x
● 虚功原理(包含虚位移原理和虚力原理)
◆ 定义:外力所做的虚功等于外力产生的内力在 微段上所做的虚功之和。
◆ 虚功方程:外力虚功=内力虚功( We Wi )
◆ 虚位移原理 位移状态:可能的位移;力状态:真实的平衡力系。
(续)
● 虚力原理
位移状态:真实的位移(拟求); 力状态:虚拟的平衡力系(加单位荷载)。
● 微元分析(计算变形体内力虚功)
广义力:N、Q 、M ;广义位移:dλ、dη、dθ
广义虚力:N 、Q 、M
微元内力虚功: dWi Nd Q d Md
§9.3 单位荷载法及其位移计算公式
● 虚拟力——单位荷载(最简) P=1 或 M=1 或 广义单位力(成对)
● 总外力虚功: P Rc 总内力虚功:
● 位移计算的一般公式:
Nd Qd Md Rc
§9.4 荷载作用下的位移计算
1。假设材料是线弹性的(满足虎克定律)
轴向应变:
NP
,
d ds NP ds
EA
EA
平均切应变:
0
k
QP GA
,
d
0ds
k
QP GA
ds
弯曲应变:
M P , d ds M P ds
EI
EI
(续)
2。直杆在荷载作用下计算弹性位移一般公式: