基于隧道磁阻传感器的三维电子罗盘设计
地磁传感器_磁感应计_电子罗盘(compass)原理

内容MID中的传感器1加速计2陀螺仪3地磁传感器4MID中的传感器——已商用的传感器◆触摸屏◆摄像头◆麦克风(ST:MEMS microphones……)◆光线传感器◆温度传感器◆近距离传感器◆压力传感器(ALPS:MEMS气压传感器……)◆陀螺仪(MEMS)◆加速度传感器(MEMS)◆地磁传感器(MEMS)集成电路(Integrated Circuit,IC)把电子元件/电路/电路系统集成到硅片(或其它半导体材料)上。
微机械(Micro-Mechanics)把机械元件/机械结构集成到硅片(或其它半导体材料)上。
微机电系统(Micro Electro Mechanical Systems,MEMS)MEMS = 集成电路+ 微机械陀螺仪(Gyroscope)•测量角速度•可用于相机防抖、视频游戏动作感应、汽车电子稳定控制系统(防滑)加速度传感器(Accelerometer)•测量线加速度•可用于运动检测、振动检测、撞击检测、倾斜和倾角检测地磁传感器(Geomagnetic sensor)•测量磁场强度•可用于电子罗盘、GPS导航陀螺仪+加速计+地磁传感器•电子稳像(EIS: Electronic Image Stabilization)•光学稳像(OIS: Optical Image Stabilization)•“零触控”手势用户接口•行人导航器•运动感测游戏•现实增强1、陀螺仪(角速度传感器)厂商:欧美:ADI、ST、VTI、Invensense、sensordynamics、sensonor日本:EPSON、Panasonic、MuRata、konix 、Fujitsu、konix、SSS国产:深迪2、加速度传感器(G-sensor)厂商:欧美:ADI、Freescale、ST、VTI、Invensense、Sensordynamics、Silicon Designs 日本:konix、Bosch、MSI、Panasonic、北陆电气国产:MEMSIC(总部在美国)3、地磁传感器(电子罗盘)厂商:欧美:ADI、Honeywell日本:aichi、alps、AsahiKASEI、Yamaha国产:MEMSIC(总部在美国)MID中的传感器——IPhone4陀螺仪:ST,L3G4200D加速计:ST,LIS331DLH地磁传感器:AsahiKASEI,AK8975内容MID中的传感器1陀螺仪2加速计3地磁传感器4地磁传感器——背景知识地球的磁场象一个条形磁体一样由磁南极指向磁北极。
三维磁阻式电子罗盘的研制
摘
要:利用三轴磁阻传感器和两轴倾角传感器 研制三维磁 阻式 电子 罗盘。三轴磁阻传感 器 H 14 MC 03
测量 地 磁 场 的 3个分 量 , 角 传 感 器 S A 0 T测 量罗 盘 的 翻滚 角 和 俯仰 角 , 倾 C 10 2只传 感 器 的 信 号 经 过 电 路 处
理后传人单片机 中, 再通过 R -3 S2 2接 口输 入到计算机进 行计算处理 , 计算 机终端采用 V C编制 的界 面来
a d t n ta s t he t o utrtr ug heRS 2 it ra e Th o n he r n mi t m o a c mp e h o h t - 32 n ef c . e c mpue s s trha a VC r g a t r c s p o r m o p o e s t e a a n ds ly t e zmu h,rl a d ic a g e t r u h n ne a e h d t a d ipa h a i t ol n pth n ls h o g a i tr c .To ns r h e st iy f te f e u e t e s n ii t o h v ma ne i e itnc e o ,hss se h salw o rs t e e ic i. e c m p s Sa c a y o e a i t s g tcr ssa es ns r t i y tm a o p we e/rs tcr ut Th o a s’ c urc ft zmuh i h 0. 5。.nd t e ou in o h zmu s0. 。.
显 示 罗 盘 的 方位 角 和 翻 滚 、 仰 角 。 系统 采 用 了低 功 耗 的 置位 / 位 电路 来 保 证 磁 阻 传 感 器 的灵 敏 度 。最 俯 复 终 电子 罗 盘 的方 位 角 精 度 达 到 0 5 , 位 角 分 辨 率达 到 0 1 。 . 。方 . 。
三维磁阻式电子罗盘的设计与实现
A 3- ax e s magn e t O r e s i s t i V e e l e c t r on i c co m pa s s i n t h i s pa pe r whi ch c on s i s t s o f 3 D m a gn e t O r e s i s t i v e s e n s or HM C58 83 1 ,
3-a x es e l e ct r i ca l c ompas s a r e hi gh ac cu r a c y an d s t abl e o pe r a t i on .
K e y wo r d s : 3 - a x e s ma g n e t O r e s i s l i V e e l e c t r o n i c c o mp a s s , h e a d i n g a n g l e , e r r o r , e l l i p s e f i t t i n g
3 D a c c e l e r a t i o n s e n s o r AD X L 3 4 5 B a n d MCU L P C1 1 1 4 F B D4 8 f o r me a s u r i n g h e a d i n g a n g l e , p i t c h a n d r o l l a n g l e i n t h e p a r t o f t h e h a r d wa r e . S o u r c e s c a u s i n g e r r o r s a r e a n a l y z e d i n t h i s p a p e r , t h e n e l l i p s e f i t t i n g e r r o r c o mp e n s a t i o n me t h o d i s p r o — p o s e d f o r a v o i d i n g e r r o r t h a t a f e c t i n g me a s u r e me n t a c c u r a c y o f e l e c t r o n i c c o mp a s s i n t h e s o f t wa r e , c h a r a c t e r i s t i c s o f t h e
电子罗盘应用电路设计与调试
内置自检功能 低电压工作(2.16-3.6V)和超低功耗(100uA) 内置驱动电路 I2C数字接口 无引线封装结构 磁场范围广(+/-8Oe) 有相应软件及算法支持 最大输出频率可达160Hz
SCL VDD NC S1
3 设计过程
HMC5883L简介
霍尼韦尔 HMC5883L 是一种表面贴装的高集成模块,并带有数字接口的弱磁传感器芯 片,应用于低成本罗盘和磁场检测领域。HMC5883L 包括最先进的高分辨率HMC118X系 列磁阻传感器,并附带霍尼韦尔专利的集成电路包括放大器、自动消磁驱动器、偏差校 准、能使罗盘精度控制在1°~2°的12位模数转换器。
(2)电路调试 1. 使用+5V电源接入HMC5883L电子罗盘模块的J4接口,使用20P排线将 HMC5883L电子罗盘模块J2接口和智能显示终端的J2接口相连接起来,确认 无误之后,给模块上电,模块电路如图13.2所示。 2. 通过按键K1或K2选中电子罗盘实验,点击按键K5进入电子罗盘实验,可 以观察到智能显示终端上显示当前方向角。 3. 缓慢转动模块,观察智能显示终端上方向角的变化。
1. 任务描述 2. 器材准备 3. 设计过程 4. 电路调试
课程内容 Course Contents
1. 任务描述 2. 器材准备 3. 设计过程 4. 电路调试
1 任务描述任务描述 Nhomakorabea• 具体任务 1)掌握HMC5883L磁传感器结构及工作原理。 2)掌握电子罗盘应用电路的制作与调试方法。
• 任务要求 用HMC5883L测量当前方位角,并在智能显示终端上显示出来。
HMC5883L 采用霍尼韦尔各向异性磁阻(AMR)技术,这些各向异性传感器具有在轴向 高灵敏度和线性高精度的特点。传感器带有的对于正交轴低敏感度的固相结构能用于测 量地球磁场的方向和大小,其测量范围从毫高斯到 8 高斯(gauss)。
小型多旋翼无人机三轴电子罗盘设计与误差分析校准

小型多旋翼无人机三轴电子罗盘设计与误差分析校准1. 引言- 研究背景与意义- 本文的研究目的和内容2. 多旋翼无人机三轴电子罗盘设计- 电子罗盘原理- 三轴电子罗盘设计- 硬件选型和电路设计3. 误差分析与校准- 罗盘误差类型及原因分析- 罗盘校准方法介绍- 校准实验设计和实验结果分析4. 算法实现与测试- 姿态解算算法- 航向角解算算法- 算法测试方法和结果分析5. 结论与展望- 本文研究的主要成果和贡献- 在未来的发展和应用前景- 对改进和优化的建议和展望第1章:引言随着全球定位系统(GPS)的不断发展和普及,无人飞行器(UAV)技术也得到了快速发展。
多旋翼无人机作为一种轻型、灵活、易操控的无人机,逐渐成为了广大航模爱好者、科研工作者和商业应用者的心头好。
作为一种航空器,多旋翼无人机需要对其航向进行准确测量和控制,以便实现精准操控和自主导航等功能。
而电子罗盘作为一种精度较高的传感器,被广泛应用于航空领域中。
本文基于多旋翼无人机平台,研究了三轴电子罗盘的设计和误差校准方法,并对其航向角解算算法进行了实现和测试。
本研究的目的是提高多旋翼无人机的航向角测量精度,以满足其高精度定位和导航等应用需求。
本文的研究内容主要包括三个方面:(1)电子罗盘的设计和选型,包括硬件选型和电路设计等;(2)误差分析和校准方法的实验;(3)航向角解算算法的实现和测试。
通过这些方面的研究,本文将为多旋翼无人机的导航和控制等方面提供有益的参考和指导。
本文的结构按照如下方式组织。
第2章将详细介绍电子罗盘的原理和设计,包括其硬件选型和电路设计等方面的内容。
第3章将分析电子罗盘的误差类型及其原因,并介绍罗盘校准的方法。
第4章将讨论航向角解算算法的实现和测试方法。
第5章将回顾本文的主要研究成果和贡献,并对未来的发展和应用前景进行展望。
第2章:多旋翼无人机三轴电子罗盘设计2.1 电子罗盘原理电子罗盘是一种基于地球磁场原理的传感器,主要用于航空、船舶等领域中航向角的测量。
数字式电子罗盘毕业设计
毕业设计说明书数字式电子罗盘设计学生姓名:孔垂礼学号: ********** 学院:计算机与控制工程专业:电气工程及其自动化指导教师:***2015 年 06 月数字式电子罗盘设计摘要数字式电子罗盘具有很多优点,例如:体积比较小、启动非常迅速、功率损耗较低、制造成本低廉等,当今社会测控技术对测向传感器提出了非常高的要求;为了提高数字罗盘的测量精度,特意设计了一种基于HMC5883L三轴磁阻传感器[1]的数字电子罗盘;在分析相关类似产品的基础上,特别强调对电源、器件选型、信号调理电路、软件设计等方面进行了分析研究,设计出了数字罗盘并且研制了试验的样机;为验证设计效果,在双轴陀螺测试转台上进行了测试,试验结果初步验证了该设计方案的可行性;论文的研究工作可以为研究和改良数字式磁罗盘的测量准确度提供可靠的资料.关键词:地磁场,数字罗盘,HMC5883L三轴磁阻传感器,重力加速度计Here is the translation of your chinese paper’s titleAbstractDigital electronic compass, has small volume, quick start, low power consumption, and low cost, the modern measurement and control technology puts forward higher requirements on sensor of direction finding; In order to improve the precision of the digital compass, we design a HMC5883L triaxial magnetic resistance sensor based digital electronic compass; On the basis of the analysis of related products, focuses on the power supply, device selection, signal conditioning circuit and software design are analyzed in aspects of research, design the digital compass and test prototype was developed; To verify the design effect, on the two-axis gyro testing table was tested, experimental results verify the feasibility of the design scheme of; Thesis research work could be used to research and provide reference for improving the measuring accuracy of digital magnetic compass.Key words : Earth's magnetic field, digital compass, HMC5883L three-axis magnetic resistance sensor, the gravity accelerometer目录摘要 (2)Abstract (3)目录...........................................................................................................................................错误!未定义书签。
电子罗盘
分工
1、综述共同完成 2、原理图、PCB制作、元器件焊接将由边志耀完成。 3、电子罗盘的软件设计及编程将由方云完成。 4、电子罗盘设计完成后的参数确定、误差分析及计 算由高振负责。
数据采集模块
在传感器测量范围内,磁阻传感器输出的是 与磁场成正比的差分电压信号,在 5v 供电的情况 下产 生±30mv的偏置电压,因此可通过信号调理 电路把双极性的电压信号转换成单极性信号,同 时通过模 拟低通滤波,消除高频噪声,最终得到 0 一 5V 的电压范围。 AD7714 是一款高分辨率、低 噪声的24位∑一△A/D转换器,支持6路单端信号 输入满足5路信号的采集要求。
西北工业大学刘诗斌教授的博士学位论文应用磁 通门技术于无人机中并研制了原理样机,对实际 应用中的误差进行了智能补偿;其余国内的大部 分研究仍停留在利用Honeywell公司的磁阻传感器 来制作电子罗盘上,并对产生的误 差进行智能补 偿的阶段。因此可以说电子磁罗盘在国内还是有 很大的发展空间。
电子磁罗盘分类
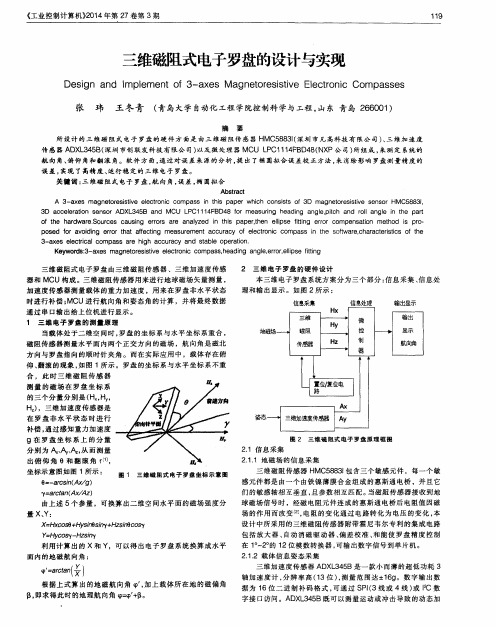
γ
HX HY HZ Z
磁北 Y β
HR-X=HXcosβ+HY sinβsinγ-HZ sinβcosγ; HR-Y=HX cosγ+HZ sinβ; 其中α 为航向角;β 为俯仰角;γ 为横滚角
两轴加速计测得的重力加速度为GX、GY已知当地 的重力加速度值为g,可得: β =arcsin(Gx/g) γ =arcsin(GY/g) α =arctan(HR-Y /HR-X)
主要元件的性能指标
HMC5883三轴磁阻传感器的性能指标: 1、数字量输出:I2C数字量输出接口,设计使用方便。 2、尺寸小:3x3x0.9mmLCC封装,适合大规模量产使用。 3、精度高:1-2度,内置12位A/D,OFFSET,SET/RESET 电路,不会出现磁饱和现象,不会有累加误差。 4、支持自动校准程序,简化使用步骤,终端产品使用 非常方便。 5、内置自测试电路,方便量产测试,无需增加额外昂 贵的测试设备。 6、功耗低:供电电压1.8V, 功耗睡眠模式--2.5微测量 模式--0.6mA。
浅析电子罗盘原理与误差分析

Hot-Point Perspective热点透视DCW151数字通信世界2019.07罗盘,在我国又被称为指南针,又名罗经仪,在近代主要用于航海,对于新大陆的发现和全球化运动发挥了重要作用。
然而在今天的工业和社会生活中,罗盘主要用来导航。
GPS 也也就是全球卫星定位系统,是目前使用最广的一种导航定位手段,但是它的信号经常被地形和地面的物体所阻挡,使得精度大幅度降低,特别是在植物茂密的森林和高楼林立的城市地区,GPS 信号的实用性仅有60%。
定位结果误差较大将导致设备无法正常工作。
电子罗盘是一种能探测航向角或其他的姿态的装备,该装备在日常生活中发挥着很重要的作用,它应用了地磁场和重力加速度电子罗盘结合GPS ,能有效弥补GPS 的缺陷,实现复杂地形环境下的精确定位导航。
因此,本文介绍了一种基于磁阻传感器HMC1022的电子罗盘的基本测量原理和误差分析。
1 地磁场简介和测量原理外源变化磁场、地核主磁场、感应磁场,以上四种磁场大体组成了地磁场。
地核主磁场所占的比重最大,百分比是95%;感应磁场以及外源变化磁场占的比重最少,仅仅只有1%;地核磁场所占的比重稍微比感应磁场多一些,高出3%,比重为4%。
我们可以设想地球内部存在一磁铁,磁铁的中心正好和地心相重合。
这样,无论在地球内部或是外部都存在许多的磁力线,在地球内部线从地球北极出发指向南极,在地球外部南极发出磁力线,最终都回到北极。
地磁场存在于三维空间内,是一个矢量场。
为了形容地磁场的散布特征,可以把观测点作为原点建立一个三维坐标系,该坐标系的三个轴x 、y 、z 轴的正向分别代表的方向是:地球的北方向、地球的东方向、在观测点处垂直向下的方向。
Z 、X 、Y 是三个磁场分量,Z 是垂直向下的,X 是指向北方向的、Y 是指向东方向的。
磁倾角、水平强度、磁偏角、总强度称为四要素,该四要素在地磁场的研究中发挥着不可替代的作用。
其中,I 表示磁倾角,该夹角存在于水平面与总矢量之间;H 是水平强度,它是地磁场的水平分量;D 表示磁偏角,存在于地球正北方向和H 之间。
TMR传感器的原理和特性以及其应用解析
TMR传感器的原理和特性以及其应用解析在美国拉斯维加斯举办的全球最大电子产品展览会“2018年消费类电子产品展销会(CES 2018)”的TDK和AKM的展台上发布了一款高精度3轴磁力计。
该磁力计将TDK公司开发的高度灵敏的隧道磁阻(TMR)元件与AKM公司设计的先进电子罗盘ASIC组合到一个小型LGA 11针封装内。
该新型TMR磁力计附在一块芯片上,微型尺寸仅为1.6毫米x 1.6毫米x 0.6毫米,而其特点是具有业内最低的RMS噪音,仅为40 nT-rms,且在在输出数据速率为100Hz时, 电流消耗亦非常低,仅为40 µA。
由于具有10 nT/LSB(最低有效位)的高灵敏度,该磁传感器可以非常精确地检测磁场内细小变化,从而能够在地球磁场或磁场发生器的帮助下高度准确地探测位置和方位。
这些独一无二的特点使得TMR磁力计适用于紧凑型电子设备上,例如:智能手机、平板电脑、游戏机控制器和各种各样的可穿戴设备,以及需要位置和方位精度高的其他应用,例如:虚拟现实、增强现实或混合现实(VR、AR和MR)或室内导航。
磁传感器磁传感器是种类繁多的传感器中的一种,它能够感知与磁现象有关的物理量的变化,并将其转变为电信号进行检测,从而直接或间接地探测磁场大小、方向、位移、角度、电流等物理信息,广泛应用于信息、电机、电力电子、能源管理、汽车、磁信息读写、工业自动控制及生物医学等领域。
随着科技进步和信息技术的发展,人们对磁传感器的尺寸、灵敏度、热稳定性及功耗等提出了越来越高的要求。
广泛应用的磁传感器主要是基于电磁感应原理、霍尔效应及磁电阻效应等。
其中基于磁电阻效应的传感器由于其高灵敏度、小体积、低功耗及易集成等特点正在取代传统的磁传感器。
目前市场上主要的磁传感器芯片是基于霍尔效应、各向异性磁电阻(AMR)和巨磁电阻(GMR)效应而开发的,而由于TMR磁传感器芯片拥有的小型化、低成本、低功耗、高度。
基于STM32的电子罗盘设计

24 23 22 21 20 19 18 13
12
14
2 200 pF
0.1 uF VCC 3.3
图 4 加速度传感器模块原理图 2.4 单片机最小系统电路图
主控电路采用 STM32F103RET6 单片机,其最小系统原 理图如图 5 所示。图中所示的 STM32F103RET6 单片机具有 较强的抗干扰能力,适合本系统设计 [7]。晶振为 8 MHz 的无 源晶振经单片机倍频后作为 72 MHz 的系统时钟,单片机为低 电平复位,但当复位引脚为低电平后,单片机不会马上复位, 还需要持续一段时间,故电容 C13 作为缓冲,从而维持一段时 间的低电平 [8]。BOOT0 为启动模式选择引脚,当为低电平时 为用户闪存启动模式,当为高电平时为系统内存启动模式,本 电路默认设置为闪存启动模式,当需要设置为系统内存启动
全面感知 Comprehensive Perception
基于STM32的电子罗盘设计
龚健颖,刘忠富,金健男,王 昊,许 斌
(大连民族大学 信息与通信工程学院,辽宁 大连 116600)
摘 要:目前,导航系统大多采用GPS导航,但GPS导航在偏远地带容易受到其他波段信号的干扰,有效信号不能完全返
中图分类号:TP39
文献标识码:A
文章编号:2095-1302(2015)12-0008-02
0引言 GPS 在导航定位、测速方面具有广泛的应用,但在高楼
密集的城区和偏远地带,GPS 信号受到阻挡,信号精度降低, 因而 GPS 设备不能很好的将信号回馈到卫星 [1]。针对这一问 题,可以采用电子罗盘和 GPS 组成导航定向,电子罗盘可以 对 GPS 进行有效的补偿 [2]。同时,随着科技的发展,电子罗 盘也可以安装在汽车或者轮船上,当驶入到信号较差的地方 时,数字电子罗盘可以起到很大的作用。
电子罗盘目标定位定向方法研究
电子罗盘目标定位定向方法研究作者:刘伟来源:《中国军转民》 2013年第2期刘伟近年来,通过获取的测量基准利用电子罗盘,开展远距离目标定向定位在相关行业的研究方兴未艾,随着技术日趋成熟,定向定位精度也在不断提高,其研究成果广泛应用到飞行器导航、军用测绘、卫星天线定向等领域,硬件已嵌入到便携式武器装备中。
如美国KVH公司的C100 系列磁通门电子罗盘、PNI 公司的TCM 系列三维电子罗盘、Honeywell 公司研制的HMR系列磁阻传感器电子罗盘等,其方位测量精度在倾斜45°时仍能达到0.5°以上。
国内对电子罗盘在不同领域的应用也开展了相应的深入研究,如西北某大学将磁通门技术应用于无人机项目;航空某所研制了三轴磁通门捷联式磁罗盘;深圳瑞芬公司的RION 系列电子罗盘,精度达到0.5°;中船总某所弱磁实验室研制的MC 系列电子罗盘已应用在测绘导航装备中。
本文通过分析电子罗盘的工作原理和应用特点,对电子罗盘在定向定位方面的推广应用提出了见解。
一、工作原理电子罗盘通常由三轴磁阻传感器,两轴倾斜传感器组成,并带有A/D 转换电路和微处理器。
图1 所示电子罗盘为倾角补偿电子罗盘,其输出的磁方位角不受载体倾斜的影响,分为传感器模块、信号调理采集模块以及主控制器模块。
三轴磁阻传感器正交安装,测量载体坐标系下地球磁场强度在三个坐标轴的分量HX、HY、HZ,倾角传感器通过敏感重力分量gX、gY 测量罗盘的俯仰角和滚动角,通过坐标转换可得到载体的磁方位角(计算方法见式7~9)。
二、电子罗盘应用特点在远距离目标定向定位中电子罗盘作为快速测量的传感器,主要利用其体积小、重量轻、功耗小、价格低、系统反应时间短,可嵌入到系统或设备内部的优势,与陀螺寻北仪相比,具有系统结构简单、可快速动态测量、抗震抗冲击性能好、架撤方便、动态漂移率低等较为明显的优势。
但是实际使用中,电子罗盘也存在着如下缺点:(1)定向精度低;(2)受外界磁场环境影响大;(3)磁偏角变化较大;(4)为了提高电子罗盘的测量精度,需要在测量前对其进行标定、校准,并对其圆周特性进行补偿等。
国内外电子罗盘的研究现状

本科毕业论文( 届)题目:基于STM32 ARM的嵌入式磁航向测量软件设计学院:_____________________________专业:_____________________________班级:_____________________________姓名:_____________________________学号:_____________________________指导老师:_____________________________完成日期:_____________________________物理与电子信息工程学院本科毕业设计(论文)诚信承诺书1、本人郑重地承诺所呈交的毕业设计(论文),是在指导教师老师的指导下严格按照学校和学院有关规定完成的。
2、本人在毕业论文(设计)中引用他人的观点和参考资料均加以注释和说明。
3、本人承诺在毕业论文(设计)选题和研究过程中没有抄袭他人研究成果和伪造相关数据等行为。
4、在毕业论文(设计)中对侵犯任何方面知识产权的行为,由本人承担相应的法律责任。
毕业论文(设计)作者签名:班级:学号:年月日目录摘要 (I)Abstract (II)1 引言 (1)1.1 课题背景与意义 (1)1.1.1 课题背景............................................................................. 错误!未定义书签。
1.1.2...课题意义................................................................. ........... 错误!未定义书签。
1.2磁阻传感器在导航系统中的应用. (4)1.31.4 本课题的主要研究内容 (4)1.5 论文组织结构 (5)2 论文模板使用说明 (7)2.1 标题的使用 (7)2.2 二级标题的使用 (9)2.3 图编号与引用 (10)2.3.2 图编号的引用 (10)2.3.3 引用编号的更新 (10)2.4 表格使用 (11)2.5 参考文献说明 (11)2.6 公式的使用 (12)3 xxx硬件设计 (13)3.1 方案论证 (13)3.1.1 常用方案比较 (13)3.2 本课题采用方案 (13)3.3 硬件仿真 (13)4 xxx软件设计 (14)4.1 软件设计框架 (14)4.2 算法分析与实现 (14)5 测试结果及分析 (15)6 结论与展望 (16)致谢 (17)参考文献 (18)附件1 程序代码 (19)摘要关键词4个左右,每个关键词用中文的分号“;”隔开,最后一个关键词不用分号。
TMR隧道磁阻传感器 详解TMR传感器的原理和特性
TMR隧道磁阻传感器详解TMR传感器的原理和特
性
在美国拉斯维加斯举办的全球最大电子产品展览会2018年消费类电子产品展销会(CES 2018)的TDK和AKM的展台上发布了一款高精度3轴磁力计。
该磁力计将TDK公司开发的高度灵敏的隧道磁阻(TMR)元件与AKM 公司设计的先进电子罗盘ASIC组合到一个小型LGA 11针封装内。
该新型TMR磁力计附在一块芯片上,微型尺寸仅为1.6毫米x 1.6毫米x 0.6毫米,而其特点是具有业内最低的RMS噪音,仅为40 nT-rms,且在在输出数据速率为100Hz时, 电流消耗亦非常低,仅为40 µA。
由于具有10 nT/LSB(最低有效位)的高灵敏度,该磁传感器可以非常精确地检测磁场内细小变化,从而能够在地球磁场或磁场发生器的帮助下高度准确地探测位置和方位。
这些独一无二的特点使得TMR磁力计适用于紧凑型电子设备上,例如:智能手机、平板电脑、游戏机控制器和各种各样的可穿戴设备,以及需要位置和方位精度高的其他应用,例如:虚拟现实、增强现实或混合现实(VR、AR和MR)或室内导航。
磁传感器。
三维磁阻式电子罗盘的设计与实现
三维磁阻式电子罗盘的设计与实现
张玮;王冬青
【期刊名称】《工业控制计算机》
【年(卷),期】2014(027)003
【摘要】所设计的三维磁阻式电子罗盘的硬件方面是由三维磁阻传感器
HMC58831(深圳市凡高科技有限公司)、三维加速度传感器ADXL345B(深圳市创联发科技有限公司)以及微处理器MCU LPC1114FBD48(NXP公司)所组成,来测定系统的航向角、俯仰角和翻滚角.软件方面,通过对误差来源的分析,提出了椭圆拟合误差校正方法,来消除影响罗盘测量精度的误差,实现了高精度、运行稳定的三维电子罗盘.
【总页数】2页(P119-120)
【作者】张玮;王冬青
【作者单位】青岛大学自动化工程学院控制科学与工程,山东青岛266001;青岛大学自动化工程学院控制科学与工程,山东青岛266001
【正文语种】中文
【相关文献】
1.基于隧道磁阻传感器的三维电子罗盘设计∗ [J], 王琪;李孟委;王增跃;蒋孝勇;李锡广
2.一种磁阻式电子罗盘测试和标定方法研究 [J], 陈瑜;张铁民;彭孝东
3.三维磁阻式电子罗盘的研制 [J], 朱荣华;林新华;孔德义;梅涛
4.微型磁阻式电子罗盘的设计及罗差补偿方法的研究 [J], 崔瑞芬;常佶
5.基于HMC1022磁阻传感器的数字电子罗盘的设计与实现 [J], 王丽颖;支炜;孙红霞;张伟
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于隧道磁阻传感器的三维电子罗盘设计∗王琪;李孟委;王增跃;蒋孝勇;李锡广【摘要】Existing electronic compass is vulnerable to be distracted by the Magnetic Field in external environment, which leads to low accuracy. To solve this problem,a three-dimensional electronic compass is designed based on Tunneling Magneto Resistance sensor and a prototype is made. The error characteristics of compass in a real envi-ronment is studied,and ellipse hypothesis are carried out to compensate the azimuth error after ellipsoid-fitting cor-rection. Through experimental tests,the compensation effect of the ellipse hypothesis method,which compensated az-imuth accuracy of up to 0.85° and effectively reducing 94.81% of the azimuth error. Experimental results show that applying TMR sensor to electronic compass is feasible.%针对现有电子罗盘在地磁场检测时易受到外界磁场干扰而导致测量精度不高的问题,设计了基于隧道磁阻传感器( TMR)的三维电子罗盘并完成样机制作。
研究了实际环境中电子罗盘的误差特性,经椭球拟合校正后,采用基于椭圆假设的椭圆拟合方法对误差进行补偿,补偿后其方位角精度可达0.85°,有效降低94.81%的方位角误差。
实验结果验证了TMR传感器在电子罗盘应用的可行性。
【期刊名称】《传感技术学报》【年(卷),期】2015(000)006【总页数】5页(P895-899)【关键词】电子罗盘;隧道磁阻传感器;罗差补偿;椭圆拟合【作者】王琪;李孟委;王增跃;蒋孝勇;李锡广【作者单位】中北大学电子测试技术国家重点实验室,太原030051; 中北大学微系统集成研究中心,太原030051;中北大学电子测试技术国家重点实验室,太原030051; 中北大学微系统集成研究中心,太原030051;中北大学电子测试技术国家重点实验室,太原030051; 中北大学微系统集成研究中心,太原030051;中北大学电子测试技术国家重点实验室,太原030051; 中北大学微系统集成研究中心,太原030051;中北大学电子测试技术国家重点实验室,太原030051; 中北大学微系统集成研究中心,太原030051【正文语种】中文【中图分类】TP212电子罗盘通过采集地磁场强度信号实现方位角检测,由于其成本低、灵活性好、无累积误差等特点,可用于校正陀螺的累积误差,为传统自主导航系统提供稳定精确的航向角,广泛应用于定向导航领域,如陀螺寻北仪的粗寻北[1]、捷联惯导初始对准[2]等。
目前,国外已成功将电子罗盘用于车载导航等领域,而国内很多单位正在开展对电子罗盘的相关研究,并且取得不错的成果。
其中对各向异性磁阻传感器(AMR)的电子罗盘研究较多,郑州大学刘武发[3]和南京航空航天大学杨新勇[4]设计的基于AMR传感器的三维电子罗盘航向精度分别为0.6°和0.8°,但AMR传感器灵敏度偏低,且需置位/复位电路消除磁滞,使得电路复杂,不利于微小型化和降低成本;巨磁阻(GMR)传感器较AMR灵敏度偏高,中国科学院物理研究所的汤玉林[5],杭州电子科技大学的林乾浩[6]制作的基于GMR的三维电子罗盘精度为1°。
但其信号强度较弱、信噪比低决定了基于GMR传感器的电子罗盘的精度提升空间不大。
隧道磁阻传感器(TMR)较之AMR和GMR传感器,有良好的温度稳定性,较高的灵敏度,更宽的线性范围,更低的功耗,因此本文拟基于TMR传感器开发出较高精度的电子罗盘。
隧道磁电阻效应(Tunneling Magneto Resistance,TMR)是指在外磁场变化时,某些磁性材料隧道结出现非常大的电阻变化的现象。
TMR效应室温下磁阻变化率可达1056%[7],因此TMR传感器灵敏度极高,可用于弱磁场检测。
TMR还具有功耗低、频响高等特点,适用于制作小型化高精度电子罗盘。
地磁场近似的可看为是一个棒状磁场,磁场分布由N极指向S级,在北半球地磁场倾斜指向下,如图1所示,地磁场的总矢量可分解为与地球表面平行的水平磁场分量Ho及与之垂直的磁场分量Hz,Ho与地磁场矢量的夹角称为磁倾角,Ho始终指向磁北方向,因此,通过对地磁水平分量的测量可以实现方位角的测量,这是电子罗盘设计的理论基础[8]。
Ho为两个正交水平放置的磁阻传感器测得的地磁场信号HX、HY的矢量和,其中,HX逆时针旋转至Ho的过程即为寻北的过程,该过程中HX划过的角度即为方位角。
由图1有:反正切值域(-90°~90°),方位角范围(0~360°),因此:磁北方向与真北方向的夹角称为磁偏角D,当磁北方向实际偏东时,地磁偏角为正,反之为负。
因此真实的方位角可计算为:方位角φ的测量是建立在电子罗盘所在载体坐标系与地理坐标系重合的基础上,而当电子罗盘系统所在平面与水平面不一致时,如图2所示,磁阻传感器的测量值无法直接表示Ho的两个水平分量,因此需要坐标变换,将磁传感器的测得的载体坐标系三轴上的分量换算到地理坐标系中[9-11]。
根据选取的载体坐标系“北东天”,该坐标系绕Y轴旋转θ,再绕X轴旋转γ,即还原到地理坐标系中,该过程可由以下公式描述:其中,Hx、Hy、Hz为磁阻传感器测得的地磁场在载体坐标系上各轴上的分量,而HX、HY、HZ为地磁场在地理坐标系中的分量。
θ为俯仰角,为绕Y轴旋转时,X轴转过的角度。
γ为横滚角,为绕X轴旋转时,Y轴转过的角度,如图3所示,俯仰角与横滚角可通过三轴加速度计感测重力场后通过解算得到,具体计算方法如下:可得:将此公式带入式(2)、式(3)中,可得到真实的方位角。
根据电子罗盘的测量原理,TMR传感器测得地磁场在载体坐标系中的磁场分量,加速度计敏感地球重力场信息,求得载体的姿态角。
通过对两者信息的融合,完成磁场测量值从载体坐标系到地理坐标系的校正过程,校正后的地磁信息可进行方位角的解算,以此实现电子罗盘的基本功能。
电子罗盘由信息获取、信号调理、信息处理、数据输出4个模块组成,如图4所示。
TMR传感器与加速度计分别获取地磁与姿态信息,输出电压信号经过信号调理之后,送入微处理器中进行实时姿态计算、坐标变换、系统误差补偿,得到载体的姿态参数,将它们通过串口在上位机实时输出显示[12]。
2.1 硬件设计传感器是整个电子罗盘的前端,只有对地磁场的准确采集,才能保证系统正常工作。
地磁场0.400 Gauss~0.625 Gauss磁场强度较弱,对硬件设计提出很高的要求。
出于以上考虑,TMR传感器选择为MMLP44F,灵敏度为9 mV/V/Oe,输出与磁场强度成正比的电压信号,低功耗,差分输出,有良好的温度稳定性,可用于地磁检测。
作为地磁场信息的校正器件,加速度计的精度也必须有一定的保证。
通过对性能、体积等多方面的考虑,选择14位数字输出,低噪声(99 ),高精度的三轴加速度计MMA8451Q。
由于MMLP44F的输出为惠斯通电桥输出,无缓冲,驱动能力较弱,因此,后端放大电路中采用适合对弱驱动的传感信号进行放大的仪表放大器。
AD623是一款低噪声、高精度、高输入阻抗的仪表放大器,放大倍数可由外接电阻RG直接调节。
AD623的输出电压为:选择AD623的共模电压VREF为2.048 V,根据磁阻传感器的输出电压范围(±128 mV)及放大器电压输出范围(0~5 V)以及后续ADC电路的输入电压范围(0~4.096 V),求得放大倍数G为:为满足实际电路的需要,充分考虑到电路中的偏置电压、温漂和外界磁场干扰等因素,为留有裕量,将放大倍数选择为11,计算反馈电阻值为:模数转换模块选择四通道16位的电荷再分配逐次逼近型模数转换器AD7689,其有效位数可达15.039,内部集成SPI接口用于内部寄存器配置和转换结果的发送。
信号调理硬件电路图如图5所示。
微处理器选用ST公司的STM32F103C8T6,该芯片基于Cortex-M3内核架构,处理速度快,低功耗、高性能、集成丰富的片上外设。
其主要工作是控制ADC对磁场数据进行采集和处理,根据重力加速度值计算倾角,补偿系统误差,对电子罗盘方位角解算并按特定的协议发送数据及上位机实时显示等。
系统采用RS232总线与上位机通信,相关电平转换采用SP3232芯片。
2.2 软件设计基于KEIL MDK开发环境,使用C语言编写进行软件部分设计,主要分为校正和测试两部分,其中包括数据采集及处理、误差补偿、方位角计算等,程序流程图如图6所示。
电子罗盘的误差主要来源为安装误差、制造误差及罗差。
制造误差可通过椭球拟合法进行校正,而罗差是电子罗盘系统测量方位角时所特有的一种误差,对电子罗盘测量精度的影响也最为复杂。
电子罗盘周围存在的磁性物质或者会对磁场强度产生影响的物质,使得磁阻传感器测得的地球磁场发生偏差。
干扰磁场可以分为矫顽力较大的铁磁物质和电气设备等产生的硬铁磁场和由矫顽力较小的铁磁物质受周围铁磁物质的影响后产生的软铁磁场。
干扰磁场对电子罗盘测量结果产生的误差称为罗差。
硬铁磁场表现为附加在载体坐标系X、Y、Z方向上的一个固定的偏移量。
而软磁磁场随着电子罗盘的方位变化,其大小和方向均发生改变[13-14]。
罗差补偿算法有多种[15-17],其中基于椭圆假设的补偿算法是根据Michel Moulin 等提出的假设,在无外界磁场的干扰下,X、Y轴磁阻传感器的输出可构成一个标准圆,但是周围环境的干扰磁场会使圆发生变形甚至扭曲成一个椭圆。
因此将罗差补偿抽象为求取使椭圆变形的各项误差系数的过程[18-19]。
实验中,将样机固定在无磁转台上进行实验测试。
无磁转台保持水平,首先对电子罗盘样机进行旋转,使其姿态位置尽量覆盖拟合椭球所在三维空间范围,完成椭球拟合校正,经MATLAB计算得到制造误差的相关误差参数,完成加速度计和磁阻传感器的校正[20-22]。