台达VFD通讯示例
台达VFD M变频器通信协议参数定义
H210C P65×H的High Word【小数二位】
H210D 变频器温度【小数一位】
H210E PID回授信号【小数二位】
H210F PID目标值【小数二位】
H2110 变频器机种识别
地址定义
由0064H来表示 B2 0
保留:均为0
B1
B0
0
cpu或模拟电路有问题CF3
19
09
硬件数字保护线路有问题HPF
20
10
加速中过电流OCA
H2101
频率命令
B11
B10
B9
B8 B7~B5 B4
B3
1
1
1
1
0
REV FWD
参数锁定 运转指令 主频率来 主频率来
有通信界 源由模拟 源由通信
面
信号输入 界面
保留
LED状态:1亮 0暗
参数地址 功能说明 参数地址 功能说明
H2104 输出电流(A)【小数一位】
H2105 DC-BUS电压(U)【小数一位】
H2106 输出电压(E)【小数一位】
H2107 多段速指令目前执行的段速(step)
H2108 程序运转该段速剩余时间(sec)
H2109 外部TRIGER的内容值(count)
H210A 功因角度对应值【小数一位】
0
无功能
0
1
停止
1
0
启动
1
1
JOG启动
B2
B1
B0
0
1
1
Reset E.F ON
减速中过电流OCD 恒速中过电流OCN
对地短路GFF 低电压LV 保留
台达变频器VFD-USB01 RS-485_USB通讯转换器模块
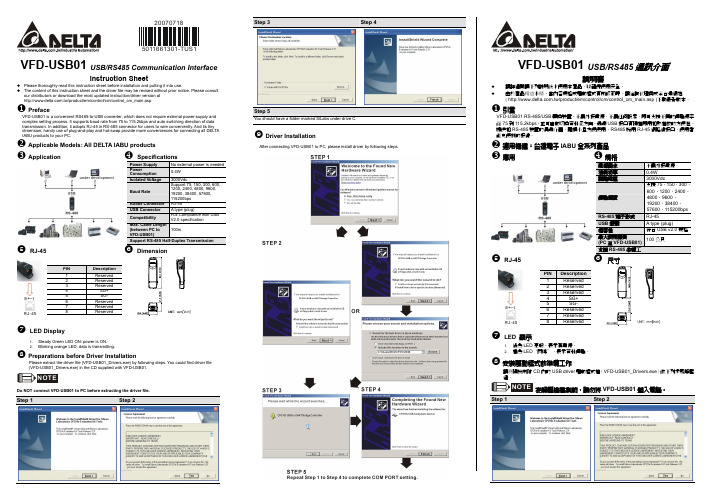
5011661301-TUS120070718VFD-USB01 USB/RS485 Communication InterfaceInstruction SheetPlease thoroughly read this instruction sheet before installation and putting it into use.The content of this instruction sheet and the driver file may be revised without prior notice. Please consult our distributors or download the most updated instruction/driver version at/product/em/control/cm/control_cm_main.aspX PrefaceVFD-USB01 is a convenient RS485-to-USB converter, which does not require external power-supply and complex setting process. It supports baud rate from 75 to 115.2kbps and auto switching direction of data transmission. In addition, it adopts RJ-45 in RS-485 connector for users to wire conveniently. And its tiny dimension, handy use of plug-and-play and hot-swap provide more conveniences for connecting all DELTA IABU products to your PC.Y Applicable Models: All DELTA IABU productsZ Application[SpecificationsPower Supply No external power is neededPowerConsumption0.4WIsolated Voltage 3000VdcBaud RateSupport 75, 150, 300, 600,1200, 2400, 4800, 9600,19200, 38400, 57600,115200bpsRS485 Connector RJ-45USB Connector A type (plug)CompatibilityFull Compliance with USBV2.0 specificationMax. Cable Length(between PC toVFD-USB01)100mSupport RS-485 Half-Duplex Transmission\RJ-45 DimensionPIN Description1 Reserved2 Reserved3 Reserved4 SG+5 SG-6 Reserved7 Reserved8 Reserved^ LED Display1. Steady Green LED ON: power is ON.2. Blinking orange LED: data is transmitting._Preparations before Driver InstallationPlease extract the driver file (VFD-USB01_Drivers.exe) by following steps. You could find driver file(VFD-USB01_Drivers.exe) in the CD supplied with VFD-USB01.Do NOT connect VFD-USB01 to PC before extracting the driver file.Step 1Step 2Step 3Step 4Step 5You should have a folder marked SiLabs under drive C.`Driver InstallationAfter connecting VFD-USB01 to PC, please install driver by following steps.VFD-USB01 USB/RS485通訊介面說明書請詳細閱讀下列說明後才使用本產品,以確保使用安全。
台达CANopen现场总线产品通讯整合应用实例
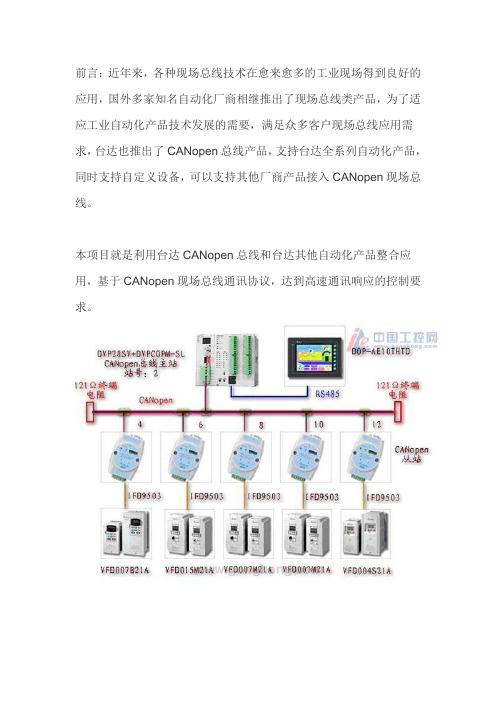
前言:近年来,各种现场总线技术在愈来愈多的工业现场得到良好的应用,国外多家知名自动化厂商相继推出了现场总线类产品,为了适应工业自动化产品技术发展的需要,满足众多客户现场总线应用需求,台达也推出了CANopen总线产品,支持台达全系列自动化产品,同时支持自定义设备,可以支持其他厂商产品接入CANopen现场总线。
本项目就是利用台达CANopen总线和台达其他自动化产品整合应用,基于CANopen现场总线通讯协议,达到高速通讯响应的控制要求。
控制系统技术方案配置:详见下表序号元件名称型号规格数量(台)备注1人机界面DOP-AE10THTD110.4”2PLC主机DVP28SV11R116K Step3CANopen主站DVPCOPM-SL1SV左侧高速扩展4CANopen从站IFD95035CANopen/Modbus5变频器VFD007B21A750W,单相220V6变频器VFD007M21A3750W,单相220V7变频器VFD004S21A1400W,单相220V上述表格仅列举出技术方案主要元器件,此外还包括121Ω终端电阻以及其他通讯连接电缆等辅助器件,此处均不予赘述。
控制系统原理框图简要介绍:采用CANopen现场总线作为通讯介质,主要为了实现多从站大量数据高速通信响应和提高通讯稳定性,和传统Modbus通讯协议比较,CANopen总线通讯协议有质的飞跃,数据通讯不再受到Modbus轮询方式的制约,大大提高了主从站之间的大量数据通讯响应速度和稳定性。
人机界面通过RS485和主站28SV PLC连接,28SV左侧高速并行接口连接CANopen总线主站模块DVPCOPM-SL,5台CANopen 总线从站模块IFD9503分别连接5台台达变频器,系统实现人机输入频率和启停命令,实时显示变频器输出频率、电流、电压等参数数值。
控制系统原理框图:人机界面画面如下:人机界面可以实现:分别设定5台变频器给定频率和启动、停止运转信号;可以分别显示5台变频器运行参数数据,包括输出频率、输出电流、输出电压等等。
永宏PLC与台达VFD-B系列通讯
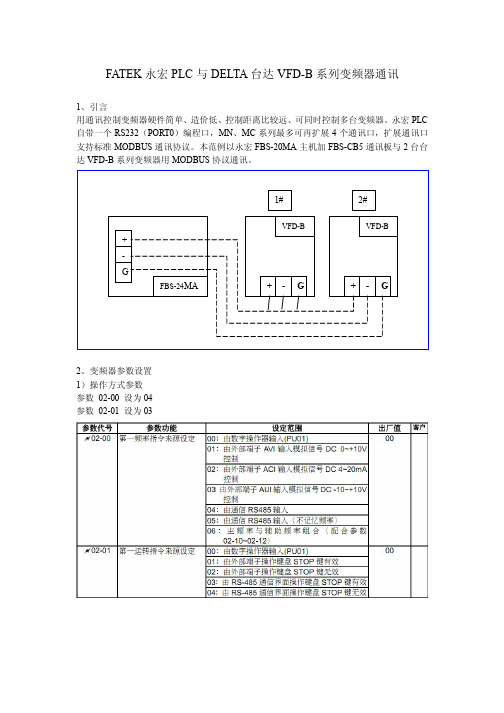
FATEK永宏PLC与DELTA台达VFD-B系列变频器通讯1、引言用通讯控制变频器硬件简单、造价低、控制距离比较远、可同时控制多台变频器。
永宏PLC 自带一个RS232(PORT0)编程口,MN、MC系列最多可再扩展4个通讯口,扩展通讯口支持标准MODBUS通讯协议。
本范例以永宏FBS-20MA主机加FBS-CB5通讯板与2台台达VFD-B系列变频器用MODBUS协议通讯。
2、变频器参数设置1)操作方式参数参数02-00 设为04参数02-01 设为032)通讯参数设定参数09-00 设为1# = 01、2# = 02参数09-01 设为01 Baud rate 9600(传输速度,位∕秒)参数09-02 设为01警告并减速停车参数09-03 设为0.0无传输超时检出参数09-04 设为04 8,E,1 for RTU3、PLC通讯参数设定FBS-CB2占用PORT2通讯参数设定要与变频器一致通讯协议设为Modbus(Slave)4、程序说明1)使用150P.M-BUS指令2)1#变频器停止、正转、反转控制3)2#变频器停止、正转、反转控制4)监视页实时监视数据5)暂存器地址注解R0 1#运行指令R10 2#运行指令R1 1#频率设定R11 2#频率设定R2 1#加速时间R12 2#加速时间R3 1#减速时间R13 2#减速时间R4 1#输出频率R14 2#输出频率R5 1#输出电流R15 2#输出电流6)MODBUS表格设定光标移到151P.M-BUS指令点“Z”键调出通讯表格7)MODBUS地址定义如:频率命令地址是2001H,2001H转为十进制为8193,40001+8193=48194则频率命令MODBUS地址为48194。
驱动器内部参数地址定义:如:加速时间地址是01-09,1019H转为十进制为265,40001+265=40266 则加减速时间设定MODBUS地址为40266。
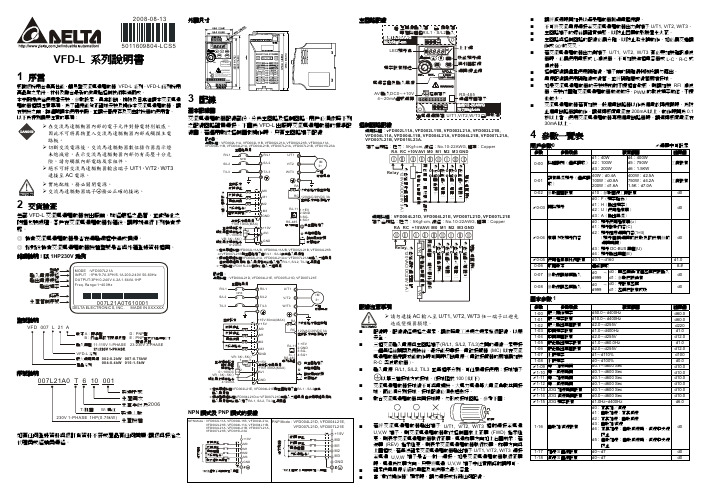
台达变频器说明书VFD-M变频器说明书

0.4 kW (0.5HP) 230V / 1-phase 0.4 kW (0.5HP) 230V / 3-phase 0.75 kW (1HP) 230V / 1-phase 0.75 kW (1HP) 230V / 3-phase 1.50 kW (2HP) 230V / 1-phase 1.50 kW (2HP) 230V / 3-phase
出廠設定為輸出頻率
RJ-11 1:15V
1
為主回路端子
ACI GND
RS-485 串列通信
6←1
2:GND 3:SG4:SG+ 5:NC 6:通 訊 使 用
為控制回路
*若為 單相機 種則主 回路 端子可 任選2個端 子作為 輸入電 源端
請使用有被覆的隔離線 *單 相 機 種 可 輸 入 三 相 電 源
VFD 007 M 23 A
版本
輸入電壓
序號說明
VFD-M 系列
最大適用馬達
004:0.5HP(0.4kW)
015:2HP(1.5kW) 037:5HP(3.7kW) 075:10HP(7.5kW)
007:1HP(0.75kW) 022:3HP(2.2kW) 055:7.5HP(5.5kW)
產品系列
第一章 交貨檢查
VFD-M 系列
第
每部 VFD-M 變頻器在出廠前,均經嚴格之品管,並做強化之防撞包裝處理。客戶在變頻器拆箱 一
後,請即刻進行下列檢查步驟。
章
檢查變頻器是否在運輸過程中造成損傷。 拆封後檢查變頻器機種型號是否與外箱登錄資料相同。
台达VFD-M变频器通信协议参数定义
H210C P65×H的High Word【小数二位】
H210D 变频器温度【小数一位】
H210E PID回授信号【小数二位】
H210F PID目标值【小数二位】
H2110 变频器机种识别
地址定义
由0064H来表示 B2 0
保留:均为0
B1
B0
0
0
0
0
0
无功能
0
1
正向
保留:均为0
1
0
反向
保留:均为0
1
1
改变方向
H2001
频率命令
H2002
B15
~
0
~
保留:均为0
H2100
错误码
00
无异常
11
01
过电流OC
12
02
过电压OV
13
03
过热OH
14
04
驱动器过负载OL
15
05
电机过负载OL1
16
06
外部异常EF
17
07
cpu写入有问题CF1
18
08
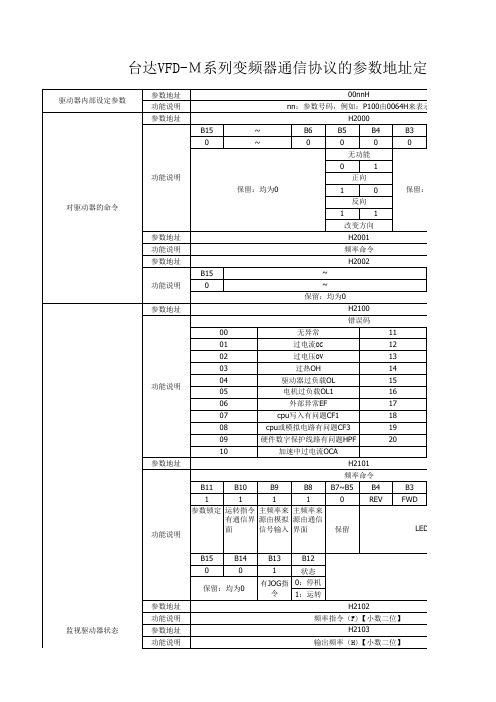
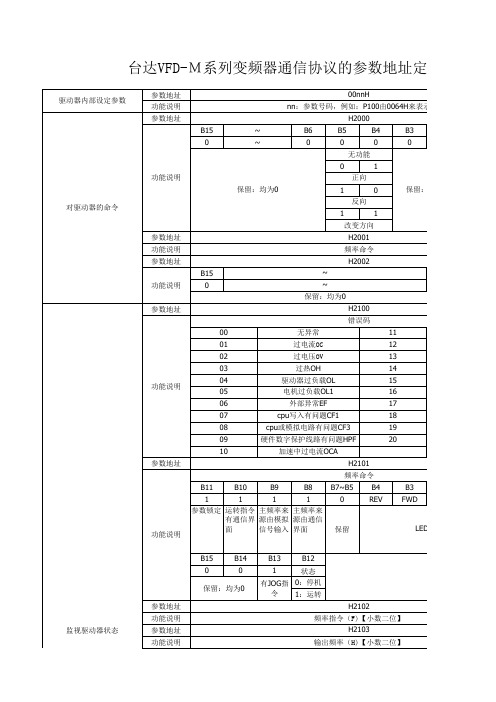
台达VFD-M系列变频器通信协议的参数地址定义
驱动器内部设定参数 对驱动器的命令
监视驱动器状态
参数地址 功能说明 参数地址
功能说明
参数地址 功能说明 参数地址 功能说明 参数地址功能Biblioteka 明参数地址功能说明
00nnH nn:参数号码,例如:P100由0064H来表示
H2000
B15
~
B6
B5
B4
B3
0
~
B15
B14
台达变频器说明书VFD-F[2]
![台达变频器说明书VFD-F[2]](https://img.taocdn.com/s3/m/c54ec44230b765ce0508763231126edb6f1a76cb.png)
台达变频器说明书VFD-F====================第一章产品概述------------输出频率范围为0.1~600Hz,可满足不同应用的需求。
可调V/f曲线和矢量控制模式,可根据负载特性提供适当的电流电压矢量值,实现高效率和高精度的控制。
内置PID回馈控制功能,可实现对温度、压力、流量等物理量的闭环控制。
内置多种保护功能,如过电流、过压、欠压、过热、过载、短路等,可有效保护变频器和机电的安全。
内置Modbus通讯协议(RS-485接口),波特率可达38400bps,可实现与上位机或者其他设备的数据交换。
支持多种现场总线通讯模块,如DN-02(DeviceNet)、LN-01(LonWorks)、PD-01(Profibus-DP)等,可实现与不同网络系统的兼容。
可选配多种附件,如制动单元、制动电阻、直流电抗器、PG卡、L CD操作面板等,以扩展变频器的功能和性能。
采用模块化设计,结构紧凑,安装方便,散热效果良好。
台达变频器VFD-F系列合用于各种工业领域,如风机、水泵、机床、纺织机械、塑料机械、起重机械、化工机械等。
第二章型号说明------------VFD F XXX XX X其中:VFD表示交流机电驱动器(Variable Frequency Drive)。
F表示通用型(General Purpose)。
XXX表示最大合用马力(HP),如055表示7.5HP(5.5kW)。
XX表示输入电压等级(V),如43表示380~480V三相输入。
X表示版本号(A或者B),如A表示标准版。
例如:VFD-F-055F43A表示一款7.5HP(5.5kW),380~480V三相输入,标准版的通用型交流机电驱动器。
第三章技术规格------------台达变频器VFD-F系列的技术规格如下表所示:---项目 ---规格 -------:-----:---------输入电压 ---200~240V单相或者三相;380~480V三相 -------输入频率 ---50/60Hz -------输出电压 ---0~输入电压 -------输出频率 ---0.1~600Hz -------输出功率 ---0.75~160kW -------输出电流 ---2.5~300A -------控制方式 ---V/f控制或者矢量控制 -------调速范围 ---1:100(V/f控制);1:1000(矢量控制) -------速度精度 ---±0.01%(矢量控制) -------转矩特性 ---150%的额定转矩(1Hz时) -------转矩响应 ---<5ms(矢量控制) -------转矩限制 ---可设定0~150%的额定转矩 -------转矩提升 ---可设定0~15%的额定转矩 -------转矩补偿 ---可设定0~30%的额定转矩 -------PID控制 ---内置PID回馈控制功能,可设定正反馈或者负反馈 -------多段速度控制 ---可设定16段默认速度或者15段可编程运行 -------加减速时间 ---可设定0.1~3600秒的加减速时间 -------制动功能 ---可选配制动单元和制动电阻,实现快速停机或者负载下降 -------DC制动功能 ---可设定DC制动频率、电压和时间,实现低速或者停机时的稳定 -------JOG功能 ---可设定JOG运行频率、加减速时间和方向,实现点动操作 -------自动重启功能 ---可设定自动重启次数和时间,实现断电后的自动恢复运行 ----台达变频器说明书VFD-F一、产品简介二、产品特点输出频率范围:0.5~600Hz可调V/f曲线和矢量控制模式内置PID回馈控制功能内置制动单元和直流电抗器(部份型号)内置Modbus(RS-485)通讯接口,波特率可达38400bps支持DN-02、LN-01、PD-01等现场总线通讯模块支持多种控制信号输入输出,如摹拟量、数字量、脉冲量等支持16段可编程速度运行和15段可编程加减速时间支持S曲线加减速功能,减少冲击和振动支持自动转矩增强和滑差补偿功能支持机电参数自动识别功能支持散热器温度检测功能支持多种故障检测和保护功能,如过载、过压、欠压、过流、短路、过热、缺相、欠载等支持多种故障记录和查询功能,如最近10次故障代码和时间等支持多种参数复位和锁定功能,如全部复位、部份复位、用户自定义复位等支持多种参数备份和恢复功能,如EEPROM备份、EEPROM恢复等三、产品规格---型号 ---额定电压 ---额定电流 ---额定功率 ---最大適用馬達 ---------------------VFD007F23A ---1PH 200~240V 50/60Hz ---5.0A ---1.1kVA ---0.75HP (0.55kW) -------VFD015F23A ---1PH 200~240V 50/60Hz ---7.5A ---1.8kVA ---2HP (1.5kW) -------VFD022F23A ---1PH 200~240V 50/60Hz ---10A ---2.3kVA ---3HP (2.2kW) -------VFD037F23A ---1PH 200~240V 50/60Hz ---16A ---3.7kVA ---5HP (3.7kW) -------VFD007F43A ---3PH 380~480V 50/60Hz ---2.5A ---1.5kVA ---1HP (0.75kW) -------VFD015F43A ---3PH 380~480V 50/60Hz ---4.0A ---2.5kVA ---2HP (1.5kW) -------VFD022F43A ---3PH 380~480V 50/60Hz ---5.0A ---3.0kVA ---3HP (2.2kW) -------VFD037F43A ---3PH 380~480V 50/60Hz ---7.5A ---4.5kVA ---5HP (3.7kW) -------VFD055F43A ---3PH 380~480V 50/60Hz ---11A ---6.6kVA ---7.5HP (5.5kW) -------VFD075F43A ---3PH 380~480V 50/60Hz ---14A ---8.4kVA ---10HP (7.5kW) -------VFD110F43A -------型号 ---额定电压 ---额定电流 ---额定功率 ---最大適用馬達 ---------------------VFD110F43A ---3PH 380~480V 50/60Hz ---19A ---11.4kVA ---15HP (11kW) -------VFD150F43A ---3PH 380~480V 50/60Hz ---25A ---15kVA ---20HP (15kW) -------VFD185F43A ---3PH 380~480V 50/60Hz ---32A ----19.2kVA----25HP(18.5kW)-------VFD220F43A----3PH380~480V50/60Hz----38A----22.8kVA----30HP(22kW)-------VFD300F43A----3PH380~480V50/60Hz----48A----28.8kVA----40HP(30kW)-------VFD370F43A----3PH380~480V50/60Hz----58A----34.8kVA----50HP(37kW)-------VFD450F43A----3PH380~480V50/60Hz----70A----42kVA----60HP(45kW)-------VFD550F43A----3PH380~480V50/60Hz----86A----51.6kVA----75HP(55kW)-------VFD750F43A----3PH380~480V50/60Hz----113A----67.8kVA----100HP(75kW)-------VFD900F43A----3PH380~480V50/60Hz----135A----81kVA----120HP(90kW)----四、产品安装检查交货内容,确认变频器型号、规格、数量等与定单一致,检查变频器外观是否有损坏或者缺陷,如有问题,请及时与供应商连系。
台达变频器与海为PLC通讯控制
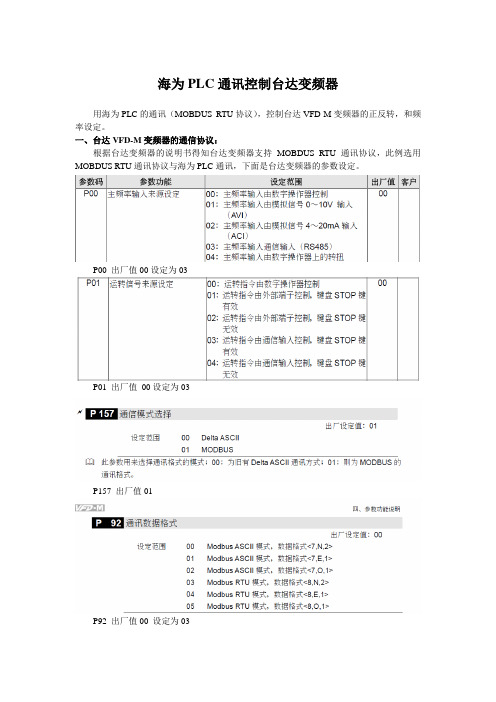
海为PLC通讯控制台达变频器用海为PLC的通讯(MOBDUS RTU协议),控制台达VFD-M变频器的正反转,和频率设定。
一、台达VFD-M变频器的通信协议:根据台达变频器的说明书得知台达变频器支持MOBDUS RTU通讯协议,此例选用MOBDUS RTU通讯协议与海为PLC通讯,下面是台达变频器的参数设定。
P00 出厂值00设定为03P01 出厂值00设定为03P157 出厂值01P92 出厂值00 设定为03P88 出厂值01例如,2000H=0000000000000001(十进制是1)控制停止,2000H=0000000000010010(十进制是18)控制正转启动,2000H=0000000000100010(十进制是34)控制反转启动,2001H=100当前变频器的频率为100。
二、海为PLC的程序的编写:用海为PLC的MOV指令把1停止功能代码,18正传功能代码,34反转功能代码,分别写给V0,还有频率V1的值,通过MOBDUS 写给变频器2000H、200H,如下图:海为MOBDUS写指令的参数设定,如下:Slave :从机设备地址(也就是变频器地址,此例设定成1)Code :功能码(此例用到200H和2001H两个连续的寄存器所以选择写多个寄存器16)Write :写入目标起始地址(写到变频器里面的起始地址此例是2000H,十进制是8192)Val :欲写数据起始地址(PLC准备要写给变频器的起始地址,此例是V0)N :数据长度(海为PLC MOBDUS 写指令,是以字为单位,此例2000H~2001H两个)Procotol :通讯协议(此例选择19200,N,8,2,RTU)Port :通讯口选择(海为PLC的通讯口1是232 2是485 此例用485通讯,选择2 )OUT :输出指示(通讯成功OUT就会输出此例为M10)设定完成后,如下图:十进制显示十六进制显示三、海为文本PT300的画面制作:新建一个工程:在工具栏点击文件,新建工程如下图:选择功能开关,局号是PLC地址,类型选择M 中间继电器地址写0 就是M0启动,如下图:添加寄存器,V用来设定频率,选择寄存器局号选择1 类型选择V 地址写1 设定要打勾这样才按文本的SET才可以对寄存器进行设定,如下图:下面是整个制作完成的画面:、。
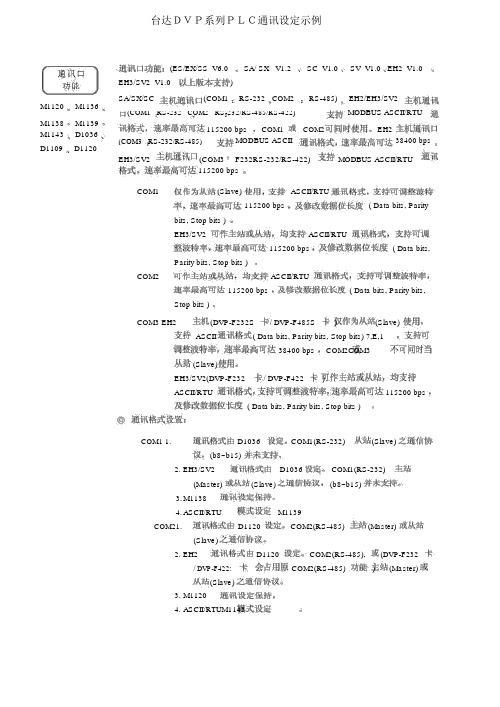
台达plc通讯格式示例

M1120M1136 M1138M1139 M1143D1036 D1109D1120(ES/EX/SS_V6.0SA/ SX _V1.2SC_V1.0SV_V1.0EH2_V1.0EH3/SV2_V1.0)SA/SX/SC(COM1RS-232COM2RS-485)EH2/EH3/SV2 (COM1RS-232COM2RS-232/RS-485/RS-422)MODBUS ASCII/RTU115200 bpsCOM1COM2EH2(COM3RS-232/RS-485)MODBUS ASCII38400 bpsEH3/SV2(COM3F232RS-232/RS-422)MODBUS ASCII/RTU115200 bpsCOM1(Slave)ASCII/RTU115200 bps( Data bits, Parity bits, Stop bits )EH3/SV2ASCII/RTU115200 bps( Data bits, Parity bits, Stop bits )COM2ASCII/RTU115200 bps( Data bits, Parity bits, Stop bits )COM3 EH2(DVP-F232S/ DVP-F485S)(Slave)ASCII( Data bits, Parity bits, Stop bits) 7,E,138400 bpsCOM2COM3(Slave)EH3/SV2(DVP-F232/ DVP-F422)ASCII/RTU115200 bps( Data bits, Parity bits, Stop bits )COM1 1.D1036COM1(RS-232)(Slave)(b8~b15)2. EH3/SV2D1036COM1(RS-232)(Master)(Slave)(b8~b15)3. M11384. ASCII/RTU M1139COM21.D1120COM2(RS-485)(Master)(Slave)2. EH2D1120COM2(RS-485),(DVP-F232/ DVP-F422:COM2(RS-485))(Master)(Slave)3. M11204. ASCII/RTU M1143台达DVP系列PLC通讯设定示例COM3 1.D1109COM3(DVP-F232S/ DVP-F485S)(Slave)(b0~b3b8~b15)2. EH3/SV2D1109COM3()(Master)(Slave)(b8~b15)3. M1136b0Odd Evenbitb3=10110 bps H17,E,1 6150 bps H27,N,1 0300 bps H37,O,1 2600bps H48,E,1 71200 bps H58,N,1 12400 bps H68,O,1 34800 bps H78,E,2 E 9600bps H88,N,2 919200 bps H98,O,2 B38400 bps HA 57600 bps HB 115200 bpsHC例:通讯格式为9600bps,数据位7,偶校验,停止位1,则数据格式为H8+6=H86。
台达plc通讯格式示例(20201006151256).docx
台达DVP系列PLC通讯设定示例(ES/EX/SS_V6.0SA/ SX _V1.2 SC_V1.0SV_V1.0 EH2_V1.0EH3/SV2_V1.0)M1120 SA/SX/SC(COM1RS-232 COM2RS-485)EH2/EH3/SV2M1136MODBUS ASCII/RTUM1138 (COM1 RS-232 COM2 RS-232/RS-485/RS-422)M1139 115200 bps COM1COM2EH2M1143 D1036MODBUS ASCII38400 bpsD1109(COM3 RS-232/RS-485)D1120(COM3F232RS-232/RS-422)MODBUS ASCII/RTUEH3/SV2115200 bpsCOM1(Slave)ASCII/RTU115200 bps( Data bits, Paritybits, Stop bits )EH3/SV2ASCII/RTU115200 bps( Data bits,Parity bits, Stop bits )COM2ASCII/RTU115200 bps( Data bits, Parity bits,Stop bits )COM3 EH2(DVP-F232S/ DVP-F485S)(Slave)ASCII( Data bits, Parity bits, Stop bits) 7,E,138400 bpsCOM2COM3(Slave)EH3/SV2(DVP-F232 / DVP-F422)ASCII/RTU115200 bps( Data bits, Parity bits, Stop bits )COM1 1.D1036COM1(RS-232)(Slave)(b8~b15)2. EH3/SV2D1036COM1(RS-232)(Master)(Slave)(b8~b15)3. M11384. ASCII/RTUM1139COM21.D1120COM2(RS-485)(Master)(Slave)2. EH2D1120COM2(RS-485),(DVP-F232 / DVP-F422:COM2(RS-485))(Master)(Slave)3. M11204. ASCII/RTUM1143COM3 1.D1109COM3(DVP-F232S/ DVP-F485S)(Slave)(b0~b3b8~b15)2. EH3/SV2D1109COM3()(Master)(Slave)(b8~b15)3. M113601 b0b0=0 7 b0 = 1 8b2, b1=00None b2, b1b2, b1=01Oddb2, b1=11Even b3stop bits=b3 0 1 bit=b3 1 2 bitb7~b4=0001(H1)110bpsb7~b4=0010(H2)150bpsb7~b4=0011(H3)300bpsb7~b4=0100(H4)600bpsb7~b4=0101(H5)1,200bpsb7~b4=0110(H6)2,400bps b7~b4(H7)4,800bpsb7~b4=0111b7~b4=1000(H8)9,600bpsb7~b4=1001(H9)19,200bpsb7~b4=1010(HA)38,400bpsb7~b4=1011(HB)57,600bpsb7~b4=1100(HC)115,200bpsb8b8 =0b8=1D1124b9b9=0b9=1D1125b10b10=0b10 =1D1126 b15~b11110 bps H17,E,1 6 150 bps H27,N,1 0 300 bps H37,O,1 2 600 bps H48,E,1 7 1200 bps H58,N,1 1 2400 bps H68,O,1 3 4800 bps H78,E,2 E 9600 bps H88,N,2 9 19200 bps H98,O,2 B 38400 bps HA57600 bps HB115200 bps HC 例:通讯格式为9600bps,数据位7,偶校验,停止位1,则数据格式为H8+6=H86。
【智】威纶通触摸屏与台达变频器MODBUS通讯宏指令转换案例详解
【智】威纶通触摸屏与台达变频器MODBUS通讯宏指令转换案例详解大家好,我是微控小智,今天又跟大家见面了。
小智写的程序都是进行反复测试过的,有些心得体会甚至无法用言语来表达,细微之处都是通过程序来体现的,看懂程序也需要一定的定力,很适合自学能力强的人学习和参阅。
在前期当中小智给大家介绍了威纶通触摸屏与台达VFD_M变频器Modbus通讯数据需要转换的问题,通讯画面中关联的是变频器MODBUS地址,如果数据不进行转换,往频率地址中需写入数值5000,变频器才能按50HZ运行,而实际工作中,方便用户在触摸屏上操作,直接在触摸屏上面输入50HZ的频率,变频器就按50HZ来运行。
除了可以用触摸屏中数值元件属性中的比例转换功能外,还可以通过触摸屏的宏指令来进行间接处理数据,宏指令类似C语言的编程语言,不太适合初学者,但一般只做简单的应用,也并不难,还是很容易懂的。
今天,小智就小试牛刀,用宏指令来处理威纶通触摸屏与台达VFD_M变频器Modbus通讯中数据转换的问题,类似的情况都可以这样处理,非常实用,观者也定会从中受到启发。
以下Modbus地址为编程提供参考。
Modbus地址:00001 - 09999:数字量输出(线圈)10001 - 19999:数字量输入(触点)30001 - 39999:输入数据寄存器(通常为模拟量输入)40001 - 49999:数据保持寄存器MODBUS地址根据功能码的不同,可以把上面的MODBUS地址分为0XXXX、1XXXX、3XXXX、4XXXX四种类型,是按10进制来分配,但需要注意的是四种类型MODBUS首地址都是从1开始的,台达VFD_M的变频器是间接给出MODBUS地址定义,需要把通讯参数地址转换成对应的modbus地址。
台达变频器Modbus地址定义如下图示:设定频率转换:频率命令有两个为2001H或2102H,转换后Modbus地址为48194或48451;频率的输入地址采用触摸屏本地地址,选择Local HMI设备后,地址选择RW_0;频率设定值给到内部MODBUS地址的转换采用宏指令来进完成,在工具下拉菜单中选择宏指令,在宏指令对话框中新增宏指令或编辑宏指令,编辑完后,需增加触发宏指令的功能元件,设置画面如下图:频率显示转换:频率命令有两个为2103H,转换后Modbus地址为48452;触摸屏选择ModbusRTU设备后,地址选择4X_8452,在对应地址的数值元件属性对话框中选择数据格式选项,添加比例转换,设置画面如下图:电流显示转换:2104H转换后Modbus地址为48453,触摸屏选择ModbusRTU设备后,地址选择4X_8453,在对应地址的数值元件属性对话框中选择数据格式选项,添加比例转换,设置画面如下图:电压显示转换:2106H转换后Modbus地址为48455,触摸屏选择ModbusRTU设备后,地址选择4X_8455,在对应地址的数值元件属性对话框中选择数据格式选项,添加比例转换,设置画面如下图:威纶通触摸屏与台达VFD_M变频器Modbus通讯数据转换后效果如下图所示:。
PLC与台达VFD-B系列变频器通讯(MODRD-MODWR)设计实例..
PLC 与台达VFD-B 系列变频器通讯(MODRD/MODWR)设计实例详解【控制要求】读取VFD-B 系列变频器的主频率(频率指令)、输出频率。
(MODRD 指令实现) 按下运行按钮,变频器以反转启动,频率从0HZ 开始每隔1s 频率增大1Hz,当频率到达50Hz 后,以50Hz 频率恒速运行。
(MODWR 指令实现)按下停止按钮,变频器停止运转。
(MODWR 指令实现)【VFD-B 变频器参数必要设置】当出现变频器因参数设置错乱而导致不能正常运行时,可先设置P00-02=10(回归出厂值),再按照上表进行参数设置。
【元件说明】【控制程序】【程序说明】对PLC RS-485 通讯口进行初始化,使其通讯格式为MODBUS RTU,19200,8,N,2。
变频器RS485 通讯口通讯格式需与PLC 通讯格式一致。
MODBUS 通讯只会出现 4 种情况,正常通讯完成对应通讯标志M1127、通讯错误对应通讯标志:M1129、M1140、M1141,所以,在程序中通过对这 4 个通讯标志信号的On/Off 状态进行计数,再利用C0 的数值来控制3 个MODBUS 指令的依次执行,保证通讯的可靠性。
当M0=On 时,[ MODRD K1 H2102 K2 ] 被执行,PLC 读取VFD-B 变频器的主频率(频率指令)及输出频率以ASCII 码字符形式存放在储存于D1073~D1076 中,并自动转换成16进制数值存于D1050、D1051 中。
当M1=On 时,[ MODWR K1 H2000 D10 ] 被执行,变频器启动反方向运转。
当M2=On 时,[ MODWR K1 H2001 D2 ] 被执行,变频器的主频率随着D2 值变化而变化。
PLC 一开始RUN 时,比较C0=0,就一直反复地对变频器进行通讯读写。
台达变频器说明书VFD-F

產品系列
055F43A0 T 2 01 001
T:桃園 S:上海 W:吳江 460V 3-PHASE 7.5HP(5.5kW)
製造序號 生產周次 生產年份 製造工廠 生產機種
如有任何登錄資料與您訂貨資料不符或產品有任何問題,請您與接洽之代理商或經銷商聯絡。
1-1
第二章 儲存及安裝
VFD-F 系列
儲存
50mm 50mm
150mm
冷空氣
安裝環境
▲ 無水滴、蒸氣、灰塵及油性灰塵之場所。 ▲ 無腐蝕、易燃性之氣、液體。 ▲ 無漂浮性的塵埃及金屬微粒。. ▲ 堅固無振動之場所。 ▲ 無電磁雜訊干擾之場所。 ▲ 使用環境溫度為-10℃∼40℃。若環境溫度超過 40℃以上時,請置於通風良好之場所。
2-1
VFD-F 系列
制 動 單 元* 3
章
無熔絲斷路器
R
S
T
NFB
+1 +2/B1 B2
-
MC
R/L1
U/T1
S/L2 VFD-F V/T2
T/L3
W/T3
電機
M 3~
SA
ON
異常或電源瞬間 斷路保護建議線路 OFF
RB1
RC1
MC
RA1 多機能接點輸出
240VAC 2.5A
RB1 120VAC 5A
28VDC 5A
正 轉/停 止 反 轉/停 止 外部異常 多 段 速 指 令1
高壓十分危險,請勿觸摸內部電路及零組件。 3. 絕對不可以自行改裝交流電機驅動器內部的零件或線路。 4. 絕不可將交流電機驅動器輸出端子 U/T1、V/T2、W/T3 連接至 AC 電源。
5. 交流電機驅動器端子 務必正確的接地。460V 系列特種接地。
台达plc与vfd-m通信

1 引言plc和变频器是自动化设备上最常见的部件。
其最初的控制型式大多是用plc的i/o点和模拟量模块直接控制变频器的启停和实现调速,但这种控制方式有两大弊端,最大的弊端是占用plc的i/o点和需要增加昂贵的模拟量模块,造成控制成本的增加。
当被控制的变频器数量较多时,此弊端更是明显。
第二个弊端是模拟量控制容易受干扰,传输距离也容易受限制。
近几年来自动化产品不断更新换代,性能不断提升,功能日益强大。
在小型plc方面这个变化更加明显,现在的小型plc不仅执行速度大大提高,指令功能日益丰富,更重要的是大都支持多种通讯协议,并提供了更多的通讯接口。
同时大多的变频器也具有了rs485接口,也能支持多种通讯协议,最常见的就是modbus协议。
这种技术的进步为plc和变频器通讯的实现,提供了软件上的协议和硬件上的物理接口,从而为低成本高性能的通讯控制的实现打下了良好的基础。
2 通讯相关的基础知识2.1 通讯协议communications protocol通信协议是指通信双方的一种约定。
这个约定包括对数据格式、同步方式、传送速度、传送步骤、检纠错方式以及控制字符定义等问题做出统一规定,通信双方必须共同遵守。
因此,也叫做通信控制规程,或称传输控制规程。
modbus协议是工业控制器中使用较普遍的一种网络协议。
通过此协议,各种控制器之间(比如p lc、变频器、伺服驱动器、各种智能仪表)、控制器通过其它网络(比如以太网)和其它设备之间都可以通信交换信息。
该协议定义了一个控制器可以识别的信息架构,从而使不同厂商生产的支持此协议的各种工控产品可以连接到一个网络上进行集中控制和信息交换。
2.2 rs485接口的特点rs485接口是在大家熟知的rs232接口的基础上推出的性能更优的一种串口。
由于rs485接口具有良好的抗噪声干扰性,长的传输距离和多站功能等优点,它成为应用越来越广泛的串行接口。
此外,rs485接口组成的半双工网络一般只需二根屏蔽双绞电线,这为长距离的通讯线路节省了很多配线,降低了系统的成本。
台达vfd el 485 通讯 设置参数

【专题】探索台达VFD EL 485通讯设置参数一、前言在工业自动化领域,变频器(VFD)作为调速控制设备得到了广泛应用。
而台达VFD EL系列作为一款性能稳定、功能强大的变频器,其485通讯设置参数更是备受关注。
在本文中,我们将深入探讨台达VFD EL 485通讯设置参数的相关内容,帮助您更好地了解和应用这一领域的知识。
二、台达VFD EL 485通讯设置参数的基本概念1. 通讯接口简介台达VFD EL系列变频器具备RS485通讯接口,可用于上位机和变频器之间的通讯连接。
通过485通讯设置参数的调整,可以实现上位机对变频器的监控和控制,为工业生产提供了便利。
2. 通讯参数设置在进行485通讯设置参数时,需要注意波特率、数据位、校验位、停止位等参数的配置。
这些参数的准确设置对于实现正常通讯至关重要,因此需仔细调整每一项参数的数值和选项。
3. 通讯协议选择通讯协议是485通讯设置参数中的重要一环,常见的有Modbus-RTU协议、ASCII协议等。
不同的通讯协议适用于不同的场景和设备,因此需根据实际情况选择合适的通讯协议。
三、深入探讨台达VFD EL 485通讯设置参数1. 波特率设置波特率是RS485通讯的基本参数之一,通常可选择的数值有9600、19200、38400等。
在实际应用中,需要根据通讯距离和设备要求来确定最佳的波特率数值,以确保通讯的稳定和可靠性。
2. 数据位、校验位、停止位设置这三项参数是485通讯设置中的重要组成部分,它们共同构成了通讯数据的格式和格式校验。
合理设置这些参数可以有效减少通讯误码率,提高通讯的可靠性和稳定性。
3. 通讯协议选择及配置针对不同的应用场景和设备类型,选择合适的通讯协议至关重要。
Modbus-RTU协议通常适用于工业控制领域,而ASCII协议则更多用于通讯格式要求较为灵活的场景。
四、结语通过以上对台达VFD EL 485通讯设置参数的深入探讨,我们不仅对这一领域的知识有了更深入的了解,同时也为后续的实际应用提供了有力的支持。
台达VFD-L使用手册
以在交流指示燈連接 請將減速時間加長以避免驅動器跳過電壓保護。
不可將交流電源連接至交流馬達驅動器出力側端子U/T1, V/T2, W/T3。
主回路端子的螺絲請確實鎖緊,以防止因震動鬆脫產生火花。
主回路與控制回路的配線必需分離,以防止發生誤動作。
如必需交錯請作成90°的交叉。
若交流馬達驅動器出力側端子 U/T1, V/T2, W/T3有必要加裝雜訊濾波器時,必需使用電感式L-濾波器,不可加裝進相電容器或L-C、R-C式濾波器。
控制配線請儘量使用隔離線,端子前的隔離網剝除段請勿露出。
電源配線請使用隔離線或線管,並將隔離層或線管兩端接地。
如果交流馬達驅動器的安裝場所對干擾相當敏感,則請加裝RFI濾波器,安裝位置離交流馬達驅動器越近越好。
PWM的載波頻率越低,干擾也越少。
交流馬達驅動器若有加裝一般漏電斷路器以作為漏電故障保護時,為防止漏電斷路器誤動作,請選擇感度電流在200mA以上,動作時間為0.1秒以上者。
使用交流馬達驅動器專用漏電斷路器時,請選擇感度電流在30mA以上。
4參數一覽表用戶參數0a運轉中可設定參數參數功能設定範圍出廠值0-00 機種識別(僅供讀取)d1:40Wd2:100Wd3:200Wd4:400Wd5:750Wd6:1.5KW工廠設定0-01額定電流顯示(僅供讀取)40W:d0.4A100W:d0.8A200W:d1.6A400W:d2.5A750W:d4.2A1.5K:d7.0A工廠設定0-02 參數重置設定 d10:參數回復工廠設定d0a0-03 開機顯示d0:F(頻率指令)d1:H(輸出頻率)d2:U(使用者定義)d3:A(輸出電流)d0a0-04 定義多功顯示內容d0:顯示使用者定義(u)d1:顯示計數內容(C)d2:顯示程序運轉內容(1=tt)(顯示目前運轉的段數及該段剩餘的運轉時間)d3:顯示DC-BUS電壓(U)d4:顯示輸出電壓(E)d0a0-05 使用者定義比例設定 d0.1~d160 d1.00-06 軟體版本僅能讀取#.#0-07 參數保護解碼輸入d0~d999d0:無密碼鎖/正確密碼已被輸入d1:參數已被鎖定d00-08 參數保護密碼輸入d0~d999d0:未設定密碼d1:密碼已設定成功d0基本參數1參數參數功能設定範圍出廠值1-00 最大操作頻率 d50.0~d400Hz d60.01-01 最大頻率設定 d10.0~d400Hz d60.01-02 最大輸出電壓設定 d2.0~d255V d2201-03 中間頻率設定 d1.0~d400Hz d1.01-04 中間電壓設定 d2.0~d255V d12.01-05 最低輸出頻率設定 d1.0~d60.0Hz d1.01-06 最低輸出電壓設定 d2.0~d255V d12.01-07 上限頻率 d1~d110% d1001-08 下限頻率 d0~d100% d0.0a1-09 第一加速時間 d0.1~d600 Sec d10.0a1-10 第一減速時間 d0.1~d600 Sec d10.0a1-11 第二加速時間 d0.1~d600 Sec d10.0a1-12 第二減速時間 d0.1~d600 Sec d10.0a1-13 JOG加速時間設定 d0.1~d600 Sec d10.0a1-14 JOG減速時間設定 d0.0~d600 Sec d10.0a1-15 JOG頻率設定d1.0Hz~d400Hz d6.0 1-16 自動加/減速設定d0:正常加/減速d1:自動加速;正常減速d2:正常加速;自動減速d3:自動加/減速d4:正常加速;自動減速時,減速中失速防止d5:自動加速;自動減速時,減速中失速防止d01-17 加速S曲線設定 d0~d7 d01-18 減速S曲線設定 d0~d7 d0操作方式參數2參數參數功能設定範圍出廠值2-00 主頻率輸入來源d0:由鍵盤輸入d1:由外部 AVI 輸入0~10Vd2:由外部 AVI 輸入4~20mAd3:由面板上V.R控制d4:由RS-485通信界面輸入d02-01 運轉指令來源d0:由鍵盤操作d1:由外部端子操作,鍵盤STOP有效d2:由外部端子操作,鍵盤STOP無效d3:由RS-485通信界面操作,鍵盤STOP 有效d4:由RS-485通信界面操作,鍵盤STOP 無效d02-02 停車方式d0:以減速煞車方式停止d1:以自由運轉方式停止d02-03 載波頻率設定 d3~d10K Hz d102-04 反轉禁止d0:可反轉d1:禁止反轉d2:禁止正轉d02-05 ACI(4~20mA)斷線處理d0:減速至0Hzd1:立即停止顯示EFd2:以最後頻率運轉d02-06 電源起動運轉鎖定d0:可運轉d1:不可運轉d0輸出功能參數3參數參數功能設定範圍出廠值3-00 任意到達頻率 d1.0~d400 Hz d1.0 3-01 計數值到達設定 d0~d999 d0 3-02 指定計數值到達 d0~d999 d0 3-03 多機能輸出(繼電器) d0:無功能d1:運轉中指示d2:設定頻率到達指示d3:零速中指示d4:過轉矩檢出指示d5:外部中斷(B.B.)指示d6:低電壓檢出指示d7:交流馬達驅動器運轉指令由外部端子控制時指示d8:故障指示d9:任意頻率到達指示d10:執行程序自動運轉時指示d11:一階段運轉完成指示(只維持0.5秒)d12:自動運轉完成指示(只維持0.5秒)d13:自動運轉暫停指示d14:設定計數到達指示d15:指定計數到達指示d16:驅動器準備完成(送電後無異常指示)d8輸入功能參數4參數參數功能設定範圍出廠值a4-00 類比輸入頻率偏壓 d0.0~d350Hz d0.0 a4-01 偏壓調整方向 d0:正方向d1:負方向d0 a4-02 輸入頻率增益 d1~d200%d1004-03 負偏壓可反轉d0:無負偏壓d1:負偏壓可反轉d2:負偏壓不可反轉d04-04 多功能輸入選擇一(M1)(設定範圍d 0~d 20)d14-05 多功能輸入選擇二(M2)(設定範圍d 0, d4~d20)d64-06 多功能輸入選擇三(M3) (設定範圍d 0, d 4~d20) d0:無功能d1:M0:正轉/停止,M1:反轉/停止d2:M0:運轉/停止,M1:正轉/反轉d3:M0,M1,M2:三線式運轉控制d4:E.F,常開接點輸入(N.O)d5:E.F,常閉接點輸入(N.C)d6:RESET指令d7:多段速指令一d8:多段速指令二d9:寸動頻率指令d10:加/減速禁止d11:第一、二加減速時間切換d12:外部中斷,常開接點(N.O)輸入d13:外部中斷,常閉接點(N.C)輸入d14:上頻率指令(Up command)d15:下頻率指令(Down command)d16:自動程序運轉執行d17:自動程序運轉暫停d18:計數器觸發信號輸入d19:計數器清除d20:選擇ACI/取消AVId7多段速以及自動程序運轉參數5參數參數功能設定範圍出廠值5-00 第一段速 d0.0~d400Hz d0.05-01 第二段速 d0.0~d400Hz d0.05-02 第三段速 d0.0~d400Hz d0.05-03 自動程序運轉模式d0:自動運行模式取消d1:自動運行一週期後停止d2:自動運行循環運轉d3:自動運行一週後停止(STOP間隔)d4:自動運行循環運轉(STOP間隔)d05-04 PLC運轉方向 d0~d15 (d0:正轉 d1:反轉) d05-05 PLC第0段時間 d0~d65500 Sec d05-06 PLC第一段時間 d0~d65500 Sec d05-07 PLC第二段時間 d0~d65500 Sec d05-08 PLC第三段時間 d0~d65500 Sec d0保護參數6參數參數功能設定範圍出廠值6-00過電壓失速防止動作電壓d0:無效d350~d410Vd3906-01 過電流失速防止位準設定d0:無效d20~d200%d1706-02 過轉矩檢出功能選擇d0:不檢測d1:定速運轉中過轉矩偵測,(oL2)繼續運轉d2:定速運轉中過轉矩偵測,(oL2)停止運轉d3:加速中過轉矩偵測,(oL2)繼續運轉d4:加速中過轉矩偵測,(oL2)停止運轉d06-03 過轉矩檢出位準 d30~d200%d1506-04 過轉矩檢出時間 d0.1~d10.0 Sec d0.16-05 電子熱電驛選擇d0:不動作d1:以標準馬達動作d2:以特殊馬達動作d06-06 熱電驛作用時間d30~d600 Sec d606-07 最近第一異常記錄6-08 最近第二異常記錄6-09 最近第三異常記錄6-10 最近第四異常記錄6-11 最近第五異常記錄6-12 最近第六異常記錄d0:無異常記錄d1:oc(過電流)d2:ov(過電壓)d3:oH(過熱)d4:oL(驅動器過載)d5:oL1(電子熱動電驛)d6:EF(外部異常)d7:Reserved(保留)d8:Reserved(保留)d9:ocA(加速中過電流)d10:ocd(減速中過電流)d11:ocn(恆速中過電流)d0特殊參數7參數參數功能設定範圍出廠值a7-00 電機滿載電流 d30~d120%d85a7-01 電機無載電流 d0~d90%d50a7-02 轉矩補償 d0~d10 d1a7-03 轉差補償 d0.0~d10.0 d0.0高功能參數8參數參數功能設定範圍出廠值8-00 直流制動電壓準位 d0~d30%d08-01 啟動時直流制動時間 d0.0~d60.0 Sec d0.08-02 停止時直流制動時間 d0.0~d60.0 Sec d0.08-03 直流制動的起始頻率 d0.0~d400.0 Sec d0.08-04 瞬間停電再啟動d0:瞬間停電後不繼續運轉d1:瞬間停電後繼續運轉,由停電後頻率往下追蹤d2:瞬間停電後繼續運轉,由停電後頻率往上追蹤d08-05 允許停電時間 d0.3~d5.0 Sec d2.08-06 速度追蹤B.B時間d0.3~d5.0 Sec d0.58-07 速度追蹤最大電流d30~d200% d1508-08 禁止設定頻率1上限d0.0~d400 Hz d0.08-09 禁止設定頻率1下限d0.0~d400 Hz d0.08-10 禁止設定頻率2上限d0.0~d400 Hz d0.08-11 禁止設定頻率2下限d0.0~d400 Hz d0.08-12 禁止設定頻率3上限d0.0~d400 Hz d0.08-13 禁止設定頻率3下限d0.0~d400 Hz d0.08-14 異常再啟動次數 d0~d10(允許異常狀況:OC、OV)d08-15 AVR功能選擇d0:有AVR功能d1:無AVR功能d2:減速時,AVR功能取消d28-16 DC-bus煞車準位 d350~d450V d380參數參數功能設定範圍出廠值8-17直流制動的起始下限頻率d0.0~d400 Hz d0.0通訊參數9參數參數功能設定範圍出廠值a9-00通訊位址 d1~d247 d1a9-01通訊傳送速度d0:Baud rate 4800d1:Baud rate 9600d2:Baud rate 19200d1a9-02傳輸錯誤處理d0:警告並繼續運轉d1:警告且減速停車d2:警告且自由停車d3:不警告繼續運轉d0a9-03通訊Watchdog時間設定d1~d20:1~20 Sec (0:禁能) d0a9-04通訊資料格式ASCII moded0:7,N,2d1:7,E,1d2:7,O,1d3:8,N,2d4:8,E,1d5:8,O,1RTU moded6:8,N,2d7:8,E,1d8:8,O,1d05錯誤訊息指示與故障排除交流馬達驅動器本身有過電壓、低電壓及過電流等多項警示訊息及保護功能,一旦異常故障發生,保護功能動作,交流馬達驅動器停止輸出,異常接點動作,馬達自由運轉停止。
3-11-台达变频器通讯指令

3-11 台達變頻器通訊指令(MODBUS DATA READ)MODRD指令係針對MODBUS ASCII 模式的通訊週邊設備專用的驅動指令。
台達VFD變頻器內建的RS-485通訊接口皆符合MODBUS的通訊格式(除了VFD-A系列),因此可利用MODRD指令對台達變頻器進行通訊控制(資料讀取)。
在實際使用時,必須配合連線裝置使用說明書。
M1143=ON為RTU模式(PLC版本必須在V3.3以㆖)。
M1143=OFF為ASCII模式。
S1連線裝置位址。
K00000~K00254。
S2欲讀取資料的位址。
若位址對於被指定的裝置不合法,則會回應錯誤訊息,錯誤碼儲存於D1130,同時M1141會ON。
例如4000H對VFD-S不合法,則M1141 ON,D1130 = 2,錯誤碼請參考VFD-B使用手冊)。
n資料讀取長度,其㆗n≦6。
週邊裝置回傳的資料儲存於D1070~D1085。
接收完畢後,PLC會自動檢查所接收的資料是否有誤,若發生錯誤則M1140會ON。
由於回傳的資料均為ASCII字元,PLC會另外將回傳主要的資料轉為數值轉存於D1050~D1055。
當M1140 ON 或M1141 ON 之後,再傳送㆒筆正確資料給週邊裝置,若回傳的資料正確則 M1140,M1141 會被RESET。
DELTA VFD-B的參數設定:參數代號參數功能設定範圍出廠設定02-00 頻率指令來源設定 00:由鍵盤輸入0001:由外部0〜10V輸入(AVI)02:由外部4〜20mA輸入(ACI)03:由外部-10〜10V輸入(AUI)04:由通信RS485輸入02-01 運轉指令來源設定 00:由鍵盤操作0001:由外部端子操作鍵盤STOP鍵有效02:由外部端子操作鍵盤STOP鍵無效03:由RS-485通信界面操作鍵盤STOP鍵有效04: 由RS-485通信界面操作鍵盤STOP鍵無效3-124參數代號參數功能設定範圍出廠設定09-00 通訊位址 01〜254 0109-01 通訊傳送速度00: Baud rate 4800 0101: Baud rate 960002: Baud rate 1920003: Baud rate 3840009-04 通訊格式00: 7,N,2 for ASCII 0001: 7,E,1 for ASCII02: 7,O,1 for ASCII03: 8,N,2 for RTU04: 8,E,1 for RTU05: 8,O,1 for RTUDELTA VFD-B通信協定的參數位址定義:定義參數位址功能說明驅動器內部設定參數GGnnH GG表示參數群,nn表示參數號碼。
台达VFD通讯示例
台达VFD-B变频器串口通信中,频率设定,还有正转、反转、停顿字符串是怎样写?X例1:设定VFD-B系列变频器的频率为30.00Hz,通讯格式为9600,8,N,2,RTU01 06 2001 0BB8 D488X例2:设定VFD-B系列变频器正转,通讯格式为9600,8,N,2,RTU01 06 2000 0022 0213X例3:设定VFD-B系列变频器停顿,通讯格式为9600,8,N,2,RTU01 06 2000 0001 43CA西门子与台达变频器通讯ORGANIZATION_BLOCK 主程序:OB1TITLE=实现S7-200 PLC与台达变频器通信// 实现功能是PLC通过RS485通信控制变频器的正转启动、反转启动、停顿、加速、减速和读取输出频率。
变频器通过Modbus通信方式进展// 要求台达变频器设置根本通信参数:// P00=d03〔主频率由RS485控制〕// P01=d03〔运转/停顿由RS485通信控制〕// P88=d01〔站点定义为1号站〕// P90=d00 P91=d00 P92=d02 P113=d01// 〔其他参数都是出厂默认值,可根据实际情况调节〕//BEGINNetwork 1LD SM0.1CALL SBR0Network 2 // 正转启动命令LD M10.0EUMOVB 16#30, VB104 MOVB 16#36, VB105 MOVB 16#32, VB106 MOVB 16#30, VB107 MOVB 16#30, VB108 MOVB 16#30, VB109 MOVB 16#30, VB110 MOVB 16#30, VB111 MOVB 16#31, VB112 MOVB 16#32, VB113 CALL SBR1Network 3 // 反转启动指令LD M10.1EUMOVB 16#30, VB104 MOVB 16#36, VB105 MOVB 16#32, VB106 MOVB 16#30, VB107 MOVB 16#30, VB108 MOVB 16#30, VB109 MOVB 16#30, VB110 MOVB 16#30, VB111 MOVB 16#32, VB112 MOVB 16#32, VB113 CALL SBR1Network 4 // 停顿指令LD M10.2EUMOVB 16#30, VB104MOVB 16#36, VB105MOVB 16#32, VB106MOVB 16#30, VB107MOVB 16#30, VB108MOVB 16#30, VB109MOVB 16#30, VB110MOVB 16#30, VB111MOVB 16#30, VB112MOVB 16#31, VB113CALL SBR1Network 5 // 1秒脉冲LDN T37TON T37, 10Network 6 // 加速指令〔每1秒步进加速0.01Hz〕LD M10.3A T37INCW VW135Network 7 // 减速指令〔每1秒步进减速0.01Hz〕LD M10.4A T37DECW VW135Network 8 // 上限频率50.00HzLDW>= VW135, 5000MOVW 5000, VW135Network 9 // 下限频率0.1HzLDW<= VW135, 10MOVW 10, VW135Network 10 // 凡有频率改变,调用子程序3 LDW<> VW135, VW145O SM0.1CALL SBR3Network 11 // 读取输出频率指令LD M10.5EUMOVB 16#30, VB104MOVB 16#33, VB105MOVB 16#32, VB106MOVB 16#31, VB107MOVB 16#30, VB108MOVB 16#33, VB109MOVB 16#30, VB110MOVB 16#30, VB111MOVB 16#30, VB112MOVB 16#31, VB113S M20.0, 1CALL SBR1Network 12 // 当读取频率时,执行频率显示运算子程序LD SM4.5A M20.1CALL SBR2Network 13 // SMB86=0表示正在接收,但本例是利用中断来接收LDB<> SMB86, 0MOVB SMB86, VB400Network 14 // 发送完成标志LD SM4.5= Q0.0END_ORGANIZATION_BLOCKSUBROUTINE_BLOCK SBR_0:SBR0TITLE=通信初始化参数子程序BEGINNetwork 1 // 初始化通信参数及定义开场符、终止符等接收信息LD SM0.0MOVB 16#69, SMB30MOVB 16#E0, SMB88MOVB 16#3A, SMB89MOVB 18, SMB94Network 2 // 初始化固定参数LD SM0.0MOVB 16#3A, VB101MOVB 16#30, VB102MOVB 16#31, VB103MOVB 16#0D, VB116MOVB 16#0A, VB117Network 3 // 声明使用发送完成中断LD SM0.0ATCH INT0, 9ENIEND_SUBROUTINE_BLOCK SUBROUTINE_BLOCK SBR_1:SBR1 TITLE=计算校验及子程序BEGINNetwork 1 // 建立指针及参数清零等初始化LD SM0.0MOVD &VB101, VD131MOVW 0, VW129MOVW 6, VW127MOVW 0, AC0MOVW 0, AC1MOVW 0, AC2MOVW 0, AC3Network 2 // 循环计算原始累加和LD SM0.0FOR VW125, 1, VW127Network 3LD SM0.0LPSMOVW *VD131, AC0 ANDW 16#FF, AC0 AB> AC0, 16#39 MOVW AC0, AC1-I 16#37, AC1 LRDAB<= AC0, 16#39 MOVW AC0, AC1-I 16#30, AC1 LRDINCD VD131LRDMOVW *VD131, AC0 ANDW 16#FF, AC0 LRDAB> AC0, 16#39 MOVW AC0, AC2-I 16#37, AC2 LRDAB<= AC0, 16#30 MOVW AC0, AC2-I 16#30, AC2 LRDSLB AC1, 4LRDMOVW AC1, AC3+I AC2, AC3LRD+I AC3, VW129 LPP+D 1, VD131Network 4NEXTNetwork 5 // 指针加一,指向下一个LD SM0.0MOVW 0, AC2MOVW 0, AC3+D 1, VD131Network 6LD SM0.0LPSMOVW 16#FF, AC0ANDW VW129, AC0INVW AC0MOVW 1, VW800+I AC0, VW800MOVB VB801, AC2SRB AC2, 4AW> AC2, 9+I 16#37, AC2LRDMOVB AC2, *VD131LRD+D 1, VD131LRDMOVB VB801, AC3ANDB 16#0F, AC3LRDAW> AC3, 9+I 16#37, AC3LRDAW<= AC3, 9+I 16#30, AC3LPPMOVB AC3, *VD131Network 7 // 发送前,强行制止接收LD SM0.0MOVB 16#70, SMB87RCV VB200, 0Network 8 // 开场发送LD SM0.0MOVB 17, VB100XMT VB100, 0FILL 0, VW200, 9Network 9 // 发送后允许接收LD SM0.0MOVB 16#F0, SMB87END_SUBROUTINE_BLOCKSUBROUTINE_BLOCK SBR_2:SBR2TITLE=频率显示运算子程序VARLIN1:DWORD;lLIN2:DWORD;LIN3:DWORD;LIN4:DWORD;END_VARBEGINNetwork 1 // 把接收到的16进制ASCII码信息,转换成习惯的小数点形式LD SM0.0BTI VB2008, LW0BTI VB2009, LW2BTI VB2010, LW4BTI VB2011, LW6Network 2LD SM0.0LPSAW> LW0, 16#40 MOVW LW0, AC0 -I 16#37, AC0 LPPAW< LW0, 16#40 MOVW LW0, AC0 -I 16#30, AC0 Network 3LD SM0.0LPSAW> LW2, 16#40 MOVW LW2, AC1 -I 16#37, AC1 LPPAW< LW2, 16#40 MOVW LW2, AC1 -I 16#30, AC1 Network 4LD SM0.0LPSAW> LW4, 16#40 MOVW LW4, AC2 -I 16#37, AC2 LPPAW< LW4, 16#40 MOVW LW4, AC2 -I 16#30, AC2 Network 5LD SM0.0LPSAW> LW6, 16#40 MOVW LW6, AC3-I 16#37, AC3LPPAW< LW6, 16#40 MOVW LW6, AC3-I 16#30, AC3 Network 6LD SM0.0MOVB AC0, LB8SLB LB8, 4MOVB AC2, LB9SLB LB9, 4Network 7LD SM0.0MOVB LB8, VB3200 ORB AC1, VB3200 Network 8LD SM0.0MOVB LB9, VB3201 ORB AC3, VB3201 Network 9LD SM0.0ITD VW3200, VD3300 DTR VD3300, VD3304 MOVR VD3304, VD3308-./R 100.0, VD3308Network 10LD SM0.0R M20.1, 1END_SUBROUTINE_BLOCKSUBROUTINE_BLOCK SBR_3:SBR3TITLE=输出频率通信格式整理子程序BEGINNetwork 1 // 但凡有输出频率,频率改变LD SM0.0MOVB 16#30, VB104MOVB 16#36, VB105MOVB 16#32, VB106MOVB 16#30, VB107MOVB 16#30, VB108MOVB 16#31, VB109MOVW VW135, VW137MOVW 0, AC0MOVW 0, AC1MOVW 0, AC2MOVW 0, AC3Network 2LD SM0.0LPSMOVB VB137, AC0ANDB 16#0F, AC0AW> AC0, 9+I 16#37, AC0LRDAW<= AC0, 9+I 16#30, AC0- .word.zl.LRDITB AC0, VB111LRDMOVB VB138, AC1 ANDB 16#0F, AC1 LRDAW> AC1, 9+I 16#37, AC1LRDAW<= AC1, 9+I 16#30, AC1LPPITB AC1, VB113 Network 3LD SM0.0LPSMOVW VW137, VW139 SRW VW139, 4 MOVB VB139, AC2 ANDB 16#0F, AC2 AW> AC2, 9+I 16#37, AC2LRDAW<= AC2, 9+I 16#30, AC2LRDITB AC2, VB110LRDMOVB VB140, AC3 ANDB 16#0F, AC3 LRDAW> AC3, 9-.+I 16#37, AC3LRDAW<= AC3, 9+I 16#30, AC3LRDITB AC3, VB112LRDMOVW VW135, VW145LPPCALL SBR1END_SUBROUTINE_BLOCKINTERRUPT_BLOCK INT_0:INT0TITLE=发送完成中断程序BEGINNetwork 1 // 除读取频率其他指令返回信息LD M20.0RCV VB200, 0Network 2 // 读取频率返回信息LD M20.0RCV VB2000, 0S M20.1, 1R M20.0, 1END_INTERRUPT_BLOCK- .word.zl.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
台达VFD-B变频器串口通信中,频率设定,还有正转、反转、停止字符串是怎样写?范例1:设定VFD-B系列变频器的频率为30.00Hz,通讯格式为9600,8,N,2,RTU01 06 2001 0BB8 D488范例2:设定VFD-B系列变频器正转,通讯格式为9600,8,N,2,RTU01 06 2000 0022 0213范例3:设定VFD-B系列变频器停止,通讯格式为9600,8,N,2,RTU01 06 2000 0001 43CA西门子与台达变频器通讯ORGANIZATION_BLOCK 主程序:OB1TITLE=实现S7-200 PLC与台达变频器通信// 实现功能是PLC通过RS485通信控制变频器的正转启动、反转启动、停止、加速、减速和读取输出频率。
变频器通过Modbus通信方式进行// 要求台达变频器设置基本通信参数:// P00=d03(主频率由RS485控制)// P01=d03(运转/停止由RS485通信控制)// P88=d01(站点定义为1号站)// P90=d00 P91=d00 P92=d02 P113=d01// (其他参数都是出厂默认值,可根据实际情况调节)//BEGINNetwork 1LD SM0.1CALL SBR0Network 2 // 正转启动命令LD M10.0EUMOVB 16#30, VB104 MOVB 16#36, VB105 MOVB 16#32, VB106 MOVB 16#30, VB107 MOVB 16#30, VB108 MOVB 16#30, VB109 MOVB 16#30, VB110 MOVB 16#30, VB111 MOVB 16#31, VB112 MOVB 16#32, VB113 CALL SBR1Network 3 // 反转启动指令LD M10.1EUMOVB 16#30, VB104 MOVB 16#36, VB105 MOVB 16#32, VB106 MOVB 16#30, VB107 MOVB 16#30, VB108 MOVB 16#30, VB109 MOVB 16#30, VB110 MOVB 16#30, VB111 MOVB 16#32, VB112 MOVB 16#32, VB113 CALL SBR1Network 4 // 停止指令LD M10.2EUMOVB 16#30, VB104MOVB 16#36, VB105MOVB 16#32, VB106MOVB 16#30, VB107MOVB 16#30, VB108MOVB 16#30, VB109MOVB 16#30, VB110MOVB 16#30, VB111MOVB 16#30, VB112MOVB 16#31, VB113CALL SBR1Network 5 // 1秒脉冲LDN T37TON T37, 10Network 6 // 加速指令(每1秒步进加速0.01Hz)LD M10.3A T37INCW VW135Network 7 // 减速指令(每1秒步进减速0.01Hz)LD M10.4A T37DECW VW135Network 8 // 上限频率50.00HzLDW>= VW135, 5000MOVW 5000, VW135Network 9 // 下限频率0.1HzLDW<= VW135, 10MOVW 10, VW135Network 10 // 凡有频率改变,调用子程序3 LDW<> VW135, VW145O SM0.1CALL SBR3Network 11 // 读取输出频率指令LD M10.5EUMOVB 16#30, VB104MOVB 16#33, VB105MOVB 16#32, VB106MOVB 16#31, VB107MOVB 16#30, VB108MOVB 16#33, VB109MOVB 16#30, VB110MOVB 16#30, VB111MOVB 16#30, VB112MOVB 16#31, VB113S M20.0, 1CALL SBR1Network 12 // 当读取频率时,执行频率显示运算子程序LD SM4.5A M20.1CALL SBR2Network 13 // SMB86=0表示正在接收,但本例是利用中断来接收LDB<> SMB86, 0MOVB SMB86, VB400Network 14 // 发送完成标志LD SM4.5= Q0.0END_ORGANIZATION_BLOCKSUBROUTINE_BLOCK SBR_0:SBR0TITLE=通信初始化参数子程序BEGINNetwork 1 // 初始化通信参数及定义开始符、终止符等接收信息LD SM0.0MOVB 16#69, SMB30MOVB 16#E0, SMB88MOVB 16#3A, SMB89MOVB 18, SMB94Network 2 // 初始化固定参数LD SM0.0MOVB 16#3A, VB101MOVB 16#30, VB102MOVB 16#31, VB103MOVB 16#0D, VB116MOVB 16#0A, VB117Network 3 // 声明使用发送完成中断LD SM0.0ATCH INT0, 9ENIEND_SUBROUTINE_BLOCKSUBROUTINE_BLOCK SBR_1:SBR1TITLE=计算校验及子程序BEGINNetwork 1 // 建立指针及参数清零等初始化LD SM0.0MOVD &VB101, VD131MOVW 0, VW129MOVW 6, VW127MOVW 0, AC0MOVW 0, AC1MOVW 0, AC2MOVW 0, AC3Network 2 // 循环计算原始累加和LD SM0.0FOR VW125, 1, VW127Network 3LD SM0.0LPSMOVW *VD131, AC0 ANDW 16#FF, AC0 AB> AC0, 16#39 MOVW AC0, AC1-I 16#37, AC1 LRDAB<= AC0, 16#39 MOVW AC0, AC1-I 16#30, AC1 LRDINCD VD131LRDMOVW *VD131, AC0 ANDW 16#FF, AC0 LRDAB> AC0, 16#39 MOVW AC0, AC2-I 16#37, AC2 LRDAB<= AC0, 16#30 MOVW AC0, AC2-I 16#30, AC2 LRDSLB AC1, 4LRDMOVW AC1, AC3+I AC2, AC3 LRD+I AC3, VW129 LPP+D 1, VD131 Network 4NEXTNetwork 5 // 指针加一,指向下一个LD SM0.0MOVW 0, AC2MOVW 0, AC3+D 1, VD131Network 6LD SM0.0LPSMOVW 16#FF, AC0ANDW VW129, AC0INVW AC0MOVW 1, VW800+I AC0, VW800MOVB VB801, AC2SRB AC2, 4AW> AC2, 9+I 16#37, AC2LRDMOVB AC2, *VD131LRD+D 1, VD131LRDMOVB VB801, AC3ANDB 16#0F, AC3LRDAW> AC3, 9+I 16#37, AC3LRDAW<= AC3, 9+I 16#30, AC3LPPMOVB AC3, *VD131Network 7 // 发送前,强行禁止接收LD SM0.0MOVB 16#70, SMB87RCV VB200, 0Network 8 // 开始发送LD SM0.0MOVB 17, VB100XMT VB100, 0FILL 0, VW200, 9Network 9 // 发送后允许接收LD SM0.0MOVB 16#F0, SMB87END_SUBROUTINE_BLOCKSUBROUTINE_BLOCK SBR_2:SBR2TITLE=频率显示运算子程序VARLIN1:DWORD;lLIN2:DWORD;LIN3:DWORD;LIN4:DWORD;END_VARBEGINNetwork 1 // 把接收到的16进制ASCII码信息,转换成习惯的小数点形式LD SM0.0BTI VB2008, LW0BTI VB2009, LW2BTI VB2010, LW4BTI VB2011, LW6Network 2LD SM0.0LPSAW> LW0, 16#40 MOVW LW0, AC0-I 16#37, AC0 LPPAW< LW0, 16#40 MOVW LW0, AC0-I 16#30, AC0 Network 3LD SM0.0LPSAW> LW2, 16#40 MOVW LW2, AC1-I 16#37, AC1 LPPAW< LW2, 16#40 MOVW LW2, AC1-I 16#30, AC1 Network 4LD SM0.0LPSAW> LW4, 16#40 MOVW LW4, AC2-I 16#37, AC2 LPPAW< LW4, 16#40 MOVW LW4, AC2-I 16#30, AC2 Network 5LD SM0.0LPSAW> LW6, 16#40 MOVW LW6, AC3-I 16#37, AC3 LPPAW< LW6, 16#40 MOVW LW6, AC3-I 16#30, AC3 Network 6LD SM0.0MOVB AC0, LB8SLB LB8, 4MOVB AC2, LB9SLB LB9, 4Network 7LD SM0.0MOVB LB8, VB3200 ORB AC1, VB3200 Network 8LD SM0.0MOVB LB9, VB3201 ORB AC3, VB3201 Network 9LD SM0.0ITD VW3200, VD3300 DTR VD3300, VD3304 MOVR VD3304, VD3308 /R 100.0, VD3308 Network 10LD SM0.0R M20.1, 1END_SUBROUTINE_BLOCKSUBROUTINE_BLOCK SBR_3:SBR3TITLE=输出频率通信格式整理子程序BEGINNetwork 1 // 凡是有输出频率,频率改变LD SM0.0MOVB 16#30, VB104MOVB 16#36, VB105MOVB 16#32, VB106MOVB 16#30, VB107MOVB 16#30, VB108MOVB 16#31, VB109MOVW VW135, VW137MOVW 0, AC0MOVW 0, AC1MOVW 0, AC2MOVW 0, AC3Network 2LD SM0.0LPSMOVB VB137, AC0ANDB 16#0F, AC0AW> AC0, 9+I 16#37, AC0LRDAW<= AC0, 9+I 16#30, AC0LRDITB AC0, VB111LRDMOVB VB138, AC1ANDB 16#0F, AC1LRDAW> AC1, 9+I 16#37, AC1 LRDAW<= AC1, 9+I 16#30, AC1 LPPITB AC1, VB113 Network 3LD SM0.0LPSMOVW VW137, VW139 SRW VW139, 4 MOVB VB139, AC2 ANDB 16#0F, AC2 AW> AC2, 9+I 16#37, AC2 LRDAW<= AC2, 9+I 16#30, AC2 LRDITB AC2, VB110 LRDMOVB VB140, AC3 ANDB 16#0F, AC3 LRDAW> AC3, 9+I 16#37, AC3 LRDAW<= AC3, 9+I 16#30, AC3 LRDITB AC3, VB112LRDMOVW VW135, VW145LPPCALL SBR1END_SUBROUTINE_BLOCKINTERRUPT_BLOCK INT_0:INT0TITLE=发送完成中断程序BEGINNetwork 1 // 除读取频率其他指令返回信息LD M20.0RCV VB200, 0Network 2 // 读取频率返回信息LD M20.0RCV VB2000, 0S M20.1, 1R M20.0, 1END_INTERRUPT_BLOCK。