力学基础(哈工大导航原理、惯性技术课件2)
合集下载
L1-导航原理(哈工大导航原理、惯性技术课件)讲解学习
陶瓷 壳体
球形 转子
球形电极 自转轴
钛离子泵
缺陷:结构复杂、昂贵
Lecture 1 -- Introduction
23
5.2 低成本、小型化
环形激光陀螺 (Ring laser gyro -- RLG) 1960s 早期开始研制, 1970s 后期进入实用
光纤陀螺 (Fiber Optical Gyro – FOG) 1970s 开始研制, 1980s 早期进入实用
15
4.2 历史: 陀螺罗经
陀螺仪被寄予希望, 但面临着自动寻北 的挑战
1908年, Anschutz (德国) 发明了陀螺罗经 (gyro compass)
1909年, Sperry (美国) 也独 立研制出陀螺罗经.
—— 陀螺罗经的出现标志着陀螺仪技术 的现代应用的发端
Lecture 1 -- Introduction
Lecture 1 -- Introduction
14
4.2 历史: 在航海的应用
磁罗盘 (Magnetic compass) 被用于早期的航海
19世纪后期,大量的木质 轮船被钢铁材质的轮船取代, 使磁罗盘的效能受到影响.
磁罗盘的使用在地球两极 附近受到限制 寻找替代的方向指示装置
Lecture 1 -- Introduction
Exam: Close book, close note Contact: 15204694662
Lecture 1 -- Introduction
28
此课件下载可自行编辑修改,仅供参考! 感谢您的支持,我们努力做得更好!谢谢
t
S
S0
Vdt
0
惯性导航的特点: 自主 (Autonomous, self-contained) 只依赖于对载体的惯性测量 (借助加速度计、陀螺仪) 连续稳定的输出
惯性技术课件2 --陀螺力学基础(哈工大版,1-16全)教材
x1 X
z1 Z
y1 Y cos Z sin
z1 Y sin Z cos
Z cos
或 x1 1
y1
0
0
cos
0 X
sin
Y
y1
Y cos
Z sin
Y
z1 0 sin cos Z
X x1
Y sin
Lecture 2 -- Mechanical Fundmentals
R
d~R dt
R
d~ 2 R dt 2
d~ R
dt
2 d~R
dt
( R)
Ar
Ae
相对 牵连切向
Ak
苛氏
Ane
牵连法向
Lecture 2 -- Mechanical Fundmentals
18
3.5*苛氏加速度: 示例
~
Ak
2
dR dt
相对运动 -- 沿径向向外
牵连运动 -- 圆盘的转动
0 X 1 0 X
y
0
1
0
0
cos
sin
Y
0
1
Y
z sin 0 cos 0 sin cos Z 1 Z
(小角度近似)
Lecture 2 -- Mechanical Fundmentals
12
Outline
关于地球 相关的坐标系和坐标变换 柯氏定律和柯氏加速度 动量矩定理
则
d~B
dBx
i
dBy
j
dBz
k
dt dt dt dt
i jk
B x y z
Bx By Bz
Lecture 2 -- Mechanical Fundmentals
导航系统-惯性导航PPT课件

Rh Rh
VE
R hcos
V sin
R hcos
N VN
ψ
沿东向轴的变化: 沿北向轴的变化: 沿垂直轴向的变化:
E
VN Rh
V cos
Rh
N
cos
V sin
Rh
Z
sin
V R
h
sin
tg
2021年3月17日
导航系统
V VE E
23
导航系统--区域导航 地理坐标系相对于惯性系的运动角速度
导航系统--区域导航
导航系统课程内容
传统导航
➢ 仪表导航 ➢ 无线电导航
区域导航
➢ 简单区域导航(DME/DME、DME/VOR)
➢ 惯性导航
所需导航性能
➢ RNP参数
基于性能的导航(PBN)
2021年3月17日
导航系统
1
导航系统--区域导航
惯性导航概述
惯性导航系统功能
➢ 自动测量飞机各种导航参数及飞机控制参数,供飞行员使用 ➢ 与飞机其他控制系统相配合完成对飞机的人工或自动控制
2021年3月17日
导航系统
13
导航系统--区域导航
机体系与地理系之间的关系
地理系向机体系转换:
俯仰 XB
XG
γ:倾斜 XB
YG
:俯仰
YB
ZG ψ:真航向
ZB
倾斜 YB
XB 偏航
2021年3月17日
导航系统
ZB ZB
YB
14
导航系统--区域导航
坐标系变换
V
x
y
V
'
x' y'
则 V ' CV
VE
R hcos
V sin
R hcos
N VN
ψ
沿东向轴的变化: 沿北向轴的变化: 沿垂直轴向的变化:
E
VN Rh
V cos
Rh
N
cos
V sin
Rh
Z
sin
V R
h
sin
tg
2021年3月17日
导航系统
V VE E
23
导航系统--区域导航 地理坐标系相对于惯性系的运动角速度
导航系统--区域导航
导航系统课程内容
传统导航
➢ 仪表导航 ➢ 无线电导航
区域导航
➢ 简单区域导航(DME/DME、DME/VOR)
➢ 惯性导航
所需导航性能
➢ RNP参数
基于性能的导航(PBN)
2021年3月17日
导航系统
1
导航系统--区域导航
惯性导航概述
惯性导航系统功能
➢ 自动测量飞机各种导航参数及飞机控制参数,供飞行员使用 ➢ 与飞机其他控制系统相配合完成对飞机的人工或自动控制
2021年3月17日
导航系统
13
导航系统--区域导航
机体系与地理系之间的关系
地理系向机体系转换:
俯仰 XB
XG
γ:倾斜 XB
YG
:俯仰
YB
ZG ψ:真航向
ZB
倾斜 YB
XB 偏航
2021年3月17日
导航系统
ZB ZB
YB
14
导航系统--区域导航
坐标系变换
V
x
y
V
'
x' y'
则 V ' CV
ppt版本-哈工大版理论力学课件(全套)

理论力学课程的内容包括质点和刚体的运动、弹性力学、 流体力学、振动和波等,其体系由静力学、运动学和动力 学三个部分组成。
理论力学课程的内容非常广泛,主要包括质点和刚体的运 动、弹性力学、流体力学、振动和波等方面的知识。这些 内容在理论力学体系中占据着重要的地位,为后续的工程 技术和科学研究提供了重要的理论基础和应用方法。同时 ,理论力学体系由静力学、运动学和动力学三个部分组成 ,这三个部分相互联系、相互渗透,构成了完整的理论力 学体系。
详细描述
理论力学作为经典力学的一个重要分支,主要研究物体运动规律、力的作用机制以及它们之间的相互作用。通过 对质点和刚体的运动规律、力的合成与分解、动量守恒和能量守恒等基本原理的研究,理论力学为各种工程技术 和科学研究提供了重要的理论基础和应用方法。
理论力学课程的内容和体系
要点一
总结词
要点二
详细描述
置和速度。
刚体的转动
02
描述刚体绕固定点或轴线的旋转运动,通过角速度矢量和角加
速度矢量表示刚体的转动状态。
刚体的复合运动
03
描述刚体同时存在的平动和转动,通过平动和转动运动的合成
来描述。
刚体的动力学方程
牛顿第二定律
表述了物体运动与力的关系,即物体受到的合外力等 于其质量与加速度的乘积。
动量定理
表述了物体动量的变化率等于作用在物体上的力与时 间的乘积。
由于非惯性参考系中物体受到的力不是真实的外力,而是由于参考 系加速或旋转产生的惯性力。
非惯性参考系的应用
在研究地球上的物体运动时,常常需要用到非惯性参考系,例如研 究地球的自转和公转对物体运动的影响。
05
刚体的运动
01
描述刚体在空间中的位置和运动,通过平动矢量表示刚体的位
《惯性导航系统》课件
软件温度补偿
通过算法对温度变化引起的误差进 行估计和补偿,提高导航精度。
混合温度补偿
结合硬件和软件温度补偿的优势, 进一步提高导航精度。
05
惯性导航系统发展现状与 趋势
国内外研究现状
国内研究现状
国内在惯性导航系统领域的研究起步较晚,但近年来发展迅速,取得了一系列重要成果。国内的研究 主要集中在技术研发、系统集成和实际应用等方面,涉及的领域包括航空、航天、航海、机器人等。
陀螺仪的精度和稳定性对惯性导航系 统的性能有着至关重要的影响。
它通过高速旋转的陀螺仪能够感知方 向的变化,并将这些变化转化为电信 号,以供其他组件使用。
不同类型的陀螺仪(如机械陀螺仪、 光纤陀螺仪、激光陀螺仪等)具有不 同的特点和应用场景。
加速度计
01
加速度计用于测量物体在惯性参 考系下的加速度。
动态调整初始对准过程中的参数。
动态误差与扰动误差
要点一
动态误差与扰动误差
在动态环境下,惯性导航系统会受到各种扰动因素的影响 ,如车辆颠簸、气流扰动等。这些扰动因素会导致系统输 出数据出现偏差,从而影响导航精度。为了减小这些误差 ,可以采用多种技术手段,如滤波算法、卡尔曼滤波等。
要点二
卡尔曼滤波
卡尔曼滤波是一种基于状态方程和观测方程的递归滤波算 法,可以对系统状态进行最优估计。通过将卡尔曼滤波算 法应用于惯性导航系统中,可以有效减小由于动态环境和 扰动因素引起的误差。此外,还可以采用其他先进的滤波 算法,如扩展卡尔曼滤波、粒子滤波等,根据实际情况选 择最适合的算法来减小动态误差与扰动误差。
案例分析:无人机导航系统
案例背景介绍
介绍无人机导航系统的应用场景和需求,阐述其重要性和挑战。
惯性导航原理ppt课件

代入上述投影变换式
Ve ' x'i y' j z' k q 1 P1i P2 j P3k
x'i y' j z'k
( P1i P2 j P3k) (xi yj zk) ( P1i P2 j P3k)
进行四元数乘法运算,整理运算结果可得
20
四元数表示转动 方向余弦
或简单表示为
q M v, P
12
四元数基本性质 乘法
2.四元数乘法
q M ( P1i P2 j P3k)(v 1i 2 j 3k)
(v P11 P2 2 P33 )
( 1 P1v P2 3 P32 )i
( 2 P2v P31 P13 ) j
( 3 P3v P12 P2 1 )k
7
6. 机体坐标系——
Oxb yb zb
机体坐标系是固连在机体上的坐标系。机 体坐标系的坐标原点o位于飞行器的重心处, x沿机体横轴指向右,y沿机体纵轴指向前, z垂直于oxy,并沿飞行器的竖轴指向上。
8
3.2四元数理论
9
四元数 表示
四元数:描述刚体角运动的数学工具 (quaternions) 针对捷联惯导系统,可弥补欧拉参数在描述和解算方面的不足。
四元数 映象图解
V xi yj zk
V x'i' y' j'z'k'
Ve xi yj zk Ve ' x'i y' j z' k
19
四元数表示转动 方向余弦
Ve ' q 1Ve q 将该投影变换式展开,也就是把
Ve xi yj zk q P1i P2 j P3k
Ve ' x'i y' j z' k q 1 P1i P2 j P3k
x'i y' j z'k
( P1i P2 j P3k) (xi yj zk) ( P1i P2 j P3k)
进行四元数乘法运算,整理运算结果可得
20
四元数表示转动 方向余弦
或简单表示为
q M v, P
12
四元数基本性质 乘法
2.四元数乘法
q M ( P1i P2 j P3k)(v 1i 2 j 3k)
(v P11 P2 2 P33 )
( 1 P1v P2 3 P32 )i
( 2 P2v P31 P13 ) j
( 3 P3v P12 P2 1 )k
7
6. 机体坐标系——
Oxb yb zb
机体坐标系是固连在机体上的坐标系。机 体坐标系的坐标原点o位于飞行器的重心处, x沿机体横轴指向右,y沿机体纵轴指向前, z垂直于oxy,并沿飞行器的竖轴指向上。
8
3.2四元数理论
9
四元数 表示
四元数:描述刚体角运动的数学工具 (quaternions) 针对捷联惯导系统,可弥补欧拉参数在描述和解算方面的不足。
四元数 映象图解
V xi yj zk
V x'i' y' j'z'k'
Ve xi yj zk Ve ' x'i y' j z' k
19
四元数表示转动 方向余弦
Ve ' q 1Ve q 将该投影变换式展开,也就是把
Ve xi yj zk q P1i P2 j P3k
惯性导航ppt课件
受任何干扰 、隐蔽性强 、输出信息量大 、输出信息实时性强
等优点 ,使其在军事领域和许多民用领域都得到了广泛的应
用 ,已被许多机种选为标准导航设备或必装导航设备 。
一、惯性导航技术的发展历史
图1.4 陀螺仪弹
惯性导航是一门涉及精密机械、计算机技术、微电子、光 学、自动控制、材料等多种学科和领域的综合技术。由于陀螺 仪是惯性导航的核心部件,因此,可以按各种类型陀螺出现的 先后、理论的建立和新型传感器制造技术的出现,将惯性技术 的发展划分为四代。
几种姿态结算是重点
三、惯导系统的分类
Bortz 和 Jordon 最早提出了等效旋转矢量概念用于陀 螺输出不可交换误差的修正, 从而在理论上解决了不可交换 误差的补偿问题, 其后的研究就主要集中在旋转矢量的求解 上 ,根据在相同姿态更新周期内 ,对陀螺角增量等间隔采样 数的不同 、有双子样算法、 三子样算法等 。为减少计算量 Gilmore 提出了等效旋转矢量双回路迭代算法Miller 讨论 了在纯锥运动环境下等效旋转矢量的三子样优化算法, 此后 ,在 Miller 理论的基础上 Jang G. Lee 和 Yong J.Yoon 对等效旋转矢量的四子样优化算法进行了研究。 Y.F.Jiang 对利用陀螺的角增量及前一更新周期采样值的算法进行了研究 , 研究结果表明, 采样阶数越高,更新速率越快 ,姿态更新 算法的误差就越小。 Musoff 提出了圆锥补偿算法的优化指 标, 分析了圆锥补偿后的算法误差与补偿周期幂次 r 的关系 。 这些理论研究奠定了姿态更新算法的经典理论基础 。
一、惯性导航技术的发展历史
图1.5 惯导技术发展历史
二、惯性传感器的最新发展现状
2.1陀螺仪 定义:传统意义上的陀螺仪是安装在框架中绕回转体的对
《哈工大理论力学》课件

总结词
动量守恒定律在物理学、工程学和天文 学等领域有着广泛的应用。
VS
详细描述
在碰撞、火箭推进、行星运动、相对论等 领域中,动量守恒定律都起着重要的作用 。通过应用动量守恒定律,可以预测系统 的运动状态和变化趋势,为实际应用提供 重要的理论支持。
04
角动量与角动量守恒定律
角动量的定义与计算
角动量的定义
体育竞技
在花样滑冰、冰球等体育项目 中,运动员通过改变身体姿态 来调整角动量,以完成各种高
难度动作。
05
万有引力定律
万有引力定律的表述
总结词
万有引力定律是描述两个质点之间由于它们 的质量而相互吸引的力的大小和方向的定律 。
详细描述
万有引力定律由艾萨克·牛顿提出,表述为 任意两个质点通过连心线方向上的力相互吸 引,该力的大小与它们质量的乘积成正比,
02
牛顿运动定律
牛顿运动定律的表述
第一定律(惯性定律)
除非受到外力作用,否则保持静止或匀速直线运动 的状态不变。
第二定律(动量定律)
物体的加速度与作用力成正比,与物体的质量成反 比。
第三定律(作用与反作用定律)
对于任何作用力,都存在一个大小相等、方向相反 的反作用力。
牛顿运动定律的应用
动力学问题
弹性力学的应用实例
总结词:实际应用
详细描述:弹性力学在工程领域有广 泛的应用,如桥梁、建筑、机械和航 空航天等。应用实例包括梁的弯曲、 柱的拉伸和压缩、壳体的变形等。
THANKS
感谢观看
提供理论基础和解决方案。
理论力学的发展历程
总结词
理论力学的发展经历了古典力学和相对论力学两个阶段,相对论力学对于高速运动和强引力场的研究具有重要意 义。
ppt版本——哈工大版理论力学课件全套02
解: 各力偶的合力偶矩为
Mm1m2m3m4 4(15)60Nm
由力偶只能与力偶平衡的性质, 力FA与力FB组成一力偶。
根据平面力偶系平衡方程有: FB 60 300N 0.2
FB0.2m1m2 m3 m4 0 FA FB 300 N
理论力学
36
[例]图示结构,已知M=800N.m,求A、C两点的约束力。
C
FBA 0.366G 7.321kN
负时,表示原先假 定的该力指向和实
FBC 1.366G 27.32 kN
际指向相反。
理论力学
16
理论力学
17
§2-2 平面力对点之矩 平·面力偶
力对物体可以产生 移动效应____ 取决于力的大小、方向 转动效应____取决于力矩的大小、转向
一、力对点之矩(力矩)
C
A
B
F
CB F' 1 CB CA
CA F
若CB=CA=CB+d 成立,且d≠0,必有CB→∞
即合力作用点在无穷远处,不存在合力。
理论力学
27
性质2:力偶对其所在平面内任一点的矩恒等于力偶矩,而 与矩心的位置无关,因此力偶对刚体的效应用力偶矩度量。
F′
A d
xB O
F C
MO(F)MO(F)F(xd)Fx Fd
2
2h
Fy 0 F CBsinq FCy 0
解得
F Cy 1.5kN
理论力学
15
[例]如图所示,重物G=20kN,用钢丝绳挂在支架的滑轮B 上,钢丝绳的另一端绕在铰车D上。杆AB与BC铰接,并以
铰链A,C与墙连接。如两杆与滑轮的自重不计并忽略摩擦
和滑轮的大小,试求平衡时杆AB和BC所受的力。 A
Mm1m2m3m4 4(15)60Nm
由力偶只能与力偶平衡的性质, 力FA与力FB组成一力偶。
根据平面力偶系平衡方程有: FB 60 300N 0.2
FB0.2m1m2 m3 m4 0 FA FB 300 N
理论力学
36
[例]图示结构,已知M=800N.m,求A、C两点的约束力。
C
FBA 0.366G 7.321kN
负时,表示原先假 定的该力指向和实
FBC 1.366G 27.32 kN
际指向相反。
理论力学
16
理论力学
17
§2-2 平面力对点之矩 平·面力偶
力对物体可以产生 移动效应____ 取决于力的大小、方向 转动效应____取决于力矩的大小、转向
一、力对点之矩(力矩)
C
A
B
F
CB F' 1 CB CA
CA F
若CB=CA=CB+d 成立,且d≠0,必有CB→∞
即合力作用点在无穷远处,不存在合力。
理论力学
27
性质2:力偶对其所在平面内任一点的矩恒等于力偶矩,而 与矩心的位置无关,因此力偶对刚体的效应用力偶矩度量。
F′
A d
xB O
F C
MO(F)MO(F)F(xd)Fx Fd
2
2h
Fy 0 F CBsinq FCy 0
解得
F Cy 1.5kN
理论力学
15
[例]如图所示,重物G=20kN,用钢丝绳挂在支架的滑轮B 上,钢丝绳的另一端绕在铰车D上。杆AB与BC铰接,并以
铰链A,C与墙连接。如两杆与滑轮的自重不计并忽略摩擦
和滑轮的大小,试求平衡时杆AB和BC所受的力。 A
工学陀螺及惯性技术课件PPT56页

Kg
0
0 cos0t 0 Kg
T 2 1 84.4 min
Kg
1 R K
第54页,共56页。
舒拉调整平台
0 cos0t 0 Kg
T 2 1 84.4 min
Kg
1 R K
用积分陀螺代替积分器:
H R K
第55页,共56页。
作业
P117-1,2,5,7,8
第56页,共56页。
尺寸
重量
转速
动量矩H
阻尼系数C 输出轴惯量J
Ф4.6×9.8cm 522 gf
24000 r/min 151000
502 225
G(s)=1, C2=5, τ=1ms
SystemView仿真结果
第19页,共56页。
单轴平台系统方块图之二
Y (s)
JP J s4
JP (J
( s 1)(Js C) C)s3 (JPC H 2 )s2
二自由度陀螺仪平台的方程
K K1K2Kt H
K K2Kt H
K3 (s)
J ps2 KG(s) KG(s)
{s 2 [ J
ps2
KG(s)]
K
K1K2Kt K3 (s)KG(s)g }
HR
(s)
0
{s2[
J
p
s2
KG(s)]
(J
p
s
2
KGபைடு நூலகம்s))
g }
R
(s)
0
{(s2
g )[J R
ps2
(11s)(1 2s)K
JPs2 (1 T1s)(1 T2s)
第36页,共56页。
5.4 半解析式惯导系统的修正回路
《惯性导航系统》课件

轨道监测。
惯较高的测量精度,适用于精密导航和定位。
可靠性
不受外界环境干扰,适用于复杂环境和恶劣条件。
鲁棒性
不受信号遮挡和干扰,适用于密集城市和山区等特殊环境。
惯性导航系统的发展趋势
1
集成化
将惯性传感器和导航算法集成在一起,提高系统性能。
2
精度提升
《惯性导航系统》PPT课
件
本课件介绍了惯性导航系统的定义、组成和原理,以及在航空、航海、矿业
和地震勘探等领域的应用场景。
什么是惯性导航系统
惯性导航系统是一种利用惯性传感器测量和计算对象运动状态和位置的系统。
惯性导航系统的应用场景
1
航空 ✈️
2
飞机、无人机等飞行器的导航和姿态控
航海 ⛵️
船舶的导航、位置定位和目标跟踪。
引入更精密的传感器技术和导航算法,提高导航精度。
3
多源数据融合
融合其他导航系统数据,提高位置和姿态的准确性。
惯性导航系统的应用前景
航空航天领域
工业制造领域
军事领域
飞行器导航、姿态控制和自主
机器人导航、定位和轨迹规划
武器系统导航、目标跟踪和战
导航技术的重要组成部分。
的关键技术。
场监测的重要手段。
结论
惯性导航系统在现代导航领域具有重要作用,随着技术的不断发展,其应用
前景将更加广泛。
制。
3
矿业 ⛏️
地下矿场的测量和导航。
4
地震勘探
地震仪的定位和震源分析。
惯性导航系统与其他导航系统的比较
GPS
北斗卫星导航系统
轨道测量系统
全球卫星定位系统,依赖卫
中国自主建设的卫星导航系
惯性导航原理ppt课件

四元数的表示
由一个实单位和三个虚数单位 i, j, k 组成的数
q 1 P1i P2 j P3k
或者省略 1,写成
q P1i P2 j P3k
i, j, k 服从如下运算公式:
10
四元数 组成部分
i, j, k 服从如下运算公式
i i j j k k 1 i j ji k j k k j i k i i k j
22
为特征四元数 (范数为 1 )
四元数既表示了转轴方向,又表示了转角大小(转动四元数)
16
四元数表示转动 矢量旋转
如果矢量 R 相对固定坐标系旋转,旋转四元数为 q,转动后 的矢量为 R’,则这种转动关系可通过四元数旋转运算来实现
1.四元数加减法
qM ( v) (P1 1 )i (P2 2 ) j (P3 3 )k
或简单表示为
q M v, P
12
四元数基本性质 乘法
2.四元数乘法
q M ( P1i P2 j P3k)(v 1i 2 j 3k)
所在位置的东向、北向和垂线方向的坐标 系。地理坐标系的原点选在飞行器重心处, x指向东,y指向北,z沿垂线方向指向天 (东北天)。
5
4. 导航坐标系—— Ox n yn zn 导航坐标系是在导航时根据导航系统工作
的需要而选取的作为导航基准的坐标系。 指北方位系统:导航坐标系与地理坐标系 重合;自由方位系统或游动自由方位系统:
(v P11 P2 2 P33 )
( 1 P1v P2 3 P32 )i
( 2 P2v P31 P13 ) j
( 3 P3v P12 P2 1 )k
由一个实单位和三个虚数单位 i, j, k 组成的数
q 1 P1i P2 j P3k
或者省略 1,写成
q P1i P2 j P3k
i, j, k 服从如下运算公式:
10
四元数 组成部分
i, j, k 服从如下运算公式
i i j j k k 1 i j ji k j k k j i k i i k j
22
为特征四元数 (范数为 1 )
四元数既表示了转轴方向,又表示了转角大小(转动四元数)
16
四元数表示转动 矢量旋转
如果矢量 R 相对固定坐标系旋转,旋转四元数为 q,转动后 的矢量为 R’,则这种转动关系可通过四元数旋转运算来实现
1.四元数加减法
qM ( v) (P1 1 )i (P2 2 ) j (P3 3 )k
或简单表示为
q M v, P
12
四元数基本性质 乘法
2.四元数乘法
q M ( P1i P2 j P3k)(v 1i 2 j 3k)
所在位置的东向、北向和垂线方向的坐标 系。地理坐标系的原点选在飞行器重心处, x指向东,y指向北,z沿垂线方向指向天 (东北天)。
5
4. 导航坐标系—— Ox n yn zn 导航坐标系是在导航时根据导航系统工作
的需要而选取的作为导航基准的坐标系。 指北方位系统:导航坐标系与地理坐标系 重合;自由方位系统或游动自由方位系统:
(v P11 P2 2 P33 )
( 1 P1v P2 3 P32 )i
( 2 P2v P31 P13 ) j
( 3 P3v P12 P2 1 )k
惯性导航系统_牛小骥_课件2a
2
Az. Misalignment = 35 arc-min
101
Gyro Angle Random Walk deg./rt-h
102
陀螺噪声对初始对准的影响
航向角精度依赖于?
Min. Alignment time
Az. Misalignment = 3 deg.
Az. Misalignment = 5 deg.
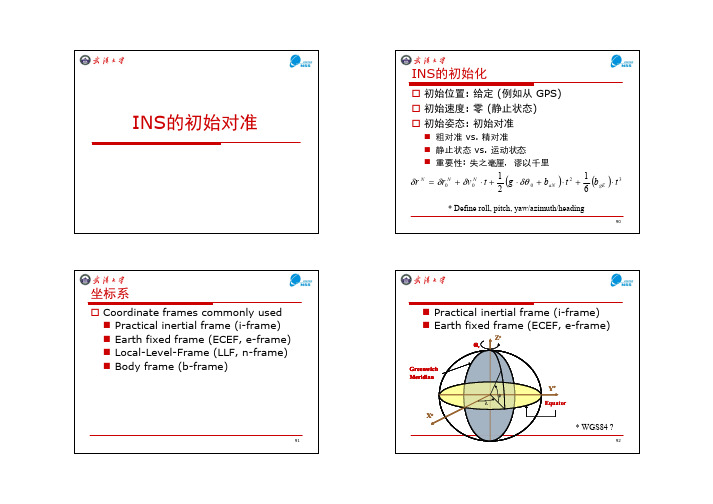
ωie ⋅ cos φ n ωie = 0 ωie ⋅ sin φ
υ = γ × ωie
g
[γ
n
ω
n ie
υ ] = C ⋅ [γ
n n b
b
ω
b ie
υ
b
]
φ
105 106
姿态的表示方法(续)
INS 算法
Normal Gravity +
fb
Rb
+ _Байду номын сангаас
V
∫
V
∫
ϕ, λ, h
Gyro Drift = 0.2 deg/hr
HG1700 LTN-200
Gyro Drift = 0.02 deg/hr
Gyro Drift = 0.02 deg/hr Gyro Drift = 1 deg/hr
Latitude (deg)
99
Latitude (deg)
100
陀螺噪声对初始对准的影响 - 时间 vs. 精度
Ze
ωe
Greenwich Meridian
Ye
φ λ
Equator
Xe
* WGS84 ?
91 92
Local-Level-Frame (LLF, n-frame)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Lecture 2 -- Mechanical Fundmentals
22
3.6 用柯氏加速度解释 河岸冲刷 用柯氏加速度解释:
现象: 现象 南北方向的河流两岸冲刷 的程度不一样. 的程度不一样
对北半球向北的河流, 东岸被冲刷 对北半球向北的河流 得更厉害. 得更厉害 该现象可以通过苛氏 (Coriolis) 加 速度得到解释. 速度得到解释
Z z1
z z'
O
对转子相对内框架绕转子轴转 γ 角
x' cos γ y ' = − sin γ z' 0
sin γ cos γ 0
0 x 0 y 1 z
X x x'
x1
Y y 1 y y'
Lecture 2 -- Mechanical Fundmentals
~ dB d B = +ω× B dt dt
Lecture 2 -- Mechanical Fundmentals
20
3.4 加速度合成定理
~ dR 速度: 速度 V= +ω × R dt 加速度: 加速度: ~ ~ ~ ~ dR dV d V d dR A= = + ω ×V = +ω × R +ω × +ω × R dt dt dt dt dt ~2 ~ ~ d R dω dR = 2 + × R + ω × (ω × R) + 2ω × dt dt dt
cosβ cosγ sinα sin β cosγ + cosα sinγ sinα sinγ − cosα sin β cosγ X = − cosβ sinγ cosα cosγ − sinα sin β sinγ cosα sin β sinγ + cosγ sinα Y sin β Z − sinα cosβ cosα cosβ
o
z
b
y
a
Lecture 2 -- Mechanical Fundmentals
4
1.3*关于地球 重力 关于地球: 关于地球
重力 (gravity) W 为万有引力 j 和地球自转引起的离心 (centrifugal) 力 F 之和: 之和: ωe
W = j+F
因为 F 远远小于 W,∆θ 最多只 , 有几个角分 g -- 取决于纬度和高度(将地球视 取决于纬度和高度( 为椭球体) 为椭球体).
都是小角度, 如果 α,β,γ 都是小角度, 则有近似: 则有近似:
x' 1 y ' = − γ z' β
γ
1 −α
− β X α Y 1 Z
16
Lecture 2 -- Mechanical Fundmentals
x1 = X y1 = Y cos α + Z sin α z1 = −Y sin α + Z cos α
或
z1
α
Z
Z cos α
y1
0 x1 1 y = 0 cos α 1 z1 0 − sin α
0 X sin α Y cos α Z
目前常用的几种参考椭球体: 目前常用的几种参考椭球体 Clarke Krasovski 国际椭球体 全球大地系 WGS a -- major axis b -- minor axis 扁率(oblateness) =(a - b)/ a 扁率 ( ) 曲率半径 (curvature radius -- 和纬度有关) 和纬度有关
X x’ y’ z’ Y Z
O
Y X x'
y'
C11 C21 C31
C12 C22 C32
C13 C23 C33
坐标系分步旋转的方法可以方便方向余弦矩阵的计算 。
Lecture 2 -- Mechanical Fundmentals
12
2.5 坐标系 顺序旋转 坐标系:
旋转顺序: 旋转顺序 外框架 相对基座转过 α角 角 内框架相对外框架 转过 β 角 转子相对内框架转过γ 转子相对内框架转过 角
方向余弦阵 (Direction cosine matrix)
Lecture 2 -- Mechanical Fundmentals
11
2.4 坐标系 以框架陀螺为例 坐标系:
Z z'
转子相对于基座的转动 转子(Rotor)坐标系 ox’y’z’ 坐标系 转子 基座(Base) 坐标系 OXYZ 基座 方向余弦矩阵 (Directional Cosine Matrix – DCM):
R
j
∆θ
W
P
F
Lecture 2 -- Mechanical Fundmentals
5
1.4 关于地球 垂线和纬度 关于地球:
纬度: 纬度:当地垂线和地球赤道平面之间的夹角 垂线的定义 地心垂线 -- 从地心到当地表面点的 连线 测地 (geodetic) 垂线 -- 当地椭球表 面的法线 沿着当地重力方向( 重力垂线 -- 沿着当地重力方向(天 文垂线 ) 和垂线的三种定义相对应, 和垂线的三种定义相对应,纬度也有三种定义
O
Z z1
z z'
引入内框架坐标系 xyz 和外框架 坐标系 x1y1z1 .
X x x'
x1
Y y 1
y y'
Lecture 2 -- Mechanical Fundmentals
13
2.6 坐标系 第一次旋转 坐标系:
外框架相对基座, 绕外框架轴转过α 外框架相对基座 绕外框架轴转过 角 假设一个向量 R 在两个坐标系中的投影分别是 (X, Y, Z) 和 (x1, y1, z1) , 则利用投影关系 则利用投影关系:
P
φ ' φa φ
Lecture 2 -- Mechanical Fundmentals
6
1.5*关于地球 运动 关于地球: 关于地球
地球相对惯性空间的运动包括各种成分,最主要的有: 地球相对惯性空间的运动包括各种成分,最主要的有:
逐日自转 绕太阳的公转 地球自转角速度: 地球自转角速度 -- 相对惯性空间的 -- 相对太阳的
ω
Z
M
V
~ dR d R V= = +ω × R dt dt
牵连(transport) 速度 绝对速度 = 相对速度 + 牵连
R
O X
Y
Lecture 2 -- Mechanical Fundmentals
19
3.3 推广 苛氏定律 推广:
~ dR V= +ω × R dt
苛氏定律 (Coriolis Theorem):对任何和运动有关的矢量 B : : 它的绝对变化率 = 相对变化率 对动坐标系) 相对变化率(对动坐标系 对动坐标系 + 牵连变化率 由动坐标系转 牵连变化率(由动坐标系转 动引起的) 动引起的
几乎所有导航问题都和地球相关. 几乎所有导航问题都和地球相关
地球表面是不规则的. 地球表面是不规则的 对地球形状的最粗糙近似 -- 球形
更精确的近似: 更精确的近似:参考椭球体 (reference ellipsoid)
Lecture 2 -- Mechanical Fundmentals
3
1.2 关于地球 参考椭球体 关于地球:
x' V ' = y ' z '
则
x' cos α 1 y ' = cos β 1 z ' cos γ 1
cos α 2 cos β 2 cos γ 2
cos α 3 x y cos β 3 cos γ 3 z
15
2.8 坐标系 转动变换的合成 坐标系:
将上述结果合并, 将上述结果合并,得到从基座到转子的变换矩阵 :
x' cos γ y ' = − sin γ z ' 0 sin γ cos γ 0 0 cos β 0 0 1 sin β 0 − sin β 1 0 1 0 0 cos α 0 cos β 0 − sin α 0 X sin α Y cos α Z
Lecture 2 -- Mechanical Fundmentals
7
Outline
关于地球 相关的坐标系和坐标变换 柯氏定律和Leabharlann 氏加速度 动量矩定理 欧拉动力学方程
Lecture 2 -- Mechanical Fundmentals
8
2.1 坐标系 惯性系 坐标系:
Solar-centered Inertial frame (SCI 日心惯性系 日心惯性系) Earth-centered inertial frame (ECI 地心惯性系) 地心惯性系)
Lecture 2 -- Mechanical Fundmentals
Outline
关于地球 相关的坐标系和坐标变换 柯氏定律和柯氏加速度 动量矩定理 欧拉动力学方程
Lecture 2 -- Mechanical Fundmentals
17
3.1*转动引起的牵连速度 转动引起的牵连速度
转动, 假设某刚体绕着固定点 O 以角速度 ω 转动, M 是刚体内的一点(相对刚体固定) 是刚体内的一点(相对刚体固定) M 的牵连 的牵连(transport) 速度为 速度为: v v v i j k V = ω × R = ωx ωy ωz (布桑公式 布桑公式) 布桑公式 x y z v r v = (ω y z − ω z y )i + (ω z x − ω x z ) j + (ω x y − ω y x)k 坐标系可以任意选取