二自由度陀螺与三自由度陀螺的区别
陀螺仪的作用

陀螺仪的作用第一大用途,导航。
陀螺仪自被发明开始,就用于导航,先是德国人将其应用在V1、V2火箭上,因此,如果配合GPS,手机的导航能力将达到前所未有的水准。
实际上,目前很多专业手持式GPS上也装了陀螺仪,如果手机上安装了相应的软件,其导航能力绝不亚于目前很多船舶、飞机上用的导航仪。
第二大用途,可以和手机上的摄像头配合使用,比如防抖,这会让手机的拍照摄像能力得到很大的提升。
第三大用途,各类游戏的传感器,比如飞行游戏,体育类游戏,甚至包括一些第一视角类射击游戏,陀螺仪完整监测游戏者手的位移,从而实现各种游戏操作效果。
有关这点,想必用过任天堂WII的兄弟会有很深的感受。
第四大用途,可以用作输入设备,陀螺仪相当于一个立体的鼠标,这个功能和第三大用途中的游戏传感器很类似,甚至可以认为是一种类型。
第五大用途,也是未来最有前景和应用范围的用途。
下面重点说说。
那就是可以帮助手机实现很多增强现实的功能。
增强现实是近期才冒出的概念,和虚拟现实一样,是计算机的一种应用。
大意是可以通过手机或者电脑的处理能力,让人们对现实中的一些物体有跟深入的了解。
如果大家不理解,举个例子,前面有一个大楼,用手机摄像头对准它,马上就可以在屏幕上得到这座大楼的相关参数,比如楼的高度,宽度,海拔,如果连接到数据库,甚至可以得到这座大厦的物主、建设时间、现在的用途、可容纳的人数等等。
它的原理陀螺仪原理是指陀螺仪工作的原理,螺旋仪是一种用来传感与维持方向的装置,基于角动量守恒的理论设计出来的。
陀螺仪主要是由一个位于轴心且可旋转的转子构成。
陀螺仪一旦开始旋转,由于转子的角动量,陀螺仪有抗拒方向改变的趋向。
陀螺仪多用于导航、定位等系统常用实例如手机GPS定位导航、卫星三轴陀螺仪定位。
陀螺仪基本上就是运用物体高速旋转时,角动量很大,旋转轴会一直稳定指向一个方向的性质,所制造出来的定向仪器。
不过它必需转得够快,或者惯量够大(也可以说是角动量要够大)。
航空仪表

航空仪表1.航空仪表按功用分:(1)飞行仪表(驾驶领航仪表)(2)发动机仪表(3)其他仪表系统(辅助仪表)2.标准海平面大气的参数:(1)气压Po=1.013hPa (760mmHg 或29,921inHg)(2)气温To=+15℃(3)密度3/kg 125.00m =ρ3.高度表能测量的参数:相对高度、绝对高度、标准气压高度(1)绝对高度:飞机在空中到海平面的距离绝对高度=相对高度+机场标高=真实高度+地点标高(2)相对高度:飞机从空中到某一既定机场地面的垂直距离。
(3)标准气压高度:(航线上使用)飞机从空中到标准气压海平面(即大气动力等于760mmHg )的垂直距离。
标准气压高度=相对高度+机场标准气压高度标准大气条件下:海压高=绝对高度场压高=相对高度4.气压式高度表的工作原理:气压式高度表是根据标准大气条件下高度与静压的对应关系,利用真空膜盒测静压,从而表示飞行高度。
5.气压式高度表的组成:感受元件、传送元件、指示元件、调整元件。
调整机构的作用:①选择高度基准面②测量不同种类的高度③修正气压方法误差6.高度表误差:(1)机械误差(2)方法误差:当实际大气条件下不符合标准大气条件时指示将出现误差。
方法误差包括:气压误差和气温误差7. 高气压→低气压 多指高温度→低温度 多指8.指示空速(IAS)仅与动压有关;指示空速表的敏感元件是开口膜合概念:空速表按海平面标准大气条件下动压与空速的关系得到的空速。
(反映了动压的大小即反映了作用在飞机上的空气动力的情况。
)9.真空速(TAS )(与静压、动压、温度有关)概念:飞机相对与空气运动的真实速度。
10.全静压系统的使用要求:(1)飞行前:①取下护套和堵塞并检查是否有脏物堵塞②全压管、静压孔、全静压管通电加温进行检查时间不超过1~2min ③全静压转换开关应放在正常位(2)飞行中:①大中型飞机在起飞前接通电加温开关,小型飞机在可能结冰的条件下,飞行时或飞行中接通加温。
陀螺仪基本知识惯性导航

电子信息工程学院
30
将大地水准体用 一个有确定参数的 旋转椭球体来逼近 代替(如椭球面与 真实大地水准面之 间的高度差的偏差 平方和最小),这 种旋转椭球体称为 参考椭球体,简称 参考椭球。
电子信息工程学院
31
国际通用参考椭球体
电子信息工程学院
32
WGS-84坐标系基本参数
(1)椭球长半径 (a) 6378137 2m;
电子信息工程学院
38
5.机体坐标系 OX BY(BMZBobile Frame,Body Frame )
机体坐标系与飞机固连,
用表示OX BYB,Z坐B 标原点 机O纵与轴飞一机致重,心重O与合Z飞,B 机O竖X与B轴飞
一致, O与Y飞B 机横轴一致。Fra bibliotekZB YB
XB
电子信息工程学院
39
6.平台坐标系OX pYpZ(pPlatform frame )
电子信息工程学院
33
二、惯性系统中常用的坐标系
在地球上进行导航,所定义的坐标系要将惯导系统 的测量值与地球的主要方向联系起来。因此涉及到了 各种不同的坐标系,主要有以下几类:
陀螺坐标系 地理坐标系 惯性坐标系 地球坐标系 载体坐标系
电子信息工程学院
34
1.陀螺坐标系oxyz
x轴:与陀螺内环轴一致,固连于内环上; z轴:与陀螺转子轴一致,固连于内环上;但不随转子转动; y轴:与oxy平面平行,大方向与外环一致,但一般不与外环轴一致
2.传感器:输出与被测量参数成一定关系的电信号 。如陀螺航向传感器,角速度传感器。
3.本身作为一个元部件,与其它自动控制元部件 组成各种陀螺装置。如陀螺稳定平台,惯性导 航系统等。
AV2011六月以后的真题

1.Reason模型的重要价值是什么?(没有原理,只要答重要价值)
2. 渐进式检查分哪两类,各类别主要工作内容
3. DDM的定义,怎样使偏离杆偏离?(题目跟这个意思差不多)
4. FMC有哪两个数据库?各存储什么内容?数据库为什么要定时更新?
雷达系统探测和近地警告风切变有何区别
书面4要素
3个层次的规章,最高级?
超速警告显示?
HF与 VHF区别?
新题: 近地警告的风切变与雷达扫瞄的风切变功能区别
1。大改小改是什么
2。情景意识
3高度表收发天线换了是多指还是少指
4航空公司如何与正在飞行的飞机联系
5积分驾驶仪工作原里
维修管理(这个记不清了)
HF和VHF的区别
5:如何缓解疲劳
适航证的定义,什么情况下颁发适航证
外部电源6个插头及E,F插钉的作用
FMCS系统的功用,如何与其他系统配合工作的
EACM的显示格式和内容
6:REASON模型
渐进式检查的分类并解释
9:ELT
TCAS的工作方式和流程
反航道进近
CCAR-43涉及的维修和改装的适用范围
怎么样进一步增强目视检查的可靠性
10:优秀领导者应具备的能力
ACARS如何与航空公司信息中心进行通信联络
适航指令的定义,哪种情况下颁发适航指令
恒流充电的优缺点
自动油门在ARM位时,飞机在地面或APP两种情况下,按压TOGA电门有什么不同?
11:GPS伪距
自动油门断开的条件
马赫配平的原理
航空陀螺仪
航空陀螺仪一、陀螺仪的基本知识陀螺玩具旋转时,能够直立在地上;而且转得愈快,立得也愈稳;即使给它一个冲击,也只是晃动而不会倒下。
陀螺的这种特性可以被利用来做成仪表用来测量飞机的姿态角、航向角和角速度。
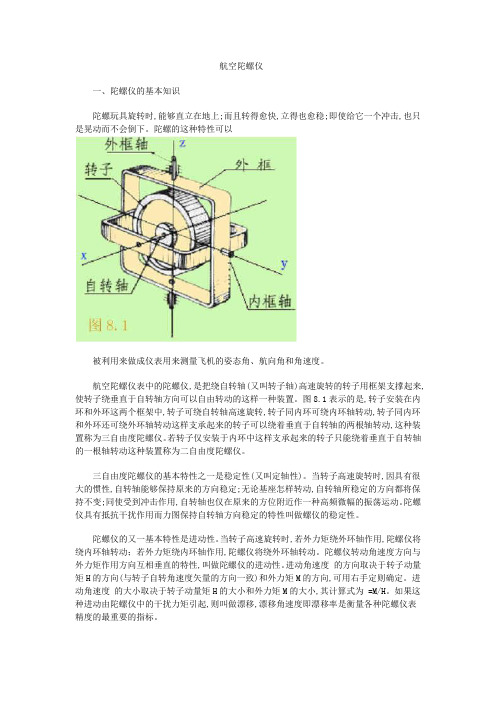
航空陀螺仪表中的陀螺仪,是把绕自转轴(又叫转子轴)高速旋转的转子用框架支撑起来,使转子绕垂直于自转轴方向可以自由转动的这样一种装置。
图8.1表示的是,转子安装在内环和外环这两个框架中,转子可绕自转轴高速旋转,转子同内环可绕内环轴转动,转子同内环和外环还可绕外环轴转动这样支承起来的转子可以绕着垂直于自转轴的两根轴转动,这种装置称为三自由度陀螺仪。
若转子仅安装于内环中这样支承起来的转子只能绕着垂直于自转轴的一根轴转动这种装置称为二自由度陀螺仪。
三自由度陀螺仪的基本特性之一是稳定性(又叫定轴性)。
当转子高速旋转时,因具有很大的惯性,自转轴能够保持原来的方向稳定;无论基座怎样转动,自转轴所稳定的方向都将保持不变;同使受到冲击作用,自转轴也仅在原来的方位附近作一种高频微幅的振荡运动。
陀螺仪具有抵抗干扰作用而力图保持自转轴方向稳定的特性叫做螺仪的稳定性。
陀螺仪的又一基本特性是进动性。
当转子高速旋转时,若外力矩绕外环轴作用,陀螺仪将绕内环轴转动;若外力矩绕内环轴作用,陀螺仪将绕外环轴转动。
陀螺仪转动角速度方向与外力矩作用方向互相垂直的特性,叫做陀螺仪的进动性。
进动角速度的方向取决于转子动量矩H的方向(与转子自转角速度矢量的方向一致)和外力矩M的方向,可用右手定则确定。
进动角速度的大小取决于转子动量矩H的大小和外力矩M的大小,其计算式为 =M/H。
如果这种进动由陀螺仪中的干扰力矩引起,则叫做漂移,漂移角速度即漂移率是衡量各种陀螺仪表精度的最重要的指标。
至于二自由度陀螺仪的特性,就与三自由度陀螺仪不同。
二自由度陀螺仪少了垂直于内环轴和自转轴方向的转动自由度。
这样,当基座绕着这个缺少自由度的轴线转动时,通过内环轴上一对轴承的推动,就强迫陀螺仪跟随基座转动;与此同时,基座作用于内环两端轴承上的推力形成了推力矩将强迫陀螺绕内环轴进动,使自转轴趋于基座转动角速度的方向重合。
王世锦《飞机仪表》第五章 陀螺和姿态系统仪表

若 ω≠0,L1≠L2 △L =ω4S/C 即 △L∝ω 两束激光的光程 差和转速成正比。
(式中:S为环形光 路包围的面积; C为 光速。)
两束激光的频率差和转速成正比
利用光电探测器,可以测量两束激光频率差 (干涉条纹将会移动,其移动速度的大小和方向反 映了角速度的大小和方向 ),从而得到载体的转 速。
方法:适当时候上锁,加快起动。
地平仪使用
正常使用条件: 1.电源正Biblioteka 或真空系统压力正常 2.警告旗升起
地平仪使用
空中使用—俯仰
地平仪使用
空中使用—倾斜
地平仪使用
平飞
平飞时有一定的迎角,参照升降速度 表调整。
地平仪使用
加速 加或减速时,惯性力使摆偏离地垂线, 对陀螺进行错误修正,使地平仪出现上仰 或下俯误差。用升降速度表和转弯侧滑仪 检查。
转弯侧滑仪
2、飞机倾斜角适当,指针在刻度盘左侧, 小球处于玻璃管中央。
转弯侧滑仪
3、倾斜角偏小,外侧滑,指针指左边,小 球在玻璃管右侧。
转弯侧滑仪
4、倾斜角偏大,内侧滑,指针指左边,小 球在玻璃管左侧。
5.3 航空地平仪
航空地平仪
测量飞机的俯仰角和倾斜角。
航空地平仪
俯仰角:飞机纵轴与地 平面的夹角,即飞机绕 横向水平轴转动的角度。
激光陀螺 (laser gyroscope)
应用: 在现代飞机上, 激光陀螺广泛用作惯 性导航系统的测量元 件,用来测量飞机三 维转动角速度。
5.2 转弯侧滑仪
转弯仪
指示飞机转弯的方向和快慢程度。
转弯仪
原理: 利用二自由度陀螺的进动性来测量飞 机的转弯方向,粗略反映转弯的快慢程度。
转弯仪
第三章 陀螺与姿态系统仪表分解

概述
飞机上用的姿态系统仪表,主要是指测量飞
机姿态角和姿态角速度的一些仪表。 飞机上使用的姿态显示仪表主要是指地平仪, 其次是指转弯仪和测滑仪。地平仪能直接显 示出飞机在空中的俯仰角和倾斜角,转弯仪 和测滑仪能帮助飞行员鉴别飞机在空中有无 转弯和测滑现象。
第一节 陀螺原理
始位置时,陀螺自转轴与飞机横轴平行,自 转角速度矢量指向左机翼;内框轴与飞机纵 轴平行,测量轴与飞机立轴平行。
转弯仪的特性:
1.
2. 3. 4.
飞机绕横轴或纵轴转动时,转弯仪不指示; 转弯仪的内框转角公式根据转弯仪安装情 况不同有所差别; 通常转弯仪陀螺自转轴是横向安装的; 转弯仪能够指示飞机无侧滑转弯时的倾斜 角。
一、地平仪的工作原理
(一)地平仪的基本组成环节和姿态角的测
量原理 利用摆和陀螺配合来模拟地垂线(?) 摆式地垂 修正器 三自由 度陀螺 指示部 分
控制机构
姿态角的测量
地平仪采用了摆和陀螺联合工作的方法,即
用摆的位置控制陀螺的自转轴位置。用陀螺 自转轴模拟出地垂线来完成。 当陀螺的自转轴偏离地垂线位置时,产生一 个与摆的偏差,将使修正器产生一信号带动 执行机构使陀螺自转轴进动,直至陀螺垂线 与摆垂线重合。当陀螺自转轴稳定在地垂线 位置时,修正机构不会产生力矩,陀螺不会 受外力矩作用,自转轴稳定不动。
运动不发生在力矩作用的方向,而是发生在
和它垂直的方向; 进动角速度在角动量一定时,对应于一个外 力矩只有一个进动角速度; 当外力矩停止作用时,进动运动立即停止。
图3-1-9 自行车的陀螺效应
二、三自由度陀螺的特性(续)
(三)稳定性与进动性的关系
陀螺的结构名称

陀螺的结构名称陀螺的结构名称陀螺是一种旋转体,旋转时呈现出稳定性和惯性的特点,可以被用于许多领域,如导航、陀螺仪等。
陀螺的结构名称根据不同的特点和分类,可分为以下几类。
1.基于自由度的分类基于自由度的分类方式,包括一维陀螺、二维陀螺和三维陀螺。
一维陀螺仅具有一个旋转自由度,常常被用于仪器和玩具中。
它的结构相对简单,由一个旋转轴和转轮组成。
二维陀螺是具有两个旋转自由度的陀螺,它的结构更加复杂,包括转轮、支撑轮、绞盘、编码器等部分。
它被广泛应用于导航系统、慣性導航系統等领域。
三维陀螺具有三个旋转自由度,主要应用于导航和稳定平台系统等领域。
它的结构相对复杂,由转轮、三组稳定环组成。
稳定环的作用是使转轮保持垂直方向稳定,提高了陀螺的稳定性和精度。
2.基于工作原理的分类基于工作原理的分类方式,包括空气悬浮式陀螺、机械支撑陀螺和电磁悬浮式陀螺。
空气悬浮式陀螺采用气浮支撑,旋转轴是通过气体泵产生气体层,使转轮悬浮在空中,并可以对转轮进行控制。
其优点是结构简单、寿命长、精度高。
机械支撑陀螺采用机械支撑方式,它的结构复杂,包括编码器、测量装置、多个轴承及其支撑装置等。
机械支撑陀螺可以达到非常高的精度和灵敏度,是导航等领域常用的陀螺之一。
电磁悬浮式陀螺采用电磁力控制转轮的位置和姿态,以实现转轮的稳定性和精度。
其优点是噪声小、寿命长,精度高。
3.基于应用的分类基于应用的分类方式,包括导航陀螺、稳定平台陀螺和陀螺仪。
导航陀螺被广泛应用于导航系统、陀螺罗盘、地震学和空间测量等领域,主要用于测量移动运动、姿态角和地球自转的角速度等。
稳定平台陀螺目的是使平台水平,确保安装在平台上的仪器在运动时保持姿态稳定。
稳定平台陀螺具有高精度、高可靠性等优点,可以用于地震学、航空航天和军事等领域。
陀螺仪是一种利用陀螺效应测量转速和角速度的仪器,被广泛应用于航空航天、导弹、火箭等领域。
陀螺仪结构相对简单,由转轮、电磁元件、控制电路等构成。
综上所述,陀螺的结构名称根据不同的特点和分类,可以分为一维陀螺、二维陀螺和三维陀螺,空气悬浮式陀螺、机械支撑陀螺和电磁悬浮式陀螺,以及导航陀螺、稳定平台陀螺和陀螺仪。
二自由度陀螺与三自由度陀螺的区别
二自由度陀螺仪的转子支撑在一个框架内,没有外框架,因而转子自转有一个进动自由度,即少了垂直于内框架轴和自转轴方向的转动自由度。
因此二自由度陀螺仪与三自由度陀螺仪的特性也有所不同。
进动性是三自由度陀螺仪的基本特征之一,当绕内框轴作用外力矩时,将使高速旋转的转子自转轴产生绕外框架轴的进动,而绕外框架轴作用外力矩是,将使转子轴产生绕内框架轴的进动。
定轴性是三自由度陀螺仪的另一基本特征。
无论基座绕陀螺仪自转轴转动,还是绕内框架轴或外框架轴方向转动,都不会直接带动陀螺转子一起转动(指转子自转之外的转动)。
由内、外框架所组成的框架装置,将基座的转动与陀螺转子隔离开来。
这样,如果陀螺仪自转轴稳定在惯性空间的某个方位上,当基座转动时,它仍然稳定在原来的方位上。
对于二自由度陀螺仪,当基座绕陀螺仪自转轴或内框架轴方向转动时,仍然不会带动转子一起转动,即内框架仍然起隔离运动的作用。
但是,当基座绕陀螺仪缺少自由度的X轴方向以角速度ωX转动时,由于陀螺仪绕该轴没有转动自由度,所以基座转动时,就通过内框架轴上的一对支承带动陀螺转子一起转动。
但陀螺仪自转轴仍尽力保持其原来的空间方位不变。
因此,基座转动时,内框架轴上的一对支承就有推力F作用在内框架轴的两端,而形成作用在陀螺仪上的推力矩mx,其方向垂直于动量矩H,并沿X轴正向。
由于陀螺仪绕内框架轴有转动的自由度,所以这个推力矩就使陀螺仪产生绕内框架轴的进动,进动角速度β指向内框架轴y的正向,使转子轴趋向与x轴重合。
因此,当基座绕陀螺仪缺少自由度的方向转动时,将强迫陀螺仪跟随基座转动,同时陀螺仪转子轴绕内框架轴进动。
结果使转子轴趋向与基座转动角速度的方向重合。
即二自由度陀螺仪具有敏感绕其缺少转动自由度方向旋转角速度的特性。
二自由度陀螺仪受到沿内框架轴向外力矩作用时,转子轴绕内框轴运动。
沿内框架轴向作用力矩时转子轴的运动。
设沿内框架轴y的正向有外力矩My作用,则二自由度陀螺仪的转子轴将力图以角速度My/H绕x轴的负向进动,由于陀螺转子轴绕x轴方向不能转动,这个进动是不可能实现的。
大气数据与惯导系统-第三章知识点

第三章内容171543517 马千里 1.二自由陀螺进动特性设二自由度陀螺以角速度自转,自转角速度的矢量朝左。
同时,内框又带着转子绕y 轴转动,牵连角速度w 矢量朝上。
在自转角速度和牵连角速度的共同作用下,二自由度陀螺会产生绕内框轴的陀螺力矩L ,其方向朝前。
在此力矩的作用下,陀螺以角速度W 进绕内框轴转动,称为二自由度陀螺的进动。
作用:测量飞机的角速度和角位移。
二自由度陀螺进动方向与陀螺力矩方向一致,即牵连角速度方向绕转子自转方向转过90度的方向。
二、二自由度陀螺的受迫运动:在当二自由度陀螺沿内框轴有外力矩作用时,由于陀螺不能绕y 轴转动,因而也就不能绕内框轴产生陀螺力矩同外力矩平衡; 外力矩的作用下,陀螺将像普通物体一样,加速转动;外力矩消失后,陀螺并不停止转动,而像普通物体一样等速旋转; 二自由度陀螺的这种运动称为受迫运动。
二自由度陀螺进动与三自由度陀螺进动的区别:①三自由度陀螺在常值外力矩作用下是等速度进动;二自由度陀螺在常值牵连角速度作用下是加速进动。
②三自由度陀螺在外力矩消失后立即停止运动;二自由度陀螺在牵连角速度消失后维持等角速度进动。
二自由度陀螺没有稳定性:二自由度陀螺只有两个自由度,当它受到绕内框轴的冲量矩作用时,不能像三自由度陀螺那样绕外框旋转(没有外框轴),因而不能借助于陀螺力矩,使陀螺绕内、外框轴的转动互相影响,形成章动,保持转子轴大方向。
当基座绕y轴转动时,由于陀螺力矩使陀螺绕内环轴进动,转子轴方位就要改变,不能保持原来的方位。
2.速度陀螺的基本原理速度陀螺仪:利用二自由度陀螺测量飞机(或其他航行器)角速度的仪表,称为二自由度速度陀螺仪,常简称速度陀螺仪。
它是飞机上的重要仪表之一。
1、组成及作用速度陀螺仪由二自由度陀螺、平衡弹簧和阻尼器等部分组成。
二自由度陀螺的Y 轴与内框轴和自转轴均垂直,是速度陀螺仪的输入轴,仪表可以测出绕该轴的角速度。
二自由度陀螺:当飞机转弯时,产生陀螺力矩。
航空仪表知识总结

航空仪表知识总结(一)航空仪表的分类:飞行仪表、发动机仪表、辅助系统仪表(二)飞行高度的种类:1.绝对高度:飞机从空中到海面的垂直距离。
2.相对高度:飞机从空中到某一机场的地面的垂直距离。
3.真实高度:飞机从空中到正下方的地面目标的垂直距离。
4.标准气压高度:飞机从空中到标准气压海平面的垂直距离。
5.场压高度:同相对高度的概念。
6.海压高度:同绝对高度的概念。
(三)气压式高度表的工作原理:利用标准大气压中气压(静压)与高度的对应关系,测量气压的大小,就可以表示飞行高度的高低。
(四)国际标准大气的参数:气压P=1013 hPa ( 760 mmHg 或29.921 inHg);气温T=15℃,密度ρ=0.125㎏/m³,气体常数为29.27 m/℃,对流层顶界11㎞,气温的递减率为0.0065℃/m ,在低层大气中,压力递减率为 1.0inHg/1000ft,温度递减率为2℃/1000f t。
在平流层内,气温不随高度变化。
(五)高度表的组成:感受部分、传送部分、显示部分、调整部分。
高度表的误差的种类为机械误差和方法误差(气压误差、气温误差)(六)高度表调整部分的作用:1.选择高度基准面,测量不同种类高度。
2.修正气压方法误差。
(七)空速表:指示空速与真空速的关系:在海平面上,指示空速IAS=真空速TAS,高度H上升,如果真空速不变,因为ρ下降,P下降,V下降,则TAS>IAS。
(八)全静压系统的组成:全压管、静压孔、备用静压源、转换开关、加温装置、全静压导管。
防冰加温电阻的作用:防止飞机在飞行期间结冰引起全压管堵塞(九)全静压指示系统注意事项:一.1.飞行前,应该取下全压管和静压孔保护套,同时检查全压管和静压孔是否结冰或被异物堵塞。
2.检查全静压加温装置是否正常或全静压系统的电加温应按规定进行,一般不超过1~2min。
3.全静压转换开关均应放在正常位置。
二.而在空中使用:○1大中型飞机在起飞前接通开关,小型飞机在空中可能结冰时接通开关。
第九章 姿态及航向仪表系统

• 陀螺放在地球上任意纬度处,自转轴与 地平面平行,朝向南北方向,则自转轴 方向逐渐改变,相对地球作园锥轨迹运 动,每24小时转动一周。
• 陀螺自转轴与地球自转轴相互平行或重 合时(不管陀螺在地球上什么地方), 不存在相对运动。
9.1 陀螺基础知识 飞机上的陀螺仪表:地平仪、陀螺半罗盘和转弯侧滑仪。 它们靠气源或电驱动。 大多数轻型飞机上,地平仪和陀螺半罗盘的气源由真空系统提供,转弯仪由电气系统供电 。
• 自转轴、内框轴和外框轴的轴线相交于 一点,这一点称为陀螺的支点。
9.1 陀螺基础知识
• 对自转轴而言,具有绕内框轴和外框轴转动的两个自由度,故有的地 方称为二自由度陀螺。
• 转子具有转动自由度,所以这里统一称之为三自由度陀螺。 • 三自由度陀螺具有两个基本特性:
• 稳定性 (Stability):陀螺保持自转轴方向在惯性空间稳定的特性。 • 进动性(Precession):在外力矩作用下,陀螺自转轴转动方向与外
力矩作用方向不一致,而力图使转动矢量以最短路径向外力矩矢 量靠近。
9.1 陀螺基础知识
• 稳定性的两种表现:定轴性和章动。
• 定轴性:转子高速旋转后,若不受外力矩作用,无论陀螺仪支架(又或者内框/外 框)如何转动,自转轴的指向在惯性空间中保持不变。
• 章动:转子高速旋转后,受到瞬时冲击力矩时,自转轴 将在原空间方向附近做微小振幅的圆锥振荡运动,这种 振荡运动即为章动。
扰的情况下,有限时间内自转轴保持方位稳定的能力。
9.1 陀螺基础知识
陀螺表现运动
(a) 在两极,陀螺自转轴相对地球的运动 (b) 在赤道,陀螺自转轴相对地球的运动
动作捕捉浅析(一)——惯性动作捕捉

动作捕捉浅析(一)——惯性动作捕捉一、理论概述:动作捕捉英文Motion capture,简称Mocap。
技术涉及尺寸测量、物理空间里物体的定位及方位测定等方面可以由计算机直接理解处理的数据。
在运动物体的关键部位设置跟踪器,由Motion capture系统捕捉跟踪器位置,再经过计算机处理后向得到三维空间爱你坐标的数据。
当数据被计算机识别后,可以应用在动画制作,步态分析,生物力学,人机工程等领域。
常用的运动捕捉技术从原理上说可分为惯性、光学式、声学式、电磁式。
不同原理的设备各有其优缺点,一般可从以下几个方面进行评价:定位精度;实时性;使用方便程度;可捕捉运动范围大小;抗干扰性;多目标捕捉能力;以及与相应领域专业分析软件连接程度。
惯性式:主要工作原理是跟在人的身上主要的关键点绑定惯性陀螺仪,分析陀螺仪的位移变差来判定人的动作幅度和距离;光学式:光学式运动捕捉通过对目标上特定光点的监视和跟踪来完成运动捕捉的任务。
目前常见的光学式运动捕捉大多基于计算机视觉原理。
从理论上说,对于空间中的一个点,只要它能同时为两部相机所见,则根据同一时刻两部相机所拍摄的图像和相机参数,可以确定这一时刻该点在空间中的位置。
当相机以足够高的速率连续拍摄时,从图像序列中就可以得到该点的运动轨迹;声学式:常用的声学式运动捕捉装置由发送器、接收器和处理单元组成。
发送器是一个固定的超声波发生器,接收器一般由呈三角形排列的三个超声探头组成。
通过测量声波从发送器到接收器的时间或者相位差,系统可以计算并确定接收器的位置和方向。
Logitech、SAC等公司都生产超声波运动捕捉设备;电磁式:电磁式运动捕捉系统是目前比较常用的运动捕捉设备。
一般由发射源、接收传感器和数据处理单元组成。
发射源在空间产生按一定时空规律分布的电磁场;接收传感器(通常有10~20个)安置在表演者身体的关键位置,随着表演者的动作在电磁场中运动,通过电缆或无线方式与数据处理单元相连。
第十四次课 陀螺仪表解读

单自由度陀螺的进动性
自转角速度矢量向右,使 基座反时针转动,那么外 力矩方向向上,根据陀螺 进动规律,自转角速度矢 量,将沿最短途径转向外 力矩矢量的方向,也就是 陀螺绕内框轴转动,即自 转角速度矢量向上进动, 进动角速度矢量沿内框轴 向外。转弯仪正是利用单 自由度陀螺的进动特点工 作的。
第7节
陀螺仪表
飞机的姿态仪表和航向仪表,如地平仪、航向 陀螺、惯性导航系统等,大多是利用陀螺特性 工作的。
Page 1
7·1
1·陀螺的定义和分类
陀螺基本知识
能高速旋转并且旋转轴能在空间改变方向的物体,叫做陀螺 。 陀螺的种类很多,目前飞机上应用最多的是刚体转子陀螺和 激光陀螺。
自转轴具有两个自由度的陀螺,叫两自由度陀螺。
自转轴具有一个自由度的陀螺,叫单自由度陀螺。 有的书上根据转子具有的自由度分类,则把上面所说的两自 由度陀螺和单自由度陀螺分别称为三自由度陀螺和两自由度 陀螺。
Page 2
Page 3
单
Page 4
2·两自由度陀螺的特性
两自由度陀螺具有两个基本特性:进动性和稳定性。 ⑴ 进动性:两自由度陀螺受外力矩作用时,它的转动方向与外 力矩方向相互垂直的特性,称为两自由度陀螺的进动性。 进动方向:角动量矢量沿最短途径转向外力矩矢量的方向。 右手螺旋法则:将右手大母指伸直,其余四指以最短路线从角 动矢量方向握向外力矩矢量的方向,则大拇指的方向就是进动 角速度矢量的方向。
Page 15
Page 16
进动特点比较
两自由度陀螺等速进动;两自由度陀螺在外 力矩消失后,立即停止进动。 单自由度陀螺加速进动;单自由度陀螺在基 座旋转停止后,等速进动。
陀螺仪原理1基本特性
进动角速度大小与外力矩的大小成正比,与转子的动量矩的大小成反比。
进动的“无惯性”
陀螺动力效应:陀螺力矩
外加力矩
M H
陀螺力矩:反作用力矩
M g H H
陀螺力矩的方向判断 陀螺力矩的作用对象
陀螺动力(稳定)效应,对外框架有效
陀螺动力(稳定)效应,对内框架无效
定轴性总结;漂移、章动
4.3.3陀螺的基本特性
4.3.3陀螺的基本特性
4.3.3陀螺的基本特性
4.3.3陀螺的基本特性
进动角速度的方向和大小
进动角速度的方向:最短路径法则 (H 沿着最短路径趋向 M)
进动角速度的大小:根据 M = ω×H,写成标量形式:
M = ω·H·sinθ
因此 ω = M /(H·sinθ)
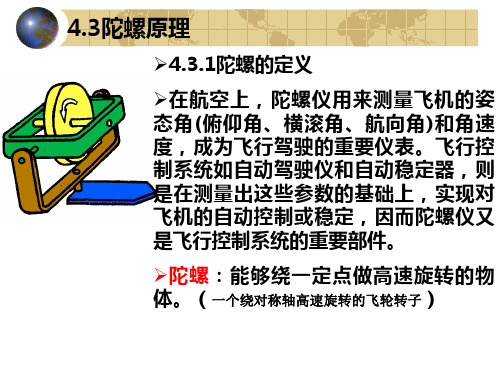
4.3陀螺原理
4.3.1陀螺的定义
例如:“地转子”当它不转动时和普通物体一样;当 它高速旋转起来以后,就有一个明显的特征:地转子能 稳定地直立在地面不会倒下。这说明高速旋转的物体具 有保持其自转轴方向不变的性质。根据这种性质所研制 出的一种能感测旋转的装置,叫陀螺仪。
4.3陀螺原理
因为陀螺仪可以感测物体相对于空间的旋转,所以, 可以利用它来测量角位移或角速度。利用这种原理研 制出了各种陀螺仪表,并在航空中得到了广泛的应用。 陀螺仪:将陀螺安装在框架装置上,使陀螺的自转轴 有一定的转动自由度,这种装置的总体。 陀螺的基本部件(航空仪表中的陀螺) 陀螺转子、内、外框架(支承部件) 附件(电机、力矩器、传感器等) 转子是一个对称的飞轮,可以高速旋转,其旋转轴为 自转轴,旋转角速度为自转角速度。
二自由度陀螺仪的定轴性
二自由度陀螺仪具有抵抗干扰力矩, 力图保持其自转轴相对惯性空间方 位不变的特性(定轴性、或稳定 性)。
王世锦《飞机仪表》第五章 陀螺和姿态系统仪表
航地平仪
1. 转轴在地垂线方向时,气泡在中央,铁芯在中 央,不产生修正力矩。 2. 自转轴偏离地垂线时,气泡偏移,铁芯偏移, 产生修正力矩。
航空地平仪
(二)固体摆式地垂 修正器 结构:配重、非 稳定摆修正器、活 动臂等。 修正速度3°/分, 垂直精度0.5°。
自转轴在地垂线方向时,合重心通过 自转轴,无修正力矩。
航空地平仪
工作原理: 利用摆的地垂性修正陀螺,利用陀螺 的稳定性建立稳定的人工地垂线,从而根 据飞机和陀螺的关系测量姿态角。
航空地平仪
安装和测量方法: 纵向安装——外框轴平行于飞机纵轴 横向安装——外框轴平行于飞机横轴
航空地平仪
纵向安装—俯仰角
航空地平仪
纵向安装—倾斜角
航空地平仪
组成:三自由度陀螺、地垂修正器、指示 机构、控制机构。
组成: 二自由度陀螺,平衡弹簧、空气阻尼器和指示机构
1. 自转轴和飞机 横轴平行; 2. 自转角速度矢 量指向左机翼; 3. 内框轴与飞机 纵轴平行; 4. 测量轴与飞机 立轴平行
转弯仪
指示转弯方向: 飞机转弯时,产生一个与飞机转弯角 速度成比例的陀螺力矩,使陀螺绕内框轴 进动,通过传动机构带动指针指示转弯方 向和转弯角速度。
频率高、振幅小,自 转轴改变很小; 轴承摩擦和空气阻尼, 章动很快衰减。
稳定性
影响稳定性的因素:
转子的自转角速度 Ω 转子相对自转轴的转动 惯量 J 转子角动量 H=Ω〃J 干扰力矩 自转轴和外框轴夹角
稳定性
Ω越大, J 越大,干 扰力矩越小,稳定性越 高。 自转轴和外框轴垂直 时,稳定度最高。
转弯仪
指示飞机无侧滑转弯时的倾斜角: tanγ=Fi/G 而 Fi=mvω G=mg
陀螺仪的进动性
陀螺是一个既能绕自转轴高速旋转,又能够绕其它轴旋转的物体。
利用陀螺的特性制作的测量装置就是陀螺仪。
能够绕2个轴旋转的陀螺称为二自由度陀螺,能够绕3个轴旋转的陀螺称为三自由度陀螺。
利用陀螺的特性制作的测量仪器(或装置)就称为陀螺仪。
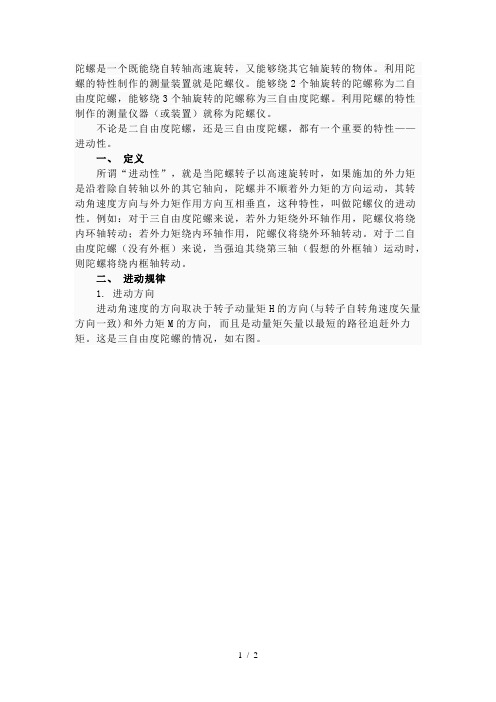
不论是二自由度陀螺,还是三自由度陀螺,都有一个重要的特性——进动性。
一、定义所谓“进动性”,就是当陀螺转子以高速旋转时,如果施加的外力矩是沿着除自转轴以外的其它轴向,陀螺并不顺着外力矩的方向运动,其转动角速度方向与外力矩作用方向互相垂直,这种特性,叫做陀螺仪的进动性。
例如:对于三自由度陀螺来说,若外力矩绕外环轴作用,陀螺仪将绕内环轴转动;若外力矩绕内环轴作用,陀螺仪将绕外环轴转动。
对于二自由度陀螺(没有外框)来说,当强迫其绕第三轴(假想的外框轴)运动时,则陀螺将绕内框轴转动。
二、进动规律1. 进动方向进动角速度的方向取决于转子动量矩H的方向(与转子自转角速度矢量方向一致)和外力矩M的方向, 而且是动量矩矢量以最短的路径追赶外力矩。
这是三自由度陀螺的情况,如右图。
这可用右手定则判定。
即伸直右手,大拇指与食指垂直,手指顺着自转轴的方向,手掌朝外力矩的正方向,然后手掌与4指弯曲握拳,则大拇指的方向就是进动角速度的方向。
对于二自由度陀螺来说,进动角速度的方向也可用右手定则判定。
即伸直右手,大拇指与食指垂直,手指顺着自转轴的方向,手掌朝强迫转动的角速度矢量的正方向,然后手掌与4指弯曲握拳,则大拇指的方向就是进动角速度的方向。
2. 进动角速度对于三自由度陀螺来说,进动角速度的大小取决于转子动量矩H的大小和外力矩M的大小。
其计算式为 =M/H。
即外力矩愈大,其进动角速度也愈大;转子的转动惯量愈大,进动角速度愈小;转子的角速度愈大,进动角速度愈小。
对于二自由度陀螺来说,其进动角速度的大小取决于转子动量矩H的大小和强迫转动角速度的大小。
三、进动性的应用对于三自由度陀螺来说,利用其进动性,可对自转轴的漂移进行修正或跟踪等;对于二自由度陀螺来说,利用其进动性,可测量运动物体的角速度或角加速度。
电子仪表系统2惯性仪表
副翼和方向舵在转弯时是协调的 内侧滑:转弯速度太慢,小球向转弯内侧移动 外侧滑:转弯速度太快,小球向转弯外侧移动
应当向小球滚动方向偏转方向舵使小球保持在中央; 标准转弯率(标准转弯角速度) 3度/秒 转1圈360度需要2分钟 等待航线:2分钟 小球向哪边偏就往哪边踩舵
第十பைடு நூலகம்章 电子仪表系统
(二)陀螺仪表
中国民航大学 空管学院
1
第十三章 电子仪表系统-惯性仪表
一、陀螺原理
陀螺:是绕一支点高速旋转的物体。
2
第十三章 电子仪表系统-惯性仪表 陀螺主要有两个基本特性:稳定性和进动性。
1.定轴性
当三自由度陀螺转子高速旋转后, 若不受外力矩的作用,不管基座如何 转动,支撑在万向支架上的陀螺仪自 转轴指向惯性空间的方位不变,这种 特性叫“定轴性”。
3
第十三章 电子仪表系统-惯性仪表
定轴性
4
第十三章 电子仪表系统-惯性仪表
2.进动性
陀螺仪总是绕着与外力矩矢量相垂直的方向的转动,这一 特性称三自由度陀螺的进动性。
5
第十三章 电子仪表系统-惯性仪表 6
第十三章 电子仪表系统-惯性仪表
①二自由度
②三自由度 7
第十三章 电子仪表系统-惯性仪表
2021/3/10
19
第十三章 电子仪表系统-惯性仪表 20
第十三章 电子仪表系统-惯性仪表
(3)陀螺罗盘
1.磁罗盘:通过感受地磁场来测量飞机的磁航向。
21
第十三章 电子仪表系统-惯性仪表
(3)陀螺罗盘
三自由度陀螺仪在惯性空间具有定轴性,将陀螺自转 轴置于水平位置,并调整到指北方向,并以它作为航向 测量基准,可以指示出飞机的航向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二自由度陀螺仪的转子支撑在一个框架内,没有外框架,因而转子自转有一个进动自由度,即少了垂直于内框架轴和自转轴方向的转动自由度。
因此二自由度陀螺仪与三自由度陀螺仪的特性也有所不同。
进动性是三自由度陀螺仪的基本特征之一,当绕内框轴作用外力矩时,将使高速旋转的转子自转轴产生绕外框架轴的进动,而绕外框架轴作用外力矩是,将使转子轴产生绕内框架轴的进动。
定轴性是三自由度陀螺仪的另一基本特征。
无论基座绕陀螺仪自转轴转动,还是绕内框架轴或外框架轴方向转动,都不会直接带动陀螺转子一起转动(指转子自转之外的转动)。
由内、外框架所组成的框架装置,将基座的转动与陀螺转子隔离开来。
这样,如果陀螺仪自转轴稳定在惯性空间的某个方位上,当基座转动时,它仍然稳定在原来的方位上。
对于二自由度陀螺仪,当基座绕陀螺仪自转轴或内框架轴方向转动时,仍然不会带动转子一起转动,即内框架仍然起隔离运动的作用。
但是,当基座绕陀螺仪缺少自由度的X轴方向以角速度ωX转动时,由于陀螺仪绕该轴没有转动自由度,所以基座转动时,就通过内框架轴上的一对支承带动陀螺转子一起转动。
但陀螺仪自转轴仍尽力保持其原来的空间方位不变。
因此,基座转动时,内框架轴上的一对支承就有推力F作用在内框架轴的两端,而形成作用在陀螺仪上的推力矩mx,其方向垂直于动量矩H,并沿X轴正向。
由于陀螺仪绕内框架轴有转动的自由度,所以这个推力矩就使陀螺仪产生绕内框架轴的进动,进动角速度β指向内框架轴y的正向,使转子轴趋向与x轴重合。
因此,当基座绕陀螺仪缺少自由度的方向转动时,将强迫陀螺仪跟随基座转动,同时陀螺仪转子轴绕内框架轴进动。
结果使转子轴趋向与基座转动角速度的方向重合。
即二自由度陀螺仪具有敏感绕其缺少转动自由度方向旋转角速度的特性。
二自由度陀螺仪受到沿内框架轴向外力矩作用时,转子轴绕内框轴运动。
沿内框架轴向作用力矩时转子轴的运动。
设沿内框架轴y的正向有外力矩My作用,则二自由度陀螺仪的转子轴将力图以角速度My/H绕x轴的负向进动,由于陀螺转子轴绕x轴方向不能转动,这个进动是不可能实现的。
但其进动趋势仍然存在,并对内框架轴两端的支承施加压力,这样,支承就产生约束反力F作用在内框架轴两端,而形成作用在陀螺仪上的约束反力矩mx,其方向垂直于动量矩H并沿x轴的正向。
由于转子轴绕内框架轴存在转动自由度,所以在这个约束反力矩mx的作用下,陀螺仪转子轴就绕内框架轴以β德角速度沿y轴正向进动。
简单地说,如果陀螺绕x轴方向不能转动,那么在绕内框架轴向德外力矩作用下,陀螺仪的转子轴也绕内框架轴转动。