线特征的提取与定位算法
测绘技术中图像配准和变换的原理与实践指南
测绘技术中图像配准和变换的原理与实践指南近年来,随着遥感和测绘技术的迅猛发展,图像配准和变换成为测绘工作的重要环节。
图像配准是通过对不同源的图像进行空间定位和相对准确的匹配,使得它们在地理坐标上具有一致性。
而图像变换则是利用数学方法将图像从一种坐标系统转换到另一种坐标系统,达到矫正和精确定位的目的。
本文将介绍图像配准和变换的原理与实践指南。
一、图像配准原理图像配准的主要原理是通过对两幅或多幅图像进行特征匹配,找到它们之间的对应关系,进而确定它们的空间位置和姿态。
常用的特征匹配方法包括兴趣点匹配、线特征匹配和区域特征匹配等。
1. 兴趣点匹配兴趣点匹配是一种基于特征点的图像配准方法,通过在图像中提取出具有显著特征的兴趣点,并对这些点进行匹配,从而得到图像之间的对应关系。
兴趣点可以是角点、边缘点或斑点等。
在匹配过程中,常用的算法有SIFT、SURF和FAST等。
2. 线特征匹配线特征匹配是一种基于线特征的图像配准方法,在图像中提取出具有一定长度并且有明显方向的线段,并通过线段的形状、方向和长度等信息进行匹配。
常用的线特征提取算法有Hough变换、LSD和特征线索引等。
3. 区域特征匹配区域特征匹配是一种基于图像区域的图像配准方法,通过对图像区域进行特征提取,并计算区域之间的相似性,从而实现图像的配准。
常用的区域特征包括颜色直方图、纹理特征和形状特征等。
二、图像变换原理图像变换是指将一幅图像从一个坐标系统转换到另一个坐标系统的过程。
常见的图像变换包括几何变换和光学变换两类。
1. 几何变换几何变换是通过对图像的像素进行坐标变换,实现图像的平移、缩放、旋转和仿射等操作。
平移是将图像在水平和垂直方向上移动一定距离;缩放是按照一定比例改变图像的尺寸;旋转是将图像按照一定角度进行旋转;仿射变换是保持直线和平行线性质的变换。
常用的几何变换方法有双线性插值、最近邻插值和三次样条插值等。
2. 光学变换光学变换是指通过光线传输的过程对图像进行变换。
lsd线特征提取算法
lsd线特征提取算法标题:理解与应用LSD(Linear Segment Detector)线特征提取算法一、引言LSD (Linear Segment Detector) 算法,是一种高效的直线检测和描述方法,由Gioi, T.等人在2010年提出。
该算法主要用于图像处理领域,尤其擅长于复杂背景下精确、完整地检测出图像中的线性结构,具有抗噪声能力强、不受尺度影响以及对图像旋转和仿射变换稳健等优点。
二、LSD算法原理LSD算法基于边缘检测、梯度直方图统计以及拟合优化等技术实现。
其主要步骤如下:1. **边缘检测**:首先通过计算图像的一阶和二阶导数得到图像的梯度信息,以此为基础寻找潜在的线段起始点。
2. **梯度累积**:在每个可能的起始点周围构建梯度直方图,并通过累积梯度强度和方向信息来定位线段的端点。
3. **线段细化与拟合**:采用贪心策略逐步扩展线段,同时通过最小化误差平方和的方式拟合最优线段参数,确保检测出的线段尽可能贴近实际线性结构。
4. **多尺度处理**:算法通过多尺度分析,能够在不同尺度下稳定地检测出线段,从而能够处理各种尺度的线性特征。
5. **非极大值抑制**:为了避免同一线性结构被重复检测,算法最后采用了非极大值抑制方法去除冗余的线段检测结果。
三、LSD算法优势相比于传统的霍夫变换和其他直线检测方法,LSD算法有以下显著优势:- 高效性:算法设计考虑了实时性和效率,适合大规模图像数据的处理。
- 精度高:能有效提取图像中宽度极小或存在大量噪声的线性特征。
- 多尺度性:能够适应图像中线性结构的各种尺度变化。
- 旋转不变性:对于图像的旋转操作具有良好的鲁棒性。
四、应用领域LSD算法广泛应用于各种需要进行线性特征提取的场景,例如自动驾驶中的道路标志识别、遥感图像的道路网络提取、建筑图纸的线条识别、工业视觉中的零部件边缘检测等。
总结,LSD线特征提取算法凭借其高效精准的特点,在图像处理和计算机视觉领域扮演着重要角色,是现代图像分析与理解工具箱中的一个重要组成部分。
无人机图像处理中的特征提取与目标识别
无人机图像处理中的特征提取与目标识别无人机技术作为当今社会中的重要应用领域之一,正在发展迅速。
在无人机的图像处理中,特征提取与目标识别是至关重要的一步。
本文将探讨无人机图像处理中的特征提取和目标识别的相关技术和方法。
一、特征提取在无人机图像处理中,特征提取是将原始图像中的有用信息提取出来,以便后续的目标识别和跟踪。
特征提取的目标是找到能够最好地表示图像内容的特征,包括颜色、纹理、形状和边界等信息。
1. 颜色特征提取颜色是图像中最直观且易于理解的特征之一。
在无人机图像处理中,通过对颜色的提取和分析,可以识别物体的类别和性质。
常用的颜色特征提取方法包括颜色直方图、颜色矩和颜色共生矩阵等。
2. 纹理特征提取纹理是图像中描述物体表面细节的特征。
在无人机图像处理中,纹理特征提取可以用于识别不同材质的物体。
常用的纹理特征提取方法包括局部二值模式(LBP)、灰度共生矩阵(GLCM)和小波变换等。
3. 形状特征提取形状是物体在图像中的外部轮廓和内部结构等几何特征。
在无人机图像处理中,形状特征提取可以用于识别不同形状的目标。
常用的形状特征提取方法包括边缘检测、轮廓描述和形状匹配等。
4. 边界特征提取边界是物体与背景之间的分界线,包括物体的边缘和轮廓等信息。
在无人机图像处理中,边界特征提取可以用于目标的定位和分割。
常用的边界特征提取方法包括Canny算子、Sobel算子和Prewitt算子等。
二、目标识别在无人机图像处理中,目标识别是将提取的特征与预先训练好的模型进行匹配,从而确定图像中的物体类别和位置。
目标识别的目标是提高识别的准确性和速度,以满足实时应用的需求。
1. 机器学习方法机器学习方法是目标识别中常用的方法之一。
通过训练样本和算法模型,可以对图像中的目标进行准确的分类和识别。
常用的机器学习方法包括支持向量机(SVM)、卷积神经网络(CNN)和随机森林等。
2. 深度学习方法深度学习方法是目标识别中近年来快速发展的方法之一。
激光SLAM自主导航的线段特征提取混合算法研究

264机械设计与制造Machinery Design&Manufacture第5期2021年5月激光SLAM自主导航的线段特征提取混合算法研究桑迪,周军,皇攀凌,李蕾(1.山东大学机械工程学院,山东济南250061;2.山东大学高效洁净机械制造教育部重点实验室,山东济南250061;3•齐鲁工业大学(山东省科学院),机械与汽车工程学院,山东济南250353)摘要:移动机器人在未知环境中自主导航时定位需要精确的地图,同时为了构建精确的地图必须确定机器人的位姿,同时定位与地图构建(SLAM)问题便产生。
基于激光雷达SLAM自主导航算法是研究的方向之一,激光雷达具有测距精度高、测距远等优点,但是由于激光雷达的数据量少、传感器本身噪声的影响,容易导致机器人构建地图精度低、定位误差大等问题。
针对激光雷达的数据测得的距离信息进行线段特征提取算法,通过将常用PDBS、IEPF算法优缺点进行综合,提出了一种混合特征提取算法。
最后通过对SICK的LMS111-10100激光雷达获取环境中的一组数据进行处理,分别对PDBS、IEPF算法及混合算法提取效果与实际环境对比,验证了特征提取混合算法的有效性。
关键词:移动机器人;SLAM;激光雷达;PDBS、IPEF算法;线段特征提取中图分类号:TH16;TP242.2文献标识码:A文章编号:1001-3997(2021)05-0264-05Line Segment Feature Extraction Algorithm for Laser SLAM Autonomous NavigationSANG Di,ZHOU Jun,HUANG Pan-ling,LI Lei(1.School of Mechanical Engineering,Shandong University,Shandong Ji'nan250061,China;2.Key Laboratory of High Efficiency and Clean Mechanical Manufacture,Shandong University,Ministry of Education,Shandong Ji'nan250061,China;3.School of Mechanical and Automotive Engineering,Qilu University of Technology(Shandong Academy of Sciences),Shandong Ji'nan250353,China)Abstract:With the development of key technologies such as mapping,positioning and navigation of mobile robots,mobile robots have been”idely usedfor autonomous navigation in various complex indoor and workshop environments.In autonomous navigation,robot localization in unfamiliar environments requires accurate maps.In order to build accurate maps,it is necessary to know the position and pose of the robot,that is,simultaneous localization and mapping(SLAM).SLAM navigation algorithm based on radar is one of the research directions.Radar has the advantages of high ranging accuracy and long distance.However,due to the less data of radar and the influence of sensor noise,the robot makes mistakes in the process of mapping and positioning.This paper improves the line segment feature extraction algorithm for the range information measured by radar data,and synthesizes the advantages and disadvantages qfthe commonly used PDBS and IEPF algorithms,and proposes a hybrid feature extraction algorithm.A set of data in real environment is acquired and processed through the data of LMS111-10100sensor of SICK.The effectiveness of PDBS,IEPF and hybrid algorithm is verified by comparing with the actual environment.Key Words:Mobile Robot;SLAM;Radar;PDBS;IPEF Algorithm;Line Segment Feature Extraction1引言自主导航作为一种新的导航技术已经广泛应用于移动机器人行业,移动机器人通过所携带的激光、视觉、里程计等传感器,在移动过程中完成构建地图与定位。
自动抓取曲线峰值点-概述说明以及解释
自动抓取曲线峰值点-概述说明以及解释1.引言1.1 概述概述部分的内容可以按照以下方式编写:概述曲线分析在很多领域都具有重要的应用价值,其中曲线峰值点是曲线分析中最基本、常见和重要的特征之一。
曲线峰值点是指曲线图中局部最高点所对应的数据点,它们通常代表了曲线的极值或最显著的数据特征。
自动抓取曲线峰值点是一项有挑战性的任务,因为曲线的形状和特征可能会受到噪声、数据采样间隔等因素的影响。
在过去的研究中,许多学者和工程师已经提出了各种方法和算法来实现自动抓取曲线峰值点的任务。
这些方法和算法主要分为两大类:基于阈值的方法和基于特征的方法。
基于阈值的方法通过设定一个阈值来判断曲线上的数据点是否为峰值点,而基于特征的方法则是通过检测曲线上的特定特征来确定峰值点的位置。
本文将主要介绍自动抓取曲线峰值点的方法和算法,包括基于阈值的方法和基于特征的方法。
我们将详细介绍这些方法和算法的原理、步骤和应用场景,并进行实验验证和结果分析。
通过本文的研究,我们希望能够为自动抓取曲线峰值点提供一种高效、准确和可靠的解决方案,以满足不同领域对曲线分析和数据挖掘的需求。
文章结构本文将按照以下结构进行组织和撰写:引言部分将对曲线峰值点的定义和重要性进行介绍,以及本文的目的和意义。
正文部分将详细介绍自动抓取曲线峰值点的方法和算法。
首先,我们将介绍基于阈值的方法,包括阈值的确定和峰值点的判定。
然后,我们将介绍基于特征的方法,包括曲线特征的提取和峰值点的定位。
对于每种方法,我们将介绍其原理、步骤和实现方式,并比较它们的优缺点。
结论部分将对实验结果和分析进行总结,并对自动抓取曲线峰值点的应用前景进行展望。
我们将讨论不同领域中对曲线峰值点的需求和应用场景,并提出未来研究的方向和挑战。
通过本文的阅读,读者将获得关于自动抓取曲线峰值点的全面了解,包括方法、算法、实验结果和应用前景。
无论是从理论研究的角度还是从实际应用的角度,本文都将为读者提供有价值的参考和指导。
顾及轨迹趋势变化的特征提取算法
顾及轨迹趋势变化的特征提取算法随着计算机技术的不断发展,人们能够收集到越来越大量复杂的轨迹数据。
这些数据源可以是GPS跟踪、社交媒体的检查,或者从传感器进行采集等。
这些轨迹数据的分析和处理是一个极其重要的研究领域,不仅可以用于地理定位,还可以用于计算投资、城市规划、运输系统等多个领域。
其中,特征提取算法是处理轨迹数据的重要部分,在处理轨迹数据前,需要先对轨迹数据进行特征提取和选择。
目的是在轨迹数据中提取最优的特征,提高模型的精度和预测能力。
在本文中,我们将介绍一种基于轨迹趋势变化的特征提取算法。
该算法是为了提取轨迹数据的变化规律,依据轨迹的运动方向、速度大小、航向角等指标,结合机器学习算法对轨迹进行分析和处理。
本算法具有以下三个主要特征:1. 考虑特征的时序性在本算法中,我们考虑了轨迹中数据的时序性,让特征随着时间的推移而发生变化。
本算法选取了三个主要的轨迹特征:航向角、速度和加速度。
我们分别计算出每个特征在每个时刻的变化情况,形成一个多维向量。
当然,对于这些特征,如果需要更深入地挖掘和处理,也可以运用一些各式各样的处理技术。
例如,在考虑速度大小时,我们可以考虑位置的改变速率,并在此基础上计算出速度的高斯分布。
在考虑加速度时,我们还可以将两个连续时刻的速度差来表示加速度。
2. 基于轨迹的趋势变化进行特征提取轨迹数据的趋势变化是影响轨迹数据分析的一个非常重要的因素。
在许多情况下,轨迹的变化趋势可以帮助我们推断车辆所处的道路、行驶方向等信息。
例如,若同一辆车经过两个地方,相邻时刻的行驶方向变化相对较小,可能就说明该车辆在驶往相同的路线。
因此,本文中该特征提取算法将会结合轨迹的趋势变化进行特征提取,以提高特征的准确性。
本算法首先计算出轨迹的曲率变化趋势。
曲率是指某一段轨迹的弯曲程度。
当曲率变化趋势呈现负斜率时,轨迹将会直线化(即变得更加平直),并且当曲率变化趋势呈现正斜率时,轨迹将会弯曲得更加剧烈。
因此,在计算了轨迹的曲率变化趋势后,我们可以将其作为一项重要的特征。
线特征的提取与定位算法

线特征的提取与定位算法
山东交通学院
测绘教研室
主要内容
特征的提取 • 特征点的提取算法 • 特征线的检测方法 特征的定位算法
线特征提取算子
线特征是指影像的“边缘”与“线”
“边缘”可定义为影像局部区域特 征不相同的那些区域间的分界线, 而“线”则可以认为是具有很小宽 度的其中间区域具有相同的影像特 征的边缘对
Hough变换算法实现 a
由于垂直直线a,为无穷大, 我们改用极坐标形式:xcos + ysin = 参数平面为, ,对应不是 直线而是正弦曲线; 使用交点累加器,或交点 统计直方图,找出相交线 段最多的参数空间的点; 然后找出该点对应的xy平 面的直线线段。
A
b
对于影像空间直线上任一点(x,y) 变换将其映射到参数空间(,)的 一条正弦曲线上
p+q阶原点矩与中心y)
Trinder 改进算子
算子受二值化影响,误差可达0.5像素。
1 x M 1 y M
M
n 1 m 1 i 0 j 0
ig
i 0 j 0
n 1
m 1
ij
Wij
i 0 j 0
ij
n 1
首先用高斯函数先进行低通滤波,然后利用 拉普拉斯算子进行高通滤波并提取零交叉点
x y f ( x, y ) exp( ) 2 2
2 2
高斯函数
低通滤波
G( x, y) f ( x, y) g ( x, y)
G( x, y) [ f ( x, y) * g ( x, y)]
2 g 2g x
2
2g y 2
2 g ij ( g i 1, j g i , j ) ( g i , j g i 1, j ) ( g i , j 1 g i , j ) ( g i , j g i , j 1 ) g i 1, j g i 1, j g i , j 1 g i , j 1 4 g i , j
图像中直线的提取方法
图像中直线提取以及方法研究第一节引言在对图像的研究和应用中,人们往往仅对图像中的某些部分感兴趣,这些部分常称为目标或前景(其它部分称为背景),它们一般对应图像中特定的具有独特性质的区域。
为了辨识和分析目标,需要将这些有关区域分离出来,在此基础上才有可能对目标进一步处理,如进行特征提取和测量。
随着数字信号处理技术和计算机技术的发展,机器视觉正得到广泛而深入的研究。
如何正确、快速地识别目标的特征信息,已成为机器视觉领域的研究热点。
直线是图像中物体的基本特征之一,一些人造目标如房屋、道路、桥梁具有明显的直线特征,而一般物体平面图像的轮廓也可以表示为直线及弧线的组合,进而对物体轮廓也可以表示为直线及弧线的组合,进而对物体轮廓的检测可以转化为对这些基本元素的识别和提取。
因此,研究图像中直线的检测算法对图像处理和模式识别具有重要意义。
本文就图像中直线提取方法为核心主要介绍了图像分割技术、边缘检测以及直线提取的几种常用算法。
第二节图像分割技术图像分割(image segmentation)就是按照一定的原则将一幅图像或景物分为若干个特定的、具有独特性质的部分或子集,并提取出感兴趣的目标的技术和过程。
在对各种图像的研究应用中,人们往往仅对图像中的某些部分感兴趣,这些部分常称为目标或前景(其它部分称为背景),它们往往一般对应图像中某些特定的、具有独特性质的区域。
这里的独特性质可以是像素的灰度值、物体的轮廓曲线、颜色、纹理等,也可以是空间频谱或直方图特征等。
在图像中用来表示某一物体的区域,其特征都是相近或相同的,但是不同物体的区域之间,特征就会急剧变化。
目标可以对应单过区域,也可以对应多个区域。
为了辨识和分析目标,需要将它们分离提取出来,在此基础上才有可能进一步进行图像识别与理解。
图像分割的目的是把图像空间分成一些有意义的区域,例如,一幅航空照片,可以分割成工业区、住宅区、湖泊、森林等;可以以逐个像素为基础去研究图像分割,也可以利用在规定领域中的某些图像信息去分割。
起重机轨道测量激光光斑中心识别与定位算法
0 引言轨道是起重机安全运行的重要部件,为避免发生因啃轨、轨道沉降变形等问题造成的起重机脱轨事故,需定期对轨道进行检测,GB/T 10183—2016《桥式和门式起重机制造及轨道安装公差》[1]中规定起重机轨道检测参数主要为单轨直线度、双轨同截面内跨距和高度差。
传统的起重机轨道测量存在精度低、劳动强度高及安全性较差等缺点,20世纪90年代后,随着计算机技术快速发展及全站仪等高精度测量仪器设备的应用,国内外有很多研究者及检验机构对轨道自动检测进行了研究,开发出相应测量方案和仪器装置,有力推动了轨道测量技术发展[2-7]。
目前,起重机轨道测量方法主要有激光准直测量法和全站仪测量法2种[8]。
对于激光准值测量法,测量小车光屏的激光光斑中心提取效果直接影响轨道测量精度,传统的激光光斑中心提取包括预处理、图像分割(二值化)、边缘检测及光斑中心计算等步骤。
预处理主要是图像的去噪;阈值分割二值化是关键环节,阈值的选取直接关系到光斑中心计算的准确性;边缘检测难点在于如何去除原始图像中的干扰因素,准确检测起重机轨道测量激光光斑中心识别与定位算法*许海翔 任立新 吴峰崎 刘 华上海市特种设备监督检验技术研究院 上海 200062摘 要:在轨道测量装置中,激光光斑中心检测算法的精度和速度直接影响轨道测量效果,传统的中心算法如灰度质心法、Hough变换等在检测精度或速度上存在不足。
文中提出了一种基于高斯积分曲线拟合的光斑中心定位算法,在光斑降噪、特征增强的图像预处理基础上,插值拟合光斑灰度曲面,进行边缘计算、追踪及细化,得到光斑的像素级边缘点,计算其法向等距线及高斯积分拟合点,并通过贝塞尔曲面拟合其对应灰度值,再采用高斯积分曲线拟合得到亚像素级边缘点,对亚像素边缘点进行圆拟合方法最终确定光斑中心点。
与灰度质心法、Hough变换椭圆中心法相比,此算法的拟合精度较高,抗干扰性好,达到了实验室环境下轨道测量的精度要求。
关键词:起重机;轨道测量;图像边缘追踪;光斑中心识别与定位;算法中图分类号:TH215 文献标识码:B 文章编号:1001-0785(2023)24-0013-08Abstract: In the track measuring device, the accuracy and speed of laser spot center detection algorithm will directly affect the track measurement value. Traditional center algorithms such as gray centroid method and Hough transform have shortcomings in detection accuracy or speed. In this paper, an algorithm of spot center location based on Gaussian integral curve fitting is proposed. On the basis of image preprocessing of spot noise reduction and feature enhancement, the pixel-level edge points of the spot were obtained by interpolation fitting, edge calculation, tracking and thinning, and their normal equidistant lines and Gaussian integral fitting points were calculated, and their corresponding gray values were fitted by Bessel surface, and then sub-pixel edge points were obtained by Gaussian integral curve fitting, and the circular fitting method was adopted for these sub-pixel edge points final determination of the spot center. Compared with gray centroid method and Hough transform ellipse center method, this algorithm has higher fitting accuracy and better anti-interference, which can meet the accuracy requirements of track measurement in laboratory environment.Keywords:crane; track measurement; image edge tracking; spot center identification and location; algorithm*基金项目:上海市市场监督管理局计划科研项目“起重机轨道偏差检测关键技术研究”(2022-35)、“基于视觉与位姿融合的动态测量系统关键技术研究”(2022-31)、“岸边集装箱起重机载荷谱的统计分布特性研究”(2022-34)资助目标边缘,为光斑中心计算提供准确边缘数据支持。
摄影测量重点知识汇总
一、定向★内定向:简单的说内定向就是根据像片的框标和相应的摄影机检定参数,恢复像片与摄影机的相关位置,即建立像片坐标系。
内定向的目的:是将像片纠正到像片坐标,通常方法是像片的周边有一系列的框标点,通常有4个或8个,它们的像片坐标是事先经过严格校正过的,利用这些点构成一个仿射变换的模型(或多项式),把象素纠正到像片坐标系。
通过这一步基本上消除了像片因扫描、压平等因素导致的变形。
★外定向:恢复像对的外方位元素,包括相对定向和绝对定向。
相对定向:恢复或确定立体像对两个光束在摄影瞬间相对位置关系的过程。
绝对定向:确定立体模型在物方坐标系中所处方位和比例的作业过程。
二、特征提取与定位★特征提取:是从图像中提取图像特征的技术过程,或说是从原始图像中提取区分某类目标图像依据的技术过程。
★特征提取的方法:1、兴趣值的选定兴趣值是判定所检测像元是否为感兴趣的特征的基本依据。
2、阈值的选定阈值是判定所检测像元是否为感兴趣的特征的标准。
一、点特征提取算子点特征提取算子:是指运用某种算法使图像中独立像点更为突出的算子,它又被称为兴趣算子或有利算子,主要用于提取我们感兴趣的点(如角点、圆点等)。
二、线特征提取算子线特征提取算子:是指运用某种算法使图像中的“线”更为突出的算子,通常也称边缘检测算子。
线特征:是指影像的“边缘”与“线”,“边缘”可定义为影像局部区域特征不相同的那些区域间的分界线,而“线”则可以认为是具有很小宽度的、其中间区域具有相同的影像特征的边缘对,也就是距离很小的一对边缘构成一条线。
重要性:线特征存在于目标与背景、目标与目标、区域与区域之间.因此它是图像分割所依赖的重要特征,也是纹理特征的重要信息源和形状特征的基础。
特性:沿边缘走向的灰度变化平缓,而垂直于边缘走向的灰度变化剧烈。
三、面特征提取(影像分割)影像中的物体,除了在边界表现出不连续性之外,在物体区域内部具有某种同一性。
根据这种同一性,把一整幅影像分为若干子区域,每一区域对应于某一物体或物体的某一部分,这就是影像分割。
GPS数据的特征提取与分析

GPS数据的特征提取与分析GPS(全球定位系统)是一种通过卫星定位来确定地球上的位置的技术。
在现代社会中,GPS已广泛应用于交通、物流、导航、军事等众多领域。
但是,随着GPS数据的快速发展,如何从海量的GPS数据中提取有用的信息成为了研究热点之一。
本文将探讨GPS数据的特征提取与分析方法。
一、GPS数据的特征GPS数据包含时间、经度、纬度、高度、速度、方向、精度等信息,这些信息可以反映出行动轨迹、速度变化、信号强度等特征。
下面将详细介绍GPS数据的特征。
1. 行动轨迹GPS数据可以记录下用户的定位信息,从而反映用户的路径轨迹。
路径轨迹通常体现出用户的行动轨迹,如运动员的训练轨迹、车辆的行车轨迹、旅游者的路线轨迹等。
路径轨迹可以为用户提供参考,帮助他们更好地规划出行路线,也可以用于监管、追踪等方面。
2. 速度变化GPS数据中的速度信息,可以反映出用户在不同位置的移动速度,如车辆在高速公路上的行车速度、运动员在不同时间段的运动速度等。
速度变化可以用于评估用户的运动能力,或者评估车辆在行驶过程中的合理性和安全性。
3. 信号强度GPS数据中的信号强度可以反映出用户所处的信号环境,如天气、地形、建筑物等对GPS信号的干扰情况。
这些影响因素,可能会导致GPS信号的丢失或者变弱。
因此,在分析GPS数据时,需要考虑这些因素的影响,以准确反映用户的情况。
二、GPS数据的特征提取方法为了更好地利用GPS数据,需要根据用户的需求,提取出有意义的信息。
下面将简述GPS数据的特征提取方法。
1. 轨迹提取轨迹提取方法通常基于GPS数据中的位置信息,通过位置点的连线来描述用户的路径轨迹。
常见的轨迹提取方法包括:基于距离阈值的轨迹提取法、基于时间阈值的轨迹提取法、基于密度的轨迹提取法等。
2. 速度提取速度提取方法通常基于GPS数据中的速度信息,通过对于速度变化的分析来提取出用户的行车状态。
常见的速度提取方法包括:基于积分的速度提取法、基于加速度的速度提取法、基于滑动窗口的速度提取法等。
《2024年基于视觉的多智能体定位系统与定位算法设计》范文

《基于视觉的多智能体定位系统与定位算法设计》篇一一、引言在复杂的机器人系统应用中,智能体的定位是一个重要的研究方向。
尤其在自动化的工厂生产线、物流仓储系统、智能家居环境中,智能体的定位显得尤为关键。
近年来,基于视觉的定位技术逐渐受到重视,其在多种环境中展示出了较高的准确性和可靠性。
因此,本文旨在研究并设计一种基于视觉的多智能体定位系统与定位算法,以期提升多智能体系统的性能与准确性。
二、多智能体定位系统的架构设计本文提出的基于视觉的多智能体定位系统由以下三部分组成:智能体单元、中央处理单元和视觉感知单元。
1. 智能体单元:是定位系统的主体部分,用于完成特定的工作或任务。
它们可以是无人驾驶小车、巡逻机器人、自动化生产线上移动的工作机械手等。
2. 中央处理单元:负责对来自智能体单元和视觉感知单元的数据进行处理和解析。
它可以执行目标识别、决策控制等功能。
3. 视觉感知单元:负责获取环境中的图像信息,通过图像处理技术提取出有用的信息,如物体的位置、形状等。
三、定位算法设计本文设计的定位算法主要基于视觉信息处理和机器学习技术,包括以下步骤:1. 图像获取:通过安装在智能体上的摄像头或其他视觉传感器获取周围环境的图像信息。
2. 图像预处理:对获取的图像进行预处理,如去噪、增强等,以提高图像的质量和识别度。
3. 特征提取:利用图像处理技术提取出有用的特征信息,如颜色、形状、纹理等。
4. 目标识别与定位:通过机器学习算法对提取的特征信息进行识别和匹配,确定目标的位置和状态。
5. 决策与控制:中央处理单元根据目标的位置和状态信息,结合预设的规则或算法,生成控制指令,控制智能体的运动轨迹和动作。
四、算法实现与优化在算法实现过程中,我们采用了深度学习和模式识别技术,以提高定位的准确性和效率。
同时,我们还对算法进行了优化,包括但不限于以下方面:1. 图像处理算法优化:通过改进图像预处理和特征提取算法,提高图像的识别度和准确性。
一种新的直线特征提取和定位算法
维普资讯
3 第3 卷 第 1 期 2
VL 2
程
20 年 7月 06
J l 0 6 u y2 0
№ l 3
Co p t rEn i e rn m u e g n e ig
特征点提取与匹配算法在SLAM中的应用研究

特征点提取与匹配算法在SLAM中的应用研究随着科技的不断进步和发展,许多领域都引入了机器人和自动化技术。
其中,SLAM(Simultaneous Localization and Mapping)技术在智能交通、无人驾驶、物流和工业等领域具有广泛的应用前景。
SLAM技术是指在未知环境中,通过机器人自动获取环境中的信息并进行自我定位和建图的过程。
其中,特征点提取和匹配算法是实现SLAM技术的重要组成部分。
本文将着重探讨特征点提取和匹配算法在SLAM中的应用研究。
一、特征点提取算法特征点提取算法是指在图像中检测出具有特征性的像素点,如边缘、角点等,并通过这些像素点进行定位和建图。
常用的特征点提取算法包括Harris角点检测算法、SIFT算法和SURF算法等。
1. Harris角点检测算法Harris角点检测算法是一种基于梯度的角点检测算法。
该算法通过计算像素的梯度来识别图像中的角点。
具体来说,如果一个像素的邻域区域的梯度都比较大,那么这个像素就有可能是一个角点。
2. SIFT算法SIFT算法是一种基于尺度空间和梯度方向的特征点检测算法。
该算法通过分别在不同的尺度下检测图像的局部特征,同时使用关键点的梯度方向进行描述,从而实现对图像的匹配。
3. SURF算法SURF算法是一种加速版的SIFT算法,它采用了积分图像的方法,从而大大提高了特征点提取的速度。
该算法通过对图像的尺度空间和滤波后的图像进行处理,提取出具有代表性的特征点。
二、特征点匹配算法特征点匹配算法是指将两张图像中的特征点进行匹配,从而实现对机器人定位和建图的精确度提高。
常用的特征点匹配算法包括KNN算法、RANSAC算法和Hough算法等。
1. KNN算法KNN算法是一种基于邻近点的匹配算法。
该算法通过计算两张图像中每个特征点和另一张图像的最近邻点之间的距离,从而实现特征点的匹配。
2. RANSAC算法RANSAC算法是一种统计学算法,它可以从一组数据中找到对应模型的最佳匹配。
3d相机视觉引导定位计算公式

3d相机视觉引导定位计算公式3D相机视觉引导定位计算公式引言:随着科技的不断发展,3D相机的应用越来越广泛。
3D相机拥有三维坐标信息,可以对物体进行精确的测量和定位。
本文将介绍3D相机视觉引导定位计算公式的原理和应用。
一、3D相机视觉引导定位的原理3D相机通过捕捉目标物体的图像,利用计算机视觉技术,提取图像中的特征点和特征线,进而计算出物体的三维坐标。
3D相机视觉引导定位的原理可以概括为以下几个步骤:1. 图像采集:3D相机通过摄像头采集目标物体的图像。
2. 特征提取:利用图像处理算法,提取图像中的特征点和特征线。
特征点可以是物体的角点、边缘点等,特征线可以是物体的轮廓线、边缘线等。
3. 特征匹配:将采集到的图像特征与模板特征进行匹配,找出匹配度最高的特征点和特征线。
4. 三维坐标计算:根据相机的内参矩阵和外参矩阵,以及特征点和特征线的像素坐标,计算出物体在相机坐标系下的三维坐标。
二、3D相机视觉引导定位的应用3D相机视觉引导定位广泛应用于机器人导航、工业自动化、虚拟现实等领域。
下面以机器人导航为例,介绍其应用。
1. 机器人导航:在机器人导航中,3D相机可以用来定位机器人的位置,并且可以获得机器人周围环境的三维信息。
通过实时采集图像,并计算出机器人在三维空间中的坐标,可以实现机器人的自主导航。
2. 环境建模:3D相机可以通过扫描物体的表面,获取物体的三维模型。
机器人可以利用这些三维模型来识别物体,并实现对物体的抓取、操作等任务。
3. 障碍物检测:利用3D相机可以获得环境中物体的三维坐标,机器人可以通过识别和分析这些物体,进行障碍物检测和避障。
三、3D相机视觉引导定位的优势和挑战3D相机视觉引导定位相比传统的定位方法具有以下优势:1. 高精度:3D相机可以提供物体的精确三维坐标,相比于传统的二维相机定位更加精确。
2. 实时性:3D相机可以实时采集图像,并通过计算得到物体的三维坐标,适用于需要实时定位的场景。
SIFT特征点提取与匹配算法
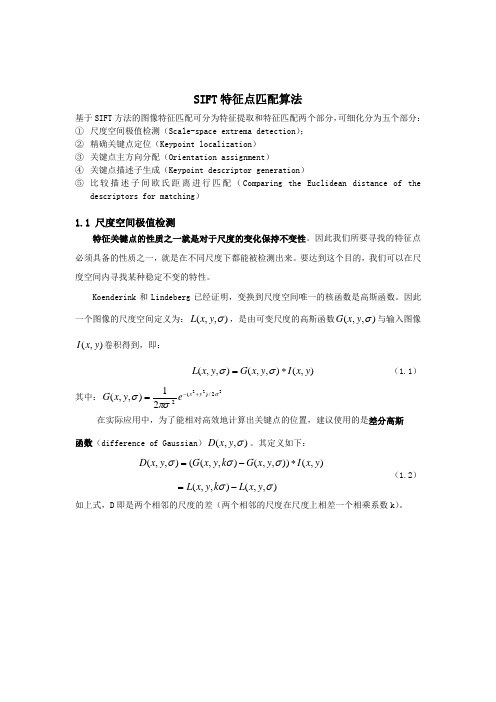
SIFT 特征点匹配算法基于SIFT 方法的图像特征匹配可分为特征提取和特征匹配两个部分,可细化分为五个部分: ① 尺度空间极值检测(Scale-space extrema detection );② 精确关键点定位(Keypoint localization )③ 关键点主方向分配(Orientation assignment )④ 关键点描述子生成(Keypoint descriptor generation )⑤ 比较描述子间欧氏距离进行匹配(Comparing the Euclidean distance of the descriptors for matching )1.1 尺度空间极值检测特征关键点的性质之一就是对于尺度的变化保持不变性。
因此我们所要寻找的特征点必须具备的性质之一,就是在不同尺度下都能被检测出来。
要达到这个目的,我们可以在尺度空间内寻找某种稳定不变的特性。
Koenderink 和Lindeberg 已经证明,变换到尺度空间唯一的核函数是高斯函数。
因此一个图像的尺度空间定义为:(,,)L x y σ,是由可变尺度的高斯函数(,,)G x y σ与输入图像(,)I x y 卷积得到,即:),(),,(),,(y x I y x G y x L *=σσ (1.1) 其中:2222/)(221),,(σπσσy x e y x G +-=在实际应用中,为了能相对高效地计算出关键点的位置,建议使用的是差分高斯函数(difference of Gaussian )(,,)D x y σ。
其定义如下:),,(),,(),()),,(),,((),,(σσσσσy x L k y x L y x I y x G k y x G y x D -=*-= (1.2)如上式,D 即是两个相邻的尺度的差(两个相邻的尺度在尺度上相差一个相乘系数k )。
图 1.1图1.1所展示的是建立DOG 的一种实用的方法。
线特征的提取与定位算法

线特征的提取与定位算法
山东交通学院
测绘教研室
主要内容
特征的提取
• 特征点的提取算法 • 特征线的检测方法
特征的定位算法
线特征提取算子
线特征是指影像的“边缘”与“线”
“边缘”可定义为影像局部区域特 征不相同的那些区域间的分界线, 而“线”则可以认为是具有很小宽 度的其中间区域具有相同的影像特 征的边缘对
,y2)
b
在参数ab平面上相交直线最多的点,对应的xy平面上的 直线就是我们的解
Hough变换算法实现
由于垂直直线a,为无穷大, 我们改用极坐标形式:xcos
+ ysin =
参数平面为, ,对应不是 直线而是正弦曲线;
使用交点累加器,或交点
统计直方图,找出相交线 段最多的参数空间的点;
f (x, y) exp( x2 y2 )
2 2
高斯函数
G(x, y) f (x, y) g(x, y)
低通滤波
G(x, y) 2[ f (x, y)* g(x, y)] 边缘提取
高斯一拉普拉斯算子(LOG)
G(x, y) 2[ f (x, y)* g(x, y)]
G(x, y) [2 f (x, y)] g(x, y)
i, j
0 1 0
拉普拉斯算子(Laplace)
卷积核 掩膜
0 1 0 1 4 1 0 1 0
取其符号变化的点,即通 过零的点为边缘点,因此 通常也称其为零交叉 (zero-Crossing)点
高斯一拉普拉斯算子(LOG)
首先用高斯函数先进行低通滤波,然后利用 拉普拉斯算子进行高通滤波并提取零交叉点
图 像 空 间
Hough变换的基本思想
《基于视觉的多智能体定位系统与定位算法设计》范文
《基于视觉的多智能体定位系统与定位算法设计》篇一一、引言随着科技的快速发展,多智能体定位系统已经成为机器人技术、自动化技术、智能物流等领域的研究热点。
该系统以多个智能体作为移动主体,实现复杂的任务协同执行,以及空间环境的高效探索与处理。
在众多定位技术中,基于视觉的定位技术因其精度高、信息丰富等优势,逐渐成为主流。
本文将探讨基于视觉的多智能体定位系统的设计与定位算法的优化。
二、多智能体定位系统的设计与视觉技术概述多智能体定位系统主要依靠传感器数据以及图像信息来进行精确的定位。
在众多传感器中,视觉传感器以其获取的丰富信息量,成为多智能体定位系统的关键部分。
通过视觉技术,可以实现对环境的感知、识别和定位。
三、基于视觉的多智能体定位系统设计(一)硬件设计硬件部分主要包括多个搭载视觉传感器的智能体,以及用于数据传输和处理的中央控制系统。
每个智能体配备高清摄像头、图像处理单元等设备,实现对环境的实时监控和数据处理。
(二)软件设计软件部分主要包括图像处理算法、定位算法以及协同控制算法等。
图像处理算法用于提取环境信息,定位算法用于计算智能体的位置,协同控制算法则用于实现多个智能体的协同工作。
四、定位算法的设计与优化(一)特征提取与匹配通过图像处理算法,提取出环境中的特征点或特征线等特征信息,然后利用特征匹配算法,将不同时刻的图像进行匹配,从而实现对智能体的定位。
(二)基于视觉的定位算法优化为了提高定位精度和稳定性,需要采用多种优化算法对定位算法进行优化。
例如,可以采用卡尔曼滤波算法对图像数据进行滤波处理,消除噪声干扰;采用粒子滤波算法对智能体进行精确的轨迹估计等。
(三)协同定位技术通过多个智能体的协同工作,可以实现更大范围的覆盖和更高精度的定位。
协同定位技术需要解决的主要问题是如何实现多个智能体之间的信息共享和协同决策。
可以通过中央控制系统对各个智能体的数据进行融合处理,实现对整个环境的全面感知和精确定位。
五、实验与结果分析(一)实验环境与数据集为了验证基于视觉的多智能体定位系统的性能,我们进行了大量的实验。
机器视觉中的特征提取与目标识别算法

机器视觉中的特征提取与目标识别算法机器视觉是人工智能领域的一个重要分支,它研究如何使机器具备类似于人类的视觉能力。
在机器视觉应用中,特征提取和目标识别算法起着至关重要的作用。
特征提取是将图像中的信息转化为有意义的特征向量的过程,而目标识别算法则是对提取的特征进行分类和识别的过程。
本文将介绍机器视觉中常用的特征提取和目标识别算法。
一、特征提取算法1. 尺度不变特征变换(Scale-Invariant Feature Transform,SIFT)SIFT算法是一种基于图像局部特征的特征提取算法,它能够在不同尺度、旋转和亮度下提取出鲁棒性较高的特征点。
SIFT算法首先使用高斯滤波器进行尺度空间构建,然后对每个尺度的图像进行关键点检测和描述子生成。
最后,通过特征匹配和筛选来实现目标的识别。
2. 方向梯度直方图(Histogram of Oriented Gradients,HOG)HOG算法是一种基于图像梯度的特征提取算法,它通过计算图像中每个小区域的梯度方向直方图来表示图像的特征。
HOG算法在目标识别领域被广泛应用,特别是人体检测和行人识别。
它能够较好地捕捉目标的形状和边缘信息。
3. 卷积神经网络(Convolutional Neural Network,CNN)CNN是一种深度学习算法,在图像特征提取和目标识别中取得了很大的成功。
CNN通过多个卷积层和池化层来逐步提取图像的特征,并通过全连接层将特征映射到目标的类别。
由于CNN能够通过学习得到更复杂、高级的特征表示,它在许多视觉任务中表现出了很强的性能。
二、目标识别算法1. 支持向量机(Support Vector Machine,SVM)SVM是一种经典的机器学习算法,在目标识别中得到了广泛应用。
SVM通过构建一个现行或非线性的分类超平面来实现目标的二分类或多分类。
对于图像分类任务,可以通过提取好的特征向量作为输入,然后使用SVM来训练分类模型,实现目标的识别。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x cos y sin
图像空间
参数空间
映射
正弦 曲线
正弦曲线共线
Hough变换步骤
对影像进行预处理提取特征并计算其梯度方向. 将(,)参数平面量化,设置二维累计矩阵H(i, j).
ij
边缘细化,即在边缘点的梯度方向上保留极值 点而剔除那些非极值点. 对每一边缘点,以其梯度方向为中心,设置 一小区间[-o,+o].
0 1 0
1 4 1
0 1 0
i, j
拉普拉斯算子(Laplace)
卷积核 掩膜
0 1 0
1 4 1
0 1 0
取其符号变化的点,即通 过零的点为边缘点,因此 通常也称其为零交叉 (zero-Crossing)点
高斯一拉普拉斯算子(LOG)
《摄影测量学》
线特征的提取与定位算法
山东交通学院
测绘教研室
主要内容
特征的提取 • 特征点的提取算法 • 特征线的检测方法 特征的定位算法
线特征提取算子
线特征是指影像的“边缘”与“线”
“边缘”可定义为影像局部区域特 征不相同的那些区域间的分界线, 而“线”则可以认为是具有很小宽 度的其中间区域具有相同的影像特 征的边缘对
常用方法有差分算子、拉普拉斯算子、LOG算子等
房屋的提取
道路的提取
线的灰度 特征
一、微分算子
1.梯度算子
G g ( x, y ) g x g y
g 2 g G ( x, y ) m agG ( ) ( ) y x
2 g 2g x
2
2g y 2
2 g ij ( g i 1, j g i , j ) ( g i , j g i 1, j ) ( g i , j 1 g i , j ) ( g i , j g i , j 1 ) g i 1, j g i 1, j g i , j 1 g i , j 1 4 g i , j
平面上都有一个点;
a
b
过xy平面一个点(x,y)的所有直线,构成参数ab平面上 的一条直线。
a b
Hough变换的基本思想
如果点(x1,y1)与点(x2,y2)共线,那么这两点在参数ab平面 上的直线将有一个交点
a’ (x1,y1) y a
b’
b
x
(x2,y2)
在参数ab平面上相交直线最多的点,对应的xy平面上的 直线就是我们的解
i, j
方向二阶差分算子
1 D 1 2 1 2 1 0 0 1 0 1 1 4
i, j
1 0
0 1 0 D1 1 4 1 0 1 0 1 2
1
1 2 1
1 1 1 1 8 1 1 1 1
拉普拉斯算子(Laplace)(高通滤波)
m 1
jg ijWij
g
Wij
原始灰度
定位精度可达0.01像素,这种算法只对圆点定位
Forstner定位算子
Forstner定位算子是摄影测量界著名的定位算子
最佳窗口由Forstner特征提取算子确定 以原点到窗口内边缘直线的距离为观测
值,梯度模之平方为权,在点(x,y)处可列 误差方程:
西南
1 1 1 1 2 1 1 1 1
西北
东南
1 1 1 1 1 1 1 1 1 1 1 1 1 2 1 1 2 1 1 2 1 1 2 1 1 1 1 1 1 1 1 1 1 1 1 1
Canny
特征分割法
影像段有三个特征点组成:一个灰度梯度最 大点和两个突出点。
三个特征点的像素号与两突出点的灰度差为 描述此特征的四个特征参数。
Hough变换
用于检测图像中直线、圆、抛物线、椭圆等
x cos y sin
图 像 空 间
Hough变换的基本思想
xy平面上的任意一条直线y = ax + b ,对应在参数ab
p+q阶原点矩与中心矩
当r小于阈值时,目标不是圆;否则圆 心为(x,y)
Trinder 改进算子
算子受二值化影响,误差可达0.5像素。
1 x M 1 y M
M
n 1 m 1 i 0 j 0
ig
i 0 j 0
n 1
m 1
ij
Wij
i 0 j 0
ij
n 1
Sobel算子
考察它上下、左右邻点灰度的加权差。与 之接近的邻点的权大:
S (i, j ) g (i 1, j 1) 2 g (i 1, j ) g (i 1, j 1) [ g (i 1, j 1) 2 g (i 1, j ) g (i 1, j 1)]
i, j
Prewitt算子与Sobel算子
-1 -1 -1 0 0 0 1 1 1 -1 0 1 -1 0 1 -1 0 1 Prewitt算子
-1 -2 -1
0 0 0
1 2 1
-1
-1
-2
0
1
1
Sobel 算子
-1
2
1
加大模扳 抑制噪声
二阶差分算子
1.方向二阶差分算子
gij ( gi 1, j gi , j ) ( gi , j gi 1, j ) [ gi 1, j gi , j 1 gi 1, j ] 2 gij [1 2 1] 1
Wong-Trinder园点定位算子
利用二值图像重心对圆点进行定位 . 利用阈值T=(最小灰度值十平均灰度值) /2将窗口中的影像二值化 . 计算目标重心坐标(x,y)与圆度 r.
x m10 m00 y m01 m00 M x M y M 20 M 02 Mx 2 M 20 M 02 My 2 ( ( M 20 M 20 M 02 2 2 ) M 11 2 M 02 2 2 ) M 11 2
g (i 1, j 1) 2 g (i, j 1) g (i 1, j 1) [ g (i 1, j 1) 2 g (i, j 1) g (i 1, j 1)]
1 0 1 G x 2 0 2 1 0 1 1 2 1 Gy 0 0 0 1 2 1
内定向
Wong-Trinder圆点定位算子
m pq i p j q g ij
i 0 j 0 n 1 m 1 i 0 j 0 n 1 m 1
( p, q 0,1,2 ) ( p, q 0,1,2 )
M pq (i x) p ( j y ) q g ij
Hough变换
对累计矩阵进行阈 值检测,将大于阈值 的点作为备选点. 取累计矩阵中备选点 中的极大值点为所需的 峰值点,即所检测直线 的参数。(,)
定位算子
数字影像上明显目标主要是指地 面上明显地物在影像上的反映, 或者是数字影像自身的明显标志, 例如道路、河流的交叉口、田角、 房角、建筑物上的明显标志、影 像四角上的框标、地面人工标志 点等等
2
边缘提取
高斯一拉普拉斯算子(LOG)
G( x, y) [ f ( x, y) * g ( x, y)]
2
G( x, y) [ f ( x, y)] g ( x, y)
2
x 2 y 2 2 2 x2 y2 2 f ( x, y ) exp( ) 2 4 2
1 g i , j 1 ] 2 1
i, j
g ij ( g i 1, j g i , j ) ( g i , j g i 1, j ) [ g i , j 1 gi, j
1 g ij 2 1
2
-1 1
方向差分算子
北 东北 东
直线与边 缘的方向
1 1 1 1 2 1 1 1 1
西
1 1 1 1 2 1 1 1 1
南
1 1 1 1 2 1 1 1 1
首先用高斯函数先进行低通滤波,然后利用 拉普拉斯算子进行高通滤波并提取零交叉点
x y f ( x, y ) exp( ) 2 2
2 2
高斯函数
低通滤波
G( x, y) f ( x, y) g ( x, y)
G( x, y) [ f ( x, y) * g ( x, y)]
LOG算子以 2 f ( x, y) 为卷积核,对原灰度函数进行 卷积运算后提取零交叉点为边缘
边缘检测算子比较结果
Sobel
Prewitt
Roberts
Laplacian of Gaussian
Canny
原始图像
Sobel
Prewitt
Roberts
Laplacian of Gaussian
Roberts梯度
m
2
2 2 2 mg g
随机误差
梯度方向代替直线方向存在不容忽视的模型 误差,Hough变换等使用梯度方向的方法不 可能达到很高的精度。
高精度角点与直线定位算子
数学模型
g ( x) S ( x)dx
x
一维边缘的成像为刀刃曲线
1 1 exp[ 2 ( x cos y sin ) 2 ] 2 2
线扩散函数
S ( x, y )