自定义Simulink模块方法
Matlab-Simulink基本模块操作
第2章 Simulink模块操作
表 2-2 控制模块方块图的参数
参数
定义
ScreenColor BackgroundColor
模型方块 图的背景色 模块和标 注的背景色
Fore groun dColor
模块和标 注的前景色
第2章 Simulink模块操作
用户可以把这些参数设置为如下任一值: 'black','white','red','green','blue','cyan','magenta',
第2章 Simulink模块操作
Simulink模块操作
2.1 模块操作 2.2 改变模块外观 2.3 设置模块参数 2.4 标注方块图 2.5 模块属性对话框 2.6 显示模块输出 2.7 控制和显示模块的执行顺序 2.8 查表编辑器 2.9 鼠标和键盘操作概述
第2章 Simulink模块操作
2.1 模 块 操 作
2.1.1 Simulink模块类型 用户在创建模型时必须知道,Simulink把模块分为两种
类型:非虚拟模块和虚拟模块。非虚拟模块在仿真过程中起 作用,如果用户在模型中添加或删除了一个非虚拟模块,那 么Simulink会改变模型的动作方式;相比而言,虚拟模块在 仿真过程中不起作用,它只是帮助以图形方式管理模型。此 外,有些Simulink模块在某些条件下是虚拟模块,而在其他 条件下则是非虚拟模块,这样的模块称为条件虚拟模块。表 2-1列出了Simulink中的虚拟模块和条件虚拟模块。
第2章 Simulink模块操作 图2-10
第2章 Simulink模块操作
2.2.3 指定方块图颜色 Simulink允许用户在方块图中指定任何模块或标注的前景色
Simulink自定义模块的建立
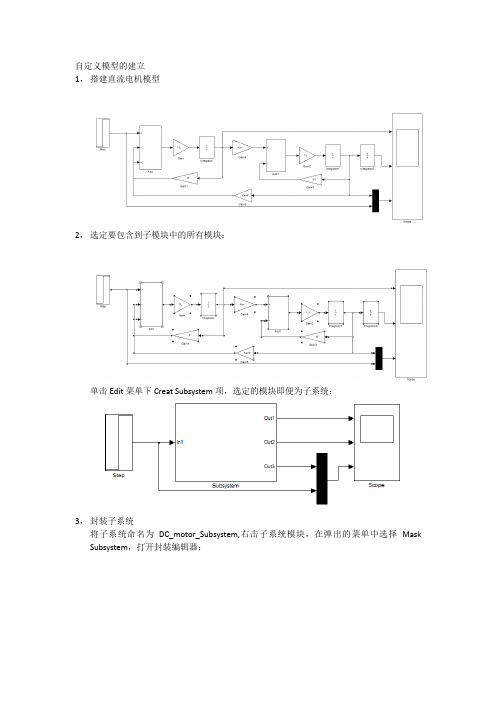
自定义模型的建立1,搭建直流电机模型2,选定要包含到子模块中的所有模块:单击Edit菜单下Creat Subsystem项,选定的模块即便为子系统:3,封装子系统将子系统命名为DC_motor_Subsystem,右击子系统模块,在弹出的菜单中选择Mask Subsystem,打开封装编辑器:Icon&Ports选项卡可对模块的外框,透明度,图表等进行设置。
在Icon Drawing Command 区域中可用命令改变端口名称,添加图片,修改颜色等。
以下命令用于修改端口名称及颜色:color('red');port_label('input',1,'Control Signal');color('red');port_label('output',1,'Torque');color('red');port_label('output',2,'Angle');color('red');port_label('output',3,'Speed');输入命令后单击OK,则则子模块变为:若要添加图片,需将图片放在模型所在目录下,命名为‘DC_motor’,在Icon Drawing Command区域内输入命令:image(imread('DC_motor.jpg'))则子模块变为:4,添加模块到库浏览器在Simulink库浏览器窗口,选择File菜单下New—Library,打开库编辑窗口,将封装后的DC_motor_subsystem拖入库编辑器并保存为DC_motor_subsystem_lib.mdl。
编写M函数代码:并保存在DC_motor_subsystem_lib.mdl所在目录下,重新打开模块库,则自定义模块添加成功:注意事项:在建模过程中,应注意模型名称是否拼写正确等细节问题。
simulink c function 使用
simulink c function 使用标题:深入理解与应用Simulink C FunctionSimulink是MATLAB中的一款强大工具,用于模拟、设计和实现复杂的动态系统。
在Simulink中,C Function是一种非常实用的模块,它允许用户直接在模型中插入自定义的C代码,从而实现更高级别的控制和定制功能。
以下是一步一步解析Simulink C Function的使用方法。
第一步:理解Simulink C FunctionSimulink C Function模块是一个预定义的库模块,它允许用户在Simulink模型中嵌入C代码。
这种模块的主要优点是可以利用C语言的强大功能和灵活性,进行更复杂和高效的算法设计。
同时,由于C代码可以直接编译并集成到生成的可执行文件中,因此可以显著提高模型的运行效率。
第二步:创建和配置Simulink C Function模块在Simulink模型中,可以通过以下步骤创建和配置C Function模块:1. 打开Simulink模型,然后在“Library Browser”中搜索"C Function",将其拖放到工作区。
2. 双击新添加的C Function模块,打开"C Function Parameters"对话框。
3. 在"C Function Parameters"对话框中,可以设置C函数的基本属性,如函数名称、输入和输出参数的数量和类型等。
这些设置将直接影响到生成的C代码。
第三步:编写C代码在配置好C Function模块后,接下来就是在"C Code"选项卡中编写C代码。
这里需要注意以下几点:1. 输入和输出变量:在"C Code"选项卡中,Simulink已经为我们生成了输入和输出变量的声明和初始化代码。
我们只需要在这些变量的基础上编写我们的算法代码。
Simulink中的自定义模块
目录Fcn 模块 (1)MATLAB Fcn 模块 (2)S Function (System Function) (2)1. 函数的函数头 (3)2. 函数分析 (3)3.带参数的S函数 (5)4.S函数格式及说明 (6)simulink中子模块的封装 (11)Fcn 模块Fcn模块对它的输入进行指定的表达式运算。
使用的表达式可由下面的一个或多个部分组成。
u --- 模块的输入。
如果u是一个向量,u(i)表示此向量的第i个元素;u(1)或者u表示第一个元素数值常数(例如表达式5.2*u)算术运算符(+ - * / ^ 例如表达式u^2+5.2)关系运算符(== != > < >= <=) --表达式返回1,如果关系为真; 否则返回0逻辑运算符(&& || !) 表达式返回1,如果关系为真; 否则返回0括号数学函数(abs, acos, asin, atan, atan2, ceil, cos, cosh, exp, fabs, floor, hypot, ln, log, log10, pow, power, rem, sgn, sin, sinh, sqrt, tan, tanh.)Workspace中定义的变量–如果变量名字不是Matlab 保留字符(比如sin),变量名字会被传递给Matab,从而在Maltab Workspace中获取相应给定的值。
矩阵或者向量必须具体到其对应的元素。
(比如A(1,1))注意:Fcn模块中使用的表达式不支持矩阵运算,同样不支持(:) 符。
模块输入可以是标量或者向量,但输出总是标量数值。
MATLAB Fcn 模块MATLAB Fcn模块对它的输入进行指定的Matlab函数或者表达式运算。
输出尺寸必须和模块中定义的尺寸相符,否则报错。
下面是MATLAB Fcn模块中可以使用的有效表达式sin atan2(u(1),u(2)) u(1)^u(2)注意:同Fcn模块相比,在仿真中MATLAB Fcn模块速度要慢,因为它需要在每个积分步骤中调用Maltab编译器。
Simulink自定义函数
Simulink调用M文件在SIMULINK user-defined function里面有各种可以调用的自定义函数,其中embedded MATLAB function、m-file s-function 、s-function等等又可以实现m文件被simulink所调用。
如果你是初学者,不妨使用embedded MATLAB function。
注意定义好输入输出的个数。
比如sin:function y = fcn(u)y = sin(u);函数输出可以直接接simulink其它各种信号器件。
simulink仿真设置一、算法设置1.变步长(Variable—Step)求解器可以选择的变步长求解器有:ode45,ode23,ode113,odel5s,ode23s和discret.缺省情况下,具有状态的系统用的是ode45;没有状态的系统用的是discrete。
1)ode45基于显式Runge—Kutta(4,5)公式,Dormand—Prince对.它是—个单步求解器(solver)。
也就是说它在计算y(tn)时,仅仅利用前一步的计算结果y(tn-1).对于大多数问题.在第一次仿真时、可用ode45试一下。
2)ode23是基于显式Runge—Kutta(2,3).Bogackt和Shampine对.对于宽误差容限和存在轻微刚性的系统、它比ode45更有效一些.ode23也是单步求解器。
3)odell3是变阶Adams-Bashforth—Moulton PECE求解器.在误差容限比较严时,它比ode45更有效.odell3是一个多步求解器,即为了计算当前的结果y(tn),不仅要知道前一步结果y(tn-1),还要知道前几步的结果y(tn-2),y(tn-3),…;4)odel5s是基于数值微分公式(NDFs)的变阶求解器.它与后向微分公式BDFs(也叫Gear方法)有联系.但比它更有效.ode15s是一个多步求解器,如果认为一个问题是刚性的,或者在用ode45s时仿真失败或不够有效时,可以试试odel5s。
Simulink中的自定义模块
目录Fcn 模块 (1)MATLAB Fcn 模块 (2)S Function (System Function) (2)1. 函数的函数头 (4)2. 函数分析 (4)3.带参数的S函数 (8)4.S函数格式及说明 (9)simulink中子模块的封装 (16)Fcn 模块Fcn模块对它的输入进行指定的表达式运算。
使用的表达式可由下面的一个或多个部分组成。
u --- 模块的输入。
如果u是一个向量,u(i)表示此向量的第i个元素;u(1)或者u表示第一个元素数值常数(例如表达式5.2*u)算术运算符(+ - * / ^ 例如表达式u^2+5.2)关系运算符(== != > < >= <=) --表达式返回1,如果关系为真; 否则返回0逻辑运算符(&& || !) 表达式返回1,如果关系为真; 否则返回0括号数学函数(abs, acos, asin, atan, atan2, ceil, cos, cosh, exp, fabs, floor, hypot, ln, log, log10, pow, power, rem, sgn, sin, sinh, sqrt, tan, tanh.) Workspace中定义的变量–如果变量名字不是Matlab 保留字符(比如sin),变量名字会被传递给Matab,从而在Maltab Workspace中获取相应给定的值。
矩阵或者向量必须具体到其对应的元素。
(比如A(1,1))注意:Fcn模块中使用的表达式不支持矩阵运算,同样不支持(:) 符。
模块输入可以是标量或者向量,但输出总是标量数值。
MATLAB Fcn 模块MATLAB Fcn模块对它的输入进行指定的Matlab函数或者表达式运算。
输出尺寸必须和模块中定义的尺寸相符,否则报错。
下面是MATLAB Fcn模块中可以使用的有效表达式sin atan2(u(1),u(2)) u(1)^u(2)注意:同Fcn模块相比,在仿真中MATLAB Fcn模块速度要慢,因为它需要在每个积分步骤中调用Maltab编译器。
m函数生成simulink模块
m函数生成simulink模块1. 引言m函数是一种在MATLAB中常用的编程语言,用于实现特定的功能和算法。
Simulink是MATLAB的一个功能强大的工具箱,用于建模、仿真和分析动态系统。
在Simulink中,可以通过使用m函数来创建自定义的模块,以便实现更复杂的系统模型。
本文将深入探讨如何使用m函数生成Simulink模块,并提供一些实例来帮助读者更好地理解。
2. m函数简介m函数是MATLAB中用于实现特定功能的自定义函数。
它由一系列的MATLAB代码组成,可以接受输入参数,并返回输出结果。
m函数的语法与MATLAB脚本文件相似,但具有更大的灵活性和复用性。
在Simulink中,m函数可以用于创建自定义的模块,以便在系统建模过程中使用。
3. Simulink模块的生成过程3.1 创建m函数文件首先,我们需要创建一个m函数文件。
在MATLAB的当前工作目录下,右键点击鼠标并选择”New”->“Function”,然后输入文件名并选择”m文件”作为文件类型。
点击”Save”按钮后,MATLAB将自动创建一个空的m函数文件,并将其打开以供编辑。
3.2 编写m函数代码在m函数文件中,我们可以根据具体需求编写自定义的MATLAB代码。
这些代码既可以是编写好的函数调用,也可以是一系列的算法和计算过程。
无论是什么样的代码,都需要满足函数的输入输出要求。
例如,我们要编写一个简单的m函数用于计算两个数的和。
代码如下:function output = add(a, b)output = a + b;end在上述代码中,我们定义了一个名为”add”的m函数,它接受两个输入参数a和b,并返回它们的和。
3.3 保存并添加到Simulink模型中在完成m函数的编写后,我们需要将其保存,并添加到Simulink模型中以供使用。
首先,点击m函数文件编辑器的”Save”按钮保存代码。
然后,在Simulink模型编辑器中,选择”Library Browser”视图,然后在浏览器窗口中找到并双击”User-Defined Functions”库。
Simulink自定义模块的建立
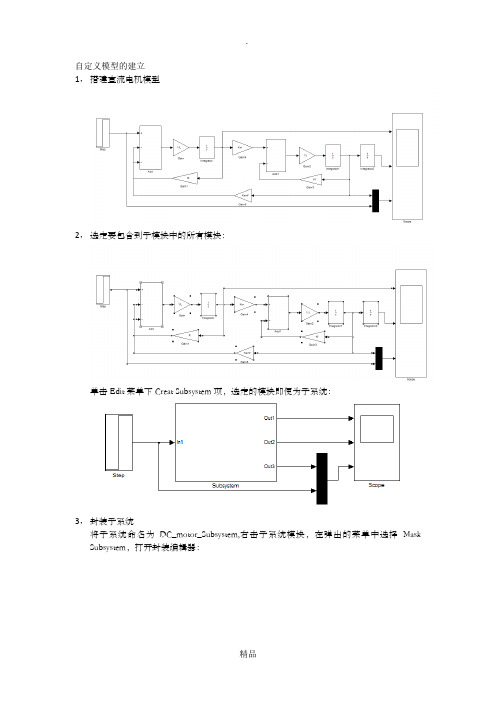
自定义模型的建立1,搭建直流电机模型2,选定要包含到子模块中的所有模块:单击Edit菜单下Creat Subsystem项,选定的模块即便为子系统:3,封装子系统将子系统命名为DC_motor_Subsystem,右击子系统模块,在弹出的菜单中选择Mask Subsystem,打开封装编辑器:Icon&Ports选项卡可对模块的外框,透明度,图表等进行设置。
在Icon Drawing Command 区域中可用命令改变端口名称,添加图片,修改颜色等。
以下命令用于修改端口名称及颜色:color('red');port_label('input',1,'Control Signal');color('red');port_label('output',1,'Torque');color('red');port_label('output',2,'Angle');color('red');port_label('output',3,'Speed');输入命令后单击OK,则则子模块变为:若要添加图片,需将图片放在模型所在目录下,命名为‘DC_motor’,在Icon Drawing Command区域内输入命令:image(imread('DC_motor.jpg'))则子模块变为:4,添加模块到库浏览器在Simulink库浏览器窗口,选择File菜单下New—Library,打开库编辑窗口,将封装后的DC_motor_subsystem拖入库编辑器并保存为DC_motor_subsystem_lib.mdl 。
编写M函数代码:并保存在DC_motor_subsystem_lib.mdl所在目录下,重新打开模块库,则自定义模块添加成功:注意事项:在建模过程中,应注意模型名称是否拼写正确等细节问题。
Simulink自定义功能模块
Simulink自定义功能模块前面讲述了使用Simulink中现有的模块进行仿真,但在实际中,可能有些需要用到的模块在Simulink中没有,因此需要Simulink的模块进行扩展,以适应特殊的仿真应用。
3.7.1自定义功能模块的创建Simulink提供了自定义功能模块,用户只要按照其规定要求定义一些模块,便可在Simulink仿真中调用和加以使用。
自定义功能模块的创建有以下两种方法。
(1)一种方法是采用Signal&Systems模块库中的Subsystem功能模块,利用其编辑区设计组合新的功能模块。
基本操作:首先将Signal&Systems模块库中的Subsystem功能模块复制到打开的模型窗口中,然后双击Subsystem功能模块,进入自定义功能模块窗口,即可利用已有的基本功能模块设计出新的功能模块。
(2)另一种方法是将现有的多个功能模块组合起来,形成新的功能模块。
基本操作:在模型窗口中建立所定义功能模块的子模块。
用鼠标将这些需要组合的功能模块选中,然后选择Edit菜单下的Create Subsystem即可。
对于很大的Simulink模型,通过自定义功能模块可以简化图形,减少功能模块的个数,有利于模型的分层构建。
3.7.2自定义功能模块的封装上面提到的两种方法都只是创建一个功能模块而已,如果要命名该自定义功能模块、对功能模块进行说明、选定模块外观、设定输入数据窗口,则需要对其进行封装处理。
首先选中Subsystem功能模块,再打开Edit菜单中的Mask Subsystem进入mask的编辑窗口,可以看出有3个标签页。
1. Icon标签页它用于设定功能模块外观,最重要的部分是Drawing Commands,在该区域内可以用disp指令设定功能模块的文字名称,用plot指令画线,用dpoly指令画转换函数。
注意:尽管这些命令在名字上和以前讲的MATLAB函数相同,但它们在功能上却不完全相同,因此不能随便套用以前所讲的格式。
智能车辆控制SIMULINK仿真中自定义模块的创建
函数。与 MATLAB 函数 一样 , 在嵌入 式 MA TLAB 函 数模块中 ,用户可以根据需要定义局部变量和确定变 量的类型和大小 ,而且变 量一旦被定义 ,就不能被重 新定义为其他的类型和大小 ;用户可以在函数体中定 义子函数 ,也可以从库函数中调用子函数 。与 M文件 S函数模块不同的是 ,在模块窗 口双击此模块会弹出 M 文件编辑框 ,然后就可以自行随意的编写能够完成 期望功能的代码 。
S IIMUL INK的应用领域 。
关键词 : SIMUL INK; 嵌 入式 MATLAB 函 数 ; M 文
件 ; 自定义模块 ;智能车辆控制
中图分类号 : TP273
文献标识码 : A
C r ea t ion of cu stom b lock in S IM UL I NK on in telligen t veh icle
引言
SIMUL IN K是 MATLAB 中用来对动态系统进行建 模 、仿真和分析的集成环境 。它可以完成对线性和非 线性系统 ,连续系统 、离散系统及两者的混合系统的建 模并进行仿 真。 SIMUL IN K的 仿真是 交互式 的 ,用户 在建立系统模型后可以随时改变系统参数 ,并可以观 察参 数改变后的仿真结果 或将结果储存于工作空间 中 。使得仿真过程变得简单而有效 ,也正是由于这个 特点 ,使应用 SIMUL INK进行的仿 真被广泛应用于控 制系统、数据采集和处理、DSP 和通信等许多领域 [1 ] 。
SIMUL IN K中包含了 大量的 模块 ,可以方 便地进 行仿真 ,但对于比较复杂的控制规律或算法 ,利用现有 的模块库进行建模会比较困难 ,这时可以引入具有自 定义功能的函数 [2 - 5 ] 。借助函数的自定义功能 ,用户 可以开发新 的通用模块 ,实现 新算法 ,在以 往的研究 中 ,利用 S函 数的比较多 ,很大 程度上解决 了一些问 题 。但是 S 函 数 实 质 上 是 具 有 特 殊 调 用 格 式 的 MATLAB 函数 ,缺乏实现算法灵活性和简洁性 ,不适用 于非专业用户 ,MATLAB710提供了可以自由实现算法 的嵌入式 MATLAB 函数 模块 正好 弥补 了这 一不 足。 它提供了扩展 SIMUL INK功 能的有力工具 ,并且嵌入 式 MATLAB 函数模块具有能够继承 SIMUL INK的输入 输出信号和可以取代仿真模块简化仿真的优点 ,用户 可以建立一个能和 SIMUL INK模块库中的模块一起使 用的新模块 ,不断扩充 S IMUL IN K的仿真功能 [ 6] 。
simulink中function模块
simulink中function模块Simulink是一款广泛应用于系统建模、仿真和控制设计的软件工具。
它提供了丰富的模块库,包括数学运算、信号处理、控制系统等模块,同时还支持用户自定义模块。
其中,Function模块是Simulink中比较重要的一个模块,它可以实现用户自定义函数的功能。
本文将详细介绍Simulink中Function模块的使用方法和注意事项。
一、Function模块概述1.1 Function模块介绍Function模块是Simulink中的一个子系统,它可以实现用户自定义函数的功能。
在Function模块内部,可以使用Matlab语言编写函数,并将其作为子系统插入到整个系统中。
因此,Function模块可以大大提高Simulink的灵活性和可扩展性。
1.2 Function模块分类根据不同的使用方式,Function模块可以分为以下两类:(1)Interpreted Matlab Function:这种类型的Function模块使用Matlab语言编写函数,并在仿真时动态解释执行。
因此,在仿真过程中会比较耗费计算资源。
(2)Code Generation Matlab Function:这种类型的Function模块使用Matlab语言编写函数,并在仿真前生成C代码。
因此,在仿真时执行速度比较快,但需要占用一定的内存空间。
二、Function模块的使用方法2.1 Function模块的创建在Simulink中创建Function模块的方法如下:(1)在Simulink模型中右键单击空白处,选择“Add”->“Subsystem”->“Function”。
(2)在弹出的对话框中,输入Function模块的名称和路径。
路径可以是相对路径或绝对路径。
(3)点击“OK”按钮,即可创建一个新的Function模块。
2.2 Function模块内部结构Function模块内部包含以下几个部分:(1)Inputs:输入端口,用于接收外部输入信号。
Simulink如何自定义数据类型(enum和struct)
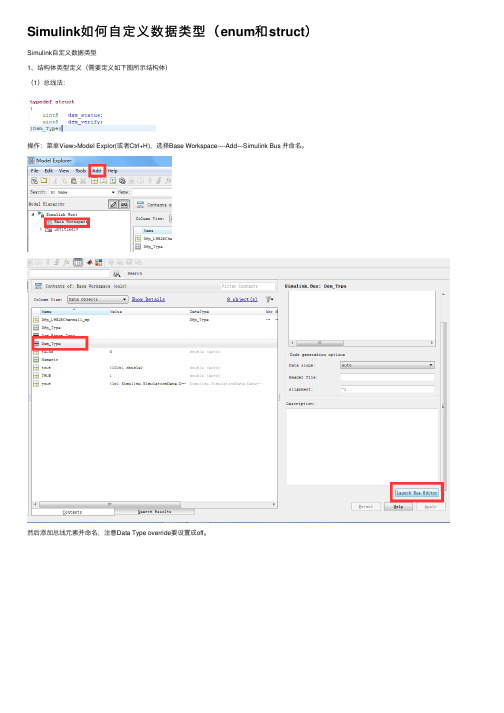
Simulink如何⾃定义数据类型(enum和struct)Simulink⾃定义数据类型
1、结构体类型定义(需要定义如下图所⽰结构体)
(1)总线法:
操作:菜单View>Model Explor(或者Ctrl+H),选择Base Workspace----Add---Simulink Bus 并命名。
然后添加总线元素并命名,注意Data Type override要设置成off。
⽣成的结构体如下图所⽰
(2)外部引⽤法、在h⽂件中定义所有结构类型,使⽤Simulink Alias创建数据类型,选择Base Workspace----Add---Simulink Alias,命名并设置Base type,设置Data scope为imported,Header file中填写.h⽂件名,.h⽂件需放在Matlab⼯作⽬录下。
这样在变量中就可以选择此数据类型了,如图
⽣成的代码如下,并在⾃动⽣成的untitled1_types.h⽂件中添加了外部h⽂件。
2、枚举类型的定义
例如,定义⼀个枚举变量类型weekdays,如下定义:
保存为m⽂件,类名必须和⽂件命名⼀致,并且要放在独⽴的⼀个.m⽂件中,使⽤时只需要在信号属性中选择Enum:weekdays
在simulink中使⽤时采⽤类似如下结构体的⽅式:weekdays.Mon
枚举类型最终⽣成代码如下图:(⽣成代码时要去掉Display模块)。
Simulink自定义功能模块
Simulink自定义功能模块前面讲述了使用Simulink中现有的模块进行仿真,但在实际中,可能有些需要用到的模块在Simulink中没有,因此需要Simulink的模块进行扩展,以适应特殊的仿真应用。
3.7.1自定义功能模块的创建Simulink提供了自定义功能模块,用户只要按照其规定要求定义一些模块,便可在Simulink仿真中调用和加以使用。
自定义功能模块的创建有以下两种方法。
(1)一种方法是采用Signal&Systems模块库中的Subsystem功能模块,利用其编辑区设计组合新的功能模块。
基本操作:首先将Signal&Systems模块库中的Subsystem功能模块复制到打开的模型窗口中,然后双击Subsystem功能模块,进入自定义功能模块窗口,即可利用已有的基本功能模块设计出新的功能模块。
(2)另一种方法是将现有的多个功能模块组合起来,形成新的功能模块。
基本操作:在模型窗口中建立所定义功能模块的子模块。
用鼠标将这些需要组合的功能模块选中,然后选择Edit菜单下的Create Subsystem即可。
对于很大的Simulink模型,通过自定义功能模块可以简化图形,减少功能模块的个数,有利于模型的分层构建。
3.7.2自定义功能模块的封装上面提到的两种方法都只是创建一个功能模块而已,如果要命名该自定义功能模块、对功能模块进行说明、选定模块外观、设定输入数据窗口,则需要对其进行封装处理。
首先选中Subsystem功能模块,再打开Edit菜单中的Mask Subsystem进入mask的编辑窗口,可以看出有3个标签页。
1. Icon标签页它用于设定功能模块外观,最重要的部分是Drawing Commands,在该区域内可以用disp指令设定功能模块的文字名称,用plot指令画线,用dpoly指令画转换函数。
注意:尽管这些命令在名字上和以前讲的MATLAB函数相同,但它们在功能上却不完全相同,因此不能随便套用以前所讲的格式。
simulink中function模块
simulink中function模块在Simulink中,Function模块是一个用于组织和封装可重用代码的容器。
通过Function模块,我们可以在Simulink模型中编写自定义的MATLAB函数,并将其用作模型的子系统。
Function模块可以用于处理输入信号、执行算法、进行状态更新等等。
在本篇文章中,我们将介绍如何使用Function模块以及一些最佳实践。
首先,我们需要创建一个新的Simulink模型,并在模型中添加一个Function模块。
要添加Function模块,我们可以在Simulink库浏览器中选择"User-Defined Functions"类别,然后从该类别中拖动Function模块到模型中。
一旦我们添加了Function模块,我们就可以在其中编写MATLAB代码。
需要注意的是,Function模块中的代码不能调用Simulink模型中的其他块。
然而,我们可以将输入信号传递给Function模块,并从Function模块返回输出信号。
为了实现这一点,我们可以在Function模块上使用输入和输出端口。
要定义输入和输出端口,我们可以右键单击Function模块,在弹出菜单中选择"Add Input"或"Add Output"选项。
然后,我们可以为每个端口指定名称、数据类型和尺寸。
在Function模块中,我们可以使用这些端口来访问输入信号并生成输出信号。
需要注意的是,输入和输出信号的数据类型和尺寸必须与端口定义一致。
在Function模块中,我们可以使用各种MATLAB函数和语句来处理输入信号、执行算法等等。
我们可以使用MATLAB函数来进行数学运算、条件判断、函数调用等等。
此外,我们还可以在Function模块中定义局部变量,并使用它们来存储中间结果。
这些局部变量的作用域仅限于Function模块。
在编写代码时,我们需要注意一些最佳实践。
Simulink 自定义库
Simulink自定义库为了实现模块共享或复用,可以将一些常用功能模块定义成库模块。
另外也可以将一些Simulink模块参数进行定制,并将其定义成自定义库,以满足用户要求。
术语链接模块:当将封装的库模块或Subsystem 模块从库中添加到Simulink模型中时,将创建库模块的引用实例。
库模块的这种引用实例称为链接模块,其中包含指向父级库模块的链接或路径。
这个链接或路径可使链接模块随着库模块的更新而更新。
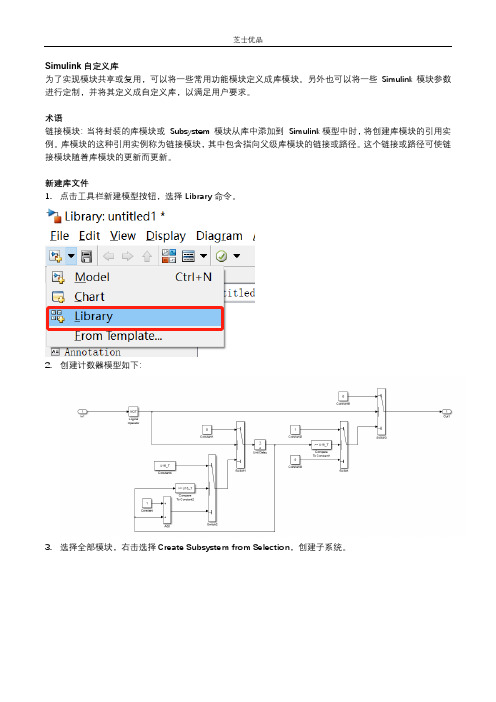
新建库文件1.点击工具栏新建模型按钮,选择Library命令。
2.创建计数器模型如下:3.选择全部模块,右击选择Create Subsystem from Selection,创建子系统。
4. 删除子系统外部输入和输出端口5. 封装子系统:右击选择Mask->Create Mask…6. 封装之后效果,具体封装过程参考模块封装章节。
7. 在Library Browser 显示自定库,需要在保存库之前启用模型属性EnableLBRepository。
在命令窗口中输入以下命令:set_param(gcs,'EnableLBRepository','on');注意如果您保存库时没有将'EnableLBRepository'设置为'on',Library Browser 的顶部将显示一条消息。
请点击Fix并根据提示进行操作。
8.将自定义库添加到Library Browser:右键点击保存自定义库的文件夹(本例保存在:D:\Model资料),并选择New File > Script。
将文件命名为slblocks.m。
9. 在Library Browser 中,执行刷新操作以查看新库和子库。
右键点击库列表并选择Refresh LibraryBrowser。
或按F5键。
10.在Library Browser 中,可以看到刚自定的库。
SIMULINK中自定义模块的创建与封装
系 统 仿 真 学 报 V ol. 16 No. 3 JOURNAL OF SYSTEM SIMULATION March. 2004• 488 •SIMULINK 中自定义模块的创建与封装胡琳静, 孙政顺介绍SIMULINK 中用S-函数编写了实现跟踪-微分器算法的M 源文件SIMULINK 中S-函数自定义算法模块可以大大减少工程人员的编程工作量一方面简化了数字仿真过程关键词S-函数1004-731XDepartment of Automation, Tsinghua University, Beijing 100084, Chinaworkload, and simplify complex blocks group. In addition, it can visualize a process being simulated. S-Function extendsapplication fields of SIMULINK as well as simplifies digit simulation course. Keywords从名字上看“SIMU”一词表明它可以用于计算机仿真即把一系列模块连接起来在保持MATLAB 一般性能基础上离散系统并且可以观察仿真的执行过程也正是由于这些卓越的功能汽车设计等诸多领域仿真的首选语言其模块库中提供了丰富的模块SourcesContinuous MathFunction & TablesSubsystems2002-12-06 修回日期胡琳静女研究方向为控制系统的仿真; 孙政顺清华大学自动化系副教授研究方向为控制理论与控制工程有的模型可能更适合于MATLAB 或C 语言的编写方法实现特殊的算法S-函数正好弥补了这一不足并且支持参数传递利用封装产生一个与S-函数文件相对应的对话框和模块图标1 S-函数S-函数实质上是具有特殊调用格式的MATLAB 函数以连续表征系统动态特性用户使用S-函数增加一个模块函数至SIMULINK以数学方程形式描述系统输入向量u这些不同向量之间的关系用如下等式来描述V ol. 16 No. 3March. 2004 胡琳静, 等第一部分表示连续状态则x 是空向量SIMULINK 自始至终在向量更新阶段产生重复调用每个子程序常以mdl 开头function [sys,x 0,str,ts]=function-name(t, x, u, flag, p 1, …, p n )其中分别为时间见表1也就是希望赋给S-函数的可选变量sys当flag=0时sys(2)=离散状态数这四个值可以置为-1sys(5)=0为root finding 保护0表示“no”x状态有序串tstflag 由SIMULINK 自动传给S-函数可选每个模块都对应一个S-函数源文件也可用C或者FORTRAN 文件编写用户根据需要创建自定义模块的关键也就在于S-函数的正确编制及调用建立一个SIMULINK 自定义模块首先考虑微分-跟踪器x 1(k+1)=x 1(k)+Tx 2(k)x 2(k+1)=x 2(k)+Tfst(x 1(k), x 2(k), u(k), r, h)式中r 决定跟踪快慢的参数决定滤波效果的参数ä=rhy=x 1-u+hx 2a=x 2+y/h当|y|﹥ä0时fst=-ra/ä当|a|﹥ä时用Simulink 模块搭建起来比较困难其S-函数M 源文件的编写过程如下跟踪信号和微分信号sizes.NumInputs=1; %系统输入信号一路 sizes.DirFeedthrough=0; %输入不直接传到输出口 sizes.NumSampleTimes=1; %单个采样周期sys=simsizes(sizes); %根据上面的设置设定系统初始化参数 x0=[0;0]; %设置初始状态为零状态 str=[]; %将str 变量设置为空字符串即可 ts=[-1 0]; %采样周期V ol. 16 No. 3系统仿真学报 March. 2004 • 490 •%mdlUpdate flag值为2时计算输出变量fst2 %*************************************************function f=fst2(x,u,r,h)delta=r*h;delta0=delta*h;y=x(1)-u+h*x(2);a0=sqrt(delta*delta+8*r*abs(y));if abs(y)<=delta0a=x(2)+y/h;elsea=x(2)+0.5*(a0-delta)*sign(y);endif abs(a)<=deltaf=-r*a/delta;elsef=-r*sign(a);end我们将该程序以文件名han_td.m 保存就是在主程序中根据需要调用有关子程序2输出计算等各阶段该自定义模块的创建不仅能充分演示S-函数的使用也能为某些系统的控制提供较好的解决方案产生用户自定义运算模块以外我们还可以使用MATLBA 句柄图形在S-函数中创建动画因此是自定义阱点Sinks Initialization和Update编程的核心应集中在Initialization和Update在Update中改变物体的属性促使物体以S-函数模块输入的函数方式运动或改变涉及比较多的参数这里不做赘述封装是为了完成一个特定的任务从封装中可以看到连接每个用户域的特定模块的产生以及SIMULINK 模型的简化就可以对这些能实现特殊算法的模块进行封装和测试了1Block Parameters选择该模块或者点击右键在Icon页中MATLAB 的有关绘图命令绘制模块图标在Documentation 页中添加模块的说明和帮助文档给模块命名建立一个简单的仿真模型框图可以连同S-函数M源文件拷贝到其它SIMULINK 模型中使用并存为ex_han.mdl 文件将给出如图2所示的S-函数参数设置对话框在S-function parameters栏目还可以给出S-函数的附加参数在MATLAB工作空间中用命令输入这些参数我们用MATLAB 函数的形式建立起输入信号的模块function y=han_fun(x)if x<=2*pi, %第一个周期生成标准的正弦信号y=sin(x);elseif x<=2.5*pi, %本周期内生成三角波V ol. 16 No. 3March. 2004 胡琳静, 等后接一个周期的三角波信号再进行仿真可以看出采用跟踪-微分器就可以快速地跟踪输入信号由于r 参数决定跟踪的速度在随机扰动下由较大的r 值引起的跟踪误差也增大4 结论本文对仿真软件SIMULINK 中S-函数的工作原理通过对能实现跟踪-微分器算法的自定义模块的M 源文件的编写在SIMULINK 框图中差分方程完全可以根据M 文件的基本框架使仿真模型具有更强的有可移植性[1] James B. Dabney, Thomas L. Harman. Mastering SIMULINK2[M]. UpperSaddle River, N.J: Prentice Hall, 1998. [2] 韩京清1999268-273.[3] 王沫然.Simulink 4建模及动态仿真[M]. 北京清华大学出版社马松辉.Simulink 建模与仿真[M]. 西安上接第487页同时考虑地表对流辐射边界条件3) 考虑大地温度场影响的基础上4) 计算时考虑管道周围土壤发生热物性非均匀性以及大气温度周期性变化等影响因素5) 以新疆油田401直埋保温输油管道为例本文在考虑大气温度季节性温度变化对土壤温度场影响的基础上从而简化了数值计算过程数值计算出的直埋管道周围温度场与实际测出的温度数据基本相符参考文献: [1]穆树芳. 直埋供热管道技术[M]. 北京: 中国矿业大学出版社, 1997, 2-3.[2] 樊洪明. 地下直埋管道的温度场分析[J]. 哈尔滨建筑大学学报, 1999, 32(5): 60-63.[3] 姜笃志. 输油管道非稳定热力过程数值分析[J]. 油气储运, 1996, 15(8): 21-24.[4] 章熙民. 传热学[M]. 北京: 中国建筑工业出版社, 1993, 66-69. [5] B.M.阿卡帕金, Б.Л.克里沃夫舍因. 原油和油品管道热力计算[M]. 北京: 石油工业出版社, 1980, 45-46.[6] 钱壬章, 俞昌铭, 林文贵. 传热分析与计算[M]. 北京: 高等教育出版社, 1987.[7] D.R.克罗夫特, D.G.利. 传热的有限差分计算[M]. 北京: 高等教育出版社, 1980.万方数据。
simulink仿真环境自定义之菜单项目

%% 20160916LY--2283107147QQ交流 项目:simulink环境自定义——菜单自定义
% 自定义菜单项目目标: 左击Tools-菜单(或右击模块-菜单)--Hyo Customized(Container Schema Object)--block property(Action Schema Object)--获得当前模块的属性列表
% 自定义菜单项目: 左击菜单Hyo Customized--block property
cm.addCustomMenuFcn('Simulink:MenuBar', @custom_items);
% 自定义菜单项目: 左击Tools-菜单--Hyo Customized--block property
function schemaFcns = custom_items(callbackInfo)
schemaFcns = {@menu_control};
end
%% 1. 创建菜单项目的模式schema函数文件(或如 menu_control.m)
% 1.1 定义菜单下的Hyo Customized菜单项的函数
cm.addCustomMenuFcn('Simulink:ToolsMenu', @custom_items);
% 自定义菜单项目: 右击模块-菜单--Hyo Customized--block property
cm.addCustomMenuFcn('Simulink:PreContextMenu', @custom_items);
simulink中generated s-function模块例子
simulink中generated s-function模块例子全文共四篇示例,供读者参考第一篇示例:Simulink中的Generated S-Function模块是一种非常强大且灵活的工具,可以帮助用户实现特定的功能和算法。
通过使用Generated S-Function模块,用户可以方便地在Simulink环境中嵌入自己编写的C或C++代码,从而实现更加复杂和个性化的模型。
下面我们通过一个例子来演示如何在Simulink中使用Generated S-Function模块。
假设我们要实现一个简单的加法器模块,将两个输入相加并输出结果。
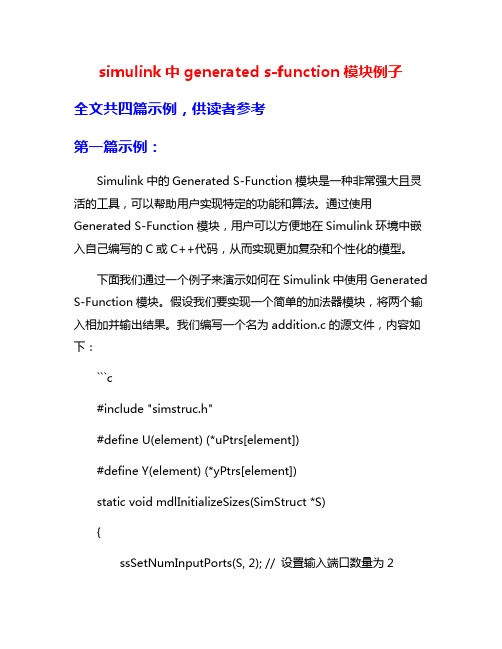
我们编写一个名为addition.c的源文件,内容如下:```c#include "simstruc.h"#define U(element) (*uPtrs[element])#define Y(element) (*yPtrs[element])static void mdlInitializeSizes(SimStruct *S){ssSetNumInputPorts(S, 2); // 设置输入端口数量为2ssSetNumOutputPorts(S, 1); // 设置输出端口数量为1ssSetInputPortWidth(S, 0, 1); // 设置第一个输入端口的宽度为1ssSetInputPortDataType(S, 0, SS_DOUBLE); // 设置第一个输入端口的数据类型为doublessSetInputPortWidth(S, 1, 1); // 设置第二个输入端口的宽度为1ssSetInputPortDataType(S, 1, SS_DOUBLE); // 设置第二个输入端口的数据类型为doublessSetOutputPortWidth(S, 0, 1); // 设置输出端口的宽度为1ssSetOutputPortDataType(S, 0, SS_DOUBLE); // 设置输出端口的数据类型为doublessSetNumSampleTimes(S, 1); // 设置采样时间为1ssSetOptions(S, 0); // 设置选项为0}static void mdlInitializeSampleTimes(SimStruct *S){ssSetSampleTime(S, 0, 0.1); // 设置第一个采样时间为0.1ssSetOffsetTime(S, 0, 0.0); // 设置第一个采样时间的偏移为0}static void mdlTerminate(SimStruct *S){// 清理工作}#ifdef MATLAB_MEX_FILE#include "simulink.c"#else#include "cg_sfun.h"#endif```在这个源文件中,我们首先定义了一个addition函数,用来实现两个输入相加的功能。
simulink matlab function模块中变量定义
Simulink MATLAB Function模块中变量定义引言Simulink是一种用于建模、仿真和分析动态系统的工具。
它提供了一个直观的图形界面,使得用户能够以块图的形式表示系统的不同组件和信号流动。
Simulink还允许用户使用MATLAB语言来定义复杂的系统行为和算法。
在Simulink中,MATLAB Function模块是一个强大的工具,用于在模型中定义自定义函数和变量。
什么是Simulink MATLAB Function模块?Simulink MATLAB Function模块是Simulink中的一个特殊模块,它允许用户在模型中使用MATLAB语言来定义自定义函数和变量。
通过使用MATLAB Function模块,用户可以轻松地将自己的MATLAB代码嵌入到Simulink模型中,并与其他模块进行交互。
这样,用户可以在Simulink模型中使用自定义函数和变量来实现复杂的算法和行为。
使用Simulink MATLAB Function模块定义变量在Simulink MATLAB Function模块中,用户可以使用MATLAB语言来定义变量。
变量是用于存储和操作数据的一种方式。
在Simulink模型中,变量可以用于传递数据、保存状态和参数等。
下面是在Simulink MATLAB Function模块中定义变量的几种常见方式:1. 使用输入和输出参数在Simulink MATLAB Function模块中,用户可以通过定义输入和输出参数来传递和返回数据。
输入参数用于接收来自其他模块的数据,而输出参数用于向其他模块发送数据。
通过使用输入和输出参数,用户可以在Simulink模型中定义和使用变量。
2. 使用持久变量持久变量是在函数调用之间保持其值的变量。
在Simulink MATLAB Function模块中,用户可以使用persistent关键字来定义持久变量。
持久变量在函数每次调用时保持其值,这样用户可以在多个函数调用之间共享和保存数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S-函数
• 实验时,有时发现一些过程用普通的Simu-link模块不易搭建,或者找不到相 应的模块。我们可以使用Simulink支持的S-函数格式,用Matlab语言或者C语言 写出描述过程的程序,构成S-函数模块,直接调用。 用Matlab语言编写S-函数
引导语句为:
S-函数
• 用C语言编写S-函数 可以用Matlab6.1中提供的S-函数编辑程序来设计C语言的S-函数模板 也可以用 sfundemos 命令打开S-function demos模块组进行设计
相关S-函数的详细内容可参考《S-函数编写指导》等相关资料
自定义Simulink模块库的添加
自定义Simulink模块库的添加
• 命令 which('slbloБайду номын сангаасks.m','-all') 找到slblocks.m 文件,复制到自定义模块库所在文件夹,编辑如下
保存,刷新Simulink Library Browser,就可以看到自己的模块库
•
Function[sys,x0,str,ts] = f(t,x,u,flag,p1,p2,· · · )
其中,p1,p2,· · · 是用户自定义的参数,t,x,u,flag等是固定参数。具体细节可参考《系统仿真 技术与应用》的6.3节 Simulink中提供了一个sfuntmpl.m的模板文件,可以从这个模板出发构建自己的S-函数,命 令 which('sfuntmpl.m','-all') 可以显示模板所在位置。