机器人避障问题的最短路径分析
机器人自主导航技术的路径规划和避障策略

机器人自主导航技术的路径规划和避障策略机器人自主导航是指机器人能够在无人干预的情况下,根据外部环境和自身感知信息,自主地决策和规划路径,以达到预定目标的能力。
路径规划和避障是机器人自主导航中两个重要的技术环节,下面将对这两个方面的技术进行全面的介绍和探讨。
路径规划是指机器人通过一系列算法和决策机制,在环境中找到一条最优或次优的路径,以达到目标点。
路径规划主要有两种方法,一种是基于图算法的方法,另一种是基于采样的方法。
基于图算法的路径规划方法主要有最短路径算法和搜索算法。
其中最常使用的最短路径算法是A*算法和Dijkstra算法。
A*算法是一种适用于有向图的寻路算法,通过综合考虑启发式评估函数和实际路程代价,能够在保证最佳路径的同时,有效地减少搜索空间。
Dijkstra算法则主要用于无向图的单源最短路径求解,通过不断更新路径的距离估计值,可以找到起点到各个顶点的最短路径。
这两种算法结合启发式评估函数等方法,可以在复杂的环境中高效地规划路径。
另一种基于采样的路径规划方法是通过对环境进行采样,然后利用采样数据进行路径搜索。
常见的算法有RRT算法和PRM算法。
RRT算法通过随机采样和迭代生成一棵树形结构,再根据目标点进行路径搜索。
PRM算法则是先进行采样,然后建立一个具有连接关系的节点集合,最后根据环境中的障碍物信息进行检查和优化。
这两种采样算法具有较强的鲁棒性和适应性,对于不确定的环境可以依然能够找到一条较为合适的路径。
除了路径规划,避障也是机器人导航中一个非常关键的环节。
机器人在移动过程中需要不断对周围环境进行感知,以避免碰撞和采取必要的规避动作。
避障主要有两种策略:基于传感器的避障和基于模型的避障。
基于传感器的避障策略是依靠机器人的传感器获取周围环境的信息,并基于这些信息做出避障决策。
常用的传感器有激光雷达、摄像头、超声波传感器等。
激光雷达可以通过扫描环境,获取障碍物的距离和形状信息,从而判断机器人行进的安全路径。
机器人路径规划与避障算法设计与实现

机器人路径规划与避障算法设计与实现随着人工智能技术的飞速发展,机器人在各个领域的应用越来越广泛。
机器人路径规划与避障是机器人导航和定位中的核心问题,对于机器人能否正常完成任务具有关键性的影响。
本文将介绍机器人路径规划与避障算法的设计与实现方法。
1. 问题描述机器人路径规划与避障是指在给定环境下,机器人需要找到从起点到目标点的最优路径,并且在路径上避开障碍物。
在实际应用中,机器人所处的环境通常是复杂且动态变化的,因此路径规划与避障算法需要具备高效、稳定、实时的特点。
2. 基本概念与方法2.1 基本概念在路径规划与避障中,需要明确几个基本概念:- 机器人自身状态:包括位置、朝向等参数,用于确定机器人当前所处的位置和姿态。
- 环境地图:用于描述机器人所处环境的信息,包括障碍物的位置、大小等。
- 目标点:机器人需要到达的目标位置。
2.2 基本方法路径规划与避障算法的基本方法可以分为离散方法与连续方法。
- 离散方法:将环境分割为离散的网格,采用搜索算法,如A*算法、Dijkstra算法等,通过遍历网格来搜索最优路径。
- 连续方法:将环境表示为连续的空间,采用优化算法,如启发式搜索算法、遗传算法等,通过优化目标函数来寻找最优路径。
3. 常见的路径规划与避障算法3.1 A*算法A*算法是一种经典的路径规划算法,它基于图搜索的思想,通过计算启发式函数来评估下一步移动的优先级。
A*算法综合考虑了路径长度和启发式函数的信息,能够找到最优路径。
3.2 Dijkstra算法Dijkstra算法也是一种常用的路径规划算法,它通过计算距离来选择下一步移动的优先级。
Dijkstra算法适用于无权图的路径规划,可以找到最短路径。
3.3 动态规划算法动态规划算法是一种优化计算的方法,可以求解具有重叠子问题性质的问题。
在路径规划与避障中,动态规划算法可以用来求解最优路径问题。
4. 避障算法设计与实现避障算法需要根据实际环境中的障碍物来确定机器人的行动策略。
给定场景下机器人避障行走的最短路径模型及求解
√ ( 7 3 + 0 7 p ) +
) 7 p ' — ( 7 — 3 +0 — 2 2 7 )+ — ( 1 8 一 8 p-6 0 )
: 、 6 2 9 2 9 p ( 9 1 2 6 2 +3 5 4 p ) ( I 1 0 2 5 8 p( 7 0 8 p 5 1 4 7 6 ¨
使 之更 好 地 服务 油 田开 发项 目 , 重 点关 心油 井 挤注 防 垢。油 田 进 入 中后 期 开发 后 , 含 水 率 不断 升 高 , 各种 结垢 问题 也将 日益 严重 , 井 下挤 注 防垢 技术 的应 用 势在 必 行 , 科 学合 理地 应用 油
井 挤注 防垢 技术 , 做 好应 尽 的准 备 工作 , 将 会 大 大提 高我 国油
所以: 最短 时 间路径为
m i n = 喜 厶,
用此模 型就 可 以对起 点到 目标 点之 间的路 径进行 优化 求解 。
4 3 给定场 景下 最短 路径模 型求 解
应 用 “拉 线 原 理 ” , 计 算 各 个 路 线 的 最 短 路 径 相 互 比 较 可 得 最 优 行 走 路 线 以 及 最 短 路 径 。 知 o ( o , 0 ) A ( 3 0 0 , 3 0 0 )的 最 优 行 走 路 线 为 O A A ,最
o ( o , 0 ) - - - ) A ( 3 0 0 , 3 0 0 ) B 00 0 , 7 0 0 ) C( 7 0 0 , 6 4 0 ) 的最优 行走 路
线为 D一 5 一 一 7 一 D8 一 一 一 9 一 9一 A1 0 一B t 0 一C 一0 , 最 短路径 L=3 0 4 2 . 8 0 2 2。
验 及应 用 。
模型缺陷 : 在 障碍 物 较 多 时 , 且形 状 不规 则 时 , 模型 需 要 0 一 A的最短路 径 o ( o , 0 ) C ( 7 0 0 , 6 4 0 ) 的 最 0一 B的最 短路 径 优 行 走 路 线 为 参 考 文献 [ 1 ] 机 器人 行走 问题. h t t p : / / w e n k u . b a i d u . c o m /
自主移动机器人路径规划与避障算法研究
自主移动机器人路径规划与避障算法研究随着科技的不断进步和智能机器人的快速发展,自主移动机器人已经成为现实生活中的重要组成部分。
而要实现机器人的自主移动,路径规划和避障算法是至关重要的研究方向之一。
本文将探讨自主移动机器人路径规划与避障算法的研究现状和发展趋势。
路径规划是指在给定的环境中,通过算法计算机器人从起始点到目标点的最优路径。
路径规划算法的目标是使得机器人能够以最短的时间或者最小的代价到达目标点,并且避免与障碍物发生碰撞。
常见的路径规划算法包括A*算法、Dijkstra算法和深度优先搜索等。
这些算法通过搜索算法和最优化方法来计算机器人应该采取的移动方向和行动序列,以达到目标。
在路径规划的过程中,机器人需要检测并避免与环境中的障碍物发生碰撞。
避障算法是指通过感知和决策,使机器人能够避开障碍物并选择一个安全的路径前进。
避障算法通常包括传感器数据采集、障碍物检测和路径调整等步骤。
常见的避障算法包括基于几何模型的避障算法、基于传感器数据的避障算法和基于人工智能的避障算法等。
近年来,随着深度学习和人工智能的飞速发展,机器人的路径规划和避障算法也得到了极大的改进。
传统的基于几何模型的避障算法在处理复杂环境中往往效果不佳,而基于深度学习的避障算法通过神经网络学习机器人与环境的交互信息,使得机器人能够更加智能地避开障碍物。
同时,在路径规划的领域,也出现了一些基于机器学习的新算法,例如强化学习和深度强化学习等,通过模仿学习和试错学习来优化机器人的路径选择。
然而,自主移动机器人路径规划与避障算法研究还存在着一些挑战和问题。
首先,复杂环境中机器人的路径规划和避障仍然存在一定的局限性,比如决策过程中的不确定性和难以预测的情况。
其次,现有的算法在处理动态环境和多机器人协同移动等问题上还有待改进。
此外,机器人的感知能力和决策能力也需要进一步提升,以适应更加复杂多变的现实场景。
为了解决这些问题,未来的研究可以集中在以下几个方面。
机器人避障问题

a = 、 厂 6 = 、 厂
, ,
E
c = 、 / r
如图 5 . 1 , 设A 。 , Y 。 ) 为起点, B 。 , y 2 ) 为 目标
点, 延长直线 O到. C D中点交圆弧 C D于 日 , 过 圆心 作O H 的垂线分别 交 A C 、 C D于 F 、 ,圆心 0 舢 c , , 和D , 为机器人经过拐点分别于 脱离危 险线 拐角 小 圆弧 的切 点 ,圆的半径 为 r ,
其 中P是转弯 半径. 若超过该速度 , 则机器人无法 完成行走 : ( 3 ) 机器人变速和转身瞬间完成. 3模型假设 ( 1 ) 机器人能够抽象成点来处理: c 2 ) 机器人的性能足够好, 能准确地沿圆弧转弯; ( 3 ) 机器人行走过程 中不会意外停止; ( 4 ) 机器人行走不小于最小转弯半径和最小安 全距 离 ; ( 5 ) 机器人不会进 入 两个相接触的障碍物的死角. 4 定义 与符 号说 明 r , P : 转弯半径 . , 啦 : 直线倾角或夹角. t : 时间. L : 最 短路 径 总长 . 5模 型 的建 立 查 阅相 关文 献 知 ,具有 圆形 限定 区域 的最短 路 径是由两部分组成的, 一部分是平面上的 自 然最短 路径 ( a P 直线段) ,另一部分是限定区域的部分边 界, 这两部分是相切 的, 这两条直线段是 由圆弧连 接的. 对于 问题 1 , 我们经过深入分析知, 起 点到 目标 点无论中间障碍物有 多少 , 最短路径都应该是若干 个线 圆结构所组成.在本题 中存在障碍物的状况 , 且障碍物在拐点处 的危 险区域 是一个半径为 r的 圆弧, 而求两点之间的最短路径 中的转弯半径我们 应该按照最小的转弯半径来算才能达到最优. 5 . 1基本线 圆结构的数学模型
本文研究了机器人避障的最短路径和最短时间问题

本文研究了机器人避障的最短路径和最短时间问题,主要研究了在一个区域内存在12个不同形状的障碍物,由出发点到达目标点避开障碍物的最短路径和最短时间两个问题。
首先,利用已学的数学知识证明了具有圆形限定区域的最短路径是由线圆结构组成的,并且机器人转弯时的圆弧是以障碍物的顶点为圆心,10个单位为半径的圆弧时,路径最短。
其次,对于途中需要多次转弯到达目标点的状况,适当扩大拐点处的转弯半径,使得机器人能够沿直线通过途中的目标点,从而减少转弯次数。
再次,我们针对问题一的四种路径给出了每种路径的所有可能的行走方案,然后运用绘图工具软件几何画板和matlab 等进行图示和运算,得出最短路径如下距离距离距离距离A O →B O →C O →OC B A O →→→→ 470.96853.551088.782756.03最后,在最短时间问题中,我们建立了所需时间t 关于转弯时圆弧的圆心坐标()y x ,和半径r 的一般模型,然后通过前面的猜想,分析出了从A O →的最短时间路径所经过的圆弧的圆心必然在正方形障碍5的对角线上,并且圆弧通过点)50210,5080(+-,然后运用MATLAB 软件,通过编程计算出了最短时间为94.2283。
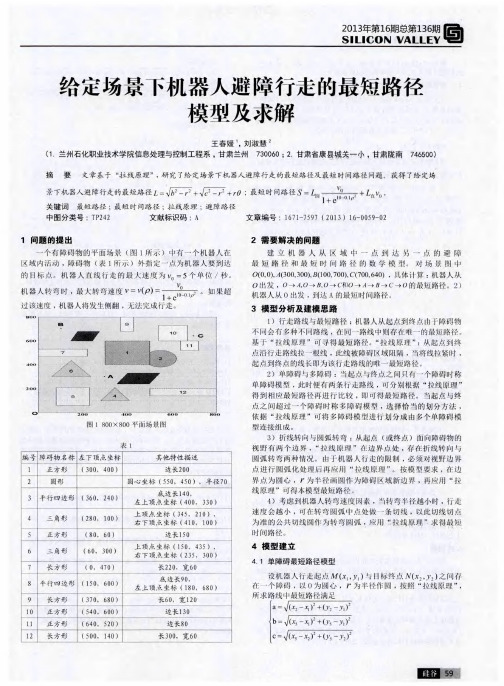
关键词:最短路径 最优化模型 最短时间 几何画板画图 MATLAB一、问题重述1.1 背景材料:在一个800×800的平面场景,在原点(0,0)点处有一个机器人,他只能在该平面场景内活动,图中12个不同形状的区域是机器人不能碰撞的障碍物,障碍物描述如下:编号障碍物名称左下顶点坐标其它特性描述1 正方形(300, 400) 边长2002 圆形圆心坐标(550, 450),半径703 平行四边形(360, 240) 底边长140,左上顶点坐标(400, 330)4 三角形(280, 100) 上顶点坐标(345, 210),右下顶点坐标(410, 100)5 正方形(80, 60) 边长1506 三角形(60, 300) 上顶点坐标(150, 435),右下顶点坐标(235, 300)7 长方形(0, 470) 长220,宽608 平行四边形(150, 600) 底边长90,左上顶点坐标(180, 680)9 长方形(370, 680) 长60,宽12010 正方形(540, 600) 边长13011 正方形(640, 520) 边长8012 长方形(500, 140) 长300,宽60图一800*800平面场景图1.2 问题提出:问题一:建立机器人从区域中一点到达另一点的避障最短路径和最短时间路径的数学模型。
机器人避障问题模型研究

2 模 型假 设
1 ) 假设绕过障碍物我们均走最小半径的圆弧 ; 2 ) 假设 机 器人 能够 抽象 成点 来处理 ;
3 ) 假 设不 考虑 弧度 计算 ;
圆相 切 , 切点 分别 为 E和 F, 当 Y趋 近 于 Y 时 , 显 然 A C B是这 种折 线 路 径 中最 短 的。 因 为 当 : 0< O t <
1 8
数
字
通
信
第4 0卷
与障碍 物 问的最 近距离 为 1 0个单 位 , 否则将 发 生碰 撞, 若碰 撞 发生 , 机 器 人则无 法完 成行 走 。 建立 机器人 从 区域 中一点 到达 另一 点 的避 障最 短路径 和 最短 时问路 径 的数 学模 型 。场 景 图 中有 4 个 目标 点 0( 0 , 0) , 4( 3 0 0 , 3 0 0 ) , B( 1 0 0 ,7 0 0 ) , C ( 7 0 0 , 6 4 0 ) 。具 体分 别计算 :机 器人 从 0( 0 , 0 ) 点
出发 , D 一4, D —B, D — C和 D —A —B —C — D 的最 短路 径及 长度 。
问题 : 证 明绳 子拉 紧时 的情况 , 则 为 2个 点 之 间
的最 短路 径 。 假设 在平 面 中有 A( a , 0 ) 和 曰(一a , 0 ) 2点 , 中
间有 1 个半圆形的障碍物 , 证 明从 到 B的最路径
分析 中的绳子拉到最紧时的情况 。
T A E F B是 满足 条件 A到 的最短 路径 。
第 6期
侯学 慧 : 机器人避 障问题模型研究
l 9
3 . 2 模型 准 备 1
所 以,
=2 一O t 一卢 一
机器人避障问题论文

D题机器人避障问题摘要本文综合运用分析法、图论方法、非线性规划方法,讨论了机器人避障最短路径和最短时间路径求解问题。
针对问题一,首先,通过分析,建立了靠近障碍物顶点处转弯得到的路径最短、转弯时圆弧的半径最小时和转弯圆弧的圆心为障碍物的顶点时路径最短、转弯在中间目标点附近时,中间目标点位于弧段中点有最短路径的三个原理,基于三个原理,其次对模型进行变换,对障碍物进行加工,扩充为符合条件的新的区域并在转弯处圆角化构成障碍图,并通过扩充的跨立实验,得到切线和圆弧是否在可避障区的算法,第三,计算起点、中间目标点和最终目标点和各圆弧及圆弧之间的所有可避障切线和圆弧路径,最后给这些定点赋一个等于切线长度或弧度的权值构成一个网络图,然后利用Dijkstra算法求出了O-A、O-B,O-C的最短路径为O-A:471.0372个单位,O-B:853.7001个单位,O-C:1086.0677个单位;对于需要经中间目标点的路径,可运用启发规则分别以相邻的目标点作为起点和终点计算,确定路径的大致情况,在进一步调整可得到O-A-B-C-O的最短路径为2748.699个单位。
针对问题二,主要研究的是由出发点到达目标点A点的最短时间路径,我们在第一问的基础上考虑路径尽可能短且圆弧转弯时的圆弧尽量靠近障碍物的顶点,即确定了圆弧半径最小时的圆弧内切于要确定的圆弧时存在最小时间路径,建立以总时间最短为目标函数,采用非线性规划模型通过Matlab编程求解出最短时间路径为最短时间路程为472.4822个单位,其中圆弧的圆心坐标为(81.430,209.41),最短时间为94.3332秒。
圆弧两切点的坐标分别为(70.88,212.92)、(77.66,219.87)。
关键字:Dijkstra算法跨立实验分析法非线性规划模型一.问题的重述图是一个800×800的平面场景图,在原点O(0, 0)点处有一个机器人,它只能在该平面场景范围内活动。
全国大学生数学建模竞赛国家一等奖论文D题——机器人避障问题

上顶点坐标(150, 435),右下顶点坐标(235, 300)
7 长方形
(0, 470)
长220,宽60
8 平行四边形 (150, 600)
底边长90,左上顶点坐标(180, 680)
9 长方形
(370, 680)
长60,宽120
10 正方形
(540, 600)
边长130
11 正方形
(640, 520)
机器人避障问题
摘要
针对机器人避障问题,本文分别建立了机器人从区域中一点到达另一点的避障的最 短路径、最短时间路径的非线性 0-1 整数规划模型。同时,本文为求带有 NP 属性的非 线性 0-1 整数规划模型,构建了有效启发式算法,利用 MATLAB 软件编程,求得了 O→A、 O→B、O→C、O→A→B→A→C 的最短路径,同时得到了 O→A 的最短时间路径,求得的各 类最短路径均是全局最优。
二、问题分析
2.1 求取最短路径的分析 本问题要求机器人从区域中一点到达另一点的避障最短路径。机器人只要做到转弯
时的圆弧半径最小为 10 个单位、与障碍物最近距离单时刻保持大于 10 个单位,那么可 行走的路径就有无数条,若想求得机器人从区域中一点到达另一点的避障最短路径,则 需要建立避障的最短路径模型,而建立避障的最短路径模型有一定难度。根据对问题的 分析,我们认为可以从简单做起,先确定小范围内最短路径条件,如圆弧位置的影响, 圆弧半径的大小,避免与障碍物碰撞条件等,通过确定最短路径条件来建立避障的最短 路径模型。对于最短路径的求取,我们可以通过确定穷举原则,利用穷举法来求解,当 然也可以通过构建启发式算法的进行求解。 2.2 最短时间路径的分析
边长80
12 长方形
(500, 140)
机器人避障问题

D题机器人避障问题摘要本文针对机器人的避障问题,建立了两个相应的数学模型。
模型一:针对机器人避障最短路径的问题。
研究了机器人从出发点到目标点,以及从出发点经过若干目标点最终回到出发点的两种情况。
首先,证明了具有圆形限定区域的最短路径是由限定区域的部分边界(部分圆弧)以及与之相切的直线段组成;其次,依据证明结果,最短路径一定是由线和圆弧组成,以线圆结构建立了最短路径与时间的通用优化模型,解决了无论路径多么复杂都可以将路径划分为若干个这种线圆结构来求解的问题;再次,对于途中经过若干目标点最终再回到出发点的问题,采用在拐点和节点都用最小转弯半径的的方案进行计算;最后,对机器人所走最短路径可能性较大的几条路径进行分割,再用通用优化模型进行求解,得到机器人行走的最短路径如下:路径总距离(单位)总时间(秒)→ 471.0372 96.0176O A→853.7001 179.5340O B→1095.1 224.7865O C→→→→2762.5 581.4193 O A B C O模型二:针对机器人避障最短时间路径的问题。
研究了行走总时间(即机器人走直线和圆弧所用的时间之和)会随转弯圆弧的圆心和半径的变动而改变的情况。
首先,分析在半径一定、圆心在直线OE上运动的情况,得到半径一定时的最短时间路径的最优方案;然后,以转弯圆弧过E点为条件,通过调整半径的大小,得出最短时间路径的最优方案;最后,以以上两种方案为依据,得到O A→的最短时间路径为:圆心为(82,208),T=(秒)。
12.828r=(单位),94.2284本文还对模型做了进一步的推广,对于智能设备的研究有较高的参考价值。
关键词:最短路径最短时间路径线圆结构最优化模型1问题重述1.1 背景资料(1)图1(见附录B )在原点O(0,0)处有一个机器人,它只能在一个800×800的平面场景范围内活动。
而图中有12个不同形状的区域是机器人不能与之发生碰撞的障碍物,其障碍物的数学描述如表(见附录A )。
2012高教社杯数模竞赛D题——机器人避障问题

机器人避障问题摘要本文研究了在已知区域障碍物分布的情况下,机器人从起点到目标点避障最短路径或最短时间路径的问题,路径必须是由圆弧和与之相切的直线段组成的线圆结构。
一开始先对模型预处理,将所有障碍物外扩10个单位长度,划定危险区域,得到障碍扩展图。
针对问题一,经过分析论证,无论起点到目标点间危险区域有多少,最短路径都应该是紧绕危险点的切线圆路径,且可根据需依次绕过的危险点情况划分为N条子路径(见图5.1.2)求解,圆弧段取允许最小转弯半径。
模型求解分两步走:一、将实际障碍图转化为加权可视图,利用Dijstra算法搜索出在可视图下的最短路径,主要是找到必须绕过的若干危险点。
二、根据障碍扩展图将可视图中的路径修正为实际情况下的切线圆路径,求出最终结果。
在求解过程中运用MATLAB数学软件给出路径中每段直线段或圆弧的起点和终点坐标、圆弧的圆心连接两条切线,使机器人总的行走时间最短。
而圆弧可以有圆心坐标和半径唯一确定。
由此构建机器人行走总时间的目标函数,将机器人不与障碍物碰撞作为约束条件,将该问题转变为一个非线性规划问题,借助matlab求得最优解为:T=94.3314s。
关键词:路径规划最优化模型切线圆路径 Dijstra算法非线性规划matlab求解一、问题重述图1是一个800×800的平面场景图,在原点O(0,0)点处有一个机器人,它只能在该平面场景范围内活动。
图中有12个不同形状的区域是机器人不能与之发生碰标点与障碍物的距离至少超过10个单位)。
规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。
机器人不能折线转弯,转弯路径由与直线路径相切的一段圆弧组成,也可以由两个或多个相切的圆弧路径组成,但每个圆弧的半径最小为10个单位。
为了不与障碍物发生碰撞,同时要求机器人行走线路与障碍物间的最近距离为10个单位,否则将发生碰撞,若碰撞发生,则机器人无法完成行走。
机器人直线行走的最大速度为50=v 个单位/秒。
机器人路径规划与避障算法设计

机器人路径规划与避障算法设计随着人工智能技术的不断发展,机器人在日常生活、工业生产等领域的应用越来越广泛。
机器人的路径规划与避障算法设计是机器人导航和避障能力的关键,对机器人的性能和安全性有着重要影响。
本文将介绍机器人路径规划和避障算法的基本概念和设计方法,并探讨其在实际应用中的一些关键问题。
1. 机器人路径规划的基本概念机器人路径规划是指在已知环境中确定机器人从起点到目标位置的路径。
机器人路径规划可以分为全局路径规划和局部路径规划两个阶段。
全局路径规划是在静态地图中进行的,目标是找到机器人从起点到目标位置的最优路径。
而局部路径规划是在动态环境中进行的,主要用来调整机器人在当前位置附近的移动。
2. 机器人路径规划的方法机器人路径规划的方法可以分为基于搜索的方法和基于优化的方法两大类。
基于搜索的方法主要有A*算法、Dijkstra算法和广度优先搜索算法等。
这些算法通过遍历地图搜索最短路径,可以有效地解决机器人在静态环境中的路径规划问题。
而基于优化的方法则是通过建立数学模型和优化算法,来寻找机器人的最优路径。
其中最著名的方法是动态规划和贪心算法。
3. 机器人避障算法的基本概念机器人避障算法是指在未知或动态环境中,根据机器人传感器获取的信息来规避障碍物,以保证机器人的安全运行。
机器人避障算法可以分为基于机器人模型和基于传感器的方法两大类。
基于机器人模型的方法通过构建机器人的碰撞模型和环境模型,来判断机器人与障碍物之间的关系,并进行路径规划。
而基于传感器的方法则是通过机器人的传感器获取障碍物信息,以决策机器人的移动方向。
4. 机器人避障算法的方法机器人避障算法的方法可以分为静态避障和动态避障两类。
静态避障是指处理静止障碍物,如墙壁、家具等。
常用的方法有基于几何模型的避障算法和基于图像处理的避障算法。
动态避障是指处理运动障碍物,如人、其他机器人等。
常用的方法有基于激光雷达的避障算法和基于视觉跟踪的避障算法。
机器人导航中的路径规划算法使用教程

机器人导航中的路径规划算法使用教程路径规划是机器人导航中一个重要的问题,通过合理的路径规划算法,机器人能够有效地避开障碍物,以最短的路径达到目标点。
本文将介绍几种常用的路径规划算法,并提供相应的使用教程。
一、最短路径算法最短路径算法旨在寻找机器人从起点到目标点的最短路径。
其中最经典的算法是Dijkstra算法和A*算法。
1. Dijkstra算法Dijkstra算法是一种广度优先搜索的算法,通过确定当前离起点最近的顶点,并将它添加到最短路径集合中,不断更新其他顶点的最短路径。
具体步骤如下:1) 初始化距离数组dist[],将起点到所有其他顶点的距离设置为无穷大,起点的距离设置为0。
2) 对于每个顶点,选择从起点到该顶点距离最短的顶点,并将其加入到最短路径集合中。
3) 遍历该顶点的邻接顶点,更新距离数组dist[],如果从起点到某个邻接顶点的路径距离更短,则更新该路径长度。
4) 重复步骤2和3,直到所有顶点都被加入到最短路径集合中。
2. A*算法A*算法是在Dijkstra算法基础上进行改进的算法,它在选择下一个顶点时考虑了目标点的信息。
具体步骤如下:1) 初始化距离数组dist[]和启发函数数组heur[],将起点到所有其他顶点的距离设置为无穷大,启发函数值设置为从当前顶点到目标点的估计距离。
2) 将起点加入到Open集合中。
3) 若Open集合为空,则路径不存在;否则,选择Open集合中F值最小的顶点作为当前顶点。
4) 若当前顶点是目标点,则搜索结束;否则,遍历当前顶点的邻接顶点,更新距离数组dist[]和启发函数数组heur[]。
5) 重复步骤3和4。
二、避障算法避障算法旨在寻找机器人绕过障碍物的最短路径。
其中最常见的避障算法是基于代价地图的D*算法和RRT*算法。
1. D*算法D*算法是一种增量搜索算法,通过动态更新代价地图来实现路径规划。
具体步骤如下:1) 初始化起点和目标点。
2) 根据当前代价地图,计算最短路径。
机器人避障问题的分析与计算

弧与切线 G 2 日 。 , , 。 的切点; , 。 , , 2 , , 3 分别表示7 号障碍物右上顶点处圆弧与切线 , 。 , , 2 . , , , 3 的切点;
‘ , , 分 别表 示 8 号 障碍物 左下 顶点 处 圆弧 与切 线 , 2 l , , B的切点 ; , £ : , , 分别 表示 8 号 障碍物 右上 方顶 点 处 圆弧 与切 线 K 3 , £ : , E , 的切 点.
摘
要: 本文针对机器人从 区域 中一 点 O到达另一点 曰的避 障最短 路径 问题 展开 了设 计 、 计算 和分析.
根据出发点 、 目标点 以及 障碍 物的位置关系 , 设计 出了从 0一 B可能的路径 , 其 中转弯处 圆弧 的半径 均
采用最小转弯圆心 为所避 障碍物 的某一顶 点 , 其 他处用 直线行 走. 利
山西师范大学学报 ( 自然科学 版)
第2 7卷第 3期 2 0 1 3年 9月
J o u r n a l o f S h a n x i No r ma l Un i v e r s i t y
Na t u r a l S c i e n c e E d i t i o n
在原 点 O( 0 , 0 )处有 一个 机器 人 , 它只 能在该 平 面场景 范 围 内活动 ( 图1 ) . 图 1中有 8个 不 同形 状 的
区域是机器人不能与之发生碰撞 的障碍物 , 障碍物的数学描述如表 1 . 在 平 面场景 中 , 障碍 物处 ( 1 0 0, 7 0 0 )点 为机器 人要 到 达 的 目标点 ( 要 求 目标 点 与 障碍 物 的距 离 至少 超过 1 O个单位) 。 规定机器人的行走路径 由直线段和圆弧组成 , 其中圆弧是机器人转弯路径 , 机器人不能
基于Dijkstra算法的机器人避障最短线路模型
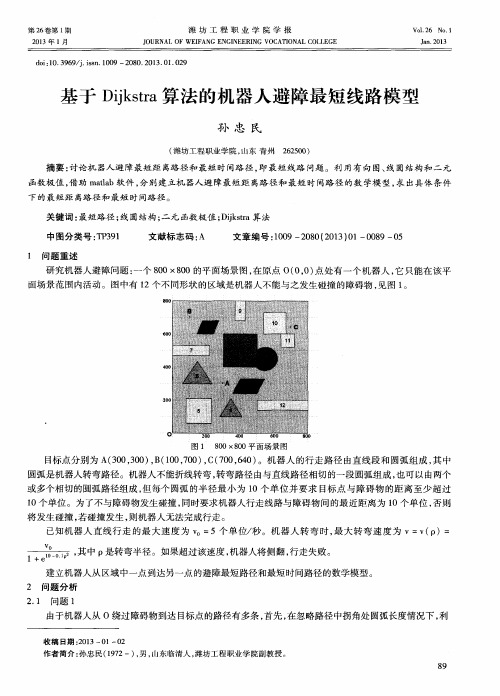
或 多个 相切 的圆弧路 径 组成 , 但 每个 圆弧 的半 径 最 小 为 l 0个 单 位并 要求 目标 点 与 障碍 物 的距 离 至少 超 过
1 O 个单位 。为了不与障碍物发生碰撞 , 同时要求机器人行走线路与障碍物间的最近距离为 l O 个单位 , 否则
将 发 生碰撞 , 若 碰撞 发 生 , 则 机器 人无 法完 成行 走 。 已知机 器 人 直 线 行 走 的最 大 速 度 为 v 。=5个 单 位/ 秒 。机 器 人 转 弯 时 , 最 大 转 弯 速 度 为 v=v ( P )= ■- _ 二
2 . 2 问题 2
利用 问题 1求 出的 O — A 的最 短距 离路径 , 由于转 弯速度 与 圆弧半径 有关 , 转弯 半径 越 大转 弯处 的速度 越快 , 在半 径 1 0的基 础上 适 当扩大 拐点处 的转 弯半径 , 可 使从 0到 A的行走 时间 最短 。 由于机 器人 到 障 碍
1 1- C
, 其中 p 是 转 弯半径 。如果超 过 该速 度 , 机器 人将 侧 翻 , 行 走失 败 。
建立机器人从区域 中一点到达另一点 的避障最短路径和最短时间路径的数学模型。
2 问题 分 析 2 . 1 问题 1
由于机器人从 O绕过 障碍物到达 目 标点的路径有多条 , 首先 , 在忽略路径 中拐角处圆弧长度情况下 , 利
机器人避障中最短路径的算法研究及应用
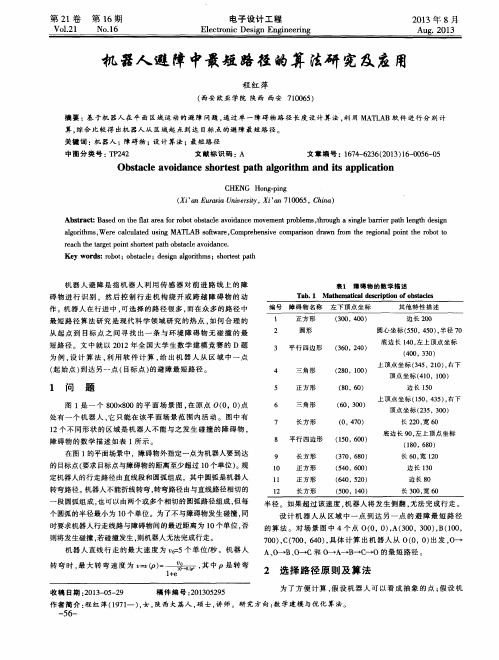
摘 要 :基 于 机 器 人 在 平 面 区域 运 动 的避 障 问题 , 通 过 单 一 障 碍 物 路 径 长度 设 计 算 法 , 利 用 MA T L A B软 件 进行 分 别 计
算, 综 合 比较 得 出机 器人 从 区域 起 点 到 达 目标 点 的避 障 最短 路 径 。 关键词 : 机 器人 ;障 碍 物 ;设 计 算 法 ; 最 短 路 径
Ta b .1 Ma t h e ma t i c a l d e s c r i p t i o n o f o b s t a c l e s
最短 路 径 算 法 研 究 是 现 代 科 学 领 域 研 究 的热 点 , 如 何 合 理 的 从 起 点 到 目标 点 之 间 寻 找 出一 条 与 环 境 障 碍 物 无 碰 撞 的 最
7 0 0 ) , C ( 7 0 0, 6 4 0 ) , 具 体 计 算 出 机 器 人 从 0( 0 , 0 ) 出发 , 0 一
A、 O —B 、 0 _ + C和 O —A —B —C 一 0的 最 短 路 径 。
转弯时, 最大转弯速度为 = 口 ( p )
收 稿 日期 : 2 0 1 3 — 0 5 — 2 9
5 6 -
, 其中P 是转弯 2 选 择 路径 原 则 及 算 法
为 了方 便 计 算 , 假设机 器人可 以看成抽 象 的点 ; 假 设 机
稿 件编 号 : 2 0 1 3 0 5 2 9 5
研 究方向: 数 学 建模 与优 化 算 法 。 作者简介 : 程红萍( 1 9 7 1 一) , 女, 陕 西 大荔 人 , 硕 士, 讲师。
2012年数学建模C题,机器人避障

机器人障碍问题摘要本文研究了有若干障碍物的平面场景中,机器人避障行走的最短路径以及最短时间路径的问题。
针对问题一,首先给出简单证明了两个对称点绕过圆形障碍物的最短路径为两条与圆形障碍物相切的直线,加上两切点间的劣弧。
然后分了四种情况,分别给出了不同直线与圆相切时,根据各已知点坐标,求相应切点、直行路径及劣弧长度的方法。
然后在满足机器人从定点(0,0)O出发绕过障碍物,距离障碍物至少超过10个单位,不能折线转弯绕过障碍物的条件下,以前面的证明为依据,将机器人行走路径设计为由直线和圆弧组成。
针对不同的起点和终点,将总路径分解为上述四种情况,利用MATLAB6.5.1,分别求出相应的切点及各转弯圆的劣弧长,最后比较得到相对较短的行走路径。
并根据机器人在不同路径上的速度的不同,求出避障前进的最短路径时所需要的行走时间。
具体如下:→的最短路径为471.0375个单位,所需的时间为96.0177秒O A→的最短路径为812.7029个单位,所需的时间为170.5132秒O B→的最短路径为:1090.8个单位,所需的时间为222.9373秒O C→→→→的最短路径为:3137.8个单位,所需的时间为652秒。
O A B C O针对问题二,要求求出机器人从(0,0)O出发,到达A的最短时间路径。
因为机器人行走路径为直线时的速度为定值,弧线行走的速度与弧所在的圆半径有关,由此得到行走时间与圆弧半径ρ的关系式,利用高等数学的极值定理条件,估算出ρ=11.5052个单位时从O A→所需时间最短,为95.1328秒。
该模型简单、便于理解,理论性较强。
另外图形的使用,使问题更加清晰。
该模型还可用于求解设计最优路线问题。
关键词最短路径圆弧半径最短时间切点一 问题重述在一个800×800的平面场景图,在原点O(0, 0)点处有一个机器人,它只能在该平面场景范围内活动。
平面场景中有12个不同形状的区域是机器人不能与之发生碰撞的障碍物。
机器人最短路径最小时间路径分析

7 8
9 1 0 1 1
长方形 平 行四边形
长 方形 正 方形 正 方形
( 0 , 4 7 0 ) ( 1 5 o , 6 0 0 )
( 3 7 0 , 6 8 0 ) ( 5 4 0 , 6 0 0 ) ( 6 4 0 , 5 2 0 )
长2 2 0 ,宽6 O 底边长9 0 ,左上顶点坐标( 1 8 0 , 6 8 0 )
步 骤 l 赋 初 值 令 S= 。 ) , , ( “ 。 ) =0 , v ∈ =V - S ,令 , ( v ) = W ( u o , v ) , z ( 1 , ) = U o ,U 4 - 。 步骤 2 更新 , ( V ) , z ( V ): V v ∈ S = V — S, 若
长6 0 ,宽1 2 0 边 长1 3 0 边长8 0
1 2
长 方形
( 5 0 0 , 1 4 0 )
长3 0 0 ,宽6 0
收稿日舅:2 0 1 2 -1 2 -1 9 作者简介:郑 文 ( 1 9 6 6 一 ),男,重庆长寿人 ,副教授 ,硕士,主要从事数学建模的教学与研究 。 [ 1 4 2 ] 第3 5 卷 第2 期 2 0 1 3 - 0 2 ( 下)
至 少超 过 1 0 个 单 位 ) 。规 定 机 器 人 的 行 走 路径 由
秒 。 机 器 人 转 弯 时 , 最 大 转 弯 速 度 为
v =1 , ( ) =— ,其 中 是 转弯 半径 。如 果超
直 线 段 和 圆 弧 组 成 ,其 中 圆 弧 是 机 器 人 转 弯 路
表1 障碍物 的形状与位置
务l 匐 化
机器人最短 路径最小时 间路径分析
Anal y si s on r ob ot ’ S s hor t es t pat h and mi 。 ni 。 m um t i me pat h
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人避障问题的最短路径分析摘要本论文研究了机器人避障最短路径和最短时间路径的问题。
主要讨论了在一个区域中存在12个障碍物,由出发点到达目标点以及由出发点经过若干目标点最终到达出发点的两种情况。
采用传统的避障方法——切线图法。
建立了线圆结构,这样任何路径,我们都可以将路径划分为若干个这种线圆结构来求解。
对于途中经过节点再到达目标点的状况,我们采用在转弯点和节点都采用最小转弯半径,以节点为切点的形式。
然后建立了最优化模型,利用MATLAB软件对方案进行求解。
问题一:把路径分解成若干个线圆结构来求解,然后把可能的最短路径采用穷举法列举出来,最终得出最短路径:AO→最短路径为:471.0O→最短路径为:869.5BO→最短路径为:1093.3C对于O→→→我们将A、B、C看作切点,同样采用线圆结构CBAO→计算。
O→→→→最短路径为:2827.1AOCB问题二:考虑避障路径和转弯速度,我们建立时间与路径之间的模型,用MATLAB软件求出最优解。
当转弯半径为11.5的时候,可以得出最短时间为:T=94.3关键词最优化模型避障路径线圆结构切线图法一、问题重述本文是求一个机器人在800×800的平面场景图中避开障碍物,建立从原点O(0, 0)点处出发达到终点的最短路径和最短时间路径的模型。
即求:1、O→A 、O→B 、O→C 和O→A→B→C→O 的最短路径。
2、O →A 的最短时间路径。
机器人在行走时的要求是:1、它只能在该平面场景范围内活动2、图中有12个不同形状的区域是机器人不能与之发生碰撞的障碍物(障碍物的分布如图1)3、障碍物外指定一点为机器人要到达的目标点(要求目标点与障碍物的距离至少超过10个单位)。
4、规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。
机器人不能折线转弯,转弯路径由与直线路径相切的一段圆弧组成,也可以由两个或多个相切的圆弧路径组成,但每个圆弧的半径最小为10个单位。
5、为了不与障碍物发生碰撞,同时要求机器人行走线路与障碍物间的最近距离为10个单位,否则将发生碰撞。
机器人直线行走的最大速度为50=v 个单位/秒。
机器人转弯时,最大转弯速度为21.0100e1)(ρρ-+==v v v ,其中ρ是转弯半径。
已知场景图中4个点O(0, 0),A(300, 300),B(100, 700),C(700, 640)。
图中各个点 的坐标见下表。
图1编号 障碍物名称 左下顶点坐标 其它特性描述 1 正方形 (300, 400) 边长200 2 圆形 圆心坐标(550, 450),半径70 3 平行四边形 (360, 240) 底边长140,左上顶点坐标(400, 330)4 三角形 (280, 100) 上顶点坐标(345, 210),右下顶点坐标(410, 100)5 正方形 (80, 60) 边长1506 三角形 (60, 300) 上顶点坐标(150, 435),右下顶点坐标(235, 300)7 长方形 (0, 470) 长220,宽608 平行四边形 (150, 600) 底边长90,左上顶点坐标(180, 680) 9 长方形 (370, 680) 长60,宽120 10 正方形 (540, 600) 边长130 11 正方形 (640, 520) 边长8012长方形 (500, 140) 长300,宽60二、模型假设1、把机器人抽象成质点。
2、机器人直线行走都是以最大速度做匀速运动。
3、机器人转弯时同样以最大允许速度做匀速运动。
三、符号说明符号符号说明i a 每一个线圆结构起点到终点的长度i b 每一个线圆结构起点到圆心的长度 i c每一个线圆结构终点到圆心的长度r转弯半径(即题上的ρ)i θ转弯圆心角 )y ,x (O i i i转弯圆心坐标 A 到Z )y ,x (i i 各个切点,节点的坐标 i l每个弧长的长度L i第i 段直线段的长度 K j 第j 段圆弧的长度 t i第i 段直线段所用的时间 p j 第j 段圆弧所用的时间d 障碍物上的任意点与行走路径之间的最短距离四、模型分析与准备一、最短路径和最短时间路径的分析(1)问题一:要求从)0,0(O 出发,沿A O →,B O →,CO →和O C B A O →→→→的行走路线按照一定规则,绕过障碍物到达目标点的最短路径。
在求A O →,B O →,C O →时。
我们将所有的障碍物扩大10个单位,在障碍物的顶点处,就是以10为半径圆弧。
我们采用拉绳子的方法寻找所有可能的最短路径。
然后利用线圆结构的方式求解。
即列举法。
(例如求解O 到A 的最短路径,我们就可以连接O 和A 之间的一段绳子,以障碍5左上角的拐角处的圆弧为支撑拉紧,那么这段绳子的长度便是O 到A 的一条可能的最短路径)。
在求O C B A O →→→→时,在过点A 、B 、C 处我们采用最小半转弯的方式,使机器人经过这些过点时,都是按圆弧通过。
其他情况就是按线圆结构的方式进行求解。
(2)问题二、要求从O 点出发到达A 点的最短时间路径问题,采用穷举法和CAD 画图可以得出最短时间路径。
二、在模型的建立中会大量用到线圆结构来计算,证明起点到终点之间最短的路径就是我们所用的线圆结构。
证明:如图所示的线圆结构CA ,OB 和圆弧BC 之和为最短避障路径。
假设在平面中有)0,a (A 和)0,b (O 两点,中间有一个半圆形的障碍物,证明从O 到B 的最路径为圆弧BC 和线段OB 、AC 的和。
图2平面上连接两点最短的路径是通过这两点的直线段,但是连接两点的线段被障碍物遮挡,所以设法尝试绕过障碍物的折线路径。
在y 轴上取一点)y ,0(P ,若y 适当大,当折线OPA 与障碍物相切时,OPA 是这种折线路径中最短的。
由于满足2/0π<θ<的角满足θ<θtan ,所以易知弧度BC 小于BPC 的长,即证明到了线圆结构为最短避障路径。
线圆结构的长度:设r CD =,)y ,x (O 11 为起始点,)y ,x (A 22为目标点,)y ,x (D 33。
求O B C ~~A ,设为L 。
a AO = 2211))22((a =+x x y y -- b OD = 2211))33((b =+x x y y --c AD = ()()y y x x c 232322--+=α=∠ADO)bc2ac b arccos(222-+=α β=∠CDO :)a r c c o s (br=βγ=∠BDA :)cra r c c o s (=γ因为θ=∠BDC 所以:γ+θ+α+β=π2从而可得: 2222L =-+-+r*s b c r r六、模型的建立与求解假设机器人从起点R 到到目标点0M ,由图2知路径一定是由圆弧和线段组成,设有m 条线段,n 条圆弧。
那么最短路程:11min mni j i j S L l ===+∑∑1010.r d s t ≥⎧⎨≥⎩=用此模型就可以对起点到目标点之间的路径进行优化求解。
时间模型:∑∑==+=nj jm i i pt T 11min1010.ii ojj r L t v l p v d s t ≥⎧⎪⎪=⎪⎨⎪=⎪⎪≥⎩=问题一:1、由以上模型采用穷举法知从A O →的路径线路通过简化有如下两种情况,分别为,如图3:已知O(0,0),D(80,210),A(300,300)图3用MATLAB 软件算得:O →A 的路径为:471.0372 所以:O →A 的最短路径为图3其结果为:471.03722、通过穷举法分析知采用如下图6所示路线可以可以算出O →B 的长度。
设D 到M 点的坐标分别为(,i i x y )i= 1...10;Q1到Q5表示为绕过的各个障碍物的圆心设坐标为(y ,x j1j1)j=11...15;n jk 表示各直线相交的夹角; )y ,x (p 1616 )y ,x (B 1717 )y ,x (q 1818类似的采用以上的算法可以得到如下直线的长度: F a 1= J b 1= F G c -=1 E p a 2-=E Q b-=22P Q c-=22J P a 3-= J Q b -=33 P Q c-=33q I a-=4I Q b-=44q Q c -=44q B a 5-= q Q 55b -=B Q c-=55图6则:夹角为222+-bj cj aj =arccos()n j12bjcjr=arccos()n j2bjr=arccos()n j3cjπ24321=+++n n nn j j j j所以O →B 所走路线的,弧线长度为:r n Lj j4=每个线圆结构起点到终点,起点到圆心,圆心到终点的距离: L r c r b s j j j j +-+-=2222 (j=1,2,3,4,5)故,O →B 的最短路径的目标函数为:5minZ =s j j =1∑通过软件计算知 :B O →的最短路径是869.43323、在通过分析知O →C 的最短路径为图5所示,通过visio 画图得到如下图所示:设()y x jjiO ,其中j 为1到4的整数,1717O ,)(xy 。
A.B.J.I.D.K.E.F.G.H的坐标分别为(y x ii ,)其中i 为5到14的整数,M(y x 1616,).各个点之间的关系:J 点坐标22217217yy yxx x +=+= K 点坐标2232103210yy yxx x +=+=G 点坐标 yyx x r 413413=+= F 点坐标yy x x r =+=312312 我们将O 到C 分成五个线圆结构,根据上述模型分析可以得到:A O →:52255r r b L θ+-=Q M →:111r r 2c 2L θ⨯+-=K Q →:2222r r 2c 2r 2b 2L θ⨯+-+-= G K →:3333r r 2c 2r 2b 2L θ⨯+-+-= C F →:444r r 2c 2L θ⨯+-=所以:54321L L L L L L min ++++=所以通过MATIAB 软件编程可以算出:O →C 的最短路径为:1093.301图54、通过分析可知O →A →B →C →O 的最短路径为如下图7所示:图7因为O →A →B →C →O 的路线简化成由16个线圆结构组成的H G →: θ12212211r r c r b l +-+-=F →L :θ22222r C r l +-= L →B :θ32232233r r c r b l +-+-=K →N :θ42244r r c l +-= M →Q :θ52255r r c l +-=Q →t :θ62262266r r c r b l +-+-=S →V :θ72277r r c l +-=V →Y :θ82282288r r c r b l +-+-=X →T :92299θr r c l +-= T →q :θ10221010r r c l +-=为了简化模型,我们假设A 、B 、C 点为切点。