自动化机构设计基础
SSQ FA工业自动化设备设计基础

Automation that transformsFA工业自动化设备设计基础2022-MAY-1学习的本质–库博经验学习圈经验学习的起点非经验学习的起点大部分我们所谓的经验都只是具体经验,而且其中大部分是不全面的!所以作为工程师来说,更不应该只依赖于具体经验,只有不停的循环,才能积累经验,才能更好的指导我们的工作。
理论实践1.绪论–设备的结构与分类2.设备整体设计的思路和方法2.1 设备设计的一般过程2.2 生产线的布局方式2.3 工位设计的一般步骤2.4 一些模块的实现方法2.5 FMEA –故障模式及失效分析3 自动化部件机构设计基础3.1 零件的工艺性3.2 气动部件设计4 常见的术语 4.1 CYCLE TIME4.2 TA –TECHNICAL AVAILABILITY 技术可用性4.3 OEE –OVERALL EQUIPMENT EFFICIENCY 设备综合效率4.4 CPK –PROCESS CAPABILITY INDEX 过程能力指数4.5 CMK –MACHINE CAPABILITY INDEX 临界机器能力指数目录1 绪论工厂自动化(Factory Automation,简称FA),指自动完成产品制造的全部或部分加工过程。
这里提到的自动化设备主要是大量使用了现代自动化元器件以及自动化控制系统的各类设备,与传统的纯机械结构组成的设备有一定的区别。
但是,作为工程师,不能盲目的崇拜自动化元器件及现代控制技术的能力,要充分认识到,传统的机械结构仍然是机械的重要组成部分。
传统的机械结构设计具有非常明显的简洁、高效的优点。
在设备设计过程中,只有合理地运用组合机械机构、现代自动化元器件和自动化控制系统才能设计出色的自动化设备。
由于机械结构学在18世纪就已经发展成熟,所以推荐大家要对大学课程《机械原理》《机械设计》进行复习,要将其作为桌子上的常用书。
《机械原理》《机械设计》是一切设备设计的理论基础,不能忽视。
机械设计制造及其自动化 考试大纲

“机械设计基础”考试大纲适用:20xx年金陵科技学院五年一贯制高职“专转本”考试专业名称:机械设计制造及其自动化专业考试科目:专业课一、机械设计概述1、考试内容机器的组成及特征;机器应满足的基本要求;机械设计的一般过程和主要内容;2、考试要求掌握机器的组成及特征;了解机械设计的一般过程和主要内容;二、平面机构的结构分析1.考试内容有关机构组成中的构件、运动副、运动链及机构等概念;机构具有确定运动的条件,机构运动简图的绘制和平面机构自由度的计算;2.考试要求(1)掌握组成机构的零件、构件、运动副及机构的基本概念和联系。
掌握运动副的常用类型及特点;(2)熟练掌握机构运动简图的绘制方法,能够将实际机构或机构的结构图绘制成机构运动简图;能看懂各种复杂机构的机构运动简图;掌握常用机构构件和运动副的符号及机构运动简图的绘制方法;(3)熟练掌握机构自由度的意义和机构具有确定运动的条件;掌握平面机构自由度的计算公式,并正确识别出机构中存在的复合铰链、局部自由度和虚约束,并做出正确处理;三、平面连杆机构1.考试内容平面四杆机构的基本特性及其演化;铰链四杆机构的曲柄存在条件;四杆机构的设计。
2.考试要求(1)掌握平面四杆机构的基本型式、特点及其演化方法;(2)掌握平面四杆机构的压力角、传动角、急回运动、极位夹角、行程速比系数等基本概念;掌握连杆机构最小传动角出现的位置及计算方法;掌握极位夹角与行程速比系数的关系式;掌握死点在什么情况下出现及死点位置在机构中的应用;(3)熟练掌握铰链四杆机构的曲柄存在条件,灵活运用并判断铰链四杆机构的类型;(4)掌握平面四杆机构的运动特征及其设计的基本问题;掌握按给定行程速比系数、给定连杆位置、给定连架杆对应位置设计四杆机构的方法;四、凸轮机构1、考试内容常用的从动件运动规律;盘形凸轮轮廓的设计与加工方法;凸轮机构基本尺寸的确定2、考试要求(1)了解常用的从动件运动规律;(2)了解按给定运动规律设计凸轮轮廓曲线;五、间歇运动机构1、考试内容棘轮机构的工作原理、特点及作用;槽轮机构的工作原理、特点及作用。
自动化设备机械技术标准
自动化设备机械技术标准(试行)为了在尔后设备前期治理进程中,增强非标设备的质量操纵工作,改善设备初期状态,确保设备在生产服役进程中有良好的开动率,特制定本标准。
希望参与前期治理的技术人员参照执行,使技术要求更全面、准确、周密。
一、技术要求(一)、结构要求1.机械机构设计需符合人机工程学,方便人员操作与维修;2.机械结构设计需通过计算,达到正常利用的强度要求,并在平安余量之内;3.机械结构设计需依照我方具体要求,对关键点进行FEMA分析和验证;4.机械结构整体设计需考虑经济、环保、平安的原那么。
(二)、材料要求1.结构件、面板类钢材要求Q235,传动件、一样零部件材料要求45#、需热处置部件材料要求20-40Cr或指定其他材料,各类型材必需是国标型材,特殊要求依照设备设计需求具体提出来;2.所有材料必需有相应的合格证或符合质量要求的查验证书;3.关于特殊部件的材料,需同时提供检测报告,报告内容要紧涉及:成份、力学性能、物理性能等。
(三)、钢构表面要求1.钢结构件表面需经喷砂处置,除锈品级;假设手工进行表面处置,需介于St2与St3之间。
2.喷砂后需喷涂底漆为红丹防锈漆一遍,面漆为醇酸调和漆两遍,总干膜厚度为125μm;附着力达到ISO品级1级或ASTM品级4B级;3.结构件表面不能有明显的变形、划伤、撞伤、凹槽、凸现、缺失、分层等缺点。
(四)、焊接要求1.所有焊接都需有相应的焊接标准和标准,并进行焊接工艺验证;2.现场焊接时,需知足焊接标准的要求;3.焊缝表面不能有裂纹、气孔、夹渣、未熔合、未焊透、虚焊、形状缺点及上述之外的其他缺点;4.主梁受拉区的翼缘板、腹板的对接焊缝应进行无损探伤,超声波探伤不低于11345中的I级,并提供报告的复印件。
(五)、传动要求1.传动设计需考虑传动效率最优化;2.传动机构要求简单合理,以最少的环节实现功能;3.传动设计需考虑现场噪音操纵,尽一切可能降低噪音的产生;4.变速箱(SIEMENS或SEW)、电机(SIEMENS或SEW变频电机)、轴承(SKF或NSK)等部件要求指定厂家或品牌;5.变频电机采用的范围:风机、需调速的传动机构、需要和传动机构配合的传动系统。
机械设计制造及其自动化专业课程

机械设计制造及其自动化专业课程机械设计制造及其自动化专业课程主要课程在高中文化知识的基础上,掌握本专业所必需的基础知识、基本原理和较熟练的专业实践技能:机械制图、工程材料、工程力学,机械原理、工程经济,机械设计基础、电工与电子技术、微机系统原理与接口技术、机械工程材料、制造技术基础、微机电系统与制造,设备故障诊断、机电驱动技术、机械制造工艺学、控制工程、测试技术、数控技术、金属材料。
基础课从应职岗位需求出发,充分考虑学生的文化基础,选择灵活多样的教学方法和适宜的教学内容。
教学重点应是教法改革和内容选择,并注意培养学生自主学习和再学习的能力。
根据教学内容,教师恰当地分配每一次课的时间,确定自学讨论、讲授、实验与练习所占的时间比例。
同时使学生在学习态度、学习方法上为续课程打下基础。
利用第二课堂活动。
以形势报告、文艺汇演、音乐、美术欣赏及心理健康咨询等提高学生素养;结合“两操一课”与体育竞赛增强学生体质;开展英语知识竞赛、演出与口才训练、书法、绘画、微机强化等培训班培养学生的特长,提高学生推销自己的能力,增加就业机会。
1.两课本课程包括马克思主义哲学、毛泽东思想概论、邓小平理论和三个代表重要思想、法律基础知识、思想品德修养。
本课程是高等职业技术学院学生必修的一门德育课,主要讲授马克思主义哲学基础;充分认识毛泽东思想是中国共产党人在长期奋斗中坚持马克思主义基本原理同中国具体实际相结合的第一个理论成果;深刻领会邓小平理论和三个代表重要思想的意义,掌握邓小平理论和三个代表重要思想的理论论述;使学生了解宪法、行政法、民法、经济法、刑法、诉讼法中与学生关系密切的有关法律基本知识;对学生进行普遍关心的形势、政策、人生、理想、道德、民主、纪律等方面的教育。
初步树立正确的世界观、人生观和价值观;做到知法、懂法,增强法律意识,树立法制观念,提高辨别是非的能力;培养学生优良的思想品质、理想和人生观,为将来从事社会实践,做一个合格的高职生打下基础。
化工自动化基础
第一节 化工自动化的基本概念
3.2、检测元件及变送器:它将ቤተ መጻሕፍቲ ባይዱ要监测的 工艺变量的变化转换成特定信号(电信号), 为自动控制系统提供控制的依据。
3.3、调节器:它把检测元件与变送器送来 的信号与工艺上需要保持的设定值信号进行 比较得出偏差,根据偏差的正负、大小及变 化趋势,按预先设计好的控制规律进行运算 后,输出相应的控制作用给执行机构。
第一节 化工自动化的基本概念
3.4、执行器:它接受调节器送来的信号, 相应地改变操纵变量,克服扰动的影响, 实现控制要求。在化工生产中最常用的执 行机构是气动薄膜调节器。
第二节 调节器及基本调节规律
调节器是自动控制系统的重要组成部分。 它将生产过程被控变量的测量值与设定值 进行比较,得出偏差,根据偏差的正负、 大小和变化趋势,按照一定的运算规律输 出控制信号,送往执行器,实现对生产过 程的自动控制。
第一节 化工自动化的基本概念
3、自动控制系统的组成
自动控制系统主要由两大部分组成,一部 分是起控制作用的全套自动化装置,它主要 包括检测元件及变送器、调节器和执行器; 另一部分是自动化装置控制下的被控过程。 3.1、被控过程:自动控制系统中,工艺变 量需要控制的生产过程、设备或机器称被控 过程。化工生产中的各类塔器、反应器、泵、 压缩机以及各种容器、储槽(罐),甚至一 段输送流体的管道都可以是被控过程。
第五节 复杂控制系统
第五节 复杂控制系统
第五节 复杂控制系统
3、比值控制系统
使两个或两个以上物料量保持一定比值 关系以达到某种控制要求的控制系统,称 为比值控制系统。
第五节 复杂控制系统
第五节 复杂控制系统
4、前馈控制系统
前馈控制是改善和克服反馈控制不及时 的另一种控制方法。它是利用补偿原理, 采用开环结构,按扰动作用的大小进行控 制。
第二章工业机器人的机械设计基础

水平多关节机器人( SCARA )
l 结构特点 - 作业空间与占地面积比很大, 使用起来方便; - 沿升降方向刚性好,尤其适合 平面装配作业
SCARA-Selective Compliance Assembly Robot Arm
1978年由日本山梨大学牧野洋 教授首先提出
并联机器人 模拟器
定姿态达到的点所构成的体积空间。记作Wp (P)。
➢ 次工作空间:总工作空间中去掉灵活工作空间所余下的部分。记作Ws
(P)。
工作空间
工作空间的两个基本问题: 1、给出某一结构形式和结构参数的操作机以及关节变量的变化范围,求 工作空间。称为工作空间分析或工作空间正问题。 2、给出某一限定的工作空间,求操作机的结构形式、参数和关节变量的 变化范围。称工作空间的综合或工作空间逆问题。
等,医疗外科… 微动机构和微型机构:显微外科、细胞操作、误差补偿器. 加工设备:虚拟轴机床,很容易获得6轴联动,前两年研究
的较多,近年来,大家发现虚拟机床很难获得高的加工精 度,如天津大学的黄田教授等人进行了多年的研究,发现很 难超过20μ .
娱乐:《真实的谎言》中的拍摄施瓦辛格驾驶鹞式飞机,就 是在一个stewart平台上进行的.
主要内容
工业机器人常见构型 机器人基本概念与关键参数 机器人的运动学 机器人工作空间与轨迹规划 机器人静力学与动力学 机器人关键功能部件 机器人元器件与传动方式 机器人典型结构与运动 机器人设计与分析 机器人设计思想与设计方法
机器人组成
机器人是一个高度自动化的机电一体化设备。从控制观点来看,机器人系统 可以分成四大部分:机器人执行机构、驱动装置、控制系统、感知反馈系统。
9. 示教再现:具有记忆再现功能的机器人。操作者预先进行逐步示教,机器人记 忆有关作业程序、位置及其他信息,然后按照再现指令,逐条取出解读,在一 定精度范围内重复被示教的程序,完成工作任务。
机械设计基础第4章
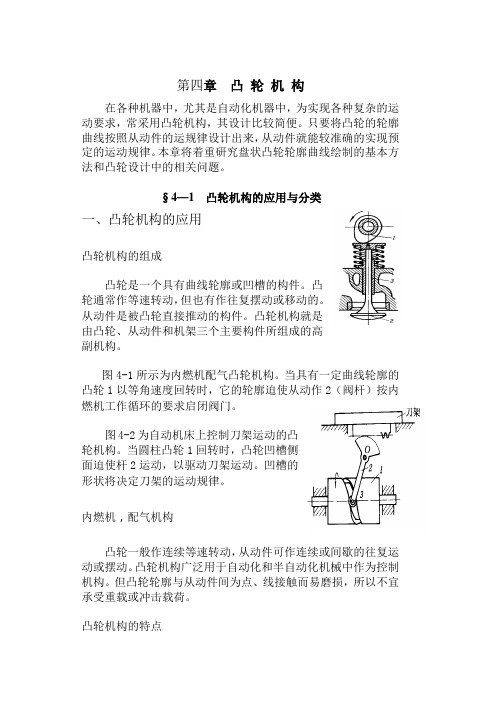
第四章凸轮机构在各种机器中,尤其是自动化机器中,为实现各种复杂的运动要求,常采用凸轮机构,其设计比较简便。
只要将凸轮的轮廓曲线按照从动件的运规律设计出来,从动件就能较准确的实现预定的运动规律。
本章将着重研究盘状凸轮轮廓曲线绘制的基本方法和凸轮设计中的相关问题。
§4—1 凸轮机构的应用与分类一、凸轮机构的应用凸轮机构的组成凸轮是一个具有曲线轮廓或凹槽的构件。
凸轮通常作等速转动,但也有作往复摆动或移动的。
从动件是被凸轮直接推动的构件。
凸轮机构就是由凸轮、从动件和机架三个主要构件所组成的高副机构。
图4-1所示为内燃机配气凸轮机构。
当具有一定曲线轮廓的凸轮1以等角速度回转时,它的轮廓迫使从动作2(阀杆)按内燃机工作循环的要求启闭阀门。
图4-2为自动机床上控制刀架运动的凸轮机构。
当圆柱凸轮1回转时,凸轮凹槽侧面迫使杆2运动,以驱动刀架运动。
凹槽的形状将决定刀架的运动规律。
内燃机,配气机构凸轮一般作连续等速转动,从动件可作连续或间歇的往复运动或摆动。
凸轮机构广泛用于自动化和半自动化机械中作为控制机构。
但凸轮轮廓与从动件间为点、线接触而易磨损,所以不宜承受重载或冲击载荷。
凸轮机构的特点1)优点:只要适当地设计出凸轮的轮廓曲线,就可以使推杆得到各种预期的运动规律,且机构简单紧凑。
2)缺点:凸轮廓线与推杆之间为点、线接触,易磨损,所以凸轮机构多用在传力不大的场合。
二、凸轮机构的分类凸轮机构的类型很多,通常按凸轮和从动件的形状、运动形式分类。
⒈按凸轮的形状分类(1)盘形凸轮它是凸轮的最基本型式。
这种凸轮是一个绕固定轴转动并且具有变化半径的盘形零件,如图4-1。
(2)移动凸轮当盘形凸轮的回转中心趋于无穷远时,凸轮相对机架作直线运动,这种凸轮称为移动凸轮。
在以上两种凸轮机构中,凸轮与从动件之间的相对运动均为平面运动,故又统称为平面凸轮机构。
(3)圆柱凸轮(圆柱凸轮是一个在圆柱面上开有曲线凹槽,或是在圆柱端面上作出曲线轮廓的构件,它可看作是将移动凸轮卷于圆柱体上形成的。
化工仪表自动化基础知识
④节流装置应正确安装。
⑤接至差压变送器的差压应该与节流装置前后差压相一致,这就需要正确安装 压信号管路。(如后面图示)
(2)靶式流量计F≈K*Q
(3)转子流量计
转子流量计示意图
靶式流量计示意图
(4)涡轮流量计
(5)电磁流量计
电磁流量计工作原理图
涡轮流量计示意图
(6)旋涡流量计q=f/k (7)超声波流量计∆t≈2Lv/c2
电容式压力传感 器示意图 压电式压力传感器结构示意图
DTC二O .流量检测及仪表
分类 1、速度式流量计(差压式流量计、转子式流量计、电磁流量计、涡轮流量计、堰 式流量计) 2、容量式流量计(椭圆齿轮流量计(罗茨)、活塞式流量计) 3、质量流量计 4、热导式流量计
(1)、速度式流量计 (1)节流装置—包括孔板、喷嘴和文丘管 Q=K*Sqr(∆P)
过程参数仪表位号的字母代号如下:
字母
A B C D E F G H I J K L M N P Q R S T U V W
第一位字母 被测变量或初始变量
分析 喷嘴火焰 电导率 密度或重度 电压(电动势) 流量 尺度(尺寸) 手动 电流 功率 时间或时间程序 物位 水份或湿度 浓度 压力或真空 数量或件数 放射性 速度或频率 温度 多变量 拈度 重量或力
2、常用压力检测仪表
(1)弹性式压力表
①膜片
②波纹管波纹管
③弹簧管弹簧管
平薄膜 波纹膜 波纹管 单圈弹簧管 多圈弹簧管
(2)压力传感器
①应变片式压力传感 器 ②压电式压力传感器 ③压阻式压力传感器 ④电容式压力传感器 ⑤集成式压力传感器
箔式应变片
弹簧管压力表
压阻式集成传感器 检测元件示意图
FA工业自动化设备设计基础
产)、降低成本、便于调试、维护等方面。
通常的机械功能模块都有两大部分:驱动系统和执行机构。
在工厂自动化设备中,我们常用的驱动系统主要有:电机驱动系统(异步电 机驱动系统、伺服电机驱动系统、步进电机驱动系统、直线电机驱动系统等)、 液压驱动系统、气动驱动系统。
常用的执行机构主要有:齿轮机构(包括蜗轮蜗杆机构、齿轮齿条机构)、 连杆机构(包括曲柄滑块机构)、凸轮机构、带传动系统(包括:平皮带传动、 V 带传动、同步带传动)、链传动系统(包括滚子链、倍速链等)、丝杠导轨系统 等。
为了便于讲解,我们把自动化设备划分为的五大部分:上料、操作、卸料、 控制系统、人机界面。
上料 上料部分实际上包括三大功能模块:上料模块、排列模块和分料模块 (或者合流模块)。在工厂生产实际中,各种各样的原料加载衍生了各种类型的 上料机构或上料装置。我们在工程实际中常用的上料方式主要有:振动盘上料、 漏斗型料仓上料、料盘上料以及弹匣式料仓上料。在上料过程中,根据产品的外 形规格还需要对产品进行整列,这就是排列模块的工作。而从上料模块到排列模 块出来的产品都是一个挨一个的,这就需要有分料模块来将即将取走的工件从整 列队列中分离出来,这是分料模块的活。若果是装配类设备,还需要有多种材料 上料,那么,我们需要将各种原材料按照装配顺序进给,所以,我们也需要有合 理的合流装置。
另外,根据设备需要和运动方式的不同,有一个非常重要的概念需要强调: 间歇机构。间歇机构指的是为实现间歇运动而设计制作的机构。比如:分度盘(实 际上是凸轮机构的一种)、槽轮机构、棘轮机构以及由软硬件结合而形成的步进 间歇系统、伺服间歇系统等。
四 设备元器件
我们把设备中采购进来的可以直接装配的部件称为标准件,采购原材料需要 自己工厂进行加工的部件称为加工件。
自动化设备设计资料

• 液压传动的特点 1. 与电动机相比,在同等体积下,液压装置能产生更大的动力,也就是说
在同等的功率下,液压装置的体积小,重量轻. 2. 液压装置工作平稳,换向冲击小,便于实现频繁换向. 3. 液压装置很容易实现过载保护,能实现自润滑,使用寿命长. 4. 液压装置容易作到对速度的无级调节,并且对速度的调节还可以在工
2. 气压传动的工作介质粘度很低,所以流动阻力很小,压力损失小,可以便于集 中供气和远距离输送.
3. 气压传动对环境的适应性好,在易燃,易爆,多尘埃,强辐射,振动等恶劣工作环 境下仍能可靠地工作.
4. 气压传动动作速度及反应快.液压油在管道中的流动速度一般为1~5m/s, 而气体流速可以大于10 m/s,甚至接近声速,因此在0.02~0.03s内即可以
作中进行. 5. 液压装置易于实现自动化,很方便对液体的流动方向,压力和流量进
行调节和控制,并能很容易地和电气,电子控制和气压控制结合起来, 实现复杂的运动和操作. 6. 液压元件易于实现系列化,标准化和通用化,便于设计,制造和推广使 用
7. 由于液压传动中的泄露和液体的可压缩性使这种传动无法保证严格 的传动比.
三.液压和气压传动的执行元件 1.液压传动中的执行元件是油缸,气
压传动中的执行元件是气缸. 2.油缸和气缸的品牌 • 进口的: AIRTAC(台湾亚德克
),SMC(日本),英国的诺冠,美国的 派克等
• 国产的:佛山的实用, 肇庆的方 大等
3.油缸和汽缸的基本参数 • 结构型式 • 缸径 • 行程 • 安装方式
3. 定位机构和夹紧机构 它能使工件在设备上的位置实 现唯一性,使装配件与被装配件之间的自由度得到合理 的控制,从而实现自动化生产和装配. 它也是接下来要 重点讨论的一个课题。
柑橘自动化分级装备的机构设计及实现
三、翻的物料翻转,以便进行下一步处理。在设计翻 转机构时,需要考虑以下几点:
1、翻转角度:翻转角度应可调,以适应不同物料的处理需求。 2、翻转速度:翻转速度应可调,以适应不同处理量的需求。
二、自动化机构设计的原则
1、模块化设计:模块化设计是一种设计方法,它将复杂的问题分解为更小、 更易于管理的部分。这种方法使得设计者可以更加专注于解决特定的问题,而 不是试图一次性解决所有的问题。在自动化机构设计中,模块化设计可以使机 器的组装和维护更加简单,从而提高生产效率。
2、预先规划:在自动化机构设计中,预先规划是必不可少的。设计师需要预 先确定机器的操作流程,了解每个部件的功能和相互关系,并确定可能出现的 故障模式和解决方案。通过预先规划,设计师可以更好地理解机器的性能,从 而提高机器的可靠性和稳定性。
柑橘自动化分级装备的机构设 计及实现
01 引言
03 机构设计
目录
02 背景 04 参考内容
引言
柑橘作为世界上重要的水果之一,其生产过程需要经过复杂的采摘、分级、包 装等环节。传统的手工分级方式效率低下,精度难以保证,已经无法满足现代 农业大规模生产的需求。因此,研究柑橘自动化分级装备具有重要的现实意义。 本次演示将围绕柑橘自动化分级装备的机构设计及实现展开讨论,旨在为相关 领域的研究提供参考。
谢谢观看
3、优化设计:优化设计是一种寻找最佳解决方案的过程。在自动化机构设计 中,优化设计可以帮助设计师找到最有效的解决方案,以实现机器的高效运行。 优化设计需要考虑许多因素,如机器的成本、性能、耐用性等。
三、自动化机构设计的实际应用
自动化机构设计在许多领域都有广泛的应用,如汽车制造、电子产品制造、食 品加工等。例如,在汽车制造中,自动化机构设计被广泛应用于生产线上的装 配、焊接和检测等环节。优良的机构设计可以提高生产效率,降低生产成本, 并提高产品的质量和一致性。
自动化机构设计工程师速成宝典

《自动化机构设计工程师速成宝典》是一本非常值得一读的书籍。它不仅能 帮助初学者快速入门,也能为有经验的工程师提供新的思路和方法。通过这本书 的学习,我对自动化机构设计有了更加深入的理解和认识,也更加熟悉了实际操 作中的各种技巧和方法。我相信,在未来的学习和工作中,这本书将会成为我不 可或缺的参考资料和指导手册。
本书还自动化机构设计中的一些前沿技术和趋势,例如智能制造、工业0等。通过介绍这些先进 技术的应用和发展,激发读者对自动化机构设计的兴趣和热情,为未来的职业发展打下坚实的基 础。
《自动化机构设计工程师速成宝典》是一本实用性强、易于理解的学习资料。通过阅读本书,读 者可以快速掌握自动化机构设计的基本知识和技能,提高自己的实际操作能力和创新思维能力。 无论是初学者还是有一定基础的工程师和技术人员,本书都是一本值得一读的参考书籍。
阅读感受
《自动化机构设计工程师速成宝典》这本书,对于我这样的初学者来说,是 一本极具启发性和实用价值的书籍。作者柯武龙先生以他丰富的实践经验和深厚 的理论功底,为我们揭示了自动化机构设计的奥秘。
这本书共分为入门、实战、高级篇三大部分,每一部分都针对不同层次的读 者进行了详尽的阐述。从最基础的理论知识到实际操作,再到高级技巧的应用, 每一个章节都让人受益匪浅。
该部分对整个目录进行了概述,分析了目录的结构特点,如章节划分、知识 点的逻辑关系等。通过这一部分,读者可以对本书的知识体系有一个整体的认识。
该部分对目录中的每个章节进行了详细解读,包括各章节的主题、主要知识 点、学习方法等。通过这一部分,读者可以深入了解每个章节的具体内容和学习 重点,为后续的学习做好准备。
这句话强调了安全在自动化机构设计中的重要性。任何工业设备或系统都应 该在保证安全的前提下进行设计和运行。只有确保安全,才能保证生产的稳定和 人员的安全。
机械设计制造及其自动化读书笔记
机械设计制造及其自动化读书笔记机械设计制造及其自动化是一门专业性很强的学科,它涉及到机械工程中使用的各种工具、材料和技术。
在我阅读机械设计制造及其自动化相关的书籍时,我收获了很多有关机械设计制造和自动化的知识和技能。
以下是我的读书笔记:第一章:机械设计基础机械设计是机械工程中最为基础和重要的部分之一。
机械设计工程师需要具备广泛的知识,包括材料力学、热力学、流体力学、传感器技术以及自动化技术等。
机械设计需要考虑各种因素,例如材料的可行性、成本、强度要求、使用环境等。
在设计过程中,设计师需要运用计算机辅助设计软件来进行模拟和优化,以确保设计符合要求。
第二章:机械制造工艺机械制造工艺是机械制造的核心环节。
它包括了机器零件的设计和加工工艺、装配工艺以及测试和检验工艺等。
机械制造工艺需要考虑到如何提高生产效率、降低生产成本、保证质量、减少工艺误差等。
在本章中,我学习了许多机械制造工艺的基本原理和方法,例如车削、铣削、镗削、磨削、锻造、冲压以及焊接等。
第三章:机械系统动力学机械系统动力学是研究机械系统的运动规律和相互作用的学科。
它涉及到力学、运动学以及控制论等多个方面。
在本章中,我学习了机械系统的运动学设计原理和计算方法,了解了振动和噪声的产生机理以及控制方法。
此外,我还了解了运动学链和机构的工作原理,并学习了如何设计和分析机构的运动特性。
第四章:自动化技术在机械制造中的应用自动化技术在现代机械制造中起着至关重要的作用。
它可以提高生产效率、减少生产成本和人力资源的使用,同时还可以提供更高的产品质量和稳定性。
在本章中,我学习了自动化技术的原理和方法,掌握了PLC(可编程逻辑控制器)的应用、传感器和执行器的选择和使用,以及自动化控制系统的设计和调试方法。
第五章:机器人技术在机械制造中的应用机器人技术是自动化技术的重要组成部分,广泛应用于机械制造行业。
机器人可以代替人工完成一些复杂、重复且危险的操作,提高生产效率和质量。
FA工厂自动化设计基础
五
图纸
图纸是设计与加工、装配进行沟通的语言,其重要性不言而喻。图纸包括机 械图纸和电气图纸。机械图纸还包含装配图和零件图,电气图纸包括电气原理图 和接线图。
六
软件
目前,自动化设备领域常用的设计软件有:CAXA、Auto CAD、Solidworks、 Pro/Engineer、Unigraphics、CATIA、Solid Edge、Protel、VB、VC、Lab View 等。 机械设计领域内的软件使用原理大抵相似,所以,诸位只需选择其中一种熟悉其 操作即可。软件只是一门工具,其使用也是熟能生巧的事,只要在实际工作中使 用一段时间自然就熟练了,诸位大可不必去花大量精力去研究,以免舍本逐末。 以上内容是对于工厂自动化设备及其系统、模块、器件等进行了列举,目的 在于让诸位对设备及设备的内容有一个初步了解,明确自己需要掌握的相关知 识。 只有具备了对这一系列知识的深刻理解和元器件的了解才有可能真正踏入工 业自动化设备设计的大门。 设备设计制造是一个综合→分析→综合的过程: 整体布局设计→模块设计→ 部件设计→加工→装配。所以,以上介绍是自整体到部件的顺序。基于人的学习 过程是从局部到整体的顺序,后续的篇幅顺序则是:图纸→部件→整机。所以, 本文的阅读顺序是:如果从学习的角度,需要从头到尾按篇幅介绍顺序阅读;如 果从设计实践的角度,则应该从最后一章看起,以篇幅相反的顺序阅读。 需要提醒诸位的是:请重视基础原理。机械设计是非常庞大的系统知识的综 合运用,所以,请诸位努力掌握好材料学、理论力学、材料力学、机电传动系统、 液压气压传动、机械原理、机械设计、公差配合、机械制造工艺基础、人机工程 学等相关学科知识。人的精力是有限的,知识是无限的。所以,需要把有限的精 力放在钻研最重要的知识中去。所以,以下章节中所提到的大部分的元器件诸位 不必都去研究它的工作原理,明白其功能、使用方法、掌握正确选型即可。需要 了解工作原理的地方,文中自会阐释清楚。需要告诫诸位的是:在工程实践中任 何原理原则不是万能的,切不可生搬硬套,搞教条主义,必须要具体问题具体分 析,灵活运用基本原理解决实际问题始终是工程师的工作准则。
非标自动化基础-30-凸轮机构种类认识及选用

凸轮机构种类认识及选用目录1.凸轮机构认识2.常见凸轮机构约束方法3.凸轮机构简要说明4.凸轮曲线5.凸轮机构的设计6.凸轮材料7.凸轮加工8.凸轮应用9.凸轮的设计要点FollowerPressure anglePitch curveCam profile Base circle 1、凸轮机构的相关术语一、凸轮机构认识凸轮机构的相关术语说明1.凸轮理论廓线:从动件(推杆)对凸轮作相对运动时,从动件上的参考点(尖端从动件的尖端和滚子从动件的滚子中心等)在凸轮平面上所面的曲线.2.凸轮工作廓线:与从动件直接接触的凸轮轮廓曲线,也称凸轮实际廓线.3.压力角:凸轮给从动件的正压力方向(即接触点的公法线nn 方向)与从动件受力点速度v方向间所夹的锐角.4.基圆及其半径:以凸轮转动中心o为圆心,凸轮理论廓线的最小半径为半径所画的圆称为基圆,其半径称为基圆半径,以Rb表示.a)圆端直动从动杆移动凸轮b)圆端直动从动杆移动凸轮(从动型)c)圆端摆动从动杆移动凸轮d)圆端直动从动杆平面凸轮e)圆端摆动从动杆平面凸轮f )平端直动从动杆平面凸轮一、凸轮机构认识2、凸轮机构的简介一、凸轮机构认识g)平端摆动从动杆平面凸轮h)圆端直动从动杆沟槽凸轮i)圆端摆动从动杆沟槽凸轮j)等幅凸轮k)共轭凸轮(摆动从动件)l)共轭凸轮(直动从动件)一、凸轮机构认识m)平行分度凸轮n)圆端直动从动杆端面凸轮o)圆端摆动从动杆端面凸轮p)圆端直动从动杆圆柱凸轮q)圆端直动从动杆凸缘凸轮r)筒形凸轮s)弧面凸轮三.凸轮机构简要说明基圆指从动件在停留角的状态下走过的凸轮轮廓的最小半径所在的圆.φ从动件运动方向凸轮法向方向压力角指运动接触点的凸轮法向方向与从动件运动方向的夹角压力角越小越好,设计时直动的压力角应<20 °,摆动从动件可以略大四.凸轮曲线凸轮曲线指凸轮驱动的从动件的运动曲线,横轴为时间,纵轴为位移.四.凸轮曲线目前常用的2种凸轮曲线:修正梯形修正正弦四.凸轮曲线由此根据时间和位移的比例关系来确定有量纲的s,v,a,j值.例n=200rpm,stroke=3mm,MS凸轮曲线,升程角60°,圆端直动从动杆平面凸轮机构,根据无量纲参数可以求出v m,a m,j m1.凸轮转速(200/60)*360=1200°/s2.升程时间t h=60/1200=0.05s3.v m=(stroke/t h)*V m=(3/0.05)*1.76=105.6mm/s4.a m=(stroke/t h2)*A m=(3/0.052)*5.528=6633.6mm/s25.j m=(stroke/t h3)*J m=(3/0.053)*69.47=1667280mm/s3(j m是反映加速度变化快慢的参数,可以理解为接触点受力变化的程度.)五.凸轮机构设计1.顶切2.浮起凸轮设计时应注意凸轮的曲率半径的问题.1.顶切,在设计中先确定cam follower 中心的运动曲线,然后再决定凸轮的轮廓曲线时若ρ凸min <r cam follower ,发生顶切现象.2.浮起,在设计中如果ρ凹min <r cam follower , cam follower 不能到达最低段,发生浮起现象.曲率半径影响凸轮表面的接触应力,曲率半径一般取ρ凹min >2r cam follower ,越大越好.平滑的样式Rc作为设计计算时的基圆半径Rcθ*Rc可以将此凸轮曲线转化为平面凸轮圆半径五.凸轮机构设计以端子插针机为例介绍凸轮机构设计步骤:1.分析插针动作确定使用凸轮数量目前厂内端子插针有下列三个动作a.端子裁切端子与料带分离,与Holder夹紧端子b.端子插入端子插入HSGc.Holder回位holder张开保证端子脱离上述三个动作是按时间配合的独立动作,因此需要三个凸轮来完成.五.凸轮机构设计2.时序确定Punchholderinsertcam曲线的类型45 °时从动件的位置凸轮旋转方向(正时针,逆时针)凸轮基圆半径strokevAJθR10deg五.凸轮机构设计5.草图设计根据速度,加速度,跳动,求出凸轮机构所需要的动力,以裁切凸轮为例计算.a.量纲转换n=600rpm=10*2*3.14rad/sV max=6.72*10-3*3.14*10*2=0.42m/s, 裁切时的速度约为最大速度a max=26.9*10-3*(3.14*10*2)2=106m/s2b.裁切工作负载F=t*L*σ=0.2*4*53=42kgfc.惯性负载F=m*a max=0.1*106=1kgfd.裁切功率P=F*v=43*9.8*0.42=180we.裁切扭矩T=P/ω=180/(3.14*2*10)=2.9N*mf.马达选取Panasonic MSMD042G1U 400w未考虑凸轮机构约束弹簧的力,阻尼等因子,因此有必要在马达前加减速机,确保能提供所需的扭矩..五.凸轮机构设计345k=4N/mmF0=2*3*4=24N五.凸轮机构设计6.凸轮机构约束弹簧的选定约束弹簧的选定可以根据计算,也可以根据图解法得出,以裁切凸轮为例.•计算法:假设滚子刚好脱离凸轮便力平衡的方程m从动件质量a从动件加速度k弹簧系数y从动件位移F0弹簧初始张力α=F0/(k*y h)ma+ky+F0=0 (未考虑粘性阻力系数,摩擦力)0.3*106-k*1.5-2*3*k=0K=4.2N/mm 与图解法相近.Punchholderinsertcam五.凸轮机构设计7.凸轮图面图面中应该注明的要素有a.凸轮的外形尺寸b.时序c.stroked.cam follower 尺寸e.凸轮从动件运动的方式f.凸轮曲线类型g.凸轮旋转方向h.凸轮加工的技术要求i.凸轮材料,表面处理的方式六.凸轮材料凸轮和滚子的材料应该由足够的接触强度和良好的耐磨性.1.提高表面硬度可以提高接触强度2.耐磨性与材料的表面硬度有关,硬度越高,耐磨性越好.3.耐磨性与凸轮和滚子材料的搭配业有关.淬硬钢与磷青铜耐磨性好,但未淬硬钢与青铜之间的耐磨性就差.凸轮的材料有很多,目前使用的有SKD11,SCM440等,它们都应做表面处理,高频表面淬火,渗氮等.滚子一般都是外购标准品.七.凸轮加工1.直动凸轮X,Y联动工作台可以实现直动凸轮加工,刀具的直径可以比滚子直径小.七.凸轮加工2.平面凸轮X,Y轴联动加工刀具直动,凸轮旋转联动加工加工平面的沟槽凸轮时,精加工的阶段采用立铣刀的直径与滚子相同.七.凸轮加工3.圆柱凸轮直动从动件圆柱凸轮采用刀具直动,凸轮旋转联动加工,精加工的阶段采用立铣刀的直径与滚子相同.摆动从动件圆柱凸轮采用刀具X,Y联动,凸轮旋转联动加工,精加工的阶段采用立铣刀的直径与滚子相同.4. 双滚子空间凸轮实际运用:裁切.插针.夹持八.凸轮应用5. 盘形槽式凸轮实际运用:压入.辅助定位.植入一般槽凸轮均会有接触点不再同一侧的问题,这使滚子在沟槽内的运动时而正转、时而逆转,使滚子与沟槽产生相互撞击影响凸轮与滚子的寿命。
自动化基础知识幻灯片课件
04
自动化技术的发展趋 势
人工智能与自动化
人工智能技术为自动化系统提供更高效、智能的决策支持,实现更精准的控制和优 化。
人工智能算法应用于自动化系统,可提高数据处理速度和准确性,降低人工干预需 求。
人工智能技术有助于自动化系统更好地适应复杂环境和不确定性因素,提高系统的 鲁棒性和自适应性。
机器学习与自动化
根据系统设计,使用合适的编程语言和工具 进行编码实现。
单元测试
对每个模块进行单元测试,确保每个模块的 功能正常。
集成测试
将所有模块集成在一起进行测试,确保模块 之间的协调工作正常。
系统测试
模拟实际运行环境,对整个系统进行全面测 试,确保满足需求。
06
自动化系统的应用实 例
工业自动化生产线
自动化生产线概述
执行机构可以是电动机、气动或液压系统等,根据控制装置 的输出信号,驱动设备或机器进行工作。
检测装置
检测装置用于检测被控对象的各种参 数,如温度、压力、流量等,并将检 测结果转换为电信号或数字信号传送 给控制装置。
检测装置包括各种传感器、变送器和 测量仪表等。
控制系统
控制系统是自动化系统的组成部分,它由控制装置、执行 机构、检测装置等组成,通过信号传输和数据处理实现自 动化控制。
机器学习技术为自动化系统提 供强大的数据处理和分析能力 ,实现数据驱动的决策和控制 。
通过机器学习算法,自动化系 统能够自我学习和优化,不断 提高自身的性能和效率。
机器学习技术有助于自动化系 统更好地应对各种复杂和动态 的任务需求,提高系统的灵活 性和适应性。
物联网与自动化
物联网技术为自动化系统提供更 广泛的信息感知和交互能力,实 现设备间的互联互通和协同工作
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
治具精度控制
❖ 确保产品精度的先决条件,是要求治具本身的精度,通常治 具的精度一定要高于产品精度的10倍以上(理想值,即是治 具制作的容许公差是产品公差的十分之一,)除了治具的精 度以外,还需要注意以下几点.
❖ 1.组成治具的零件,材料及加工方式 ❖ 2.在工件定位为加紧作业中,与加工零件所接触的材料及
1.5倍要求) ❖ 4.出料方向:根据设计者的要求物料的排列方向 ❖ 5.是否需要加接直线振轨:根据物料的大小和设计者的需
求而订.(包括物料的体积,重量,与轨道的接触面积等) ❖ 6.出料轨道之接口要求:振动盘厂商加工的出料接口与设
计者设计的缺口是否可以吻合 ❖ 7.振动盘振动方向:振动盘出料方向分为逆向是正向 ❖ 8.是否需求满料检知 ❖ 9.是否需要横纵向可调.
❖ 2.供料:从储料器中将零件整列,分离,并送入待装配或待组 立位置之机能
❖ 3.组立:将两个或两个以上的零件装入或结合成一体称之 为组立,
❖ 4.停留:治具或工件不移动而暂时停止之状态 ❖ 5.整列:使零件的方向或方位一致化以便后工序作业 ❖ 6.分离:在流动的零件群中,将其中之一,或数个隔离 ❖ 7.裝配,裝入:将零件置入或插入治具或其他零件所定之位
❖ 2.根据生产量,短期或长期使用,单日生产量及工件流程等 使用条件,在简易式,单动式或自动式夹治具中做适当选择, 以符合生产线之需要.
❖ 3.根据治具使用时所使用的工作母机及组立机的种类,加 工顺序,使用泛用机或专用机等条件,来决定治具之安装, 治具生产前之准备,以及治具之管理方式
❖ 4.治具设计是否使作业线作业容易,以提高工作效率. ❖ 4.1.将零件装入或者取出治具时,是否容易作业?(这是自
自动化设备需要具备的要素
❖ 1.移载系统(移送,搬送,传动系统) ❖ 2.供料系统(或称为供给系统) ❖ 3.加工系统(或称为组立系统) ❖ 4.检查系统 ❖ 5.控制系统 ❖ 在自动组立作业中,称<移载>,<供料>及
<组立>为自动化的三要素
几种名词解释
❖ 1.移载:将工件或治具沿生产线移动或停留某一位置的机 能
多为90°
Z面摇动型
取放端在垂直面上摆动,从倾 斜的滑规中取出零件进行装
配作业
机械手特点
❖ 1.人类的手实际上是机富有使用弹性及适用性的 器具,拥有与手相同的适应性及弹性的机械手是 永远造不出来的
❖ 但是就动作之迅速,对重物夹持的能力,长时间 连续动作的能力,机械定位精度之再现性等特性 而言,机械手则比人手更胜一筹.
弹簧使用注意事项
自由高度
F
中径
F
D 倒角 H<D
同步带与同步带轮的选择
幾種刀具材料特性
钢的符号
工作硬度
磨损抵抗
SK3
56-65
B
SK5
56-65
B
SKD158-62ESK1158-60E
SKI2
57-60
D
SKH9
63-65
C
VEE SKD
60-62
A
组立系统设计与装配事例
表面处理应适当的考虑,(比如与零件直接接触的部分是否 可以使用较软的材料,或加缓冲等) ❖ 3.治具的构成与装配方式,必须要有适当的定位,使分解后 再装配,其精度不会改变. ❖ 4.如果有数台相同的治具,确保其精度相同(均在治具之设 计容许的公差范围内),不允许工件精度出现偏差是零件之 互换性不良 ❖ 另外 治具设计必须使工件装入与拆卸均容易完成 ❖ 治具装卸与机械或作业台是能在短时间内完成,且精度再 现性极高
❖ 1.泛用性 ❖ 在一定的条件范围内,对形状与尺寸不同的工件,具有
如前所述基本必要条件之夹持功能,谓之手夹之泛用性. ❖ 2.手夹内有无工件之检出性能. ❖ 3.手夹内工件之姿势之检出性能 ❖ 4.具有控制手夹对工件夹持力的机能. ❖ 以上所述:进阶手夹中的必要条件之2,3项可以借助手夹
以外的检出装置进行.
取放装置
❖ 所谓取放装置,就是将待机位置的工件抓起, 然后将其运送至装入位置并装入对应的工 件中
❖ 取放装置主要使用在自动装配机或生产线 上,市场有标准件可以购买,
❖ 下面是根据取放端的运动轨迹分类举例
X-Z直线型
手夹
取放端之运动方向为 水平与垂直的合成运
动
工件
Z-θ摇动型
运动曲线
取放端在水平面上摆动, 同时也在垂直方向上做 升降运动,摆动的角度
振动盘使用中的重要性
❖ 1.零件供给之自动化,在自动组立中是极为关键,它的成 功与否对稼动率,不良率有极大的影响,自动化碰到的问 题,可以说80%是零件供给方面的问题.
❖ 2.我们公司使用的振动盘:我们公司使用的振动盘全部 为电磁振动式,被广泛使用的原因是对散乱零件容易使 用.可以利用送料盘之振动是出口部位可以设置整列选 向之功能.
产品在组装治具中的定位
❖ 1.平面定位(除了球体,椭圆的特殊形状的工 件之外,大部分加工件都有平面部分,此平面 可以作为定位基准,本身零件的平面尺寸公 差需要满足实际需要)
❖ 2.同心定位 ❖ 3.分度定位,可以使工件程某一角度定位 ❖ 4.混合定位
治具规划与设计时检验项目
❖ 1.治具加工时注意其功能,精度要求,材质,热处理,体积大 小,重量,毛边,及余料之程度
机械式振动盘
❖ 1.电磁式振动盘噪音较大,针对此问题,日本FIT开 发出回转式振料盘,商品名称DEXTER,其送料盘 内设倾斜只回转圆盘,借其回转之离心力将零件 送上回转的料轨.回转圆盘与料轨使用不同之马 达驱动,其马达转速依不同之零件供给速度可以 分别调整之.
❖ 2.与电磁振动式送料盘比较,其供给能力大,并且 噪音相对也小,但是其整列推送之技术层次较高, 也无法整列推送之工件.
❖ 在自动组立中,80%的动作是<插入>,<加盖>,及 <回转>等单纯组合,所以机械手不需要像人手那 样灵巧也可满足需要(如WD257/31R).
机械手设计之基本条件
❖ 1.工件之夹持与放开之机能 ❖ 2.对工件之约束功能 ❖ 机械手夹持工件时,机械手停留,移动及装入过程中,工件
之姿势不能受外力影响而变化.机械手必须具备充分之约 束力或具有拘束工件之形状. ❖ 3.工件位置精度之再现性 ❖ 其机械手设计,是工件与手夹之位置关系在一定精度内 具有再现的机能. ❖ 进阶手夹之必要条件
机械手分类
❖ 手夹根据夹持工件方法的不同,可以分为 夹爪型手夹,真空吸著型手夹与特殊手夹.
❖ 夹爪型手夹根据夹爪之开合方式,手夹之 运动轨迹及驱动力,驱动机构等,也可以做详 细分类.
❖ 依夹爪开闭之方分类:a,单开闭式,b,双开 闭式,c,混合开闭式
单开闭式手夹
气缸
固定基板
销
固定夹
工件
可动夹
双开闭式夹爪
我们所谓的标准化) ❖ 8.治具材料是否容易取得,能否使用库存品?可否在手工或
修改作业? ❖ 9.将治具装置于工作站之作业台上的定位与锁紧,是否可
以短时间内达成?(标准化) ❖ 10.治具相关之工件与工程名称(或代号,编号),是否刻写在
治具上(治具管理) ❖ 11.治具不使用时是否方便保管及搬运(机治具管理)
自动送料的几种方式
❖ 1.步进马达送料
❖ 1.1棘轮式拉料 ❖ 1.2步近进给式
❖ 2.振动盘自动供料式 ❖ 3.气缸移动进给式 ❖ 4.机械手加持给料式
气缸马达搬送物料设计要素
❖ 1.马达棘轮与料带定位孔配合公差. ❖ 2.配合马达移送之定位机构(定位与水平等) ❖ 3.拉料棘轮平行性 ❖ 气缸搬运注意事项 ❖ 1.物料的定位装置 ❖ 2.气缸行程注意事项(移送物料之定位性)
动化的第一步) ❖ 4.2.能否做单动式之治具设计,以单一动作完成定位,定心
与夹紧之技能. ❖ 4.3.治具加工时是否可以清楚的看到加工之状态(防止不
良品之发生)
治具规划与设计时检验项目
❖ 5.加工之工件是否容易变形或受伤 ❖ 6.治具的功能是否防止逆向零件装入?(防止不良发生,也
就是我们所说的防呆作用) ❖ 7.能否使治具使用标准零件,例如导柱导套,定位销等(就是
❖ 3.为了达到对工件整列选向的目的,需要根据工件之形 状上的差异做选向判别,并使出口只允许完成整列之工 件通过,在驱动工件的通过出口的同时也要特别注意,不 可以发生堵塞的状况,.出口处将表面摩擦系数降低,对降 低堵塞发生的几率有很大助益.
❖ 4.振动盘内的零件与其一次加满,不如在零件减少至1/4 时才补充,此时移动效率最高,如果料盘中接近无零件时, 大部分之零件均在料规上,缺乏来自料盘低部的推升力 量,其移动速度会因此而下降.
弹簧在使用中需要注意事项
在弹簧压缩圈数较多(弹簧自由高太大)中径较小,即弹簧 高度比=弹簧自由高度/弹簧中径较大时,外载荷达到一定 数值,会使弹簧发生侧向弯曲而丧失稳定性,如果弹簧的使 用超出其高径比时,可以采用导套导柱限位的方式(如下例)
a,注意弹簧使用位移量.
b,弹簧负载 弹簧负载=弹簧常数×位移量
❖ 13.工件:加工或组立作业之对象,可以将之组成组立品
❖ 14.作业周期:对一组立或加工而言,所需要作业时间称为 周期
❖ 15.节奏时间:在一个完整的加工或组立作业中,每一单独 子作业之作业时间
❖ 16.子作业:从整列,供料,移载,装配或加工至移出等,都属于 子作业的例子.
振动盘技术参数要求
❖ 1.出料高度:就是振动盘底部至出料借口处的高度 ❖ 2.是否需要可调:(简略) ❖ 3.出料速度(单位时间内出料的数量,基本上可按照需求的
置中 ❖ 8.分割分度作业(间歇移送):在移载作业中,使部品能以一
定之角度,时间或距离相间隔.
❖ 9.组立治具:为进行组立作业,用以承载并固定工件之治具