EPSON培训手册
爱普生入职培训教材

一.作为一名职业人基本的意识和想法1:从今天起,你为爱普生的一员‧‧‧以下是TQC 西谷正的讲话从现在起,你将成为EPH集团这个团队中的一员。
EPH集团是位于中国华南深圳地区,以制造生产打印机、手表为主导产品的企业。
下属有ESL、PIF、FIF各制造工厂,作为制造型的企业我们的工作任务是购入原材料,对其进行制造加工、使其成为产品、输送到市场,服务于顾客。
在这一系列的工作中各位将参与其中一部分工作。
在EPH集团里每位员工各就各位,尽职尽责,出色的完成工作才能取得相应的报酬。
再者、EPH集团的经营的优劣都由我们集团的每个人的力量,集团的凝聚力的好坏而决定。
充实自己、提高加强个人能力、取得别人对自己的信赖,这样才能促进EPH集团的不断发展。
在我年少时代,父母曾给我这样的教诲. “ 不要撒谎,遵守时间、遵守规则” 我一直铭记于心,能够出色地做到以上的三个要求。
换言之,就能赢得别人的信赖,似乎看起来是很容易做到的事情,但实际深入地理解渗透到日常的行动中,可不是那幺简单。
“ 不要撒谎” 举例而言,当工作出现失误时,不是辨解造成的失误、推御责任,而是应诚实、坦率的报告上司。
而此时作为上司根据其必要性,对由于发生错误而造成不良品,为了尽可能不要损害到顾客而采取迅速处理,以及相应的防范措施。
而此时,由于听取你的辨解的时间而上司对这件事更加焦急,延误对这件事采取的补救时机。
“ 所谓的遵守时间是不要浪费时间,有效地使用时间,人一生的时间是短暂的,能使用的时间也是有限的。
同样在公司、企业里的工作时间也是有限定的。
计划是利用时间的重要方法。
对于日常的业务工作,做好计划是工作之首。
毫无疑问在计划里一定有目的,有方法、也有时间。
做好工作计划,立好人生大计、遵守时间、实现人生目标与理想,我们才能过上有意义的生活。
“ 遵守规则” 就是不要给别人添麻烦。
勿庸置疑在人类社会里人的行为必然是有一方和另一方发生连系,才产生规则。
有规则就一定有对方,你的对方就是公司。
爱普生培训资料:EPSON机械手软件操作指南
四、RC+5.4.3软件操作
2、设定好项目名称及存储磁盘后单击“确定”进入如下画面,单 击“main”函数即可编辑程序了。
四、RC+5.4.3软件操作 三、程序下载运行
1、单击“运行”,打开“运行窗口”即会将程序下载到控制器, 如下图所示,在调试程序时为安全起见在“低功率”,将“速度 比例调低些。出现紧急情况时及时按停止即可停止程序
四、RC+5.4.3软件操作 (5)在“点数据”页面单击“保存”按钮,完成示教点。
四、RC+5.4.3软件操作
五、 马达重置及伺服OFF
工具 →机器人管理器→控制面板或单击工具栏 页面。如下图示
图标后,选择“控制面板”
伺服ON
Z轴刹车释放后要按住 伺服指示灯旁边白色按
钮才能手动移动Z轴
运行功率设置
四、RC+5.4.3软件操作 2、选择“控制器”单击“下一个”进入如下画面
四、RC+5.4.3软件操作
3、修改程序名称(可不修改)设定存储磁盘后,单击“下一个” 进入如下画面,然后单击“导入”即可将控制器内的程序读取出 来。
四、RC+5.4.3软件操作 三、新建一个新项目
1、单击“项目” “新建”进入如下画面,设定好项目名称 及存储磁盘后单击“确定”
四、RC+5.4.3软件操作
四、点位示教
打开步进示教页面: “工具” →“机器人管理器→“步进示教”或单击工具栏 示
图标后,选择“步进示教页面”。如下图
Mode说明:
World:在当前的局部坐标系、工具坐标系、机械手属性、ECP坐标系上,向X、Y、Z轴的方向微动动作。 如果是SCARA型机械手,也可以向U方向微动。如果是垂直6轴型机械手,则可以向U方向(倾斜)、V方 向(仰卧)、W方向(偏转)微动。 Tool : 向工具定义的坐标系的方向微动移动。 Local: 向定义的局部坐标系的方向微动移动。 Joint : 各机械手的关节单独微动移动。不是直角坐标型的机械手使用Joint模式时,显示单独的微动 按钮。 ECP : 在用当前的外部控制点定义的坐标系上,微动动作。
爱普生机器人中级培训资料

2、机器人管理器操作
5)单击“示教”进入下图画面
2、机器人管理器操作
6)单击“示教”进入下图画面,移动机械手到第二个拐点
2、机器人管理器操作
8)选择进入工作空间时对应输出为ON或OFF(输出端口设置在“设置”—“系 统配置”—“控制器”—“远程控制”—“输出”里),“示教”进入下图画 面
2、机器人管理器操作
Integer m_i ‘模块变量m_i Global (Preserve) Integer g_i ‘全局变量(全局保护变量)g_i Function main Integer I ‘局部变量i ... Fend
2、机器人管理器操作
8)单击“示教”,进入下图画面,选择“3D工具”时进入左下图所示画面,选择
“2D工具”时进入右下图所示画面,如果提示定义成功说明工具坐标已经示教好
“3D工具”第3点需要 满足以下条件
“3D工具”第3个点示教画面
“2D工具”结果
2、机器人管理器操作
9)单击“示教”,进入下图画面,示教“3D工具”第3点需要确保U=0,V=0, W=-135,用针尖对准Mark点
否则需要重新示教。
2、机器人管理器操作
2.3 LOCAL坐标示教
2.4.1 用一个原点方式示教本地坐标 1) 在机器人管理界面单击“本地坐标”打开LOCAL坐标向导画面
2、机器人管理器操作
2) 单击“本地向导”打开LOCAL坐标向导画面
2、机器人管理器操作
3) 选择您想定义的本地号码。对于[有多少点将被使用],则选择[1–原点]。 由于这是一个本地单点,您只需示教新坐标系的原点即可。如果您想使用坐标 系方向的U,V 或W 轴,勾选[用U,V,W 本地旋转工具坐标]复选框。如果未选 中此复选框,新的坐标系是从X 和Y 轴的本Local 0 进行偏移,但不会绕着轴 旋转。
爱普生培训资料:EPSON 6轴机器人

6轴机器人坐标系
1.机器人基本坐标系:以J1 法兰中心为原点, XYZ正方向如下图(右手 定则); 2.工具0坐标系:以J6法兰 中心为原点, XYZ正方向如下图,(右 手定则)。
机器人坐标系一般是固定不变的 Tool 0 坐标系是固定在第 6 关节法兰中心的 , 所以 机器人姿势变化时 Tool 0 坐标系也相应的移动 (如图)
AutoLJM(Jump3,Go,Move,Arc)最小的动作关节移动量 Go P0 LJM
AvoidSingularity(Move,Arc)自动回避特别姿势功能 AvoidSingularity=1
6轴机器人工具坐标系向导设置步骤
U = 0, V = 0, W = 180
旋转U轴一些角度(一般180度)
工具坐标系(tool坐标系)
定义:定义在工具末端的用户坐标 应用:与轨迹相关的 应用;视觉引导、 多抓手的抓取、涂胶等
本地ቤተ መጻሕፍቲ ባይዱ标系(Local坐标系)
定义:机器人坐标系的偏移(工件坐标系) 应用:一般用于承载治具上有多个工作点的应用, 以简化示教点的操作;阵列料盘的搬运,装配, 涂胶等。
指令Jump3,Go,Move
Jump3 Here :Z(100), P0 :Z(100), P0 Jump3 Here -TLZ(100), P0 -TLZ(100), P0 Jump3 Here +Z(100), P0 +Z(100), P0
Go p0 Move p0
Go XY(x0,y0,z,u,v,w)/R /A /NF /J6F0 /J4F0 /0 如果点位是自定义的,例如由视觉像素坐标转换而来,则需要指定 各个姿势的标志。一般可以先手动到目标点位置记录下各个标志,然后再 加到后面。
爱普生4轴机器人培训(PPT69页)
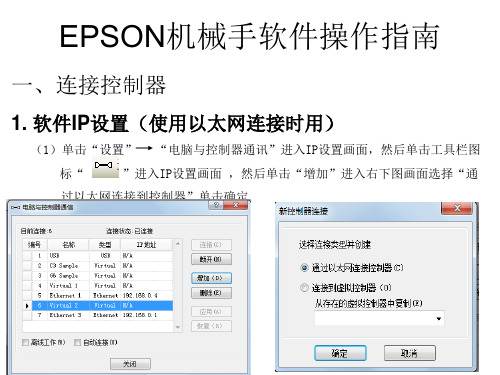
(1)单击[设置” “控制器”进入控制器设置画面,然后单击“配置” 设置控制的IP地址及控制方式,当要使用外部I/O控制时须将“控制设备”改为 远程I/O,然后单击“应用”,再单击关闭,等待控制器重启完毕后,按“F5”, 单击“激活远程I/O”后关闭软件即可使用外部I/O控制控制器。
181Leabharlann 机械手坐标系 1.1 SCARA机械手坐标系
XY方向坐标(前后左右) Z方向坐标(上下) U方向坐标(旋转)
3
一、关于机械手的基础知识
2. 机械手的手臂姿势
在使用机械手作业时,有必要使其用示教时的手臂姿势在指定的点上动作。如果不这样 做,根据手臂姿势的不同,会产生轻微的位置偏移,或朝着意想不到的路径动作的结果,有 干涉周边设备的危险。为了避免这种情况,在点数据中必须事先指定使其在此点上动作时的 手臂姿势(如下图)。此信息也也可以从程序中变更(\L或者\R)。
EPSON 机械手培训
2014-may
1
内容
一、关于机械手的基础知识 二、硬件概要 三、EPSON RC+ 用户界面 四、RC+5.4.3软件操作 五、SPEL+语言 六、动作指令 七、I/O 八、Pallet 九、!...! 并列处理 十、多任务处理 十一、循环控制指令 十二、程序实例
2
一、关于机械手的基础知识
23
四、RC+5.4.3软件操作
(5)在“点数据”页面单击“保存”按钮,完成示教点。
24
四、RC+5.4.3软件操作
5. 马达重置及伺服OFF
工具 →机器人管理器→控制面板或单击工具栏 页面。如下图示
图标后,选择“控制面板”
伺服ON
爱普生高级培训资料

2015年8月
1
内容 一、移动向下相机应用 二、固定向上相机应用 三、固定向下相机应用
2
视觉应用案例(EPSON机械手跟其他品牌视觉配合)
一、 移动向下相机应用案例(相机安装在SCARA机械手第二臂上) 1) 准备一个类似下图所示针尖工具,装到治具上
2) 准备一个类似下图所示的MARK,将MARK贴到拍照区域平面 内
19
视觉应用案例(EPSON机械手跟其他品牌视觉配合)
9)运行“cal_camera_move”函数
选择“cal_camera_move”函数, 单击“开始”运行校准函数,如果 校准成功将打印校准结果,否
则要重新校准
如果校准结果的平均偏差及最 大偏差太大(一般在0.1以内) 说明校准有问题,要重新校准
⑤单击“示教”进入下图画面,使MARK移动视野中间,记下当前MARK 像素坐标(或在屏幕上标记此位置),确保U=0。
27
视觉应用案例(EPSON机械手跟其他品牌视觉配合)
⑥记下当前MARK像素坐标后,后单击“示教”,进入如下画面
28
视觉应用案例(EPSON机械手跟其他品牌视觉配合)
⑦单击“示教”进入如下画面,使U=180,Z保持不变,然后移动X、 Y,使MARK再次回到之前标记的像素坐标位置
14
视觉应用案例(EPSON机械手跟其他品牌视觉配合)
②移动机械手X、Y使针尖对准MARK,然后将该点保持到P0点(一定要在之 前示教的针尖工具“TOOL 1”下保存P0参考点) ③将TOOL切回TOOL 0,然后再示教九宫格九点(移动向下相机九宫格九点一 定要在TOOL 0下示教)如下图所示
选择默 认模式
③在“工具”画面单击“工具向导”,进入工具向导画面,选择移动 向下工具编号,如下图所示:
手册_EPSON培训手册

12
五、SPEL+語言
4.變數的類型 變數有很多種類型,使用前先說明類型,格式為:數據類型變量名。例如: Integer i,定義變量i為整型數據。另外,代入的數據和變量的類型必須一致。在下 表中列出SPEL+ 語言中使用的數據類型。
13
六、動作指令
1. 動作指令分類
使機械手臂動作的指令叫作動作指令。 可分為:PTP動作指令,CP動作指令,Curves動作指令,Joint動作指令。
17
六、動作指令
5. 速度設定指令 5.1 PTP指令的速度設定
Speed 功能用於設定PTP動作速度的百分比 格式:Speed s,[a,b] 說明:s 速度設定值;a 第三軸上升速度設定值;b 第三軸下降速度設定值。 範例:1. Speed 80 2. Speed 80,40,30
圖2
NOTE:
1、Jump不能用於6軸機械手臂,6軸機械手臂只能使用Jump3和Jump3 CP指令 2、Jump3CP指令用法與Jump3類似,不同在於Jump3CP是3個CP動作的组合 3、SCARA機械手臂Z軸上升或下降動作時,使用Jump指令可以提高運动速度
3.4 BMove 、TMove、CVMove 指令
表1
7
二、硬體概要
系统組成圖示
8
三、EPSON RC+ 用戶界面
9
四、示教
1. 微調Jog &Teach介面
打開Jog&Teach介面: Tools →Robot Manager →Jog&Teach或點選工具檔
圖標後,選擇Jog&Teach介面。如下圖示
Mode說明:
World:在當前的局部坐標系、工具坐標系、機械手臂属性、ECP坐標系上,向X、Y、Z轴的方向微調動 作。如果是SCARA型機械手臂,也可以向U方向微動。如果是垂直6軸型機械手臂,則可以向U方向(傾 斜)、V方向(仰卧)、W方向(偏轉)微動。 Local: 向定義的局部坐標系的方向微動移動。 Tool : 向工具定義的坐標系的方向微動移動。 Joint : 各機械手臂的關節單獨微調移動。不是直角坐標型的機械手臂使用Joint模式時,顯示單獨的 微調按钮。 ECP : 在用當前的外部控制點定義的坐標系上,微調動作。
(中文)Epson机器人中文说明书
教育导入 RC90 / RC700EPSON RC+ 7.0 Rev.2RC90 / RC700 EPSON RC+ 7.0教育导入Rev.2Copyright © 2013-2014 SEIKO EPSON CORPORATION. All rights reserved.关于教材本教材的对象是控制器RC90/RC700的使用者,程序开发软件包EPSON RC+7.0的使用者,创建程序以及试校的人.注意本操作说明书不能擅自复制,转载一部分内容或者全部内容.本书所记载的内容,将来事先没有通知也有时会有变更.关于本书的内容,万一有错误,如果您有注意到的地方,麻烦联系我们.咨询本教材,以及机器人使用的相关咨询,请按以下信息联系.EPSON销售株式会社FA机器营业课〒160-8324东京都新宿区西新宿6-24-1西新宿三井大厦TEL : 03-5321-4161目录关于教材----------------------------------------------------------------------------- ii注意 ---------------------------------------------------------------------------------- ii咨询 ---------------------------------------------------------------------------------- ii第1章 1. 与机器人相关的基础知识 (1)1.1 接受机器人培训的意义 ----------------------------------------------------- 1劳动安全卫生法 ------------------------------------------------------------------------------ 1劳动安全卫生规则 --------------------------------------------------------------------------- 2安全卫生特别教育规定 --------------------------------------------------------------------- 31.2 工业机械手的定义 --------------------------------------------------------- 151.3 工业机械手的分类 --------------------------------------------------------- 15一般分类 ------------------------------------------------------------------------------------- 15从控制来分类 ------------------------------------------------------------------------------- 16从动作机构来分类 ------------------------------------------------------------------------- 161.4 关于坐标系 ------------------------------------------------------------------ 171.5 机械手坐标系 --------------------------------------------------------------- 17水平多关节型机械手 ---------------------------------------------------------------------- 17垂直多关节型机械手 ---------------------------------------------------------------------- 171.6 机械手的手臂姿势 --------------------------------------------------------- 18水平多关节型机械手 ---------------------------------------------------------------------- 18垂直多关节型机械手 ---------------------------------------------------------------------- 18特异姿势 ------------------------------------------------------------------------------------- 20特异姿势附近的PTP动作 ---------------------------------------------------------------- 20对于CP动作命令的LJM函数------------------------------------------------------------ 21特异姿势附近的CP动作(CP动作时的特异姿势通过机能) -------------------- 21第2章 2. 硬件的概要 (22)2.1 系统构成 --------------------------------------------------------------------- 222.2 控制器RC90 ----------------------------------------------------------------- 23各部分的名称和机能 ---------------------------------------------------------------------- 23LED -------------------------------------------------------------------------------------------- 25线缆的连接 ---------------------------------------------------------------------------------- 262.3 控制器RC700---------------------------------------------------------------- 28各部分的名称和机能 ---------------------------------------------------------------------- 28LED&7色LED的显示 ----------------------------------------------------- 31特殊状态的显示 ---------------------------------------------------------------------------- 32线缆的连接 ---------------------------------------------------------------------------------- 332.4 与安全相关的机能 --------------------------------------------------------- 352.5 电源的接入 ------------------------------------------------------------------ 372.6 EPSON RC+ 7.0的启动---------------------------------------------------- 37第3章 3. 软件概要 (38)3.1 EPSON RC+ 7.0的概要 ---------------------------------------------------- 383.2 设计资源管理器 ------------------------------------------------------------ 393.3 状态窗口 --------------------------------------------------------------------- 393.4 状态栏 ------------------------------------------------------------------------ 403.5 在线帮助 --------------------------------------------------------------------- 413.6 简单的程序作成和实行---------------------------------------------------- 423.7 机械手管理器 --------------------------------------------------------------- 43第4章 4. 试校 (44)4.1 控制面板 --------------------------------------------------------------------- 444.2 点动&试校-------------------------------------------------------------------- 46点动控制 ------------------------------------------------------------------------------------- 46 点动方法 ------------------------------------------------------------------------------------- 49 点动 ------------------------------------------------------------------------------------------- 50 TEACH 模式 ---------------------------------------------------------------------------------- 50 点的试校方法 ------------------------------------------------------------------------------- 50变更内容的保存/删除--------------------------------------------------------------------- 514.3 点的编集 --------------------------------------------------------------------- 52打开编辑用的点的文件 ------------------------------------------------------------------- 52 选择1行以上 ------------------------------------------------------------------------------- 53 选择所有行的话 ---------------------------------------------------------------------------- 53 定义新的点 ---------------------------------------------------------------------------------- 53 删除点 ---------------------------------------------------------------------------------------- 53点的[剪切]、[粘贴] ---------------------------------------------------------------------- 534.4程序的修正--------------------------------------------------------------------- 54第5章 5. SPEL+语言 (55)5.1 概要 --------------------------------------------------------------------------- 555.2 程序构造 --------------------------------------------------------------------- 555.3 函数名称 --------------------------------------------------------------------- 555.4 批注 --------------------------------------------------------------------------- 565.5 多陈述 ------------------------------------------------------------------------ 565.6 演算子 ------------------------------------------------------------------------ 565.7 进制 --------------------------------------------------------------------------- 575.8 变量 --------------------------------------------------------------------------- 57变量的数据型 ------------------------------------------------------------------------------- 57 变量的种类 ---------------------------------------------------------------------------------- 58 本地变量 ------------------------------------------------------------------------------------- 58 模块变量 ------------------------------------------------------------------------------------- 58 整体变量 ------------------------------------------------------------------------------------- 58 备份变量(Global Preserve) ------------------------------------------------------------ 58 变量的初期化 ------------------------------------------------------------------------------- 58 变量宣言 ------------------------------------------------------------------------------------- 59第6章 6. 动作命令 (60)6.1 动作命令 ----------------------------------------------------------------------60PTP动作命令---------------------------------------------------------------------------------60CP动作命令 ----------------------------------------------------------------------------------616轴机械手专用动作命令(PTP+CP)------------------------------------------------------626.2 速度设定命令 ----------------------------------------------------------------63PTP动作命令的速度设定------------------------------------------------------------------63CP动作命令的速度设定 -------------------------------------------------------------------64变更机械手速度的程序 --------------------------------------------------------------------656.3 Jump命令的修饰 ------------------------------------------------------------66拱形运动--------------------------------------------------------------------------------------66Z轴上限值的指定---------------------------------------------------------------------------676.4 指令窗口 ----------------------------------------------------------------------68第7章7. I/O (69)7.1 输入输出控制 ----------------------------------------------------------------697.2 输出 ----------------------------------------------------------------------------697.3 输入 ----------------------------------------------------------------------------727.4 Wait命令 ---------------------------------------------------------------------737.5 I/O 标签编辑器 -------------------------------------------------------------747.6 I/O 监视器 -------------------------------------------------------------------74第8章8. 程序的控制文 (75)For...Next-----------------------------------------------------------------------------------75If…Then…Else -----------------------------------------------------------------------------77Call--------------------------------------------------------------------------------------------79子程序-----------------------------------------------------------------------------------------79Do…Loop--------------------------------------------------------------------------------------81Print ------------------------------------------------------------------------------------------82Input ------------------------------------------------------------------------------------------82Print # ---------------------------------------------------------------------------------------83Input # ---------------------------------------------------------------------------------------83Cls ---------------------------------------------------------------------------------------------84第9章9. Pallet (85)9.1 Pallet的定义 ---------------------------------------------------------------859.2 Pallet内的位置确定 ------------------------------------------------------86 第10章10. 并列处理 (88)第11章11. 多重任务 (90)Xqt ------------------------------------------------------------------------------------ 90任务暂停,继续实行,结束 ----------------------------------------------------- 91Halt----------------------------------------------------------------------------------- 91Resume-------------------------------------------------------------------------------- 91Quit----------------------------------------------------------------------------------- 91任务管理器-------------------------------------------------------------------------- 94记忆卡I/O--------------------------------------------------------------------------- 96第12章12. 设计方案管理 (98)12.1 概要-------------------------------------------------------------------------- 98EPSON RC+ 7.0的设计方案 -------------------------------------------------------------- 98为什么需要设计方案 ---------------------------------------------------------------------- 98构成EPSON RC+ 7.0的设计方案的内容----------------------------------------------- 9812.2 新规设计方案的作成 ----------------------------------------------------- 9912.3 设计方案的设定 ----------------------------------------------------------- 9912.4 设计方案的建立 ---------------------------------------------------------- 10012.5 设计方案的复制的作成 ------------------------------------------------- 10112.6 设计方案的备份 ---------------------------------------------------------- 10112.7 设计方案的转换 ----------------------------------------------------------- 101第13章13. 远程控制 (102)13.1 概要------------------------------------------------------------------------- 10213.2 自动运转模式下的远程控制 ------------------------------------------- 10213.3 TEACH模式下的远程控制----------------------------------------------- 10313.4 遥控的程序调试 ---------------------------------------------------------- 10313.5 程序的选择---------------------------------------------------------------- 10313.6 远程输入------------------------------------------------------------------- 10413.7 远程输出------------------------------------------------------------------- 10713.8 设定远程控制软件设计 ------------------------------------------------- 110第14章14. 控制器的状态保存 (111)14.1 所谓的控制器状态保存机能 ------------------------------------------- 11114.2 在使用控制器状态保存机能之前 ------------------------------------- 111注意事项 ------------------------------------------------------------------------------------ 111可以使用的USB存储器 ------------------------------------------------------------------ 11114.3 控制器状态保存机能的使用 ------------------------------------------- 112用触发按钮保存控制器状态------------------------------------------------------------- 112控制器状态保存显示 --------------------------------------------------------------------- 112通过电子邮件的转送 --------------------------------------------------------------------- 11314.4 保存的数据的详细说明 ------------------------------------------------- 114第15章15. 模拟装置 (115)15.1 模拟装置机能------------------------------------------------------------- 115模拟装置上可执行的动作 --------------------------------------------------------------- 11515.2 模拟装置的使用方法---------------------------------------------------- 1161. 创建模拟控制器 --------------------------------------------------------------------- 1172. 设置使用的机器人 ------------------------------------------------------------------ 1183. 显示模拟画面 ------------------------------------------------------------------------ 1194. 创建程序 ------------------------------------------------------------------------------ 1195. 执行程序并操纵机器人 ------------------------------------------------------------ 12115.3 机能说明------------------------------------------------------------------- 122模拟装置画面的构成 --------------------------------------------------------------------- 122第16章Appendix ................................... A-1A-I 机器人管理器菜单 -------------------------------------------------------- A-1A-II 程序调试------------------------------------------------------------------A-34 断点的设定和解除 -----------------------------------------------------------------------A-34程序的STEP执行-------------------------------------------------------------------------A-35CALL STUCK的显示 ----------------------------------------------------------------------A-35变量的显示--------------------------------------------------------------------------------A-36 A-III 点 -------------------------------------------------------------------------A-38 点的定义-----------------------------------------------------------------------------------A-38根据点标签进行点的参照 --------------------------------------------------------------A-38根据变量进行点的参照 -----------------------------------------------------------------A-39在程序上的点 -----------------------------------------------------------------------------A-39点的保存和读入 --------------------------------------------------------------------------A-39点属性--------------------------------------------------------------------------------------A-39点坐标的取得和设定 --------------------------------------------------------------------A-41点的变更-----------------------------------------------------------------------------------A-41 A-IV 经常使用的指令---------------------------------------------------------A-42 P# (1. 定义点) --------------------------------------------------------------------------A-42P# (2. 指定点) --------------------------------------------------------------------------A-43优先工具姿势变化的加减速度的CP动作-------------------------------------------A-46SpeedR--------------------------------------------------------------------------------------A-47AccelR--------------------------------------------------------------------------------------A-47Till-----------------------------------------------------------------------------------------A-48Sense ---------------------------------------------------------------------------------------A-49CP--------------------------------------------------------------------------------------------A-50Fine-----------------------------------------------------------------------------------------A-51TmReset ------------------------------------------------------------------------------------A-52Tmr函数------------------------------------------------------------------------------------A-52Exit-----------------------------------------------------------------------------------------A-53TW函数 -------------------------------------------------------------------------------------A-53Trap(用户定义触发) --------------------------------------------------------------------A-54Trap(系统状态触发) --------------------------------------------------------------------A-57Select…Send -----------------------------------------------------------------------------A-59Inertia ------------------------------------------------------------------------------------A-60OLRate--------------------------------------------------------------------------------------A-61Align函数 -------------------------------------------------------------------------------- A-62 LJM函数 ----------------------------------------------------------------------------------- A-63 Here函数---------------------------------------------------------------------------------- A-65 RealPos函数 ----------------------------------------------------------------------------- A-65 InPos 函数 ------------------------------------------------------------------------------- A-66 Curve--------------------------------------------------------------------------------------- A-67 CVMove ------------------------------------------------------------------------------------- A-701.1.1 接受机械手培训的意义本次培训的开展是为了使客户掌握机械手的基本操作方法然而,目的不仅仅只是掌握操作手法,还在于了解机械手、排除不安全行为、能够积极地采取安全措施。
EPSON robot初级培训资料

关于机械手的基础知识
3. 机械手臂的手臂姿势
在使用机械手臂作动作时,有必要纪录使用示教点位时的手臂姿势。如果不这样 做,根据手臂姿势的不同,会产生轻微的位置偏移,或朝着意想不到的路径做动作, 会有干涉周边设备的危险。为了避免这种情况,在点位资料中必须事先指定其在该点 位上动作时的手臂姿势(如下图)。此讯息也可以从程式中变更(\L或者\R)。
动作指令
2.2 Jump 指令 功能:通过“门形动作”使手臂从当前位置移动至目标座标。 格式:Jump 目标座标 范例:
1. Jump P1 ′机械手臂以“门形动作”动作到P1点
2. Jump P1 LimZ -10 ′以限定第三轴目标座标Z=-10的门 形动作移动到P1点。 如图所示
3. Jump P1:Z(-10)LimZ -10 ′以限定第三轴木标座标Z=-10的门形动作 移动到P1点位置Z座标值为-10的位置
SPEL+中有三种不同的变量。分别爲:
Local : 本地变量 (在同一Function 内使用的变量)
Module : 模块变量(在同一程序内使用的变量)
Global : 整体变量(在同一项目内使用的变量)
Module m_i
'模块变量m_i
Global (Preserve) Integer g_i '整体变量(整体保护变量)g_i
(4)点击Teach按纽,系统自动 纪录示教点在当前坐标系的具 体数值。如果需要示教的点位 为新增点,将弹出以下对话框 ,用户可根据需要对该点编辑 标签及说明
步骤(4
(5)在Robot Manager |Points介面点击Save按钮) ,完成示教点。
SPEL+ 语言
1、概述
EPSON导入培训

表1
25
二、系统构成
硬件概要
26
二、系统构成
系统构成
感应器 IO输入 IO输出 执行机构 Nhomakorabea程序
逻辑控制
机械手 编码器
机械手 位置 视觉 交互 数据 通讯 点位 数据 机械手 伺服马达
数据
27
三、EPSON RC+ 用户界面
28
四、示教
1. 微动Jog &Teach页面
打开Jog&Teach页面: Tools →Robot Manager →Jog&Teach或单击工具栏 图标后,选择Jog&Teach页面。如下图示
22
一、关于机械手的基础知识
2. 机械手的手臂姿势
在使用机械手作业时,有必要使其用示教时的手臂姿势在指定的点上动作。否则,根据手臂 姿势的不同,会产生轻微的位置偏移,或朝着意想不到的路径动作的结果,有干涉周边设备 的危险。为了避免这种情况,在点数据中必须事先指定使其在此点上动作时的手臂姿势(如 下图)。此信息也也可以从程序中变更(\L或者\R)。
六、动作指令
1. 动作指令分类 使机械手动作的指令叫作动作指令。 可分为:PTP动作指令,CP动作指令,Curves动作指令,Joint动作指令。
类型 PTP CP
指令 Go、Jump、BGo、TGo
说明 以机械手最容易运动的方式达到目 标位置的动作命令
Move、Arc、Arc3、 机械手按指定运动轨迹到达目标位 Jump3/Jump3CP、 Bmove、 置的指令 TMove、CVMove
706mm 0.44second 4591mm/s
895mm 0.49second 4215mm/s
EPSON机械手培训-课件

学习效果评估
阶段性测验
参加阶段性测验,对自 己的学习效果进行评估 ,及时发现和弥补知识 漏洞,提高学习质量。
模拟考试与练习
参加模拟考试和练习, 熟悉考试形式、题型、 难度等,提高答题速度 和准确性。
复习巩固与拓展
定期复习巩固所学知识 ,查漏补缺,同时拓展 相关领域的知识和技能 ,提升个人综合实力。
06
《epson机械手培训-课件》 学习指南
学习目标与计划
了解课程内容和目标
详细了解《epson机械手培训-课件》的课程结构和目标,以 便明确学习方向和重点。
制定学习计划
根据自身学习情况和时间安排,制定详细的学习计划,包括 每日学习任务、学习时间分配等,以便合理高效地安排学习 时间。
学习方法与技巧
MoveIt
一个专门为机器人运动控制设计 的开源软件库,提供了直观的运 动规划框架和交互式界面
Player/…
一个经典的机器人仿真平台,提 供了多种传感器和控制器,可用 于机器人底层控制
机械手的控制方式及实现
直接控制
轨迹控制
通过发送关节角度指令来直接控制机械手的 运动
通过规划机器人末端执行器的运动轨迹来控 制机械手的运动
手术辅助
机械手在手术中具有稳定、精确的操作特点,可 用于辅助医生进行各种高难度手术。
康复治疗
机械手可以辅助患者进行康复训练,如肢体康复 、肌肉训练等。
医疗应用
在医疗领域,机械手还被广泛应用于样品采集、 药物分发、消毒等工作。
机械手在其他领域的应用优势
服务业
在服务业中,机械手可以进行各种任务,如餐厅传菜、快递配送 、酒店服务等工作。
定位与姿态调整
机械手通过各部件的协调动作,将 物体移动到指定位置,并调整物体 的姿态。
EPSON机器人视觉培训

控制器及系统构成
PV1系统组成
单个相机 多个相机
PV1
Ethernet (支持USB)
PC*(1)
Ethernet
Giga Ethernet
GigE Camera
PoE Injector
*(1): RC+ needed to be running.
PV1
Ethernet (支持USB)
PC*(1)
▫ 校准:需要复杂的校准步骤
EPSON的解决方案——Vision Guide 7.0
• EPSON Vision Guide,有效解决您的困扰!
其他视觉
需要复杂的 视觉知识
通讯控制复杂
校准麻烦 步骤复杂
EPSON Vision Guide
简便易用 快速上手
无需通讯程序
向导指示 自动校准
Vision Guide 7.0——便捷易用
Fend
编程实例
——经典运用
Jump P0
‘运动到拍照位置
Wait 0.1
‘稳定位置
VRun test
‘执行图像序列
VGet test.Geom01.RobotXYU, found, x, y, u ‘获取结果
If found = True Then
‘如果找到结果
Jump XY(x, y, -50, u) /R
EPSON视觉 培训资料
内容
1、参考资料:(用户指南手册) 2、相机基本知识 3、爱普生视觉组件 4、相机安装和校准 5、视觉序列建立 6、第三方相机兼容
参考资料
RC软件帮助文档: 爱普生视觉指南软件参考 爱普生视觉指南硬件参考 爱普生视觉指南属性和结果参考
相机基本知识
EPSON ROBOT 导入培训
EPSON ROBOT 导入培训EPSON ROBOT 导入培训⒈概述本培训旨在介绍如何使用 EPSON 系统进行导入操作。
通过本培训,您将了解如何正确设置和使用系统,以进行高效的导入任务。
⒉系统要求在开始导入培训之前,请确保满足以下系统要求:●EPSON 系统(包括控制器、臂、传感器等)●PC 或控制台连接系统●适当的操作软件和驱动程序●具备基本的编程和操作知识⒊操作前准备在进行导入任务之前,您需要进行以下操作前准备:⑴系统设置●安装控制器,并将其与臂和传感器连接。
●安装适当的驱动程序和软件,并确保它们与系统兼容。
●对系统进行必要的校准和调试,确保其正常运行。
⑵数据准备在进行导入任务之前,您需要准备以下数据:●导入文件:将要导入到系统中的文件,可以是 CAD 文件、程序文件等。
●导入参数:设置导入过程中的参数,如坐标系、单位等。
⒋导入操作以下是进行导入操作的步骤:⑴打开软件启动控制软件并登录到系统。
⑵创建新项目创建一个新的项目,命名为“导入任务”。
⑶导入文件选择要导入的文件,并将其加载到系统中。
根据文件类型和需求,选择合适的导入选项和参数。
⑷设置导入参数根据导入文件和任务要求,设置合适的导入参数。
这包括坐标系选择、单位设置等。
⑸预览导入结果在进行实际导入之前,预览导入结果。
检查坐标位置、姿态、路径等是否正确。
⑹执行导入操作确认导入参数和预览结果无误后,执行导入操作。
系统将根据设置将文件导入到系统中。
⑺验证导入结果导入完成后,验证导入结果是否与预期一致。
检查系统中的位置、路径等是否正确。
⒌常见问题解答以下是一些常见问题及其解答,以帮助您更好地理解导入操作:⑴为什么导入结果与预期不符?可能是导入参数设置有误,或者文件本身存在问题。
请检查导入参数和文件,并重新执行导入操作。
⑵如何处理导入失败的情况?导入失败可能是由于文件格式不支持或文件损坏。
请确保文件格式正确,并尝试使用其他文件进行导入。
⒍附件本文档涉及的附件包括:●EPSON 系统操作手册●控制软件安装包●示例导入文件⒎法律名词及注释在本文档中有以下法律名词及注释:●:按照 ISO 8373 标准,是可编程的多功能操作设备,可以自动执行一系列任务或操作。
爱普生培训资料:EPSON RC+模拟器培训

检测有无碰撞 检测有无自碰撞
10
二.仿真器窗口布局
布局控件: 所有对象都有公共属性,其他则用于特定对象。 以盒子控件为例:
名称,可修改 位置,控件摆放的位置
一半的尺寸,指定离中心的长度。
旋转,对象角度(Z 轴定心)
颜色 可见的 显示标签 检测有无碰撞
11
二.仿真器窗口布局
(4).3维显示 在3 维显示器中,您可以从各个视角检查机器人的方向和运动。 添加布局控件 → 添加布局控件时,同时 → 在[布局控件]中选中机器 → 人控件,它将被添加为 独立对象。
13
二.仿真器窗口布局
移动机器人的关节 若要移动机器人关节,按下<Ctrl>键 并拖动机器人关节。选择的关节显示 为蓝色。 如果机器人移动到动作范围之外的某 个点,则关节会返回到以前那个点上。
检查碰撞 当机器人和布局控件之间检测到碰 撞,相碰撞 的机器人关节和布局控件则以红色 显示。 (此时将机械手移动至非碰撞区域,点 击工具栏上方的重置图标 )
7
二.仿真器窗口布局
重置碰撞
模拟器设置
重置碰撞检测状态。 点击这个按钮的同时机器人不会干扰任何布局控 件,红色显示变为正常。 显示[模拟器设置]对话框。
截屏 输出视频
经过时间
清除经过时间 清除末端夹具路径
将当前3 维显示保存为图像文件。 出现一个对话框,可指定文件名和格式,然后再 进行保存。 在回放模式下播放模拟结果(日志文件),并保 存到影片文件中。出现一个对话框,可指定文件 名和格式,然后保存。 显示程序的执行时间,就如同您是在用一个真正 的控制器运行同一个程序。 程序启动时,经过时间计数器是在程序完成时从 0 到停止开始计数的。 它在程序暂停时暂停计数,继续执行时 恢复。 重置经过时间。 清除机器人显示的夹具末端路径。
EPSON机器人培训教程

03
机器人运动控制指 令详解
04
调试工具使用及常 见问题排查
高级功能与应用实例
01
02
机器人视觉系统配置与调试
复杂轨迹规划与实现
03
04
多机器人协同作业配置
机器人与外部设备通信
故障诊断与维护保养
常见故障现象与原因分析 机器人日常维护保养项目
故障诊断方法与步骤 预防性维护计划制定与执行
05
EPSON机器人行业应用案例
EPSON机器人培训教程
目录
• EPSON机器人概述 • EPSON机器人硬件组成 • EPSON机器人软件编程 • EPSON机器人操作实践 • EPSON机器人行业应用案例 • EPSON机器人未来发展趋势
01
EPSON机器人概述
Chapter
EPSON机器人发展历程
1980年代
EPSON开始研发工业机器人,推出首 款SCARA机器人。
数据处理
EPSON机器人可以接收和处理各种传感器数据,如位置、速度、加速度等。通过数据滤波、融合等技术,提高数据的准 确性和可靠性。同时,可以使用数据结构(如数组、列表、字典等)存储和管理数据。
算法应用
根据具体需求,选择合适的算法进行实现,如路径规划、轨迹跟踪、图像识别等。可以使用现有的算法库或自定义算法, 注意算法的实时性和准确性要求。
执行器
机器人的执行器主要包括电机、减速器等,用于将 控制器的指令转化为实际的运动。EPSON机器人 通常采用高精度、高效率的伺服电机,确保运动的 准确性和稳定性。
传感器与感知系统
传感器
EPSON机器人配备了多种传感器,如 位置传感器、速度传感器、力传感器 等,用于实时监测机器人的状态和环 境信息。
EPSON软件基本操作与培训

2、机器人管理器操作
2.2.2 点位示教步骤 1) 单击“示教点”,选择要示教的点文件
单击”示教点 “
选择要示教的点文件
2、机器人管理器操作
2) 微动将机械手移动的需要示教点的位置。如果是SCARA机械手,Motor On情 况下,可以在“控制面板”页面,单击“释放所有”释放所有轴后,手动将机 械手移动需要示教点的位置后,单击“锁定所有”锁定所有轴。选择要示教的 点位,单击“示教”
选择本地坐标编 号
选择3-原点,X,Y
2、机器人管理器操作
4) 选好本地坐标编号和示教方式后,单击“下一个”,进入下图画面
2、机器人管理器操作
5) 单击“示教”,进入下图示教画面,移动X、Y使治具末端对准本地坐标原 点
2、机器人管理器操作
6) 单击“示教”,进入示教画面,移动X、Y使治具末端对准本地坐标X轴上一 个点
错误的那一行去,然后 修改程序后重新下载程序
1、控制器操作
1.6.1 设置控制器参数 1)设置控制器IP地址 单击“设置”,选择“系统配置”进入左下图画
面。单击“控制器”选择“配置” 进入右下图画面。设置好控制器IP地址后,单击
“应用”,单击“关闭”,如果提 示重置控制器,单击“确定”
1、控制器操作
1.6.2 设置控制器参数 2)修改I/O设置 单击“设置”,选择“系统配置”,单击“控制
EPSON软件基本操作与培训
内容
1
控制器操作
1.1 通过USB连接控制器 1.2 通过以太网连接控制器 1.3 从控制器读取程序 1.4 将程序下载到控制器 1.5 控制器参数备份及恢复 1.6 设置控制器参数
1.6.1 设置控制器IP地址 1.6.3 修改I/O设置 1.7 设置控制器远程控制模式 1.8 重置控制器
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
程式範例:
3. 變數
MAIN.PRG Function Main Call Func1 ... Fend Function Func1 Jump pickpnt ...
Integer m_i ‘模組變數m_i Global (Preserve) Integer g_i ‘全局變數(全局保護變數)g_i Function main Integer I ‘局部變數i ... Fend ‘局部變數i
2.1 Go 指令
功能:全軸同時的PTP動作,動作的軌跡是各關節分别對從當前的點到目標座標進行差補。 格式:Go 目標座標 範例: 1. Go P1 ´機械手臂動作到P1點 2. Go XY(50, 400, 0, 0) ´機械手臂動作到X=50,Y=400,Z=0,U=0 3. Go P1+X(50) ´機械手臂動作到P1點X坐標值偏移量為+50的位置 4. Go P1:X(50) ´機械手臂動作到P1點對應X座標值為50的位置
4.變數的類型 變數有很多種類型,使用前先說明類型,格式為:數據類型變量名。例如: Integer i,定義變量i為整型數據。另外,代入的數據和變量的類型必須一致。在下 表中列出SPEL+ 語言中使用的數據類型。
13
六、動作指令
1. 動作指令分類 使機械手臂動作的指令叫作動作指令。 可分為:PTP動作指令,CP動作指令,Curves動作指令,Joint動作指令。
Bmove: 在指定的局部座標系(Local)上執行偏移直線差補動作。没有指定局部座標系時,以局部0(基準座標 系)為基準,進行偏移PTP 動作。 Tmove; 在當前的工具座標系上執行偏移直線插補動作。 CVMove: 用Curve 命令執行定義的自由曲線CP 動作。CVMove 執行設定控制器硬盤上的文件名的文件數據的 自由曲線CP 動作。此文件必須事先用Curve 命令制作。 > Curve “mycurve”, O, 0, 4, P1, P2, On 2, P(3:7) ´設定自由曲線 > Jump P1 ´用直線將手臂移動至P1 > CVMove “mycurve” ´用定義的自由曲線“mycurve”移動手臂
NOTE:
即使目標座標在機械手臂的動作範圍内,一旦在Move或Arc運動軌跡超過允許動作範圍外,機械手臂會突然停止, 给伺服馬達帶來撞擊,有產生故障的危險。為了防止這样的事發生,請在高速執行前先以低速進行動作範圍確認。
16
六、動作指令
3.3 Jump3/Jump3CP指令
功能:將手臂用3 维门形動作移動。Jump3是兩個CP動作與1個PTP動作的组合 格式:Jump3 退避座標,接近開始座標,目標座標 範例:Jump3 P1,P2,P3´從當前位置經過保存座標P1,接近座標P2運動到目標座標P3。如圖2所示
3.1 Move 指令
功能:以直線軌跡將機械手臂從當前位置移動到指定目標位置。全關節同時啟動,同時停止。 格式:Move 目標坐標 範例:Move P1 ´機械手臂以直線軌跡動作到P1點
NOTE:
Move與Go的區别:到達目標點時,對於手臂的姿勢擺放位置比較在意時使用Go命令,然而對於動作中的手臂軌 跡比較著重時使用Move 命令。在SCARA機械手臂只有Z軸上下動作時,Go與Move的軌跡一样。
表1
7
二、硬體概要
系统組成圖示
8
三、EPSON RC+ 用戶界面
9
四、示教
1. 微調Jog &Teach介面
打開Jog&Teach介面: Tools →Robot Manager →Jog&Teach或點選工具檔 圖標後,選擇Jog&Teach介面。如下圖示
Mode說明:
World:在當前的局部坐標系、工具坐標系、機械手臂属性、ECP坐標系上,向X、Y、Z轴的方向微調動 作。如果是SCARA型機械手臂,也可以向U方向微動。如果是垂直6軸型機械手臂,則可以向U方向(傾 斜)、V方向(仰卧)、W方向(偏轉)微動。 Local: 向定義的局部坐標系的方向微動移動。 Tool : 向工具定義的坐標系的方向微動移動。 Joint : 各機械手臂的關節單獨微調移動。不是直角坐標型的機械手臂使用Joint模式時,顯示單獨的 微調按钮。 ECP : 在用當前的外部控制點定義的坐標系上,微調動作。
14
六、動作指令
2. PTP指令
包括指令:Go、Jump、BGo、TGo PTP(Pose To Pose)動作,是與其動作軌跡無關,以機械手臂的工具頂端為目標位置使其動作的動作方法。 PTP動作,使用各關節上配置的電動機,使機械手臂通過最短的路徑到達目標位置。 優點:運動速度快,缺點:運動軌跡無法預測。指定PTP動作速度和加/减速,使用SPEED指令和ACCEL指令。
1、機械手臂座標系統 1.1 SCARA機械手臂座標系統
XY方向座標(前後左右)
Z方向座標(上下)
U方向座標(旋轉)
3
一、關于機械手臂的基本知識
1.2 垂直6軸型機械手臂的坐標系統
4
一、關于機械手臂的基本知識臂作動作時,有必要紀錄使用示教點位時的手臂姿势。如果不這樣做,根 據手臂姿势的不同,會產生輕微的位置偏移,或朝著意想不到的路徑做動作,會有干涉周邊 設備的危險。為了避免這種情况,在點位資料中必須事先指定其在該點位上動作時的手臂姿 勢(如下圖)。此訊息也可以從程式中變更(\L或者\R)。
15
六、動作指令
3. CP指令
包括指令:Move、Arc、Arc3、Jump3/Jump3CP、BMove、TMove、CVMove CP(Continuous Path )指令可以指定機械手臂到達目標位置的運動軌跡。 優点:軌跡可以控制,均速動作。缺点:速度慢。 指定Linear動作速度和加/减速度,使用SPEEDS指令和ACCELS指令。
EPSON 機械手臂導入培訓
台灣愛普生 FA 營業本部 2011年2月12日
1
内容
一、關於機械手臂的基本知識 二、硬體概要 三、EPSON RC+ 用户界面 四、示教 五、SPEL+語言 六、動作指令 七、I/O 八、Pallet 指令 九、!...! 並列處理 十、多任務處理
2
一、關于機械手臂的基本知識
10
四、示教
2. 示教點步驟
(1)在Points介面Points Files下拉選單中選擇需要教點的點文件 (2)在Jog&Teach介面右下角位置選擇需要示教的點編號
(3)微調將機械手臂移動到需要示教點的位置。如果是SCARA機 械手臂,Motor On情况下,可以在Control Panel 介面Free All釋放所有軸brake後,手動将機械手臂移動到需要示教的位 置後,Lock ALL鎖定所有軸。 (4)點擊Teach按紐,系统自動紀錄示教點在當前坐標系的具體 數值。如果需要示教的點位為新增點,將彈出以下對話框,用 户可根據需要對該點編輯標籤及說明 (5)在Robot Manager |Points介面點擊Save按钮,完成示教点。
圖2
NOTE:
1、Jump不能用於6軸機械手臂,6軸機械手臂只能使用Jump3和Jump3 CP指令 2、Jump3CP指令用法與Jump3類似,不同在於Jump3CP是3個CP動作的组合 3、SCARA機械手臂Z軸上升或下降動作時,使用Jump指令可以提高運动速度
3.4 BMove 、TMove、CVMove 指令
2.2.2 也可以在程式中指定機械手臂的姿勢,記述為“/” 與後面的L(左手姿勢)或R(右手姿勢)、A(上肘姿勢) 或B(下肘姿勢)、F(手腕翻轉姿勢)或NF(手腕非翻轉 姿勢)。手臂姿勢有以下8中组合,如表1所示,但因點而 異,並非所有的组合都可以動作。 垂直6軸型的機械手臂在第4關節、第6關節同軸的點上,即 使將第4關節、第6關節旋轉360度,也可以實現相同的位置 姿勢。作為用于區别像這樣點的點属性,有J4Flag和 J6Flag。指定J4Flag時,請記述斜槓(/)和其後的J4F0 (-180<J4關節角度<=180)、或J4F1(J4關節角度<= -180 或180 < J4關節角度)。指定J6Flag時,請記述斜槓(/) 和其后的J6F0 (-180<J6關節角度<=180)、或J6F1 (360 < J6關節角度<= -180 或180 < J6關節角度<= 360 )、 或J6Fn(-180*(n+1) < J6關節角度<= 180*n 或180*n < J6關節角度<= 180*(n+1))。
Function Func1 SPEL+中有3種不同範圍的變數。 Integer I • Local : 局部變數(用在同一Function内使用的變數) ... • Module : 模組變數(在同一程式内使用的變數) Fend • Global : 全局變數(在同一專案内使用的變數)
12
五、SPEL+語言
3.2 Arc和Arc3 指令
功能:Arc 在XY平面上以圓弧插補動作。 Arc3 在3D空間裡以圓弧插補動作。 格式:Arc 經過座標,目標座標 說明:將機械手臂從當前位置移到目標座標,通過中繼座標用圓弧插補動作活動時使用。從所给的3點(當前座 標座標、中繼座標、目標座標)自動演算圓弧插補軌道,並沿著此軌道移動機械手臂直至目標座標為止。 範例:Arc P2,P3
2.2 Jump 指令
功能:通過“门形動作”使手臂從當前位置移動至目標座標。 格式:Jump目標座標 範例: 图1 1. Jump P1 ´機械手臂以“门形動作”動作到P1点 2. Jump P1 LimZ -10 ´以限定第三軸目標座標Z=-10的门形動作移動到P1點,如圖1所示 3. Jump P1:Z(-10)LimZ -10 ´以限定第三軸木標座標Z=-10的门形動作移動到P1點位置Z座標值為-10的位置 NOTE: Jump與Go的區别:Jump與Go都是使機械手臂用PTP動作移动的命令。但是Jump有Go没有的一個功能。Jump将 機械手臂的手部先抬起至LimZ 值,然後使手臂水平移動,快要到目標座標上空的時候使其下降移动。此動作的 標準是可以更准確地避開障礙物物一點,更重要的是通過吸附、配置動作,提高作業的周期時間。