图像的腐蚀和膨胀
《图像处理》实验8:二值图像膨胀、腐蚀
二值图像膨胀、 二值图像膨胀、腐蚀实验步骤
BYTE* TempData=new BYTE[linebytes*infoheader->biHeight]; memset(TempData,0,linebytes*infoh eader->biHeight); //开辟临时空间,存放数据 开辟临时空间, 开辟临时空间
实验八 二值图像膨胀、 二值图像膨胀、腐蚀
矿大信电学院 蔡利梅
一、实验目的
掌握二值图像膨胀、 掌握二值图像膨胀、腐蚀的基本方法 编程实现膨胀、 编程实现膨胀、腐蚀
二、实验原理
膨胀 腐蚀
二值图像膨胀、 二值图像膨胀、腐蚀实验步骤
打开应用程序Clm 打开应用程序 修改程序菜单 添加“二值图像处理”下拉菜单, 添加“二值图像处理”下拉菜单,并添加下 一级子菜单“膨胀” 一级子菜单“膨胀”,ID:ID_DILATION, : , 添加子菜单“腐蚀” 添加子菜单“腐蚀”,ID:ID_EROSION : 创建菜单项“膨胀” 腐蚀” 创建菜单项“膨胀” 、“腐蚀”的消息响 应函数OnDilation() 、OnErosion()。(基 。(基 应函数 。( 于CClmDoc类) 类
二值图像膨胀、 二值图像膨胀、腐蚀实验步骤
switch(nbtype) { case 0: nbw=1; nbh=3; break; case 1: nbw=3; nbh=1; break; case 2: nbw=3; nbh=3; break; case 3: nbw=5; nbh=5; break; }
二值图像膨胀、 二值图像膨胀、腐蚀实验步骤
BYTE* TempData=new BYTE[linebytes*infoheader->biHeight]; memset(TempData,255,linebytes*infohe ader->biHeight); //开辟临时空间,存放数据 开辟临时空间, 开辟临时空间
C++图像的膨胀和腐蚀
C++图像的膨胀和腐蚀二值图像是一种简单的图像格式,它只有两个灰度级,即"0"表示黑色的像素点,"255"表示白色的像素点,至于如何从一幅普通的图像获得二值图像,请参考我近期在天极网上发表的《Visual C++编程实现图像的分割》一文。
二值图像处理在图像处理领域占据很重要的位置,在具体的图像处理应用系统中,往往需要对于获得的二值图像再进一步进行处理,以有利于后期的识别工作。
二值图像处理运算是从数学形态学下的集合论方法发展起来的,尽管它的基本运算很简单,但是却可以产生复杂的效果。
常用的二值图像处理操作有许多方法,如腐蚀、膨胀、细化、开运算和闭运算等等。
本文对这些内容作些研究探讨,希望对爱好图像处理的朋友有所帮助。
一、腐蚀和膨胀形态学是一门新兴科学,它的用途主要是获取物体拓扑和结果信息,它通过物体和结构元素相互作用的某些运算,得到物体更本质的形态。
它在图像处理中的应用主要是:1.利用形态学的基本运算,对图像进行观察和处理,从而达到改善图像质量的目的;2.描述和定义图像的各种几何参数和特征,如面积,周长,连通度,颗粒度,骨架和方向性。
限于篇幅,我们只介绍简单二值图像的形态学运算,对于灰度图像的形态学运算,有兴趣的读者可以看有关的参考书。
二值图像基本的形态学运算是腐蚀和膨胀,简单的腐蚀是消除物体的所有边界点的一种过程,其结果是使剩下的物体沿其周边比原物体小一个像素的面积。
如果物体是圆的,它的直径在每次腐蚀后将减少两个像素,如果物体在某一点处任意方向上连通的像素小于三个,那么该物体经过一次腐蚀后将在该点处分裂为二个物体。
简单的膨胀运算是将与某物体接触的所有背景点合并到该物体中的过程。
过程的结果是使物体的面积增大了相应数量的点,如果物体是圆的,它的直径在每次膨胀后将增大两个像素。
如果两个物体在某一点的任意方向相隔少于三个像素,它们将在该点连通起来。
下面给出具体的实现腐蚀和膨胀的函数代码:////////////////////////////////二值图像腐蚀操作函数BOOL ImageErosion(BYTE *pData,int Width,int Height){//pData为图像数据的指针,Width和Height为图像的宽和高;BYTE* pData1;int m,n,i,j,sum,k,sum1;BOOL bErosion;if(pData==NULL){AfxMessageBox("图像数据为空,请读取图像数据");return FALSE;}//申请空间,pData1存放处理后的数据;pData1=(BYTE*)new char[WIDTHBYTES(Width*8)*Height];if(pData1==NULL){AfxMessageBox("图像缓冲数据区申请失败,请重新申请图像数据缓冲区");return FALSE ;}memcpy(pData1,pData,WIDTHBYTES(Width*8)*Height);for(i=10;i<Height-10;i++)for(j=32;j<Width-32;j++){bErosion=FALSE;sum=*(pData+WIDTHBYTES(Width*8)*i+j);if(sum==255){//求像素点八邻域的灰度均值;for(m=-1;m<2;m++){for(n=-1;n<2;n++){sum1=*(pData+WIDTHBYTES(Width*8)*(i+m)+j+n);if(sum1==0){*(pData1+WIDTHBYTES(Width*8)*i+j)=0;bErosion=TRUE;break;}}if(bErosion){bErosion=FALSE;break;}}}}memcpy(pData,pData1,WIDTHBYTES(Width*8)*Height); return TRUE;}////////////////////////////////////二值图像的膨胀操作BOOL ImageDilation(BYTE *pData,int Width,int Height){BYTE* pData1;int m,n,i,j,sum,k,sum1;BOOL bDilation;if(pData==NULL){AfxMessageBox("图像数据为空,请读取图像数据");return FALSE;}//申请空间,pData1存放处理后的数据;pData1=(BYTE*)new char[WIDTHBYTES(Width*8)*Height];if(pData1==NULL){AfxMessageBox("图像缓冲数据区申请失败,请重新申请图像数据缓冲区");return FALSE ;}memcpy(pData1,pData,WIDTHBYTES(Width*8)*Height);for(i=10;i<Height-10;i++)for(j=32;j<Width-32;j++){bDilation=FALSE;sum=*(pData+WIDTHBYTES(Width*8)*i+j);if(sum==0){//求像素点八邻域的灰度值;for(m=-1;m<2;m++){for(n=-1;n<2;n++){sum1=*(pData+WIDTHBYTES(Width*8)*(i+m)+j+n);if(sum1==255){*(pData1+WIDTHBYTES(Width*8)*i+j)=255;bDilation=TRUE;break;}}if(bDilation){bDilation=FALSE;break;}}}}memcpy(pData,pData1,WIDTHBYTES(Width*8)*Height);return TRUE;}从上面的说明可以看出,腐蚀可以消除图像中小的噪声区域,膨胀可以填补物体中的空洞。
图像的腐蚀和膨胀
图像的腐蚀和膨胀研究背景和意义依据数学形态学集合论方法发展起来的图像处理方法,在数字图像处理和机器视觉领域中得到了广泛的应用,形成了一种独特的数字图像分析和理论。
数学形态学是图像处理和模式识别领域的新方法,其基本的思想是:用具有一定形态的结构元素去度量和提取图像中的对应形状,已达到图像分析和识别的目的。
优势有一下几点:有效滤除噪声,保留图像中原有信息,算法很容易用并行处理方法有效实现,基于数学形态学的边缘信息提取处理优于基于微分运算的边缘提取算法,提取的边缘比较平滑,提取的图像骨架也比较连续,断点很少。
二.原理特殊领域运算形式——结构元素,在每个像素位置上与二值图像对应的区域进行特定的逻辑运算。
运算结果是输出图像的相应像素。
运算效果取决于结构元素大小、内容以及逻辑运算性质。
结构元素:膨胀和腐蚀操作的最基本组成部分,用于测试输出图像,通常要比待处理的图像小的多。
二维平面结构元素由一个数值为0或1的矩阵组成。
结构元素的原点(锚点)指定了图像中需要处理的像素范围,结构元素中数值为1的点决定结构元素的领域像素在进行膨胀或腐蚀操作时是否需要参与计算。
常见的形态学运算有腐蚀和膨胀两种:腐蚀:删除对象边缘某些像素。
膨胀:给图像中的对象边缘添加像素。
三.算法及效果图膨胀算法:用3X3的结构元素扫描图像的每一个像素,用结构元素与其覆盖的二值图像做“与”操作,如果都为0,结果图像的该像素点为0,否则为1。
膨胀算法的效果是使二值图像扩大一圈。
腐蚀的算法:用3X3的结构元素,扫描图像的每一个像素点,用结构元素与其覆盖的二值图像做“与”操作,如果结果都为1,结果图像的该像素点为1,否则为0。
膨胀算法的结果:是二值图像减少一圈。
四.组合使用效果先腐蚀后膨胀的过程:利用它可以消除小物体,在纤细点处分离物体,平滑较大物体边界,但同时并不会明显改变原来物体的面积。
先膨胀后腐蚀的过程:利用它可以填充物体内细小空洞,连接临近物体、平滑其边界,但同时并不会明显改变原来物体的面积。
OpenCV图像的腐蚀与膨胀

《OpenCV图像处理》---上机实验报告 31.实验题目:腐蚀与膨胀操作2.实验目的:(1)如何使用opencv提供的两种最基本的形态学操作,腐蚀与膨胀;(2)掌握opencv运行环境及腐蚀与膨胀的基本运行过程。
3.实验原理:(1)形态学操作:形态学操作就是基于形状的一系列图像处理操作,通过将结构元素作用于输入图像来产生输出图像。
基本的形态学操作有腐蚀与膨胀,他们的应运广泛:消除噪声,分割独立的图像元素,以及连接相邻的元素;寻找图像中明显的极大值区域或极小值区域。
(2)膨胀:此操作将图像A与任意形状的内核(B),通常为正方形或圆形,进行卷积;内核有一个可定义的锚点,通常定义为内核中心点;进行膨胀操作时,将内核B画过图像,将内核B覆盖区域的最大像素值提取,并代替锚点位置的像素。
显然这一最大化操作会导致图像中的亮区开始“扩展”。
(3)腐蚀:它在形态学操作家族里是膨胀操作的孪生姐妹。
它提取的是内核覆盖下的像素最小值;进行腐蚀操作时,将内核B画过图像,将内核B覆盖区域的最小像素值提取,并代替锚点位置像素,腐蚀操作的结果是图片亮区变细,黑色区域变大。
4.实验结果:5.源程序:#include<stdafx.h>#include<opencv2/imgproc/imgproc.hpp> #include<opencv2/highgui/highgui.hpp> #include<highgui.h>#include<stdlib.h>#include<stdio.h>using namespace std;using namespace cv;Mat src,erosion_dst,dilation_dst;int erosion_elem=0;int erosion_size=0;int dilation_elem=0;int dilation_size=0;int const max_elem=2;int const max_kernel_size=21;void Erosion(int ,void*);void Dilation(int ,void*);int main(int argc,char** argv){src=imread("na.jpg");if(!src.data){return -1;}namedWindow("Erosion Demo", CV_WINDOW_AUTOSIZE );namedWindow("Dilation Demo", CV_WINDOW_AUTOSIZE );cvMoveWindow("Dilation Demo",src.cols,0);createTrackbar("Element:\n0:Rect\n1:Cross\n2:Ellipse","E rosion Demo",&erosion_elem,max_elem,Erosion);createTrackbar("Kernel size:\n 2n +1","Erosion Demo", &erosion_size,max_kernel_size,Erosion);createTrackbar("Element:\n0:Rect\n1:Cross\n2:Ellipse","Dila tion Demo",&dilation_elem,max_elem,Dilation);createTrackbar("Kernel size:\n 2n +1","Dilation Demo",&dilation_size,max_kernel_size,Dilation);Erosion(0,0);Dilation(0,0);waitKey(0);return 0;}void Erosion(int,void*){int erosion_type;if(erosion_elem==0){erosion_type=MORPH_RECT;}else if(erosion_elem==1){erosion_type=MORPH_CROSS;}else if(erosion_elem==2){erosion_type=MORPH_ELLIPSE;} Matelement=getStructuringElement(erosion_type,Size(2*erosion_s ize+1,2*erosion_size+1),Point(erosion_size,erosion_size));erode(src,erosion_dst,element);imshow("Eerosion Demo",erosion_dst);}void Dilation(int,void*){int dilation_type;if(dilation_elem==0){dilation_type=MORPH_RECT;}else if(dilation_elem==1){dilation_type=MORPH_CROSS;} else if(dilation_elem==2){dilation_type=MORPH_ELLIPSE;} Matelement=getStructuringElement(dilation_type,Size(2*dilation _size+1,2*dilation_size+1),Point(dilation_size,dilation_size));erode(src,dilation_dst,element);imshow("Dilation Demo",dilation_dst);}实验总结:通过本次实验,我再一次学到了一种图像处理的方法,了解并使用OpenCV提供的两种最基本的形态学操作,腐蚀与膨胀及腐蚀和膨胀的基本原理,学习对输入的图片进行腐蚀(Erosion)和膨胀(Dilation)操作,我熟悉了对图片的腐蚀与膨胀的的操作和具体代码,写代码期间遇到过很多问题,通过查阅书籍和资料都一一改正了过来,总之,代码还是不太熟悉,还有待于进一步提高。
腐蚀膨胀算法详细解释
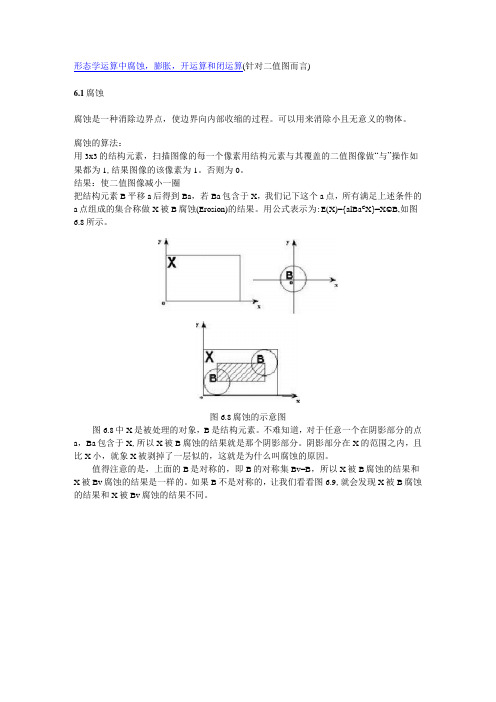
形态学运算中腐蚀,膨胀,开运算和闭运算(针对二值图而言)6.1腐蚀腐蚀是一种消除边界点,使边界向内部收缩的过程。
可以用来消除小且无意义的物体。
腐蚀的算法:用3x3的结构元素,扫描图像的每一个像素用结构元素与其覆盖的二值图像做“与”操作如果都为1,结果图像的该像素为1。
否则为0。
结果:使二值图像减小一圈把结构元素B平移a后得到Ba,若Ba包含于X,我们记下这个a点,所有满足上述条件的a点组成的集合称做X被B腐蚀(Erosion)的结果。
用公式表示为:E(X)={alBa C X}=X©B,如图6.8所示。
图6.8腐蚀的示意图图6.8中X是被处理的对象,B是结构元素。
不难知道,对于任意一个在阴影部分的点a,Ba包含于X,所以X被B腐蚀的结果就是那个阴影部分。
阴影部分在X的范围之内,且比X小,就象X被剥掉了一层似的,这就是为什么叫腐蚀的原因。
值得注意的是,上面的B是对称的,即B的对称集Bv=B,所以X被B腐蚀的结果和X被Bv腐蚀的结果是一样的。
如果B不是对称的,让我们看看图6.9,就会发现X被B腐蚀的结果和X被Bv腐蚀的结果不同。
y图6.9结构元素非对称时,腐蚀的结果不同图6.8和图6.9都是示意图,让我们来看看实际上是怎样进行腐蚀运算的。
在图6.10中,左边是被处理的图象X (二值图象,我们针对的是黑点),中间是结构元素B ,那个标有origin 的点是中心点,即当前处理元素的位置,我们在介绍模板操作时也有过类似的概念。
腐蚀的方法是,拿B 的中心点和X 上的点一个一个地对比,如果B 上的所有点都在X 的范围内,则该点保留,否则将该点去掉;右边是腐蚀后的结果。
可以看出,它仍在原来X 的范围内,且比X 包含的点要少,就象X 被腐蚀掉了一层。
o Q Q Q o & QO Qo Q o O oooo o o o o o 0- 0 O 0 o o •• • ■ Oo o oo o o 0 o o o o o 0 0 o o o ••o o o oo o o o ■ ■ o o 0 0 o o o ••o 0 0 oo o o 0 ■ • ♦ o QQ Q ■0 0 & o Q Q Q 0 0 * * 0 0 0 O 0 0 • ♦ ♦■ 0 Q Q ◎ 00o o ■ •0 0 o O ■ ■ ■ ■ *« O Q Qo o■ ■ ■ ■ Q Q c- O■ * ■ o GO O O O o o •o o ■ •• ■ o o o o O oO ■ ■ ■o 0o O O o O ♦<Q 0■••■ o a o o O o O o o 0 0 o 0oO o oooo\>o0 00o o o o 0 0 0'originFEX e 6图6.10腐蚀运算 图6.11为原图,图6.12为腐蚀后的结果图,能够很明显地看出腐蚀的效果。
腐蚀膨胀算法原理
腐蚀膨胀算法原理
腐蚀膨胀算法(Erosion-DilationAlgorithm,缩写为EDA)是图像处理中最常用的算法之一。
它主要应用于图像的二值化处理,可以有效地消除图像中的噪声,以及实现图像中文字和物体的分割。
EDA是一种分水岭算法(Watershed Algorithm),该算法包括两个步骤,腐蚀和膨胀。
腐蚀步骤将从图像中提取图像对象的轮廓,而膨胀步骤将对象的轮廓填充,从而实现对图像对象的分割。
一般来说,EDA算法可以分为以下两步:
(1)腐蚀:腐蚀是图像处理中常用的技术,它的目的是去除图像中的噪声,消除图像中的噪点,并实现对图像中的文字或物体的轮廓提取。
腐蚀的基本原理是:使用一个结构元素(structuring element),它可以是不同类型的形状,如圆形、菱形、矩形等,将图像中某像素的非零元素替换为零。
(2)膨胀:膨胀是EDA算法中另一个重要的步骤,它是腐蚀的反向过程。
膨胀的基本原理是:使用一个结构元素将图像中某像素的零元素替换为非零元素,如果临近的像素是非零元素,则认为此像素属于某个对象的轮廓。
EDA算法的优点在于它既可以去除噪声,又可以实现文字或物体的分割。
此外,EDA算法还性能卓越,比一般算法要快得多,是图像处理中用到较多的算法之一。
但EDA算法也存在缺点:结构元素的选择不当,会影响到最终的结果;由于腐蚀操作的迭代,会导致目标图像的误差及失真问题;同
样,膨胀操作也会null影响图像的体积及精度。
总而言之,腐蚀膨胀算法是一种有效的图像处理算法,在图像的噪声消除、文字分割等应用中均有良好的效果,但也有一定的缺点,应该合理选择结构元素,以保证算法的正确性和最佳效果。
形态学图像处理小结

一.形态学基础知识理解形态学图像处理基本的运算包括:二值腐蚀和膨胀、二值开闭运算、骨架抽取、极限腐蚀、击中击不中变换、形态学梯度、Top-hat变换、颗粒分析、流域变换、灰值腐蚀和膨胀、灰值开闭运算、灰值形态学梯度等。
1.膨胀与腐蚀最基本的形态学操作有二种:膨胀与腐蚀(Dilation与Erosion)。
膨胀是在二值图像中“加长”和“变粗”的操作。
这种方式和变粗的程度由一个结构元素组成的集合来控制。
腐蚀是“收缩”或“细化”二值图像中的对象。
同样,收缩的方式和程度由一个结构元素控制。
腐蚀和膨胀是对白色部分(高亮部分)而言的,不是黑色部分。
膨胀就是图像中的高亮部分进行膨胀,“领域扩张”,效果图拥有比原图更大的高亮区域。
腐蚀就是原图中的高亮部分被腐蚀,“领域被蚕食”,效果图拥有比原图更小的高亮区域。
常用的三种膨胀与腐蚀的组合:开运算、闭运算、击中或击不中变换。
(1)开运算和闭运算: A被B的形态学开运算是A被B腐蚀后再用B来膨胀腐蚀结果。
其几何解释为:B在A内完全匹配的平移的并集。
形态学开运算完全删除了不能包含结构元素的对象区域,平滑了对象的轮廓,断开了狭窄的连接,去掉了细小的突出部分;(2)闭运算: A被B的形态学闭运算是先膨胀再腐蚀的结果,其几何解释为:所有不与A重叠的B的平移的并集。
形态学闭运算会平滑对象的轮廓,与开运算不同的是,闭运算一般会将狭窄的缺口连接起来形成细长的弯口,并填充比结构元素小的洞。
(3)击中击不中变换: 击中与击不中变换先对目标图像进行目标结构元素的腐蚀操作;后对目标图像的对偶进行背景结构元素的腐蚀操作;最后取两次结果的交集。
2.重构重构是一种涉及到两幅图像和一个结构元素的形态学变换。
一幅图像,即标记(marker),是变换的开始点。
另一幅图像是掩模(mask),用来约束变换过程。
结构元素用于定义连接性。
3.灰度图像形态学对于灰度图像来说,膨胀和腐蚀是以像素邻域的最大值和最小值来定义的。
计算机视觉实验报告-对图像进行腐蚀和膨胀
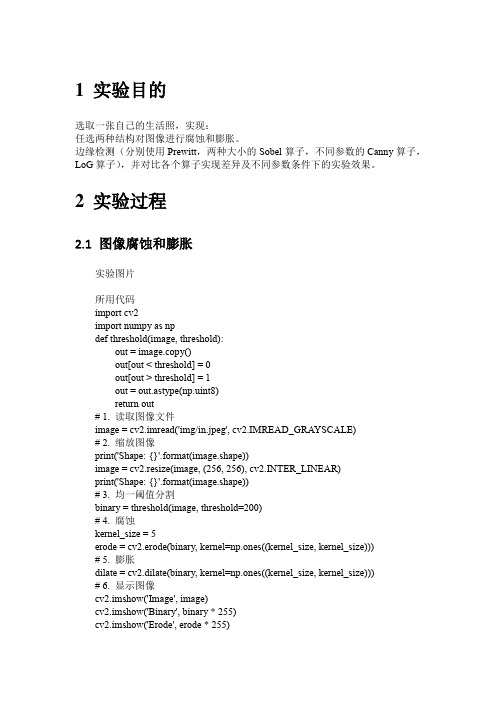
1实验目的选取一张自己的生活照,实现:任选两种结构对图像进行腐蚀和膨胀。
边缘检测(分别使用Prewitt,两种大小的Sobel算子,不同参数的Canny算子,LoG算子),并对比各个算子实现差异及不同参数条件下的实验效果。
2实验过程2.1图像腐蚀和膨胀实验图片所用代码import cv2import numpy as npdef threshold(image, threshold):out = image.copy()out[out < threshold] = 0out[out > threshold] = 1out = out.astype(np.uint8)return out# 1. 读取图像文件image = cv2.imread('img/in.jpeg', cv2.IMREAD_GRAYSCALE)# 2. 缩放图像print('Shape: {}'.format(image.shape))image = cv2.resize(image, (256, 256), cv2.INTER_LINEAR)print('Shape: {}'.format(image.shape))# 3. 均一阈值分割binary = threshold(image, threshold=200)# 4. 腐蚀kernel_size = 5erode = cv2.erode(binary, kernel=np.ones((kernel_size, kernel_size)))# 5. 膨胀dilate = cv2.dilate(binary, kernel=np.ones((kernel_size, kernel_size)))# 6. 显示图像cv2.imshow('Image', image)cv2.imshow('Binary', binary * 255)cv2.imshow('Erode', erode * 255)cv2.imshow('Dilate', dilate * 255) cv2.waitKey(0)实验效果Kernel=5Kernel=25代码分析及现象腐蚀,消除连通的边界,使边界向内收缩。
二值形态学膨胀、腐蚀、开、闭运算opencv
【二值形态学膨胀、腐蚀、开、闭运算opencv的深度解析】一、概念介绍1. 二值形态学在图像处理中,二值形态学是一种针对二值图像进行的形态学操作,主要包括膨胀、腐蚀、开、闭运算等。
2. 膨胀膨胀是二值形态学中的一种基本操作,它能够使目标区域扩张并填充内部的空洞,从而使目标变大。
3. 腐蚀腐蚀是二值形态学中的另一种基本操作,它能够使目标区域收缩并去除边缘细节,从而使目标变小。
4. 开运算开运算是先腐蚀后膨胀的组合操作,可以用来去除图像中的噪声和小的干扰目标。
5. 闭运算闭运算是先膨胀后腐蚀的组合操作,可以用来填补图像中的小孔和裂缝。
二、深入探讨1. 膨胀的原理和作用膨胀通过结构元素的滑动来扩张目标区域,可以使目标变大,填充空洞,连接断裂的目标,是图像处理中常用的操作之一。
2. 腐蚀的原理和作用腐蚀通过结构元素的滑动来收缩目标区域,可以使目标变小,去除边缘细节,分离接触的目标,也是图像处理中常用的操作之一。
3. 开闭运算的应用场景开运算通常用于去除图像中的小噪声和杂点,可以平滑目标轮廓,提高目标边缘的连通性;闭运算通常用于填补图像中的小孔和断裂,可以使目标更加完整,减少断裂和裂缝。
4. opencv中的二值形态学函数opencv提供了丰富的二值形态学函数,可以方便地进行膨胀、腐蚀、开、闭运算,如cv2.dilate()、cv2.erode()、cv2.morphologyEx()等,可以通过设置结构元素的形状和大小来调整操作效果。
5. 个人观点和理解对于二值形态学操作,我认为膨胀和腐蚀是其基础,而开闭运算则是在这两者基础上的进一步应用,能够更加精细地处理目标区域,去除干扰和噪声,提取有效信息。
在实际应用中,需要根据具体情况选择不同的操作和参数,以达到最佳的处理效果。
三、总结回顾通过本文的介绍和分析,我们深入理解了二值形态学中的膨胀、腐蚀、开、闭运算的原理和作用,以及在opencv中的应用方式。
我们也从个人观点出发,探讨了这些操作的实际意义和效果。
matlab数字图像处理-膨胀和腐蚀
基于Matlab的腐蚀和膨胀的边缘检测一、实验目的:掌握运用Matlab软件对灰度与二值图像的膨胀与腐蚀的处理方法。
二、实验环境(软件条件):Windws2000/XP MATLAB 7.x三、实验内容:1、图像膨胀的Matlab实现①实验原理:膨胀:给图像中的对象边界添加像素。
在操作中,输出图像中所有给定像素的状态都是通过对输入图像的相应像素及邻域使用一定的规则进行确定。
在膨胀操作时,输出像素值是输入图像相应像素邻域内所有像素的最大值。
在二进制图像中,如果任何像素值为1,那么对应的输出像素值为1。
可以使用imdilate函数进行图像膨胀,imdilate函数需要两个基本输入参数,即待处理的输入图像和结构元素对象。
结构元素对象可以是strel函数返回的对象,也可以是一个自己定义的表示结构元素邻域的二进制矩阵。
此外,imdilate还可以接受两个可选参数:PADOPT(padopt) ——影响输出图片的大小、PACKOPT (packopt).——说明输入图像是否为打包的二值图像(二进制图像)。
②实验步骤:A、首先创建一个包含矩形对象的二值图像矩阵。
R=zeros(9,10);R(4:6,4:7) =1R =0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 1 1 1 1 0 0 00 0 0 1 1 1 1 0 0 00 0 0 1 1 1 1 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0B、使用一个3×3的正方形结构元素对象对创建的图像进行膨胀。
C=strel('square',3)C =Flat STREL object containing 9 neighbors. Neighborhood:1 1 11 1 11 1 1C、将图像R和结构元素C传递给imdilate函数。
图像膨胀和腐蚀
图像膨胀和腐蚀图像二值形态学——腐蚀和膨胀的C语言实现数学形态学是法国和德国科学家在研究岩石结构时建立的一门科学。
形态学的用途主要是获取物体拓扑和结构信息,通过物体和结构元素相互作用的某些运算,得到物体更本质的形态。
在图像处理中的应用主要是:利用形态学的基本运算,对图像进行观察和处理,从而达到改善图像质量的目的;描述和定义图像的各种几何参数和特征,如面积、周长、连通度、颗粒度、骨架和方向性等。
关于形态学的具体描述和数学形式化的定义可以从文章底部的参考资料中获得。
最近的实验中需要对二值图像进行减噪处理,图像形态学中的腐蚀和膨胀能很好的解决此问题。
如果在腐蚀和膨胀操作前,对灰度图像做一次滤波,减噪效果将更明显。
腐蚀的具体操作是:用一个结构元素(一般是3×3的大小)扫描图像中的每一个像素,用结构元素中的每一个像素与其覆盖的像素做“与”操作,如果都为1,则该像素为1,否则为0。
膨胀的具体操作是:用一个结构元素(一般是3×3的大小)扫描图像中的每一个像素,用结构元素中的每一个像素与其覆盖的像素做“与”操作,如果都为0,则该像素为0,否则为1。
腐蚀的作用是消除物体边界点,使目标缩小,可以消除小于结构元素的噪声点;膨胀的作用是将与物体接触的所有背景点合并到物体中,使目标增大,可添补目标中的空洞。
开运算是先腐蚀后膨胀的过程,可以消除图像上细小的噪声,并平滑物体边界。
闭运算时先膨胀后腐蚀的过程,可以填充物体内细小的空洞,并平滑物体边界。
以下是一段在OpenCV中实现的C语言程序,分别是图像腐蚀和膨胀函数,输入的参数依次为:当前二值图像数据指针、图像宽度、图像高度。
通过这两个函数的组合使用(开闭运算),可以对图像进行有效减噪。
一、图像腐蚀膨胀细化的基本原理1.图像细化的基本原理⑴图像形态学处理的概念数字图像处理中的形态学处理是指将数字形态学作为工具从图像中提取对于表达和描绘区域形状有用处的图像分量,比如边界、骨架以及凸壳,还包括用于预处理或后处理的形态学过滤、细化和修剪等。
膨胀运算和腐蚀运算

膨胀运算和腐蚀运算
膨胀运算和腐蚀运算是数字图像处理中常用的形态学图像处理技术。
它们是基于图像的形状和结构特征来操作,能够在图像中识别和增强物体的形态。
下面是膨胀运算和腐蚀运算的简要解释:
1. 膨胀运算是对图像进行扩张和增大的一种操作。
它的基本思想是利用一个结构元素在图像中滑动,当结构元素与原始图像上的像素重合时,取结构元素内最大的像素值作为该像素点的新像素值。
因此,膨胀运算可以使目标物体变得更加坚定、更加圆滑,同时可以去除孔洞和内部噪声,使物体形态更加清晰明了。
2. 腐蚀运算是一种对图像进行收缩和缩小的操作。
它的基本思想是利用结构元素在图像上滑动,当结构元素完全覆盖要处理的像素时,取结构元素内最小的像素值作为该像素点的新像素值。
因此,腐蚀运算可以使物体边缘变得更加精细和明显,同时可以消除细节和孤立的小物体,使边缘和形态更加清晰和明了。
总的来说,膨胀和腐蚀是图像处理中常用的两种基本形态学操作,常常配合使用,以达到更好的图像增强、物体分割、形态分析等目的。
1/ 1。
开运算与闭运算填空题
开运算与闭运算填空题
开运算和闭运算是数学形态学中的两个基本操作,用于图像处理和分析。
它们分别是图像的腐蚀和膨胀操作的组合。
下面是填空题的解答:
1. 开运算:
开运算是先进行腐蚀操作,再进行膨胀操作。
它的作用是______________。
通过开运算,可以__________________。
2. 闭运算:
闭运算是先进行膨胀操作,再进行腐蚀操作。
它的作用是______________。
通过闭运算,可以__________________。
1. 开运算:
开运算是先进行腐蚀操作,再进行膨胀操作。
它的作用是去除小的干扰物体,平滑边界,并保持主要物体的形状和大小不变。
通过开运算,可以消除图像中的噪声、细小的斑点和细节,使图像
更加清晰和平滑。
2. 闭运算:
闭运算是先进行膨胀操作,再进行腐蚀操作。
它的作用是填充物体内部的小孔,连接相邻物体,并保持主要物体的形状和大小不变。
通过闭运算,可以填补图像中的空洞、连接断裂的物体,使图像更加完整和连续。
总结,开运算和闭运算是形态学图像处理中常用的操作,它们可以分别用于去除小的干扰物体和填补物体内部的小孔。
通过这两种操作的组合使用,可以对图像进行精细的处理和分析,提取出感兴趣的目标物体,并去除不必要的噪声和细节。
腐蚀膨胀算法原理
腐蚀膨胀算法原理腐蚀膨胀算法(Erosion and Dilation),是数字图像处理中常用的形态学操作之一、它们是基于图像中的区域形状进行处理的,可以用来改变图像的形态结构。
腐蚀操作可以使图像中的区域变小或者消失,而膨胀操作可以使图像中的区域变大或者连通。
腐蚀操作可以看作是将一个结构元素与图像进行逻辑“与”运算,如果结构元素的全部像素都与图像的相应位置的像素匹配,则该位置的像素值保持不变,否则将其置为0。
腐蚀操作能够删除图像中边缘或者小的细节部分。
腐蚀操作的基本原理是遍历图像的每一个像素,对于每个像素,检查其周围与结构元素的重叠部分(也称为该像素的邻域),如果重叠部分的像素值都为1,则保持原像素值不变,否则将其置为0。
这样,腐蚀操作不断缩小图像中的区域,直到所有的结构元素都与图像的相应位置的像素匹配。
腐蚀操作的伪代码如下:1.遍历图像的每一个像素2.对于每个像素,检查其周围与结构元素的重叠部分3.如果重叠部分的像素值都为1,则保持原像素值不变4.否则将其置为05.返回处理后的图像膨胀操作与腐蚀操作正好相反,可以看作是将一个结构元素与图像进行逻辑“或”运算,如果结构元素的任何像素与图像的相应位置的像素匹配,则该位置的像素值保持不变,否则将其置为1、膨胀操作可以使图像中的区域变大或者连通。
膨胀操作的基本原理与腐蚀操作类似,同样遍历图像的每一个像素,对于每个像素,检查其周围与结构元素的重叠部分,如果重叠部分的像素值中有一个为1,则保持原像素值不变,否则将其置为1、这样,膨胀操作可以不断扩大图像中的区域,直到所有的结构元素都与图像的相应位置的像素匹配。
膨胀操作的伪代码如下:1.遍历图像的每一个像素2.对于每个像素,检查其周围与结构元素的重叠部分3.如果重叠部分的像素值中有一个为1,则保持原像素值不变4.否则将其置为15.返回处理后的图像腐蚀膨胀算法常用于图像中的目标检测、边缘检测和形状识别等领域。
通过腐蚀操作可以消除孤立的噪声点或者细小的细节,从而提高目标检测的准确性。
【数字图像处理】二值化图像腐蚀运算与膨胀运算

【数字图像处理】⼆值化图像腐蚀运算与膨胀运算形态学基本概念基本思想:⽤⼀定形态的结构元素去度量和提取图像中的对应形状,达到分析知识的⽬的。
可⽤于图像处理的各个⽅⾯,包括图像分割、边界检测、特征提取。
结构元素:形态学变换中的基本元素,使为了探测图像的某种结构信息⽽设计的特定形状和尺⼨的图像,称为收集图像结构信息的探针。
结构元素有多种类型:如圆形、⽅形、线型等,可携带知识(形态、⼤⼩、灰度和⾊度信息)来探测、研究图像的结构特点。
形态学运算包括:⼆值化腐蚀和膨胀、⼆值化开闭运算、⾻架抽取、击中击不中变换等。
形态学四个基本算⼦:膨胀,腐蚀、开启和闭合组成,这些基本运算还可以推导和组合成各种数学形态学实⽤算法。
腐蚀运算腐蚀运算思路:定义结构元素(与模板类似),结构元素在整幅图像中移动,移动到每个像素点上,只有结构元素与图像上对应像素点的像素值全部相等时,保留这个像素点的值。
腐蚀运算作⽤:消除物体边界点,使边界点向内部收缩,可以把⼩于结构元素的物体去除。
选取不同⼤⼩的结构元素,去除不同⼤⼩的物体。
如两个物体间有细⼩的连通,通过腐蚀可以将两个物体分开。
腐蚀运算:腐蚀运算⽰意图:基本⽅法:通常拖到结构元素在X域移动,在每⼀个位置上,当结构元素B在中⼼平移到X图像上的某优点(x,y)。
如果结构元素内的每⼀个像素都与以(x,y)为中⼼的相同邻域中对应像素完全相同,那么就保留(x,y)像素点。
对于不满⾜条件的像素点则全部删除,达到边界向内收缩效果。
腐蚀运算c语⾔实现⽔平腐蚀:不处理左右两边垂直腐蚀:不处理上下两⾏全⽅位腐蚀:不处理四周 int Image[120][180];memset(Image, 0, sizeof(Image));//全⽅位腐蚀运算for (int i = 1; i < Use_ROWS-1; i++){for (int j = 1; j < Use_Line - 1; j++){if (Image_Use[i][j] == 255 &&Image_Use[i][j + 1] == 255 &&Image_Use[i][j - 1] == 255){Image[i][j] = 255;}}}膨胀运算膨胀运算思路:定义结构元素(与模板类似),结构元素在整幅图像中移动,移动到每个像素点上,如果结构元素与图像上对应像素点的像素值⾄少有⼀个像素相等时,保留这个像素点的值。
形态学方法基本操作:膨胀、腐蚀、开运算和闭运算可视化效果
形态学方法的基本操作包括膨胀、腐蚀、开运算和闭运算。
这些操作在形态学变换中起着重要的作用。
以下是这些操作的可视化效果:
1. 膨胀操作:膨胀操作可以扩大图像中高亮区域,使图像变得更加明亮。
在形态学变换中,膨胀操作通常被用于突出图像中的细节和特征。
2. 腐蚀操作:腐蚀操作可以缩小图像中高亮区域,使图像变得更加暗淡。
在形态学变换中,腐蚀操作通常被用于消除图像中的噪声和小的细节。
3. 开运算:开运算是先进行腐蚀操作,再进行膨胀操作。
这种操作可以去除图像中的小点、毛刺和小桥,同时总的位置和形状不会发生改变。
在形态学变换中,开运算通常被用于提取图像中的轮廓和线条。
4. 闭运算:闭运算是先进行膨胀操作,再进行腐蚀操作。
这种操作可以填平图像中的小湖(即小孔),弥合小的裂缝,同时总的位置和形状不会发生改变。
在形态学变换中,闭运算通常被用于填充图像中的空洞和小的黑点。
这些形态学方法的基本操作可以通过组合和变换来应用于图像处理中,以实现各种不同的视觉效果和应用。
(数字图像处理)腐蚀膨胀开运算闭运算

膨胀:是将与物体接触的所有背景点合并到该物体中,使边界向外部扩张的过程。可以用来填补物体中的空洞。
开运算:先腐蚀后膨胀的过程开运算。用来消除小物体、在纤细点处分离物体、平滑较大物体的边界的同时并不明显改变其面积。开运算通常是在需要去除小颗粒噪声,以及断开目标物之间粘连时使用。其主要作用与腐蚀相似,与腐蚀操作相比,具有可以基本保持目标原有大小不变的优点。
闭运算:先膨胀后腐蚀的过程称为闭运算。用来填充物体内细小空洞、连接邻近物体、平滑其边界的同时并不明显改变其面积。
原因:虽然腐蚀处理可以将粘连的目标物进行分离,膨胀处理可以将断开的目标物进行接续,但同时都存在一个问题,就是经过腐蚀处理后,目标物的面积小于原有面积,而经过膨胀处理之后,目标物的面积大于原有面积。开、闭运算就是为了解决这个问题而被提出的。
数学形态学中二值图像的形态变换是一种针对集合的处理过程。其形态算子的实质是表达物体或形状的集合与结构元素间的相互作用,结构元素的形状就决定了这种运算所提取的信号的形状信息。形态学图像处理是在图像中移动一个结构元素,然后将结构元素与下面的二值图像进行交、并等集合运算。
腐蚀膨胀
最近的实验中需要对二值图像进行减噪处理,图像形态学中的腐蚀和膨胀能很好的解决此问题。
如果在腐蚀和膨胀操作前,对灰度图像做一次滤波,减噪效果将更明显。
腐蚀的具体操作是:用一个结构元素(一般是3×3的大小)扫描图像中的每一个像素,用结构元素中的每一个像素与其覆盖的像素做“与”操作,如果都为1,则该像素为1,否则为0。
膨胀的具体操作是:用一个结构元素(一般是3×3的大小)扫描图像中的每一个像素,用结构元素中的每一个像素与其覆盖的像素做“与”操作,如果都为0,则该像素为0,否则为1。
腐蚀的作用是消除物体边界点,使目标缩小,可以消除小于结构元素的噪声点;膨胀的作用是将与物体接触的所有背景点合并到物体中,使目标增大,可添补目标中的空洞。
开运算是先腐蚀后膨胀的过程,可以消除图像上细小的噪声,并平滑物体边界。
闭运算时先膨胀后腐蚀的过程,可以填充物体内细小的空洞,并平滑物体边界。
一、图像腐蚀膨胀细化的基本原理1.图像细化的基本原理⑴图像形态学处理的概念数字图像处理中的形态学处理是指将数字形态学作为工具从图像中提取对于表达和描绘区域形状有用处的图像分量,比如边界、骨架以及凸壳,还包括用于预处理或后处理的形态学过滤、细化和修剪等。
图像形态学处理中我们感兴趣的主要是二值图像。
在二值图像中,所有黑色像素的集合是图像完整的形态学描述,二值图像的各个分量是Z2的元素。
假定二值图像A和形态学处理的结构元素B是定义在笛卡儿网格上的集合,网格中值为1的点是集合的元素,当结构元素的原点移到点(x,y)时,记为Sxy,为简单起见,结构元素为3x3,且全都为1,在这种限制下,决定输出结果的是逻辑运算。
⑵二值图像的逻辑运算逻辑运算尽管本质上很简单,但对于实现以形态学为基础额图像处理算法是一种有力的补充手段。
在图像处理中用到的主要逻辑运算是:与、或和非(求补),它们可以互相组合形成其他逻辑运算。
⑶膨胀和腐蚀膨胀和腐蚀这两种操作是形态学处理的基础,许多形态学算法都是以这两种运算为基础的。
二值图像的腐蚀和膨胀
⼆值图像的腐蚀和膨胀⼆值图像的腐蚀和膨胀图像数字处理中应⽤相当⼴泛,代码处理也很简单,只不过⼀些资料在介绍腐蚀和膨胀原理时,⽤⼀些形态学、集合上的概念和术语,搞得也有些”⾼深莫测“了。
从图像处理⾓度看,⼆值图像的腐蚀和膨胀就是将⼀个⼩型⼆值图(结构元素,⼀般为3*3⼤⼩)在⼀个⼤的⼆值图上逐点移动并进⾏⽐较,根据⽐较的结果作出相应处理⽽已。
以⼆值图的⾻架为⿊⾊点为例:作图像腐蚀处理时,如果结构元素中的所有⿊⾊点与它对应的⼤图像素点完全相同,该点为⿊⾊,否则为⽩⾊。
作图像膨胀处理时,如果结构元素中只要有⼀个及以上⿊⾊点与它对应的⼤图像素点相同,该点为⿊⾊,否则为⽩⾊。
也就是说,如果结构元素中的所有⿊⾊点与它对应的⼤图像素点没有⼀个相同,该点为⽩⾊,否则为⿊⾊。
结构元素中的所有⿊⾊点与它对应的⼤图像素点没有⼀个相同,说明⼤图的这些像素点都是⽩⾊的,假如⼆值图的⾻架为⽩⾊点,这个对⿊⾊⾻架⼆值图的膨胀处理恰好是对⽩⾊⾻架⼆值图的腐蚀处理。
同理,对⿊⾊⾻架⼆值图的腐蚀处理也就是对⽩⾊⾻架的膨胀处理。
根据这个道理,我们完全可以把对⿊⾊⾻架和⽩⾊⾻架分别所作的腐蚀和膨胀处理代码统⼀起来,使得原来所需要的四段处理代码变成⼆段甚⾄⼀段处理代码。
下⾯是⼀个对32位像素格式⼆值图像数据的腐蚀和膨胀处理的全部代码://---------------------------------------------------------------------------// 定义ARGB像素结构typedef union{ARGB Color;struct{BYTE Blue;BYTE Green;BYTE Red;BYTE Alpha;};}ARGBQuad, *PARGBQuad;//---------------------------------------------------------------------------// 获取⼆值图像data的字节图数据map,⾻架像素是否为⿊⾊VOID GetDataMap(CONST BitmapData *data, BitmapData *map, BOOL blackPixel){// 字节图边缘扩展1字节,便于处理data的边缘像素map->Width = data->Width + 2;map->Height = data->Height + 2;map->Stride = map->Width;map->Scan0 = (void*)new char[map->Stride * map->Height + 1];// +1防最末字节越界BYTE *ps = (BYTE*)data->Scan0;BYTE *pd0 = (BYTE*)map->Scan0;BYTE *pd = pd0 + map->Stride;BYTE *pt = pd;INT srcOffset = data->Stride - data->Width * sizeof(ARGBQuad);UINT x, y;// 如果⾻架像素为⿊⾊,获取异或字节图if (blackPixel){for (y = 0; y < data->Height; y ++, ps += srcOffset){*pd ++ = *ps ^ 255;for (x = 0; x < data->Width; x ++, ps += sizeof(ARGBQuad))*pd ++ = *ps ^ 255;*pd ++ = *(ps - sizeof(ARGBQuad)) ^ 255;}}// 否则,获取正常字节图else{for (y = 0; y < data->Height; y ++, *pd ++ = *(ps - sizeof(ARGBQuad)), ps += srcOffset){for (x = 0, *pd ++ = *ps; x < data->Width; x ++, *pd ++ = *ps, ps += sizeof(ARGBQuad)); }}ps = pd - map->Stride;for (x = 0; x < map->Width; x ++, *pd0 ++ = *pt ++, *pd ++ = *ps ++);}//---------------------------------------------------------------------------// 按结构元素模板templet制作字节掩码数组masks// templet低3字节的低3位对应结构元素,如下⾯的结构元素:// ⽔平垂直⼗字⽅形其它// ○○○○●○○●○●●●○●○// ●●●○●○●●●●●●●●●// ○○○○●○○●○●●●○●●// ⽤templet分别表⽰为:0x000700, 0x020202, 0x020702, 0x070707, 0x020703VOID GetTempletMasks(DWORD templet, DWORD masks[]){for (INT i = 2; i >= 0; i --, templet >>= 8){masks[i] = 0;for (UINT j = 4; j; j >>= 1){masks[i] <<= 8;if (templet & j) masks[i] |= 1;}}}//---------------------------------------------------------------------------VOID Erosion_Dilation(BitmapData *data, DWORD templet, BOOL blackPixel){BitmapData map;GetDataMap(data, &map, blackPixel);PARGBQuad pd = (PARGBQuad)data->Scan0;BYTE *ps = (BYTE*)map.Scan0 + map.Stride;INT width = (INT)data->Width;INT height = (INT)data->Height;INT dstOffset = data->Stride - width * sizeof(ARGBQuad);INT value = blackPixel? 0 : 255;INT x, y;if (templet == 0x0700) // ⽔平结构元素单独处理,可提⾼处理速度{for (y = 0; y < height; y ++, (BYTE*)pd += dstOffset, ps += 2){for (x = 0; x < width; x ++, pd ++, ps ++){if (*(DWORD*)ps & 0x010101)pd->Blue = pd->Green = pd->Red = value;}}}else{DWORD masks[3];GetTempletMasks(templet, masks);for (y = 0; y < height; y ++, (BYTE*)pd += dstOffset, ps += 2){for (x = 0; x < width; x ++, pd ++, ps ++){if (*(DWORD*)(ps - map.Stride) & masks[0] ||*(DWORD*)ps & masks[1] ||*(DWORD*)(ps + map.Stride) & masks[2])pd->Blue = pd->Green = pd->Red = value;}}}delete map.Scan0;}//---------------------------------------------------------------------------// ⼆值图膨胀。
膨胀和腐蚀运算的优缺点

膨胀和腐蚀运算的优缺点
膨胀和腐蚀运算是数字图像处理中经常使用的基本形态学运算。
它们可以用来改善图像的质量、去除噪声、分割目标等。
但是,它们也存在一些优缺点,下面就来详细介绍一下。
优点:
1. 增强图像的边缘和轮廓:膨胀和腐蚀运算可以增强图像的边缘和轮廓,使目标更加突出,更容易进行后续的图像处理。
2. 去除噪声:膨胀和腐蚀运算可以去除图像中一些小的噪声,使图像更加清晰。
3. 分割目标:膨胀和腐蚀运算可以将图像中的目标进行分割,使得后续处理更加容易。
缺点:
1. 信息丢失:膨胀和腐蚀运算会导致一些信息的丢失,使得图像的细节变得模糊。
2. 形态学运算的复杂度:膨胀和腐蚀运算的复杂度比较高,需要耗费较多的计算资源和时间。
3. 影响图像质量:如果膨胀和腐蚀运算的参数设置不合理,可能会导致图像质量下降,从而影响后续的图像处理结果。
总的来说,膨胀和腐蚀运算在数字图像处理中具有重要的作用,但需要根据具体的情况进行合理的参数设置和运算处理,才能达到最佳的效果。
- 1 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二.原理
特殊领域运算形式——结构元素 结构元素(Structure 结构元素 Element),在每个像素位置上与二值图像对应的 区域进行特定的逻辑运算。运算结果是输出图像 的相应像素。运算效果取决于结构元素大小内容 以及逻辑运算性质。
• 结构元素 结构元素:膨胀和腐蚀操作的最基本组成 部分,用于测试输出图像,通常要比待处 理的图像小的多。二维平面结构元素由一 个数值为0或1的矩阵组成。结构元素的原 点指定了图像中需要处理的像素范围,结 构元素中数值为1的点决定结构元素的邻域 像素在进行膨胀或腐蚀操作时是否需要参 与计算。
腐蚀的算法: 腐蚀的算法 用3x3的结构元素,扫描 图像的每一个像素 用结构元素与其覆盖的 二值图像做“与”操作 如果都为1,结果 图像的该像素为1。否则为0。 结果:使二 值图像减小一圈.
• 图像膨胀Matlab实现 ,则膨胀前后效果图 图像膨胀Matlab实现 则膨胀前后效果图: Matlab
四.结语 结语 通常由于噪声的影响, 通常由于噪声的影响,图像在阈值化后所得 到的边界通常都很不平滑,物体区域具有一些噪 到的边界通常都很不平滑, 声孔,而背景区域上散布着一些小的噪声物体, 声孔,而背景区域上散布着一些小的噪声物体, 连续的开和闭运算可以有效的改善这种情况, 连续的开和闭运算可以有效的改善这种情况,而 有时,我们需要经过多次腐蚀之, 有时,我们需要经过多次腐蚀之,后再加上相同 次数的膨胀,才能产生比较好的处理效果。 次数的膨胀,才能产生比较好的处理效果。可见 图像腐蚀与图像膨胀相结合有时可使图像有较理 想的处理效果。 想的处理效果。
图像的腐蚀和膨胀
图像的腐蚀和膨胀
一 .研究背景和意义
依据数学形态学集合论方法发展起来的图像处理方法,起 源于岩相对岩石结构的定量描述工作,在数字图像处理和 在数字图像处理和 机器视觉领域中得到了广泛的应用,形成了一种独特的数 机器视觉领域中得到了广泛的应用 字图像分析方法和理论。数学形态学是图像处理和模式识 领域的新方法,其基本思想 基本思想是:用具有一定形态的结构元 基本思想 素去量度和提取图像中的对应形状,以达到图像分析和识 别的目的。优势有以下几点:有效滤除噪声,保留图像中 原有信息,算法易于用并行处理方法有效实现,基于数学 形态学的边缘信息提取处理优于基于微分运算的边缘提取 算法,提取的边缘比较平滑,提取的图像骨架也比较连续, 断点少
可以看到图像边界向外扩张
图像腐蚀Matlab实现,则腐蚀前后效果对比 : 实现, 图像腐蚀 实现
可以看到图像边界向内部收缩
若是对图像先腐蚀后膨胀,与原图效果对比如下: 若原图效果对比如下: 若是对图像先膨胀后腐蚀,则与原图效果对比如下:
• 常见形态学运算有腐蚀(Erosion)和膨胀 (Dilation)两种 • 腐蚀:删除对象边界某些像素。 腐蚀 • 膨胀 膨胀:给图像中的对象边界添加像素。
• 三.算法及效果图 膨胀的算法: 膨胀的算法 用3x3的结构元素,扫描 图像的每一个像素 用结构元素与其覆盖的 二值图像做“与”操作 如果都为0,结果 图像的该像素为0。否则为1 结果:使二值 图像扩大一圈.
• 结果分析 若先腐蚀后膨胀的过程: 若先腐蚀后膨胀的过程:利用它可以消除小物 在纤细点处分离物体,平滑较大物体边界, 体,在纤细点处分离物体,平滑较大物体边界, 但同时并不会明显改变原来物体的面积。 但同时并不会明显改变原来物体的面积。而先膨 胀后腐蚀的过程: 胀后腐蚀的过程:利用它可以填充物体内细小空 连接临近物体、平滑其边界, 洞,连接临近物体、平滑其边界,但同时并不会 明显改变原来物体的面积。 明显改变原来物体的面积。