介绍V-BUS
VGA工作原理和常见故障分析
2011/6/30
12
二、显示卡各端口功能简介
2011/6/30
13
三、显卡芯片GPU(A卡) 显卡芯片 ( 卡
3.1、GPU标识:
2011/6/30
14
三、显卡芯片GPU(A卡) 显卡芯片 ( 卡
◆GPU商标部件信息描述解释:
2011/6/30
15
三、显卡芯片GPU(A卡) 显卡芯片 ( 卡
2011/6/30 26
卡常用调试命令行。 六、A卡常用调试命令行。 卡常用调试命令行
◆DOS测试命令:tserver –boardtest=quickmfg ◆常规DOS测试方法: 例如487A-YDF产品,其核芯和显存频率分别为 ENG=750MHZ,MEM=900MHZ。按工厂常规DOS超频测 试,其步骤如下: 首先执行agt –eng=785 –mem=918命令行回车后再输入 tserver –boardtest=quickmfg ◆常规显存测试方法:只需将以上 tserver –boardtest=quickmfg 命令行变更为tserver –test=ak404.002(类似于test 27)
2011/6/30 21
四、显存(memory): 显存
公式:显存频率 显存时钟周期*2。 公式 显存频率(MHZ)=1/显存时钟周期 。 显存频率 = 显存时钟周期 如果是SDRAM显存,其时钟周期为6ns,那么它的显 存频率就为1/6ns=166 MHz。 而对于DDR SDRAM或者DDR2、DDR3,其时钟周期为 6ns,那么它的显存频率就为1/6ns=166 MHz,但要了解 的是这是DDR SDRAM的实际频率,而不是我们平时所说 的DDR显存频率。因为DDR在时钟上升期和下降期都进 行数据传输,其一个周期传输两次数据,,其一个周期传 输两次数据,相当于SDRAM频率的二倍。习惯上称呼的 DDR频率是其等效频率,是在其实际工作频率上乘以2, 就得到了等效频率。因此6ns的DDR显存,其显存频率为 1/6ns*2=333MHZ.
UPS 中BUS电容寿命的分析

计算电容内部温度Th, Rth为电容的热阻 其值和风速等有关,Ta表示电容表面温度
Th Ta PLoss RTh
3.4 计算电容寿命的公式
Lop Kv A 2( BTh / C ) Hours
A 参数是指在参考温度下的寿命,其值电容 直径有关 B 是参考温度,对85度电容,其值为85.
3
0
0
0
50
100
150
0
0 0
50
100
150
Fig1. 时域分析法电容电流谐波分析 0 j 150
j 150 Fig2. 频域分析法电容电流谐波分析
低频电流0-60次谐波 高频60-150次谐波
时域分析法
频域分析法
32.8A
39A
1.74A
1.7A
4.7 计算公式的参数选取
PLoss P(1) P( 2) P(3) ... P( n ) I ( j ) ESR( j )
C参数根据电容类型由厂家
Kv 是指电容电压参数,厂家提供
四, UPS BUS电容的寿命分析
4.1 UPS BUS电容设计要求和选 用电容介绍
UPPS 30K设计中,要求25度条件下,电容寿命7年。 RIFA 公司的PEH506YEQ4180M4 1800uF*10个,正负BUS各5个 ESR Value=59mOHM, at 20 °C 100Hz
I capa_pos_nlj 20
0
0
0 0
50 j
100
150 150
Fig3. 频域分析法电容电流谐波分析
4.6 两种谐波分析方法的比较
两种方法的结果,整体上比较接近.
CAN-BUS控制系统
原则上CAN总线上用一条导线就足已满足要求了,但是在该总线系统上还是配备了第二条 导线,在这个第二条导线上,信号是按相反的顺序传送的,这样可以抑制外边干扰。
制作:冯健
汽车电气控制系统
CAN总线控制技 术
•CAN数据总线的数据传递类似于电话会议. •对这个数据感兴趣的用户就会利用该数据,而其他用户则选择忽略
CAN构件用于数据交换,分为 两个区,一个是接受区,一个是发 送区.
CAN构件一般集成在控制单元 的微控制器芯片中,通过接受油 箱或发送油箱与控制单元相连.
制作:冯健
汽车电气控制系统
CAN总线控制技 术
Canbus的收发器如图所示,使用一个电路进行控制,这样也就是说控制单 元在某一时间段只能进行发送或接受一项功能。
5. 使用数据
如果接收到数据是相关的, 控制单 元接受并处理; 否则忽略.
2. 发射数据
CAN 收发器接收 CAN 控制器 传来的数据并转化为电信号传 递
3. 接收数据
CAN bus 网络中所有其它控制 单元,作为潜在的接收器
控制单元1
数据使用 数据检查 数据接收
控制单元2 数据使用 数据检查 数据发射
控制单元3 数据使用 数据检查 数据接收
控制单元4 数据使用 数据检查 数据接收
4. 检查数据
收到信号的控制单元,评估该信 号是否与其功能有关。
CAN –BUS线
制作:冯健
汽车电气控制系统
CAN总线控制技 术
K线: 用于在自诊断时连接VAS检测仪的.
控制单元 控制单元接受来之传感器的信号,并 将其处理后再发送到执行元件上.
传输线 被用于双向传输数据的导线 CAN High——高位 CAN Low——低位
CAN总线技术介绍V
输入输出控制单元IOU
CAN总线控制系统控制原理
按照程序:转向灯 开关闭合,我应该 好,告诉前后模块让前 转向灯亮了,我得 后转向灯亮啦! 报告给使用者! 喇叭开关关闭, 告诉前模块,让 喇叭工作 发送信号 发送信号 收到喇叭工作指 哦,仪表单元让我打 哦!前转向灯亮咯 开前转向灯! 示,给喇叭工作 ,灯正常,我得把 开灯… 电压 信息反馈给仪表单 元
报告单元 1号,灯1不工作了 1控制喇叭
报告,灯1不 工作了! 我想用开关3和开 关4同时闭合时, 灯4才能亮 我想用开关1控制所有 的灯 我想用开关
灯4
我想……
蜂鸣器报警
CAN总线系统架构
示 意 图
可与电喷发动机及其他总 线单元实现实时通讯 (ABS、缓速器、GPS等)
可根据需要增添模块 模块可随意互换
Q:2.什么是CAN 总线?
2A:CAN总线是英文Controller Area Network的缩写,就是某种信息交换技术的网络布置 方法. CAN是ISO国际标准化的串行通信协议。在当前的汽车产业中,出于对安全性、舒适 性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些 系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多, 线束的数量也随之增加。为适应“减少线束的数量”、“通过多个LAN,进行大量数据 的高速通信”的需要,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。此 后,CAN 通过ISO11898 及ISO11519 进行了标准化,现在在欧洲已是汽车网络的标准协议
CAN总线技术
CAN总线系统简介
CAN 总线简介
CAN总线的由来 :
1983年,德国博世公司首先提出了用于汽车的控制器局域网 (CAN-Controller Area Network)协议的构想。到今天CAN总线已经成 为国际上应用最广泛的现场总线并已被采用为国际标准(ISO11898) 。
DC-BUS及简介
配电变压器
燃气 轮机
3000 2000
技 服商业建筑
内燃机
配电变压器
燃气 轮机
光伏 电池
飞轮
务 中
储能
燃料电池
商业建 筑
工厂企业 居民
分布式发电微网(MG)
国
DG输出功率
1000
0 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
技 波电流,减少对外电网的污染和冲击。
服 务
• 4、增加设备使用寿命,降低噪音和振动等。
中
国
30
以 诚 信 立 足 世 界
用
科 技
追求人生的美好!
服
我们的共同目标!
务
中
国
31
边界
太阳 能
储能
中央 控制
热、冷
冷热电联供
储能
装置
风电
特点:孤网独立运行
7
以
诚
信
立
DC-BUS背景说明
足
世 • 1)随着新能源技术的发展,特别是智能电网中分布式光伏发电与风 能发电的广泛应用,它们随着环境变化而产生变化的电能需要一个能
界 量储藏系统。
• 2)对于连续型生产或对控制要求很高的场合,采用DC-BANK“抗晃
780V(充电末)
0.2ms 293V(高输出放电末)-
766V(充电末)
国
21
以
诚
信 立
DC-BUS的应用
足
负载调平+ 停电时的备用电源 + 优先新能源供电
世
界
输出
放电
用
DC-BUS及简介

用户侧的分布式发电和分布式能源利用系统
负荷需求曲线
KW
大型电厂 升压变
DC-BUS系统组成 1、光伏发电装置 包括太阳能电池模组、管理系统、汇流升压模块、电池充
电模块等
2、风能发电装置 包括风机、管理系统、整流升压模块、电池充电模块等 3、MW级储能单元 NAS电池、液流电池或铅酸电池等 4、市电充电装置 负载采用原有的接入系统,不需做任何改动 充电装置需要接入市电充电装置
dcdcbusbus系统组成系统组成11光伏发电装置光伏发电装置包括太阳能电池模组管理系统汇流升压模块电池充包括太阳能电池模组管理系统汇流升压模块电池充电模块等电模块等22风能发电装置风能发电装置包括风机管理系统整流升压模块电池充电模块等包括风机管理系统整流升压模块电池充电模块等33mwmw级储能单元级储能单元nasnas电池电池液流电池液流电池或铅酸电池等或铅酸电池等44市电充电装置市电充电装置负载采用原有的接入系统不需做任何改动负载采用原有的接入系统不需做任何改动充电装置需要接入市电充电装置充电装置需要接入市电充电装置dcdcbusbus系统组成系统组成55控制照明系统变电站控制照明系统变电站acdc220vacdc220v包括直流变压模组管理系统包括直流变压模组管理系统配电系统等配电系统等66动力系统变电站动力系统变电站ac380dc600vac380dc600v包括高压直流变压模组管理系统包括高压直流变压模组管理系统高压配电系高压配电系统变频器等统变频器等77中央管理系统中央管理系统包括电脑管理系统通讯管理系统等实时监包括电脑管理系统通讯管理系统等实时监测新能源发电情况实现与市电无缝切换报警测新能源发电情况实现与市电无缝切换报警报表汇总等功能
DC-BUS及简介
以一种友善的方式与电力系统 发生交互作用 (good citizen)
输电 网络
G GGG
高压配网
110KV
中压配网
35/10KV
低压配网 0.4KV
负荷
MG MG
负荷
MG
MG
MG
将分布式电源组成微网(MG)运行
冷热电联供热、冷Fra bibliotek微网光伏
边界
太阳 能
储能
中央
控制
热、冷
储能 冷热电联供
装置
风电
44m 82m 2MW 变流器 17组
风力发电机组
钠硫电池 钠硫电池
交直流转换器 交直流转换器
控制大楼 变电站
控制室
太阳能应用项目
太阳能电池5 MW +1.5MW钠硫电池 NEDO DC-BUS项目
1MW NAS 0.5MW NAS
) *由 NEDO 赞助(新能源和产业技术综合开发机构
吸收功率输出的DC波-动BUS的光伏输出
互动
安全
智能电网
优质
经济
自愈
更好地识别和应对人 为的或自然的侵害
对电网故障的预控 与自动恢复
支持全社会用电成 本的优化
智能电网的六大特征
智能电网技术组成
高级计量体系(AMI) 高级配电运行(ADO) 高级输电运行(ATO) 高级资产管理(AAM)
ADO-Advanced Distribution Operations
MW级电池之一 NAS电池介绍
NAS电池系统和铅电池、镍铬电池及锂离子电池一样都属 于二次电池中的一种,可以进行多次的充放电。NAS电池 系统的正极用硫磺、负极用钠,在电解质中正负极之间只 有钠离子能够通过的某种“铝”,外表系精细的陶瓷。
M-BUS介绍(一)
15
C5 10uF
R15 C6 12K 104
<220uF,1UL <470uF, 2UL 3.3V电压驱动能力 调制电流IMC控制
14
3
4
6
RIS
SC
从机电路设计(隔离)
VCC 6 C3 8 R5 R6 GD1 620 2 3 6N139 5 7 VCC R8 10K R9 10K TXD 8 6 R7 15K RXD C4
M-BUS远程网络示意图
^_^ 从机 ^_^ 从机 ^_^ 从机 ^_^ 从机
^_^ 中继
^_^ 从机
^_^ 从机
^_^ 示意图
欧洲现行的市场状况
所有的热表普遍接受
所有的电子水表普遍接受
气表,电子仪表
所有类型的仪表技术
M-BUS性能对比
项目 通讯距离 通讯电平 总线最高电 压 长距离通讯 连线 极性 网点分布 线缆 给节点供电 静态损耗 主机控制器 设计 电磁兼容性 RS485 <1200 差分电压 -7~12V 1200bps 两线,需外部供电 极性 串联 屏蔽线 否 <128 简单 差 M-BUS 1000/3600 下行电压变化,12V 上行电流环,11~20mA 42V 4800bps 两线,可供电 无极性 任意分支 双绞线RV1.5 允许,<0.65mA(1UL) <256 复杂 好 允许更高的波特率 降低主机负担 方便施工,减少连线失误 方便现场施工 节省开支,布线方便,减小连线失 误 降低负担 节点多 描述 差不多,选用不同的线缆可 通讯更可靠
多户集抄
一、特点: •距离长 •节点多 •总线电流大 •高总线电压 •发热大。 二、开发: •总线电压产生电路要求高 •器件选型受限 •一定体积,散热性能好 •线缆选择 •软件相对复杂一点
具有中间母线的多变换器系统的稳定性阻抗判据

具有中间母线的多变换器系统的稳定性阻抗判据张欣1,阮新波1,2,谢智刚2,3(1. 南京航空航天大学航空电源航空科技重点实验室,南京市 210016;2. 华中科技大学强电磁工程与新技术国家重点实验室,湖北省 武汉市 430074;3. 香港理工大学电子与信息工程学院,香港)摘 要 分布式电源系统具有稳定性问题,即独立工作稳定的变换器组成分布式电源系统后有可能不稳定。
目前判断分布式电源系统是否稳定的最有效方法是阻抗判据,现有的阻抗判据按应用场合可分为两种,一种是Middlebrook 判据,该判据适用于源变换器控制中间母线电压的级联系统;另一种是Sun Jian 教授提出的判据,该判据适用于源变换器控制中间母线电流的级联系统。
然而,现有阻抗判据虽然在级联系统中是有效的,却不易在分布式电源系统中推广,因为实际的分布式电源系统可能有多个源变换器,并且源变换器中,可能一部分控制母线电压,而另一部分控制母线电流,比如带蓄电池储能的光伏供电系统。
其实,分布式电源系统是由具有中间母线的多变换器系统组成。
本文将针对具有中间母线的多变换器系统,利用二端口阻抗模型推导其稳定性阻抗判据,而现有的阻抗判据是本文所提出的判据的特例。
研究表明,本文所提的阻抗判据更适合在分布式电源系统中推广和使用。
论文最后搭建了一个480W 带蓄电池储能的光伏供电系统,实验验证了所提阻抗判据的正确性。
关键词 分布式电源系统,中间母线,多变换器系统,稳定性,阻抗判据,光伏系统1 引言分布式电源系统具有系统架构灵活、变换效率高、易于冗余和余度供电等优点[1],已广泛应用于空间站、混合动力汽车、通讯电源和新能源发电等领域[2]。
然而独立工作稳定的变换器,组成分布式电源系统后有可能不稳定[3]。
从系统架构上来看,分布式电源系统中存在几种典型结构,即并联结构、级联结构、多分立电源结构、多分立负载结构[4]。
目前分布式电源系统稳定性问题的研究主要针对级联系统展开。
CBUS元件及功能介绍

C-BUS输出单元功能介绍
四路智能继电器L5504RVF, L5504RVFP,L5504RVF20P
• 名称:四路智能继电器 • 型号:L5504RVF,L5504RVFP, • L5504RVF20P • 电压:AC220-240V • C-BUS输出电压:DC15-36V • 功能介绍:实现四个回路灯的开和关,需要用 • 八件面板或者电脑软件和触摸屏来实现场 • 景控制。 • L5504RVF是带电的继电器,L5504RVFP是不带电的,
• 5050CT2 WE是无逻辑变成, 5050CTL2 WE是带逻辑编程的!
室内,室外红外移动探测器
• 名称:室内,室外红外移动探测器 • 型号:E5751L,5753L,E5750WPL • C-BUS输出电压:DC15-36V • 功能:红外探测器,探测角度,90度,360度,110度
亮度传感器
PC接口5500PC,5500PCU
• 名称:PC接口 • 型号:5500PC,5500PCU(PC接口分两种, • 232接口的和USP接口的)
• C-BUS输出电压:DC15-36V • 功能介绍:提供PC和C-bus网络的接口, • 提供第三方软件监控C-bus网络标准的 • RS232接口集中控制及诶口,系统调试接口
• 名称:亮度传感器 • 型号:E5031PE • C-BUS输出电压:DC15-36V • 亮度控制范围:40-1600LUX • 亮度传感范围:20-3000LUX • 功能:通过检测周围环境的亮度,在于内部设定 • 值相比较,调整光源的亮度和分布,有效的利用自然光线,达到节约
能源的目的
C-Bus系统介绍
什么是C-Bus?
C-Bus系统是一个分布式、二线制、专业的智能照明控制系统。所有的控制 单元均内置微处理器和存储单元,由一对信号线(UTP5)连接成网络。通过 软件对所有单元进行编程,实现相应的控制功能。
MODBUS&SPABUS规约

© 北京易艾斯德科技有限公司 - 13 -
2013年11月12日3时44分
第三部分:通讯规约
Spabus通讯规约
© 北京易艾斯德科技有限公司 - 14 -
2013年11月12日3时44分
SPA-Bus通讯规约
1. 2. 3.
SPA-Bus规约的介绍 SPA-Bus帧格式特点 SPA-Bus规约的报文
2. 3. 4.
5.
特点:
半双工传输模式 两线制 带载能力32个节点(目前技术可实现128个节点容量)
© 北京易艾斯德科技有限公司 - 5 -
2013年11月12日3时44分
第二部分:通讯规约
Modbus通讯规约
© 北京易艾斯德科技有限公司 - 6 -
2013年11月12日3时44分
Modbus通讯规约
在使用RS485接口时,对于特定的传输线路,从RS485 接口到负载其数据信号传输所允许的最大电缆长度与信 号传输的波特率成反比,这个长度数据主要是受信号失 真及噪声等影响所影响。
理论上RS485的最长传输距离能达到1200米,但在实际 应用中传输的距离要比1200米短,具体能传输多远视周 围环境而定。在传输过程中可以采用增加中继的方法对 信号进行放大,最多可以加八个中继,也就是说理论上 RS485的最大传输距离可以达到9.6公理。
© 北京易艾斯德科技有限公司 - 15 -
2013年11月12日3时44分
SPA-Bus通讯规约
1.
SPA-Bus通讯规约的介绍
专用于ABB继电器保护的传输规约 基于ASCII码的数据传输 其传输方式是主站与子站之间以Polling方式进行的
© 北京易艾斯德科技有限公司 - 16 -
智能照明控制系统说明

一、智能照明控制系统说明1、设计依据l 智能化系统招标书l 《民用电气设计规范》 JGJ/T16-92l 《建筑电气安装工程质量检验评定标准》 GYJ1253-88l 《民用建筑照明标准规范》 GBJ133-90l 《智能建筑评估标准》 DG/TJ08-602-2001 J10105-20012、设计原则可行性和适应性保证技术上的可行性和系统的可适应性实用性和经济性贯彻全面应用,坚持实用、经济的原则先进性和成熟性既要采用先进的理念、技术和方法,又要注意结构、设备的相对成熟。
不但能反映当今的先进水平,而且具有发展潜力,能够适应未来若干年内的发展。
开放性和标准性为了满足所选用的技术和设备的协同运行能力、系统投资的长期效应以及系统功能不断发展的需求。
必须追求系统的开放性和标准性。
可靠性和稳定性在考虑技术新进和开放性的同时,还应从系统结构、技术措施、设备性能、系统管理等方面着手,确保系统运行的可靠性和稳定性,达到最大的平均无故障时间。
可扩展性和易维护性为了适应系统变化的需要,必须充分考虑以最简洁的方法,最低的投资,实现系统的扩展和维护。
3、方案说明(1)C-Bus系统结构<?xml:namespace prefix = v ns ="urn:schemas-microsoft-com:vml" /><?xml:namespace prefix = w ns = "urn:schemas-microsoft-com:office:word" />C-Bus系统分为一个主网(Local Network)和数个一级子网(Network),主网与子网之间采用UTP-5线缆连接网络桥。
在设计时,主网和子网都有冗余。
(2)系统功能1. 根据季节、作息时间、照度变化等对照明系统进行自动化管理。
2. 在监控计算机上用图形模拟创新基地内实际照明回路的开关状态,值班人员可根据需要用鼠标点击图形来控制回路的开关。
网联汽车CANBUS智能信息车载TBOX终端API接口协议-V1.14
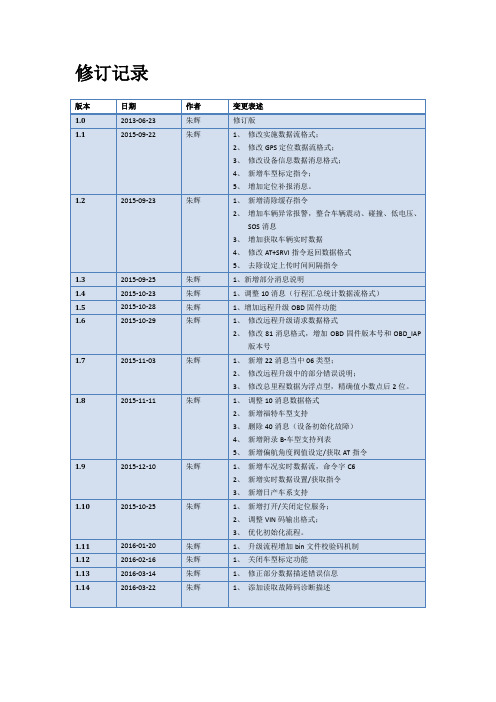
版本 1.0 1.1
日期 2013-06-23 2015-09-22
作者 朱辉 朱辉
1.2
2015-09-23
朱辉
1.3
2015-09-25
朱辉
1.4
2015-10-23
朱辉
1.5
2015-10-28Fra bibliotek朱辉1.6
2015-10-29
朱辉
1.7
2015-11-03
朱辉
1.8
2015-11-11
朱辉
THREAD tech co.,ltd
目录
T6 汽车 OBD 智能信息终端 V1.14
一、 二、
三、 四、 五、 六、
引言......................................................................................................................................................... 4 协议规范 ................................................................................................................................................. 4 服务器端 AT 请求指令语法规范 ........................................................................................................... 4 终端
CANBus-SVW
2,6 V (2,0 V)
隐性
1
2,6 V (2,5 V)
2,4 V (2,5 V)
0,2 V (0 V)
48
从双线信号中获得 信号电平
49
逻辑信号电平
log: „1“ log. „0“ CAN-L 对应于逻辑电平!
50
CAN-总线抗干扰措施
51
CAN-收发器的基本电路
52
连有两个电阻值均 为120 Ohm终端电 阻器的标准CAN-配 置
为什么要进行CAN-Bus 的培训
• CAN需要全新的技术来检测 • 用传统的测量仪器(检测灯、万用表等)无 法发现CAN-Bus上的故障 • CAN-Bus的调试和故障查寻需要接受过培训 的专业人员
1
汽车内的CAN总线
CAN-Bus基础及其驱动系总线
2
培训内容(1)
• • • • 为什么要在汽车内采用总线系统 CAN-总线系统 CAN-总线上控制单元及其信息传递 CAN-数据传输线及其驱动系总线上的信号 电平 • 用FLUK 123测量CAN-信号 • 终端电阻的作用 • CAN-信息帧
53
2,6k
连有中央终端电阻 的VW-CAN
60
收发器-IC z.B. TJA 1050
2,6k
54
TJA 1050 CAN-驱动 器
55
TJA 1050: 接线
56
TJA 1050: 技术参数
57
驱动系总线上的曲线图
>=3,5V CAN-H 信号
2,5V 静止电压
<= 1,5V CAN-L 信号 位宽 2,0 us,传输速率500 kBit/s
17
CAN-总线系统
IBM Integration Bus V9.0 产品介绍说明书

• In many scenarios IIB out performs other integration products by 2:1
• IIB Express versus a S&S only open source model
• IIB Express versus rental approach
– IIB Express typically 17,000 AUD per core 1st year S&S
• 1400 AUD per month per core for 1st 12 months • 300 AUD per month there after based on (3400 AUD follow year S&S)
• Patterns capture, create your own pattern templates • Accelerate delivery • Breed Re-use • Drive out errors – the template is the contract between designer and
• Example: University in Sydney
– ½ Day introduction, ½ Day a week mentoring from IBM – 3 man team, only one experienced programmer (no previous WMB skills) – Acquisition to production in 4 months
6
IBM Integration Bus – Easy to Engage
现场总线NCUC-Bus的技术特点与应用
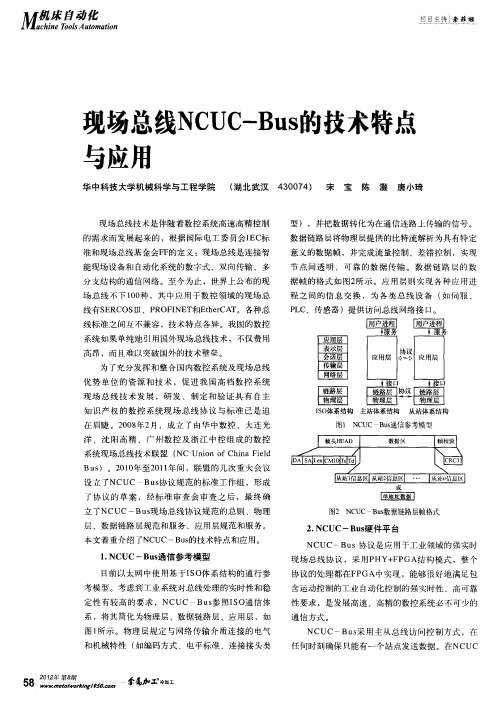
期 通 信 。周 期 通信 可 以 完 成 主设 备 和从 设 备 问 实时
设 备 为 主 设 备 ,不 能 主 动 发 起 总 线 通 信 、只 能 被
动 响应 的 总 线 设备 称 为 从 设 备 。 基于 NCUC Bu s
信息 ( 如伺服控制指令 、实时状态等);非周期通
信 则 实现 非 实 时信 息 ( 如监 控 、诊 断信 息 状 态 等 )
圈 圈
IO体系结构 S
知识产权 的数控 系统 现场总线协 议与标准 已是迫
在 眉 睫 。2 0 年 2 ,成 立 了 由华 中数 控 、大 连 光 08 月 洋 、沈 阳 高 精 、广 州 数 控 及 浙 江 中控 组 成 的 数 控
系 统现 场 总线 技 术联 盟 ( ino hn il NC Uno fC i aF ed
协议包括延时测量和时钟 同步两个步骤 。延时测量
用 于 测 量 数据 帧在 现 场总 线 网络 中 的总 环路 时 间和 主 站 到 各从 站 的 延 时 ;时 钟 同 步通 过 主 站发 送 的 时 间基 准 和 从 站 延 时 同 步 各从 站 时 钟 。NC UC—B s u
3 NC C—B s 信实时性技术 . U u通
准和现场总线基金会F 的定义:现场总线是连接智 F
能 现场 设 备 和 自动 化 系统 的 数 字式 、双 向传 输 、 多 分 支 结 构的 通 信 网络 。至 今 为 止 ,世 界上 公 布 的现 场 总 线 不 下 1 0 ,其 中应 用 于 数 控 领 域 的现 场 总 0种 线有 S R O Ⅲ 、P O I E  ̄Eh r A 。各 种 总 E C S R FN T N teC T 线标 准 之 间互 不兼 容 ,技 术特 点 各异 。我 国 的数 控