自动驾驶之底盘线控
列举底盘线控系统的组成
列举底盘线控系统的组成
底盘线控系统是汽车底盘部分的电子控制系统,主要由以下几个组成部分组成:
1. 感应器(传感器):底盘线控系统通过感应器检测车辆的动态信息,如车速、转向角度、制动力等参数。
常见的感应器包括轮速传感器、转向角传感器、制动压力传感器等。
2. 控制单元(ECU):底盘线控系统的控制单元负责接收感应器传输的信号,并根据预设的算法和逻辑进行相应的计算和判断,从而控制底盘系统的运行状态。
控制单元通常位于车辆的中央电子模块(ECM)或底盘控制模块(BCM)中。
3. 执行器:控制单元通过执行器控制车辆的底盘部件,从而实现对车辆底盘的控制。
常见的执行器包括制动器、驱动电机、悬挂器等。
4. 电源系统:底盘线控系统需要电源供电,以保证其正常工作。
电源系统通常由车辆的蓄电池提供。
以上是底盘线控系统的一般组成部分,不同车型和品牌的底盘线控系统可能会有所不同。
另外,一些高级底盘线控系统可能还包括主动悬挂系统、防侧滑系统、动力分配系统等。
智能网联汽车技术基础最新版课件-项目五 智能网联汽车底盘线控技术
2、线控驱动系统认知
智能网联汽车底盘线控技术
图5-2-3传统汽车线控驱动系统控制方式图
2、线控驱动系统认知
(2)电动汽车线控驱动系统
图5-2-4 电动汽车线控驱动系统控制原理图
智能网联汽车底盘线控技术
如图5-2-4所示,由于电动汽车整车控制单 元(VCU)的主要功能是通过接收车速信号、 加速度信号以及加速踏板位移信号,实现扭矩需 求的计算,然后发送转矩指令给电机控制单元, 进行电机转矩的控制,所以通过整车控制单元 VCU的速度控制接囗来实现线控驱动控制。
学习目标
1. 掌握线控驱动系统的概念 2. 掌握线控驱动系统的结构以及工作原理 3. 了解线控驱动系统的分类
智能网联汽车底盘线控技术
理论知识
一、线控驱动系统简介 二、线控驱动系统结构 三、线控驱动系统分类
智能网联汽车底盘线控技术
2、线控驱动系统认知
智能网联汽车底盘线控技术
一、线控驱动系统简介
线控技术认知
智能网联汽车底盘线控技术
图5-1线控技术的基本原理图
由于线控系统取消了传统的气动、液压及机械连接,取而代之的是传感器、控制单元及电磁执 行机构,所以具有安全、响应快、维护费用低、安装测试简单快捷的优点。智能网联线控技术主要 包括线控转向技术、线控制动技术、线控驱动技术、线控换挡技术和线控悬架技术等。
1、线控转向系统认知
二、线控转向系统结构
智能网联汽车底盘线控技术
前轮
1 2
3 前轮
故障处 理ECU
ECU
6
指令
传感器信号
4
转
向
1:故障执行电机
柱
2:转向执行电机
5
3:轮速传感器 4:转角传感器
无人驾驶车辆底盘控制系统设计与实现

无人驾驶车辆底盘控制系统设计与实现随着科技的不断发展,无人驾驶技术已经成为近年来备受关注的热门话题。
随着无人驾驶车的日渐普及,底盘控制系统的设计与实现也愈发重要。
底盘控制系统作为整个车辆系统中的核心,扮演着重要的角色。
它是无人驾驶车体系结构的一个重要组成部分,对于车辆的性能和安全起到了至关重要的作用。
下面,笔者将结合实际的案例,探讨无人驾驶车辆底盘控制系统设计与实现相关问题。
一、底盘控制系统的设计无人驾驶车辆底盘控制系统的设计需要考虑到底盘本身的特点和整个车辆系统的需求。
底盘控制系统通常包括电机控制、传动控制、刹车控制等多个子系统,这些子系统间需要紧密配合,以确保车辆的正常行驶及其安全可靠。
下面,我们将具体说明底盘控制系统设计中的一些关键问题:1. 底盘电机控制底盘电机控制是底盘控制系统中最关键的一部分,也是最具挑战性的一个问题。
电机控制需要能够准确控制电机的输出力、转速及运动方向,以满足差速转向、加速、刹车等各种需求。
同时,还需要考虑到能量损失、电机故障等风险问题。
针对这些问题,我们需要采用高性能的电机控制器和一系列先进的控制算法,以确保底盘电机控制的可靠性和准确性。
2. 底盘传动控制底盘传动控制是维持车辆平稳行驶的另一个关键问题。
传动控制需要考虑到各个轮胎的转速及方向,以确保整个车辆的稳定性。
此外,还需要考虑到传动系统的精度、可靠性和可维护性等问题。
为此,我们需要采用高精度的传感器和一系列先进的控制算法,以确保传动系统能够准确、可靠地驱动车辆。
3. 底盘刹车控制底盘刹车控制是确保车辆安全行驶的关键问题。
刹车控制需要确保整个车辆能够在任何情况下都能快速、准确地停车,以保护乘客的安全。
此外,还需要考虑到刹车系统的反应速度、可靠性和可维护性等问题。
为此,我们需要采用高性能的刹车系统和一系列先进的控制算法,以确保刹车控制能够快速、准确地停车。
二、底盘控制系统的实现无人驾驶车辆底盘控制系统的实现需要编写高质量的代码,并将其运用到车辆实际运行中。
智能驾驶底盘线控技术

任务一:线控底盘的构成
线控底盘运行逻辑
智能网联汽车概论
4.1.2线控油门系统
1. 基本定义
线控油门( Throttle--wire-by,TBW), 即使用电信号的形式来控制节气门的 一种电子控制技术。
线控油门通过用导线代替拉索或者拉 杆,由加速踏板上的位置传感器将电 信号输入给ECU,从而进行发动机的 运行控制。线控油门系统主要由加速 踏板位置传感器、ECU、CAN数据总 线、伺服电机和节气门构成。位置传 感器安装在加速踏板内部,随时监测 加速踏板的位置。当监测到加速踏板 高度位置有变化时,会瞬间将此信息 送往ECU,ECU对该信息和其他系统 传来的数据信息(如车速、扭矩、节气 门开度、发动机转速等)进行运算处 理,计算出一个控制信号,传送到伺 服电机,由伺服电机驱动节气门执行 机构。数据总线则是负责系统ECU与 其他ECU之间的通讯
智能网联汽车概论
项目四 智能驾驶底盘线控技术
1.知识目标:
• (1)了解汽车线 控技术的含义和 分类
• (2)理解汽车线 控技术的结构
• (3)掌握汽车线 控技术的工作原 理及用途
2.技能目标:
• (1)了解汽车线 控技术的技术特 点
• (2)理解汽车线 控技术与传统技 术的区别
• (3)掌握汽车线 控技术的应用场 景
智能网联汽车概论
4.1.3线控转向系统
3.线控转向系统的结构及原理
线控转向系统的工作原理:方向盘将驾驶员或车辆计算平台的转向意图通过 传感器转换成电信号,随后传递给转向齿条执行机构。转向齿条执行机构则 从方向盘执行机构接受信号,并根据驾驶员的转向意图将方向盘角度信号转 换成轮胎的摆动,控制助力电机工作,从而对转向系统进行控制
智能网联汽车底盘线控系统与控制技术

智能网联汽车底盘线控系统与控制技术作者:林大杰来源:《时代汽车》2023年第24期摘要:随着智能网联汽车的电气化技术的不断发展,其底盘的电气控制水平也在不断地提升。
作为智能网联汽车的的核心技术之一,底盘线控制技术的应用将直接关系到车辆的安全性、运行稳定性等,并且其也是促进智能网联汽车发展的关键要素。
基于此,本论文旨在通过对智能网联汽车底盘线控容错控制方法的研究,对当前智能网联汽车底盘线控系统控制技术展开分析,最后再提出智能网联汽车底盘线控控制方式,以期更好地提升汽车的整体性能。
关键词:智能网联汽车底盘线控系统控制技术1 引言底盘控制系统作为汽车行驶的核心部件,其主要作用是对车辆的行驶进行有效地控制,并在此过程中提高汽车的操控性、稳定性以及安全性。
就当前技术发展而言,在智能网联汽车底盘控制系统方面也取得了一定的进展。
但智能网联汽车发展过程中,在线控系统层面也面临着一定问题与挑战,主要表现在:(1)现有的线控技术无法适应智能网联汽车对车辆自身性能要求;(2)车辆线控系统的控制器还不够成熟;(3)车载计算处理单元(CAN)的通信协议不够完善;(4)底盘控制系统本身存在一定问题等。
由此对智能网联汽车底盘线控系统与控制技术进行研究将具有必要性。
2 底盘线控技术概述智能网联车辆的终极目标是使自动驾驶成为可能。
线控底盘是自动驾驶执行端的重要部件,该技术具有复杂环境感知、智能决策、协同控制等特点,使汽车在行驶过程中能够安全、节能、高效地进行自主行驶。
智能网联汽车装配有传感器、控制器、执行器等,期间通过利用互联网技术和现代通讯技术的方式,也将能够使得车辆信息能够实现智能交换和共享。
智能网联汽车的技术主要分为智能化和互联两个方面,为了使汽车智能化、网络化,将需要采用VCU(Vehicle Control Unit,VCU)对车辆的各种信息进行集成和处理,并将其传递给底盘系统。
底盘系统是根据指令精确地完成的,汽车在行驶时需要大量精确的底盘信号来感知车辆的状况,以确保车辆得以实现安全稳定运行。
自动驾驶的线控底盘技术
自动驾驶的线控底盘技术在实现自动驾驶汽车的控制过程中,涉及到许多问题。
例如,控制车辆的转向,是通过输入方向盘转角位置还是输入扭矩来实现的?在进行加减速行驶时,是根据力度改变油门开度吗?在进行刹车制动时,如何精确控制制动百分比数值?要了解自动驾驶控制器与底盘组件之间信息交互关系,就需要先了解车辆的底盘控制组件的原理。
自动驾驶的实现首先依赖于感知传感器对道路周边环境信息进行采集,包括摄像头、激光雷达、毫米波雷达和超声波等。
采集的数据传输到中央计算单元进行计算,用来识别车辆周边障碍物和可行驶区域,进行路线规划和控制,最后制定方向盘转角和速度等信息,传输到底盘执行机构,按照指令进行精确执行。
在整个控制过程中,底盘执行机构的功能要完善,系统响应和精度要高。
底盘执行机构就像人的手和脚,用来做控制执行,是自动驾驶控制技术的核心部件,对整个底盘系统的要求非常高。
线控底盘是自动驾驶的必要条件。
在自动换道时,常常出现回退过度甚至偏出本车道导致不安全,继而系统又通过较大的回调力矩将车辆拉回车道中央。
在自动驾驶对中或驾驶员控制换道过程中,驾驶员缓慢施加力矩进行方向盘控制时,容易出现系统抢夺方向盘。
这些问题严重影响自动驾驶控制精度,延长落地的时间。
因此,需要结合实际存在的问题给出相应的解决方案,不断协调线控底盘和控制器之间的交互问题,改进线控底盘技术,这无疑会促进线控底盘的技术。
智能化、大数据网联化给线控底盘发展带来新的契机。
智能汽车需要大量的、精确的底盘系统信号。
而种类繁多的底盘传感器,信号模式和处理方法各异,且大量传感器信号汇入控制器对信号实时处理提出更高要求,因此亟需研究新型底盘域控制器,对多源传感器信号实时处理、校验与解算理论。
智能汽车直接前馈预瞄控制需要精确的车辆模型,逼近真实车辆动力学状态。
而底盘车辆及轮胎动力学呈现复杂非线性特性,因此亟需深入研究车辆复杂动力学模型精确解算机制,促进智能汽车的动力学应用发展。
线控底盘工作原理

线控底盘工作原理线控底盘是一种引入电子控制技术的底盘控制系统,通过电子传感器和执行器实现对底盘系统各个功能的实时监测和精确控制。
它能够改善车辆的操控性能,提高行驶安全性和乘坐舒适性。
线控底盘的工作原理主要包括传感器、控制器和执行器三个部分。
传感器部分是线控底盘的感知器官,其作用是将车辆各个功能的参数转换为电信号,并传输给控制器。
常见的底盘传感器有转向传感器、制动传感器、悬挂传感器、电动机传感器等。
转向传感器可以感知方向盘的转动角度和速度,并将这些信息传输给控制器,从而实现转向系统的控制。
制动传感器可以感知制动踏板的力度和位置,控制器可以根据这些参数控制制动系统的工作。
悬挂传感器可以感知车身的悬挂状态和载荷,控制器可以根据这些信息调整悬挂系统的工作状态。
电动机传感器可以感知电动机的转速和输出扭矩等参数,控制器可以根据这些参数控制驱动系统的工作。
控制器是线控底盘的大脑,其主要功能是接收传感器传来的信号,进行信号处理和分析,并给出相应的控制指令。
控制器通常由微处理器和相关硬件组成,它可以根据预设的控制策略,实时监测车辆各个功能的工作状态,判断车辆运行状况,并通过电子执行器对底盘系统进行准确控制。
控制器可以根据传感器数据的变化,实时调整控制参数和控制策略,以满足不同条件下的车辆行驶需求。
执行器是控制器的执行部分,其作用是根据控制器的指令,对底盘系统进行相应的控制。
执行器根据控制指令,调节液压装置、电机驱动系统等,实现对底盘系统的控制。
例如,控制器可以通过执行器调节悬挂系统的阻尼和弹性特性,提高车辆的乘坐舒适性和操控性能。
控制器还可以通过执行器控制制动系统的工作,实现制动力的调节和分配,提高车辆的制动性能和安全性。
线控底盘的工作原理可以简单地概括为:传感器感知车辆各个功能的参数,将其转换为电信号并传输给控制器;控制器接收传感器信号,进行信号处理和分析,给出相应的控制指令;执行器根据控制器的指令,对底盘系统进行精确控制。
新能源汽车智能驾驶线控底盘技术应用研究
NEW ENERGY AUTOMOBILE | 新能源汽车时代汽车 新能源汽车智能驾驶线控底盘技术应用研究刘建铭 刘建勇 张发忠山东天海科技股份有限公司 山东省聊城市 252000摘 要: 新能源汽车智能驾驶线控系统包含了线控转向、线控制动、线控换挡、线控油门几部分构成。
线控底盘技术属于新能源汽车智能驾驶涉及到的关键技术,也是推进智能驾驶不断更新发展的有效支撑,是现阶段新能源汽车研发制造的热点问题。
本文结合笔者实际研究,探讨了新能源汽车智能驾驶线控系统结构及其线控底盘技术的基本原理,对全矢量控制线控底盘技术展开分析。
关键词:新能源 智能驾驶 线控底盘 技术应用1 引言线控底盘技术属于新能源汽车智能驾驶更新发展的关键技术,是未来汽车智能驾驶的必然选择。
线控底盘技术的应用改变了过去那种复杂的机械连接设备和液压、气压等零部件,在很大程度上促进了能量利用效率提升,在很大程度上提高了新能源汽车可支持的续航。
按照国务院2020年正式提出的《新能源汽车产业发展规划(2020-2035)》中的要求,更高级别的智能驾驶汽车在未来必然能够得以推广普及,当前新能源汽车行业的共识便是“无线控,不自动驾驶”,这也很好地说明了线控底盘技术在新能源汽车智能驾驶领域占据的重要位置。
2 新能源汽车线控底盘技术原理现阶段新能源汽车智能驾驶线控底盘系统包含了线控油门、线控转向、线控制动以及线控换挡四个基本模块,下文针对这四个子模块的结构与基本原理展开详细分析。
2.1 线控油门系统结构及原理线控油门系统即电子节气门技术,其基本结构包含了加速踏板传感器、控制器、传递线路和节气门执行器构成。
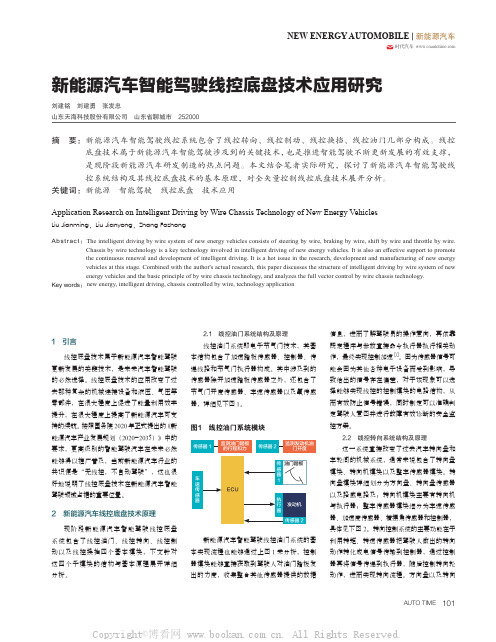
其中涉及到的传感器除开加速踏板传感器之外,还包含了节气门开度传感器、车速传感器以及氧传感器,详细见下图1。
图1 线控油门系统模块新能源汽车智能驾驶线控油门系统的基本实现流程也能够通过上图1来分析,控制器模块能够直接获取到驾驶人对油门踏板发出的力度,收集整合其他传感器提供的数据信息,进而了解驾驶员的操作意向,再依靠既定程序与参数直接命令执行器执行相关动作,最终实现控制加速[1]。
自动驾驶线控底盘行业研究报告
自动驾驶线控底盘行业研究报告自动驾驶线控底盘行业真是个让人兴奋的话题!想象一下,你坐在车里,放松身心,喝着咖啡,车子自己在路上欢快地行驶,完全不用担心红绿灯,简直是梦幻般的体验吧。
线控底盘,这个名字听起来有点高大上,但其实就像你家里的遥控器,只不过它控制的是整个车子的运动。
这种技术不仅能提升驾驶体验,还能让交通变得更加安全。
这项技术其实已经悄然无息地走进了我们的生活。
小到电动滑板车,大到未来的无人驾驶出租车,线控底盘都发挥着不可小觑的作用。
说到安全,谁不希望在路上开车的时候像坐在云端一样放心呢?线控底盘通过精确控制车辆的各个部分,减少了人为错误的发生,简直就是为司机们的“心脏”加了一道保险。
这背后可是有不少黑科技在支撑哦!车子的每一个动作都被传感器精确捕捉,真的是“眼观六路,耳听八方”,把路上的信息都统统纳入掌握。
车子像是个聪明的孩子,能够判断什么时候加速,什么时候刹车,让人感觉特别踏实。
这种智能化的趋势,未来甚至会让我们把车子当成朋友,随时可以分享生活中的点滴。
咱们也得提提环境保护的问题。
线控底盘的电动化发展,正是为了给我们的地球减负。
你想,电动车比传统汽车排放少,减少了空气污染,开起来也更安静,简直是“静若处子,动若脱兔”。
随着科技的进步,这种车子在我们生活中出现的频率会越来越高,未来的城市里,清新的空气会让人心旷神怡。
不过,说到市场竞争,那可真是一场腥风血雨啊!各大厂商纷纷摩拳擦掌,争先恐后地进入这个行业。
谁不想在这条“发财路”上分一杯羹呢?有的公司在技术上投入重金,像是在打“攻坚战”,有的则在营销上大做文章,试图抓住消费者的心。
就像过年时的年夜饭,各家都有各家的拿手好菜,消费者当然也得眼光挑剔。
当然了,自动驾驶的普及也面临不少挑战。
比如,法律法规跟不上、社会接受度不足,这些都需要时间去磨合。
毕竟,咱们的生活习惯可不是说变就能变的。
就像孩子上学,得循序渐进,慢慢来。
而这一切,都是为了让我们将来能够享受更安全、更舒适的出行体验。
线控底盘工作原理

线控底盘工作原理
线控底盘是一种电动平衡车,它使用了一种叫做“倒立摆”的控制原理来实现平衡。
其工作原理主要分为三个部分:
1. 姿态检测
线控底盘通过内置的陀螺仪和加速度计,实时检测车身的倾斜角度和加速度,将数据通过控制器传输给电机,实现车身的控制。
2. 电机控制
线控底盘采用了两个独立的电机,一个在前一个在后,它们通过运转的速度和方向来控制整个车身的平衡。
当车身向前倾斜时,后面的电机会加速,前面的电机会减速,使车身得以保持平衡。
3. 操作控制
线控底盘的操作控制主要通过手柄来实现,手柄通过无线信号将操作指令传输给底盘控制器,控制器根据指令调整电机的速度和方向,使底盘向前、向后、左右移动。
总的来说,线控底盘的工作原理非常精密和复杂,但通过科学的控制方法和高精度的检测技术,它能够在极短的时间内实现平衡,为人们带来全新的出行方式。
- 1 -。
项目五 智能网联汽车底盘线控技术

项目五 智能网联汽车底盘线控技术
C目 录 ONTENTS
任务一 线控转向系统认知 任务二 线控驱动系统认知 任务三 线控制动系统认知 任务四 线控换挡系统认知 任务五 线控悬架系统认知
线控技术认知
智能网联汽车底盘线控技术
线控技术(X by Wire),是将驾驶员的操作动作经过传感器转变成电信号来实现传递控制,替 代传统机械系统或者液压系统,并由电信号直接控制执行机构以实现控制目的,基本原理如图5-1所 示。该技术源于美国国家航空航天局(National Aeronautics and Space Administration,NASA )1972年推出的线控飞行技术(Fly by Wire)的飞机。其中,“X”就像数学方程中的未知数,代 表汽车中传统上由机械或液压控制的各个部件及相关的操作。
由于线控制动通过ECU实现系统控制 ,ECU的可靠性、抗干扰性、容错性以及 多控制系统之间通信的实时性,都有可能 对制动控制产生影响,制约了线控制动系 统的应用与推广。
线控转向系统(Steering By Wire,SBW),是智能网联汽车实现路径跟踪与避障避险必要的 关键技术,为智能网联汽车实现自主转向提供了良好的硬件基础,其性能直接影响主动安全与驾乘 体验。线控转向系统取消了传统的机械式转向装置,转向盘和转向轮之间无机械连接,可以减轻车 体重量,消除路面冲击,具有减小噪声和隔震等优点。
1、线控转向系统认知
智能网联汽车底盘线控技术
转向盘模块包括转向盘、转向盘转角传感器、扭矩电机。其主要功能是将驾驶 员的转向意图,通过测量转向盘转角转换成数字信号并传递给主控制器;同时接受 ECU送来的力矩信号产生转向盘回正力矩,向驾驶员提供相应的路感信号。
1、线控转向系统认知
自动驾驶乘用车线控底盘性能要求及试验方法-第1部分:驱动系统优选全文
自动驾驶乘用车线控底盘性能要求及试验方法第1部分:驱动系统1范围本标准规定了自动驾驶乘用车线控驱动系统性能要求及试验方法。
本标准适用于L3级及L4级自动驾驶乘用车,其他车辆可参考使用。
2规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅所注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 19596-2017电动汽车术语GB/T 3730.2-1996道路车辆质量词汇和代码GB/T 12534-2009汽车加速性能试验方法GB7258-2017 机动车运行安全技术条件GB/T 18488.1-2015 电动汽车用驱动电机系统第1部分:技术条件GB/T 40429-2021 汽车驾驶自动化分级GB/T 2977 -2016 载重汽车轮胎规格、尺寸、气压与负荷QC/T 893 -2011 电动汽车用驱动电机系统故障分类及判断GB/T 2977-2016 载重汽车轮胎规格、尺寸、气压与负荷3术语和定义GB/T 40429-2021所规定及下列术语和定义适用于本文件。
3.1自动驾驶车辆automated vehicle具备3级及以上级别驾驶自动化能力的车辆。
3.2自动驾驶控制器automated driving controller;ADC车辆自动驾驶功能的处理单元,可发出控制指令,由硬件和软件共同组成。
3.3线控驱动系统propulsion-by-wire system;PBW使用电子线路和通讯传输等线控技术,接收控制器或驾驶员驱动指令实现车辆动力输出的驱动系统。
注:在不引起混淆的情况下,本文件中的“线控驱动系统”简称为“系统”。
4一般要求4.12系统架构线控驱动系统一般由驾驶员操作的换挡机构和加速踏板、挡位控制单元、动力控制单元、自动驾驶控制单元、动力总成组成。
典型架构,如图1所示。
电电电电 电电图1系统架构示例4.2功能要求在车辆运行期间,系统应满足以下功能要求:a)b)c)d)在车辆最高设计速度以内都能实现线控驱动;支持车辆实现挡位线控控制;车辆在自动驾驶模式下,当驾驶员有效干预车辆获得驾驶权时,系统应退出自动线控驱动状态并将驱动控制权交给驾驶员;应支持车辆实现故障自诊断功能与跛行故障行车模式。
线控底盘知识介绍

线控制动系统
10
10
电子机械式线控制动系统(EMB)
EMB系统示意图
EMB虽然在减轻整车重量、提高汽车燃油经济性 和整车装配等方面有很多优越性,但EMB使用本身工 作环境恶劣、电子元器件易受干扰,系统工作的安全 性和可靠性还有待提高;EMB要求助力电机的性能优 越,反应迅速,体积小巧,在电机设计上难度很大, 成本很高。
2019.01.08
PCB布板图
车辆动力学与控制课题组
电机 旋转 变压 器
编程/ 在线 调试
数据 存储/ 调试 命令
iBooster电子控制单元总体方案
20
电机
20
iBooster软件框图
eBooster
制动压力、踏板位 置等信号处理模块
驾驶员制动意图识 别模块
工作模式逻辑控制模块
制动压力控制模块
线控驱动的主要组成部分有:电子油门踏板、 电机控制器、驱动电机或发动机。电子油门踏 板用于识别驾驶员的加速意图,该电信号被电 机控制器采集,电机控制器识别出驾驶员加速 意图后向驱动电机或发动机发出指令驱动车辆 加速。
发动机
电子油门踏板
电机控制器
2019.01.08 车辆动力学与控制课题组
电机
34
34
线控底盘介绍
2019.01.08
1
目录
1
线控底盘关键零部件介绍
2
线控制动系统介绍
3
线控转向系统介绍
4
线控驱动系统介绍
2019.01.08
2
目录
1
线控底盘关键零部件介绍
2
线控制动系统介绍
3
线控转向系统介绍
4
线控驱动系统介绍
自动驾驶矿卡底盘线控改装设计研究
10.16638/ki.1671-7988.2021.012.005自动驾驶矿卡底盘线控改装设计研究*袁政1,米承继2,刘洲1,陶晓1(1.长沙智能驾驶研究院有限公司,湖南长沙410006;2.湖南工业大学,湖南株洲410200)摘要:针对传统矿卡底盘不是线控底盘,无法满足其自动驾驶需求的情况,本研究主要设计及改装一台传统矿卡,将其人工控制的方式,通过改装加入额外的机电设备,使其能够做自动驾驶线控。
主要通过更改、加装的方式将车辆油门、制动、转向、挡位、手刹、车灯、雨刮等功能升级为电信号控制。
该改装方案可靠、成本低、周期快,满足传统矿卡自动驾驶需求,有助于传统矿卡自动驾驶技术快速落地。
关键词:自动驾驶矿卡;线控转向;线控制动;线控油门中图分类号:U469.4;TD5 文献标识码:A 文章编号:1671-7988(2021)12-14-05Research and Design of the Drive-by-wire System for Autonomous Mine Trucks*YUAN Zheng1, MI Chengji2, LIU Zhou1, TAO Xiao1( 1.Changsha Intelligent Driving Research Institute Ltd, Hunan Changsha 410006;2.Hunan University of Technology, Hunan Zhuzhou 410200 )Abstract: For the traditional mine card chassis is not a wire controlled chassis, unable to meet its autonomous driving needs, The main purpose of this research is to modification of a traditional mine card, the man-made control vehicle mode is modified to add additional mechanism and control boards, and communicate with the intelligent controller to realize the autonomous vehicle. The functions of the vehicle, such as power system control, brake system control, steering system control, gear control system, handbrake system control, light and wiper, are upgraded to electric signal control through modification and installation. The modification scheme is reliable, low cost and fast cycle, which can meet the demand of traditional mine trucks automatic driving and help the traditional mine card automatic driving technology to be implemented quickly.Keywords: Autonomous mine trucks; Steering-by-wire; Brake-by-wire; Power-by-wireCLC NO.: U469.4; TD5 Document Code: A Article ID: 1671-7988(2021)12-14-05前言近年来随着AI人工智能的兴起,世界正吹起一股自动驾驶的浪潮。
一文解析自动驾驶的线控底盘技术

一文解析自动驾驶的线控底盘技术线控底盘技术现状总结线控转向目前线控转向系统技术主要在研发阶段,从整车厂角度,已搭载该技术的量产车型仅英菲尼迪Q50一款车,泛亚和同济大学联合进行预研发,并没有与零部件厂商合作。
从供应商角度,目前博世、采埃孚等厂商正积极研发做样件,但还未在整车上搭载,博世线控转向系统采用的是双冗余全备份方案。
线控制动目前市场上线控制动技术主流的路线是电子液压制动(EHB)系统,且已经有多款量产产品,如博世的 iBooster 、大陆的MK C1等。
电子机械制动(EMB)系统由于技术不够成熟,目前仍处于研发阶段。
线控驱动针对传统内燃机汽车,线控驱动技术(线控油门)目前在乘用车和商用车上普遍应用,市场占有率达99%以上;针对新能源汽车,线控驱动技术已经全面应用,现在正处于集中电机驱动阶段,随着电气化水平的提高,未来将向以轮边电机和轮毂电机为代表的分布式驱动发展。
线控悬架线控悬架虽能自动调节线控弹簧的刚度、车身高度以及减震器阻尼,但由于重量、成本和可靠性的原因,目前属于非刚需配置,主要在C级和D级车中配备。
因此对于整车厂而言,线控减震器的装配优先级最高,其次是线控弹簧,最后是线控防倾杆。
从发展潜力上讲,线控空气弹簧、CDC/MRC型线控减震器的未来发展前景相对较好。
线控底盘技术难点总结线控转向线控转向技术的应用核心难点是系统的安全性和可靠性。
由于线控转向系统方向盘和转向轮之间没有直接的机械连接,当线控转向系统出现故障时,车辆将无法保证转向功能,会处于失控状态。
虽然目前采用冗余措施,但也仅能一定程度上提高可靠性,目前的控制器在故障诊断和处理能力上还需要进一步提升。
另外,路感模拟技术也是线控转向系统的技术难点之一。
线控制动电子液压制动(EHB)系统相较于电子机械制动(EMB)系统要成熟的多,目前在应用上几乎没有太大的难点。
EMB系统应用落地的主要难点有:(1)没有备份系统,对安全性要求极高;(2)刹车力不足问题,需要提供足够多的能量;(3)工作环境恶劣,如高温、震动等。
汽车底盘线控与动力学域控制技术

汽车底盘线控与动力学域控制技术一、本文概述随着科技的飞速发展,汽车工业正经历着一场前所未有的技术革命。
汽车底盘线控与动力学域控制技术作为这场革命的重要组成部分,正逐渐改变着我们对传统汽车驾驶方式的认知。
本文旨在深入探讨这一领域的最新发展,分析其技术原理、应用现状以及未来趋势,以期为汽车行业的创新与发展提供有益的参考。
本文将概述汽车底盘线控技术的基本概念、特点及其在汽车动力学中的作用。
底盘线控技术是指通过电子控制系统实现对汽车底盘系统的精确控制,包括转向、制动、悬挂等多个方面。
这种技术能够显著提高汽车的操控性、稳定性和舒适性,为驾驶者带来更加安全、便捷的驾驶体验。
本文将重点介绍动力学域控制技术的原理及其在汽车底盘线控中的应用。
动力学域控制技术是一种基于多变量控制理论的高级底盘控制技术,它通过对车辆动力学状态的实时监测和预测,实现对车辆运动状态的精确控制。
这种技术能够显著提高车辆在复杂路况下的稳定性和安全性,为驾驶者提供更加稳定、舒适的驾驶环境。
本文将展望汽车底盘线控与动力学域控制技术的未来发展趋势。
随着、大数据等前沿技术的不断发展,未来的底盘线控与动力学域控制技术将更加智能化、自适应化。
它们将与车辆其他系统实现更加紧密的融合,共同推动汽车行业的智能化、绿色化、安全化发展。
汽车底盘线控与动力学域控制技术是汽车工业发展的重要方向之一。
本文将从技术原理、应用现状和未来趋势等多个方面对其进行深入探讨,以期为汽车行业的创新与发展提供有益的参考。
二、汽车底盘线控技术随着电子技术的发展,汽车底盘控制技术正逐渐从传统的机械控制向线控技术转变。
汽车底盘线控技术,也称为线控底盘系统,是指通过电子控制单元(ECU)和传感器,实现对汽车底盘系统的精确控制。
这一技术主要涉及线控转向、线控制动和线控悬挂等几个方面。
线控转向系统(SBW,Steer-By-Wire):SBW系统取消了传统的机械转向装置,完全由电子系统控制转向。
6-2汽车底盘线控系统基本结构与控制原理认知

新课导入
未来高阶自动驾驶将基于底盘线控技术来实现。汽车传统机械连接装置将被 以电信号驱动的传感器、控制单元及执行机构取代。汽车底盘线控系统是如 何在汽车上工作的?
新课讲授
一.汽车线控底盘
智能汽车线控底盘主要包括线控转向、线控制动、线控驱动、线控换挡和线控悬架五大系统。线控转 向和线控制动是自动驾驶执行端方向最核心的系统。
二.汽车线控底盘结构与工作原理
4.线控换挡系统 线控换挡系统,主要由换挡操纵机构、换挡ECU、换挡执行块、变速器控制ECU和挡位指示器等组成。
二.汽车线控底盘的结构与工作原理
5.线控悬架系统 线控悬架系统,主要由模式选择开关、传感器、悬 架ECU和执行机构等部分组成。
三.任务实施
1.车辆线控原理演示 2.验证线控转向、线控制动和线控驱动系统 (1)车辆在正常行驶时,线控实训台开启驱动模式; (2)当前方出现动态障碍物时,线控实训台切换至减速模式; (3)当前方动态障碍物消失时,线控实训台切换至正常行驶模式; (4)前方出现红灯时,线控实训台切换至制动模式; (5)前方红灯变为绿灯时,线控实训台切换至驱动模式; 3.检测线控转向系统和线控驱动系统 (1)使用示波器进行电机驱动系统检测,记录输出线控信号量。 (2)转向系统检测并记录线控输出信号量。
6-2汽车底盘线控系统基本结构 与控制原理认知
学习目标
1.知识目标 (1)掌握线控底盘五大系统的组成; (2)熟悉线控底盘的控制原理; 2.能力目标 (1)能向客户介绍线控底盘的组件及工作原理; (2)能正确使用检测设备的能力。 3.素质目标 (1)树立自主学习意识和终生学习意识; (2)培养分析问题和解决问题能力;
二.汽车线控底盘的结构与工作原理
1.线控转向系统 线控转向系统取消了传统的机械式转向装置,转向器与转向柱间无机械连接。线控转向系统主要由 方向盘模块、转向执行模块和ECU三个主要部分以及自动防故障系统、电源系统等辅助模块组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动驾驶之底盘线控
1.底盘线控
自动驾驶汽车的感知、决策、控制三大单元中,和传统汽车行业贴合最近的就是控制执行端,包括驱动控制、转向控制、制动控制等。
自动驾驶的决策是由传感器根据实际的道路状况而输出,都是电信号,这就需要传统汽车的底盘进行线控的改造
而适用于自动驾驶。
面向自动驾驶线控底盘组成
线控底盘主要有五大系统,分别为线控转向、线控制动、线控换挡、线控油门、线控悬挂。
而转向和制动则是面向自动驾驶执行端方向最核心的产品,线控制动技术难度最高。
从执行端来看,线控油门、线控换挡、线控空气悬挂虽然技术都很成熟了,但最为关键的转向和制动系统目前还没有一套可以适用于L4驾驶的稳定的量产产品。
2.线控制动
近一百年来,汽车制动系统经历了从机械到液压再到电子(ABS/ESC)的进化过程,未来的发展趋势将是线控制动。
线控制动响应更快,是实现自动驾驶安全的重
要保障。
BBW(Brake by Wire)线控制动系统也分为两种类型:
•EHB: Electro Hydraulic Brake(液压式线控制动)以传统的液压制动系统为基础,用电子器件取代了一部分机械部件的功能,使用制动液作为动力传递媒介,控制单元及执行机构布置的比较集中,有液压备份系统,也可以称之为集中式、湿式制动系统。
EHB的工作原理:正常工作时,制动踏板与制动器之间的液压连接断开,备用阀处于关闭状态。
电子踏板配有踏板感觉模拟器和电子传感器,ECU可以通过传感器信号判断驾驶员的制动意图,并通过点击驱动液压泵进行制动。
电子系统发生故障时,备用阀打开,EHB系统变成传统的液压系统。
EHB根据技术方向还分为三类:1.电动伺服:电机驱动主缸提供制动液压力源,代表产品Bosch Ibooster, NSK2.电液伺服:采用电机+泵提供制动压力源,代表产品Continental MK C1, 日立3.电机+高压蓄能器电液伺服:ADVICS ECB以上关键部件包括:电机、电磁阀、油泵、电液控制单元、蓄能器,这些部件集成在一起,形成了机电液集成程度非常高的EHB产品。
按照结构集成程度,EHB可以分为分立式(two-box)和整体式(one-box),其主要区别是主动增压模块(一般由电机驱动)和分泵压力调节模块(ABS/ESC总成)是否集成在一起。
•EMB: Electro Mechanical Brake(机械式线控制动)采用电子机械装置代替液压管路,执行机构通常安在轮边,也可称为:分布式、干式制动系统。
EMB的工作原理:EMB系统的ECU根据制动踏板传感器信号及车速等车辆状态信号,驱动和控制执行机构电机来产生所需要的制动力。
线控制动系统执行信息由电信号传递,相对来讲制动压力相应的更快,进而刹车距离更短更安全,车辆操控性更好。
L2
时代的线控制动可以分为燃油车、混动、纯电三大类,燃油车大都采用
ESP(ESC),混动车基本都采用高压蓄能器为核心的间接型EHB(电液压制动),纯电车基本都采用直接型EHB,以电机直接推动主缸活塞。
3.线控制动优缺点
线控制动系统的优势:
•导线取代冗长的液压管路,制动响应速度快(500~600ms ->100~150ms)
•质量轻,体积小
•无制动液,便于维护
•便于扩展其它电控功能,使用Flexray通讯协议
EMB技术难点:1.没有备份系统,对可靠性要求极高。
2.刹车力不足3.工作环境恶劣,制动器需要能够耐高温,质量轻,成本低4.需要更好的抗干扰能力,抵制车辆运行中遇到的各种干扰信号5.需要针对底盘开发对应的系统,难以模块化设计,导致开发成本极高。
EMB技术优势:1.响应时间更短,大幅度缩短刹车距离,安全优势极为突出2.体积更小:省去液压管路的体积3.没有液压系统,不会有液体泄漏,对电动车来说尤其重要,同时成本和维护费用低线控制动,EHB国外厂商技术发展已经比较成熟,但严格意义讲还不适应于L4自动驾驶,国内此项技术在努力追赶;EMB还处在研究阶段,目前看较难有突破。
4.线控制动自动驾驶中的应用
制动控制是自动驾驶执行系统的重要部分,目前ADAS 与制动系统高度关联的功能模块包括ESP(车身稳定系统)/AP(自动泊车)/ACC(自适应巡航)/AEB (自动紧急制动)等。
防抱制动系统(ABS)已经广泛使用,ABS主要由ECU控制单元、车轮转速传感器、制动压力调节装置和制动控制电路等部分组成。
在制动过程中,ABS控制单元不断从车轮速度传感器获取车轮的速度信号,并进行处理,进而判断车轮是否即将被抱死。
当车轮趋近于抱死临界点时,制动分泵压力不随制动主泵压力增加而增高,压力在抱死临界点附近变化,从而避免车轮抱死,减少了危险事故的发生。
车身稳定控制系统(ESP)ESP主要由控制总成ECU、转向传感器、车轮传感器、侧滑传感器、横向加速度传感器等组成。
当汽车快速行驶或者转向时,产生的横向作用力会使汽车不稳定,易发生事故,而ESP系统可以将这种情况防患于未然。
5.产业
EHB国外厂商技术发展已经比较成熟,国内在努力追赶;EMB还处在研究阶段,目
前看短期较难有突破。
目前线控制动系统的主要供应商包括博世、采埃孚、大陆等国际零部件巨头企业,大都从20世纪90年底开始研发,在底盘控制领域具有丰富的技术积累和供货经验,具有一定的先发优势。
从2000年开始,国内一些自主整车企业和零部件供应商就开始进行EHB的研发,目前已取得一定成果。
虽然与博世等国际巨头仍存在一定差距,但产业尚处于发展早期阶段,还有较大的追赶机会。
从竞争要素来看,线控制动产品技术含量较高,且需要较长投入期,因此对于人才、技术和资本要求较高。
目前国内发展相对较好的有伯特利、拓普集团、万安科技等,兼备人才、技术和资本等优势,有望在未来的市场竞争中获得一席之地。