第1章多自由度系统的固有振动特性
《机械振动学》教学大纲

《机械振动学》教学大纲一、一、课程性质和目标机械振动学是机械设计、制造及自动化专业的一门专业选修课,总学时32,学分3.2。
随着机器生产率的不断提高,导致了载荷的速度和加速度的增加,这就使得机械动力学的问题变得日益突出起来,机械动力学的一个重要组成部分机械振动同样也不会例外。
本课程就是为了适应生产实际的需要,为大学本科高年级学生开设的一门技术基础课。
本课程着重从工程实际的角度对机械振动的有关理论进行讨论,使学生在掌握基本理论的基础上,能够把工程中的实际机械抽象为力学模型,然后在正确的力学模型基础上运用已有的知识进行正确的力学分析,解决一些工程实际的问题,达到学与用的统一。
二、二、先选课程或知识理论力学、材料力学、高等数学、线性代数和相关的专业知识等。
三、三、教学内容基本要求绪论(1学时)第一章第一章单自由度系统的振动(10学时)振动系统的力学模型及自由度的概念;弹性元件的形式和刚度;振动微分方程的推导;无阻尼自由振动;固有频率的计算;粘性阻尼对自由振动的影响;无阻尼受迫振动;具有粘性阻尼的受迫振动;等效粘性阻尼的概念;单自由度系统振动的利用及振动分析;单自由度系统的减动;机械结构的动应力和动刚度的概念。
第二章第二章二自由度系统的振动(8学时)应用动静法建立方程式;应用拉格朗日方程建立方程式;振动方程的一般形式及其矩阵表示法;无阻尼二自由度系统的自由振动;无阻尼二自由度系统的受迫振动;具有粘性阻尼的二自由度系统的自由振动;具有粘性阻尼的二自由度系统的受迫振动;二自由度振动系统的利用及振动机械的振动分析;振动机械及测试机器的二次隔振;动力减振原理与动力减振器。
第三章第三章多自由度系统的自由振动(6学时)多自由度系统举例;刚度矩阵与刚度影响系数;柔度矩阵与柔度影响系数;惯性藕联和弹性藕联;固有频率与振型矩阵。
第四章第四章多自由度系统的受迫振动(3学时)无阻尼系统受迫振动的响应;多自由度系统的阻尼。
四、实践性环节基本要求25个自由度系统的计算机辅助振动分析4学时五、课程考核要求由主讲教师自定考核。
汽车振动基础第4章-多自由度(定稿)
k11 k1 x1 k2 x1 k1 k2
k21 k12 k2 x1 k2
k22 k2 x2 k3 x2 k2 k3
j2
k31 k13 0
k32 k23 k3 x2 k3
0 k1 k 2 k 2 K k 2 k 2 k3 k3 0 k3 k3
– 拉格朗日法
• 方程的形式
广义坐标
qi (i 1, 2,3,, n)
T:系统的总动能
d T T ( ) Qi 0 dt qi qi
i 1, 2,3, , n
对应于第i个广义 坐标的广义力
– 保守系统
» 系统作用的主动力仅为势力 Qi
d T T U ( ) 0 dt qi qi qi
m2 m22 m3 4
④柔度矩阵的影响系数法
F ij
柔度影响系数 ij 的意义是在第j个坐标上施加单位力作用时,在第i个坐 标上引起的位移。 例题4-8 用影响系数法求图示系统的柔度矩阵
11 F 21 31
12 22 32
13 23 33
也可写成 其中
或
或
MX KX 0
力方程 位移方程
K 1MX X 0
m x 0 或 x
称为柔度,而
FMX X 0
1 称为柔度矩阵
1 k
FK
②刚度矩阵的影响系数法
K kij
刚度影响系数 k 的意义是使系统的第j个坐标产生单位位移,而其它的 ij 坐标位移为零时,在第i个坐标上所施加的作用力的大小。
仅代表外部激励 广义力
汽车振动分析
汽车振动分析编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(汽车振动分析)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为汽车振动分析的全部内容。
研究生试卷2013 年—2014年度第 2 学期评分:______________________课程名称:振动理论专业:车辆工程年级: 2013级任课教师:李伟研究生姓名:王荣学号: 2130940008注意事项1.答题必须写清题号;2.字迹要清楚,保持卷面清洁;3.试题随试卷交回;4.考试课按百分制评分,考查课可按五级分制评分;5.阅完卷后,授课教师一周内将成绩在网上登记并打印签名后,送研究生部备案;6.试题、试卷请授课教师保留三年被查。
《汽车振动分析》总结王荣(重庆交通大学机电与汽车工程学院重庆 400074)摘要:本课程由浅入深、循序渐进,从单自由度系统的简单问题逐渐加深到多自由度的分析,甚至是无限自由度系统,并从简单激励的振系逐渐推广到随机激振振系。
作为汽车理论及汽车设计等课程的基础,其对于分析汽车的行驶平顺性、乘坐舒适性、发动机的减振和隔离等具有良好的参考价值。
关键词:单自由度;多自由度;简单激振;随机激振The Conclusion of “Automotive VibrationAnalysis”Abstract: The course progressively, step by step, gradually discusses from the simple question of a single degree of freedom system to the analysis of a multi—degree of freedom system, even to the analysis of the infinite degree of freedom system. In addition, the course extends from simple energized vibration system to random energized vibration system. As the basis of Vehicle Theory and Vehicle Design, this course has direct reference value for the analysis of vehicle ride, comfort of passenger, engine vibration damping and isolation.Keywords:Single-Degree—of-Freedom; Multi—Degree—of—Freedom; Simple Energized Vibration System ;Random Energized Vibration System0 引言随着科学技术的日新月异和人民生活水平的日益提高,人们对汽车的动态性能,例如:汽车行驶的舒适性,操纵的稳定性,车内噪声水平及音质等等——提出了愈来愈高的要求。
多自由度系统近似计算方法

在线性多自由度系统振动中,振动问题归结为刚度矩阵和质量矩阵的广义特征值问题,缺点:当系统自由度较大时,求解计算工作量非常大。
本章介绍邓克利法,瑞利法,里茨法,传递矩阵法等计算方法,可作为实用的工程计算方法对系统的振动特性作近似计算。
1、邓克利法由邓克利(Dunkerley )在实验确定多圆盘的横向振动固有频率时提出的,便于作为系统基频的计算公式 。
自由振动作用力方程:0KX XM =+ n R ∈X 左乘柔度矩阵F = K -1,位移方程:0X X FM =+ 定义D=FM 为系统的动力矩阵:0X XD =+ 作用力方程的特征值问题:φφM K 2ω= 位移方程的特征值问题:φφλ=D 特征值:22221n ωωω<<< ,n λλλ>>> 21 关系:2/1i i ωλ=位移方程的最大特征根:211/1ωλ=,对应着系统的第一阶固有频率。
位移方程的特征方程:0=-I D λ展开:0)()1(1111=++++---n n n nna a a λλλD tr d d d a nn -=+++-=)(22111例:022211211=--λλd d d d0)]()([)1(21122211221122=-++--d d d d d d λλ当 M 为对角阵时:)(FM D tr tr =∑==ni iii m f 1特征方程又可写为:0)())((21=---n λλλλλλ有:∑=-=ni i a 11λtrD -=∑=-=ni i ii m f 1∑∑===ni iii ni im f 11λ∑∑===ni i ii ni im f 1121ω如果只保留第 i 个质量,所得的单自由度系统的固有频率为:iii ii i m f m k 12==ω例:两自由度系统柔度矩阵:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+=2111111111k k k k kF (1)只保留 m 1 时1111k f =,1121m k =ω(2)只保留 m 2 时122122111k k k f =+=,21222m k =ω将2i ω代入:22221121111nni iωωωω+++=∑=对于梁结构系统,第二阶及第二阶以上的固有频率通常远大于基频,因此左端可只保留基频项,有:22221211111nωωωω+++≈例:三自由度系统⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡0002223101220010*********x x x k x x x m 采用常规方法,固有频率:m k /3730.01=ω,m k /3213.12=ω,m k /0286.23=ω邓克利法当 m1 单独存在时:m k /21=ω 当 m2 单独存在时:k k k k k k 21212112=+=,m k /1222=ω当 m3 单独存在时:kk k k k 251111321123=++=,52123k k =,mk 523=ω代入邓克利法公式:22221211111nωωωω+++≈,mk /3535.01=ω2、瑞利法瑞利法是基于能量原理的一种近似方法,可用于计算系统的基频,算出的近似值为实际基频的上限,配合邓克利法算出的基频下限,可以估计实际基频的大致范围。
飞行器结构动力学_第1章_2014版 [兼容模式]
![飞行器结构动力学_第1章_2014版 [兼容模式]](https://img.taocdn.com/s3/m/1a6d4b0ede80d4d8d15a4f4f.png)
– 第四章:连续系统
• 杆的振动 轴的振动 • 梁的振动 薄板振动
– 第五章:结构动力学建模
• 有限元模型建立(第6章) • 结构模态分析(第7章)
第1章 概 论
第1章 概 论
现代有限元分析——结果
第1章 概 论
实验手段
地面静力实验
第1章 概 论
地面振动实验(Ground Vibration Test,GVT)
• 确保边界条件 • 激励方式
第1章 概 论
• 传感器布置 • 信号处理
F-16 GVT悬吊
第1章 概 论
风洞实验——颤振
第1章 概 论
NASA兰利
第1章 概 论
结构动力学建模(2)
• 原则 – 保持原有系统的动力学特性(或近似) – 必须和观察到的实际模型尽可能相似
• 初步设计阶段可采用一定简化,详细设计阶段 尽可能细化
• 方法 – 1.集中参数描述的离散系统 – 2.分布参数描述 – 3.两种方法的混合
• 例子: – 导弹在空中飞行;飞机在空中飞行
• 量子场理论(quantum field theory,QFT):具有很多自由度的量子一级
的问题 第1章 概 论
背景知识(续)
牛顿
• 牛顿三定律
– 奠定了经典力学基础 • 《自然哲学的数学原理》
– 对第2、3定律给出了合理的科学和数学描述 – 阐述了动量守恒和角动量守恒原理 • 万有引力定律 – 最先给出引力的科学、准确的表达式 • 牛顿运动定律和万有引力定律 – 对经典力学进行了最完整和最准确的描述 – 适用于日常物体和天体 • 发明了微积分 – 莱布尼茨发明了现在常用的求导和积分符号
工程力学中的自由振动和强迫振动的特性

工程力学中的自由振动和强迫振动的特性在工程力学中,振动是一个重要的研究领域。
振动被广泛应用于各种工程中,包括建筑结构、机械系统以及电子设备等。
振动可以分为自由振动和强迫振动两种类型。
本文将讨论自由振动和强迫振动的特性以及它们在工程中的应用。
一、自由振动的特性自由振动是指在没有外界干扰的情况下,结构或系统在其固有频率下进行的振动。
自由振动的特性主要包括振幅、周期、频率和阻尼等。
1. 振幅振幅是指振动的最大偏离量。
在自由振动中,振幅受到初始条件的影响,振幅越大,振动的能量也就越大。
2. 周期周期是指振动完成一个完整循环所需的时间。
自由振动的周期与结构的固有频率有关,固有频率越高,周期越短。
3. 频率频率是指振动单位时间内完成的循环次数。
频率是周期的倒数,用赫兹(Hz)表示。
自由振动的频率与周期相反,固有频率越高,频率越大。
4. 阻尼阻尼是指振动过程中能量的消耗。
在自由振动中,存在三种类型的阻尼:无阻尼、过阻尼和欠阻尼。
无阻尼振动指没有能量损耗的理想振动;过阻尼振动是指能量损耗过大,振动停止得很慢;欠阻尼振动是指振动的能量损耗较小,但是在振动停止时存在振荡。
二、强迫振动的特性强迫振动是指受到外界周期性力作用下的振动。
外界力的频率通常不等于结构的固有频率,因此会引发结构的共振。
强迫振动的特性主要包括固有频率、共振和受迫振动等。
1. 固有频率固有频率指的是结构或系统在自由振动状态下的固有频率。
在强迫振动中,结构的固有频率决定了其对外界激励的响应。
2. 共振共振是指外界力的频率与结构的固有频率相等或接近,导致结构振幅迅速增大的现象。
共振现象对于某些结构来说是有害的,因为会导致结构破坏或崩溃。
3. 受迫振动受迫振动是指在强迫振动中,结构受到外界激励而发生的振动。
外界激励可以是周期性的力或者者是其他形式的周期性变量。
三、自由振动和强迫振动在工程中的应用自由振动和强迫振动在工程中有着广泛的应用。
1. 自由振动的应用自由振动的研究可以用于建立结构的固有频率,通过调节结构的初始条件和强度来影响振动的特性。
机械振动学总结全
机械振动学总结 第一章 机械振动学基础第二节 机械振动的运动学概念第三节机械振动是种特殊形式的运动。
在这运动过程中,机械振动系统将围绕其平衡位置作往复运动。
从运动学的观点看,机械振动式研究机械系统的某些物理量在某一数值近旁随时间t 变化的规律。
用函数关系式来描述其运动。
如果运动的函数值,对于相差常数T 的不同时间有相同的数值,亦即可以用周期函数来表示,则这一个运动时周期运动。
其中T 的最小值叫做振动的周期,Tf 1=定义为振动的频率。
简谐振动式最简单的振动,也是最简单的周期运动。
一、简谐振动物体作简谐振动时,位移x 和时间t 的关系可用三角函数的表示为式中:A 为振幅,T 为周期,ϕ和ψ称为初相角。
如图所示的正弦波形表示了上式所描述的运动,角速度ω称为简谐振动的角频率简谐振动的速度和加速度就是位移表达式关于时间t 的一阶和二阶导数,即可见,若位移为简谐函数,其速度和加速度也是简谐函数,且具有相同的频率。
因此在物体运动前加速度是最早出现的量。
可以看出,简谐振动的加速度,其大小与位移成正比,而方向与位移相反,始终指向平衡位置。
这是简谐振动的重要特征。
在振动分析中,有时我们用旋转矢量来表示简谐振动。
图P6旋转矢量的模为振幅A ,角速度为角频率ω若用复数来表示,则有)sin()cos()(ψωψωψω+++==+t jA t A z Ae z t j用复指数形式描述简谐振动,给计算带来了很多方便。
因为复指数t j e ω对时间求导一次相当于在其前乘以ωj ,而每乘一次j ,相当于有初相角2π。
二.周期振动满足以下条件:1)函数在一个周期内连续或只有有限个间断点,且间断点上函数左右极限存在;2)在一个周期内,只有有限个极大和极小值。
则都可展成Fourier 级数的形式,若周期为T 的周期振动函数,则有式中22n n n b a A += nn n b a =ψt a n 三、简谐振动的合成一、同方向振动的合成1.俩个同频率的简谐振动)sin(222ψω+=t A x ,)sin(2222ψω+=t A x它们的合成运动也是该频率的简谐振动2.俩个不同频率振动的合成若21ωω≤,则合成运动为若21ωω≥ ,对于A A A ==21 ,则有上式可表示为二、两垂直方向振动的合成1.同频率振动的合成如果沿x 方向的运动为沿y 方向的运动为2不同频率振动的合成对于俩个不等的简谐运动它们的合成运动也能在矩形中画出各种曲线。
多自由度系统的振动、响应和求解
D k vD
B Q2
A Q1
k vA
位移图
受力图
图(b) v21, v1v30时板的位移和受力图
(2)求刚度矩阵第二列 参见图 b,可得板的力平衡方程:
Q3 kvA kvD 0 Q1L (kvA kvD) L 0 Q1 Q2 kvE 0
;其中
k
12EI L3
解得 Q 1 2 k , Q 2 3 k , Q 3 0
微振动时, i ,
&
i
为小量,将以上能量保留到二阶小量,得
(注意:为了得到线性振动方程,能量表达式必须保留 到二阶微量)
T 12ml2[3&12 2&22 &32 4&1&2 2&2&3 2&3&1]
3
12ml2{&1,&2,&3}2
1
2 2 1
11&&12 1&3
V
1 2
mgl
(312
222
简支梁在横向集中力作用下的挠度公式为
P
f Pb(xl2x2b2), 0xa 6EIl
x
a
b
l
f Pb[l(xa)3(l2b2)xx3], axl
6EIlb
例4.1 写出图示梁的柔度矩阵,梁的抗弯刚度为EI。如果 将梁的质量按分段区间均分到区间的两个端点,写出梁的质
量矩阵,设梁单位长度的质量为 l。
;其中
k
12EI L3
Q1 Q2
2 2
(kvA
kvD
)
0
解得 Q 1 4 k , Q 2 2 k , Q 3 0
因此,刚度矩阵第一列为
机械动力学第1、2章

2
2
1 2 2 1 d n 根据 Td 2 k mn cc 2mn
ln(16) 2.7726
k 200 3.43382 2358.2652( N / m) cc 2 200 3.4338 1373.54( N s / m) c cc 0.4037 1373.54 554.4981( N s / m)
第一章 单自由度系统
• • • • •
常用的推导动力学方程的方法 牛顿第二定律 达朗贝尔原理 虚位移原理 能量守恒原理
无阻尼自由振动
1.无阻尼自由振动解
如果一个质点偏离其平衡位置的距离 为 xm, 则其将进行自由振动,有牛顿 定律,质点力的平衡方程为
ma F W k st x kx
高塔消振 高塔消振 台北 101 大厦内部装有阻尼耗能减振器 台北 101 大厦内部装有阻尼耗能减振器
有阻尼自由振动的应用
网球 (( 羽毛球 )) 拍消 网球 羽毛球 拍消 网球拍或羽毛球拍在击球后产生自由振动,若不在 网球拍或羽毛球拍在击球后产生自由振动,若不在 下次击球之前停止振动,将影响再次击球的方向和 下次击球之前停止振动,将影响再次击球的方向和 角度,为此在铁合金管外面绕上石墨纤维,并在其 角度,为此在铁合金管外面绕上石墨纤维,并在其 外面用塑料捆扎住,石墨纤维外表面的库仑阻尼, 外面用塑料捆扎住,石墨纤维外表面的库仑阻尼, 使球拍在击球后,以最快的时间稳定下来 使球拍在击球后,以最快的时间稳定下来
p103
【解】由于x1.5=x1/4, 因而x2=x1/16
n t2
x1 Ae nt1 sin( 1 2 n t1 ) x2 Ae
第一章模态分析理论基础

共振频率点
ds max d 1
• 粘滞阻尼系统
– Nyquist图
2
2
[H
R
( )]2
(H
I
( ))2
1
4k
1
4k
» 特点
»桃子形,阻尼比越小
轨迹圆越大
» ( 是变的,所以不是圆 )
在固有频率附近,曲线 接近圆,仍可利用圆
的特性
第20页/共60页
速度与加速度频响函数特性曲线
• 关系回顾
HR 1, 2
(
)
4k
1 (1
)
2
1
g
2
半功率带宽反映阻尼大小 阻尼越大,半功率带宽
越大,反之亦然
第17页/共60页
• 虚频图
• •
H
I
( )
g
k[(1 2 )2
(结构阻尼) (g粘2 ] 性阻尼)
• 以H结I构(阻) 尼k[为(1例:2 )22(2 )2 ]
– 系统共振时虚部达到最大值
– 系统共振时实部为零
m1
机架线
第30页/共60页
• 一般多自由度约束系统
机架线
– N自由度约束系统有N个共振频率,(N-1)个反共振频率 – 对原点函数共振反共振交替出现 – 对跨点频响函数无此规律 – 一般两个距离远的跨点出现反共振的机会比较近的跨点少
第31页/共60页
– 自由系统
• 两自由度系统运动方程(无阻尼)
第7页/共60页
单自由度系统频响函数分析
粘性阻尼系统
•阻尼力(与振动速度成正比):
•强迫fd振动方c程x 及其解
..
.
m x•解c的x形式k(xs为复f 数)及拉氏变换:
多自由度(线性)阻尼系统振动讲义
第3章 多自由度线性系统的振动 3. 1 振动微分方程 3 多自由度线性系统的振动
例3.2 建立三自由度系统的振动微分方程
柔度系数:单位外力所引起的系统位移 ,定 义系统第j个坐标上作用的单位力在第i个广 义坐标上所引起的位移为柔度系数 h 。 ij
三自由度系统
在质量m 上施加单位力,质量m 、 m 和m 的位移: x =1/k , x =1/k , 1 1 2 3 1 1 2 1 x =1/k ,即h = h = k = 1/k ; 3 1 11 21 31 1 在质量m 上施加单位力,质量m 、 m 和m 的位移: x =1/k , 2 1 2 3 1 1 x =1/k +1/k , x = 1/k +1/k ,即柔度系数h = 1/k , h = k = 1/k +1/k ,; 2 1 2 3 1 2 12 1 22 32 1 2 在质量m 上施加单位力,质量m 、 m 和m 的位移: x =1/k , 3 1 2 3 1 1 x =1/k +1/k , x =1/k +1/k +1/k 。即柔度系数x =1/k , x =1/k +1/k , x = 2 1 2 3 1 2 3 1 1 2 1 2 3 1/k +1/k +1/k 。 1 2 é1 3 ù 1 1 振动 ê k m x ü k k ú é 1 0 0 ùì &&1 ü ì x ü ì 0 1 1 1 1 ï ê ú ê 0 m 0 ú ï && ï +ï x ï =ï0 1 1 + 1 x ý í 2 ý í ý 微分 ê 1 k 1 k + k 2 ú í 2 úê k k 1 1 2 1 2 ï ï ï ï ï ï 1 + 1 1 +1 + 1 ú ê 0 0 m ú î&&3 þ îx þ î0 3 û x 3 ë þ 方程 ê 1 ê k k k k k k ú 1 2 1 2 3 û ë 1
结构动力学问答题答案 武汉理工 研究生
《结构动力学》思考题第1章1、对于任一振动系统,可划分为由激励、系统和响应三部分组成。
试结合生活或工程分别举例说明:何为响应求解、环境识别和系统识别?响应求解:结构系统和荷载已知,求响应。
又称响应预估问题,是工程正问题的一种,通常在工程中是指结构系统已知,具体指结构的形状构件及离散元件等,环境识别:主要是荷载的识别,结构和响应已知,求荷载。
属于工程反问题的一种。
在工程中,如已知桥梁的结构和响应,根据这些来反推出桥梁所受到的荷载。
系统识别:荷载和响应已知,求结构的参数或数学模型。
又称为参数识别,是工程反问题的一种,在土木工程领域,房屋、桥梁和大坝等工程结构被视为“系统”,而“识别”意味着由振动实验数据求得结构的动力特性(如频率、阻尼比和振型)。
如模态分析和模态试验技术等基本成型并得到广泛应用。
2、如何从物理意义上理解线性振动系统 解的可叠加性。
求补充!!!!!3、正确理解等效刚度的概念,并求解单自由度系统的固有频率。
复杂系统中存在多个弹性元件时,用等效弹性元件来代替原来所有的弹性元件,等效原则是等效元件刚度等于组合元件刚度,则等效元件的刚度称为等效刚度。
4、正确理解固有频率f 和圆频率ω的物理意义。
固有频率f :物体做自由振动时,振动的频率与初始条件无关,而仅与系统的本身的参数有关(如质量、形状、材质等),它是自由振动周期的倒数,表示单位时间内振动的次数。
圆频率ω: ω=2π/T=2πf 。
即为单位时间内位移矢量在复平面内转动的弧度,又叫做角频率。
它只与系统本身的参数m ,k 有关,而与初始条件无关5、正确理解过阻尼、临界阻尼、欠阻尼的概念。
一个系统受初扰动后不再受外界激励,因为受到阻力造成能量损失而位移峰值渐减的振动称为阻尼振动。
系统的状态按照阻尼比ζ来划分。
把ζ=0的情况称为无阻尼,即周期运动;把0<ζ<1的情况称为欠阻尼,即系统所受的阻尼力较小,振幅在逐渐减小,最后才达到平衡位置;把ζ>1的情况称为过阻尼,如果阻尼再增大,系统需要较长的时间才能达到平衡;把ζ=1的情况称为临界阻尼,即阻尼的大小刚好使系统作非"周期"运动。
第16章 线性振动的基本理论

讨论:小阻尼振动时的特点
a.周期与振动频率
小阻尼自由振动是一种周期运动,若将质点从一个 最大偏离位置到下一个最大偏离位置所需的时间称 为衰减振动的周期,记为Td,则由式(16-11)可得
2 2
Td
d
n2 2
(16-14)
线性振动的基本理论
第 1节 单自由度系统的自由振动
衰减振动的振动频率fd表示每秒振动的次数,它与 周期的关系为
(16-7)
式中δ为阻尼系数。
式(16-7)是单自由度系统有阻尼自由振动微分方程 的标准形式。它是一个二阶常系数线性齐次微分方程, 其解可设为q=en,代入式(16-7)后得特征方程
r 2 2r n2 0
(a)
线性振动的基本理论
第 1节 单自由度系统的自由振动
特征方程的两个根为
r1
r2
F=ρg·sq
(16-2)
式中ρ为液体的密度,s为物体的水截面积。可见, ρgs相当于刚度系数k。对于图16-3所示系统,根据 弹性梁挠曲线方程,可以得到等效的刚度系数。
k 3EI l3
(16-3)
式中EI为梁的刚度,l为梁(支架)长,恢复力可由
式(16-1)得到。
线性振动的基本理论
第 1节 单自由度系统的自由振动
(16-13)
线性振动的基本理论
第 1节 单自由度系统的自由振动
由式(16-11)画出的振动曲线如图16-6所示。
图16-6 小阻尼时的运动图线
由图16-6可知,物体在其平衡位置附近作往复运 动,但已不是作等幅的简谐运动了,而是按指数 规律衰减,故称为衰减振动。
线性振动的基本理论
第 1节 单自由度系统的自由振动
设在t=t1时的振幅为A1,t=t+10Td时振幅为A11,将 式(16-17)连乘10次,有
机械振动实验指导书
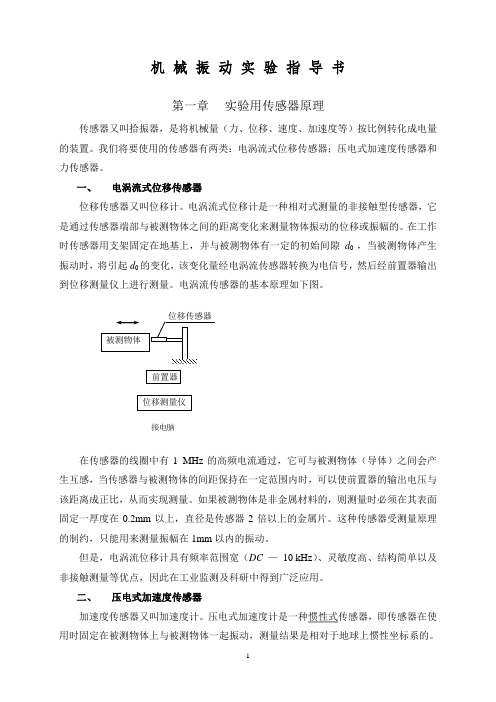
机 械 振 动 实 验 指 导 书第一章 实验用传感器原理传感器又叫拾振器,是将机械量(力、位移、速度、加速度等)按比例转化成电量的装置。
我们将要使用的传感器有两类:电涡流式位移传感器;压电式加速度传感器和力传感器。
一、电涡流式位移传感器位移传感器又叫位移计。
电涡流式位移计是一种相对式测量的非接触型传感器,它是通过传感器端部与被测物体之间的距离变化来测量物体振动的位移或振幅的。
在工作时传感器用支架固定在地基上,并与被测物体有一定的初始间隙d 0 ,当被测物体产生振动时,将引起d 0的变化,该变化量经电涡流传感器转换为电信号,然后经前置器输出到位移测量仪上进行测量。
电涡流传感器的基本原理如下图。
在传感器的线圈中有1 MHz 的高频电流通过,它可与被测物体(导体)之间会产生互感,当传感器与被测物体的间距保持在一定范围内时,可以使前置器的输出电压与该距离成正比,从而实现测量。
如果被测物体是非金属材料的,则测量时必须在其表面固定一厚度在0.2mm 以上,直径是传感器2倍以上的金属片。
这种传感器受测量原理的制约,只能用来测量振幅在1mm 以内的振动。
但是,电涡流位移计具有频率范围宽(DC — 10 kHz )、灵敏度高、结构简单以及非接触测量等优点,因此在工业监测及科研中得到广泛应用。
二、压电式加速度传感器加速度传感器又叫加速度计。
压电式加速度计是一种惯性式传感器,即传感器在使被测物体位移测量仪前置器 接电脑用时固定在被测物体上与被测物体一起振动,测量结果是相对于地球上惯性坐标系的。
惯性式传感器的基本原理在机械振动的教材中已有介绍。
当ω/ωn<<1时,传感器内的质量块相对于其外壳的相对位移正比于被测物体的加速度幅值,因而传感器构成加速度计。
为了扩大加速度计的使用频率上限,应当尽可能提高加速度计本身的固有频率,一般压电式加速度计的固有频率可在20 kHz以上。
压电式加速度计利用压电晶体的压电效应来实现信号转换。
振动力学第1章自由振动资料
振动力学 Mechanics of Vibrations
§0.4 振动力学在工程中的应用
刘延柱 陈文良 陈立群
机械、电机工程中:振动部件的强度和刚度,机械的故障诊断, 精密仪器和设备的减振和降噪等。
交通、飞行器工程中:结构振动和疲劳分析,舒适性、操纵性 和稳定性问题等。
土建、地质工程中:建筑、桥梁等结构物的模态分析,地震引 起的动态响应,矿床探查、爆破技术的研究等。
振动力学 Mechanics of Vibrations
刘延柱 陈文良 陈立群
高等教育出版社
长征火箭
Higher Education Press
振动力学 Mechanics of Vibrations
刘延柱 陈文良 陈立群
高等教育出版社
长征火箭发射
Higher Education Press
振动力学 Mechanics of Vibrations
矮寨特大悬索桥钢桁梁
Higher Education Press
振动力学 Mechanics of Vibrations
刘延柱 陈文良 陈立群
高等教育出版社
矮寨特大悬索桥主缆架
Higher Education Press
振动力学 Mechanics of Vibrations
刘延柱 陈文良 陈立群
(b) 周期振动-响应是时间的周期函数。
(c) 准周期振动-若干个周期不可通约的简谐振动组合 而成的振动。 (d)混沌振动-响应为时间的始终有限的非周期函数。
(2) 随机振动-响应为时间的随机函数。
高等教育出版社
Higher Education Press
振动力学 Mechanics of Vibrations
第1章多自由度系统的固有振动特性
第一章多自由度系统的固有振动特性§1.1概述实际工程结构的振动往往用一个有限的多自由度振动系统来描述。
多自由度系统在数学上用一组常微分方程来描述,又称为集中参数系统。
因此研究多自由度系统振动特性是研究结构振动的基础和出发点。
§1.2 无阻尼系统的自由振动1.振动方程(1-1),为广义位移矢量2.质量矩阵物理意义动能(1-2)(1)质量矩阵反映了系统的动能(2)质量矩阵是正定的(3)质量矩阵是对称的例外:纯静态位移使(1-3)如在用有限元法建模时,采用非一致质量阵,则某些自由度上可能无质量项,此时质量阵不能保证正定。
即可以找到这样的一个位移向量使上式成立。
3.刚度矩阵的物理意义势能(1-4)(1)刚度矩阵反映了系统的势能(2)刚度矩阵是半正定的(刚体位移对应的势能为零)(3)刚度矩阵是对称的刚度矩阵的逆阵也有明确的物理意义——柔度矩阵使用刚度矩阵或柔度矩阵建立振动方程,分别称为“力法”、“位移法”4.特征方程各个自由度上的运动互不相同,但都是同频的简谐振动。
(1-5)求解上述方程是结构振动分析最基本的任务之一。
5.几个基本概念(1)固有频率特征方程的根为,即为固有频率,它反映了结构自由振动随时间的变化特性。
(2)固有模态或固有振型对应于特征方程根的特征矢量(1-6)它反映了结构自由振动在空间的变化特性。
(3)标准模态对固有模态归一化(1-7)则称为标准模态或归一化模态,模态归一化的方法有:1)置中某一分量为12)置中绝对值最大的分量为13)置模态质量为1,(1-8)(4)刚体模态:对应于(1-9)纯刚体模态:仅含有一种刚体运动(5)纯静态模态:使的模态,在非一致质量阵中,某些对角元素可以为零,可以找到一组位移使(1-10)(6)单频:称为单频。
(7)重频:称为重频,但相应有两个模态。
(8)密频或近频:通常当时,可以称为密频§1.3 固有频率与固有模态的特性1.正交性指模态对刚度矩阵[K]及质量阵[M]的加权正交性:(1-11)证明:由(1-12)分别前乘,然后相减并利用质量阵和刚度阵的对称性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
项,此时质量阵不能保证正定。即可以找到这样的一个位移向量使上式成立。
3.刚度矩阵的物理意义 势能
1t〜
au
u二{u} [ K ]{ u}_ 0
kijkji
(1-4)
2
ouicuj
(1)刚度矩阵反映了系统的势能
(2)刚度矩阵是半正定的(刚体位移对应的势能为零)
(3)刚度矩阵是对称的
(3)原系统任意两个相邻特征值之间必有一个新系统的特征值
(4)新系统任意两个相邻特征值之间必有一个原系统的特征值
(5)由有限元法给出的解是精确解的上界, 有限元的基本思想就是把一个 无穷维的问题“约束”为有限维。从而使频率提高。
(6)由瑞利假设模态法给出的解是精确解的上界,因为假设模态相当于对 结构增加约束得到的变形模态,从而使特征值增加。
1.瑞利法
(1)瑞利原理:
结构振动分析中,为了估计基频所使用的瑞利原理, 通常是对无阻尼系
(2)瑞利商R
11
Tmax2{X}T[M]{X},Umax{ X }?[ K ]{ X }(1一52)
22
2.与粘性阻尼有关的几个基本概念
(1)刚度型阻尼和质量型阻尼
若:-0,1 =0,则[Cm]「[M ]称为质量型阻尼
若U0,:•=0,则[Ck]二■:[K]称为刚度型阻尼 对质量型阻尼,模态阻尼比 :与’成反比;对刚度型阻尼, 与.r成正比。
定义振动位移响应的相邻两振幅之比
匕=_A^=e§Tdr
AsHr
©i=蛍j称国
i©j为重频,但相应有两个模态。
(8)
密频或近频:
i式j,«i
d通常当Oi-Oj<10-时,可以称为密频
§
1.正交性
指模态对刚度矩阵[K]及质量阵[M]的加权正交性:
{s}T[M ]{;}=0
{s}T[K]{;}=0
证明:由
分别前乘{ -s}T{:}T,然后相减并利用质量阵和刚度阵的对称性。
系统统特征方程
■:•2r;Tr'r亠心:=0(1—38)
方程的特征根:
\- -'/■'r2-1(1—39)
对过阻尼情况,r1,特征根都是负实根,系统运动不发生振动;
Cry2Mr,r=2KrMr(1—40)
此时系统也不发生振动;
对欠阻尼情况,;:::1,特征根为一对共轭复根:
'r1,'r2一-J'2-厂「一1一T(1—41)
则新系统特征值与原系统特征值之间的关系为:
o兰扎兰(11<爲兰 厂 乞…< 九N」gJNI兰九N(1—22)
当约束表现为增加系统刚度, 而不是减少自由度时,则新系统特征值与 原系统特征值之间的关系为:
o兰扎兰人"兰打兰宥兰…<打丄兰或兰九N兰阳N)(1—23)
即新系统特征值均大于原系统对应阶的特征值。
记矩阵
[Kj]二K;jC Mr「K;)二K;-jh;(1—45)
称为复刚度矩阵。
定义
h2
grI =L ■厂(1—46)
K;
为结构阻尼率,则运动方程:
-■2
q;…(1•jg;)q;=o(1—47)
特征方程:
s;2f::;2(i•jg;) =o(1—48)
解得:
s;=•;:;J■jg;(1—49)
泰勒展开:
为减缩系数
1
其倒数称为减幅率。
n
r
1
意义:每隔一个周期Tdr,振幅减缩为原来的
In%=&Tdr =竺二(1—35)
.J -'r2
上述参数从不同角度来衡量一个结构系统的阻尼特性。
3.阻尼阵的对角化处理
对瑞利阻尼,可以直接用模态矩阵使阻尼阵对角化, 对一般粘性阻尼阵[C],其一,在稀疏模态情况下,模态阻尼间耦合较小;其二,非共振区阻尼力的作 用较小,可以令非对角线元素为零。即令:
(4)特征值的序数对应着振动模态的阶次。
(Байду номын сангаас)特征值的有序性与特征值隔离定理有关系
4.特征值隔离定理(瑞利约束定理)
对一个N自由度系统,其固有频率(特征值)具有有序性,如果在这个 系统上增加一个约束,使其成为一个(N-1)自由度系统,则在新系统的特 征值仍然具有有序性即:
o兰打)兰以兰…<亿九(1)=仙⑴)2(1—21)
(3)对刚度型阻尼:粘性阻尼随模态阶次增大而增大,结构阻尼为常数
质量型阻尼:;=〉/ 2「;g; =〉/ •■:
§
结构的第一阶固有频率,工程称为基频。基频对一个结构的动力特性起 着至关重要的作用。对基频的估计(快速估计)是结构振动分析的一个重要 内容。
常用的估计基频的方法有瑞利法和邓克列方法, 分别给出基频精确解的 上界和下界。
(4)
(5)刚体模态:对应于
-^-0{'o}t[K]{ 'o^o
纯刚体模态:仅含有一种刚体运动
(5)纯静态模态:使[M]{u::}={0}的模态,在非一致质量阵中,某些对角
元素可以为零,可以找到一组位移使
[M ]{u::} ={0}(1—10)
(6)
单频:i式j,
«i羊灼j称⑷
iQj为单频。
(7)
重频:i式j.
[C]=:[M ]订K](1—26)
显然有:
{;}T[C]{ ;}=(一:」M:)M,rs(1—27)
定义模态阻尼:
Cr={;}T[C]{ ';} =2M J「r(1—28)
模态阻尼比:
尸1a住
r二―(r)(1—29)
2'r
原理上,可以通过测得的某两阶模态阻尼比,根据上式求出比例系数:和
'或测得多个模态阻尼比,用最小二乘法求解。
(4)与正交性有关的一些概念
模态矩阵
["]=【{i}{-2r{\}]
广义质量阵(模态质量阵)
diag [Mr]=[「]T[M ][门]
广义刚度阵(模态刚度阵)
diag[「]=[:•:『["[:•:」]
2
Kr二M「r
若模态已经按模态质量为1归一化,则
2diag [Mr]二[I ] diag [K「]二diag [」]
图2特征值隔离定理示意图
§
阻尼在振动系统中的作用:消耗能量
阻尼的数学描述:对实际结构,阻尼的精确数学描述不可能,常用简化
阻尼模型
1.粘性阻尼模型
粘性阻尼模型是最常用的阻尼模型,对自由振动,运动方程为:
[M ]{u}[C]{u}[K]{u} ={0}(1—25)
一般粘性阻尼矩阵[C]不能被固有模态对角化,为了分析简便,常采用一种 比例阻尼假设,由称为瑞利阻尼:
1 121
s;二■;(1jg;(jg;):--■■;(1jg;)(1—50)
2 8 2
模态坐标下,方程解:
1
■―g;t
q;(t)二A;e2sin(;t匕)(1—51)
显然结构阻尼不改变系统自由振动频率。
6.结构阻尼系统与粘性阻尼系统的一些比较
(1)*'dr=•;:1-:,*'gr八;
(2)g;=2;(数值上的等效关系)
【问题】:
(1)重频或密频时,正交性是否成立。
一般不正交,但线性无关,可以用正交化方法找到两个对应的正交向量。
(2)对于刚体模态是否有正交性?
对{ 'o}由于有[K]{ 'o}={0}故有[K]正交性。
(3)对于纯静态模态是否有正交性?
对{:}由于有[M]{::}={0}故有[M]正交性。
但{-0}不一定[M]正交,{ J不一定[K]正交。同样需要做变换,找到一组 新的向量,以满足对质量阵和刚度阵的正交性。
一般对于N个自由度的系统,增加了m个约束和增加了(m+1),则有(m)(m1)”■、 :■(m)■、:(m1)(m)■-:«(m1)■、、(m)
0-‘1i22N』(1—24)
特征值隔离定理的物理意义
(1)增加约束使特征值变大或保持不变,但不会减小。
(2)增加约束不会使任何一阶频率大过原系统的下一阶频率
第一章多自由度系统的固有振动特性
§
实际工程结构的振动往往用一个有限的多自由度振动系统来描述。多自由 度系统在数学上用一组常微分方程来描述,又称为集中参数系统。因此研究多 自由度系统振动特性是研究结构振动的基础和出发点。
§
1•振动方程
[M ]{u}[K]{u}={0}
例外:纯静态位移{u::}使
1\_T“_
模态坐标下,方程的解:
qr(t) =e~^*(6cosCOdrt+C2sinCOdrt),时dr=K)rj1—[r2(1—42)
5.结构阻尼系统
运动方程:
[M ]{ x}•j[H ]{ x} [K]{ x}={0}(1—43)
比例阻尼[H]=:•[M ]「[K]的假设下,方程仍然可以解耦:
Mrq;[( Krj(:MrK)]qr二0(1—44)
(4)解耦:利用模态矩阵作变换阵,以模态坐标作为新坐标系,对方程作线 性变换
{u(t)}=[:•:」]{q(t)}(1—15)
则有
Mrqr(t)-Kq(t)=0(r=1,2,…N)(1—16)
2.展开定理
(1)位移展开定理
N维空间中任一位移向量{u(t)}可以按该空间中的模态坐标展开
N
{u(t)}=[「]{q}二為qi(t){'i}
{】}T[C]{;}=°(「*)(1—35)
4.有阻尼系统的自由振动
N
利用固有模态正交性,利用模态坐标变换{X}=[①]{q} -7;qr可将系统自由
r三
振动方程解耦,得到模态坐标下的方程:
M「q;C「q;Kq=0(r=1,2,3N)(1—36)