FANUC常用参数含义
FANUCO系统常用参数
FANUCO系统常用参数1. P参数(Programmable parameter):这些参数用于设定机床的各种功能和操作模式。
例如,P1表示第一个参数,通常用于设定主轴速度、进给速度、工件坐标系等。
2. G代码参数(G Code Parameter):这些参数用于切换不同的G代码功能、坐标系和刀具半径补偿。
例如,G54-G59表示不同的工件坐标系,G40-G42表示刀具半径补偿。
3. M代码参数(M Code Parameter):这些参数用于设定机床的不同操作模式,例如,M03表示主轴正转,M04表示主轴反转,M05表示停止主轴。
4. T代码参数(T Code Parameter):这些参数用于选择和切换刀具。
例如,T01表示选择第一个刀具,T02表示选择第二个刀具。
5. S参数(Speed Parameter):用于设定主轴转速。
例如,S1000表示主轴转速为1000转/分钟。
6. F参数(Feedrate Parameter):用于设定进给速度。
例如,F200表示进给速度为200mm/分钟。
7. I、J、K参数(Incremental Coordinate Parameter):这些参数用于设定圆弧的半径、起点和终点。
例如,G02 X10 Y10 I5 J5表示从当前位置以半径为5的圆弧运动到X=10、Y=10的位置。
8. R参数(Retract Plane Parameter):用于设定刀具的安全位置。
例如,G01 Z-10 R2表示在Z=-10位置进行切削时,刀具在切削时以2mm的高度保持安全。
9. L参数(Loop Count Parameter):用于设定循环次数。
例如,L2表示循环2次。
10. H参数(Tool Length Offset Parameter):用于设定刀具长度的补偿。
例如,H1表示第一个刀具长度的补偿。
11. D参数(Dwell Parameter):用于设定停顿时间。
FANUC0系统常用参数

FANUC0系统常用参数1. 系统参数(Parameter)系统参数是FANUC0系列控制系统中最常用的参数之一,用于设置系统的基本运行参数。
这些参数控制了控制系统的运行方式、通信协议、安全设置等方面的内容。
2. 坐标系参数(Coordinate System Parameter)坐标系参数用于定义机床的坐标系,包括工件坐标系、机床坐标系、刀具坐标系等。
这些参数决定了机床在加工过程中的运动轨迹以及刀具在机床上的位置。
3. 运动参数(Motion Parameter)运动参数用于控制机床在加工过程中的运动方式,包括加速度、速度、插补方式等。
通过调节这些参数,可以控制机床的运动平滑度、加工效率等。
4. 加工参数(Cutting Parameter)加工参数用于定义机床的加工过程中所需的具体参数,例如进给速度、主轴转速、切削条件等。
通过调整这些参数,可以改变机床的加工效果,以满足实际加工需求。
5. 工具参数(Tool Parameter)工具参数用于设置机床上所使用的切削工具的相关参数,包括刀具长度、半径补偿、刀具的具体形状等。
这些参数用于控制机床在加工过程中刀具的位置和切削效果。
6. 轴参数(Axis Parameter)轴参数用于定义机床上各个轴的运动参数,包括轴的最大速度、最大加速度等。
通过调整这些参数,可以优化机床的运动性能,提高加工效率。
7. 程序参数(Program Parameter)程序参数用于定义机床上所使用的加工程序的相关参数,包括程序号、子程序号、刀具补偿等。
这些参数决定了机床在加工过程中所需的具体操作步骤。
通信参数用于设置机床与外部设备之间的通信方式和协议,包括通信速率、数据格式等。
通过调整这些参数,可以实现机床与其他设备的数据交换和控制。
8.1. 以太网参数(Ethernet Parameter)以太网参数用于定义机床与以太网之间的通信方式,包括IP地址、子网掩码、默认网关等。
FANUC机参数

FANUC机参数FANUC是一家专业生产工业机器人与数控设备的公司,其机器人广泛应用于制造业领域。
在FANUC机器人中,有很多重要的参数需要注意,这些参数将直接影响到机器的性能和效果。
下面将介绍一些重要的FANUC机器参数。
1.机器型号:FANUC机器人有各种不同的机型,每种机型适用于不同的应用场景。
公司根据自身的需要,可以选择适合其生产需求的机型。
2.负载能力:机器的负载能力是指机器能够承载的最大负荷。
这个参数对于选择适合的机器很重要,如果负荷超过了机器的负载能力,可能会导致机器性能下降或者机器系统的损坏。
3.工作范围:工作范围是指机器人在三维空间中可以操作的范围。
这个参数对于决定机器是否能够满足生产需求非常重要,如果工作范围不够大,可能无法完成一些任务。
4.速度:机器人的速度是指机器人在执行任务时的运动速度。
速度越快,机器人执行任务的效率也越高。
对于一些需要高效完成的生产线来说,快速的机器人速度是非常重要的。
5.精度:精度是指机器人在执行任务时的精确度,也就是机器人达到预定位置的准确度。
高精度的机器人在一些需要精确定位的任务中非常重要,例如装配线上的零件装配。
6.控制系统:FANUC机器人的控制系统是指机器人的核心控制单元,它负责机器的运动控制和任务编程。
控制系统的性能将直接影响到机器人的运行和编程效果。
7.编程方式:FANUC机器人支持多种编程方式,例如点动式编程、示教式编程和离线编程等。
不同的编程方式适用于不同的生产需求,公司可以根据自身的需要选择适合的编程方式。
8.安全功能:FANUC机器人的安全功能是指机器人的安全系统,负责保护机器人操作员的安全。
安全功能包括防护措施、紧急停止按钮和安全警报等。
9.通信接口:FANUC机器人的通信接口是指机器人与其他设备之间通信的方式。
通信接口的选择将影响到机器人与其他设备之间的数据交换和协作能力。
10.维护和保养:FANUC机器人的维护和保养是指机器人的日常维护和保养工作。
数控维修常用参数FANUC

数控维修常用参数FANUCFANUC数控系统是目前广泛应用于数控机床的一套完整的控制系统,其参数设置和调整对于机床运行的稳定性和使用寿命都有非常重要的影响。
本文将介绍常用的FANUC数控系统的参数设置和调整方法。
1. 脉冲当量(Pulse Equivalency,PE)脉冲当量是指伺服电机每转动一定角度所需的脉冲数量。
FANUC数控系统中的每个轴都需要设置脉冲当量。
在机床加工时,FANUC数控系统通过计算脉冲数量来控制电机的转动角度,从而实现精确的加工。
脉冲当量的设置过大或过小都会导致机床加工精度的下降。
通常情况下,可以通过调整脉冲当量来提高加工精度。
脉冲当量的设置方法是根据机床的传动结构和伺服系统的性能进行计算,并通过实际加工进行调整。
2. 速度环比例增益(P-Gain)速度环比例增益是指在伺服电机的速度控制环节中,通过调整输入速度和输出速度的比例关系来提高系统的动态性能。
过大的比例增益会导致系统震荡或不稳定,过小的比例增益会影响系统的动态响应能力。
在FANUC数控系统中,可以通过调整速度环比例增益来提高机床的加工效率和精度。
一般情况下,可以通过实际加工试验和性能评估来确定最佳的速度环比例增益值。
3. 加速度环比例增益(A-Gain)加速度环比例增益是指在伺服电机的加速度控制环节中,通过调整输入加速度和输出加速度的比例关系来提高系统的动态性能和加工效率。
在FANUC数控系统中,可以通过调整加速度环比例增益来提高机床的动态性能和加工效率。
一般情况下,可以通过实际加工试验和性能评估来确定最佳的加速度环比例增益值。
4. 位置环比例增益(P-Gain)位置环比例增益是指在伺服电机的位置控制环节中,通过调整输入位置和输出位置的比例关系来提高系统的定位精度和稳定性。
在FANUC数控系统中,可以通过调整位置环比例增益来提高机床的定位精度和稳定性。
一般情况下,可以通过实际加工试验和性能评估来确定最佳的位置环比例增益值。
FANUC常用系统参数说明
FANUC常用系统参数说明FANUC常用系统参数是一些特定的数值,在FANUC系统中用来配置和调整机床和控制系统的功能和性能。
这些参数可以被读取、修改和保存,以满足特定的加工需求和设备配置。
下面是一些常用的FANUC系统参数的说明:1.机床坐标系参数(G53,G54-G59):这些参数用于定义机床的坐标系。
每个坐标系可以代表不同的加工位置和工件夹持方式。
通过调整这些参数,可以在不同的工件加工过程中实现坐标系的切换和调整。
2.加工坐标系参数(G92):这个参数用于定义加工过程中的零点和坐标系位置。
通过调整这些参数,可以将工件的零点和坐标系原点设置为加工过程中的任意位置。
3.进给速率参数(F):这个参数用于定义进给速率。
通过调整这个参数,可以控制机床的进给速度,以便在不同的加工条件下达到最佳的加工效果。
4.进给倍率参数(G93,G94,G95):这些参数用于设置进给倍率。
通过调整这些参数,可以在加工过程中调整进给速率的倍数,以满足不同的加工要求。
5.插补方式参数(G01,G02,G03):这些参数用于定义插补方式。
通过调整这些参数,可以控制机床的插补方式,包括直线插补、圆弧插补等,以满足不同的加工需求。
6.主轴转速参数(S):这个参数用于定义主轴的转速。
通过调整这个参数,可以控制主轴的转速,以满足不同的加工要求。
7.刀具半径补偿参数(G40,G41,G42):这些参数用于刀具半径补偿。
通过调整这些参数,可以在加工过程中补偿刀具半径的影响,以确保加工轮廓的准确性和精度。
8.切削进给参数(G96,G97):这些参数用于定义切削进给方式。
通过调整这些参数,可以选择恒速切削进给(G96)或恒功率切削进给(G97),以适应不同的切削条件。
9.向前补偿参数(G43,G49):这些参数用于定义向前补偿。
通过调整这些参数,可以在加工过程中补偿刀具的尺寸和位置变化,以确保加工结果的准确性和精度。
10.循环启动参数(G80):这个参数用于循环启动。
FANUC常用系统参数说明

FANUC常用系统参数说明1. OVC (Override Control):这个参数用于控制机器人运动速度的缩放比例。
该参数的值范围为0到200,其中0表示机器人停止,100表示机器人以原始程序定义的速度运动,200表示机器人以两倍于原始程序定义的速度运动。
2. PS1 (Teach Pendant Safety Override):该参数用于控制示教器(Teach Pendant)上的安全逻辑。
它决定了是否允许通过示教器来调整机器人的速度和动作。
它的值范围为0到255,其中0表示不允许示教器调整速度和动作,255表示允许示教器完全控制机器人。
3. SV (Servo Gain):该参数用于调整伺服驱动器的增益。
伺服驱动器负责控制机器人的关节运动,而SV参数的值决定了伺服驱动器对应速度指令的响应速度。
较高的SV值可以提供更快的响应和更高的机器人速度,但可能会导致控制系统不稳定。
4. VS (Velocity Scale):该参数用于控制机器人的运动速度。
它的值范围为0到100,其中0表示机器人停止,100表示机器人以原始程序定义的速度运动。
通过调整VS参数可以在不改变原始程序的情况下控制机器人的速度。
5. PR (Position Register):该参数用于存储和管理机器人的位置信息。
每个位置寄存器可以存储机器人的关节角度或笛卡尔坐标。
通过使用PR参数,可以方便地在程序中使用和管理机器人的位置信息。
6. CN (Control Mode):该参数用于控制机器人的动作模式。
它的值决定了机器人是在手动模式下操作还是在自动模式下运行程序。
手动模式下,操作员可以通过示教器来控制机器人的运动;而在自动模式下,机器人会根据预定义的程序自动执行。
7. ITP (Interlocking Program):该参数用于设置并行操作的机器人之间的同步。
当多个机器人同时进行复杂的协作任务时,ITP参数可以确保它们之间的运动同步。
FANUC常用参数说明
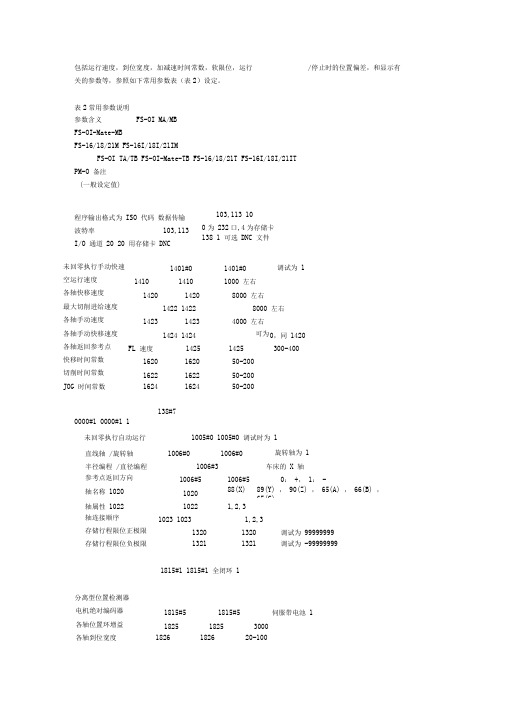
包括运行速度,到位宽度,加减速时间常数,软限位,运行 关的参数等,参照如下常用参数表(表2)设定。
表2常用参数说明 参数含义FS-OI MA/MBFS-OI-Mate-MBFS-16/18/21M FS-16I/18I/21IMFS-OI TA/TB FS-OI-Mate-TB FS-16/18/21T FS-16I/18I/21ITPM-O 备注(一般设定值)程序输出格式为 ISO 代码 数据传输波特率103,113I/O 通道 20 20 用存储卡 DNC138#70000#1 0000#1 1103,113 10 0为 232口,4为存储卡 138 1 可选 DNC 文件直线轴 /旋转轴 1006#01006#0旋转轴为 1 半径编程 /直径编程 1006#3 车床的 X 轴参考点返回方向 1006#5 1006#5 0: +, 1: -轴名称 1020 1020 88(X) , 89(Y) , 90(Z) , 65(A) , 66(B) , 67(C) 轴属性 1022 10221,2,3轴连接顺序1023 10231,2,3 存储行程限位正极限 1320 1320 调试为 99999999 存储行程限位负极限13211321调试为 -99999999未回零执行自动运行 1005#0 1005#0 调试时为 1未回零执行手动快速 1401#01401#0调试为 1空运行速度 1410 1410 1000 左右各轴快移速度14201420 8000 左右最大切削进给速度1422 1422 8000 左右各轴手动速度 14231423 4000 左右各轴手动快移速度1424 1424可为 0,同 1420各轴返回参考点 FL 速度1425 1425300-400快移时间常数 1620 1620 50-200切削时间常数1622 1622 50-200JOG 时间常数1624162450-2001815#1 1815#1 全闭环 1/停止时的位置偏差,和显示有电机绝对编码器 1815#5 1815#5 伺服带电池 1各轴位置环增益 1825 1825 3000各轴到位宽度 1826182620-100分离型位置检测器参数含义 FS-OI MA/MB FS-OI-Mate-MB FS-16/18/21M FS-16I/18I/21IMFS-OI TA/TB FS-OI-Mate-TB FS-16/18/21T FS-16I/18I/21IT PM-O 备注 (设定值)中文显示 3102#3 3102#31实际进给速度显示 3105#0 3105#0 1主轴速度和 T 代码显示 3105#2 3105#2 1主轴倍率显示 3106#53106#5 1实际手动速度显示 指令 3108#7 3108#7 1伺服调整画面显示 3111#0 3111#0 1 主轴监控画面显示 3111#1 3111#1 1 操作监控画面显示 3111#5 3111#5 1伺服波形画面显示 3112#03112#0需要时 1,最后要为 0各轴方向互锁信号无效 3003#33003#2*ITX-*IT4(G132,G134)减速信号极性 3003#53003#5行程( 常闭)开关 0接近(常开)开关 1超程信号无效 3004#5 3004#5 出现 506, 507 报警时设定 1显示器类型3100#73100#7 0 单色, 1 彩色各轴互锁信号无效 3003#2 3003#2*ITX-*IT4(G130)各轴移动位置偏差极限 各轴停止位置偏差极限 1828 1828 调试 100001829 1829 200各轴反向间隙1851 1851 测量 P-I 控制方式 单脉冲消除功能 2003#32003#42003#3 12003#4 停止时微小震动设 1虚拟串行反馈功能 2009#0 2009#0如果不带电机 1电机代码 2020 2020 查表 负载惯量比 2021 2021 200 左右 电机旋转方向 2022 2022 111 或-111速度反馈脉冲数2023 2023 8192位置反馈脉冲数 2024 2024柔性进给传动比 ( 分子 )N2084,2085互锁信号无效 3003#0 3003#0半 12500 ,全(电机一转时走的微米数)2084 转动比,计算 *IT (G8.0)指令数值单位3401#0 3401#0 0:微米,1:毫米各轴参考点螺补号3620 3620 实测各轴正极限螺补号3621 3621各轴负极限螺补号3622 3622螺补数据放大倍数3623 3623螺补间隔3624 3624是否使用串行主轴3701#1 3701#1 0 带,1不带检测主轴速度到达信号3708#0 3708#0 1 检测主轴电机最高钳制速度3736 限制值/最大值*4095主轴各档最高转速3741/2/3 3741/2/3/4 电机最大值/减速比是否使用位置编码器4002#1 4002#1 使用1主轴电机参数初始化位4019#7 4019#7主轴电机代码4133 4133CNC 控制轴数8130(OI) 8130(OI)CNC 控制轴数1010 1010 8130-PMC 轴数手轮是否有效8131#0(OI) 8131#0(OI) 设0 为步进方式串行主轴有效3701#1 3701#1直径编程1006#3 同时CMR=1号 3 1/3000 3 2/3000 3 3/3000 3 6/2000 a c3/2000电机代码35 36 33 34 7 8电机号 a c12/2000 a c22/1500 a 3/3000 a 6/2000 a 6/30002000电机代码9 10 15 16 17 18电机号 a 12/3000 a 22/1500 a 22/2000 a 22/3000 a 30/1200/2000电机代码19 27 20 21 28 22电机号 a 30/3000 a 40/FAN a 40/2000 a 65 a 100/2000电机代码23 29 30 39 40 41型a c6/200型a 12/型a 30型a 150号 a 3/8000 a 6/8000 a8/6000 a 12/6000 a 15/6000 00电机代码105 106 107 108 109 110电机型号 a p8/6000ap12/6000 a p15 a p18 a p22 电机代码112 113 114 115 116 117型a 18/60 a p30表3 a/ B伺服电机代码表(OLD) 电机表4 a主轴电机代码表(OLD) 电机表5 i系列伺服电机代码表电机型号 3 4/4000is 3 8/3000is 3 12/3000is 3 22/2000is a c4/3000i电机代码156(256) 158(258) 174(274) 176(276) 171(271)电机型号 a c8/2000i a c12/2000i a c22/2000i a c30/1500i a 2/5000i电机代码176(276) 191(291) 196(296) 201(301) 155(255)电机型号 a 4/3000i a 8/3000i a 12/3000i a 22/3000i a 30/3000i电机代码173(273) 177(277) 193(293) 197(297) 203(303)电机型号 a 40/3000i a 4/5000is a 8/4000is a 12/4000is a 22/4000is电机代码207(307) 165(265) 185(285) 188(288) 215(315)电机型号 a 30/4000is a 40/4000is a 50/3000is a 50/3000isFAN a 100/2500is电机代码218(318) 222(322) 224(324) 225(325) 235(325)表6 i系列主轴电机代码表电号 3 3/10000i机型ac15/6000 3 6/10000i 3 8/8000i 3 12/7000ii电机代码332 333 334 335 246电机型号ac1/6000i ac2/6000i ac3/6000i ac6/6000i ac8/6000i a c12/6000i电机代码240 241 242 243 244 245电机型号 a 0.5/10000i a 1/10000i a 1.5/10000i a 2/10000i a 3/10000ia 6/10000i电机代码301 302 304306 308 310电机型号 a 8/8000i a 12/7000i a 15/7000i a 18/7000i a 22/7000i a 30/6000i电机代码312 314 316 318 320 322电机型号 a 40/6000i a 50/4500i a 1.5/15000i a 2/15000i a 3/12000ia 6/12000i电机代码323 324 305307309 401电机型号 a 8/10000i a 12/10000i a 15/10000i a 18/10000i a 22/10000i电机代码402 403 404 405 406电机型号a 12/6000ip a 12/8000ip a15/6000ip a 15/8000ip a 18/6000ipa 18/8000ip电机代码407 4020 (8000)4023 (94) 408 4020 (8000)4023 (94) 409 4020 (8000)4023 (94)电机型号 a 22/6000ip a 22/8000ip a30/600ip a 40/6000ip a 50/6000ipa 60/4500ip电机代码410 4020 (8000)4023 (94) 411 412 413 414。
fanuc常用参数
fanuc常用参数Fanuc是世界领先的工业机器人和自动化解决方案供应商之一。
它的机器人和控制系统在许多行业中被广泛应用,包括汽车制造、航空航天、电子制造、金属加工等。
Fanuc机器人的参数设置对于机器人的正常运行和性能优化非常重要。
下面是几个常用的Fanuc机器人参数以及它们的参考内容。
1. RSPD - 机器人运行速度RSPD参数定义了机器人的运行速度,通常以百分比表示。
可以根据实际的应用需求来设置该参数。
例如,对于需要快速操作的任务,可以将RSPD设置为较高的值,以提高机器人的运行速度。
但是需要注意的是,过高的速度可能会导致机器人在操作过程中产生过大的惯性力,导致精度降低或者机器人移动不稳定。
因此,在设置RSPD时需要找到速度和精度之间的平衡点。
2. JVEL - 关节速度JVEL参数定义了机器人每个关节的最大速度,通常以度/秒为单位。
可以根据机器人结构和任务要求来设置该参数。
例如,如果机器人某些关节的负载较大或者受到了限制,可以降低JVEL以减小关节的运动速度。
另外,较低的JVEL值也可以用来提高机器人的运动平稳性和控制精度。
3. ACC - 加速度ACC参数定义了机器人的加速度,通常以度/秒^2为单位。
加速度决定了机器人在开始和结束运动时的速度变化率。
在设置ACC时,需要根据机器人和任务的特点来选择。
较小的加速度可以提高机器人的稳定性和精度,但是可能会导致运动速度过慢。
相反,较大的加速度可以加快机器人的运动速度,但是可能会对机器人结构和控制系统造成较大的负载。
4. RCTR - 机器人模式RACT参数定义了机器人的工作模式,常见的有Auto模式和Manual模式。
在Auto模式下,机器人将按照预先设定的程序执行任务。
在Manual模式下,机器人可以手动操作,例如通过操纵杆或者外部控制台进行控制。
根据具体的任务需求,可以调整机器人的工作模式。
5. ZONE - 动作平滑度ZONE参数定义了机器人在运动过程中的平滑度。
FANUC常用参数说明

包括运行速度,到位宽度,加减速时间常数,软限位,运行/停止时的位置偏差,和显示有关的参数等,参照如下常用参数表(表2)设定。
表2常用参数说明参数含义 FS-OI MA/MBFS-OI-Mate-MBFS-16/18/21MFS-16I/18I/21IMFS-OI TA/TBFS-OI-Mate-TBFS-16/18/21TFS-16I/18I/21ITPM-O备注(一般设定值)程序输出格式为ISO代码 0000#1 0000#1 1数据传输波特率 103,113 103,113 10I/O通道 20 20 0为232口,4为存储卡用存储卡DNC 138#7 138 1可选DNC文件未回零执行自动运行 1005#0 1005#0 调试时为1直线轴/旋转轴 1006#0 1006#0 旋转轴为1半径编程/直径编程 1006#3 车床的X轴参考点返回方向 1006#5 1006#5 0:+,1:-轴名称 1020 1020 88(X),89(Y),90(Z),65(A),66(B),67(C)轴属性 1022 1022 1,2,3轴连接顺序 1023 1023 1,2,3存储行程限位正极限 1320 1320 调试为99999999存储行程限位负极限 1321 1321 调试为-99999999未回零执行手动快速 1401#0 1401#0 调试为1空运行速度 1410 1410 1000左右各轴快移速度 1420 1420 8000左右最大切削进给速度 1422 1422 8000左右各轴手动速度 1423 1423 4000左右各轴手动快移速度 1424 1424 可为0,同1420各轴返回参考点FL速度 1425 1425 300-400快移时间常数 1620 1620 50-200切削时间常数 1622 1622 50-200JOG时间常数 1624 1624 50-200分离型位置检测器 1815#1 1815#1 全闭环1电机绝对编码器 1815#5 1815#5 伺服带电池1各轴位置环增益 1825 1825 3000各轴到位宽度 1826 1826 20-100各轴移动位置偏差极限 1828 1828 调试10000各轴停止位置偏差极限 1829 1829 200各轴反向间隙 1851 1851 测量P-I控制方式 2003#3 2003#3 1单脉冲消除功能 2003#4 2003#4 停止时微小震动设1虚拟串行反馈功能 2009#0 2009#0 如果不带电机1电机代码 2020 2020 查表负载惯量比 2021 2021 200左右电机旋转方向 2022 2022 111或-111速度反馈脉冲数 2023 2023 8192参数含义 FS-OI MA/MBFS-OI-Mate-MBFS-16/18/21MFS-16I/18I/21IMFS-OI TA/TBFS-OI-Mate-TBFS-16/18/21TFS-16I/18I/21ITPM-O备注(设定值)位置反馈脉冲数 2024 2024 半12500,全(电机一转时走的微米数)柔性进给传动比(分子)N 2084,2085 2084 转动比,计算互锁信号无效 3003#0 3003#0 *IT(G8.0)各轴互锁信号无效 3003#2 3003#2 *ITX-*IT4(G130)各轴方向互锁信号无效 3003#3 3003#2 *ITX-*IT4(G132,G134)减速信号极性 3003#5 3003#5 行程(常闭)开关0接近(常开)开关1超程信号无效 3004#5 3004#5 出现506,507报警时设定1显示器类型 3100#7 3100#7 0单色,1彩色中文显示 3102#3 3102#3 1实际进给速度显示 3105#0 3105#0 1主轴速度和T代码显示 3105#2 3105#2 1主轴倍率显示 3106#5 3106#5 1实际手动速度显示指令 3108#7 3108#7 1伺服调整画面显示 3111#0 3111#0 1主轴监控画面显示 3111#1 3111#1 1操作监控画面显示 3111#5 3111#5 1伺服波形画面显示 3112#0 3112#0 需要时1,最后要为0指令数值单位 3401#0 3401#0 0:微米,1:毫米各轴参考点螺补号 3620 3620 实测各轴正极限螺补号 3621 3621各轴负极限螺补号 3622 3622螺补数据放大倍数 3623 3623螺补间隔 3624 3624是否使用串行主轴 3701#1 3701#1 0带,1不带检测主轴速度到达信号 3708#0 3708#0 1 检测主轴电机最高钳制速度 3736 限制值/最大值*4095主轴各档最高转速 3741/2/3 3741/2/3/4 电机最大值/减速比是否使用位置编码器 4002#1 4002#1 使用1主轴电机参数初始化位 4019#7 4019#7主轴电机代码 4133 4133CNC控制轴数 8130(OI) 8130(OI)CNC控制轴数 1010 1010 8130-PMC轴数手轮是否有效 8131#0(OI) 8131#0(OI) 设0为步进方式串行主轴有效 3701#1 3701#1直径编程 1006#3 同时CMR=1表3α/β伺服电机代码表(OLD)电机型号β1/3000 β2/3000 β3/3000 β6/2000 αc3/2000 αc6/200 0电机代码 35 36 33 34 7 8电机型号αc12/2000 αc22/1500 α3/3000 α6/2000 α6/3000 α12/ 2000电机代码 9 10 15 16 17 18电机型号α12/3000 α22/1500 α22/2000 α22/3000 α30/1200 α30 /2000电机代码 19 27 20 21 28 22电机型号α30/3000 α40/FAN α40/2000 α65 α100/2000 α150电机代码 23 29 30 39 40 41表4α主轴电机代码表(OLD)电机型号α3/8000 α6/8000 α8/6000 α12/6000 α15/6000 α18/60 00电机代码 105 106 107 108 109 110电机型号αp8/6000 αp12/6000 αp15 αp18 αp22 αp30电机代码 112 113 114 115 116 117表5i系列伺服电机代码表电机型号β4/4000is β8/3000is β12/3000is β22/2000is αc4/3000i电机代码 156(256) 158(258) 174(274) 176(276) 171(271)电机型号αc8/2000i αc12/2000i αc22/2000i αc30/1500i α2/5000i电机代码 176(276) 191(291) 196(296) 201(301) 155(255)电机型号α4/3000i α8/3000i α12/3000i α22/3000i α30/3000i电机代码 173(273) 177(277) 193(293) 197(297) 203(303)电机型号α40/3000i α4/5000is α8/4000is α12/4000is α22/4000is电机代码 207(307) 165(265) 185(285) 188(288) 215(315)电机型号α30/4000is α40/4000is α50/3000is α50/3000isFAN α100/2500is电机代码 218(318) 222(322) 224(324) 225(325) 235(325)表6i系列主轴电机代码表电机型号β3/10000i β6/10000i β8/8000i β12/7000i ac15/6000 i电机代码 332 333 334 335 246电机型号 ac1/6000i ac2/6000i ac3/6000i ac6/6000i ac8/6000i a c12/6000i电机代码 240 241 242 243 244 245电机型号α0.5/10000i α1/10000i α1.5/10000i α2/10000i α3/10000i α6/10000i电机代码 301 302 304 306 308 310电机型号α8/8000i α12/7000i α15/7000i α18/7000i α22/7000i α30/6000i电机代码 312 314 316 318 320 322电机型号α40/6000i α50/4500i α1.5/15000i α2/15000i α3/12000iα6/12000i电机代码 323 324 305 307 309 401电机型号α8/10000i α12/10000i α15/10000i α18/10000i α22/10000i电机代码 402 403 404 405 406电机型号α12/6000ip α12/8000ipα15/6000ip α15/8000ip α18/6000ip α18/8000ip电机代码 407 4020 (8000)4023 (94) 408 4020 (8000)4023 (94) 409 4020 (8000)4023 (94)电机型号α22/6000ip α22/8000ip α30/6000ip α40/6000ip α50/6000ip α60/4500ip电机代码 410 4020 (8000)4023 (94) 411 412 413 414。
fanuc常用参数
fanuc常用参数FANUC是全球最大的机器人制造商之一,其广泛的工业机器人和CNC系统在全球各领域被广泛应用。
在使用FANUC的机器人和CNC系统时,常涉及到一些重要的参数,这些参数对于机器人的正常运行以及生产过程中的安全和效率都发挥着至关重要的作用。
以下是FANUC机器人常用的参数及其相关参考内容:1. S型加减速度参数:S型加减速度参数对机器人的运动控制非常重要。
在使用机器人时,S型加速度参数的值决定了机器人运动的快慢和平滑程度。
加速度参数过高或过低都会影响机器人的正常运行。
若加速度参数过高,机器人可能会失去控制,因而应该根据实际情况设定合适的加速度参数。
2. 位置误差参数:机器人在进行运动时,如果位置控制不准确,会导致产品生产质量下降甚至出现不良品。
FANUC机器人使用位置误差参数来确定机器人位移量与位置设定值的差异。
通过调整位置误差参数,可以保证机器人的位置控制精度,提高产品的生产质量。
3. 坐标系参数:机器人的动作控制是基于坐标系来进行的。
坐标系参数确定了机器人坐标系相对于世界坐标系的位置和方向。
我们可以通过修改坐标系参数来实现机器人的坐标变换,实现机器人的多姿态操作。
4. 工具坐标系参数:工具坐标系是机器人的工具、末端执行器和传感器的坐标系。
工具坐标系参数与末端执行器的姿态和位置有关,并且可以影响到机器人的定位和运动控制。
当机器人进行复杂的运动时,我们可以通过设置工具坐标系参数来提高机器人运动的精度。
5. 坐标系旋转参数:在一些特殊的情况下,我们可能需要旋转整个机器人坐标系,以适应不同的生产需求。
坐标系旋转参数允许我们通过旋转机器人坐标系来调整其朝向。
通过修改坐标系旋转参数,我们可以改变机器人的运行方向、朝向和位置。
除了上述常见参数,FANUC机器人还有许多其他参数。
这些参数通常会随着使用的机器人模型和应用场景而有所不同,因此在使用机器人时,需要根据实际情况进行设定和调整。
不过,无论使用哪种参数,我们都应该注意安全性和操作精确性,以保证机器人能够正常运行并保持高效的生产效率。
FANUC常用参数
FANUC常用参数1.报警处理参数(ALM)这些参数用于设置系统报警的处理方式,例如报警终止的条件、报警信息的显示等。
2.坐标系参数(G54~G59)这些参数用于设置工件坐标系的原点和轴向移动的距离。
3.速度参数(F、S、G96~G97)这些参数用于设置切削进给速度、切削用途的材料速度等。
4.转速参数(M3、M4、M5)这些参数用于设置主轴的转速和方向。
5.工具偏移参数(G43、G44、G48)这些参数用于设置和调整工具补偿的位置。
6.急停参数(M0、M1)这些参数用于设置急停的条件和执行急停操作。
7.程序调用参数(M98、M99)这些参数用于调用和执行子程序。
8.伺服参数(SV、SET)这些参数用于设置伺服轴的速度和位置。
9.插补误差参数(G96、G97、G98、G99)这些参数用于设置插补误差补偿的方式和值。
10.自动换刀参数(T、M6)这些参数用于自动换刀操作,设置刀具编号和刀具长度补正值。
11.平台控制参数(G160~G169)这些参数用于配置和控制机床上的附加设备,例如自动上下料机等。
12.快速移动参数(G00)这些参数用于设置快速移动的速度和方式。
13.进给速度参数(G94、G95)这些参数用于设置进给速度单位和进给速度值。
14.反向间隙参数(G41、G42)这些参数用于设置反向间隙的值和位置。
15.加工参数(G01、G02、G03)这些参数用于设置不同的加工方式,例如直线插补、圆弧插补等。
以上是一些常用的FANUC参数示例,不同的机床和加工过程可能会有所差异。
在操作FANUC数控系统时,正确设置和调整这些参数是非常重要的,可以确保机床正常运行,并且获得高质量的加工结果。
FANUC伺服电机中文参数说明
FANUC伺服电机中文参数说明1.功率参数:FANUC伺服电机的功率参数通常以千瓦(kW)为单位表示。
这是指电机能够输出的最大功率,也是电机的核心参数之一、功率越高,电机的输出能力越强。
2.额定转速:FANUC伺服电机的额定转速是指电机在额定电压和电流下能够运转的最高转速。
额定转速与电机的构造和设计密切相关,对于不同型号的电机可能会有所不同。
3.额定电压:FANUC伺服电机的额定电压是指电机运行所需的电压值。
通常以伏特(V)为单位表示。
额定电压决定了电机的运行参数和性能,不同的应用需求可能需要不同的额定电压。
4.额定电流:FANUC伺服电机的额定电流是指电机在额定电压下所需的电流值。
通常以安培(A)为单位表示。
额定电流决定了电机的负载能力和驱动能力,在选择适合的驱动器时需要考虑电机的额定电流。
5.额定转矩:FANUC伺服电机的额定转矩是指电机在额定电流下所能提供的最大转矩。
通常以牛顿·米(Nm)为单位表示。
额定转矩是评估电机驱动能力和动力性能的关键参数。
6. 包络尺寸:FANUC伺服电机的包络尺寸是指电机外形的尺寸,一般以毫米(mm)为单位表示。
根据应用需求,需要选择适合的电机尺寸以适应空间限制。
7.加速度:FANUC伺服电机的加速度是指电机在单位时间内能够改变其转矩和转速的能力。
通常以每秒平方(m/s^2)为单位表示。
加速度决定了电机的响应速度和动态性能。
8. 轴径:FANUC伺服电机的轴径是指电机输出轴的直径。
通常以毫米(mm)为单位表示。
轴径决定了电机的安装方式和接口形式,需要根据具体应用需求选择合适的电机轴径。
9. 支持通讯协议:FANUC伺服电机通常支持多种通讯协议,如FANUC伺服协议、EtherNet/IP、Modbus等。
这些通讯协议能够使电机与上位设备进行联动控制和数据传输。
10.配件附件:在使用FANUC伺服电机时,还可以选择各种配件附件,如编码器、刹车器、温度传感器等,以实现更精确的运动控制和故障保护。
FANUC_系统参数及中文解释

FANUC_系统参数及中文解释1.O9001:设置中断/自动停止模式。
0表示中断模式,即当发生错误或警报时,程序会暂停执行;1表示自动停止模式,即当发生错误或警报时,程序会自动停止执行。
2.O1320:切削液类型选择。
0表示无切削液,1表示浸润冷却切削液,2表示压力供液切削液。
3.O1902:速度控制方式。
0表示使用加减速控制方式,即通过指定不同的加减速度来控制工件运动的速度;1表示使用频率控制方式,即通过调整主轴电机的转速来控制工件运动的速度。
4.O2600:定位误差补偿类型。
0表示不使用定位误差补偿;1表示使用位置误差补偿,可以通过设定补偿值来修正工件的位置误差;2表示使用半径误差补偿,可以通过设定补偿值来修正工件的半径误差。
5.O3301:进给轴选择。
0表示进给一轴,1表示进给二轴,2表示同时进给一、二轴。
6.O4000:插补时基准位置选择。
0表示使用机械参考点作为插补时的基准位置;1表示使用工件的其中一特定位置作为插补时的基准位置。
7.O5431:坐标系统选择。
0表示使用绝对坐标系统,即以机床坐标系为参照,以机械参考点为原点;1表示使用相对坐标系统,即以工件的起始点为原点。
8.O7000:快速进给速度选择。
0表示使用低速快速进给速度,1表示使用中速快速进给速度,2表示使用高速快速进给速度。
9.O8001:刀具半径补偿选择。
0表示使用刀具半径补偿G41/G42指令,1表示使用半径补偿函数,可以通过设定补偿值来修正刀具的半径误差。
10.O9002:主轴控制方式。
0表示使用转速控制,主轴电机的转速由程序中的指令确定;1表示使用进给控制,主轴电机的转速根据工件的进给速度自动调整。
这些参数只是FANUC系统参数的一部分,不同型号的数控装置可能有差异。
在使用FANUC数控装置时,用户可以根据具体需求对这些参数进行设置,以满足特定的加工要求。
同时,FANUC数控装置还提供了一系列其他的参数,如进给倍率、插补方式、原点复归方式等,这些参数的设置对于加工的精度、速度、性能等方面都有一定的影响。
fanuc常用参数
fanuc常用参数Fanuc是一种集成电路,常用于数控机床的控制系统中,其参数的设置对于机床的运转和加工结果具有至关重要的作用。
下面将介绍Fanuc开发的一些常用参数及其相关的参考内容。
1. R参数R参数是Fanuc控制系统用来调整切削进给速度的一个参数。
由于每种材料的切削性质不同,因此需要根据不同的加工材料进行调整。
参考内容:根据不同的材料,可以设置不同的R数值。
一般来说,对于黄铜、铝合金等比较软的材料,需要设置较大的R 值,以保证刀具不会因为进给速度过快而被磨损。
而对于硬质合金等材料,则需要设置较小的R值,以保证刀具进给速度的稳定性。
2. F参数F参数用于控制主轴的进给速度。
在加工过程中,需要根据不同的加工要求和切削条件进行设置。
参考内容:根据不同的加工要求,可以在G代码中设置不同的F值。
一般来说,加工大型工件时需要较低的进给速度,而加工小型工件时则可以适当提高进给速度。
在切削条件较差的情况下,也需要适当降低进给速度以保障切削质量。
3. G参数G参数是Fanuc控制系统所使用的语言。
在进行加工操作时,需要编写G代码,用来控制机床的各项操作,包括切削进给、主轴转速等。
参考内容:在编写G代码时,需要根据具体的加工步骤和要求来设置相应的G参数。
比如,在进给过程中,需要设置G01,表示线性进给。
在顺时针或逆时针旋转时,需要分别使用G02和G03命令。
4. P参数P参数通常用来进行辅助功能的设置,比如刀具长度补偿、孔加工、线割等。
参考内容:在使用P参数时,需要根据不同的功能进行设置。
比如刀具长度补偿,可以使用P值来控制刀具头到工件表面的距离,以保证切削的准确性。
5. T参数T参数通常用来设置刀具的切削参数。
在进行不同的切削操作时,需要使用不同的刀具,并设置相应的刀具参数。
参考内容:在进行刀具的切削参数设置时,需要考虑到切削条件、材料、刀具类型等因素。
不同的切削操作需要使用不同的刀具,并设定相应的刀具编号。
FANUC维修中常用参数
FANUC维修中常用参数FANUC工业机器人是世界上广泛使用的一种工业机器人,其应用领域包括汽车制造、电子制造、食品加工等众多行业。
在维修过程中,掌握常用的参数对于诊断和排除故障非常重要。
下面将介绍一些FANUC维修中常用的参数。
1.电机参数:电机参数是控制机器人运动的关键,包括电机型号、额定功率、额定转速、额定电流等。
在维修过程中,需要检查电机参数是否与设备要求一致,如果不一致,可能是电机被更换或调整了参数。
2.编码器参数:编码器用于检测电机的转动位置和速度,包括编码器型号、分辨率、信号类型等。
如果电机的位置或速度检测不准确,可能是编码器参数设置错误或编码器本身故障。
3.轴参数:FANUC机器人包含多个轴,每个轴都有相应的参数,如轴号、轴类型、轴速度、轴极限位置等。
在维修过程中,需要检查轴参数是否正确设置,特别是轴速度和轴极限位置参数。
4.机器人参数:机器人参数包括机器人型号、机器人大小(轴数)、机器人尺寸、机器人重量等。
这些参数通常与机器人机械结构相关,维修时需要检查参数是否与实际一致,特别是更换了关键部件或进行了结构调整的情况下。
5.输入/输出参数:FANUC机器人通常包含多个输入/输出(I/O)接口,用于与外部设备进行通信。
输入参数包括输入口类型、输入口状态、输入口名称等;输出参数包括输出口类型、输出口状态、输出口名称等。
在维修中,需要检查I/O参数是否正确设置,特别是与外部设备连接有关的参数。
6.伺服参数:伺服参数用于调整机器人的运动控制性能,包括位置环、速度环、电流环等。
在维修过程中,可能需要调整伺服参数以改善机器人的运动性能或解决运动不稳定的问题。
7.报警参数:FANUC机器人可以通过报警代码来指示故障原因,报警参数包括报警代码、报警消息、报警级别等。
在维修过程中,需要检查报警参数,根据报警代码和报警消息来诊断故障原因。
8.通信参数:FANUC机器人可以与上位机或其他设备进行通信,通信参数包括通信接口、通信协议、通信速率等。
fanuc常用参数

fanuc常用参数FANUC是一家全球领先的工业机器人制造商,其机器人系统广泛应用于自动化生产线和工厂中。
在FANUC机器人系统中,有许多参数可供用户根据具体需求进行调整和设置。
下面将介绍一些FANUC常用参数及其相关参考内容。
1. P-CHAN(通道号):P-CHAN参数用于指定当前编程所使用的通道号。
FANUC机器人系统中,通常有4个编程通道可供用户选择。
通道号从1到4,分别对应于不同的编程作业。
用户可以使用P-CHAN参数来指定当前使用的通道号。
2. P-RANGE(坐标系统编号):P-RANGE参数用于指定当前编程所使用的坐标系编号。
FANUC机器人系统中,可以定义多个坐标系,并根据需求进行选择和切换。
用户可以使用P-RANGE参数来设置当前的坐标系编号。
3. P-LIMIT(速度限制):P-LIMIT参数用于控制机器人的速度限制。
根据具体应用的需求,用户可以设置机器人的最大运动速度和加速度。
P-LIMIT参数包括机器人各轴的速度限制值,可以进行调节来适应不同的工作条件和要求。
4. P-ZONE(工具坐标系使用范围):P-ZONE参数用于设置机器人在工具坐标系中可以容忍的误差范围。
该参数主要用于控制机器人在结束一个动作之后,是否需要等待工具坐标系稳定。
用户可以根据具体情况来设置P-ZONE参数的值,以达到理想的操作效果。
5. P-SLACK(松弛区间):P-SLACK参数用于控制机器人在执行动作时的松弛区间。
松弛区间可以理解为机器人执行动作时容忍的误差范围。
P-SLACK参数可以指定机器人在进行插补运动时的松弛区间的大小。
用户可以根据具体工作任务和机器人的精度要求来设置该参数。
6. P-ACC(加减速时间):P-ACC参数用于控制机器人的加减速时间。
在机器人执行动作时,加减速时间是一个很重要的参数。
它决定了机器人开始和结束动作时的速度变化率。
用户可以根据具体需求来调整P-ACC参数的值,以获得最佳的动作效果和运动轨迹。
FANUC_系统全参数大全
FANUC_系统全参数大全1.G代码参数:G代码是FANUC系统中的一种控制指令,用于控制机床或机器人执行特定的动作。
例如,G00指令可以用于快速定位,G01指令用于直线插补,G02和G03指令用于圆弧插补。
不同的G代码参数可以自定义,以满足不同的加工需求。
2.M代码参数:M代码是FANUC系统中的另一种控制指令,用于执行机床或机器人上的特定功能。
例如,M03指令用于启动主轴正转,M05指令用于停止主轴,M08指令用于启动冷却液,M09指令用于停止冷却液。
不同的M代码参数可以自定义,以满足不同的功能需求。
3.轴参数:轴参数用于配置机床或机器人上的不同轴的特性。
例如,可以设置每个轴的速度限制、加减速度、位置补偿和误差补偿等。
这些参数的设置可以影响加工精度和运动的平滑性。
4.运动参数:运动参数用于配置机床或机器人的运动控制。
例如,可以设置机床或机器人的最大加速度、减速度和最大速度。
这些参数的设置可以影响机床或机器人的动态响应和平稳性。
5.插补参数:插补参数用于配置机床或机器人的插补功能。
例如,可以设置插补的坐标系、插补的方式(直线、圆弧、螺旋等)和插补的精度。
这些参数的设置可以影响机床或机器人的加工精度和轨迹控制。
6.工具参数:工具参数用于配置机床或机器人上的工具刀具的特性。
例如,可以设置工具的长度、半径、刀具补偿、刀具补偿半径和刀具卸扣位置等。
这些参数的设置可以影响加工的准确性和工具的使用。
7.变量参数:变量参数用于配置机床或机器人上的不同变量的值。
例如,可以设置变量的初始值、计算公式和使用范围。
这些参数的设置可以影响机床或机器人上不同操作的计算和控制逻辑。
8.系统参数:系统参数用于配置FANUC控制系统中的各种功能和特性。
例如,可以设置系统的程序存储空间、系统通信接口和报警功能等。
这些参数的设置可以影响整个控制系统的性能和稳定性。
总之,FANUC系统的参数众多,用于配置和控制机床或机器人的各种功能。
FANUC所有系统参数
FANUC所有系统参数1.轴参数:FANUC系统可以控制多个轴,每个轴都有自己的参数。
这些参数包括轴的最大速度、加速度和减速度,轴的分辨率和精度等。
通过调整这些参数,可以改变轴的运动性能,以适应不同的加工需求。
2.切削参数:切削参数用于控制刀具的运动。
这些参数包括切削速度、进给速度和进给量等。
通过调整这些参数,可以控制切削过程中刀具的运动轨迹和速度,从而实现不同的加工效果。
3.进给参数:进给参数用于控制工件在加工过程中的运动。
这些参数包括进给速度、进给量和加速度等。
通过调整这些参数,可以控制工件在加工过程中的运动轨迹和速度,以实现不同的加工需求。
4.插补参数:插补参数用于控制多个轴之间的相互作用。
这些参数包括插补速度、加速度和减速度等。
通过调整这些参数,可以控制轴之间的协调运动,以实现复杂的加工过程。
5.程序参数:程序参数用于控制加工程序的执行。
这些参数包括程序起始位置、程序停止位置和程序执行速度等。
通过调整这些参数,可以控制加工程序的执行过程,以实现不同的加工目标。
6.通信参数:通信参数用于控制FANUC系统与外部设备之间的通信。
这些参数包括通信速度、通信协议和通信地址等。
通过调整这些参数,可以实现FANUC系统与其他设备的数据交换。
7.报警参数:报警参数用于控制系统报警功能的设置。
这些参数包括报警等级、报警条件和报警响应方式等。
通过调整这些参数,可以根据实际需要设置系统的报警功能。
8.系统参数:系统参数用于控制FANUC系统的整体性能和功能。
这些参数包括系统的最大速度、加速度和减速度,系统的分辨率和精度等。
通过调整这些参数,可以提高系统的运行速度和精度,以满足不同的生产需求。
总之,FANUC系统具有多个不同的参数,通过调整这些参数,可以实现不同的机械加工和自动化生产需求。
不同的参数组合可以产生不同的加工效果,提高生产效率和产品质量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(4)关机再开机,用G28 X0,Y0,Z0核对机械参考点。
7.由机床参数引起的无报警故障。一台FANUC 18i-W慢走丝,开机后CRT显示X、Y、U、V坐标轴位置显示不准确,即原正常显示小数点后三位数字,而且前显示小数点后四位数字,且CRT没有报警信息。首先应该怀疑是参数变化引起上述故障。检查参数发现NO.0000#2 INI发生变化,原正常显示“0”(表示公制输入),而有故障时显示“1”(英制输入),将该参数改为“0”后,数字显示正常。
5001/1 TLB 刀长补偿轴 O
5001/2 OFH 补偿号地址D,H O
5001/5 TPH G45-G48的补偿号地址D,H O
5002/0 LD1 刀补值为刀号的哪位数 O
5002/1 LGN 几何补偿的补偿号 O
5002/5 LGC 几何补偿的删除 O
5002/7 WNP 刀尖半径补偿号的指定 O
5013 最大的磨损补偿值 O
50
3701/1 ISI 使用串行主轴 O O
3701/4 SS2 用第二串行主轴 O O
3705/0 ESF S和SF的输出 O O
3705/1 GST SOR信号用于换挡/定向 O
3705/2 SGB 换挡方法A,B O
3705/4 EVS S和SF的输出 O
3706/4 GTT 主轴速度挡数(T/M型) O
3706/6,7 CWM/TCW M03/M04的极性 O O
3708/0 SAR 检查主轴速度到达信号 O O
3708/1 SAT 螺纹切削开始检查SAR O
3730 主轴模拟输出的增益调整 O O
(3)将外部接收设备设定在STAND BY(准备)状态;
(4)先按EOB键不放开,再按OUTPOT键即将全部参数输出。
6.一台FANUC 0MC立式加工中心,由于绝对位置编码电池失效,导致X、Y、Z丢失参考点,必须重新设置参考点。
(1)将PWE“0”改为“1”,更改参数NO.76.1=1,NO.22改为00000000,此时CRT显示“300”报警即X、Y、Z轴必须手动返回参考点。
3744 第四挡主轴最高速度 O
3751 第一至第二挡的切换速度 O
3752 第二至第三挡的切换速度 O
3771 G96的最低主轴速度 O O
3772 最高主轴速度 O O
4019/7 主轴电机初始化 O O
光栅生效NO.1815.1=1 FSSB开放相应接口。
2.当机床开机后返回参考点时出现超行程报警。上述机床在返回参考点过程中,出现510或511超程报警,处理方法有两种:
(1)若X轴在返回参考点过程中,出现510或是511超程报警,可将参数0700LT1X1数值改为+99999999(或将0704LT1X2数值修改为-99999999)后,再一次返回参考点。若没有问题,则将参数0700或0704数值改为原来数值。
3105/0 DPF 显示实际进给速度 O O
3105/ DPS 显示实际主轴速度和T代码 O O
3106/4 OPH 显示操作履历 O O
3106/5 SOV 显示主轴倍率值 O O
3106/7 OHS 操作履历采样 O O
3107/4 SOR 程序目录按程序序号显示 O O
3290/2 MCV 用MDI键输入宏程序变量 O O
3290/3 WZO 用MDI键输入工件零点偏移量 O O
3290/4 IWZ 用MDI键输入工件零点偏移量(自动方式) O
3290/7 KEY 程序和数据的保护键 O O
8.编程参数
3202/0 NE8 O8000—8999程序的保护 O O
3111/7 NPA 报警时转到报警画面 O O
3112/0 SGD 波形诊断显示生效(程序图形显示无效) O O
3112/5 OPH 操作履历记录生效 O O
3122 操作履历画面上的时间间隔 O O
3203/7 MCL MDI方式编辑的程序是否能保留 O O
3290/0 WOF 用MDI键输入刀偏量 O O
5003/6 LVC/LVK 复位时删除刀偏量 O O
5003/7 TGC 复位时删除几何补偿量(#5003/6=1) O
5004/1 ORC 刀偏值半径/直径指定 O
5005/2 PRC 直接输入刀补值用PRC信号 O
5006/0 OIM 公/英制单位转换时自动转换刀补值 O O
3010 MF,SF,TF,BF滞后的时间 O O
3011 FIN宽度 O O
3017 RST信号的输出时间 O O
3030 M代码位数 O O
3031 S 代码位数 O O
3032 T代码位数 O O
3033 B代码位数 O O
7.显示和编辑
3102/3 CHI 汉字显示 O O
4.一台FANUC 0M数控系统加工中心,主轴在换刀过程中,当主轴与换刀臂接触的一瞬间,发生接触碰撞异响故障。分析故障原因是因为主轴定位不准,造成主轴头与换刀臂吻合不好,无疑会引起机械撞击声,两处均有明显的撞伤痕迹。经查,换刀臂与主轴头均无机械松动,且换刀臂定位动作准确,故采用修改N6577参数值解决,即将原数据1525改为1524后,故障排除。
3104/3 PPD 自动设坐标系时相对坐标系清零 O O
3104/4 DRL 相对位置显示是否包括刀长补偿量 O O
3104/5 DRC 相对位置显示是否包括刀径补偿量 O O
3104/6 DRC 绝对位置显示是否包括刀长补偿量 O O
3104/7 DAC 绝对位置显示是否包括刀径补偿量 O O
3202/4 NE9 O9000—9999程序的保护 O O
3401/0 DPI 小数点的含义 O O
3401/4 MAB MDI方式G90/G91的切换 O
3401/5 ABS MDI方式用该参数切换G90/G91 O
9.螺距误差补偿
3620 各轴参考点的补偿号 O O
3621 负方向的最小补偿点号 O O
NO.1850 零点偏置
四、SP调整参数
NO.3701.1=1 屏蔽主轴
NO.4020 电机最大转速
NO.3741 主轴低档转速(最高转速)
NO.3742 主轴高档转速(最高转速)
NO.4019.7=1 自动设定SP参数(即主轴引导)
NO.4133 主电机代码
NO.3111.6=1 显示主轴速度
FANUC系统有很丰富的机床参数,为数控机床的安装调试及日常维护带来了方便条件。根据多年的实践,对常用的机床参数在维修中的应用做一介绍。
1.手摇脉冲发生器损坏。一台FANUC 0TD数控车床,手摇脉冲发生器出现故障,使对刀不能进行微调,需要更换或修理故障件。当时没有合适的备件,可以先将参数900#3置“0”,暂时将手摇脉冲发生器不用,改为用点动按钮单脉冲发生器操作来进行刀具微调工作。等手摇脉冲发生器修好后再将该参数置“1”。
(2)同时按P和CAN键后开机,即可消除超程报警。
3.一台FANUC 0i数控车床,开机后不久出现ALM701报警。从维修说明书解释内容为控制部上部的风扇过热,打开机床电气柜,检查风扇电机不动作,检查风扇电源正常,可判定风扇损坏,因一时购买不到同类型风扇,即先将参数RRM8901#0改为“1”先释放ALM701报警,然后在强制冷风冷却,待风扇购到后,再将PRM8901改为“0”。
NO.3111.5=1 显示负载监视器
NO.4001.4 主轴定位电压极性(定位时主轴转向)
NO.3705.1=1 SOR用于换档
NO.3732=50 换档速度
NO.4076=33 定位速度
NO.4002.1=1 外接编码器生效
NO.4077 定位脉冲数(主轴偏置)
NO.3117.0=1 显示主轴负载表
5.密级型参数0900~0939维修法。按FANUC 0MC操作说明书的方法进行参数传输时,密级型参数0900~0939必须用MDI方式输入很不方便。现介绍一种可以传输包含密级型参数0900~0939在内的传输方法,步骤如下:
(1)将方式开关设定在EDIT位置;
(2)按PARAM键,选择显示参数的画面;
3731 主轴模拟输出时电压偏移的补偿 O O
3732 定向/换挡的主轴速度 O O
3735 主轴电机的允许最低速度 O
3736 主轴电机的允许最低速度 O
3740 检查SAR的延时时间 O O
3741 第一挡主轴最高速度 O O
3742 第二挡主轴最高速度 O O
3743 第三挡主轴最高速度 O O
3622 正方向的最大补偿点号 O O
3623 螺补量比率 O O
3624 螺补间隔 O O
10.刀具补偿
3109/1 DWT G,W分开 O O
3290/0 WOF MDI设磨损值 O O
3290/1 GOF MDI设几何值 O O
5001/0 TCL 刀长补偿A,B,C O
(2)关机再开机,利用手轮将X、Y移至参考点位置,改变参数NO.22为00000011,则表示X、Y已建立了参考点。
(3)将Z轴移至参考点附近,在主轴上安装一刀柄,然后手动机械手臂,使其完全夹紧刀柄。此时将参数NO.22改为00000111,即Z轴建立参考点。将NO76.1设“00”,PWE改为0。
8。机床风扇报警,一时找不到,要买也来不及,可以修改一下参数8901,将风扇报警取消,暂时先开机加工。等买到风扇再更换。(FANUC 18 OR FANUC16 OR FANUC 0I SYSTEM)