全站仪后方交会标准差算法 -回复
大数据时代测边后方交汇的计算公式及精度分析
大数据时代测边后方交汇的计算公式及精度分析摘要在图根控制测量中,交会定点是一种常用、简单的加密平面控制点的方法。
目前,随着全站仪的广泛使用,除了可以采用传统的测角交会方法外,测边交会加密平面控制点方法的运用越来越普遍。
但现在关于测边交会定点的计算主要是采用间接计算公式,公式推导不仅复杂,而且计算不易掌握。
基于此,本文就针对测边后方交汇的计算公式及精度进行分析研究。
关键词测边后方交汇;计算公式;精度分析前言由于测边后方交会定点具有布点灵活、施测方便、无须已知点之间互相通视且计算简便等优点,尤其在全站仪已普及应用的情况下,优点更为明显。
随着电子技术和计算机技术的发展,全站仪的测角和测距性能得到了很大程度的提高。
很多全站仪的测量、记录、数据预处理、显示等多种模块都向着智能化、集成化的方向发展,这样就大大减少了测设过程中的误差来源,提高了测量数据的精度。
1 测边后方交会定点的计算公式在实际的生产过程中,常常因工期紧,任务重,各项工作交叉进展,导致原有的测量控制点遭到不同程度的破坏,给施工测量工作带来了很大的困难。
例如两控制点不通视,在设备安装时某些部件上的控制点上只能放棱镜而不适宜架设仪器等情况。
以往为了解决工程测量中出现的这些问题,常用极坐标法、直角坐标法、无定向导线法等测设方法来确定加密点,这些方法不但工作量大,而且加密点往往达不到原有控制点的精度[1]。
而传统的后方交会方法是通过在加密点上观测3个已知方向的水平夹角来计算测站的平面坐标,它要求加密点不能位于由3个已知点构成的危险圆附近。
由于这些条件在城市工程测量中较难满足而限制了传统后方交会方法的使用。
为此,本文提出了测边后方交会方法。
它是通过在加密点P上安置全站仪,在已知点A、B上安置反射镜,通过测量水平距离P A、PB和水平角V,计算测站点的平面坐标。
与传统后方交会方法比较,测边后方交会只需要在加密点上观测附近任意两个已知点的水平距离和水平角就可以计算出测站点的坐标。
徕卡TS60全站仪操作说明书V1.3

徕卡TS60全站仪操作说明书2016年6月26日For Leica Captivate v1.3角度测量测角精度1Hz, V 0.5"(0.15mgon)原理测角方式绝对编码,连续,四重轴系补偿距离测量(棱镜)范围2棱镜(GPR1,GPH1P )31.5m ~3500 m 测距精度单次2,5/连续2,50.6mm + 1ppm /3mm+1.5ppm 测量时间单次2,5/连续2,5典型2.4秒/典型0.15秒距离测量(长测程模式)范围2长测程模式2,4,512000m 距离测量(无棱镜)范围2无棱镜(任意表面)41.5米至>1000m 精度/测量时间单次(任意表面)2,4,5,62mm + 2ppm / 典型3s激光光斑大小50m 处8mm x 20mm 测距技术基于相位原理系统分析技术同轴红色可见光徕卡TS60超高精度全站仪技术参数1.标准差,依据ISO17123‐32.阴天,无雾霾,能见度40KM ,无热流闪烁3.1.5m 至2000m ,使用360度棱镜(GRZ4,GRZ122)4.测量目标处于阴影下,阴天,柯达灰白板(90%反射率)5.标准差,依据ISO17123‐46.距离>500m :精度4mm+2ppm,测量时间典型6秒徕卡TS60超高精度全站仪技术参数驱动驱动方式压电陶瓷驱动技术不需任何齿轮,仪器损耗小,更经久耐用电能直接转换为机械能,不产生磁场也不会被磁场干扰。
在测量以及瞄准过程中镜头不会抖动,保证测量精度。
通过控制热量的产生以及消散从而保证TS60的最高测距精度转速转速180°(200gon )/ s 倒镜时间2.9s 自动目标识别(ATR plus )ATR 2模式及工作范围可自动找目标测量圆棱镜(GPR1,GPH1P)1500m 360°棱镜(GRZ4, GRZ122)1000m LOCK 2模式及工作范围适用于动态实时跟踪监测目标圆棱镜(GPR1,GPH1P)1000m 360°棱镜(GRZ4, GRZ122)1000m 精度1,2/测量时间ATRplus 测角精度(Hz ,V)0.5″(0.15mgon)测量时间(GPR1)典型3 –4s 超级搜索PS (Power Search)测程360°棱镜(GRZ4, GRZ122)300米搜索时间一般典型5秒徕卡TS60超高精度全站仪技术参数图像广角相机和望远镜相机传感器500万像素CMOS传感器视场(广角相机/望远镜相机)19.4°/1.5°帧频率高达20帧每秒导向光(EGL)工作范围/精度5‐150m/典型5cm,100m处综合数据自动对焦望远镜放大倍数/ 调焦范围30x / 1.7m至无穷远机载软件系统Captivate软件(含应用程序)接口RS232,USB,Bluetooth®,wlan处理器TI OMAP4430 1GHZ 双核ARM®CortexTM‐A9 MPCoreTM操作系统‐Windows EC7键盘和显示屏显示/ 键盘WVGA, 5英寸,彩色触摸屏, 双面/ 37键,带屏幕,键盘照明数据存储内存2G存储卡SD卡可配1G或8G/U盘徕卡TS60超高精度全站仪技术参数操作微动螺旋3个无限位微动螺旋,一个伺服对焦驱动,两个自动对焦按键,可进行单手或双手操作自定义键√智能电源管理内置电池(GEB242)可更换锂电池,具备直接给机身电池充电功能操作时间/ 电池容量7‐9h / 5.8Ah 重量包括电池7.7kg 环境指标工作温度‐20℃至+50℃(‐4°F 至+122°F)防尘/防水(IEC 60529)/防雨IP65 /MIL ‐STD ‐810G,方法506.5‐I防潮IP65 / 95%, 无冷凝目录一、操作面板/图标介绍二、测前准备三、设站定向四、测量五、放样六、数据批量导入导出七、GeoCOM联机测量设置八、仪器四重轴系误差检校九、其他设置1.开机:按住2 s 打开。
全站仪后方交会法步骤和高程测量步骤

1、角度测量(angleobservation)?(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB,则:1)当精度要求不高时:瞄准A点——置零(0SET)——瞄准B点,记下水平度盘HR的大小。
2)当精度要求高时:——可用测回法(methodofobservationset)。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(HSET)。
2、距离测量(distancemeasurement)?PSM、PPM的设置——测距、测坐标、放样前。
1)棱镜常数(PSM)的设置。
一般:PRISM=0(原配棱镜),-30mm(国产棱镜)2)大气改正数(PPM)(乘常数)的设置。
输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。
(1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS)。
3、坐标测量(coordinatemeasurement)?(1)功能:可测量目标点的三维坐标(X,Y,H)。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:?坐标:?若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有:高程:?(3)方法:?输入测站S(X,Y,H),仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标。
4、点位放样(Layout)?(1)功能:根据设计的待放样点P的坐标,在实地标出P点的平面位置及填挖高度。
全站仪高程及后方交会法要点

观测时设站和定向只做一次,数据采集可根据实地点数目任意进行。
பைடு நூலகம்
瞄准后视控制点,直接输入后视点坐标或选择一个存于机内的坐标点
你在建站的时候输入站点高程和后视点高程,测量时再输入棱镜高,则测量时就直接是高程了,但全站仪测出来的高程精度不高 ,不建议采用!
拓普康
3.数据采集:
瞄准目标并测量之,输入毡标高(有的叫凌镜高)。
经过这些步骤待测点的坐标和高程就测回来了。具体操作要按仪器提示进行(每一步可能是一个菜单选项,注意要按“确定“或“OK”)
“待测点高度仪器读数0.5m”不知是不是指待测点与设站点之间的高差。
假设设站点A,待测点B,则HA+h=HB+i(棱镜高)-d高差
即实际高度是:HA+h-i+d高差=1.43+0.5-1.2=0.73M
其中HA+h是指视线高,即你所说的仪器高度1.43m。
不过我还是对你的描述有些不解!
方法一:
架设C为已知高程点Hc,B为未知高程点,高程记为Hb
将全站仪架设在C点精确对中整平,用钢卷尺量取仪器高度记为i,在B点架设棱镜精确对中整平,量取棱镜高度记为v,用全站仪望远镜精确照准棱镜中心,按下测距按键,得出AB水平距离D,读出竖盘读数A,则可得到B点高程:Hb=Hc+DTanA+i-v
2.定向,将全站仪望远镜瞄准另一已知高程点B,输入B点所有已知数据后,按确认键完成。
(如果仅已知高程,那就把其他需要输入的项全部架设,棱镜高必须用卷尺量取,并真实输入)
3.照准其他任何你想要测量高程的点按测量键,仪器就会显示该待测点的坐标和高程(如果前面建站和定向都用的假设坐标,此处得到的坐标当然也是假定的,但是高程是完全正确的)
全站仪测量高程到底有几种方法

全站仪测量高程到底有几种方法。
方法一:经典方法,全站仪在已知坐标(含高程)点上设站;方法二:后方交会,全站仪在任意点上设站;方法三:对边测量,全站仪测两点高差。
下面对三种方法进行阐述:方法一:经典方法先说方法一。
说这个方法是经典方法,是因为:1.其测量原理我们在学习经纬仪视距测量时就学习过,每种测量教材中都有;2.测量教材中有关全站仪高程测量原理,都按此原理进行阐述;3.全站仪高程测量的相关设置,都按此原理进行的。
到底什么测量原理呢,我们来回顾一下,看下图:我们从(1)式中可以发现,全站仪一旦设站完成,测站高程和仪器高度均为定值,若测量过程中不改变棱镜高度,则除了Ssina(即实测参数)外,等式右侧其它各参数之和均为恒等值,由此我们可以得出:全站仪一旦设定,同时不再改变棱镜高度的话,全站仪对各点的测量高差,其实质是每个三角高差dZ的差值这个结论我们先记住,它将是后面方法二和方法三的理论基础。
方法二:后方交会说实话,我也不知道叫“后方交会”是否准确,因为这个名字一般是指:在全站仪平面测量时,全站仪自由设站,通过测量并输入测站外两个已知点的平面坐标,从而完成设站的工作。
而这里是指全站仪在高程测量前,全站仪自由设站,通过测量测站外一个已知高程点,再通过全站仪相关的设置,从而完成全站仪高程测量设站的工作。
我们还是继续对照着这张老图进行分析:方法三:对边测量方法三的测量方法是一个纯粹的高差测量,操作也相当简单:全站仪架设在任意位置,不做任何高程测量的设置(即测站高程、仪器高、棱镜高均使用仪器内存值),分别对两个点测量其三角高差dZ(要保证棱镜高度不变),两者之差即为两点之高差,跟水准测量的后视减前视相反,这里应该是前视减后视。
其测量原理,在方法一中已经验证,在此不再赘述。
各种方法的适用情况:方法都出来了,都有测量原理,都是可行的,如果硬要说哪种方法好,本身这个问题就是个伪问题,因为每种方法各有优势,如果不结合实际情况,便不能确定到底哪种方法要好。
《全站仪操作》实训项目任务清单及考核标准

《全站仪操作》实训项目任务清单及考核标准任务一、天宇全站仪坐标测量及坐标放样(60学时)任务二、科力达全站仪坐标测量及坐标放样(30学时)任务三、全站仪对边、悬高、后方交会测量(30学时)任务四、全站仪面积测量(30学时)《全站仪操作实训》实操考核项目考核标准任务一、天宇全站仪数据采集—放样实操项目考核标准一、说明1.编制依据:《工程测量员国家职业技能鉴定标准》、《工程测量规范》 GB 50026-2007等设计编制。
2.适用范围:测量实训学生。
二、技能目标能够掌握测能够掌握仪器安置,望远镜调节方法、建站及建站质量检查、数据采集及测设方法步骤、记录、计算。
三、技术要求1.考核所用工具、材料:设备仪器:天宇全站仪、棱镜、钢尺等。
2.场地:建筑实训地基3.考核操作时间60min四、评分标准:天宇全站仪数据采集—放样实操项目考核标准考评员:五、记录表格:全站仪数据采集—放样记录表观测者:开始时间:结束时间:仪器型号及编号:天气:备注:综合评分以小组结合个人给定,在记录表备注栏注明观测者和记录者名字《全站仪操作实训》实操考核项目考核标准任务二、科力达全站仪数据采集—放样实操项目考核标准一、说明1.编制依据:《工程测量员国家职业技能鉴定标准》、《工程测量规范》 GB 50026-2007等设计编制。
2.适用范围:测量实训学生。
二、技能目标能够掌握测能够掌握仪器安置,望远镜调节方法、建站及建站质量检查、数据采集及测设方法步骤、记录、计算。
三、技术要求1.考核所用工具、材料:设备仪器:科力达全站仪、棱镜、钢尺等。
2.场地:建筑实训地基3.考核操作时间60min。
四、评分标准:科力达全站仪数据采集—放样实操项目考核标准考评员:五、记录表格:全站仪数据采集—放样记录表观测者:开始时间:结束时间:仪器型号及编号:天气:备注:综合评分以小组结合个人给定,在记录表备注栏注明观测者和记录者名字《全站仪操作实训》实操考核项目考核标准任务三、全站仪对边测量-悬高测量实操项目考核标准一、说明1.编制依据:《工程测量员国家职业技能鉴定标准》、《工程测量规范》 GB 50026-2007等设计编制。
全站仪后方交会在地形图修测中的应用
简单的分析 , 结合作者的实际测绘 经验 , 提出在实际测量 中须 要注意 的某 些事项 : 1待 定点与 各 已知 点夹角的 () 合理性 ;2 两点后方交会 的待定 点坐标象 限等 ; () 同时也简单说 明全蛄仪后方交会在地形 图修测 中的应用 。
[ 关键 词] 全站仅后 方交会 ; 形图; 地 修测 ; 应用 [ 中图分类号] P 1 2 [ 献标 识码 ] C 文 [ 文章编 号] 10 77 (0 2 ̄ — 03— 2 06— 15 21 )2 0 9 0 X
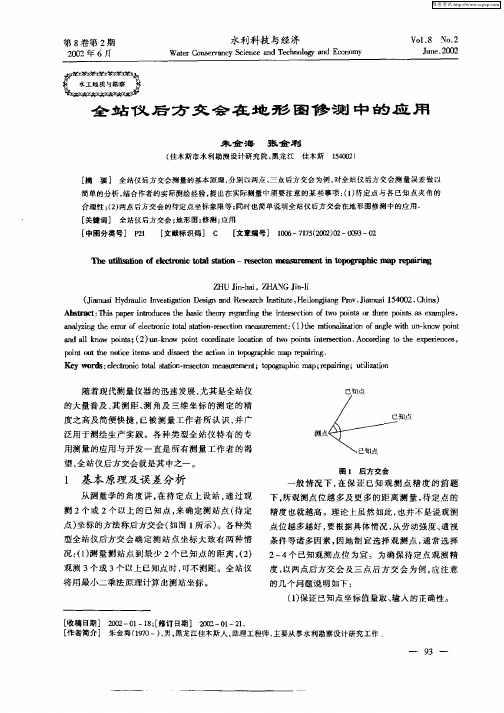
型全站 仪后方交 会 确 定 测站 点 坐标 大 致 有两 种 情 况 :1测 量测 站 点 到 最少 2个 已知 点 的 距 离 ,2 () ()
观测 3 或 3个 以上 已知 点 时 , 个 可不测距 。全站仪
2— 4个 已知观测 点位 为宜 。为 确保 待定 点 观测 精 度 , 两点后方交 会 及三 点后 方 交 会 为例 . 注意 以 应
ada nw pis ( ) nk o o t or nt l a o fw o t n r co . codn eepr ne . n l k o o t; 2 u —nw pi o ia c t no top i  ̄i e et n A cri t t xei cs l n nc d e ci n ts i g oh e
V 1 0 舟
No 2 .
J n .0 2 u e20
全 站 仪 后 方 交 会 在 地 形 图 修 测 中 的 应 用
未 金 海 张 金 利
佳术斯 140 ) 50 2
( 术斯市水利勘测设计 研究院 , 佳 黑龙江
[ 摘
要 ] 全站仪 后方交会测量的基本原理 , 分别 以两 点、 三点后 方交会为例 , 全站 仪后方交会 测量误差做 以 对
全站仪后方交会法步骤和高程测量步骤说课材料
全站仪后方交会法步骤和高程测量步骤1、角度测量(angle observation)(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠ AOB ,则:1)当精度要求不高时:瞄准 A 点——置零( 0 SET )——瞄准 B 点,记下水平度盘 HR 的大小。
2)当精度要求高时:——可用测回法( method of observation set )。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”( H SET )。
2、距离测量( distance measurement )PSM 、PPM 的设置——测距、测坐标、放样前。
1)棱镜常数(PSM )的设置。
一般: PRISM=0 (原配棱镜),-30mm (国产棱镜)2)大气改正数( PPM )(乘常数)的设置。
输入测量时的气温( TEMP )、气压( PRESS ),或经计算后,输入 PPM 的值。
(1)功能:可测量平距 HD 、高差 VD 和斜距 SD (全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”( MEAS )。
3、坐标测量( coordinate measurement )(1)功能:可测量目标点的三维坐标( X , Y , H )。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:坐标:若输入:测站 S 高程,测得:仪器高 i ,棱镜高 v ,平距,竖直角,则有:高程:(3)方法:输入测站 S ( X , Y ,H ),仪器高 i ,棱镜高 v ——瞄准后视点 B ,将水平度盘读数设置为——瞄准目标棱镜点 T ,按“测量”,即可显示点 T 的三维坐标。
全站仪后方交会标准差算法
全站仪后方交会标准差算法
全站仪后方交会是通过测量不同位置上的目标点的坐标,并利用这些坐标计算目标点在三维空间中的坐标。
后方交会标准差算法用于评估测量结果的精度或误差程度。
后方交会标准差算法主要包括以下步骤:
1. 计算观测向量:根据测量仪器的观测数据,计算出每个目标点的观测向量。
观测向量包括水平方向角、垂直方向角和斜距。
2. 计算测量坐标:利用观测向量和仪器初始坐标,计算出每个目标点的测量坐标。
测量坐标可以通过坐标变换或三角测量法计算得出。
3. 计算留差:将测量坐标代入方程,计算出每个目标点的留差。
留差是指实际测量值与标准值之间的差异。
4. 计算改正数:通过留差的平均值、方差和协方差矩阵,计算出每个目标点的改正数。
改正数用于修正观测向量和测量坐标。
5. 重新计算测量坐标:利用改正数对观测向量和测量坐标进行修正,得到最终的测量坐标。
6. 计算标准差:通过留差和改正数,计算出每个目标点的标准差。
标准差用于描述测量结果的精度或误差程度。
后方交会标准差算法的具体计算公式可以根据不同的测量方法和误差模型进行调整。
常用全站仪功能测量方法简介

此文转自他人,仅供学习参考。
(九)悬高测量( REM ) *为了得到不能放置棱镜的目标点高度,只须将棱镜架设于目标点所在铅垂线上的任一点,然后测量出目标点高度 VD 。
悬高测量可以采用“输入棱镜高”和“不输入棱镜高”两种方法。
1、输入棱镜高(1)按 MENU ——P1 ↓—— F1(程序)—— F1(悬高测量)—— F1(输入棱镜高),如:1.3m 。
(2)照准棱镜,按测量( F1 ),显示仪器至棱镜间的平距 HD —— SET (设置)。
(3)照准高处的目标点,仪器显示的 VD ,即目标点的高度。
2、不输入棱镜高(1)按 MENU ——P1 ↓—— F1(程序)—— F1(悬高测量)—— F2(不输入棱镜高)。
(2)照准棱镜,按测量( F1 ),显示仪器至棱镜间的平距 HD —— SET (设置)。
(3)照准地面点 G ,按 SET (设置)(4)照准高处的目标点,仪器显示的 VD ,即目标点的高度。
(十)对边测量( MLM ) *对边测量功能,即测量两个目标棱镜之间的水平距离( dHD )、斜距 (dSD) 、高差 (dVD) 和水平角 (HR) 。
也可以调用坐标数据文件进行计算。
对边测量 MLM 有两个功能,即:MLM-1 (A-B ,A-C):即测量 A-B ,A-C ,A-D ,…和 MLM-2 (A-B ,B-C):即测量A-B, B-C ,C-D ,…。
以 MLM-1 ( A-B ,A-C )为例,其按键顺序是:1、按 MENU ——P1 ↓——程序( F1 )——对边测量( F2 )——不使用文件( F2 )—— F2 (不使用格网因子)或 F1 (使用格网因子)—— MLM-1 ( A-B , A-C )( F1 )。
2、照准 A 点的棱镜,按测量(F1),显示仪器至 A 点的平距 HD —— SET (设置)3、照准 B 点的棱镜,按测量(F1),显示 A 与 B 点间的平距 dHD 和高差 dVD 。
拓普康全站仪后方交会测量操作入门方案

4. 进入后视定向界面 (二)由测站设置界面进入
用触笔点击[测量],出现如下下拉菜单:
拓普康(中国)技术中心 86-10-67802799
点击[测站设置],弹出后视定向的设置页面
拓普康(中国)技术中心 86-10-67802799
在后视测量界面 用触笔点击该按
钮。
拓普康(中国)技术中心 86-10-67802799
选中[选项]菜单项,
拓普康(中国)技术中心 86-10-67802799
进入后方交会设置界面,如图所示设置好各个选项, 交会类型:三维; 启用[估算尺度比]选项; 启用[使用计算的比例因子]选项;
注:尺度比就是拓 普康全站仪以前的 术语“比例因子”, 为了和GPS统一, 现在称为“尺度 比”。
4. 进入后方交会界面(两种方式) (一)由菜单直接进入
在主菜单点击[测量],弹出下拉菜单,如下图所示:
点击[后方交会],
拓普康(中国)技术中心 86-10-67802799
输入测站点点号,棱镜高HR和仪器高HI, 点击〔继续〕进入后视定向界面
拓普康(中国)技术中心 86-10-67802799
拓普康(中国)技术中心 86-10-67802799
3. 输入进行后方交会的已知点的坐标
用触笔点击[编辑],出现如下下拉菜单: 点击[点],进入如下界面,进行 已知点的输入
拓普康(中国)技术中心 86-10-67802799
点击[增加],输入已知点(注意要选中控制点) 点击[确定],一个新的已知点输 入完成
弹出如下所示的下拉菜单:
选择[后方交会]菜单项,进入后视定向界面
拓普康(中国)技术中心 86-10-67802799
6. 进行后方交会设置
后方交会方法及其精度评定问题的研究_朱宝训-ok

第12卷 第3期2004年9月 山东交通学院学报JOUR NAL OF SHANDON G JIAOTON G UNIVERSITY Vol .12No .3 Sep .2004后方交会方法及其精度评定问题的研究朱宝训,刘成龙,杨天宇(西南交通大学 土木工程学院,四川成都 610031)摘要:基于3个已知点的后方交会,推导了测角、测边后方交会的近似精度评定公式以及针对起算数据误差时的严密精度评定公式,并用间接平差方法对边角同测后方交会进行了严密的平差计算与精度评定;通过观测实验分别对测角、测边、边角同测后方交会的精度及坐标进行了比较分析。
关 键 词:后方交会;测边;测角;边角;起算数据误差中图分类号:TU198 文献标识码:A文章编号:1672-0032(2004)03-0026-04在工程测量中,后方交会是测量定位、控制网加密和自由设站法施工放样的重要方法之一。
传统的后方交会是以测角为主,随着电子测距仪在生产中的普遍应用,距离后方交会定位法日益得到应用。
目前,全站仪已逐渐普及,利用全站仪可以方便地同时测角和边,因此在实际工作中,就存在测边、测角、边角同测后方交会坐标计算问题以及它们的精度评定问题。
文献[1]、[2]分别对两个已知点边角同测的精度进行了探讨,本文以常用的3个已知点的后方交会为例,研究合理的后方交会坐标计算及其精度评定方法,并通过实验分别对测角、测边、边角同测后方交会的精度及坐标进行了比较分析。
1 测角后方交会如图1所示,已知A ,B ,C 点的坐标A (x A ,y A ),B (x B ,y B ),C (x C ,y C ),观测角度α,β,求待定点P 的坐标P (x P ,y P )。
图1 后方交会示意图因3个已知点的测角后方交会问题无多余观测,求P 点坐标的计算公式为[3]:x P =x B +Δx BP ,y P =y B +Δy BP ,式中 Δy BP =Δx BP tan αBP ,Δx BP =(y B -y A )(cot α-tan αBP )-(x B -x A )(1+c ot αtan αBP )1+tan αBP,其中 tan αBP =(y B -y A )cot α+(y B -y C )cot β+(x A -x C )(x B -x A )cot α+(x B -x C )cot β-(y A -y C ).求得不考虑原始数据误差影响时P 点在X ,Y 方向的坐标精度评定公式分别为:m 2x P=(F 1+ F 2)2m 2αρ2+(φF 2)2m 2βρ2,m 2y P=[(F 1tan αBP + (F 2tan αBP +Δx BP )]2m 2αρ2+[φ(F 2tan αBP +Δx BP )]2m 2βρ2,式中 F 1=Δx AB tan αBP -Δy A B (1+tan 2αBP )sin 2α,F 2=-2Δx BP tan αBP +Δy AB +Δx AB cot α1+tan 2αBP,ρ=206265(″), =M Δx AB -N Δy A B N 2sin 2α,φ=M Δx CB -N Δy CB N 2sin 2β, 收稿日期:2004-06-08 作者简介:朱宝训(1974-),男,山东日照人,西南交通大学硕士研究生.其中 M =(y B -y A )cot α+(y B -y C )c ot β+(x A -x C ),N =(x B -x A )cot α+(x B -x C )cot β-(y A -y C ).考虑原始数据误差影响时P 点在X ,Y 方向的坐标精度评定公式分别为m 2x ′P =(F 2a 1-n l )2m 2x A +(F 2a 2-m l )2m 2y A +(1+F 2a 3+n l)2m 2x B +(F 2a 4+m l)2m 2y B +(F 2a 5)2m 2x C +(F 2a 6)2m 2y C +m 2x P ,m 2y ′P =(ωa 1-tan αBP n l )2m 2x A +(ωa 2-tan αBP m l )2m 2y A +(ωa 3+tan αBP n l)2m 2x B +(1+ωa 4+tan αBP m l)2m 2y B +(ωa 5)2m 2x C +(ωa 6)2m 2y C +m 2y P ,式中 ω=F 2tan αBP +Δx BP ,a 1=M cot α+N N 2,a 2=M -N cot αN 2,a 3=-M (cot α+cot β)N2,a 4=(cot α+cot β)N ,a 5=M cot β-N N 2,a 6=-N c ot β+M N2,m =cot α-tan αBP ,n =1+c ot αtan αBP ,l =1+tan 2αBP .2 测边后方交会图1中,S 1,S 2,S 3为已知点构成的三角形的边,L 1,L 2,L 3为观测边,∠1、∠2为辅助角,求待定点的坐标P (x P ,y P )。
全站仪测坐标的方法

全站仪测坐标的方法全站仪,是一种集光、机、电为一体的高技术测量仪器,是当前地形测图中的主要测量仪器,具有精度高、操作简便等特点。
随着科学技术的发展,全站仪在工程建设中的应用越来越广泛,特别是近几年来,它的应用已普及到各个领域。
为了更有效地使用全站仪进行工程建设,提高测图精度和效率,本文结合实践经验,就全站仪测坐标的方法进行了总结,以便大家在实际工作中参考使用。
一、全站仪的构造及使用注意事项全站仪主要由测距部分、电子补偿部分、光学望远镜、程序存储部分、控制系统等组成。
在使用过程中,需要注意以下几点:1. 必须熟悉全站仪的基本操作方法,注意按照说明书进行操作。
2. 仪器搬站前,应保证电池电压充足,并检查机器各部件是否完好。
3. 在测量时,一般要求仪器安稳,避免在冰雪、尘土等导电介质上测量。
4. 在利用电台时,应保持发射频率的稳定和正确。
5. 在测量过程中,禁止对镜头施加任何外力。
6. 禁止在开机时将望远镜对准太阳,防止损伤望远镜的光轴。
(一)后方交会法这种方法是通过已知点来测定未知点坐标的方法。
它实质上是一种间接的全站仪测量方法。
这种方法需要注意:一是要将转点的测距归零;二是对每个角的两个方向上两个不同位置的棱镜进行测距;三是与起始方向或角度闭合差相一致的选择待定点;四是在记录观测数据时要用已知点坐标进行计算核对。
另外在待定点间传递数据的方法也要根据情况而定。
通常由一个人逐点进行操作:一人插棱镜;一人安置仪器并观测前视和后视方向的标尺分划;一人记录观测数据;一人负责传递数据;一人负责检查测距限差并随时报告异常情况。
(二)极坐标法这种方法是在已知点上架设仪器,通过输入已知点数据、测站点坐标、仪器高、待定点方向坐标和高程等数据来测定待定点平面坐标和高程的方法。
具体步骤如下:1. 将仪器安置在测站上,对中、整平后开机。
2. 输入测站点的数据(包括点名、坐标、仪器高等),检查电池电压,检查仪器各部件是否完好。
全站仪使用方法及坐标计算讲解

全站仪使用方法及坐标计算讲解大家都知道随着建筑工程和仪器设备的发展,全站仪现已替代了经纬仪广泛应用于建筑工程中。
为了更好的掌握测量放线知识,今天对全站仪的使用和坐标计算和大家相互交流学习一下。
在使用本仪器之前, 要把各种注意事项烂熟于心,务必检查并确认该仪器各项功能运行正常。
1、不要将仪器直接对准太阳将仪器直接对准太阳会严重伤害眼睛。
若仪器的物镜直接对准太阳,也会损坏仪器。
2、将仪器架设到脚架上在架设仪器时,若有可能,请使用木脚架。
使用金属脚架时可能引起的震动会影响测量精度。
3、安装基座若基座安装不正确,也会影响测量精度。
请经常检查基座上的调节螺旋,并确保基座联结照准部的螺杆是锁紧的。
基座上的中心固定螺旋旋紧。
4、使仪器免受震动当搬运仪器时,应进行适当保护,使震动对仪器造成的影响最小。
5、提仪器要点当提仪器时,请务必抓紧仪器的把手。
6、高温环境不要将仪器放在高温环境中的时间过长,否则会影响仪器的性能。
7、温度突变仪器或棱镜的温度突变会引起测程的缩短,如将仪器从热的汽车中取出,这时应将仪器放置一段时间使之适应环境温度,再开始测量。
8、电池检查在作业前请确认电池中所剩容量9、取出电池建议当处于仪器开机状态时不要取下电池。
否则,所有存储的数据可能会丢。
故请仪器关机后取下和安装电池。
测量准备1、仪器安放(1)安放三脚架首先将三脚架三个架腿拉伸到合适位置上,紧固锁紧装置;(2)把仪器放在三脚架上小心地把仪器放在三脚架上,通过拧紧三脚架上的中心螺旋使仪器与三脚架联结紧固。
2、仪器整平(1)用圆水准器粗整平仪器相向转动两只脚螺旋使气泡移至垂直于两只脚螺旋连线的圆水准器线上。
转动另一只脚螺旋,使水泡居于圆水准器中心。
(2)用长水准器精确整平仪器松开水平止动手轮,转动仪器使长水准器与两只脚螺旋连线平行;相向转动脚螺旋,使水泡居于长水准器的中心;松开水平止动手轮,转动仪器90°;转动另一只脚螺旋,使水泡居于长水准器的中心;重复以上步骤,直至仪器转动任意位置时,水泡都能居于长水准器的中心。
全站仪自由设站法及精度分
! # #
V2=Bδx- bδy+l 2,P=1
# # #
V3=Cδx- cδy+l 3,P=1
"##(10)
#
#
[V]=(A+B+C)δx- (a+b+c)δy+l
, 1
+l
, 2
+l
3,P=-
1 3
# # # ## $
组成法方程
% &% &% & %Paa
%Pab
&%Pab &%Pbb
& &
δx δy
P 点 坐 标 从 (2000, 2500)、( 2100, 2500) 、
( 2200, 2500) …… 一 直 到( 3000, 2500) 。 表 1 中
的 数 据 是 观 测 A、B、C 三 已 知 点 所 得 的 P 点 的
点位精度。表 2 中的数据是观测 A、B、C、D 四已
知点所得的 P 点的点位精度。
· 12 ·
江西测绘
2007 年
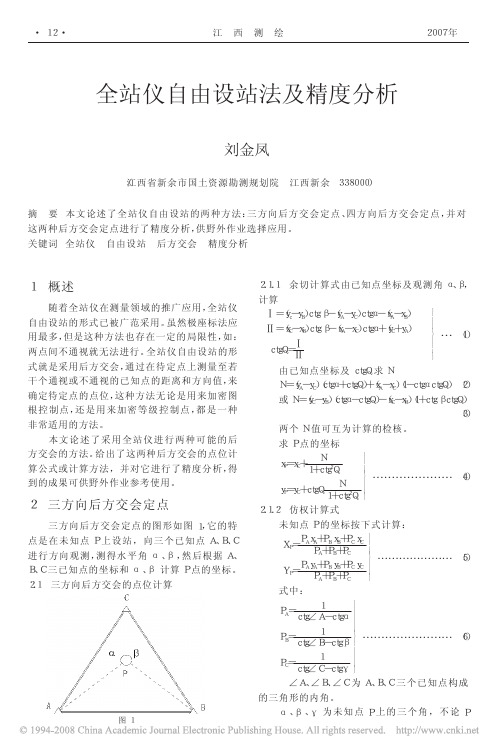
全站仪自由设站法及精度分析
刘金凤
(江西省新余市国土资源勘测规划院 江西新余 338000)
摘 要 本文论述了全站仪自由设站的两种方法: 三方向后方交会定点、四方向后方交会定点, 并对 这两种后方交会定点进行了精度分析, 供野外作业选择应用。 关键词 全站仪 自由设站 后方交会 精度分析
参考文献: [1] CJJ61- 2003《城市地下管线探测技术规程》( 北京 中
国 建 筑 工 业 出 版 社)
δx-
ρcosαPA SPA
δy+l 1,P=1
! # # # #
#
VPB=-
ξ+
ρsinαPB SPB
后方交会法原理
后方交会法原理在测量领域中,后方交会法是一种常用的方法,它可以用于确定已知控制点的位置以及未知点的坐标。
后方交会法是基于三角形相似原理的测量技术,它可以通过对已知控制点的距离和方位角度的测量,来计算出未知点的坐标。
本文将详细介绍后方交会法的原理和应用。
一、后方交会法原理后方交会法是基于三角形相似原理的测量技术,它是通过已知控制点的位置和方位角度的测量,来计算未知点的坐标。
具体来说,后方交会法的原理包括以下几个步骤:1.测量控制点的位置和方位角度在后方交会法中,需要测量已知控制点的位置和方位角度。
控制点是已知坐标的点,通常是在测量区域的边界或者是在地面上的显著点。
测量控制点位置的方法有很多种,包括全站仪、GPS等。
方位角度是指测量点相对于一个已知方向的角度,可以通过全站仪或者经纬仪等测量仪器来测量。
2.测量未知点与控制点之间的距离和角度在已知控制点的基础上,需要测量未知点与控制点之间的距离和角度。
距离可以通过测距仪等仪器来测量,角度可以通过全站仪等仪器来测量。
需要注意的是,测量时需要保证控制点与未知点之间的视线畅通,以确保测量的准确性。
3.计算未知点的坐标通过已知控制点的坐标、方位角度和未知点与控制点之间的距离和角度,可以利用三角形相似原理来计算未知点的坐标。
具体计算公式如下:X = X0 + L * sin(A + α)Y = Y0 + L * cos(A + α)其中,X0和Y0是已知控制点的坐标,A是控制点与未知点之间的方位角度,α是未知点与控制点之间的角度,L是未知点与控制点之间的距离。
通过以上公式,可以计算出未知点的坐标。
二、后方交会法的应用后方交会法在测量领域中应用广泛,可以用于确定已知控制点的位置以及未知点的坐标。
以下是后方交会法的一些应用场景:1.地形测量在地形测量中,后方交会法可以用于确定山顶、山脚、河流等地形特征点的坐标。
通过测量已知控制点的位置和方位角度,以及未知点与控制点之间的距离和角度,可以计算出未知点的坐标,从而确定地形特征点的位置。
拓普康全站仪后方交会测量操作

养护公司 王玉博
1. 开机,运行TopSURV软件
按[POWER]键,开机,等待片刻,进入如下界面。 该系列全站仪操作系统是,和计算机的 Windows操作系统基本相同,一切可以按照操作 Windows的步骤来进行。
双击桌面上TopSURV图标,打开TopSURV软件:
弹出如下所示的下拉菜单:选 Nhomakorabea[后方交会]菜单项,进入后视定向界面
6. 进行后方交会设置
后方交会测量界面如下图所示:
点击该按钮弹出一下拉菜单,
选中[选项]菜单项,
进入后方交会设置界面,如图所示设置好各个选项, 交会类型:三维; 启用[估算尺度比]选项; 启用[使用计算的比例因子]选项;
点击[确定],重新返回后方交会的主界面。
7.对输入的已知点进行观测
输入第一个已知点的点号,当前棱镜高(RH),并精确 照准该已知点;按[ENT]键,进行角度和距离观测并同时 进行记录。
示例:3号点和4号点是 我们的已知点;这里是 对3号点进行观测。
对下一个已知点,重复步骤7进行观测(按[ENT]键) 。
示例:对4号点进行观测。
8.查看观测结果集并进行后方交会计算
参与后方交会的已知点全部观测完毕以后,点击[观测集] 切换到观测结果列表。
1
查看残差/标准差/比例因子(图 1,2,3),如果观测误差可以 接受,点击[采用]按钮,即进行 后方交会计算。
2
3
9.保存后方交会结果
点击[采用]后,计算结果显示如下:
在主菜单点击[测量],弹出下拉菜单,如下图所示:
点击[后方交会],
输入测站点点号,棱镜高HR和仪器高HI, 点击〔继续〕进入后视定向界面
全站仪边角测量交会法在井巷测量中的应用

247管理及其他M anagement and other全站仪边角测量交会法在井巷测量中的应用赵洪利(锡林郭勒盟山金阿尔哈达矿业有限公司,内蒙古 锡林郭勒 026300)摘 要:在井下巷道测量中,巷道的井下作业环境将会影响测量的效果,目前在已知两点A1、A2之间,如果不能实现“通视”效果,那么传统的测量方法就没有办法精确地衡量井巷巷道的实际距离,如果在无通视的条件下,又要快速地获取未知点的三维坐标,那么就必须要使用全站仪。
文章提出了基于全站仪的边角测量交会法,这种方法在井巷测量应用中非常实用,尤其适用于大规模井巷测量场景,而且可以代替传统的测量方法,能够获得比较精确的三维坐标。
关键词:全站仪;边角测量交会法;井巷测量;创新应用中图分类号:TD175 文献标识码:A 文章编号:11-5004(2020)24-0247-2 收稿日期:2020-12作者简介:赵洪利,男,生于1991年,汉族,河北沧州人,大专,助理工程师,研究方向:矿山测量。
传统的测量方法主要包含有前方交会法和后方交会法,有时在一些特殊的地形地貌下,还可能使用到侧方交会法。
通常情况下,这些测量方法都可以在良好的通视情况下获得可信度更高的测量效果。
但是如果井巷作业环境有所局限,没有办法实现两个已知点之间的通视效果,那么就需要测量人员借助全站仪边角测量交会法,把全站仪安置在指定的待定点上,利用数学三角函数的原理,求解待定点的三维坐标[1]。
1 全站仪边角测量交会法的原理1.1 全站仪边角测量交会法的概念已知第一个测量点和第二个测量点,已经能够构成两个三维坐标的控制点,如果要求解第三个P点的三维待求坐标,那么可以通过在某点水平面上实现投影效果来实现求解效果。
将三维坐标通过P 点实现水平面上的投影效果,在测量点上架设全站仪,并且根据观测架设点和两点之间的距离分别得出数值的角度1β和2β。
此时,全站仪的测量人员可以站在观测点PN1与PN2,分别测量两条线之间的水平夹角,如果将水平夹角设置为r,那么根据两点的已知三维坐标,就可以通过三角函数计算两点之间的距离。
后方交会
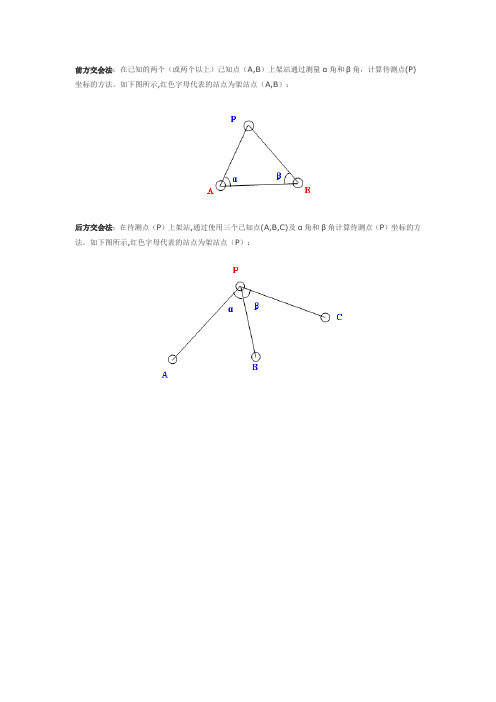
前方交会法:在己知的两个(或两个以上)己知点(A,B)上架站通过测量α角和β角,计算待测点(P)坐标的方法。
如下图所示,红色字母代表的站点为架站点(A,B):后方交会法:在待测点(P)上架站,通过使用三个己知点(A,B,C)及α角和β角计算待测点(P)坐标的方法。
如下图所示,红色字母代表的站点为架站点(P):一、引言在工程测量中,内业资料计算占有很重要的比重,内业资料计算的准确无误与速度直接决定了测量工作是否能够快速、顺利地完成。
而内业资料的计算方法及其所需达到的精度,则又直接取决于外业所用仪器及具体的放样目标和内业计算所用到的办公软件和计算方法。
计算机辅助设计(Computer Aid Design 简写CAD,常称AutoCAD)是20世纪80年代初发展起来的一门新兴技术型应用软件。
如今在各个领域均得到了普遍的应用。
它大大提高了工程技术人员的工作效率。
AutoCAD配合AutoLisp语言,还可以编制一些常用的计算程序,得到计算结果。
AutoCAD的特性提供了测量内业资料计算的另外一种全新直观明了的图形计算方法。
结合我们现正使用的徕卡全站仪的情况,其可以很方便地进行三维坐标的测量,通过AutoCAD的内业计算,①、在放样的过程中,可以用编程计算器结合全站仪,非常方便地、快速地进行作业;②、运用AutoCAD进行计算结果的验证;③、随着全站仪的推广和普及,极坐标的放样越来越成为众多放样方法中备受测量人员青睐的一种,而坐标计算又是极坐标放样中的重点和难点,由于一般的红线放样,工程放样中的元素多为点、直线(段)、圆(弧)等,故可以充分利用AutoCAD的设定坐标系、绘图和取点的功能,以及结合我们外业所用计算器的功能,从而大大减轻我们外业的工作强度及内业的工作量。
以下以冶勒电站厂区枢纽工程的一些实例来说明三者在工程测量中的应用。
二、测区概况冶勒电站厂址位于石棉县李子坪乡南桠村,距坝址11KM,距石棉县城40KM。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
全站仪后方交会标准差算法-回复
全站仪后方交会标准差算法是一种用于测量和校正地形和地形图数据中错误的算法。
本文将详细介绍后方交会的概念、全站仪的基本原理、后方交会标准差算法的步骤和计算方法。
一、后方交会的概念
后方交会是一种测量方法,通过在地面上放置全站仪进行观测,然后根据观测数据和相关的地理位置信息,计算出地面上各个点的坐标位置。
后方交会在土地测量、工程测量、地形图绘制等领域都有广泛的应用。
二、全站仪的基本原理
全站仪是一种精密的测量仪器,通过自动和手动调整观测仪器的参数,利用角度和距离观测测量点的水平和垂直角度以及与仪器的距离。
观测数据经过处理后,可以确定测量点的坐标位置。
全站仪具有快速、精确、全面和高效的特点,广泛应用于各种测量任务中。
三、后方交会标准差算法的步骤
后方交会标准差算法包括以下几个步骤:
1.观测数据采集:使用全站仪对目标点进行观测,记录水平角、垂直角和斜距数据。
观测过程中需要注意仪器的稳定和准确对准。
2.观测数据处理:按照测量次序和观测数据的特点,对观测数据进行处理和整理。
这包括数据的去除、筛选和修正等。
3.观测数据校正:根据已知和控制点的坐标,使用观测数据进行校正。
这个过程中需要使用后方交会标准差算法对数据进行处理。
4.测量点坐标计算:利用已校正的观测数据,结合先前测量的控制点坐标,使用三角法或其他测量计算方法,计算出待测点的坐标位置。
5.检查和调整:对计算得到的测量点坐标进行检查和调整,保证测量结果的准确性和可靠性。
如果发现误差较大或不符合预期要求,需要进行进一步的观测和调整。
四、后方交会标准差算法的计算方法
后方交会标准差算法用于对观测数据进行处理和校正,以提高测量结果的精度。
其计算方法如下:
1.计算观测数据的平均值:对每次观测数据的水平角、垂直角和斜距进行平均,得到平均值。
2.计算观测数据的中误差:对每次观测数据与平均值之差的平方进行求和,并除以总观测次数减1,得到中误差。
3.计算观测数据的方差:观测数据的方差等于中误差的平方。
4.计算观测数据的标准差:观测数据的标准差等于方差的平方根。
标准差越小,表明测量结果越稳定和准确。
通过以上步骤和计算方法,可以对后方交会中的观测数据进行处理和校正,提高测量结果的精度和可靠性。
总结:
本文详细介绍了后方交会的概念、全站仪的基本原理、后方交会标准差算法的步骤和计算方法。
后方交会标准差算法是一种用于纠正地形和地理数据错误的重要方法,具有广泛的应用价值。
通过合理和准确地进行后方交会观测和数据处理,可以提高测量结果的精度和可靠性,为各种地理信息应用提供可靠的支持。