低阶鲁棒解耦控制器设计
控制系统鲁棒性设计
控制系统鲁棒性设计控制系统鲁棒性设计是指在考虑到系统动态特性和不确定因素的情况下,设计出具有良好鲁棒性的控制系统。
鲁棒性设计的目标是使系统能够在不确定因素的干扰下仍然能够保持稳定性和性能。
本文将从鲁棒性设计的概念、重要性以及实现鲁棒性设计的方法三个方面对控制系统鲁棒性设计进行探讨。
一、鲁棒性设计的概念鲁棒性是指系统对于参数变化、外部干扰以及模型不准确性等因素的容忍度。
在控制系统中,不同的干扰和参数变化可能会导致系统动态特性和稳定性发生变化,鲁棒性设计的目标就是保证系统的性能不受这些因素的影响而变差。
二、鲁棒性设计的重要性鲁棒性设计在控制系统中具有重要的意义。
首先,现实世界中的系统往往存在着各种不确定因素,如参数变化、外部干扰等,如果控制系统在面对这些不确定因素时不能保持稳定性和性能,则无法满足实际应用的需求。
其次,控制系统的设计往往是建立在一定的模型假设下进行的,而这些模型存在不准确性,因此需要通过鲁棒性设计来保证系统的稳定性和性能。
最后,鲁棒性设计可以提高系统对于异常情况的响应能力,确保系统在面对未知情况时仍能正常工作。
三、实现鲁棒性设计的方法实现鲁棒性设计的方法主要包括模型不确定性分析、鲁棒控制器设计以及鲁棒性性能评估等。
1. 模型不确定性分析在鲁棒性设计中,模型的不确定性是一个重要的考虑因素。
通过对系统模型的不确定性进行分析,可以了解到系统模型的不确定部分,从而进一步确定鲁棒控制设计中需要关注的方面。
2. 鲁棒控制器设计鲁棒控制器设计是实现鲁棒性设计的关键步骤。
鲁棒控制器的设计需要考虑到系统的不确定性和干扰,通过引入校正项或者使用鲁棒控制策略,可以使得控制系统对于不确定因素的变化具有一定的容忍度,从而保证系统的稳定性和性能。
3. 鲁棒性性能评估鲁棒性性能评估是评价控制系统鲁棒性设计效果的重要手段。
通过对控制系统的鲁棒稳定性和鲁棒性能进行评估,可以判断控制系统对于不确定因素的容忍度以及系统性能的表现。
鲁棒低阶自适应控制器的设计
鲁棒低阶自适应控制器的设计
章海清;林道垣
【期刊名称】《南京航空学院学报》
【年(卷),期】1989(021)004
【摘要】本文提出了一种自适应控制系统设计的新方法,利用该方法设计的自适应控制器具有低阶的控制结构和良好的控制性能,数字仿真结果证明了其有效性。
【总页数】6页(P83-88)
【作者】章海清;林道垣
【作者单位】不详;不详
【正文语种】中文
【中图分类】V249.1
【相关文献】
1.基于鲁棒自适应策略的燃气轮机系统控制器设计 [J], 谭雪琴;苏晓杰
2.基于静态H∞回路成形法的多通道低阶鲁棒阻尼控制器设计 [J], 李志晗;张英敏;张爽;曾雪洋;李兴源
3.四旋翼飞行器鲁棒自适应姿态控制器设计 [J], 堵湘君;曹东;李春涛
4.低阶鲁棒解耦控制器设计 [J], 陈苏平;孙优贤
5.基于鲁棒自适应扰动观测器的船舶航向保持控制器设计 [J], 李纪强;张国庆;尚洪达
因版权原因,仅展示原文概要,查看原文内容请购买。
自动跟踪同期控制系统低阶H∞鲁棒控制器设计

自动跟踪同期控制系统低阶H∞鲁棒控制器设计
卜庆忠;毛剑琴
【期刊名称】《系统工程与电子技术》
【年(卷),期】2003(025)002
【摘要】依据交互投影原理,就低阶H∞鲁棒控制器设计问题提出了一种具体实现算法,进而将其应用于某变频调速电动-发电机组自动跟踪同期控制系统的鲁棒控制器设计.由该算法得到的低阶H∞鲁棒控制器所构成的闭环系统性能与全阶控制器相比无明显差别,特别是主要性能指标,如快速跟踪、无超调及解耦等全与阶控制器基本相同.
【总页数】5页(P202-205,209)
【作者】卜庆忠;毛剑琴
【作者单位】北京航空航天大学第七研究室,北京,100083;北京航空航天大学第七研究室,北京,100083
【正文语种】中文
【中图分类】TP273
【相关文献】
1.自动跟踪同期控制的反标架正规化设计与研究 [J], 刘立生;毛剑琴;杨以涵
2.硬盘电机伺服系统的低阶鲁棒控制器设计 [J], 邓振杰;杨庆新
3.挠性卫星姿态低阶鲁棒控制器设计 [J], 兰维瑶;彭洪;罗林开;陈亚陵
4.自动跟踪同期频域解耦控制系统的设计研究 [J], 刘立生;陈珩
5.磁悬浮飞轮低阶变增益鲁棒控制器设计 [J], 张剀;赵雷;赵鸿宾
因版权原因,仅展示原文概要,查看原文内容请购买。
柔性结构振动系统鲁棒降阶模态控制
浙江大学博士学位论文柔性结构振动系统鲁棒降阶模态控制姓名:***申请学位级别:博士专业:固体力学指导教师:徐博侯;林逸19980701摘要随着空间技术的发展,大型柔性结构振动的主动控制受到国内外学者的日益关注,如何合理设计柔性结构降阶控制器,保证满足鲁捧性、稳定性、合理性能以及可靠性的要求,成为这一研究方向的重点攻关课题。
本文在建模(控制模型的建立)和鲁棒控趔作了一些初步的研究。
1.基于系统的H:性能指标,提出了一种新的控制模态选择方法。
(这种方法是根据系统传递函数矩阵的H2范数,来量化系统振动模态(包括密频模态子系统)在控制设计中的相对重要性,为控制模态的选择提供了定量的依据;而且分析每阶模态对两组输入(模型干扰和控制输入)/输出(调节变量和测量输出)构成的四个传递函数矩阵的H2范数的贡献价值大小,可以定量分析模态的能控性、能观性、可干扰性以及对应A/s设置的控制权与性能指标的匹配性,因此这种模态选择方法全面考虑了激励器(A)/传感器(S)的配置、外界干扰以及性能要求等因素对模态选择的影响。
并用一个数值例子作了说明。
厂2.为了减小H2控制、H。
控制以及混合H2/H。
控制设计的计算量,本文将独立模态空间控制(Ⅱ“SC)设计思想引入这三类控制设计中,这样不但可以大大减小控制设计的计算量,而且有利于在线实时控制。
伯于独立控制每一个模态,防止控制能量流入剩余模态系统,因此IMSC设计可以将溢出现象减小到最低限度。
另外还讨论了IMSC设计的实现问题。
最后用一悬臂梁振动主动控制进行数值仿真加虬说明≯一t,3.从矩阵特征值摄动的角度分析了溢出产生的机理;f将截断的剩余模态视为原全阶模型的一个加性(或乘性)非结构化模型摄动,得到了溢出稳定的充分条件,采用频域加权LQG控制(H:控制)和鲁棒H.控制来设计振动鲁棒控制器,使得得到的闭环控制系统对这一类模型摄动具有鲁棒性,以致能抑制系统的溢出现象。
另外,为克服、H.控制设计中由于将时域性能指标转化为频域性能指标引起的误差以及保守性,j本文提出了一种直接考虑时域性能指标的H。
基于LMI的无人直升机姿态解耦鲁棒控制器设计
基于LMI的无人直升机姿态解耦鲁棒控制器设计
1 引言
目前,随着国民经济的迅速发展,微型无人直升机在越来越多的领域得到应用, 例如在消防、电力线缆巡检、反恐、救灾等场合都已经出现了微型无人直升机的身影[1]。
但是微型无人直升机具有不稳定、强耦合、不确定、易进入涡环状态、操纵功效和抗风能力差的特点,这就导致无人直升机控制难度大,并对飞行控制系统的各种性能均提出严峻考验。
另外,随着进一步的战事和民用的需求, 未来的无人直升机将在极为恶劣的环境下完成复杂的战术和战略使命,并且还需要能够实现精确的自动着陆以及故障状态下的容错、自修复控制等,这些都对无人直升机的飞行控制系统提出了极为苛刻的要求。
采用传统基于PID 的单回路控制器设计方法显然已无法满足高性能无人直升机控制系统的设计要求,因此, 进一步加强对无人直升机的先进飞行控制理论和方法的研究,对促进我国无人直升机先进飞行控制技术发展具有重要理论和现实意义。
本论文旨在对面向无人直升机的先进自主飞行控制算法进行研究,为自动飞行控制器的后续设计工作提供指导。
基于上述现实原因,本论文的研究内容不仅具有显著的理论和现实意义而且是一个前沿的研究领域[2]。
2 无人直升机动力学模型
2.1 操纵力学结构
2.2 动力学模型
将(1)(2)所描述的参数关系分别带入到直升机受力分析模型[3]之中,并忽略所有的二阶小量,即进行线性化后可以得到下列结果:
综合式(3)(4)可以得到直升机定常直线飞行时的9 阶小扰动线化运动方程的标称状态空间表达式:。
鲁棒控制系统设计
鲁棒控制设计报告学院_______________________________ 专业_______________________________ 报告人_____________________________目录1绪论........................................................ 3..1.1控制系统设计背景 ..................................... 3.1.2本文主要工作分配 ..................................... 4. 2一级倒立摆模型建立 ........................................ 5.2.1一级倒立摆的工作原理 ............................... 5.2.2一级倒立摆的数学模型 ............................... 5. 3H诒棒控制器设计............................................ 8.3.1基于Riccati方程的控制 (9)3.2基于LMI的控制 (10)4一级倒立摆系统的仿真 (12)4.1 一级倒立摆控制系统设计 (12)4.2闭环控制系统仿真及分析 (13)5结论...................................................... 1.6精选文库1绪论1.1控制系统设计背景一级倒立摆系统是一个典型非线性多变量不稳定系统,在研究火箭箭身的姿态稳定控制、机器人多自由度运动稳定设计、直升机飞行控制等多种领域中得到了广泛的应用,因此以倒立摆作为被控对象进行控制方法的研究具有重要的现实意义。
为解决一级倒立摆系统的非线性、强耦合、多变量、自然不稳定问题,本文利用H 鲁棒控制实现对一级倒立摆的控制。
基于LMI优化的鲁棒控制器设计

图 1 直线单级倒立摆模型 图
1 . 2 倒 立 摆的 鲁棒数 学模 型
作 者简 介 : 吕申( 1 9 9 0 ) , 男, 黑龙江省鹤 岗人 , 硕士研究 生 , 研究 方 向为 电气工程 。
因为倒立摆具有 高阶次、 非线 性、 不 稳定等特 点 , 因而 可 以 在 平 衡 位 置 附 近 对 其 进 行 近 似 处
小 车和摆 杆组 成 的系 统 。
不等式看做凸优化 问题来对待 , 可 以得到满足凸约 束条件下的一组解 , 由于 M A T L A B集成有 L M I 算法 工 具箱 , 给 求解 控 制 器 带 来 了方 便 。该 文 采 用 L MI
法 优化 求 解 控 制 器 , 结 合 单 级 摆 平 台设 计 了 鲁 棒 H 状态 反馈 控 制器 J , 实 现 了倒立 摆稳 定控 制 。
1 倒 立 摆 数 学 模 型 的建 立
1 . 1 倒 立摆 系统 结构
O
直线 倒 立摆 由沿 光滑 轨 道左 右滑 动 的小 车 及与 小车 用轴 连 接 的摆 杆构 成 , 并 在轴 上 安 装 有 牢 固 的光 电编 码器 , 在 摆杆 滚动 时 用来搜 聚 角度信 号 , 摆
0 引 言
运用 R i c e a t i方 程 方 法 求 解 H 控 制 问 题
杆 可在 与导 轨平 行 的 锤 面 内 自由转 动 , 小 车 经过 伺 服 机构 的传 动在 滑 轨上 面往 返移 动 J , 进 而使 得 摆 杆 的位 置在 滑轨 的一 点处 局 部 不 变 , 且 可 以定 位 于
理, 即s i n O 一0 , c o s 0 —1 , 在 考 虑 小 车 与 导 轨 之 间 的
驱动电机负载模型Hinf(H无穷)鲁棒控制器设计
驱动电机负载模型H8控制器设计一、引言电动机是指能将直流电能转换成机械能的旋转电机。
电动机按使用电源不同分为直流电动机、交流电动机;按照定子和转子的相对速度可分为同步电机、是异步电机。
作为最常用的驱动执行器,它在车辆中应用广泛,如门窗的起降,自动雨刮器,电动汽车驱动,冷却风扇,发动机起动机等等。
目前电机的控制,尤其是直流电机的控制方法,主要以PID控制和LQR 控制为主。
随着汽车性能要求的不断提高,人们越来越关注于系统的稳定性,对于电机的控制也提出了新的要求。
尤其是作为电动汽车的驱动电机,在车辆行驶过程中,特别是高速行驶中,一个微小的摄动可能会对车辆运动产生很大的影响。
在驱动电机工作过程中,由于环境温度变化等工作状况的变动;外部路面干扰;车辆负载突增;老化机械参数变化;建模误差等缘故,会造成模型不精确,也就是模型的不确定性是广泛存在,不可避免的。
因此,需要一种固定的控制器,可以保证模型与实际系统出现偏差时,仍能保持所需的控制品质。
而鲁棒性就是系统的强壮性。
这便引出了使用鲁棒控制来解决电机负载扰动这一问题的讨论。
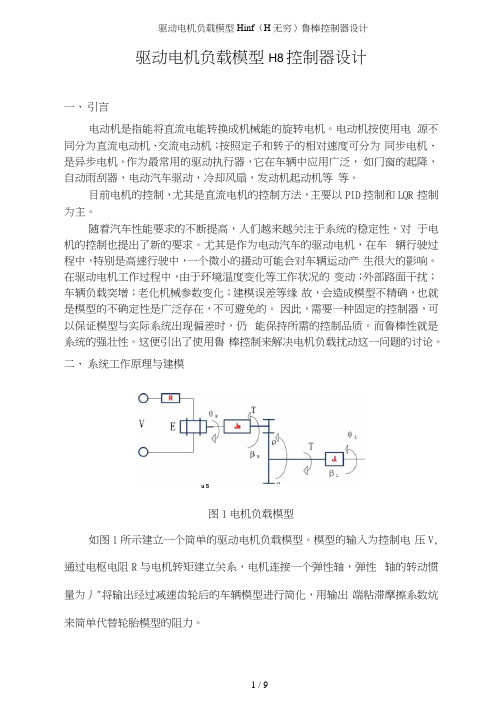
二、系统工作原理与建模u S图1电机负载模型如图1所示建立一个简单的驱动电机负载模型。
模型的输入为控制电压V,通过电枢电阻R与电机转矩建立关系,电机连接一个弹性轴,弹性轴的转动惯量为丿"将输出经过减速齿轮后的车辆模型进行简化,用输出端粘滞摩擦系数炕来简单代替轮胎模型的阻力。
系统参数选取如下:参数参数意义参数值电机输出轴扭转刚度1280. 2陶电机常量10J M电机转动惯量0.5J L负载转动惯量p传动比电机粘滞摩擦系数P L负载粘滞摩擦系数R电枢电阻建立系统的微分方程。
首先,电机扭矩与电流直接相关:M = K T XI其中陌是电机固有参数。
接下来建立驱动电机负载模型的扭矩关系式:X + Kg—+ 仇 X 3L = 0( 1 )J M X =/<T X Z — /?M X O>M + —(——)( 2 )p p设置电机负载系统输入为电压值V,输出为负载转速⑰,建立驱动电机负载模型的状态空间方程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
低阶鲁棒解耦控制器设计的报告,800字
本文旨在介绍一种低阶鲁棒解耦控制器的设计方案。
该控制器使用低阶鲁棒技术、解耦技术以及其它控制技术,为系统提供更可靠的控制性能。
首先,我们需要弄清楚什么是低阶鲁棒控制。
低阶鲁棒控制是一种特定的控制方法,其中系统能够适应预期的抗扰动性能。
它的具体原理是:使用一种可以准确估计系统输出响应的模型来分析系统,然后根据其结果来设计控制系统,从而使系统具备一定的抗扰动性能。
接下来,我们来讨论低阶鲁棒解耦控制器的设计方案。
解耦控制器的基本原理是,通过分析控制的延迟以及控制系统内部状态,构建出一种可以降低或者消除抗扰动性能影响的特定闭环控制技术,进而实现更好的控制效果。
低阶鲁棒解耦控制器设计的具体步骤如下:首先,分析系统的特性,构建一个拥有某些特定系统参数的状态空间模型,然后采用低阶鲁棒控制算法来分析系统的动态行为。
之后,实施低阶鲁棒解耦控制算法,设计出一种可以有效抑制系统的抗扰动性的闭环控制策略,最后实现该设计。
总之,低阶鲁棒解耦控制器是一种有效的控制器设计方案,它综合使用低阶鲁棒技术以及解耦技术,在设计控制器时能够有效地降低传感器和执行器之间的耦合,使系统保持高可靠性。