优化设计-梯度法和共轭梯度法
优化设计梯度法和共轭梯度法
优化设计梯度法和共轭梯度法梯度法和共轭梯度法是常用的数值优化算法,用于求解非线性优化问题。
它们在工程领域中的应用广泛,能够有效解决很多实际问题。
本文将对优化设计梯度法和共轭梯度法进行介绍,并比较它们的优劣。
1. 优化设计梯度法优化设计梯度法是一种通过调整设计变量来最小化给定目标函数的方法。
它基于梯度下降的思想,每一步都会更新设计变量的取值,使得目标函数在设计变量的邻域内最小化。
优化设计梯度法的具体步骤如下:1)初始化设计变量;2)计算目标函数在当前设计变量取值下的梯度;3)根据梯度方向和步长因子更新设计变量;4)重复步骤2和步骤3,直到满足收敛条件。
优化设计梯度法的优点是简单易用,容易实现。
但是它也存在一些问题,比如容易陷入局部最小值,收敛速度慢等。
2. 共轭梯度法共轭梯度法是一种通过迭代算法求解线性方程组的方法,也可以用于非线性优化问题。
它的特点是每一步迭代都要寻找一个新的搜索方向,使得每一次迭代都能够有效利用之前的搜索历史。
共轭梯度法的具体步骤如下:1)初始化设计变量和搜索方向;2)计算目标函数在当前设计变量取值下的梯度;3)根据搜索方向和步长因子更新设计变量;4)计算新的搜索方向,使其与上一次的搜索方向共轭;5)重复步骤2到步骤4,直到满足收敛条件。
共轭梯度法的优点是能够在较少的迭代次数内收敛到最优解,且具有较好的数值稳定性。
然而,共轭梯度法在非精确线搜索时有一定局限性,并且对于非二次凸函数可能陷入非全局最小值。
3. 优化设计梯度法与共轭梯度法的比较在实际应用中,选择合适的优化算法对于问题的解决和效率的提高至关重要。
下面对优化设计梯度法和共轭梯度法进行比较。
(1)收敛速度:在一般情况下,共轭梯度法比优化设计梯度法收敛速度更快。
这是由于共轭梯度法在搜索方向上的选择更加优化。
(2)算法复杂度:优化设计梯度法通常较为简单,易于实现,而共轭梯度法则相对复杂一些,需要额外计算共轭方向。
(3)全局最优解:共轭梯度法在处理非二次凸函数时可能陷入局部最小值,而优化设计梯度法的表现相对较差。
Krylov子空间、优化问题与共轭梯度法
Krylov 子空间、优化问题与共轭梯度法自动化 富晓鹏工程实践中经常需要求解大型线性系统KU=F 。
在很多情况下矩阵K 是非常稀疏的,比如来自偏微分方程的离散化等,此时矩阵中每行仅有较少的非零元素。
面临这样的问题,我们首先面对的问题是,应该采用直接消元法还是迭代方法。
对前者来说,为充分利用系数特性,节点重编号是重要的;而对后者来说,适当的预处理是关键。
本文将重点放在后一类方法中的一种进行介绍与分析,即共轭梯度法。
共轭梯度法适用于矩阵K 为对称阵的情况,算法本身简洁高效,且与一些其他的数学理论、概念相紧密联系,本文分析了共轭梯度法与Krylov 子空间,以及优化问题之间隐含的联系,并简要给出算法框架。
1. 线性方程组迭代解法与Krylov 子空间我们考虑迭代法求解线性方程组Ax=b 。
假定未采用预处理矩阵P ,或P 矩阵已经隐含在A 与b 中。
迭代法求解格式如下:1()k k P x P A x b +⋅=-⋅+ (1)为说明问题,我们考虑简单的迭代格式P=I ,并且x 1=b 。
则迭代的最初几步为:2()2x I A b b b Ab =-+=- (2)232()33x I A x b b Ab A b =-+=-+ (3) …由上面几个式子可得,以上迭代格式第j 步的解x j 是b ,Ab ,…,A j -1b 的线性组合。
当A 矩阵稀疏时,这些向量可以采用矩阵向量乘法的稀疏技巧很快得到。
以上发现自然与Krylov 子空间的概念相联系起来。
Krylov 矩阵: K j = [b Ab A 2b … A j -1b]Krylov 子空间:K j = b ,Ab ,…,A j -1b 的所有线性组合Krylov 命名了向量b ,Ab ,…,A j -1b 的全部线性组合构成的子空间,并认为在这一子空间中,有比上例中特定元素更与线性方程组的解相接近的元素。
共轭梯度法就是在这一子空间中,每一步迭代都依照某种标准寻求最优元素的线性方程组解法。
共轭方向与共轭梯度法-最优化方法

f (X1)T P0 0 ,所以 f (X1)T P0 1P1TQ P0 0
P1TQ P0 0
(1)
以上就是搜索方向P1所必须满足的(必要) 条件。这也是使X2是极小点的充分条件。 P1,P2称为关于Q的共轭方向。
讨论表明 对于二维的具有正定矩阵Q的 二次函数f(X),从任一初始点出发,依次沿关 于Q共轭的两个方向进行一维搜索,必可达到 f(X)的无约束精确极小点。
Pk 1
0
且对j 0,1 , k 2, 有
PjT QPk PjT Q f ( X k ) k1Pk1
PjT Qf
(X
k
)
k
PT
1 j
QPk
1
f ( X k )T QPj
f ( X k )T f ( X j1) f ( X j ) j
f ( X k1 ) QX k1 b Q( X k k Pk ) b (2)
f ( X k1 ) f ( X k ) k QPk
所以
f ( X m ) f ( X m1) m1QPm1
f ( X m2 ) m2QPm2 m1QPm1
其中1 是最优步长,1>0 .因为 X * 是无约束极小点。
故 f ( X * ) 0 即 QX * b 0
f (X1) QX1 b
Q( X * 1P1) b (QX * b) 1QP1 1QP1
又因为 X1是f(X)沿P0方向的直线l0上的极小点,故
设 X En ,
,Q为对称正定矩阵,P0,
P1,···,Pm-1是关于Q共轭的m个共轭方向,
(完整版)机械优化设计习题参考答案孙靖民第四版机械优化设计
2.黄金分割法(0.618法)
原理:提高搜索效率:1)每次只插一个值,利用一个前次的插值;2)每次的缩短率λ相同。左右对称。
程序:p52
(四)插值方法
1.抛物线法
原理:任意插3点:
算得: ; ;
要求:
设函数 用经过3点的抛物线 代替,有
解线代数方程
解得:
程序框图p57
网格法 ,缩小区间,继续搜索。
Monte Carlo方法 , ,随机数。
比较各次得到的 得解
遗传算法(专题)
(二)区间消去法(凸函数)
1.搜索区间的确定:高—低--高( )则区间内有极值。
2.区间消去法原理:在区间[a, b]内插两个点a1, b1保留有极值点区间,消去多余区间。
缩短率:
(三)0.618法
可行方向—约束允许的、函数减小的方向。(图)约束边界的切线与函数等高线的切线方向形成的区域。
数学模型
用内点法或混合法,取 ,
直接方法
(一)随机方向法
1.在可行域产生一个初始点 ,因 (约束),则
--(0,1)的随机数。
2.找k个随机方向,每个方向有n个方向余弦,要产生kn个随机数 , , ,随机方向的单位向量为
3.取一试验步长 ,计算每个方向的最优点
4.找出可行域中的最好点 得搜索方向 。以 为起点, 为搜索方向得 。最优点必须在可行域内或边界上,为此要逐步增加步长。
得
穷举下去得递推公式
3.算例
p73
4.框图p72
5.特点
作业:1. 2.
(六)变尺度法
1.引言
坐标变换
二次函数
令 为尺度变换矩阵
(整理)16梯度法和共轭梯度法基本原理和特点.
16梯度法和共轭梯度法基本原理和特点?梯度法又称最速下降法,基本原理是在迭代点附近采用使目标函数值下降最快的负梯度方向作为搜索方向,求目标函数的极小值,特点;迭代计算简单,只需求一阶偏导数,所占的存储单元少,对初始点的要求不高,在接近极小点位置时收敛速度很慢,共轭的特点为在梯度法靠近极值点收敛速度放慢时,它可以构造共轭方向使其收敛速度加快,迭代计算比较简单,效果好,在每一步迭代过程中都要构造共轭的、方向,比较繁琐。
17迭代终止准则有哪三种?1)当设计变量在相邻两点之间的移动距离充分小时,可用相邻两点的矢量差的模作为终止的判据,2)当相邻两点目标函数值之差达到充分小时,可用两次迭代的目标函数之差作为终止判据。
3)当迭代点逼近极值点时,目标函数在该点的梯度已达到充分小时,可用梯度的模作为终止判据。
18.无约束设计法,1)powell法,它是在下降迭代过运算中只需计算和比较目标函数值的大小,不需计算偏导数的方法,是较好的一种直接搜索算法。
2)梯度法,又称最速下降法,它是采用使目标函数值下降最快的负梯度方向作为搜索方向来求目标函数的极小值。
3)共轭梯度法,又称FR法,是利用目标函数的梯度确定共轭方向,使得计算简便而效果好,只需利用相邻两点的梯度就可以构造一个共轭方向,这种方式产生共轭方向并进行迭代的算法称为共轭梯度法。
4)变尺度法,又称DFP法,为了得到既有快速收敛的性质,又能避免计算二阶导数矩阵及逆矩阵,减少计算工作量。
迭代公式X=X+aS,19有约束设计法?1)复合形法,在可行域中选取k个设计点作为初始复合形的顶点,然后比较复合形个各项目标函数值的大小,其中目标函数值最大的点为坏点,以坏点之外其余各点的中心为映射中心,寻坏点的映射点,以映射点替换坏点,并与原复合型除坏点之外其余各点构成就k 顶点的新的复合型,这样反复迭代直到达到精度找到最优点,2)简约梯度法,用来解决线性约束非线性规划问题。
3)罚函数法,是把一个有约束的问题转化为一系列无约束的问题求解,逐渐逼近最优值。
共轭梯度法详细解读
共轭梯度法详细解读
嘿,朋友们!今天咱就来好好唠唠共轭梯度法。
你想想啊,咱平常解决问题就像走迷宫似的,有时候会在里面转来转去找不到出路,而共轭梯度法呀,就像是在迷宫里给咱指了一条明路!比如说你想找一条最快从山这头到那头的路,共轭梯度法就能帮上大忙啦!
它可不是随随便便就出现的哦,那可是数学家们绞尽脑汁研究出来的宝贝呢!就好比一个超级英雄,专门来打救我们这些在复杂问题里苦苦挣扎的人。
在实际应用里,它可厉害着呢!比如说在工程计算中,要设计一个最完美的结构,共轭梯度法就能迅速算出最优解。
哇塞,这不就相当于有个超厉害的军师在帮咱出谋划策嘛!
你再想想,我们日常生活中很多事情都可以类比成用共轭梯度法来解决问题呀。
比如说你要规划一次旅行,怎么安排路线最合理,不就是在找那个最优的旅行路径嘛,这时候共轭梯度法的思路就能派上用场啦!它就像一个隐藏在幕后的高手,默默地为我们排忧解难。
而且哦,一旦你掌握了它,那种感觉就像是你突然掌握了一种绝世武功,能在各种难题面前游刃有余。
这可太酷了吧!
哎呀呀,共轭梯度法真的是太神奇、太有用啦!大家可一定要好好去了
解它、运用它呀,你绝对会被它的魅力折服的!相信我,没错的!。
共轭梯度法在优化问题中的应用

共轭梯度法在优化问题中的应用共轭梯度法是一种高效的优化算法,在许多优化问题中都得到了广泛的应用。
它是一种迭代方法,用于解决最小化二次函数的优化问题。
在本文中,我将介绍共轭梯度法的原理和算法,并探讨它在优化问题中的应用。
一、共轭梯度法的原理共轭梯度法的核心思想是通过迭代的方式,找到一个与之前迭代步骤方向相互垂直的搜索方向,以加快收敛速度。
在每一次迭代中,共轭梯度法根据当前的搜索方向更新搜索点,直到找到最优解或达到预定的收敛标准。
具体来说,共轭梯度法从一个初始搜索点开始,计算对应的梯度,并沿着负梯度方向进行搜索。
通过一定的方法找到一个与之前搜索方向相互垂直的新搜索方向,并以一定步长更新搜索点。
迭代过程将重复进行,直到满足收敛标准或达到最大迭代次数。
二、共轭梯度法的算法共轭梯度法的算法包括以下几个步骤:1. 初始化搜索点x0和梯度g0,设置迭代次数k=0。
2. 计算当前搜索方向d_k=-g_k(k为当前迭代次数)。
3. 通过一维搜索方法找到最佳步长α_k。
4. 更新搜索点x_k+1 = x_k + α_k * d_k。
5. 计算更新后的梯度g_k+1。
6. 判断是否满足收敛标准,若满足则算法停止,否则转到步骤7。
7. 计算新的搜索方向β_k+1。
8. 将迭代次数k更新为k+1,转到步骤3。
这个算法保证了每一次迭代中的搜索方向都是彼此相互垂直的,从而加快了收敛速度。
三、共轭梯度法的应用共轭梯度法在优化问题中有广泛的应用,特别是在二次规划、线性规划和非线性规划等领域。
在二次规划问题中,共轭梯度法可以高效地求解线性系统Ax=b,其中A是一个对称正定的矩阵。
由于共轭梯度法的特性,它只需要进行n 次迭代,其中n是问题的维度,就能得到精确的解。
这使得共轭梯度法在大规模线性系统求解中具有重要的应用价值。
在线性规划问题中,共轭梯度法可以用于求解带有线性约束的最小二乘问题。
共轭梯度法通过将线性约束转化为一系列的正交子空间,从而在求解最小二乘问题时能够更快地收敛。
最优化梯度法和共轭梯度法
函数的极小点。
以下分析算法的具体步骤。
(1) 任取初始点 x (1),第一个搜索方向取为 d (1) f ( x (1) ) ;
( 2) 设已求得点 x ( k 1) , f ( x ( k 1) ) 0 , g k 1 f ( x ( k 1) ) , 若 令
局部目标函数值下降最快的方向。 最速下降法是线性收敛的算法。
三. 共轭梯度法
1. 共轭方向和共轭方向法
R 定义 设 A 是 n n 的对称正定矩阵,对于 n中的两个非零向量d 1 和 d 2,
若有 d
1T
Ad 2 0 ,则称 d 1和d 2关于A共轭。
设 d 1 , d 2 ,, d k 是 Rn 中一组非零向量,如果 它们两两关于A
以任意的 x (1) R n为初始点,依次沿 d (1) , d ( 2 ) ,, d ( k ) 进行搜索,
得到点 x ( 2) , x ( 3) ,, x ( k 1) , 则 x ( k 1) 是函数 f ( x )在 x (1) Bk 上的
极小点,其中
Bk { x | x i d ( i ) , i R }
i
d ( i ) A g i 1 d
( i )T
T
Ad
(i )
g i 1T A d ( i ) d
( i )T
Ad ( i )
g i 1T A[ ( x ( i 1) x ( i ) ) / i ] d
( i )T
A [ ( x ( i 1) x ( i ) ) / i ]
共轭,即 d i Ad j 0 , i j , i , j 1 , 2 ,, k 。
梯度下降法、牛顿迭代法、共轭梯度法
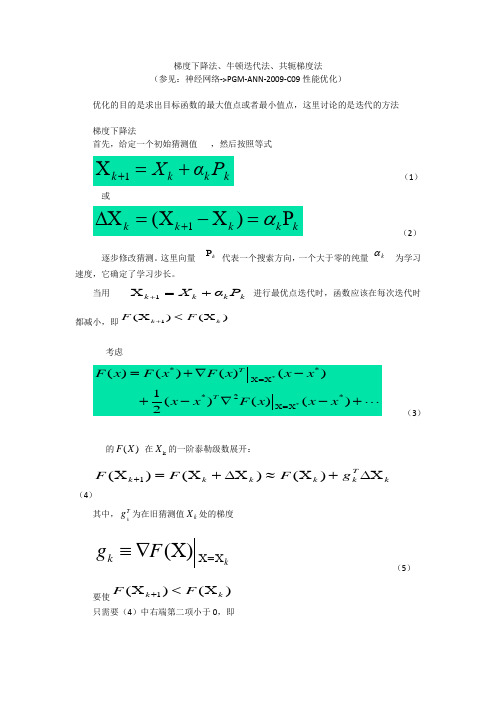
梯度下降法、牛顿迭代法、共轭梯度法(参见:神经网络->PGM-ANN-2009-C09性能优化)优化的目的是求出目标函数的最大值点或者最小值点,这里讨论的是迭代的方法梯度下降法首先,给定一个初始猜测值 ,然后按照等式k k k k ΡαΧ+=X +1 (1)或kk k k k P =X -X =∆X +α)(1 (2)逐步修改猜测。
这里向量 kP 代表一个搜索方向,一个大于零的纯量kα 为学习速度,它确定了学习步长。
当用 k k k k ΡαΧ+=X +1 进行最优点迭代时,函数应该在每次迭代时都减小,即)()(1k k F F X <X +考虑(3)的)(X F 在k X 的一阶泰勒级数展开:kTk k k k k g F F F ∆X +X ≈∆X +X =X +)()()(1(4)其中,Tk g 为在旧猜测值k X 处的梯度kF g k X =X X ∇≡)( (5) 要使)()(1k k F F X <X +只需要(4)中右端第二项小于0,即<P =∆X k T kk k T k g g α (6)选择较小的正数k α。
这就隐含0<k Tk P g 。
满足0<k Tk P g 的任意向量成为一个下降方向。
如果沿着此方向取足够小步长,函数一定递减。
并且,最速下降的情况发生在k T k P g 最小的时候,容易知道,当k k -g P =时k Tk P g 最小,此时,方向向量与梯度方向相反。
在(1)式中,令k k -g P =,则有k k k k g αΧ-=X +1 (7)对于式(7)中学习速率k α的选取通常有两种方法:一种是选择固定的学习速率k α,另一种方法是使基于学习速率k α的性能指数或目标函数)(1k +X F 在每次迭代中最小化,即沿着梯度反方向实现最小化:k k k k g X X α-=+1。
注意:1、对于较小的学习速度最速下降轨迹的路径总是与轮廓线正交,这是因为梯度与轮廓线总是正交的。
优化设计总结最终版
15.参数选择的原则? ①先易后难的原则:先粗后细、精度先低后高,步长先大后小。尤其工程问题,要根据实际 情况判断,合理、适用即可。②参数选择建议通过试算,再确定。 16.表格数据和图像数据的处理? ①数据是根据公式计算值列成表格的, 则找出原计算公式; ②数据是根据实验测试值列成表 格的,数据有变化规律,则找拟合曲线,转化成公式;③无规律可循的数据,用数组处理。 求图线的拟合方程,步骤如下:①先等间隔等分,按曲线等分点取值,得离散数据; ②拟合曲线,确定多项式方程,尚有代定系数;③代入离散数据求方程系数,最后得到拟合 方程的公式。 17.程序运行过程中出现死机情况的分析及处理 可能出现分母近似为零的现象;可能超出函数可行域,计算溢出;可能有矛盾约束; 可能 模型有不合理的情况等等 运行出现 “无限循环” :若设计点来回变化,目标函数值忽大忽小,无规律 ,则属于不 收敛。需要更换算法,或完善数学模型。若计算时间很长,仍未收敛,但目标函数还是在下 降,变化极小,几乎不变。则可能步长太小,或精度太高,需要调整 灵敏度问题:有的参数稍一改变,目标函数值发生很大变化,而有的参数怎么改变,目标函 数几乎不变。运行计算中,有的方向需要作规范化 18.确认最优解? 1、校核和精确性运算:将未列入约束的设计限制条件 ,作校核;试算后的精确性运算:对 初步运算时,未达到的精度或还不很合理的参数,作进一步调整,再次作精确性优化运算。 2、根据工程实际情况,判断确认最优解:3、根据实用性和合理性,判断确认最优解:4、 复核性运算:(变换初始点,作复核性的优化运算;变换参数,再次作复核性的优化运算;变 换算法,再次作复核性的优化运算。) 19.对不合理运行解的处理? ①可能是局部最优解(改变初始点) ;②可能算法运用不当(变化算法的相关参数) ;③可能 算法选择不合适(重新选择算法)④可能数学模型不完全合适(改善、 完善, 甚至重建数学模型)。 三、各种算法逻辑关系 随机方向 直 统 功 协 接 一 效 调 复合形法 解 多目标 目 系 曲 标 数 线 内点惩罚函数 间 函 法 接 数 有约束转化成无约束 外点惩罚函数 解 数 学 混合惩罚函数 解析法 模 单 有约束 型 维 数值迭代 黄金分割 变 量 插值法 单目标 · 坐标 轮 换 无约束 多 维 变 量 共轭 方 向 梯度法 共轭 梯度 牛顿法 变尺度法
最优化方法3-5共轭梯度法和共轭方向法
算法 3.5.1
设目标函数为 f (x) 1 xTGx bT x c,其中G 正定。 2
给定控制误差 。
Step1. 给定初始点 x0及初始下降方向 p0,令k 0。
Step2. 作精确一维搜索,求步长k
f
( xk
k
pk )
min
0
f
( xk
pk
)
Step3. 令 xk1 xk k pk 。
称 Fletcher-Reeves 公式,简称 FR 公式。
k 1
gkT Gpk1 pkT1Gpk 1
Gpk 1
1
k 1
(gk
g
k 1 ) ,
gkT Gpk1
1
k 1
gkT
(gk
g
k 1)
,
pkT1Gpk 1
1
k 1
(g
k1 k2
pk2 )T
(gk
g
k 1)
1
k 1
g
g T
k 1 k
1
(2)Polak-Ribiere-Polyak 公式
故
k 1
g
T k
(
gk
g
k 1)
gkT1gk 1
此式是 Polak 和 Ribiere 以及 Polyak 分别于 1969
年提出的,故称 Polak-Ribiere-Polyak 公式,简称 PRP
0,i
1,2,L
,k
(ii) xk1是二次函数在k 维超平面Hk 上的极小点。
证明 由引理 3.5.2,只需证明(i),
共轭梯度法总结
共轭梯度法(Conjugate Gradient Method)总结1. 引言共轭梯度法是一种用于求解线性方程组或优化问题的迭代算法。
它在大规模问题上具有较高的效率和收敛速度,并且不需要存储完整的矩阵。
共轭梯度法最早由Hestenes和Stiefel于1952年提出,后来经过多次改进和推广,成为求解稀疏线性方程组和优化问题的重要工具。
2. 基本原理共轭梯度法的基本思想是利用共轭方向的性质,通过一系列迭代来逼近最优解。
对于一个对称正定矩阵A和一个向量b,我们希望找到一个向量x使得Ax=b成立。
通过引入残差r=b-Ax,我们可以将问题转化为求解残差最小化的问题。
定义两个向量d和g满足以下关系:d_i^TAd_j=0 (i≠j),则称d_i与d_j是关于矩阵A共轭的。
在每次迭代中,选择与之前所有搜索方向都共轭的搜索方向,并沿着该方向进行搜索。
3. 算法流程步骤1:初始化给定初始解x_0,计算初始残差r_0=b-Ax_0,并令搜索方向d_0等于r_0。
步骤2:迭代重复以下步骤直到满足收敛条件: - 计算当前搜索方向的梯度g_k=Ad_k。
- 计算步长alpha_k=r_k Tr_k/(d_k TAd_k)。
- 更新解x_{k+1}=x_k+alpha_k d_k。
- 更新残差r_{k+1}=r_k-alpha_k Ad_k。
- 计算新的搜索方向d_{k+1}=r_{k+1}+beta_{k+1}d_k,其中beta_{k+1}=r_{k+1}^T r_{k+1}/(r_k^T*r_k)。
步骤3:输出结果返回近似解x。
4. 关键观点和发现共轭梯度法具有以下几个关键观点和发现: - 共轭方向的选择:在每次迭代中,选择与之前所有搜索方向都共轭的搜索方向。
这样可以保证每次迭代都能沿着一个新的、不再相关的搜索方向前进,从而避免了无谓的震荡和重复计算。
- 最优解性质:对于一个n维问题,共轭梯度法最多需要n步就可以达到最优解,即解决了一个n维线性方程组的问题。
共轭梯度法 算法
共轭梯度法算法
共轭梯度法算法是一种优化算法,用于解决大型线性方程组的求解问题。
它的核心思想是在每一步迭代中,将搜索方向沿着前一次迭代的残差与当前梯度的线性组合方向上进行,以达到更快的收敛速度。
共轭梯度法算法可以用于求解矩阵方程 Ax=b,其中 A 是一个对称正定矩阵,b 是一个列向量。
在求解过程中,需要先初始化解向量 x0 和残差向量 r0,然后通过不断迭代更新解向量和残差向量,直到满足一定的收敛条件。
共轭梯度法算法的优点是可以在迭代次数较少的情况下得到较好的解,而且不需要存储大型矩阵,可以节省内存空间。
它常被应用于求解优化问题、信号处理和机器学习等领域。
- 1 -。
共轭梯度法在优化问题中的应用

共轭梯度法在优化问题中的应用
共轭梯度法是一种迭代优化算法,主要应用于解决大规模线性方程组和最小化二次函数的优化问题。
具体应用包括以下几个方面:
1. 线性方程组求解:共轭梯度法可以用于求解大规模线性方程组的解。
对于线性方程 Ax = b,共轭梯度法通过迭代的方式寻找一个最优解x,使得Ax与b之间的误差最小化。
2. 凸优化问题:共轭梯度法可以用于解决凸优化问题,特别是当目标函数为二次函数时。
对于目标函数 f(x) = (1/2)x^TQx - b^Tx + c,其中Q为对称正定矩阵,b为向量,c为常数,共轭梯度法可以通过迭代的方式快速找到最优解。
3. 非线性最小化:共轭梯度法可以用于非线性最小化问题。
通过将非线性最小化问题转化为等价的线性方程组求解问题,然后使用共轭梯度法进行求解。
4. 图像处理:共轭梯度法可以应用于图像处理中的一些问题,如图像恢复、图像去噪、图像平滑等。
通过将图像处理问题转化为优化问题,利用共轭梯度法进行求解。
总之,共轭梯度法在优化问题中的应用非常广泛,特别适用于大规模问题和二次函数优化问题。
它的优点包括收敛速度快、内存消耗低等。
《机械优化设计》习题与答案
《机械优化设计》习题与答案机械优化设计习题及参考答案1-1.简述优化设计问题数学模型的表达形式。
答:优化问题的数学模型是实际优化设计问题的数学抽象。
在明确设计变量、约束条件、⽬标函数之后,优化设计问题就可以表⽰成⼀般数学形式。
求设计变量向量[]12Tn x x x x =L 使 ()min f x →且满⾜约束条件()0(1,2,)k h x k l ==L ()0(1,2,)j g x j m ≤=L2-1.何谓函数的梯度?梯度对优化设计有何意义?答:⼆元函数f(x 1,x 2)在x 0点处的⽅向导数的表达式可以改写成下⾯的形式:??=??+??=??2cos 1cos 212cos 21cos 1θθθθxo x f x f xo x f xo x f xo d fρ令xo Tx f x f x f x fx f ??=????=?21]21[)0(,则称它为函数f (x 1,x 2)在x 0点处的梯度。
(1)梯度⽅向是函数值变化最快⽅向,梯度模是函数变化率的最⼤值。
(2)梯度与切线⽅向d 垂直,从⽽推得梯度⽅向为等值⾯的法线⽅向。
梯度)0(x f ?⽅向为函数变化率最⼤⽅向,也就是最速上升⽅向。
负梯度-)0(x f ?⽅向为函数变化率最⼩⽅向,即最速下降⽅向。
2-2.求⼆元函数f (x 1,x 2)=2x 12+x 22-2x 1+x 2在T x ]0,0[0=处函数变化率最⼤的⽅向和数值。
解:由于函数变化率最⼤的⽅向就是梯度的⽅向,这⾥⽤单位向量p表⽰,函数变化率最⼤和数值时梯度的模)0(x f ?。
求f (x1,x2)在x0点处的梯度⽅向和数值,计算如下:()-=??+-==?120122214210x x x x f x f x f 2221)0(??+ =x f x f x f =5-=??????-=??=5152512)0()0(x f x f p ?2-3.试求⽬标函数()2221212143,x x x x x x f +-=在点X 0=[1,0]T 处的最速下降⽅向,并求沿着该⽅向移动⼀个单位长度后新点的⽬标函数值。
共轭梯度最优化方法

共轭梯度最优化方法
共轭梯度法呢,它主要是用来解决最优化问题的。
想象一下,你在一个超级复杂的迷宫里找宝藏,这个宝藏就是那个最优解。
普通的方法可能就像没头苍蝇乱撞,但是共轭梯度法就像是有个小机灵鬼在给你指路。
它有个很厉害的地方,就是利用了之前搜索的信息。
就好比你前面走过的路不是白走的,它会根据之前的经验来决定下一步往哪走。
比如说,你第一次往左边走了一段,发现不太对,那这个方法就会把这个信息记下来,下一次就不会再傻乎乎地一直往左边走啦。
在数学上呢,它是基于一些向量之间的特殊关系,也就是共轭关系。
这就像是一群小伙伴,他们之间有着某种默契,互相配合来找到那个最优解。
共轭梯度法的优点可不少呢。
它比一些传统的最优化方法要快很多。
就像跑步比赛,别人还在慢悠悠地起步,它已经像小火箭一样冲出去了。
而且,它不需要太多的存储空间,就像一个很会整理东西的小能手,不会把空间弄得乱七八糟。
不过呢,它也不是完美无缺的。
有时候在一些特别复杂的情况下,它可能也会有点小迷糊。
但是总体来说,在很多领域都超级有用。
还有在机器学习里,要调整那些复杂的模型参数,让模型预测得更准。
共轭梯度法也能来帮忙,它就像一个小导师,告诉那些参数应该怎么调整才能让整个模型变得更优秀。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
令 ( ) 8 ( 2 4 ) 36 ( 1 6 ) 0 1
13 62
36 8 T x x 1d ( , ) 31 31
2 1 1
最速下降法的程序流程图
锯齿现象
在极小点附近,目标函 数可以用二次函数近似 ,其等值面近似
椭球面。
x2 x3
(1) d
( i )T
Ad ( j ) 0 , j 1 , 2 ,, i 1;
(2) gi T g j 0 , j 1 , 2 ,, i 1;
( 3) g iT d ( i ) g iT g i 。
注 (1)由定理3 可知搜索方向d (1) , d ( 2) ,, d ( m ) 是 A 共轭的。
基本思想: 将共轭性和最速下降方 向相结合,利用已知迭 代点
处的梯度方向构造一组 共轭方向,并沿此方向 进行搜索,求出
函数的极小点。
以下分析算法的具体步骤。
(1) 任取初始点 x (1),第一个搜索方向取为d (1) f ( x (1) ) ;
( 2) 设已求得点 x ( k 1) , 若f ( x ( k 1) ) 0 , 令 g k 1 f ( x ( k 1) ) ,
d
( k )T
Agk 1 k d
( 2)
( k )T
A d (k )
解得 k
d ( k ) A g k 1 d
( k )T
T
Ad
(k )
( 3) 搜索步长的确定 :
已知迭代点x ( k )和搜索方向d ( k ) , 利用一维搜索确定最优 步长 k ,
即求解 min
d ( 2 ) g 2 1 d ( 1)
8 16 T 4 ( , ) ( 8 , 4 )T 9 9 81 40 ( 1 , 4 )T 81
2
T ( 2) g2 d
d
( 2 )T
Ad ( 2 )
40 8 16 1 ( , ) 81 9 9 4 9 20 4 0 1 40 2 ( ) (1, 4 ) 4 81 0 2
令 g k f ( x ( k ) ) Ax ( k ) b,则有 [ g k Ad ( k ) ]T d ( k ) 0,
解得 k
T (k ) gk d
d
( k )T
Ad
(k )
( 3)
定理 3 对于正定二次函数 f ( x )
1 T x Ax bT x c , FR算法在 m n次 2 一维搜索后即终止,并 且对所有的 ( i 1 i m ),下列关系成立
f ( x ) ( 4 x1 , 2 x 2 )T .
第 1 次迭代:
令
d (1) g1 ( 8 , 4 )T ,
而
1
T (1 ) g1 d
8 (8,4) 4 4 0 8 ( 8, 4) 0 2 4
x ( 3) x ( 2) 2 d ( 2)
(
2 8 T 9 40 , ) ( 1 , 4 )T 9 9 20 81
( 0 , 0 )T
g 3 ( 0 , 0 )T
x ( 3)即为所求极小点。
则下一个搜索方向d ( k 1)按如下方式确定 :
令 d ( k 1) g k 1 k d ( k ) (1)
如何确定 k?
要求 d ( k 1) 和 d ( k ) 关于 A共轭。
则在( 1)式两边同时左乘d ( k ) A ,得
0d
( k )T
T
Ad
( k 1)
1. 任取初始点x (1) , 精度要求 ,令 k 1。
2. 令g1 f ( x (1) ) , 若 || g1 || , 停止, x (1)为所求极小点; 否则,令d (1) g1 , 利用公式( 3)计算1 , 令x ( 2) x (1) 1 d (1)。 x ( k 1)为所求极小点; 3. 令g k 1 f ( x ( k 1) ) , 若 || g k 1 || , 停止, 否则,令d ( k 1) g k 1 k d ( k ) , 其中 k 用公式( 4)计算。
T
g i f ( x ( i ) ) A x ( i ) b .
i
g i 1T ( g i 1 g i ) d
( i )T
( g i 1 g i )
2
|| g i 1 ||2 d
( i )T
gi
|| g i 1 ||2 || g i ||
( 4)
FR算法步骤:
f ( x ( k ) d ( k ) ) 。
记 令 即有
( ) f ( x ( k ) d ( k ) ) ,
( ) f ( x ( k ) d ( k ) )T d ( k ) 0,
[ A ( x ( k ) d ( k ) ) b ]T d ( k ) 0,
( 2) 算法中第一个搜索方向 必须取负梯度方向,否 则构造的搜索 方向不能保证共轭性。
T (i ) T 2 ( 3) 由定理 3的(3)可知, g i d g i g i || g i || 0 ,
所以d ( i )是迭代点x ( i ) 处的下降方向。
(4) 由定理3 , FR算法中 i的计算公式可以简化。
i
d ( i ) A g i 1 d
( i )T
T
( i ) d
( i )T
Ad ( i )
g i 1T A[ ( x ( i 1) x ( i ) ) / i ] d ( i ) A [ ( x ( i 1) x ( i ) ) / i ]
令 k : k 1。
4. 利用公式( 3)计算 k ,令 x ( k 1) x ( k ) k d ( k ) , 转3。
例 用FR 算法求解下述问题:
min
2 2 f ( x ) 2 x1 x2
初始点取为x (1) ( 2 , 2 )T 。
解:
4 0 4 0 x1 1 . , A f ( x ) ( x1 , x 2 ) 2 0 2 0 2 x 2
d 1 f ( x 1 ) ( 4 , 6 )T . x 1 d 1 ( 2 4 , 1 6 )T . 令 ( ) f ( x 1 d 1 ) ( 2 4 ) 2 3 ( 1 6 ) 2 ,
求解
min ( )
4. 令 x k 1 x k k d k , 令 k : k 1 , 转2。
2 2 例. 用最速下降法求解: min f ( x ) x1 3 x2 , 设初始点为x1 ( 2 ,1 )T ,
求迭代一次后的迭代点 x 2 。
解: f ( x ) ( 2 x1 , 6 x2 )T ,
梯度法和共轭梯度法
1. 无约束最优化问题 2. 梯度法 3. 共轭梯度法
一. 无约束最优化问题
无约束最优化问题 min
f ( x) x Rn
s .t .
其中f ( x ) 有一阶连续偏导数。
解析方法:利用函数的解析性质构造迭代公式使之收敛到最优解。
二. 梯度法(最速下降法) 迭代公式:
x k 1 x k k d k
如何选择下降最快的方向?
f ( x k ) 函数值增加最快的方向
xk
函数值下降的方向
f ( x k ) 函数值下降最快的方向
梯度法(最速下降法):
1. 搜索方向: d k f ( x k ) , 也称为最速下降方向;
2. 搜索步长 : k 取最优步长, 即满足 f ( x k k d k ) min f ( x k d k ) 。
x*
x1
注
最速下降方向反映了目 标函数的一种局部性质 。 它只是
局部目标函数值下降最 快的方向。 最速下降法是线性收敛 的算法。
三. 共轭梯度法
共轭梯度法
Fletcher R eeves 共轭梯度法 : 1 min f ( x ) x T Ax bT x c 2 其中 x R n , A是对称正定矩阵, b R n, c 是常数。
d
(1 ) T
Ad (1)
5 18
所以 x ( 2) x (1) 1 d (1)
( 2 , 2 )T
5 2 8 T ( 8 , 4 )T ( , ) 18 9 9
第 2次迭代: 8 16 g 2 ( , )T . 9 9 8 2 16 2 ( ) ( ) 2 || g 2 || 9 9 4 . 1 81 || g1 ||2 82 42
梯度法算法步骤:
1. 给定初始点 x 1 R n , 允许误差 0 , 令k 1 。 2. 计算搜索方向 d k f ( x k ) ;
3. 若 || d k || , 则停止计算, 否则,求最优步长k x k 为所求极值点;
使得 f ( x k k d k ) min f ( x k d k )。