FANUC-伺服维修
FANUCαi系列进给伺服驱动系统典型故障诊断与维修

第 8卷 第 2期
20 0 8年 6月
南 京 工 业 职 业 技 术 学 院 学 报
Junl f aj gIst eo I ut eh ooy ora o N ni ntu f n syT c nl n it d r g
的任务就是要完 成各 坐标轴 运 动的 位置控 制 及速 度控 制。 数控 机 床 进 给 伺 服 系统 的组 成 框 图 如 图 l 示 , 是 一 个 双 所 它 闭 环 系统 , 环是 速 度 环 , 环 是 位 置环 。 内 外
础 上 作 了性 能 改 进 。 产 品通 过 特 殊 的磁 路 设 计 与 精 密 的 电
伺 服 系统 是 数 控 机 床 的 主要 部 分 , 一 台数 控 机 床 中一 在 般 有 多 套 。 由于 它 和 机 械部 分 有 联 接 , 以 出现 故 障 的 机 会 所
1 F UC o AN q系列进 给 伺 服 驱 动装 置 的控 制 原 理 与 连接
1 1 控 制原 理 .
制 系统 。 1 2 F U q系 列进 给 伺 服驱 动 装 置 的 连接 . AN C o 系 列 伺 服 模 块 连 接 图 如 图 2所 示 。x 轴 模 块 上 P N 、
到位置控制指令 , 同时 , 置检测装 置将实 际位 置检测信 号 位
反馈 给数 控 系 统 , 成 全 闭环 或 半 闭 环 的 位 置 控 制 。经 位 置 构 比较后 , 数控 系 统 输 出 速 度 控 制 指 令 至 各 坐 标 轴 的 驱 动 装 置 , 速 度控 制 单 元 驱 动 伺 服 电 动 机 , 动 滚 珠 丝 杠 传 动 进 经 带 行 进 给运 动 , 成 位 置 环 控制 。伺 服 电 动 机 上 的 测 速 装 置 将 完 电 动机 转 速 信 号 与速 度 控 制 指 令 比较 , 成 速 度 环 控 制 。 因 构
FANUC伺服报警与故障处理
Pulse error (separate)
分离型编码器脉冲错误
3.3.7(2)
384
Soft phase alarm (separate)
相位错误
3.3.7(2)
385
Serial data error (separate)
分离型编码器串行数据错误
3.3.7(3)
386
Data transfer error (separate)
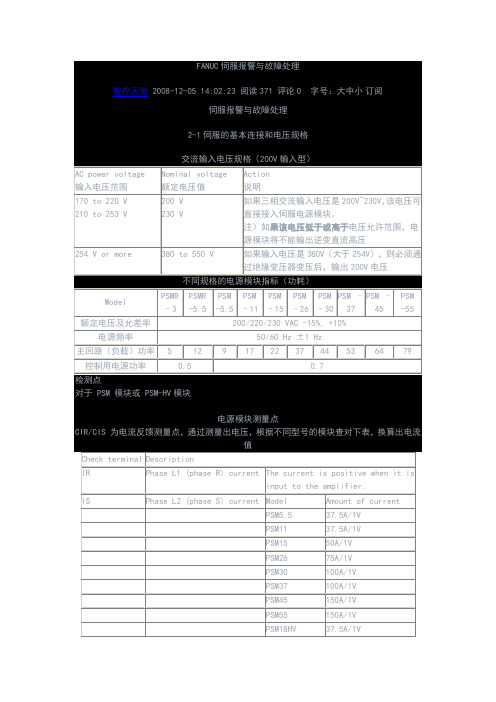
200 V
230 V
如果三相交流输入电压是200V~230V,该电压可直接接入伺服电源模块。
注)如果该电压低于或高于电压允许范围,电源模块将不能输出逆变直流高压
254 V or more
380 to 550 V
如果输入电压是380V(大于254V),则必须通过绝缘变压器变压后,输出200V电压
不同规格的电源模块指标(功耗)
驱动器 控制电压欠电压
3.2
435
5
Inverter: DC link undervoltage
驱动器直流环欠电压
3.2
436
Soft thermal (OVC)
软过热(过电流)
3.3.3
437
01
Converter: input circuit overcurrent
逆变器输入回路过电流
3.1
438
53
64
79
控制用电源功率
0.5
0.7
检测点
对于 PSM 模块或 PSM-HV模块
电源模块测量点
CIR/CIS 为电流反馈测量点,通过测量出电压,根据不同型号的模块查对下表,换算出电流值
Check terminal
FANUC主轴直流伺服印刷电路板元件级修理
常麻烦的 , 设备时好时坏 , 故障不能确定何时出现 , 出
现 了也是 瞬 间发生 即 产生 报 警 , 难 准确 捕 获 相 关信 很 息 。20 年 3 月 初 笔 者 就 遇 到 一 个 维 修 实 例 : 03 X 75 K 1F数控 铣 床 , 近 一 年 内 , 轴 时 常 故 障报 警 , 在 主 开 初是偶 发 , 主轴 伺服板 上 的复位键 可 以清除 , 以 按 可 勉 强在粗 加工 中工作 , 但后 来越 来越频 繁 , 虽经 过多次
(ntueo ahn r M n fc r T cn l y hn cd m f nier gP yi , ay n 2 0 H Istt fM ciey a uat e eh oo ,C iaA a e yo g e n h s s Mi a g 0 ,C N) i u g E n i c n 61 9
K y o d :C C M ln a hn ; CS roD i n ytm fr p de It rt C ( r tdCrut or ) e w r s N iigM c ie D ev r igSs i l; ne ae P B Pi e i i B ad ; l v e o Sn g d n c
者 接受维修 任务 后 , 采用正 确 的方法 , 6个 工作 日内 在 迅 速查 明故 障原 因 , 底 解决 问题 。下 面是 笔 者维 修 彻
和 判断过程 的介 绍 。
速确认 故 障范 围 : 把该 印 刷 电路 板 与 其 它 同类 型机 床 同型号 主轴控 制 印刷 电路板互 换 , 发现故 障转 移 , 故 而 障机床 换板后 , 复正常 。于是可 以排 除主轴 电动 机 、 恢 机 械等 方 面的原 因 , 确定 为 主轴控 制 电路 板故 障 。 () 2 利用测 量端 子 的常规检 查 结合 表 1所 列 信 息 , 先 检 查 保 险 以及 C 2~ 首 H C 6端子 + +2 ±1 电源 , 有 发现 异 常 ; H 5V、 4V、 5V 没
FANUC0i系列伺服系统故障的诊断与维修

器。
第 二,机床 回参考点 , 但是每 次回到 的参考点的位置都不~样, 也就是 所说的绝对零点丢失。而绝对零点丢失一般都是因为基于 以 下几个 原因:首先,绝对位置编码 器的后备 电池 存在掉电情况;其 次,更 换了伺服放大器;再者 ,更换 了编码器或者是伺服 电机 。为 了判 断是以上的哪个 原因导致 出现 了绝对零点丢失的情况 ,首先就
机 、 自动控 制、精 密机械 、检测等 高新的技术 。随 着数控技 术的不 断发展 ,数 控机床的应用领域也越来越广泛 ,同时伴 随着的 系统故 障也 多样化 复杂化 。 本文就伺服 系统进行 介绍 , 然后针对 F A NUC 0 i
系 列伺 服 系统 故 障进 行 了主要 研 究 。
机械与设备
F A N U C 0 i 系列伺服系统故障的诊断与维修
刘学峰
( 中航工业南方航空工业 ( 集团 ) 有限公司 ,湖南 株 洲 4 1 2 0 0 2)
【 摘 要】 数控机床是典型 的机 电一体化设备 ,它综合 了计算
现 象进行分析 ,并给 出维修方法 。 第一 ,机床不 能回参考 点。所 谓的机 床不能够 回参 考点,就是 说手动 回零 的时候 ,机床不会 减速 ,而且会 出现 超程报 警的现 象, 又或者在采取手动 回零 时,机床会减速 ,但 是减速 以后 并没有 让轴 停止运动 ,最终 导致 出现 9 0 # 报警 。根据 增量回零条件 原理可 知, 出现上述 的现 象的原因可能为减速 开关进油或者是进水,又或者输
否有变化 。如果没有漂移 ,只是位置显示有偏差 ,则检查工件坐标 偏置是否有效;若机械 位置 偏移,则 绝对脉冲编码器故障 。 第三 ,在手动方式 下,机床不能运行 。这个故 障的原 因是显示
FANUC伺服驱动器故障
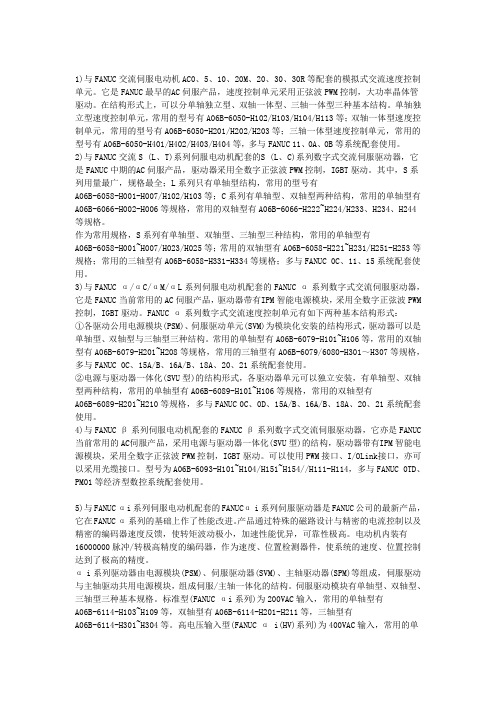
1)与FANUC交流伺服电动机AC0、5、10、20M、20、30、30R等配套的模拟式交流速度控制单元。
它是FANUC最早的AC伺服产品,速度控制单元采用正弦波PWM控制,大功率晶体管驱动。
在结构形式上,可以分单轴独立型、双轴一体型、三轴一体型三种基本结构。
单轴独立型速度控制单元,常用的型号有A06B-6050-H102/H103/H104/H113等;双轴一体型速度控制单元,常用的型号有A06B-6050-H201/H202/H203等;三轴一体型速度控制单元,常用的型号有A06B-6050-H401/H402/H403/H404等,多与FANUC 11、0A、0B等系统配套使用。
2)与FANUC交流S (L、T)系列伺服电动机配套的S (L、C)系列数字式交流伺服驱动器,它是FANUC中期的AC伺服产品,驱动器采用全数字正弦波PWM控制,IGBT驱动。
其中,S系列用量最广,规格最全;L系列只有单轴型结构,常用的型号有A06B-6058-H001-H007/H102/H103等;C系列有单轴型、双轴型两种结构,常用的单轴型有A06B-6066-H002-H006等规格,常用的双轴型有A06B-6066-H222~H224/H233、H234、H244等规格。
作为常用规格,S系列有单轴型、双轴型、三轴型三种结构,常用的单轴型有A06B-6058-H001~H007/H023/H025等;常用的双轴型有A06B-6058-H221~H231/H251-H253等规格;常用的三轴型有A06B-6058-H331-H334等规格;多与FANUC 0C、11、15系统配套使用。
3)与FANU C α/αC/αM/αL系列伺服电动机配套的FAN UC α系列数字式交流伺服驱动器,它是FANUC当前常用的AC伺服产品,驱动器带有IPM智能电源模块,采用全数字正弦波PWM 控制,IGBT驱动。
FANUC α系列数字式交流速度控制单元有如下两种基本结构形式:①各驱动公用电源模块(PSM)、伺服驱动单元(SVM)为模块化安装的结构形式,驱动器可以是单轴型、双轴型与三轴型三种结构。
发那科fanuc维修手册 内部资料
式中伺服电机 转输入脉冲数的设定是可 改变 (例)HC-KFE系列 令0000 pulse/rev的场合 如果设定值是0,可根据连接的伺服电机的 辨率自动的设定这个参数 初始值 令 设定范围 0 令~65535 AL.3以 过流 伺服放大器的输出电流超过了允许电流 < 要原因> <处理方法> ?伺服放大器输出侧②?三?上相存在短路 → 确接线 ?伺服放大器输出侧②?三?上相接地 → 确接线 ?由于外来噪声的干扰,过流检测电路出 错误 →实施抗干扰处理 ?伺服放大器晶体管(IPM)故障 →更换伺服放大器 AL.33 过压 直流母线电压的输入在400三 < 要原因> <处理方法> ?内置的再生 动电阻或再生 动选件的接线断路或接触 良 →更换电线 → 确接线
?伺服放大器和伺服电机之间的配合有误 →使用 确的配合
?参数No.0选择的伺服电机 当前使用的伺服放大器 匹配 → 确设定参数No.0
AL.以0 编码器异常以
编码器和伺服放大器之间通 异常
< 要原因> <处理方法>
?编码器接头CN以没有连接好 → 确接线
?编码器电缆故障(断路或短路) →修理或更换电缆
?伺服放大器内部故障 →更换伺服放大器
AL.以0 编码器异常以
编码器和伺服放大器之间通 异常
< 要原因> <处理方法>
?编码器接头CN以没有连接好 → 确接线
?编码器电缆故障(断路或短路) →修理或更换电缆
?编码器故障 →更换伺服电机
AL.令A 电机配合异常
伺服放大器和伺服电机之间配合有误
< 要原因> <处理方法>
新建文本文档.txt
菱伺服放大器内部故障处理方法
FANUC常见伺服报警及解决方法
FANUC常见伺服报警及解决方法SV0301:APC报警:通信错误1、检查反馈线,是否存在接触不良情况。
更换反馈线;2、检查伺服驱动器控制侧板,更换控制侧板;3、更换脉冲编码器。
SV0306:APC报警:溢出报警1、确认参数No.2084、No.2085是否正常;2、更换脉冲编码器。
SV0307:APC报警:轴移动超差报警1、检查反馈线是否正常;2、更换反馈线。
SV0360:脉冲编码器代码检查和错误(内装)1、检查脉冲编码器是否正常;2、更换脉冲编码器。
SV0364:软相位报警(内装)1、检查脉冲编码器是否正常;2、更换脉冲编码器。
3、检查是否有干扰,确认反馈线屏蔽是否良好。
SV0366:脉冲丢失(内装)报警1、检查反馈线屏蔽是否良好,是否有干扰;2、更换脉冲编码器。
SV0367:计数丢失(内装)报警1、检查反馈线屏蔽是否良好,是否有干扰;3、更换脉冲编码器。
SV0368:串行数据错误(内装)报警1、检查反馈线屏蔽是否良好;2、更换反馈线;3、更换脉冲编码器。
SV0369:串行数据传送错误(内装)报警1、检查反馈线屏蔽是否良好,是否有干扰源;2、更换反馈线;3、更换脉冲编码器。
SV0380:分离型检查器LED异常(外置)报警1、检查分离型接口单元SDU是否正常上电;2、更换分离型接口单元SDU。
SV0385:串行数据错误(外置)报警1、检查分离型接口单元SDU是否正常;2、检查光栅至SDU之间的反馈线;3、检查光栅尺。
SV0386:数据传送错误(外置)1、检查分离型接口单元SDU是否正常;2、检查光栅至SDU之间的反馈线;3、检查光栅尺。
SV0401:伺服准备就绪信号断开1、查看诊断No.358,根据No.358的内容转换成二进制数值,进一步确认401报警的故障点。
2、检查MCC回路;3、检查EMG急停回路;4、检查驱动器之间的信号电缆接插是否正常;5、更电源单元。
同步控制中SV0407:误差过大报警1、检查同步控制位置偏差值;2、检查同步控制是否正常。
fanuc伺服报警的故障诊断及实际处理方法

JV1B/JV2B
14 15 B
JS1B/JS2B
16 17 B
JF1/JF2
长春汽车工业高等专科学校
FANUC α
(4 )
长春汽车工业高等专科学校
FANUC α
(4 )
长春汽车工业高等专科学校
2.FANUC
CX4
相荡度滚 相荡影滚 溢 相而度滚 相而影滚 滚
相环度 相环影 滚
控荡 立点点
长春汽车工业高等专科学校
SSCK—20
长春汽车工业高等专科学校
2.FANUC βi
长春汽车工业高等专科学校
βi
Oi MateTB
长春汽车工业高等专科学校
VOFS(#7):
0:
1:
2077:0—32767 32000
10 10
长春汽车工业高等专科学校
ALM1
#7 OVL #6 LV #5 OVC #4 HCA #3 HVA #2 DCA #1 FBA #0 OFA
:
FANUC-OiA/OiB/OiC
:
长春汽车工业高等专科学校
长春汽车工业高等专科学校
长春汽车工业高等专科学校
3.
长春汽车工业高等专科学校
FANUC
长春汽车工业高等专科学校
3
3.1 FANUC
度实
度
长春汽车工业高等专科学校
影
: 1μm 0.5μm 0.1μm
长春汽车工业高等专科学校
2.FANUC
α
SVU
β
βi
α
SVM
FANUC系统常见报警中文对照及解决方法
FANUC系统常见报警中文对照及解决方法1.AL-01:伺服报警尘埃这个报警表示伺服电机遇到了尘埃问题。
解决方法是清洁伺服电机,并确保其周围环境清洁。
2.AL-02:伺服报警过载这个报警表示伺服电机遇到过载问题。
解决方法是检查伺服电机和相关设备的负载情况,确保其在正常范围内。
3.AL-03:伺服报警过温这个报警表示伺服电机遇到过温问题。
解决方法是检查散热装置是否正常工作,安装风扇或增加散热片等,并减少伺服电机的负载。
4.AL-04:伺服报警驱动断开这个报警表示伺服电机的驱动断开。
解决方法是检查伺服电机的连接线路是否正常,确保电缆连接牢固。
5.AL-05:伺服报警电源断开这个报警表示伺服电机的电源断开。
解决方法是检查伺服电机的电源线路是否正常,确保电源连接牢固。
6.AL-06:伺服报警过流这个报警表示伺服电机遇到过流问题。
解决方法是检查伺服电机和相关设备的电流情况,确保其在正常范围内。
7.AL-07:伺服报警过压这个报警表示伺服电机遇到过压问题。
解决方法是检查伺服电机和相关设备的电压情况,确保其在正常范围内。
8.AL-08:伺服报警欠压这个报警表示伺服电机遇到欠压问题。
解决方法是检查伺服电机和相关设备的电压情况,确保其在正常范围内。
9.AL-09:伺服报警过热这个报警表示伺服电机遇到过热问题。
解决方法是检查散热装置是否正常工作,安装风扇或增加散热片等,并减少伺服电机的负载。
10.AL-10:伺服报警驱动电流异常这个报警表示伺服电机驱动电流异常。
解决方法是检查伺服电机的驱动器和电缆连接是否正常,并确保电缆连接牢固。
发那克(FANUC)故障与维修经验总结
发那克(FANUC)故障与维修经验总结发那克(FANUC)故障与维修经验总结cnc,电脑锣数控机床的故障分析:数控机床的应用越来越广泛,其加工柔性好,精度高,生产效率高,具有很多的优点。
但由于技术越来越先进、复杂,对维修人员的素质要求很高,要求他们具有较深的专业知识和丰富的维修经验,在数控机床出现故障才能及时排除。
我公司有几十台数控设备,数控系统有多种类型,几年来这些设备出现一些故障,通过对这些故障的分析和处理,我们取得了一定的经验。
下面结合一些典型的实例,对数控机床的故障进行系统分析,以供参考。
一、NC系统故障1.硬件故障有时由于NC系统出现硬件的损坏,使机床停机。
对于这类故障的诊断,首先必须了解该数控系统的工作原理及各线路板的功能,然后根据故障现象进行分析,在有条件的情况下利用交换法准确定位故障点。
例一、一台采用德国西门子SINUMERIK SYSTEM3的数控机床,其PLC采用S5─130W/B,一次发生故障,通过NC 系统PC功能输入的R参数,在加工中不起作用,不能更改加工程序中R参数的数值。
通过对NC系统工作原理及故障现象的分析,我们认为PLC的主板有问题,与另一台机床的主板对换后,进一步确定为PLC主板的问题。
经专业厂家维修,故障被排除。
例二、另一台机床也是采用SINUMERIK SYSTEM3数控系统,其加工程序程序号输入不进去,自动加工无法进行。
经确认为NC系统存储器板出现问题,维修后,故障消除。
例三、一台采用德国HEIDENHAIN公司TNC155的数控铣床,一次发生故障,工作时系统经常死机,停电时经常丢失机床参数和程序。
经检查发现NC系统主板弯曲变形,经校直固定后,系统恢复正常,再也没有出现类似故障。
2.软故障数控机床有些故障是由于NC系统机床参数引起的,有时因设置不当,有时因意外使参数发生变化或混乱,这类故障只要调整好参数,就会自然消失。
还有些故障由于偶然原因使NC系统处于死循环状态,这类故障有时必须采取强行启动的方法恢复系统的使用。
FANUC交流伺服驱动系统故障维修举例

FANUC交流伺服驱动系统故障维修举例例244~245.加工过程中出现过热报警的故障维修例244.故障现象:某配套FANUC 0T MATE系统的数控车床,在加工过程中,经常出现伺服电动机过热报警。
分析与处理过程:本机床伺服驱动器采用的是FANUC S系列伺服驱动器,当报警时,触摸伺服电动机温度在正常的范围,实际电动机无过熟现象。
所以引起故障的原因应是伺服驱动器的温度检测电路故障或是过热检测热敏电阻的不良。
通过短接伺服电动机的过热检测热敏电阻触点,再次开机进行加工试验,经长时间运行,故障消失,证明电动机过热是由于过热检测热敏电阻不良引起的,在无替换元件的条件下,可以暂时将其触点短接,使其系统正常工作。
例245.故障现象:某配套FANUC 0T MATE系统的数控车床,在加工过程中,经常出现X轴伺服电动机过热报警。
分析与处理过程:故障分析过程同上例,经检查X轴伺服电动机外表温度过高,事实上存在过热现象。
测量伺服电动机空载工作电流,发现其值超过了正常的范围。
测量各电枢绕组的电阻,发现A相对地局部短路;拆开电动机检查发现,由于电动机的防护不当,在加工时冷却液进入了电动机,使电动机绕阻对地短路。
修理电动机后,机床恢复正常。
例246.驱动器出现OVC报警的故障维修故障现象:某配套FANUC 0T-C系统、采用FANUC S系列伺服驱动的数控车床,手动运动X轴时,伺服电动机不转,系统显示ALM414报警。
分析与处理过程:FANUC 0T-C出现ALM 414报警的含义是“X轴数字伺服报警”,通过检查系统诊断参数DGN720~723,发现其中DGN720 bit5=l,故可以确定本机床故障原因是X轴OVC(过电流)报警。
分析造成故障的原因很多,但维修时最常见的是伺服电动机的制动器未松开。
在本机床上,由于采用斜床身布局,所以X轴伺服电动机上带有制动器,以防止停电时的下滑。
经检查,本机床故障的原因确是制动器未松开:根据原理图和系统信号的状态诊断分析,故障是由于中间继电器的触点不良造成的,更换继电器后机床恢复正常。
FANUC常见伺服报警及解决方法

FANUC 常见伺服报警及解决方法SV0301:APC报警:通信错误1、检查反馈线,是否存在接触不良情况。
更换反馈线;2、检查伺服驱动器控制侧板,更换控制侧板;3、更换脉冲编码器。
SV0306:APC报警:溢出报警1、确认参数、是否正常;2、更换脉冲编码器。
SV0307:APC报警:轴移动超差报警1、检查反馈线是否正常;2、更换反馈线。
SV0360:脉冲编码器代码检查和错误(内装)1、检查脉冲编码器是否正常;2、更换脉冲编码器。
SV0364:软相位报警(内装)1、检查脉冲编码器是否正常;2、更换脉冲编码器。
3、检查是否有干扰,确认反馈线屏蔽是否良好。
SV0366:脉冲丢失(内装)报警1、检查反馈线屏蔽是否良好,是否有干扰;2、更换脉冲编码器。
SV0367:计数丢失(内装)报警1、检查反馈线屏蔽是否良好,是否有干扰;3、更换脉冲编码器。
SV0368:串行数据错误(内装)报警1、检查反馈线屏蔽是否良好;2、更换反馈线;3、更换脉冲编码器。
SV0369:串行数据传送错误(内装)报警1、检查反馈线屏蔽是否良好,是否有干扰源;2、更换反馈线;3、更换脉冲编码器。
SV0380:分离型检查器LED异常(外置)报警1、检查分离型接口单元SDU是否正常上电;2、更换分离型接口单元SDU。
SV0385:串行数据错误(外置)报警1、检查分离型接口单元SDU是否正常;2、检查光栅至SDU之间的反馈线;3、检查光栅尺。
SV0386:数据传送错误(外置)1、检查分离型接口单元SDU是否正常;2、检查光栅至SDU之间的反馈线;3、检查光栅尺。
SV0401:伺服准备就绪信号断开401 报警的故障点。
1、查看诊断,根据的内容转换成二进制数值,进一步确认2、检查MCC回路;3、检查EMG急停回路;4、检查驱动器之间的信号电缆接插是否正常;5、更电源单元。
同步控制中SV0407: 误差过大报警1、检查同步控制位置偏差值;2、检查同步控制是否正常。
FANUC常见伺服报警以及解决方法
FANUC常见伺服报警以及解决方法SV0401:伺服准备就绪信号断开报警原因:伺服放大器伺服准备就绪信号(VRDY)尚未被置于ON 时,或在运行过程中被置于 OFF 时发生此报警。
解决方案:1)排查诊断号358;例如:诊断358=1441,转换为二进制为10110100001,从第5位开始排查,第6位为0,确认首先应排查急停相关接线等。
2)伺服放大器或者轴卡硬件损坏,更换硬件。
2SV0403 硬件/软件不匹配报警原因:轴卡与伺服软件组合不正确,可能的原因有:1)没有提供正确的轴卡;2)闪存中没有安装正确的伺服软件。
解决方法:软件或硬件异常,请直接联系北京发那科维修部门。
3SV404 伺服准备就绪信号接通报警原因:伺服放大器的伺服准备就绪信号(VRDY)一直为 ON 时发生此报警。
解决方法:1)某些特殊情况可以使用参数P1800#1=1进行屏蔽;2)因放大器或者轴卡损坏引起,更换放大器与轴卡。
4SV0409 检查的扭矩异常报警原因:系统开启异常扭矩负载功能之后,检测到异常负载导致。
解决方法:1)如果不适用异常负载检测,请设定参数P2016#0=0;2)如果使用异常负载检测功能,请确认是否存在异常负载现象,例如机械异常卡住,或者异常加工状态;3)如果使用异常负载检测功能,同时加工状态正常,请重新调整该功能的相关参数。
5SV0410 停止时误差过大报警原因:伺服轴停止时误差过大引起报警。
解决方法:1)排查动力线、反馈线是否接错;2)排查伺服电机初始化参数是否有误;3)正确设定不同状态下伺服轴停止时误差报警水平参数P1829、P5312等;4)如果伺服电机使用过程中出现抖动等现象,请先排查抖动问题,SV0410为附加报警;5)Cs轴控制时出现此问题,请检查主轴编码器相关参数。
6SV0411 运动时误差过大报警原因:伺服轴运动时误差过大引起报警解决方法:1)排查动力线、反馈线是否接错;2)排查伺服电机初始化参数是否有误;3)正确设定不同状态下伺服轴停止时误差报警水平参数P1828、P5310等;4)如果伺服电机使用过程中出现抖动等现象,请先排查抖动问题,SV0410为附加报警;5)Cs轴控制时出现此问题,请检查主轴编码器相关参数。
FANUC Alpha系列伺服电机和伺服放大器结构和维修方法
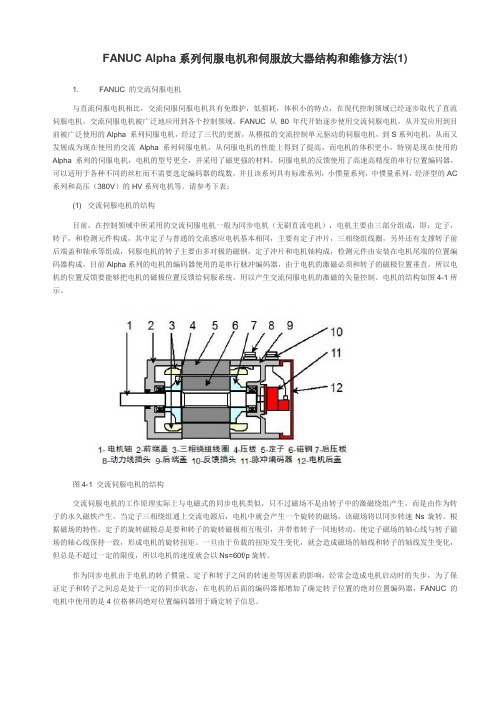
FANUC Alpha系列伺服电机和伺服放大器结构和维修方法(1)1. FANUC 的交流伺服电机与直流伺服电机相比,交流伺服伺服电机具有免维护,低损耗,体积小的特点,在现代控制领域已经逐步取代了直流伺服电机,交流伺服电机被广泛地应用到各个控制领域,FANUC 从80年代开始逐步使用交流伺服电机,从开发应用到目前被广泛使用的Alpha 系列伺服电机,经过了三代的更新,从模拟的交流控制单元驱动的伺服电机,到S系列电机,从而又发展成为现在使用的交流Alpha 系列伺服电机,从伺服电机的性能上得到了提高,而电机的体积更小,特别是现在使用的Alpha 系列的伺服电机,电机的型号更全,并采用了磁更强的材料,伺服电机的反馈使用了高速高精度的串行位置编码器,可以适用于各种不同的丝杠而不需要选定编码器的线数,并且该系列具有标准系列,小惯量系列,中惯量系列,经济型的AC 系列和高压(380V)的HV系列电机等。
请参考下表:(1) 交流伺服电机的结构目前,在控制领域中所采用的交流伺服电机一般为同步电机(无刷直流电机),电机主要由三部分组成,即:定子,转子,和检测元件构成,其中定子与普通的交流感应电机基本相同,主要有定子冲片,三相绕组线圈,另外还有支撑转子前后端盖和轴承等组成,伺服电机的转子主要由多对极的磁钢,定子冲片和电机轴构成,检测元件由安装在电机尾端的位置编码器构成,目前Alpha系列的电机的编码器使用的是串行脉冲编码器,由于电机的激磁必须和转子的磁极位置垂直,所以电机的位置反馈要能够把电机的磁极位置反馈给伺服系统,用以产生交流伺服电机的激磁的矢量控制。
电机的结构如图4-1所示。
图4-1 交流伺服电机的结构交流伺服电机的工作原理实际上与电磁式的同步电机类似,只不过磁场不是由转子中的激磁绕组产生,而是由作为转子的永久磁铁产生,当定子三相绕组通上交流电源后,电机中就会产生一个旋转的磁场,该磁场将以同步转速Ns旋转。
FANUC 很好用的伺服报警维修

04.08.2021
最新课件
4
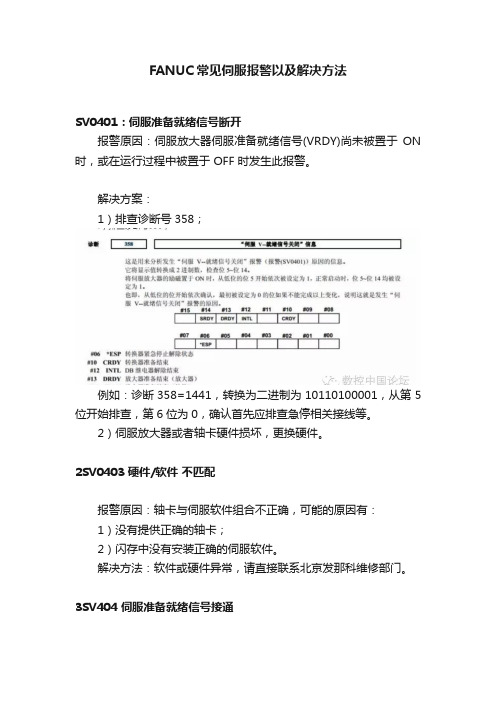
伺服框图
431#电源单元温度升高3 437#电源单元输入过电流1 442#电源单元充电异常5 433#电源单元直流侧低压4 439#电源单元直流侧高压7 435#伺服单元直流侧低压5 600#伺服单元直流侧过流8,9,A 602#伺服单元过热6 449#IPM报警8. 9. A. 603#IPM过热报警8. 9. A. 438#电机电流异常b, c, d
伺服报警
6
BEIJING-FANUC
FAN:A散热器,2单元
3
7或4
FAN:F散热器,1单元 5 8,9,A 8.,9.,A. 6 b,c,d
430 447 453
CXA2A
CXA2B 2
CXA2B
伺服报警
变换器
逆变器
BEIJING-FANUC
伺服 电机
PC
注意) MCOFF:MCC OFF CALM:变换器报警 *CRDY:变换器准备 IALM:逆变报警 RV:接收器 DV:驱动器
接下来只有怀疑该路24V所控制的一些外部开关或其他电器元件是否有瞬间短路 了.找到该路所控部分B3-X13,直接整体甩掉后故障马上排除了。再看该路所控部 分是机床工作指示灯(自动运行指示绿灯)有短路,拔掉其控制用继电器F1KA15后再将B3-X13接上,故障果然也不再出现.询问客户得知该机床的工作指示 灯(包括黄灯和绿灯)都早已坏掉不用了. 在MDI或MEM方式由于自动运行指示绿灯要点亮,自然就会把短路引进去拉低24V 引04.0发8.2报02警1 ,而报警正好又将绿灯熄灭,点最亮新红课件灯,短路自然又被断开,24v自动上 20 升,EMG报警自动消除.
04.08.2021
LSI 信号控制 报警检测 继电器控制 再生控制
FANUC进给伺服控制系统故障诊断与维修
一 台 F 80加工 中心 ( F N C V一 0 配 AU
硬件 检测 到分离 式检测 器 断线 。
除。
Bi t 6
L V
Bi t 5
Bi t 4
Bi t 3
Bi t 2
B t il
Bt i 0
0VC HC AL HVAL DCAL BAL F 0F AL
过 电流与电流异常是两个不同的概念 , 切不可等
O L V : L V: O C: V 过载 报警 。 低 电压报警 。 过 电流报警 。 同看 待 。
明电流异常, 应为电动机的动力线短路或放大器故障。 维修过程 依据操作者提供的故障发生 的经过 , 结合图纸资料进行分析 , 发现 轴电动机动力线对地 短路。进一步检查 , 发现动力线外皮破损 , 在运动过程 中对地短路, 短路 电流 大 , 造成 电流异常。更换 动力 线, 故障排除。
当伺服系统出现故障时 , 在显示屏 或操作 面板上 显示报警内容或报警信息。如 F N C进 给伺服 出现 AU 40— N ( 0 4 7 N为轴号 ) 为伺服故 障报警 。如 4 0表示 N
N轴在 停 止时位 置 误 差 超 过 了设 定 值 ;N 4 4表 示 数 字
伺服出现故障 ;N 4 6表示位置检测连接故 障;N 表示 47
2 故障维修实例
21 故 障 1 .
故障现象
一台 D K 5数控铣床 ( F N c X4 配 A u 一
0 MC系统) 屏显 44 报警 ( 服异常 ) 且 轴伺服 , 1# 伺 ,
指示驱动器报警的原因。
() 2 系统 显示屏 报警
模块单元的窗 口出现 8 报警 。 # 分析 判 定 检 查 诊 断 号 D G 2 . N 70 4位 为 “ ” 表 1,
FANUC0I-B维修(B-63835C)
FANUC 0i-BFANUC 0i Mate-B维修说明书B-63835C/01安全须知B-63835C/01 4与参数有关的警告警告修改完参数第一次加工工件时,要关好机床护罩再进行。
自动运行时,要在机床启动前,在不装刀具,工件的情况下,先用单程序段,进给速度倍率,机床锁住等功能进行运转,充分地确认机床运转正常之后,再使用机床。
否则,机床可能会有不可预见的运动,导致工件或机床的损坏并造成伤害。
注意CNC或PMC的参数被设定为最佳值,通常不需要再修改,当由于某些原因必须修改参数时,要确认你完全了解其参数的用法后再改。
如果参数被错误设定,机床可能会有预料不到的运动,可能会损坏机床或工件并造成伤害。
B-63835C/01 安全须知5与日常维护有关的警告和注释警告1.存储器用电池的更换该项工作必须由受过正规的安全维护培训的专业人员进行。
打开柜门更换电池时,注意不要触高压电路部分(带有标记,并有防电外罩),若碰触到未盖外罩的高压电路,即会触电。
注释因为即使关断CNC电源仍要保留程序,偏移量和参数等数据,所以要使用电池。
如果电池电压下降,会在机床操作面板或CRT画面上显示电池电压降低报警。
当显示出电池低电压报警时,要在一周内更换电池。
否则,存储器的内容会丢失。
更换电池的步骤,请参照本说明书「2.10节电池更换方法」。
安全须知B-63835C/01警告2.绝对脉冲编码器用电池的更换该项工作必须由受过安全维护培训的专业人员进行。
打开柜门,换电池时,注意不要触高电压电路部分(带有标记,并有防电外罩)。
若碰触未盖外罩的高压电路,即会触电。
注释绝对脉冲编码器因要保存绝对位置,所以要用电池。
电池电压低时,机床操作面板,或画面上会显示出绝对脉冲编码器的电池电压低的报警。
若显示了电池低电压报警,需在一周内换电池,若不换,绝对脉冲编码器内部的绝对位置数据会丢失。
换电池的步骤请参照αi系列伺服电机维修说明书(B-65285EN)B-63835C/01 安全须知警告3.保险的更换更换保险时,先要找出引起保险丝熔断的原因,再更换。
FANUC伺服系统的故障诊断与维修

FANUC伺服系统的故障诊断与维修阅读:586伺服系统的故障诊断,虽然由于伺服驱动系统生产厂家的不同,在具体做法上可能有所区别,但其基本检查方法与诊断原理却是一致的。
诊断伺服系统的故障,一般可利用状态指示灯诊断法、数控系统报警显示的诊断法、系统诊断信号的检查法、原理分析法等等。
FANUC伺服驱动系统与FANUC数控系统一样,是数控机床中使用最广泛的伺服驱动系统之一。
从总体上说,FANUC伺服驱动系统可以分为直流驱动与交流驱动两大类。
如前所述,直流驱动又有SCR速度控制单元与PWM速度控制单元两种形式;交流驱动分模拟式交流速度控制单元与数字式交流速度控制单元两种形式。
在1985年以前生产的数控机床上,一般都采用直流伺服驱动,其配套的控制系统有FANUC的FS5、FS6、FS7系统等。
随后生产的数控机床上,一般都采用交流伺服驱动,其配套的控制系统有FANUC 的FS0、FSll、FSl5/16系统等。
5.2.1 FANUC直流伺服系统的故障诊断与维修直流伺服系统一般用于20世纪80年代中期以前生产的数控机床上,这些数控机床虽然距今已经有二十多年,但由于当时数控系统的价格十分昂贵,通常只有在高、精、尖设备中才采用数控,因此,其机床的刚性、可靠性等各方面性能通常都较好,即使在今天,很多设备还是作为企业的关键设备在使用中,故直流伺服系统的维修仍然是今天数控机床维修的重要内容。
1.SCR速度控制单元的常见故障与维修SCR速度控制单元的主要故障与可能的原因,常见的有以下几种。
(1)速度控制单元熔断器熔断造成速度控制单元熔断器烧断的原因有下述几种:1)机械故障造成负载过大。
如:滑动面摩擦系数太大;齿轮啮合不良;工件干涉、碰撞;机械锁紧等。
以上故障可通过测量电动机电流来判断确认。
2)切削条件不合适。
如:机床切削量过大,连续重切削等。
3)控制单元故障。
如:控制单元的元器件损坏,控制板上设定端设定错误,电位器调整不当等。
fanuc β 伺服报警的故障诊断及实际处理方法
长春汽车工业高等专科学校
(2)全闭环控制形式 全闭环控制形式
如果数控机床采用分离型位置检测装置作为位置反馈信号,则进给 如果数控机床采用分离型位置检测装置作为位置反馈信号, 伺服控制形式为全闭环控制形式。在全闭环控制形式中, 伺服控制形式为全闭环控制形式。在全闭环控制形式中,进给伺服 系统的速度反馈信号来自伺服电动机的内装编码器信号, 系统的速度反馈信号来自伺服电动机的内装编码器信号,而位置反 馈信号是来自分离型位置检测装置的信号。 馈信号是来自分离型位置检测装置的信号。 全闭环控制特点:位置控制精度相对高, 全闭环控制特点 位置控制精度相对高,此时精度由位置检测装置 位置控制精度相对高 精度决定(目前光栅尺的精度有1µm、0.5µm、0.1µm)。 精度决定(目前光栅尺的精度有 、 、 )。 全闭控制相对稳定性不高,易出现系统振荡现象,伺服调整比较困 全闭控制相对稳定性不高,易出现系统振荡现象, 克服上面的不足。 但伺服软件技术的发展,新的数控系统克服上面的不足 难。但伺服软件技术的发展,新的数控系统克服上面的不足。
长春汽车工业高等专科学校
FANUC 系统 系列伺服模块实际连接图 轴) 系统α系列伺服模块实际连接图 系列伺服模块实际连接图(4轴
长春汽车工业高等专科学校
FANUC 系统 系列伺服模块连接原理图 轴) 系统α系列伺服模块连接原理图 系列伺服模块连接原理图(4轴
长春汽车工业高等专科学校
2.FANUC 系统 系列伺服模块端子接口功能 系统αi系列伺服模块端子接口功能
长春汽车工业高等专科学校
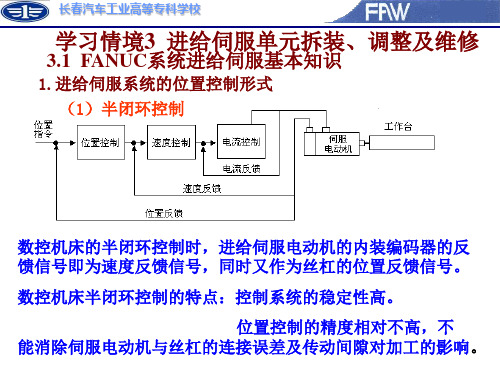
3.1 FANUC系统进给伺服基本知识 系统进给伺服基本知识
1.进给伺服系统的位置控制形式 1.进给伺服系统的位置控制形式 (1)半闭环控制
学习情境3 进给伺服单元拆装、 学习情境 进给伺服单元拆装、调整及维修
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
TRAINING-LZW
7
PSM上显示1; SPM-30; 437# 报警内容:PSM5.5i-15i检测出主电路IPM模块异常 处理方法: 1.IPM模块控制电压降低,测量IPM模块 2.输入电压低,输入电源电压不平衡 3.更换单元 报警内容:PSM15i-37i主电路流过的电流大 处理方法: 1.输入电压低,输入电源电压不平衡 2.IGBT模块故障,更换单元
伺服报警
FAN:A散热器,2单元 3 7或4 FAN:F散热器,1单元 5 8,9,A 8.,9.,A.
BEIJING-FANUC
6 b,c,d 430 447 453
CXA2A
CXA2B
2
6
CXA2B
伺服报警
变换器 逆变器
伺服 电机
BEIJING-FANUC
PC
注意) MCOFF:MCC OFF CALM:变换器报警 *CRDY:变换器准备 IALM:逆变报警 RV:接收器 DV:驱动器
437报警:PSM输入回路过电流。原因可能是输入电源电压 不平衡
8
2017/8/4
TRAINING-LZW
PSM上显示2; 443 主轴9059 报警内容:PSM内部排风扇失效. 处理方法: 观察冷却风扇的状态. 更换风扇,更换侧板 443报警:PSM内部排风扇停止。 β系列SVU内部排风扇失效。 610报警:警告状态下伺服放大器的报警号。 伺服放大器警告状态及与他们相关的警告信号: F93#7=1(SVMRN4), F93#6=1(SVMRN3),从警告状态信 号产生到报警发生的时间为1分钟.
伺服放大器警告状态及与他们相关的警告信号: F93#7,#6,#5=1,1,1(SVMRN4),从警告状态信号产生到报警发生的 时间为1分钟 处理方法: 1.切削负荷(加工一段时间后出现) 2.冷却风扇的运转状态(风扇机械卡死,风扇故障,控制侧板故障) 3.环境, 电路板上有灰尘. 12 TRAINING-LZW 2017/8/4 4. 底板和侧板的连接处
LSI 信号控制 报警检测 动态制动器 控制
2017/8Hale Waihona Puke 4TRAINING-LZW
3
伺服报警
FANUC
BEIJING-
伺服 电机 动态 制动器
注意) ISO:隔离放大器 IR,IS:电流反馈 HV:高电压 LV:低电压 HC:高电流 IPM:集成功率模块
2017/8/4
缺相 报警
继电器
LSI 信号控制 报警检测 继电器控制 放电控制
LSI 信号控制 报警检测 动态制动器 控制
TRAINING-LZW
4
伺服框图
431#电源单元温度升高3 437#电源单元输入过电流1 442#电源单元充电异常5
433#电源单元直流侧低压4
439#电源单元直流侧高压7 435#伺服单元直流侧低压5 600#伺服单元直流侧过流8,9,A
602#伺服单元过热6
449#IPM报警8. 9. A. 603#IPM过热报警8. 9. A. 438#电机电流异常b, c, d
2017/8/4
TRAINING-LZW
5
伺服报警相应含义
报警号 431 432 SVM PSM 3 6 报警内容 PSM:主电路过载。Β系列:发生过热。 PSM、PSMR:控制电压降低。
L、M、N轴放大器DC链路电流异常 放大器 散热器冷却风扇不转。 放大器过热。 L轴 放大器 IPM报警(OH) M轴 放大器 IPM报警(OH) N轴 放大器 IPM报警(OH) 放大器模块之间通信异常 PSMR:再生电流过大。 PSM、PSMR:散热器冷却风扇不转。
607
E
输入电源缺相
2017/8/4
2
TRAINING-LZW
伺服报警
BEIJING-FANUC
伺服 电机 动态 制动器
注意) ISO: 隔离放大器 IR,IS:电流反馈 HV:高电压 LV:低电压 HC:高电流 IPM:集成功率模块
输入电 流报警 缺相 报警
继电器
LSI 信号控制 报警检测 继电器控制 再生控制
2017/8/4
LSI 信号控制 报警检测 继电器控制 再生控制
LSI 伺服控制 通讯控制 信号控制 报警检测
LSI CNC 通讯
注意) ISO:隔离放大器 DB:动态制动器 *MCON:MCC ON *DRDY:驱动(Amp.) 准备 *PWM:脉冲宽度调制 IU,IV:电流反馈 BATT:SV编码器电池
433
434 435 436 437 438 439 440 441 b、c、d 2 5
4
PSM、PSMR、α 、β:DC LINK电压低。
SVM:控制电源低电压。 SVM:DC链路部低电压 数字伺服软件检测到软件过热(OVC).
1 7 H
输入电路过电流 L、M、N轴 变频器 电机电流异常。 PSM、PSMR、α 、β:DC LINK过电压。 PSMR、 α 系列SVU:再生放电总量过大。 数字伺服软件检测到电机电流检测回路异常。
伺服报警相应含义
报警号 448 449 453 600 601 602 603 603 603 604 605 606
SVM
PSM
报警内容 内置脉冲编码器的反馈数据符号与分离型检测器的反馈数据符号 不同
8.、9.、 A.
L、M、N轴 放大器IPM报警。 α 脉冲编码器软断线
8、9、A F 6 8. 9. A. P 8 A
442
443 444 445 446 447
2017/8/4
5
2 1
PSM、PSMR: DC LINK的备用放电回路异常
PSM、PSMR、 β系列SVU:内部风扇不转。 内部冷却风扇不转。 数字伺服软件检测到某脉冲编码器断线。 硬件检测到内置脉冲编码器断线 硬件检测到分离型检测器断线
TRAINING-LZW 6
2017/8/4
TRAINING-LZW
9
2017/8/4
TRAINING-LZW
10
PSM上显示 A 主轴9113 SPM-b3 606报警:PSM散热冷却风扇停转。 611报警:警告状态下伺服放大器的报警号。
2017/8/4
TRAINING-LZW
11
PSM上显示3 主轴9058 报警内容: PSM主电路过载 主回路散热器过热 431报警:PSM过热,β系列SVU过热。 612报警,警告状态下伺服放大器的报警号 . 200号的状态和201#7的状 看一下是否有414报警,同时观察诊断 态