第五章矩阵特征问题的求解
第五章 矩阵的相似变换和特征值.
例5. 设为方阵A的特征值, 证明() = 22 –3 +4.
为(A) = 2A2 –3A +4I的特征值.
证明: 因为为A的特征值, 即有非零向量x使Ax = x,
于是(A)x = (2A2 –3A +4I)x
1
(k1p1, k2p2, …, kmpm) 1
1 2
m1 1
m1 2
=
O.
1
m
m1 m
由此可得(k1p1, k2p2, …, kmpm) = O.
因而k1 = k2 = … = km = 0.
这就证明了p1, p2, …, pm是线性无关的.
第五章 矩阵的相似变换和特征值
§5.1 方阵的特征值和特征向量
第五章 矩阵的相似变换和特征值
§5.1 方阵的特征值和特征向量
一. 特征值, 特征向量的定义和计算
1. 设A是n阶方阵, 为数, 为n维非零向量. 若A = , 则称为A的特征值, 称为A 的对应于的特征向量.
2. 由A =得齐次线性方程组(I–A) =, 它有非零解系数行列式|I–A|=0, 这个 关于的一元n次方程, 称为A的特征方程, |I–A|称为A的特征多项式.
二. 特征值, 特征向量的性质
定理5.1. 设1, …, n(实数或复数, 可以重复)
是n阶方阵A=[aij]的n个特征值, 即
|I–A| = (–1) (–2)…(–n).
则
n
n
i=1i = trA =i=1aii
n
i =1
i
=
detA
=
|A|
第五章矩阵的特征值

第五章矩阵的特征值矩阵的特征值是线性代数中一个重要的概念。
它不仅在理论上具有重要意义,也在实际问题的求解中有广泛的应用。
本章将介绍特征值的定义和性质,以及求解特征值和特征向量的方法。
1.特征值的定义对于一个n阶方阵A,如果存在一个非零向量x使得Ax=kx,其中k 为常数,则称k为矩阵A的特征值,x为对应的特征向量。
特征值和特征向量总是成对出现的,且特征向量是非零的。
2.特征值与特征向量的性质2.1特征值的性质(1)特征值的个数等于矩阵的阶数n。
(2)特征值的和等于矩阵的迹,即trace(A)。
(3)特征值的乘积等于矩阵的行列式,即det(A)。
2.2特征向量的性质(1)特征向量的线性组合仍然是特征向量,对应的特征值不变。
(2)特征向量与特征值的对应关系是一一对应的。
3.求解特征值和特征向量的方法3.1特征方程法给定一个n阶方阵A,求解特征值和特征向量的方法之一是通过求解特征方程。
特征方程的定义是:det(A-kI)=0,其中I是单位矩阵,k是变量。
通过求解特征方程,即求解多项式det(A-kI)的根,可以得到所有的特征值。
特别地,对于二阶矩阵A的特征方程det(A-kI)=0可以化简为k^2-(a+d)k+ad-bc=0,其中a,b,c,d是矩阵A的元素。
这是一个一元二次方程,可以通过求根公式求解。
3.2幂法幂法是一种迭代算法,用于求解矩阵的最大特征值和对应的特征向量。
基本思想是通过迭代计算矩阵A的幂,使得向量序列收敛到A的最大特征向量对应的特征向量。
具体步骤如下:(1)选择一个初始的非零向量x0;(2)计算新的向量x1=Ax0;(3)归一化向量x1,即x1=x1/,x1,其中,x1,表示向量x1的模;(4)重复步骤(2)和(3),直到向量序列收敛。
经过多次迭代后,向量序列将收敛到A的特征向量。
4.应用举例特征值和特征向量在许多实际问题中有广泛的应用,例如:(1)求解线性方程组:矩阵A的特征值可以用于判断线性方程组的解的情况。
线性代数学习指导第五章矩阵的特征值与特征向量

第五章 矩阵的特征值与特征向量一.内容提要1 . 特征值和特征向量定义1 设()ijn nA a ⨯=是数域P 上的n 阶矩阵,若对于数域P 中的数λ,存在数域P 上的非零n 维列向量X ,使得X AX λ=则称λ为矩阵A 的特征值,称X 为矩阵A 属于(或对应于)特征值λ的特征向量 注意:1)()ijn nA a ⨯=是方阵;2)特征向量 X 是非零列向量;3)方阵 ()ijn nA a ⨯= 与特征值λ 对应的特征向量不唯一4)一个特征向量只能属于一个特征值.2.特征值和特征向量的计算计算矩阵A 的特征值与特征向量的步骤为: (1) 计算n 阶矩阵A 的特征多项式|λE -A |;(2) 求出特征方程|λE -A |=0的全部根,它们就是矩阵A 的全部特征值; (3) 设λ1 ,λ2 ,… ,λs 是A 的全部互异特征值。
对于每一个λi ,解齐次线性方程组()i E A X λ-=0,求出它的一个基础解系,该基础解系的向量就是A 属于特征值λi 的线性无关的特征向量,方程组的全体非零解向量就是A 属于特征值λi 的全体特征向量.3. 特征值和特征向量的性质性质1 (1)若X 是矩阵A 属于特征值λ的特征向量,则kX (0k ≠)也是A 属于λ的特征向量;(2)若12,,,s X X X 是矩阵A 属于特征值λ的特征向量,则它们的非零线性组合1122s s k X k X k X +++也是A 属于λ的特征向量;(3)若A 是可逆矩阵,λ是A 的一个特征值,则λ1是A —1的一个特征值,λ||A 是A *的一个特征值;(4)设λ是n 阶矩阵A 的一个特征值,f (x )= a m x m + a m-1x m -1 + … + a 1x + a 0为一个多项式,则()f λ是f (A )的一个特征值。
性质2(1) nn n a a a +⋅⋅⋅++=+⋅⋅⋅++221121λλλ(2) || 21A n =⋅⋅⋅λλλ性质3 n 阶矩阵A 和它的转置矩阵T A 有相同的特征值 性质4 n 阶矩阵A 不同的特征值所对应的特征向量线性无关4. 相似矩阵定义2 设A 、B 为n 阶矩阵,若存在可逆矩阵P ,使得B=P ―1AP则称A 与B 相似。
第五章矩阵的特征值和特征向量
1 0
1 0
x1 x2
0 0
x1
x2
0
取 x2
1, 得基础解系
P1
1 11
特征值和特征向量的性质:
1. A与AT有相同的特征值;
2. A 12L n 推论 : A可逆 所有的i 0, i aii
3. 若是A的特征值,x是对应的特征向量,则: (1) k是Ak的特征值,x是Ak的对应k的特征向量;
2c是cA的特征值,x是cA的对应c的特征向量;
3 c是A cE的特征值,x是A cE的对应 c的特征向量;
4 f 是f A的特征值,x是f A的对应f 的特征向量;
5 1 是A1的特征值,x是A1的对应 1 的特征向量。
4.对应不同特征值的特征向量线性无关。
5.(圆盘定理):A的每一个特征值必在下列圆盘中的某一个中
z
|
z aii
aij
,
i
1, 2,L
n
ji
2
方阵A的对角化
方阵 A 的对角化,即寻找相似变换矩阵 P,使 P-1AP= ∧ 为对角矩阵.
什么样的方阵能够与一个对角阵相似呢? 定理:A 与一个对角阵相似的充要条件是
A 有 n 个线性无关的特征向量。 推论:如果 A 有 n 个互异的特征值,则 A 必
vk Avk 1 Ak v0 Ak (a1x1 a2 x2 L an xn )
a11k x1 a22k x2 L annk xn
1k
[a1
x1
a2
2 1
k
x2 L
an
n 1
xn ]
1k a1x1
lim
k
第5章__特征值问题计算方法

第五章 特征值问题计算方法设n n A R ⨯∈或n nA C⨯∈。
特征值问题是求C λ∈及非零向量nx C ∈,使得Ax x λ=A 的特征多项式()det()P I A λλ=-。
当5n ≥,λ不能用解析来表示。
因此数值方法为迭代法。
§1 幂法与反幂法 (I ) 方法设n n A R ⨯∈,有n 个线性无关的特征向量(即A 可以对角化)。
设A 的特征值1,,n λλ,相应的特征向量为12,,n x x x 。
并设12n λλλ>≥≥1λ称为A 的主特征值。
幂法是用来求主特征值和相应特征向量的方法。
基本思想 是任取非零向量(0)v,由矩阵A 构造迭代格式()(1)1,2,k k v Av k -==得 {}()k v(1)(0)A AV = (2)(1)2(0)v Av A v ==()(1)(0)k k k v Av A v -=== 由假定,A 有n 个线性无关的特征向量12,,n x x x 。
于是(0)(0)1,nn i i i vR vx α=∈=∑设 10α≠。
(1)(0)11n ni i i i i i i vAvAx x ααλ=====∑∑同理有()(1)1,1,2,nk k k i i i i vAvx k αλ-====∑对于这个迭代格式分情况讨论 1.主特征值为单根,即123n λλλλ>≥≥≥此时()21112211kkk k n n n v x x x λλλαααλλ⎡⎤⎛⎫⎛⎫⎢⎥=+++ ⎪ ⎪⎢⎥⎝⎭⎝⎭⎣⎦同理:11(1)121112211k k k k n n n vx x x λλλαααλλ++++⎡⎤⎛⎫⎛⎫⎢⎥=+++ ⎪ ⎪⎢⎥⎝⎭⎝⎭⎣⎦因为1(2,3,,)i i n λλ>=1lim 0,2,3,,ki k i n λλ→∞⎛⎫⇒== ⎪⎝⎭()111k kv x αλ⇒≈ (k 充分大!!)这说明,()111k k vx αλ=为特征值1λ所对应的特征向量的近似向量。
第5章矩阵特征值和特征向量
C C2 1
C0 C0
C
a a (k1) (k1)
pp
2a
(k 1) pq
tan
C
sgn(C) C2 1
t
cos 1
1 t2
sin t cos
if
a ( k -1) pq
a ( k -1) pp
a ( k -1) qq
,
we take t as
t
1 2C
a ( k 1) pq
sin
ai(pk -1)
另外,实际问题中的具体要求不同,有时只要求A 的绝对值最大的特征值(主特征值)及相应的特征 向量;有时又要求全部的特征值及特征向量。根据 这两种不同要求,求矩阵的特征值与特征向量的方 法也大致分为两类:迭代法(幂法反幂法)、变换 法。
关于矩阵特征值及特征向量的一些结论:
Th1. i (i=1,…,n)为A的特征值,则有
n 1
n
n 1
xn
k
xn
k
x1 max(
x1
)
对应1的特征向量x1 的规范化向量
vk
Ak v0 max Ak1v0
1k
1x1
2
2 1
k
x2
n
n 1
k
xn
k1 1
max
1
x1
2
2 1
k 1
x2
n
n 1
k
1
xn
max
vk
1k
max
1x1
做迭代 u0 v0
vk Auk1
uk
vk
max vk
有
uk
x1 ,
max x1
矩阵特征值计算
其 中 每个 对角 块 ������������������ 均 为方阵 , 则矩 阵 ������ 的 特征 值为各 对 角块 矩阵 特征 值的合 并 ,即 ������(������) = ⋃������ ������=1 ������(������������������ ). 定理 5.5: 矩阵的相似变换(similarity transformation)不改变特征值. 设矩阵������和������为相似矩阵, 即存在非奇异矩阵������使得������ = ������−1 ������������,则 (1) 矩阵������和������的特征值相等,即 ������(������) = ������(������) ; (2) 若������为������的特征向量,则相应地,������������为������的特征向量. 通过相似变换并不总能把矩阵转化为对角阵,或者说矩阵 ������ 并不总是 可对角化 的 (diagonalizable). 下面给出特征值的代数重数、几何重数,和亏损矩阵的概念,以及几个定 理.. ̃1 , ⋯ , ������ ̃������ ,若������ ̃������ 是特征方程的������������ 重 定义 5.2: 设矩阵������ ∈ ℝ������×������ 有 m 个(mn)不同的特征值������ ̃������ 的代数重数(algebraic multiplicity),并称������ ̃������ 的特征子空间(ℂ������ 的子空间)的维数 根,则称������������ 为������ ̃������ 的几何重数(geometric multiplicity). 为������ ̃1 , ⋯ , ������ ̃������ ,特征值������ ̃������ , (������ = 1, ⋯ , ������)的代数 定理 5.6:设矩阵������ ∈ ℝ������×������ 的 m 个不同的特征值为������ 重数为������������ ,几何重数为������������ ,则 (1) ∑������ ������=1 ������������ = ������,且任一个特征值的几何重数不大于代数重数,即∀������,������������ ≥ ������������ . (2) 不同特征值的特征向量线性无关,并且将所有特征子空间的∑������ ������=1 ������������ 个基(特征向量)放在 一起,它们构成一组线性无关向量. (3) 若每个特征值的代数重数等于几何重数,则总共可得������个线性无关的特征向量,它们是 全空间ℂ������ 的基. 定义 5.3:若矩阵������ ∈ ℝ������×������ 的某个代数重数为 k 的特征值对应的线性无关特征向量数目少于 k(即几何重数小于代数重数) ,则称 ������为亏损阵(defective matrix) ,否则称其为非亏损阵 (nondefective matrix). 定理 5.7:设矩阵������ ∈ ℝ������×������ 可对角化,即存在非奇异矩阵������ ∈ ℂ������×������ 使得 ������−1������������ = ������, 其中������ ∈ ℂ������×������ 为对角阵, 的充要条件是������为非亏损矩阵. 此时,������的对角线元素为矩阵������的特 征值,而矩阵������的列向量为 n 个线性无关的特征向量. 定理 5.7 中方程的等价形式为������ = ������������������−1, 它被称为特征值分解,也叫谱分解(spectrum decomposition). 特征值分解存在的充要条件是������为非亏损矩阵. 但现实中还有很多矩阵是亏 损矩阵,例如例 5.2 中的矩阵,它的特征值 2 的代数重数为 2,而几何重数仅为 1. 这种矩阵
第五章矩阵特征值问题同步复习

第五章矩阵特征值问题同步复习第五章矩阵特征值问题一、内容提要§5.1 特征值与特征向量1.定义设A 为阶方阵,如果存在数n λ以及一个非零n 维列向量ξ,使得关系式λξξ=A 成立,则称λ为A 的一个特征值,非零向量ξ为A 的属于特征值λ的特征向量。
2.求特征值和特征向量的步骤:(1)计算特征多项式A I -λ;(2)求A 的特征方程A I -λ=0的全部根,它们就是A 的所有特征值;(3)对于A 的每一个特征值λ,求解齐次线性方程组()0=。
设它的一个-X A I λ基础解系为,,,,21r n -ξξξ (其中)(A I r r -=λ),则A 的属于λ的全部特征向量为,2211r n r n k k k --+++ξξξ其中是不全为零的任意数。
r n -21k k k ,,,3.性质● 方阵A 与其转置矩阵T A 有相同的特征多项式,从而有相同的特征值;● )(21A tr n =+++λλλ , A n =λλλ 21;● 可逆矩阵A 与1-A 的特征值互为倒数;● 设λ是矩阵A 的特征值,)(x g 是一个多项式,则)(λg 是)(A g 的特征值;● 如果n 阶矩阵A 有n 个不同的特征值,则A 有n 个线性无关的特征向量;● 设s λλλ,,,21 是矩阵A 的s 个互不相同的特征值,而i in i i ααα,,,21 是A 的分别对应于特征值i λ的线性无关的特征向量组,则向量组111211,,,n ααα ; 222221,,,n ααα ; ...; ssn s s ααα,,,21 线性无关.§5.2 矩阵的相似性1.定义设A ,都是阶方阵,如果阶可逆矩阵B n P ,使B AP P =-1,则称矩阵A 与相似,记为B B A ~。
如果P 为正交矩阵,则称A 与B 正交相似。
2.命题相似矩阵有相同的特征多项式,从而有相同的特征值,相同的行列式和迹。
3.对角化的条件(1)充要条件:n 阶方阵A 可对角化的充分必要条件是A 有n 个线性无关的特征向量。
第五章-矩阵的特征值和特征向量
第五章-矩阵的特征值和特征向量特征值,特征向量: A是n阶⽅阵, 对于数λ, 若存在⾮零列向量α,使得Aα=λα, 此时λ就是特征值, α对应于λ的特征向量λEα - Aα = 0, (λE-A)α=0, 所以(λE-A)x=0 的⾮零解↔|λE-A|=0λE-A: 叫做特征矩阵|λE-A|: 叫做特征多项式|λE-A|: 叫做特征⽅程λ: 叫做特征值, 特征根λ是A的特征值, α是λ对应对的特征向量, cα也是λ的特征向量(c≠0)解带λ的⾏列式:完全展开|X|得⽅程组,(不推荐)把某⾏尽可能化为零, 按⾏展开提公因⼦(含λ)相反数, 相同数, ⾏和列相同特征值, 特征向量的基本性质:A和A T有相同的特征值(注:特征向量不⼀定相同)n个特征值λ1, λ2...λn,∑λi=Σa ii(i=1,...n)(特征值的和=矩阵对⾓线元素的和)λ1·λ2·...λn = |A|(所有特征值相乘=⾏列式的值)A可逆的充要条件是A≠0互不相同的特征值λ1,λ2,...λm对应的特征向量α1,α2,...αn线性⽆关Kλ是KA的特征值,λk是A k的特征值1/λ|A|是A*的特征值相似矩阵:, A,B是两个同阶⽅阵, 存在n阶可逆矩阵P, 使得P-1AP=B, 那么我们就说⽅阵A,B相似. A~B反⾝性: A~A, E-1AE=B对称性: A~B→B~A传递性: A~B, B~C→A~C, P-1AP=B, Q-1BQ=C, 所以Q-1P-1APQ=C (PQ)-1A(PQ)=CA~B, A,B具有相同的特征值, 矩阵A,B的⾏列式|A|=|B|, 矩阵的迹tr(A)=tr(B)(迹是指祝对⾓线元素相加)|λE-A|=|λE-B|, 因为:P-1AP=B,所以|λE-P-1AP|=|λP-1EP-P-1AP|=|P-1||λE-A||P| = |λE-A|如果A~B, A可逆↔B可逆, A-1~B-1如果A~B, 则A m~B m两个矩阵相似:tr(A)=tr(B)|A|=|B|均可逆或者不可逆A-1~B-1A m~B m特征值相同r(A)=r(B)定理: A相似余对⾓形↔A有n个线性⽆关的特征向量推论: A有n个异互的特征根, A~对⾓形定理: A~对⾓形↔对于r i重根, 基础解系有r i个解实对称矩阵的对⾓化含有n个线性⽆关向量的矩阵对⾓化内积:2个向量(同型)的对应元素乘积的和(本质实⼀个数)本⾝性, (α·α)=α12+α22+α32≥0 (α·α)=0↔α=0对称性, (α·β)=(β·α)齐次性, (kα·β)=k(α·β), (α·kβ)=k(α·β), (kα·kβ)=k2(α·β), (α+β, γ)=(α,γ)+(β,γ), (k1α1+k2α2,m1β1+m2β2)=k1m1(α1,α2)+k1m2(α1,β2)+k2m1(α2,β1)+k2m2(α2,β2)(α·β)=αT·β=α·βT向量的长度(范数, 模)向量⾃⾝内积开平⽅: ||α||=(α·α)1/2推⼴: (α·α)=||α||2当α=(-1, -1, 5), ||α||=[(-1)2+(-1)2+52]1/2点到原点的距离, 特别的: ||α||=1, 单位向量, eg:α=(1,0,0), 单位化(标准化)性质1: ||α||≥0, ||α||=0↔α=0性质2(齐次性): ||kα||=|k|||α||性质3: |(α,β)|≤||α||·||β||性质4(三⾓不等式):||α+β||≤||α||+||β||性质5(正交,垂直):(α,β)=0 α垂直β (0,α)=0性质6(正交向量组): α1, ...αs, 两两正交(不包含零向量)定理: α1,...αs正交向量组, α1,...αs线性⽆关施密特正交化给⼀组线性⽆关的向量组α1,...αs, 求与之等价的正交β1,...βsβ1=α1β2=α2-[(α2,β1)/(β1,β1)]β1β3=α3-[(α3,β1)/(β2,β1)]β1-[(α3,β2)/(β2,β2)]β2β4=α4-[(α4,β1)/(β1,β1)]β1-[(α4,β2)/(β2,β2)]β2-[(α4,β3)/(β3,β3)]β3正交矩阵:定义: 如果矩阵A是以个n阶⽅阵, 则AA T=E, 就说明A为正交矩阵性质1: 如果矩阵A实正交矩阵, 则|A|=1 or -1 ,, 证明: A T A=E, |A T A|=1, |A T||A|, |A|2=1性质2:矩阵A为正交矩阵, A-1=A T, 且A-1和A T均正交性质3:如果A,B实正交矩阵, 那么A·B也是正交矩阵(AB)T AB=B T A T AB=B T B=E性质4: A正交矩阵, α,β列, (Aα, Aβ)=(α,β)定理: 如果A是正交矩阵↔矩阵A的列(⾏)向量是标准正交向量组实对称矩阵的对⾓化定理: 是对称矩阵A的不同特征值的特征向量正交正交相似: A,B同阶,存在正交矩阵P,使得P-1AP=B, 那么A,B叫做正交相似。
第五章 .特征值特、征向量及矩阵对角化总结

第五章 特征值、特征向量及矩阵的对角化(填空、选择为主)5.1矩阵的特征值和特征向量定义(矩阵的特征值和特征向量)设A 为n 阶方阵,如果存在数λ及非零向量x,使得 x Ax λ=(4-1) 或0)(=-x A E λ (4-2)则称λ为A 的一个特征值,x 为A 的对应于(或属于)特征值λ的一个特征向量. 求n 阶方阵A 的特征值与特征向量的一般步骤如下: 第一步:计算特征多项式||A E -λ;第二步:求出特征方程||A E -λ=0的全部根n λλλ,,,21 (重根按重数计算),则n λλλ,,,21 就是方阵的全部特征值.如果i λ为特征方程的单根,则称i λ为A 的单特征值;如果j λ为特征方程的k 重根,则称j λ为A 的k 重特征值,并称k 为j λ的重数;第三步:对A 的相异特征值中的每个特征值i λ,求出齐次线性方程组 0)(=-A E i λ(4-3)的一个基础解系j ik i i ξξξ,,,21 ,则j ik i i ξξξ,,,21 就是对应于特征值i λ的特征空间的一个基,而A 的属于i λ的全部特征向量为 j j ik k i i c c c x ξξξ+++= 2211 其中j k c c c ,,,21 为不全为零的任意常数.特征值和特征向量有下列基本性质:性质1 设n n ij a A ⨯=)(的全部特征值为n λλλ,,,21 ,则有||,21121A an ni iin ==+++∑=λλλλλλ利用性质1可以简化有关特征值问题的某些计算.性质2 设λ为方阵A 的一个特征值,且x 为对应的特征向量,则对任何正整数k,kλ为kA 的一个特征值且x 为对应的特征向量.更01)(a x a x a x f m m +++= ,则)(λf 为方阵E a A a A a A f m m 01)(+++= 的一个特征值,且x 为对应的特征向量.性质3 设λ为可逆方阵A 的一个特征值,则λλ1,0≠为1-A 的一个特征值,λ||A 为*A 的一个特征值性质4 设m λλλ,,,21 为方阵A 的互不相同的特征值,i x 为属于i λ的特征向量),,2,1(m i =,则向量组m x x x ,,,21 线性无关.更一般的,设i ik i i x x x ,,,21 为属于i λ的线性无关特征向量),,2,1(m i =,则向量组 m m k m m k k x x x x x x x x x ,,,,,,,,,,,,21222211121121 线性无关性质5 设重特征值,则属于的为方阵k A 0λ0λ的线性无关特征向量的个数不大于k 关于特征值与特征向量的结论见下图:5.2相似矩阵及方阵可相似对角化的条件定义(相似矩阵)对于同阶矩阵A,B ,若存在同阶可逆矩阵P ,使得B AP P =-1(4-4)则称A 与B 相似,或A 相似于B ,并称变换:AP P A 1-→ 为相似变换.矩阵的相似关系具有反身性(A 与A 相似)、对称性(A 与B 相似,则B 与A 相似)和传递性(A 与B 相似,B 与C 相似,则A 与C 相似).定理(矩阵A 与B 相似的必要条件)设矩阵A 与B 相似,则有 (1))()(B r A r =; (2)||||B A =;(3)||||B E A E -=-λλ,即A 与B 有相同的特征多项式(从而A 与B 有相同的特征值)(但要注意到其特征向量不一定相等);(4)TA 与TB 相似,1-A 与1-B相似,k A 与kB 相似.推论 若n 阶矩阵A 相似于对角矩阵∧=diag(ƛ1,ƛ2,…,ƛn )时,∧的主对角线元素ƛ1,ƛ2,…,ƛn 就是A 的n 特征值.定理(矩阵相似与对角矩阵的充分必要条件)n 阶矩阵A 相似于对角矩阵的充分必要条件是A 有n 个线性无关的特征向量.推论 矩阵A 相似于对角矩阵的充分必要条件是A 的属于每个特征值的线性无关特征向量个数正好等于该特征值的重数.定理(矩阵相似于对角矩阵的充分条件)如果n 阶矩阵A 有n 个互不相同的特征值(即A 的特征值都是特征值),则A 必相似于对角矩阵.矩阵可相似对角化的条件见下图(设A 是n 阶矩阵)5.3 向量的内积、长度及正交性定义 几何中,两个向量 的数量积定义为:其中 是 的长度, 是的夹角.如果在直角坐标系下,向量表示为则依据坐标表示向量 的长度为: ,向量 的夹角为:代数中定义 设 维向量称为向量的内积.称为向量 的长度(或范数),特别,当 时,称 为单位向量.称 为向量 与 的夹角;特别,,当 (即 )时,称向量 与 正交. 注:内积是向量的一种运算,如果x 和y 都是列向量,可以记作[x ,y]=x T y ,其结果是一个数.且[x ,x]=x 1^2+x 2^2+…+x n ^2≥0,当且仅当x=0时成立.4. 向量长度的性质:(1) 非负性:0≥α且00=⇔=αα (2) 齐次性:ααk k = (3) 三角不等式:βαβα+≤+以上定义的概念有如下性质:1 .2 .3 .4 . ,( )5 .6 .7 .称一组两两正交的非零向量为正交向量组.定理设n维向量是一组两两正交的非零向量(或称是正交向量组),则线性无关.证设,两边与作内积,得因故,同理,,所以线性无关.定义设是向量空间,是的一组基,且是正交向量组,则称是的一组正交基.如果既是的一组正交基,又是单位向量,则称是规范正交基或单位正交基.正交基的求法(施密特正交化公式解决矩阵的对角化问题):1.正交化设是向量空间,是的一组基,则,,是的一组正交基.2.单位化如果取则是规范正交基.例3 设⎪⎪⎪⎭⎫ ⎝⎛-=1211α,⎪⎪⎪⎭⎫ ⎝⎛-=1312α,⎪⎪⎪⎭⎫ ⎝⎛-=0143α,试用施密特正交化过程把这组向量规范正交化.解 取11α=b ;[]⎪⎪⎪⎭⎫⎝⎛-=⎪⎪⎪⎭⎫⎝⎛--⎪⎪⎪⎭⎫ ⎝⎛-=-=1113512164131,1211222bb b b αα; [][]⎪⎪⎪⎭⎫ ⎝⎛=--=1012,,222231211333b b b b b b b ααα. 再把它们单位化,取⎪⎪⎪⎭⎫ ⎝⎛-=121611e ,⎪⎪⎪⎭⎫ ⎝⎛-=111312e ,⎪⎪⎪⎭⎫ ⎝⎛=101213e .即合所求.例4 已知⎪⎪⎪⎭⎫⎝⎛=1111α,求一组非零向量32,αα,使321,,ααα两两正交.解 32,αα应满足方程01=x Tα,即0321=++x x x .它的基础解系为⎪⎪⎪⎭⎫ ⎝⎛-=1011ξ,⎪⎪⎪⎭⎫ ⎝⎛-=1102ξ.把基础解系正交化,即合所求.亦即取 12ξα=,[][]1112123,,ξξξξξξα-=.于是得⎪⎪⎪⎭⎫ ⎝⎛-=1012α,⎪⎪⎪⎭⎫ ⎝⎛--=121213α.正交矩阵定义 1 .是阶方阵,并且(即),称为正交阵.2 .若是正交阵,则称 是正交变换.正交阵的充要条件:为正交阵的列(行)是两两正交的单位向量.为正交矩阵的充要条件是或证 设,是的列向量,则为正交阵是两两正交的单位向量.正交矩阵的等价定义:正交矩阵有下列基本性质: 设A,B 都是n 阶正交矩阵,则 (1)1±=A(2)*T 1A A A )与(即-也是正交矩阵(注:A 为正交能推出A 为可逆矩阵且T1A A =-,但反之不成立)(3)如果A,B 为同阶正交矩阵,则AB 也是正交矩阵.(4)实矩阵A 为正交矩阵,当且仅当A 的列(行)向量组为正交单位向量组. 利用上述的性质(4),可以比较方便的检验矩阵是否为正交矩阵. 正交变换定义 若P 为正交阵,则线性变换y=P x 称为正交变换.正交变换的性质:设是正交变换的系数矩阵,则,从而及.正交变换有下列性质(其中A为正交矩阵):(1)保内积性:若2211,AxyAxy==,则),(),(2121xxyy=;(2)保长度性:若Axy=,则||||xy=正交矩阵的判断例题5.4实对称矩阵的性质及正交相似对角化实对称矩阵有下列性质:性质1 实对称矩阵的特征值都是实数.性质2 实对称矩阵的属于不同特征值的特征向量必正交.即设λ1,λ2是实对称矩阵A的两个特征值,p1,p2是对应的特征向量,若λ1≠λ2则p1与p2正交.性质3 若λ为实对称矩阵A的k重特征值,则A的属于λ的线性无关特征向量正好有k个.定理设A为实对称矩阵,则必存在正交矩阵P,使得APPAPP T=-1为对角矩阵.求正交矩阵P,使得Λ=-APP1对角矩阵的方法:1)、求出A的全部特征值nλλλ,,21:由方程0||=-AEλ解得;2)、对于每一个),,2,1(,nii=λ,解齐次线性方程组0)(=-xAEiλ,找出基础解系siiippp,,,213)、将nppp,,,21正交化,单位化,得一组正交单位向量nηηη,,,21;4)、因为nλλλ,,21各不相同,因此所求的向量组是两两正交的单位向量组,其向量的总数为n,这组列向量就构成了正交矩阵Q。
第五章 特征值和特征向量、矩阵的对角化 扩展例题及求解
[例 1]设 A , B 是 n 阶方阵,且 R(A) R(B) n ,证明 A , B 有公共的特征值,有公共的
特征向量。 [分析]此类题型综合程度较高,主要根据已知条件推导出对证明有用的结论,需要对知识点 熟练掌握。
[证] R(A) R(B) n R(A) n , R(B) n AX 0 , BX 0 都有非零解。
i 1
i 1
a1
a2
n
a3
an
n
从而特征值 ai2 的特征向量为 knn ,( kn 0 )。 i 1
[例]6 证明:设 A 是 n 阶正交矩阵, 是 A 的特征值,则 1 。
[分析]本题要利用正交矩阵的性质来证明。要证 1 ,可证 1。 [证]设 是对应于 的特征向量,则
[例 8]设 A 为 3 阶方阵, 为 3 维向量, , A , A2 线性无关, A3 4A 3A2 ,
计算行列式 2A2 3E 。
[分析]这里根据已知条件,直接计算方阵的行列式比较困难,可以采取特征值和特征向量的
性质来计算,即设 n 阶方阵 A 的特征值为 1, 2, , n ,则 A 12 n 。
不妨设 , 分别为 AX 0 , BX 0 的非零解,则
A 0 , B 0
由特征值、特征向量的定义, 0 是 A , B 的特征值, , 分别为 A , B 对应于特征值 0
的特征向量。
要证有公共的特征向量,只要证明 AX 0 ,BX 0 有公共的非零解即可。事实上,AX 0 ,
乘 ( A 4E)1 得: A(A E) 0 ,即 A2 A 0 ,从而 , A , A2 线性相关,矛
第五章矩阵特征值计算
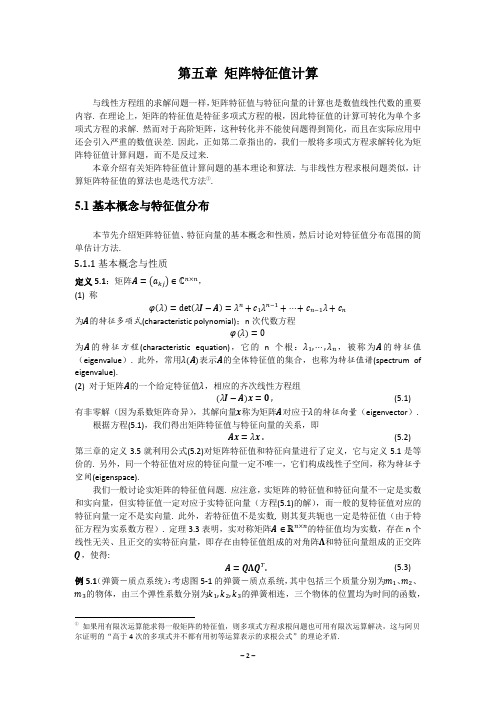
第五章矩阵特征值计算与线性方程组的求解问题一样,矩阵特征值与特征向量的计算也是数值线性代数的重要内容. 在理论上,矩阵的特征值是特征多项式方程的根,因此特征值的计算可转化为单个多项式方程的求解. 然而对于高阶矩阵,这种转化并不能使问题得到简化,而且在实际应用中还会引入严重的数值误差. 因此,正如第二章指出的,我们一般将多项式方程求解转化为矩阵特征值计算问题,而不是反过来.本章介绍有关矩阵特征值计算问题的基本理论和算法. 与非线性方程求根问题类似,计算矩阵特征值的算法也是迭代方法①.5.1基本概念与特征值分布本节先介绍矩阵特征值、特征向量的基本概念和性质,然后讨论对特征值分布范围的简单估计方法.5.1.1基本概念与性质定义5.1:矩阵A=(a kj)∈ℂn×n,(1) 称φ(λ)=det(λI−A)=λn+c1λn−1+⋯+c n−1λ+c n为A的特征多项式(characteristic polynomial);n次代数方程φ(λ)=0为A的特征方程(characteristic equation),它的n个根:λ1,⋯,λn,被称为A的特征值(eigenvalue). 此外,常用λ(A)表示A的全体特征值的集合,也称为特征值谱(spectrum of eigenvalue).(2) 对于矩阵A的一个给定特征值λ,相应的齐次线性方程组(λI−A)x=0 , (5.1)有非零解(因为系数矩阵奇异),其解向量x称为矩阵A对应于λ的特征向量(eigenvector).根据方程(5.1),我们得出矩阵特征值与特征向量的关系,即Ax=λx .(5.2)第三章的定义3.5就利用公式(5.2)对矩阵特征值和特征向量进行了定义,它与定义5.1是等价的. 另外,同一个特征值对应的特征向量一定不唯一,它们构成线性子空间,称为特征子空间(eigenspace).我们一般讨论实矩阵的特征值问题. 应注意,实矩阵的特征值和特征向量不一定是实数和实向量,但实特征值一定对应于实特征向量(方程(5.1)的解),而一般的复特征值对应的特征向量一定不是实向量. 此外,若特征值不是实数, 则其复共轭也一定是特征值(由于特征方程为实系数方程). 定理3.3表明,实对称矩阵A∈ℝn×n的特征值均为实数,存在n个线性无关、且正交的实特征向量,即存在由特征值组成的对角阵Λ和特征向量组成的正交阵Q,使得:A=QΛQ T.(5.3)例5.1(弹簧-质点系统):考虑图5-1的弹簧-质点系统,其中包括三个质量分别为m1、m2、m3的物体,由三个弹性系数分别为k1,k2,k3的弹簧相连,三个物体的位置均为时间的函数,①如果用有限次运算能求得一般矩阵的特征值,则多项式方程求根问题也可用有限次运算解决,这与阿贝尔证明的“高于4次的多项式并不都有用初等运算表示的求根公式”的理论矛盾.这里考查三个物体偏离平衡位置的位移,分别记为y 1(t), y 2(t), y 3(t). 因为物体在平衡状态所受的重力已经和弹簧伸长的弹力平衡,所以物体的加速度只和偏离平衡位置引起的弹簧伸长相关. 根据牛顿第二定律以及胡克定律(即弹簧的弹力与拉伸长度成正比)可列出如下微分方程组②: My ′′(t)+Ky(t)=0 ,其中y (t )=[y 1(t)y 2(t)y 3(t)]T ,M =[m 1000m 2000m 3],K =[k 1+k 2−k 20−k 2k 2+k 3−k 30−k 3k 3] . 在一般情况下,这个系统会以自然频率ω做谐波振动,而y 的通解包含如下的分量: y j (t )=x j e iωt ,(j =1,2,3)其中i =√−1,根据它可求解出振动的频率ω及振幅x j . 由这个式子可得出:y j ′′(t )=−ω2x j e iωt ,(j =1,2,3)代入微分方程,可得代数方程:−ω2Mx +Kx =0,或Ax =λx ,其中A =M −1K ,λ=ω2. 通过求解矩阵A 的特征值便可求出这个弹簧-质点系统的自然频率(有多个). 再结合初始条件可确定这三个位移函数,它们可能按某个自然频率振动(简正振动),也可能是若干个简正振动的线性叠加.例5.2(根据定义计算特征值、特征向量):求矩阵A =[5−1−131−14−21]的特征值和特征向量.[解]: 矩阵A 的特征方程为:det (λI −A )=|λ−511−3λ−11−42λ−1|=(λ−3)(λ−2)2=0故A 的特征值为λ1=3,λ2=2(二重特征值).当λ=λ1=3时,由(λI −A)x =0,得到方程[−211−321−422][x 1x 2x 3]=[000]它有无穷多个解,若假设x 1=1, 则求出解为x =[1,1,1]T ,记为x 1,则x 1是λ1对应的一个特征向量.当λ=λ2=2时,由(λI −A)x =0,得到方程[−311−311−421][x 1x 2x 3]=[000]它有无穷多个解,若假设x 1=1, 则求出解为x =[1,1,2]T ,记为x 2,则x 2是λ2对应的一个特② 本书第八章将介绍这种常微分方程组的数值求解方法.图5-1 弹簧-质点系统.征向量.下面概括地介绍有关矩阵特征值、特征向量的一些性质,它们可根据定义5.1,以及公式(5.2)加以证明.定理5.1:设λj (j =1,2,…,n)为n 阶矩阵A 的特征值,则(1) ∑λj n j=1=∑a jj n j=1=tr(A) ;(2) ∏λj n j=1=det(A) .这里tr(A)表示矩阵对角线上元素之和,称为矩阵的迹(trace ).从上述结论(2)也可以看出,非奇异矩阵特征值均不为0, 而0一定是奇异矩阵的特征值. 定理5.2:矩阵转置不改变特征值,即λ(A )=λ(A T ).定理5.3:若矩阵A 为对角阵或上(下)三角阵,则其对角线元素即为矩阵的特征值.定理5.4:若矩阵A 为分块对角阵,或分块上(下)三角阵,例如A =[A 11A 12⋯A 1m A 22⋯A 2m ⋱⋮A mm] , 其中每个对角块A jj 均为方阵,则矩阵A 的特征值为各对角块矩阵特征值的合并,即λ(A )=⋃λ(A jj )m j=1.定理5.5:矩阵的相似变换(similarity transformation)不改变特征值. 设矩阵A 和B 为相似矩阵,即存在非奇异矩阵X 使得B =X −1AX ,则(1) 矩阵A 和B 的特征值相等,即 λ(A )=λ(B ) ;(2) 若y 为B 的特征向量,则相应地,Xy 为A 的特征向量.通过相似变换并不总能把矩阵转化为对角阵,或者说矩阵A 并不总是可对角化的(diagonalizable). 下面给出特征值的代数重数、几何重数,和亏损矩阵的概念,以及几个定理..定义5.2: 设矩阵A ∈ℝn×n 有m 个(m n )不同的特征值λ̃1,⋯,λ̃m ,若λ̃j 是特征方程的n j 重根,则称n j 为λ̃j 的代数重数(algebraic multiplicity),并称λ̃j 的特征子空间(ℂn 的子空间)的维数为λ̃j 的几何重数(geometric multiplicity). 定理5.6:设矩阵A ∈ℝn×n 的m 个不同的特征值为λ̃1,⋯,λ̃m ,特征值λ̃j ,(j =1,⋯,m)的代数重数为n j ,几何重数为k j ,则(1) ∑n j m j=1=n ,且任一个特征值的几何重数不大于代数重数,即∀j ,n j ≥k j .(2) 不同特征值的特征向量线性无关,并且将所有特征子空间的∑k j m j=1个基(特征向量)放在一起,它们构成一组线性无关向量.(3) 若每个特征值的代数重数等于几何重数,则总共可得n 个线性无关的特征向量,它们是全空间ℂn 的基.定义5.3:若矩阵A ∈ℝn×n 的某个代数重数为k 的特征值对应的线性无关特征向量数目少于k (即几何重数小于代数重数),则称A 为亏损阵(defective matrix ),否则称其为非亏损阵(nondefective matrix ).定理5.7:设矩阵A ∈ℝn×n 可对角化,即存在非奇异矩阵X ∈ℂn×n 使得X −1AX =Λ,其中Λ∈ℂn×n 为对角阵, 的充要条件是A 为非亏损矩阵. 此时,Λ的对角线元素为矩阵A 的特征值,而矩阵X 的列向量为n 个线性无关的特征向量.定理5.7中方程的等价形式为A =XΛX −1, 它被称为特征值分解,也叫谱分解(spectrum decomposition). 特征值分解存在的充要条件是A 为非亏损矩阵. 但现实中还有很多矩阵是亏损矩阵,例如例5.2中的矩阵,它的特征值2的代数重数为2,而几何重数仅为1. 这种矩阵不能相似变换为对角阵,但存在下面的若当分解(Jordan decomposition).定理5.8:设矩阵A ∈ℝn×n , 存在非奇异矩阵X ∈ℂn×n 使得A =XJX −1,矩阵J 为形如[J 1⋱J p ]的分块对角阵(称为若当标准型),其中J k =[ λk 1λk ⋱⋱1λk ] 称为若当块,其对角线元素为矩阵A 的特征值. 设矩阵A 有m 个不同的特征值为λ̃1,⋯,λ̃m ,特征值λ̃j ,(j =1,⋯,m)的代数重数为n j ,几何重数为k j ,则p =∑k j m j=1, λ̃j 对应于k j 个若当块, 其阶数之和等于n j .在若当分解中,如果所有若当块都是1阶的,则J 为对角阵,这种分解就是特征值分解,相应的矩阵为非亏损阵. 若当分解是很有用的理论工具,利用它还可证明下面关于矩阵运算结果的特征值的定理.定理5.9:设λj (j =1,2,…,n)为n 阶矩阵A 的特征值,则(1) 矩阵cA, c 为常数, 的特征值为cλ1,cλ2,⋯,cλn .(2) 矩阵A +pI, p 为常数, 的特征值为λ1+p,λ2+p,⋯,λn +p.(3) 矩阵A k , k 为正整数, 的特征值为λ1k ,λ2k ,⋯,λn k .(4) 设p (t )为一多项式函数,则矩阵p (A )的特征值为p (λ1),p (λ2),⋯ ,p (λn ) .(5) 若A 为非奇异矩阵,则λj ≠0,(j =1,2,…,n), 且矩阵A −1的特征值为λ1−1,λ2−1,⋯,λn −1.5.1.2特征值分布范围的估计估计特征值的分布范围或它们的界,无论在理论上或实际应用上,都有重要意义. 比如,本书前面的内容曾涉及两个问题:(1). 计算矩阵的2-条件数:cond (A )2=√λmax (A T A)λmin (A T A) ;(2). 考察一阶定常迭代法x (k+1)=Bx (k)+f 的收敛性、收敛速度:收敛的判据是谱半径ρ(B)=max 1≤j≤n |λj (B)|<1 ; 收敛速度为R =−log 10ρ(B) .其中都需要对矩阵特征值分布范围的了解.上一章的定理4.4说明谱半径的大小不超过任何一种算子范数,即ρ(A )≤‖A ‖ ,这是关于特征值的上界的一个重要结论.下面先给出定义5.4,再介绍有关特征值的界的另一个重要结论.定义5.4:设A =(a kj )∈ℂn×n ,记r k =∑|a kj |n j=1j≠k ,(k =1,⋯,n),则集合D k ={z||z −a kk |≤r k ,z ∈ℂ},(k =1,⋯,n)在复平面为以a kk 为圆心、r k 为半径的圆盘,称为A 的Gerschgorin (格什戈林)圆盘.图5-2显示了一个3⨯3复矩阵的格什戈林圆盘.定理5.10 (圆盘定理):设A =(a kj )∈ℂn×n ,则:(1) A 的每一个特征值必属于A 的格什戈林圆盘之中,即对任一特征值λ必定存在k,1≤k ≤n ,使得:|λ−a kk |≤∑|a kj |nj=1j≠k .(5.4)图5-2 复坐标平面,以及3⨯3矩阵A 的格什戈林圆盘.用集合的关系来说明,这意味着λ(A)⊆⋃D k n k=1.(2) 若A 的格什戈林圆盘中有m 个组成一连通并集S ,且S 与余下的n −m 个圆盘分离,则S内恰好包含A 的m 个特征值(重特征值按重数计).对图5-2所示的例子,定理5.10的第(2)个结论的含义是:D 1中只包含一个特征值,而另外两个特征值在D 2,D 3的并集中. 下面对定理5.10的结论(1)进行证明,结论(2)的证明超出了本书的范围.[证明]: 设λ为A 的任一特征值,则有Ax =λx ,x 为非零向量. 设x 中第k 个分量最大,即|x k |=max 1≤j≤n|x j |>0 , 考虑方程(5.2)中第k 个方程:∑a kj x j nj=1=λx k , 将其中与x k 有关的项移到等号左边,其余到右边,再两边取模得:|λ−a kk ||x k |=|∑a kj x j n j=1j≠k |≤∑|a kj ||x j |n j=1j≠k ≤|x k |∑|a kj |nj=1j≠k .(5.5)最后一个不等式的推导利用了“x 中第k 个分量最大”的假设. 将不等式(5.5)除以|x k |,即得到(5.4)式,因此证明了定理 5.10的结论(1). 上述证明过程还说明,若某个特征向量的第k 个分量的模最大,则相应的特征值必定属于第k 个圆盘中.根据定理5.2,还可以按照矩阵的每一列元素定义n 个圆盘,对于它们定理5.10仍然成立. 下面的定理是圆盘定理的重要推论,其证明留给感兴趣的读者.定理5.11:设A ∈ℝn×n ,且A 的对角元均大于0,则(1) 若A 严格对角占优,则A 的特征值的实部都大于0.(2) 若A 为对角占优的对称矩阵,则A 一定是对称半正定矩阵,若同时A 非奇异,则A 为对称正定矩阵.例5.3 (圆盘定理的应用):试估计矩阵A =[41010−111−4]的特征值范围.[解]: 直接应用圆盘定理,该矩阵的三个圆盘如下:D 1: |λ−4|≤1, D 2: |λ|≤2, D 3: |λ+4|≤2.D 1与其他圆盘分离,则它仅含一个特征值,且必定为实数(若为虚数则其共轭也是特征值,这与D 1仅含一个特征值矛盾). 所以对矩阵特征值的范围的估计是:3≤λ1≤5,λ2,λ3∈D 2∪D 3 .再对矩阵A T 应用圆盘定理,则可以进一步优化上述结果. 矩阵A T 对应的三个圆盘为: D ’1: |λ−4|≤2, D ’2: |λ|≤2, D ’3: |λ+4|≤1.这说明D ’3中存在一个特征值,且为实数,它属于区间[-5, -3],经过综合分析可知三个特征值均为实数,它们的范围是:λ1∈[3,5],λ2∈[−2,2],λ3∈[−5,−3].事实上,使用Matlab 的eig 命令可求出矩阵A 的特征值为:4.2030, -0.4429, -3.7601.根据定理5.5,还可以对矩阵A 做简单的相似变换,例如取X 为对角阵,然后再应用圆盘定理估计特征值的范围.例5.4 (特征值范围的估计):选取适当的矩阵X ,应用定理5.5和5.10估计例5.3中矩阵的特征值范围.[解]: 取X−1=[100010000.9] , 则A 1=X −1AX =[41010−109⁄0.90.9−4]的特征值与A 的相同. 对A 1应用圆盘定理,得到三个分离的圆盘,它们分别包含一个实特征值,由此得到特征值的范围估计:λ1∈[3,5],λ2∈[−199,199],λ3∈[−5.8,−2.2]. 此外,还可进一步估计ρ(A)的范围,即3≤ρ(A)≤5.8 .上述例子表明,综合运用圆盘定理和矩阵特征值的性质(如定理5.2, 定理5.5),可对特征值的范围进行一定的估计. 对具体例子,可适当设置相似变换矩阵,尽可能让圆盘相互分离,从而提高估计的有效性.5.2幂法与反幂法幂法是一种计算矩阵最大的特征值及其对应特征向量的方法. 本节介绍幂法、反幂法以及加快幂法迭代收敛的技术.5.2.1幂法定义5.5:在矩阵A 的特征值中,模最大的特征值称为主特征值,也叫“第一特征值”,它对应的特征向量称为主特征向量.应注意的是,主特征值有可能不唯一,因为模相同的复数可以有很多. 例如模为5的特征值可能是5,−5,3+4i,3−4i , 等等. 另外,请注意谱半径和主特征值的区别.如果矩阵A 有唯一的主特征值,则一般通过幂法能方便地计算出主特征值及其对应的特征向量. 对于实矩阵,这个唯一的主特征值显然是实数,但不排除它是重特征值的情况. 幂法(power iteration)的计算过程是,首先任取一非零向量v 0∈ℝn ,再进行迭代计算:v k =Av k−1,(k =1,2,⋯)得到向量序列{v k },根据它即可求出主特征与特征向量. 下面用定理来说明.定理5.12: 设A ∈ℝn×n ,其主特征值唯一,记为λ1,且λ1的几何重数等于代数重数,则对于非零向量v 0∈ℝn ,v 0不与主特征值对应的特征向量正交,按迭代公式进行计算:v k =Av k−1,(k =1,2,⋯),存在如下极限等式:lim k→∞v k λ1k =x 1 , (5.6) lim k→∞(v k+1)j (v k )j =λ1 , (5.7)其中x 1为主特征向量,(v k )j 表示向量v k 的第j 个分量(k =1,2,⋯).[证明]: 为了推导简便,不妨设主特征值λ1不是重特征值,并且假设矩阵A 为非亏损矩阵. 设A 的n 个特征值按模从大到小排列为: |λ1|>|λ2|≥⋯≥|λn |,它们对应于一组线性无关的单位特征向量x ̂1,⋯,x ̂n . 向量v 0可写成这些特征向量的线性组合:v 0=α1x̂1+⋯+αn x ̂n 根据已知条件,α1≠0,则v k =Av k−1=A k v 0=α1λ1k x ̂1+α2λ2k x̂2+⋯+αn λn k x ̂n =λ1k [α1x ̂1+∑αj (λj λ1)kx ̂j n j=2] =λ1k (α1x̂1+εk ) 其中εk =∑αj (λj λ1)k x ̂j n j=2. 由于|λj λ1|<1,(j =2,…,n), 则 lim k→∞εk =0 ⟹lim k→∞v kλ1k =α1x̂1 . 由于特征向量放大、缩小任意倍数后仍是特征向量,设x 1=α1x̂1,则它是主特征对应的一个特征向量. 上式说明,随k 的增大, v k 越来越趋近于主特征值的对应的特征向量.设j 为1到n 之间的整数,且(v k )j ≠0,则(v k+1)j (v k )j =λ1(α1x ̂1+εk+1)j (α1x̂1+εk )j 由于lim k→∞εk =0,随k 的增大上式等号右边趋于一个常数: λ1. 这就证明了定理的结论.若矩阵A 为亏损矩阵,可利用矩阵的若当分解证明这个定理,这里略去. 在这种情况下,“主特征值的几何重数等于代数重数”这一条件很重要,例如,若A =[310030001] ,它的主特征值为3,但其几何重数为1,不满足条件. 对这个矩阵A 进行实验显示无法用幂法求出主特征值.关于定理5.12,再说明几点:● 当主特征值λ1为重特征值时,应要求其几何重数等于代数重数,此时特征子空间维数大于1,向量序列{v k λ1k ⁄}的收敛值是其特征子空间中的某一个基向量.● 公式(5.7)式的含义是相邻迭代向量分量的比值收敛到主特征值. 因此在实际计算时,可任意取j 的值,只需保证比值的分母不为零.● 证明中假设了α1≠0,在实际应用中往往随机选取v 0,由于存在舍入误差,它一般都能满足. 感兴趣的读者也可思考一下,若初始向量v 0恰好与主特征向量都正交,那么幂法中的迭代向量序列会有什么结果?直接使用幂法,还存在如下两方面问题:(1) 溢出:由于v k ≈λ1k x 1,则|λ1|>1时,实际计算v k 会出现上溢出(当k 很大时);|λ1|<1时,实际计算v k 会出现下溢出(当k 很大时).(2) 可能收敛速度很慢. 由于εk =∑αj (λj λ1)kx j n j=2, εk →0的速度取决于求和式中衰减最慢的因子|λ2λ1|,当|λ2λ1|≈1时,收敛很慢. 由此导致v k →λ1k α1x 1, (v k+1)j (v k )j →λ1的收敛速度都将很慢,严重影响计算的效率.下面采用规格化向量的技术防止溢出,导出实用的幂法. 关于加速收敛技术的讨论,见下一小节.定义 5.6:记max ̅̅̅̅̅̅(v )为向量v ∈ℝn 的绝对值最大的分量, max ̅̅̅̅̅̅(v )=v j ,其中j 满足|v j |=max 1≤k≤n |v k |, 若j 的值不唯一,则取最小的那个. 并且,称u =v/max ̅̅̅̅̅̅(v )为向量v 的规格化向量(normalized vector).例5.5(规格化向量):设v =[3,−5,0]T ,max ̅̅̅̅̅̅(v )=−5,对应的规格化向量为u =[−35,1,0]T .根据定义5.6,容易得出规格化向量的两条性质.定理5.13: 定义5.6中的规格化向量满足如下两条性质:(1) 若u 为规格化向量,则‖u ‖ =1,并且max ̅̅̅̅̅̅(u )=1.(2) 设向量v 1和v 2的规格化向量分别为u 1和u 2,若v 1=αv 2, 实数α≠0,则u 1= u 2.在幂法的每一步增加向量规格化的操作可解决溢出问题. 先看第一步,v 1=Av 0,此时计算v 1的规格化向量u 1=v 1max ̅̅̅̅̅̅(v 1)=Av 0max ̅̅̅̅̅̅(Av 0). 然后使用规格化向量计算v 2:v 2=Au 1=A 2v 0max ̅̅̅̅̅̅(Av 0), (5.8) 再进行向量规划化操作,u 2=v 2max ̅̅̅̅̅̅(v 2)=A 2v 0max ̅̅̅̅̅̅(A 2v 0). (5.9) 公式(5.9)的推导,利用了(5.8)式和定理5.13的结论(2). 依次类推,我们得到: { v k =Au k−1=A k v 0max ̅̅̅̅̅̅(A k−1v 0) u k =v k max ̅̅̅̅̅̅(v k )=A k v 0max ̅̅̅̅̅̅(A k v 0) , k =1,2,⋯. (5.10) 根据定理5.12的证明过程, A k v 0=λ1k [α1x ̂1+∑αj (λj λ1)k x ̂j n j=2] ⟹u k =A k v 0max ̅̅̅̅̅̅(A k v 0)=α1x ̂1+∑αj (λj λ1)k x ̂j n j=2max ̅̅̅̅̅̅(α1x ̂1+∑αj (λj λ1)k x ̂j n j=2)k→∞→ x 1max ̅̅̅̅̅̅(x 1) , 即u k 逐渐逼近规格化的主特征向量. 同理,v k =Au k−1=A k v 0max ̅̅̅̅̅̅(A k−1v 0)=λ1k [α1x ̂1+∑αj (λj λ1)k x ̂j n j=2]max ̅̅̅̅̅̅(λ1k−1[α1x ̂1+∑αj (λj λ1)k−1x̂j n j=2]) =λ1α1x ̂1+∑αj(λj λ1)kx ̂j n j=2max ̅̅̅̅̅̅(α1x ̂1+∑αj (λj λ1)k−1x ̂j n j=2) 因此,根据定理5.13的结论(1)有:lim k→∞v k=λ1x1max̅̅̅̅̅̅(x1)⟹limk→∞max̅̅̅̅̅̅(v k)=λ1.基于上述推导,我们得到如下定理,以及如算法5.1描述的实用幂法.定理5.14: 设A∈ℝn×n,其主特征值唯一(且几何重数等于代数重数),记为λ1,取任意非零初始向量v0=u0,它不与主特征值对应的特征向量正交,按迭代公式(5.10)进行计算,则lim k→∞u k=x1max̅̅̅̅̅̅(x1),(5.11)lim k→∞max̅̅̅̅̅̅(v k)=λ1 ,(5.12)其中x1为主特征向量.算法5.1:计算主特征值λ1和主特征向量x1的实用幂法输入:v,A; 输出:x1,λ1.u:=v;While不满足判停准则dov:=Au;λ1:=max̅̅̅̅̅̅(v); {主特征值近似值}u:=v/λ1; {规格化}Endx1:=u. {规格化的主特征向量}在算法5.1中,可根据相邻两步迭代得到的主特征值近似值之差来判断是否停止迭代. 每个迭代步的主要计算是算一次矩阵与向量乘法,若A为稀疏矩阵则可利用它的稀疏性提高计算效率. 实用的幂法保证了向量序列{v k},{u k}不溢出,并且向量v k的最大分量的极限就是主特征值.最后,针对幂法的适用范围再说明两点:(1). 若实矩阵A对称半正定或对称半负定,则其主特征值必唯一(而且是非亏损阵). 有时也可以估计特征值的分布范围,从而说明主特征值的唯一性. 只有满足此条件,才能保证幂法的收敛性.(2). 对一般的矩阵,幂法的迭代过程有可能不收敛,此时序列{u k}有可能包括多个收敛于不同向量的子序列,它趋向于成为多个特征向量的线性组合. 但是,一旦幂法的迭代过程收敛,向量序列的收敛值就一定是特征向量,并可求出相应的特征值.例5.6 (实用的幂法):用实用的幂法求如下矩阵的主特征值:A=[3113] ,[解]: 取初始向量为v0=u0=[01]T . 按算法5.1的迭代过程,计算结果列于表5-1中.表5-1 实用幂法的迭代计算过程从结果可以看出,在每次迭代步中做的规格化操作避免了分量的指数增大或缩小. 经过9步迭代,特征值max ̅̅̅̅̅̅(v k )已非常接近主特征值的准确值4,特征向量也非常接近[1 1]T .5.2.2加速收敛的方法 加速幂法迭代收敛过程的方法主要有两种:原点位移技术和瑞利商(Rayleigh quotient )加速. 下面做些简略的介绍.一. 原点位移技术原点位移技术,也叫原点平移技术,它利用定理5.9的结论(2),即矩阵A −pI 的特征值为A 的特征值减去p 的结果. 对矩阵B =A −pI 应用幂法有可能得到矩阵A 的某个特征值λj 和相应的特征向量. 要使原点位移达到理想的效果,首先要求λj −p 是B 的主特征值,其次还要使幂法尽快收敛,即比例|λ2(B)λj −p |要尽量小,这里的λ2(B)表示矩阵B 的(按模)第二大的特征值. 在某种情况下设置合适的p 值,矩阵A,B 可同时取到主特征值. 图5-3显示了这样一个例子,矩阵A 的特征值分布在阴影区域覆盖的实数轴上,λ1为其主特征值. 按图中所示选取的p 值,将使得λ1−p 是矩阵B =A −pI 的主特征值,并且显然有|λ2(B)λ1−p |<|λ2(A)λ1| . 此时用幂法计算B 的主特征值能更快地收敛,进而得到矩阵的A 的主特征值. 图5-3也解释了原点位移法名字的由来,即将原点(或虚数坐标轴)移到p 的位置上,原始矩阵A 的特征值分布变成了矩阵B 的特征值分布.采用原点位移技术后,执行幂法仅带来很少的额外运算,而且仍然能利用矩阵A 的稀疏性. 它的关键问题是,如何选择合适的参数p 以达到较好的效果?这依赖于具体矩阵的情况,以及对其特征值分布的了解. 在后面,我们还会看到原点位移技术的其他用途.二. 瑞利商加速首先给出瑞利商的定义,以及它与特征值的关系,然后介绍瑞利商加速技术.定义5.7:设A ∈ℝn×n ,且为对称矩阵,对任一非零向量x ≠0,称R (x )=〈Ax,x 〉〈x,x 〉为对应于向量x 的瑞利商(Rayleigh quotient ). 这里符号〈,〉代表向量内积.定理5.15:设A ∈ℝn×n ,且为对称矩阵,其n 个特征值依次为:λ1≥λ2≥⋯≥ λn ,则矩阵A 有关的瑞利商的上下确界分别为λ1和λn . 即∀x ≠0,λn ≤R (x )≤λ1,且当x 为λ1对应的特征向量时R (x )=λ1,当x 为λn 对应的特征向量时R (x )=λn .[证明]: 根据实对称矩阵的特点,即可正交对角化(定理3.3),设特征值λ1,λ2,⋯,λn 对应的单位特征向量为x 1,x 2,⋯,x n ,设x =∑αj x j n j=1,则〈x,x 〉=〈∑αj x j n j=1,∑αj x j n j=1〉=∑αj 2n j=1,而图5-3 原点位移技术示意图.。
第五章 矩阵的特征值与特征向量的计算
5.2 幂法及其MATLAB 程序5.2.2 幂法的MATLAB 程序用幂法计算矩阵A 的主特征值和对应的特征向量的MATLAB 主程序function [k,lambda,Vk,Wc]=mifa(A,V0,jd,max1)lambda=0;k=1;Wc =1; ,jd=jd*0.1;state=1; V=V0;while ((k<=max1)&(state==1))Vk=A*V; [m j]=max(abs(Vk)); mk=m;tzw=abs(lambda-mk); Vk=(1/mk)*Vk;Txw=norm(V-Vk); Wc=max(Txw,tzw); V=Vk;lambda=mk;state=0; if (Wc>jd)state=1;endk=k+1;Wc=Wc;endif (Wc<=jd)disp('请注意:迭代次数k,主特征值的近似值lambda,主特征向量的近似向量Vk,相邻两次迭代的误差Wc 如下:')elsedisp('请注意:迭代次数k 已经达到最大迭代次数max1,主特征值的迭代值lambda,主特征向量的迭代向量Vk,相邻两次迭代的误差Wc 如下:') endVk=V;k=k-1;Wc;例 5.2.2 用幂法计算下列矩阵的主特征值和对应的特征向量的近似向量,精度510-=ε.并把(1)和(2)输出的结果与例5.1.1中的结果进行比较.(1)⎪⎪⎭⎫ ⎝⎛-=4211A ; (2)⎪⎪⎪⎭⎫ ⎝⎛=633312321B ;(3)⎪⎪⎪⎭⎫ ⎝⎛--=1124111221C ;(4)⎪⎪⎪⎭⎫ ⎝⎛---=20101350144D . 解 (1)输入MATLAB 程序>>A=[1 -1;2 4]; V0=[1,1]';[k,lambda,Vk,Wc]=mifa(A,V0,0.00001,100),[V,D] = eig (A), Dzd=max(diag(D)), wuD= abs(Dzd- lambda), wuV=V(:,2)./Vk,运行后屏幕显示结果请注意:迭代次数k,主特征值的近似值lambda,主特征向量的近似向量Vk,相邻两次迭代的误差Wc 如下:k = lambda = Wc =33 3.804 8.4999e-007Vk = V = wuV =-0.432 -0.655 0.996 -0.2941.000 0.655 -0.992 -0.992Dzd = wuD =3 1.6435e-006由输出结果可看出,迭代33次,相邻两次迭代的误差W c ≈8.69 19e-007,矩阵A 的主特征值的近似值lambda ≈3.000 00和对应的特征向量的近似向量V k ≈(-0.500 00,1.00000T ), lambda 与例5.1.1中A 的最大特征值32=λ近似相等,绝对误差约为1.738 37e-006,47. V k 与特征向量X =T22k T )1,21(- )0(2≠k 的第1个分量的绝对误差约等于0,第2个分量的绝对值相同.由wuV 可以看出,2λ的特征向量V (:,2) 与V k 的对应分量的比值近似相等.因此,用程序mifa.m 计算的结果达到预先给定的精度510-=ε.(2) 输入MATLAB 程序>>B=[1 2 3;2 1 3;3 3 6]; V0=[1,1,1]';[k,lambda,Vk,Wc]=mifa(B,V0,0.00001,100), [V,D] = eig (B), Dzd=max(diag(D)), wuD= abs(Dzd- lambda), wuV=V(:,3)./Vk,运行后屏幕显示结果请注意:迭代次数k,主特征值的近似值lambda,主特征向量的近似向量Vk,相邻两次迭代的误差Wc 如下:k = lambda = Wc = Dzd = wuD =3 9 0 9 0Vk = wuV =0.000 0.7730.000 0.7731.000 0.773V =0.655 0.963 0.386-0.655 0.963 0.3860 -0.963 0.773(3) 输入MATLAB 程序>> C=[1 2 2;1 -1 1;4 -12 1];V0=[1,1,1]';[k,lambda,Vk,Wc]=mifa(C,V0,0.00001,100), [V,D] = eig (C), Dzd=max(diag(D)), wuD=abs(Dzd-lambda),Vzd=V(:,1),wuV=V(:,1)./Vk,运行后屏幕显示请注意:迭代次数k 已经达到最大迭代次数max1,主特征值的迭代值lambda,主特征向量的迭代向量Vk,相邻两次迭代的误差Wc 如下:k = lambda = Wc =100 0.910 2.119Dzd = wuD =1.001 0.091Vk= Vzd = wuV =0.993 0.329 0.3350.995 0.776 0.7781.000 -0.776 -0.776由输出结果可见,迭代次数k 已经达到最大迭代次数max 1=100,并且lambda 的相邻两次迭代的误差Wc ≈2.377 58>2,由wuV 可以看出,lambda 的特征向量V k 与真值Dzd 的特征向量V zd 对应分量的比值相差较大,所以迭代序列发散.实际上,实数矩阵C 的特征值的近似值为i ,i ,010*********.000321=-==λλλ ,并且对应的特征向量的近似向量分别为X T1=1k (0.329,0.776,-0.776)T ,X =T 22k (-0.001,-0.300-0.100i, 0.801-0.400i )T ,X =T33k ( -0.001, -0.300 + 0.100i,0.801 + 0.400i)T0,0(21≠≠k k , 03≠k 是常数).(4)输入MATLAB 程序>> D=[-4 14 0;-5 13 0;-1 0 2]; V0=[1,1,1]';[k,lambda,Vk,Wc]=mifa(D,V0,0.00001,100), [V,Dt] =eig (D), Dtzd=max(diag(Dt)), wuDt=abs(Dtzd-lambda),Vzd=V(:,2),wuV=V(:,2)./Vk,运行后屏幕显示结果请注意:迭代次数k,主特征值的近似值lambda,主特征向量的近似向量Vk,相邻两次迭代的误差Wc如下:k = lambda = Wc =19 6.528 6.1684e-006Dtzd = wuDt =6.000 6.0768e-006Vk = Vzd = wuV =0.564 0.564 0.5640.886 0.117 0.618-0.180 -0.391 0.3705.3 反幂法和位移反幂法及其MATLAB程序5.3.3 原点位移反幂法的MATLAB程序(一)原点位移反幂法的MATLAB主程序1用原点位移反幂法计算矩阵A的特征值和对应的特征向量的MATLAB主程序1 function [k,lambdan,Vk,Wc]=ydwyfmf(A,V0,jlamb,jd,max1)[n,n]=size(A); A1=A-jlamb*eye(n); jd= jd*0.1;RA1=det(A1);if RA1==0disp('请注意:因为A-aE的n阶行列式hl等于零,所以A-aE不能进行LU分解.')returnendlambda=0;if RA1~=0for p=1:nh(p)=det(A1(1:p, 1:p));endhl=h(1:n);for i=1:nif h(1,i)==0disp('请注意:因为A-aE的r阶主子式等于零,所以A-aE不能进行LU分解.')returnendendif h(1,i)~=0disp('请注意:因为A-aE的各阶主子式都不等于零,所以A-aE 能进行LU分解.')k=1;Wc =1;state=1; Vk=V0;while((k<=max1)&(state==1))[L U]=lu(A1); Yk=L\Vk;Vk=U\Yk; [mj]=max(abs(Vk));mk=m;Vk1=Vk/mk; Yk1=L\Vk1;Vk1=U\Yk1;[m j]=max(abs(Vk1));mk1=m;Vk2=(1/mk1)*Vk1;tzw1=abs((mk-mk1)/mk1);tzw2=abs(mk1-mk);Txw1=norm(Vk)-norm(Vk1);Txw2=(norm(Vk)-norm(Vk1))/norm(Vk1);Txw=min(Txw1,Txw2); tzw=min(tzw1,tzw2);Vk=Vk2;mk=mk1; Wc=max(Txw,tzw);Vk=Vk2;mk=mk1;state=0;if(Wc>jd)state=1;endk=k+1;%Vk=Vk2,mk=mk1,49. endif (Wc<=jd)disp('A-aE 的秩R(A-aE)和各阶顺序主子式值hl 、迭代次数k,按模最小特征值的近似值lambda,特征向量的近似向量Vk,相邻两次迭代的误差Wc 如下:')elsedisp('A-aE 的秩R(A-aE)和各阶顺序主子式值hl 、迭代次数k 已经达到最大迭代次数max1,按模最小特征值的迭代值lambda,特征向量的迭代向量Vk,相邻两次迭代的误差Wc 如下:')endhl,RA1endend[V,D]=eig(A,'nobalance'),Vk;k=k-1;Wc;lambdan=jlamb+1/mk1;例5.3.2 用原点位移反幂法的迭代公式(5.28),根据给定的下列矩阵的特征值n λ的初始值n λ~,计算与n λ对应的特征向量n X 的近似向量,精确到0.000 1. (1)⎪⎪⎪⎭⎫ ⎝⎛----210242011,2.0~2=λ;(2)⎪⎪⎭⎫ ⎝⎛-4211,001.2~2=λ;(3)⎪⎪⎪⎭⎫ ⎝⎛--3315358215211,8.26~3=λ.解 (1)输入MATLAB 程序>> A=[1 -1 0;-2 4 -2;0 -1 2];V0=[1,1,1]';[k,lambda,Vk,Wc]=ydwyfmf(A,V0,0.2,0.0001,10000)运行后屏幕显示结果 请注意:因为A-aE 的各阶主子式都不等于零,所以A-aE 能进行LU 分解.A-aE 的秩R(A-aE)和各阶顺序主子式值hl 、迭代次数k,按模最小特征值的近似值lambda,特征向量的近似向量Vk,相邻两次迭代的误差Wc 如下:k = lambda = Wc = hl =3 0.2384 1.0213e-007 0.8000 1.0400 0.2720Vk = V = D =1.0000 -0.2424 -1.0000 -0.5707 5.1249 0 00.7616 1.0000 -0.7616 0.3633 0 0.2384 00.4323 -0.3200 -0.4323 1.0000 0 0 1.6367(2)输入MATLAB 程序>> A=[1 -1;2 4];V0=[20,1]';[k,lambda,Vk,Wc]=ydwyfmf(A,V0,2.001,0.0001,100)运行后屏幕显示结果请注意:因为A-aE 的各阶主子式都不等于零,所以A-aE 能进行LU 分解.A-aE 的秩R(A-aE)和各阶顺序主子式值hl 、迭代次数k,按模最小特征值的近似值lambda,特征向量的近似向量Vk,相邻两次迭代的误差Wc 如下:k = lambda = Wc = hl =2 2.0020 5.1528e-007 -1.0010 -0.0010Vk = V = D =1.0000 -1.0000 0.5000 2 0-1.0000 1.0000 -1.0000 0 3(3)输入MATLAB 程序>> A=[-11 2 15;2 58 3;15 3 -3];V0=[1,1,-1]';[k,lambdan,Vk,Wc]=ydwyfmf(A,V0,8.26, 0.0001,100)运行后屏幕显示结果请注意:因为A-aE 的各阶主子式都不等于零,所以A-aE 能进行LU 分解.A-aE 的秩R(A-aE)和各阶顺序主子式值hl 、迭代次数k,按模最小特征值的近似值lambda,特征向量的近似向量Vk,相邻两次迭代的误差Wc 如下:k = lambdan= Wc = hl =2 8.2640 6.9304e-008 -19.2600 -961.9924 -6.1256 Vk = V = D =-0.7692 0.7928 0.6081 0.0416 -22.5249 0 00.0912 0.0030 -0.0721 0.9974 0 8.2640 0-1.0000 -0.6095 0.7906 0.0590 0 0 58.2609例 5.3.3 用原点位移反幂法的迭代公式(5.28),计算⎪⎪⎪⎭⎫ ⎝⎛-----=1026471725110A 的分别对应于特征值 1.001~11=≈λλ,.001 2~22=≈λλ, 001.4~33=≈λλ的特征向量1X ,2X ,3X 的近似向量,相邻迭代误差为0.001.将计算结果与精确特征向量比较. 解 (1)计算特征值 1.001~11=≈λλ对应的特征向量1X 的近似向量.输入MATLAB 程序>> A=[0 11 -5;-2 17 -7;-4 26 -10];V0=[1,1,1]';[k,lambda,Vk,Wc]= ydwyfmf(A,V0,1.001, 0.001,100),[V,D]=eig(A);Dzd=min(diag(D)), wuD= abs(Dzd- lambda),VD=V(:,1),wuV=V(:,1)./Vk,运行后屏幕显示结果请注意:因为A-aE 的各阶主子式都不等于零,所以A-aE 能进行L U 分解.A-aE 的秩R(A-aE)和各阶顺序主子式值hl 、迭代次数k,按模最小特征值的近似值lambda,特征向量的近似向量Vk,相邻两次迭代的误差Wc 如下:hl =-1.000 5.000 -0.000k = lambda = RA1 =5 1.000 -0.000Vk = VD = wuV =-0.000 -0.386 0.773-0.000 -0.386 0.773-1.000 -0.773 0.773Wc = Dzd = wuD =1.5562e-009 1.000 0.000从输出的结果可见,迭代5次,特征向量1X 的近似向量1~X 的相邻两次迭代的误差Wc ≈1.379 e-009,由wuV 可以看出,1~X = Vk 与VD 的对应分量的比值相等.特征值1λ的近似值lambda ≈1.002与初始值=1~λ 1.001的绝对误差为0.001,而与 1λ的绝对误差为0.002,其中 =1X T )000000000001.000 , 000000000000.500- , 000000000000.500( -, =1~X T )000000000001.000 , 000000000000.500- , 000000000000.500(-. (2)计算特征值.001 2~22=≈λλ对应特征向量2X 的近似向量.输入MATLAB 程序>> A=[0 11 -5;-2 17 -7;-4 26 -10];V0=[1,1,1]';[k,lambda,Vk,Wc]=ydwyfmf(A,V0,2.001, 0.001,100) ,[V,D]=eig(A); WD=lambda-D(2,2),VD=V(:,2),wuV=V(:,2)./Vk, 运行后屏幕显示结果请注意:因为A-aE 的各阶主子式都不等于零,所以A-aE 能进行L U 分解.A-aE 的秩R(A-aE)和各阶顺序主子式值hl 、迭代次数k,按模最小特征值的近似值lambda,特征向量的近似向量Vk,相邻两次迭代的误差Wc 如下:hl =-2.000 -8.000 0.000k = Wc = lambda = WD =2 3.2120e-007 2.016 0.016Vk = VD = wuV =-0.999 0.599 -0.401-0.999 0.198 -0.398-1.000 0.397 -0.39751. 从输出的结果可见,迭代2次,特征向量2X 的近似向量2X 的相邻两次迭代的误差Wc ≈3.131e-007,2~X 与2X 的对应分量的比值近似相等.特征值2λ的近似值lambda ≈2.002与初始值=2~λ 2.001的绝对误差约为0.001,而lambda 与2λ的绝对误差约为0.002,其中 =2~X T )00000000000000.1,99999999999499.0,99999999999249.0(---, =2X T ) 000000000001.000- ,000000000000.500- ,99999999999-0.249( . (3)计算特征值 001.4~33=≈λλ对应特征向量3X 的近似向量.输入MATLAB 程序>> A=[0 11 -5;-2 17 -7;-4 26 -10];V0=[1,1,1]';[k,lambda,Vk,Wc]=ydwyfmf(A,V0,4.001, 0.001,100)[V,D]=eig(A);WD=lambda-max(diag(D)),VD=V(:,3),wuV=V(:,3)./Vk,运行后屏幕显示结果请注意:因为A-aE 的各阶主子式都不等于零,所以A-aE 能进行L U 分解.A-aE 的秩R(A-aE)和各阶顺序主子式值hl 、迭代次数k,按模最小特征值的近似值lambda,特征向量的近似向量Vk,相邻两次迭代的误差Wc 如下:hl =-4.000 -30.000 -0.999k = lambda = Wc = WD =2 4.990 1.4842e-007 0.990Vk = VD = wuV =0.001 -0.153 -0.3800.001 -0.229 -0.3811.000 -0.381 -0.381从输出的结果可见,迭代2次,特征向量3X 的近似向量3~X 的相邻两次迭代的误差Wc ≈1.996e-007,3~X 与3X 的对应分量的比值近似相等.特征值3λ的近似值 4.001~4.0022=≈λ与初始值lambda 的绝对误差近似为001.0,而lambda 与3λ的绝对误差约为0.002,其中 =3X (-0.400 000 000 000 00,-0.600 000 000 000 00,-1.000 000 000 000 00T ), =3~X T )000000000001.000 ,100000000000.600 ,10000000000.400(.(二)原点位移反幂法的MATLAB 主程序2用原点位移反幂法计算矩阵A 的特征值和对应的特征向量的MATLAB 主程序2function [k,lambdan,Vk,Wc]=wfmifa1(A,V0,jlamb,jd,max1)[n,n]=size(A); jd= jd*0.1;A1=A-jlamb*eye(n);nA1=inv(A1); lambda1=0;k=1;Wc =1;state=1; U=V0;while ((k<=max1)&(state==1))Vk=A1\U; [m j]=max(abs(Vk)); mk=m; Vk=(1/mk)*Vk;Vk1=A1\Vk;[m1 j]=max(abs(Vk1)); mk1=m1,Vk1=(1/mk1)*Vk1;U=Vk1,Txw=(norm(Vk1)-norm(Vk))/norm(Vk1);tzw=abs((lambda1-mk1)/mk1);Wc=max(Txw,tzw); lambda1=mk1;state=0;if (Wc>jd)state=1;endk=k+1;endif (Wc<=jd)disp('请注意迭代次数k,特征值的近似值lambda,对应的特征向量的近似向量Vk,相邻两次迭代的误差Wc 如下:')elsedisp('请注意迭代次数k 已经达到最大迭代次数max1, 特征值的近似值lambda,对应的特征向量的近似向量Vk,相邻两次迭代的误差Wc 如下:') end[V,D] =eig(A,'nobalance'),Vk=U;k=k-1;Wc;lambdan=jlamb+1/mk;例5.3.4 用原点位移反幂法的迭代公式(5.27),计算例题5.3.3,并且将这两个例题的计算结果进行比较.再用两种原点位移反幂法的MATLAB 主程序,求979999999990.999~1=λ对应的特征向量. 解 (1)计算特征值 1.001~11=≈λλ对应特征向量1X 的近似向量.输入MATLAB 程序>> A=[0 11 -5;-2 17 -7;-4 26 -10];V0=[1,1,1]';[k,lambda,Vk,Wc]=wfmifa1(A,V0,1.001,0.001,100)运行后屏幕显示结果请注意迭代次数k,特征值的近似值lambda,对应的特征向量的近似向量Vk,相邻两次迭代的误差Wc 如下:k = lambda = Wc =5 1.138 1.6924e-006Vk’ = -0.000 -0.000 -1.000同理可得,另外与两个特征值对应的特征向量.(2)再用两种原点位移反幂法的MATLAB 主程序,求979999999990.999~1=λ对应的特征向量.输入MATLAB 程序>> A=[0 11 -5;-2 17 -7;-4 26 -10];V0=[1,1,1]';[k,lambda,Vk,Wc]=ydwyfmf(A,V0,0.997,0.001,100)运行后屏幕显示结果请注意:因为A-aE 的各阶主子式都不等于零,所以A-aE 能进行LU 分解.A-aE 的秩R(A-aE)和各阶顺序主子式值hl 、迭代次数k,按模最小特征值的近似值lambda,特征向量的近似向量Vk,相邻两次迭代的误差Wc 如下:hl =-0.997 6.045 0.010RA1 = 1.9192e-013 k = 2 lambda = 1.000输入MATLAB 程序>> A=[0 11 -5;-2 17 -7;-4 26 -10];V0=[1,1,1]';[k,lambda,Vk,Wc]=wfmifa1(A,V0, 0.997,0.001,100)运行后屏幕显示结果请注意迭代次数k,特征值的近似值lambda,对应的特征向量的近似向量Vk,相邻两次迭代的误差Wc 如下:k = 3 lambda = 1.000 Wc =5.7640e-0165.4 雅可比(Jacobi)方法及其MATLAB 程序5.4.3 雅可比方法的MATLAB 程序 Vk = 0.000 0.000 1.000 Wc = 4.6759e-013 Vk =0.0000.0001.00053. 用雅可比方法计算对称矩阵A 的特征值和对应的特征向量的MATLAB 主程序function [k,Bk,V,D,Wc]=jacobite(A,jd,max1)[n,n]=size(A);Vk=eye(n);Bk=A;state=1;k=0;P0=eye(n); Aij=abs(Bk-diag(diag(Bk)));[m1 i]=max(Aij);[m2 j]=max(m1);i=i(j);while ((k<=max1)&(state==1))k=k+1,aij=abs(Bk-diag(diag(Bk)));[m1 i]=max(abs(aij));[m2 j]=max(m1);i=i(j),j,Aij=(Bk-diag(diag(Bk)));mk=m2*sign(Aij(i,j)),Wc=m2,Dk=diag(diag(Bk));Pk=P0;c=(Bk(j,j)-Bk(i,i))/(2*Bk(i,j)),t=sign(c)/(abs(c)+sqrt(1+c^2)),pii=1/( sqrt(1+t^2)), pij=t/( sqrt(1+t^2)),Pk(i,i)=pii;Pk(i,j)=pij;Pk(j,j)=pii; Pk(j,i)=-pij;Pk,B1=Pk'*Bk;B2=B1*Pk; Vk=Vk*Pk,Bk=B2,if (Wc>jd)state=1;elsereturnendPk;Vk;Bk=B2;Wc;endif (k>max1)disp('请注意迭代次数k 已经达到最大迭代次数max1,迭代次数k,对称矩阵Bk,以特征向量为列向量的矩阵V,特征值为对角元的对角矩阵D 如下:')elsedisp('请注意迭代次数k,对称矩阵Bk,以特征向量为列向量的矩阵V,特征值为对角元的对角矩阵D 如下:')endWc;k=k; V=Vk;Bk=B2;D=diag(diag(Bk));[V1,D1]=eig(A,'nobalance')例5.4.2 用雅可比方法的MATLAB 程序计算矩阵⎪⎪⎪⎪⎪⎭⎫ ⎝⎛----=12101152302756135612A 的特征值i λ和对应的特征向量i X (4,3,2,1=i ).解 (1)保存名为jacobite.m 为M 文件;(2)输入MATLAB 程序>> A=[12 -56 3 -1;-56 7 2 0;3 2 5 1;-1 0 1 12];[k,B,V,D,Wc]=jacobite(A,0.001,100)(3)运行后屏幕显示如下:k = i = j = mk = Wc =1 2 1 -56 56c = t =-0.286 -0.972pii = pij =0.843 -0.510Pk =0.843 0.510 0 0-0.510 0.843 0 00 0 1.000 00 0 0 1.000Vk =0.843 0.510 0 0-0.510 0.843 0 00 0 1.000 00 0 0 1.000Bk =65.456 0 0.509 -0.843-0.001 -46.456 3.217 -0.5100.509 3.217 5.000 1.000-0.843 -0.510 1.000 12.000k =i = j = mk = Wc =2 3 2 3.217 3.217c = t =-7.824 -0.129pii = pij =0.446 -0.592Pk =1.000 0 0 00 0.446 0.592 00 -0.592 0.446 00 0 0 1.000 Vk =0.843 0.035 0.127 0-0.510 0.581 0.449 00 -0.592 0.446 00 0 0 1.000 Bk =65.456 -0.092 0.672 -0.843-0.093 -46.285 0 -0.6270.672 0.000 5.829 0.318-0.843 -0.627 0.318 12.000k = i = j = mk = Wc =3 4 3 0.318 0.318c = t =-3.213 -0.116pii = pij =0.324 -0.460Pk =1.000 0 0 00 1.000 0 00 0 0.324 0.4600 0 -0.460 0.324Vk =0.843 0.035 0.032 0.403-0.510 0.581 0.712 0.1430 -0.592 0.096 0.8420 0 -0.460 0.324Bk =65.456 -0.092 0.061 -0.628-0.093 -46.285 0.562 -0.8800.061 0.562 5.532 -0.000-0.628 -0.880 -0.000 12.297k =i = j = mk = Wc =4 1 3 0.061 0.061c = t =-34.430 -0.914pii = pij =0.186 -0.877Pk =0.186 0 -0.877 00 1.000 0 00.877 0 0.186 00 0 0 1.000 Vk =0.465 0.035 0.062 0.403-0.280 0.581 0.080 0.1430.712 -0.592 0.105 0.842-0.214 0 -0.206 0.324Bk =65.633 -0.808 -0.000 -0.964-0.809 -46.285 0.177 -0.880-0.000 0.177 5.356 0.823-0.964 -0.880 0.823 12.297k = i = j = mk = Wc =5 4 2 -0.880 0.880c = t =39.084 0.264pii = pij =0.114 0.836Pk =1.000 0 0 00 0.114 0 -0.8360 0 1.000 00 0.836 0 0.114Vk =0.465 0.603 0.062 -0.628-0.280 0.160 0.080 -0.5250.712 -0.220 0.105 0.737-0.214 0.032 -0.206 0.964Bk =65.633 -0.679 -0.000 -0.674-0.680 -46.078 0.590 0.000-0.000 0.590 5.356 0.860-0.674 0.000 0.860 12.090k =i = j = mk = Wc =6 4 1 -0.674 0.674c = t =-43.409 -0.503pii = pij =0.402 -0.366Pk =0.402 0 0 0.3660 1.000 0 00 0 1.000 0-0.366 0 0 0.402Vk =0.899 0.603 0.062 0.595-0.777 0.160 0.080 -0.2940.931 -0.220 0.105 0.404-0.145 0.032 -0.206 0.500Bk =65.122 -0.392 -0.377 -0.000-0.393 -46.078 0.590 -0.883-0.377 0.590 5.356 0.150-0.000 -0.883 0.150 12.603k =i = j = mk = Wc =7 3 2 0.590 0.590c = t =-2.9764e+002 -0.240pii = pij =0.167 -0.616Pk =1.000 0 0 00 0.167 0.616 00 -0.616 0.167 00 0 0 1.000…………………………………………………………………………请注意迭代次数k,对称矩阵Bk,以特征向量为列向量的矩阵V,特征值为对角元的对角矩阵D 如下:V1 =0.497 -0.484 0.431 -0.4500.300 -0.737 -0.977 0.337-0.277 -0.472 0.471 -0.2250.193 0.200 0.219 0.899D1 =-46.736 0 0 00 5.727 0 00 0 12.702 00 0 0 65.307k =1055.B =65.945 0.175 -0.566 0.8360.175 -46.739 0.984 0.000-0.566 0.984 5.090 -0.7370.836 -0.000 -0.737 12.704V =0.507 0.617 0.689 0.487-0.201 0.816 0.570 -0.0620.107 -0.977 0.379 0.122-0.898 0.755 -0.946 0.520D =65.945 0 0 00 -46.739 0 00 0 5.090 00 0 0 12.704Wc =6.7158e-0045.5 豪斯霍尔德(Householder)方法及其MATLAB程序5.5.1 豪斯霍尔德方法及其MATLAB程序求初等反射矩阵P,使得PX的第一个分量以外的其余的分量都为零的MATLAB主程序function [xigema,rou,miou,P,PX]=Householder(X)n=size(X);nX=norm(X,2);xigema=nX*sign(X(1));rou=xigema*(xigema+X(1));miou=[xigema,zeros(1,n-1)]'+X,E=eye(n,n); C=2*miou*(miou)';P=E-C/(norm(miou,2)^2); PX=P*X;例5.5.1设向量=X()T1,2,2,确定一个初等反射矩阵P,使得PX的后两个分量为零.解输入MATLAB程序>> X=[2 2 1]'; [xigema,rou,miou,P,PX]=Householder(X)运行后屏幕显示结果P = PX =-0.6667 -0.6667 -0.3333 -3.0000-0.6667 0.7333 -0.1333 0.0000-0.3333 -0.1333 0.9333 0.00005.5.2 矩阵约化为上豪斯霍尔德矩阵及其MATLAB程序用豪斯霍尔德变换将n阶矩阵A规约成上豪斯霍尔德矩阵的MATLAB主程序function [k,Sk,uk,ck,Pk,Uk,Ak]=Householdrer1(A)n=size(A); Ak=A;for k=1:n-2k,Sk=norm(Ak(k+1:n,k))*sign(Ak(k+1,k)),uk= Ak(k+1:n,k)+ Sk*eye(n-k,1),ck=(norm(uk,2)^2)/2,Pk= eye(n-k,n-k)-uk*uk'/ck,Uk=[eye(k,k),zeros(k,n-k);zeros(n-k, k),Pk],A1=Uk*Ak;Ak=A1,end例5.5.3用初等反射矩阵正交相似约化实矩阵A为上豪斯霍尔德矩阵.其中57.⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛=34 19- 37 78- 41- 31 11 72- 98 10.2- 78- 32-94- 21 12 1 01- 63- 72 1 5 2 3 17- 32 0 2 7 56- 51- 17 12- 34 52- 12A .解 输入MATLAB 程序>> A=[12 -52 34 -12 17 -51;-56 7 2 0 32 -17;3 2 5 1 72 -63;-10 1 12 21 -94;-32 -78 -10.2 98 -72 11;31 -41 -78 37 -19 34]; [k,Sk,uk,ck,Pk,Uk,Ak]=Householdrer1(A) 运行后屏幕显示结果k = Sk = ck =1 -71.6310 9.1423e+003 uk = Pk =-127.6310 -0.7818 0.0419 -0.0140 -0.4467 0.4328 3.0000 0.0419 0.9990 0.0003 0.0105 -0.0102 -1.0000 -0.0140 0.0003 0.9999 -0.0035 0.0034 -32.0000 -0.4467 0.0105 -0.0035 0.8880 0.1085 31.0000 0.4328 -0.0102 0.0034 0.1085 0.8949 Uk =1.0000 0 0 0 0 0 0 -0.7818 0.0419 -0.0140 -0.4467 0.4328 0 0.0419 0.9990 0.0003 0.0105 -0.0102 0 -0.0140 0.0003 0.9999 -0.0035 0.0034 0 -0.4467 0.0105 -0.0035 0.8880 0.1085 0 0.4328 -0.0102 0.0034 0.1085 0.8949 Ak =12.0000 -52.0000 34.0000 -12.0000 17.0000 -51.0000 71.6310 11.7128 -30.5678 -27.8930 1.6473 21.7643 0.0000 1.8892 5.7655 1.6556 72.7134 -63.9112 -0.0000 0.0369 0.7448 11.7815 20.7622 -93.6963 -0.0000 -76.8184 -18.3655 91.0066 -79.6101 20.7191 0.0000 -42.1447 -70.0897 43.7749 -11.6277 24.5846 k = Sk = ck =2 87.6402 7.8464e+003 uk = Pk =89.5295 -0.0216 -0.0004 0.8765 0.4809 0.0369 -0.0004 1.0000 0.0004 0.0002 -76.8184 0.8765 0.0004 0.2479 -0.4126 -42.1447 0.4809 0.0002 -0.4126 0.7736 Uk =1.0000 0 0 0 0 0 0 1.0000 0 0 0 0 0 0 -0.0216 -0.0004 0.8765 0.4809 0 0 -0.0004 1.0000 0.0004 0.0002 0 0 0.8765 0.0004 0.2479 -0.4126 0 0 0.4809 0.0002 -0.4126 0.7736 Ak =12.0000 -52.0000 34.0000 -12.0000 17.0000 -51.0000 71.6310 11.7128 -30.5678 -27.8930 1.6473 21.7643 -0.0000 -87.6402 -49.9272 100.7790 -76.9476 31.4002 -0.0000 -0.0000 0.7219 11.8223 20.7005 -93.6570 -0.0000 0.0000 29.4202 5.9564 48.8026 -61.0603 0.0000 0.0000 -43.8731 -2.8860 58.8230 -20.2818 ………………………………………………………………………… k = Sk = ck =4 -12.2088 195.0398uk = Pk =-15.9753 -0.3085 0.9512 11.6133 0.9512 0.3085 Uk =1.0000 0 0 0 0 0 0 1.0000 0 0 0 0 0 0 1.0000 0 0 0 0 0 0 1.0000 0 0 0 0 0 0 -0.3085 0.9512 0 0 0 0 0.9512 0.3085 Ak =12.0000 -52.0000 34.0000 -12.0000 17.0000 -51.0000 71.6310 11.7128 -30.5678 -27.8930 1.6473 21.7643 -0.0000 -87.6402 -49.9272 100.7790 -76.9476 31.4002 0.0000 -0.0000 -52.8292 -5.8754 21.3902 18.4403 0.0000 0.0000 0.0000 12.2088 40.2435 -106.8134 0.0000 0.0000 -0.0000 0.0000 64.7555 -34.09095.5.3 实对称矩阵的三对角化及其MATLAB 程序 将n 阶实对称矩阵A 规约成三对角形式的MATLAB 主程序function T=house(A) [n,n]=size(A); for k=1:n-2s=norm(A(k+1:n,k),2); if (A(k+1,k)<0) s=-s; endr=sqrt(2*s*(A(k+1,k)+s)); U(1:k)=zeros(1,k);U(k+1)=(A(k+1,k)+s)/r; U(k+2:n)=A(k+2:n,k)'/r; V(1:k)=zeros(1,k);V(k+1:n)=A(k+1:n,k+1:n)*U(k+1:n)'; C=U(k+1:n)*V(k+1:n)'; P(1:k)=zeros(1,k);P(k+1:n)=V(k+1:n)-C*U(k+1:n); A(k+2:n,k)=zeros(n-k-1,1); A(k,k+2:n)=zeros(1,n-k-1); A(k+1,k)=-s; A(k,k+1)=-s;A(k+1:n,k+1:n)=A(k+1:n,k+1:n)-2*U(k+1:n)'*P(k+1:n)-2*P(k+1:n)'*U(k+1:n);end T=A;例5.5.4 用初等反射矩阵正交相似约化实对称矩阵A 为三对角矩阵.其中⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛------------------=5261215121416134237299021237312611451721253233219612371564901435612A 解 输入MATLAB 程序59.>> A=[12 -56 3 -14 -90 -4;-56 71 23 61 -9 -21;3 23 53 12 -7251;-14 61 12 73 23 21;-90 -9 -72 23 -34 -61;-41 -21 51 21 -61 -52];T=house(A)运行后屏幕显示结果T =12.0000 114.5513 0 0 0 0 114.5513 -43.2395 -108.2763 0 0 00 -108.2763 49.7411 -22.7766 0 0 0 0 -22.7766 40.2476 -89.1355 0 0 0 0 -89.1355 44.9606 39.3090 0 0 0 0 39.3090 19.29025.6 QR 方法及其MATLAB 程序5.6.5 最末元位移QR 法计算实对称矩阵特征值及其MATLAB 程序 用最末元位移QR 方法求实对称矩阵A 全部特征值的MATLAB 主程序function tzg=qr4(A,t,max1)[n,n]=size(A); k=0;Ak=A;tzg=zeros(n); state=1; for i=1:n;while ((k<=max1)&(state==1)&(n>1))b1=abs(Ak(n,n-1)); b2=abs(Ak(n,n));b3=abs(Ak(n-1,n-1));b4=min(b2, b3); jd=10^(-t); jd1=jd*b4; if (b1>=jd1)sk=Ak(n,n); Bk=Ak-sk*eye(n); [Qk,Rk]=qr(Bk);At=Rk*Qk+sk*eye(n); k=k+1;tzgk=Ak(n,n);disp('请注意:下面的i 表示求第i 个特征值,k 是迭代次数,sk 是原点位移量,')disp(' Bk=Ak-sk*eye(n),Qk 和Rk 是Bk 的QR 分解,At=Rk*Qk+sk*eye(n)迭代矩阵:')i,state=1;k,sk,Bk,Qk,Rk,At,Ak=At; elsedisp('请注意:i 表示求第i 个特征值,tzgk 是矩阵A 的特征值的近似值,k 是迭代次数,')disp(' 下面的矩阵B 是m 阶矩阵At 的(m-1)阶主子矩阵,即At 降一阶.')i,tzgk=Ak(n,n),tzg(n,1)=tzgk;k=k,sk,Ak;B=Ak(1:n-1,1:n-1), Ak=B;n=n-1;state==1; i=i+1; end end endtzg(1,1)=Ak;tzg=sort(tzg(:,1));tzgk=Akdisp('请注意:n 阶实对称矩阵A 的全部真特征值lamoda 和至少含t个有效数字的近似特征值tzg 如下:')lamoda=sort(eig(A))例5.6.5 用最末元位移QR 方法求下列实对称矩阵的全部近似特征值,并将计算结果与A 全部真特征值比较.其中,2 1 1 1 13 1 21 1 4- 212 2 5)1(⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=A 精度为=ε510-;,52612151214161342372990212373126114517212532332196123715641901435612)2(⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛------------------=A 精度为=ε410-.解 (1)首先保存用最末元位移QR 方法求实对称矩阵A 全部特征值的MATLAB 主程序为M 文件,取名为qr4.m.在MATLAB 工作窗口输入程序>> A=[5 2 2 1;2 -4 1 1;2 1 3 1;1 1 1 2]; tzg=qr4(A,5,100)运行后屏幕显示结果请注意:下面的i 表示求第i 个特征值,k 是迭代次数,sk 是原点位移量,Bk=Ak-sk*eye(n),Qk 和Rk 是Bk 的QR 分解,At=Rk*Qk+sk*eye(n)迭代矩阵: i = 1 k = 1 sk = 2 Bk =3 2 2 1 2 -6 1 1 2 1 1 1 1 1 1 0 Qk =-0.655 0.317 0.490 -0.963-0.103 -0.718 0.245 0 -0.103 0.169 -0.448 0.963 -0.552 0.148 0.937 0.963 Rk =-4.929 0.655 -2.067 -1.8610 6.256 0.232 -0.2320 0 0.713 -0.7130 0 0 0.000 At =6.778 -3.069 -0.125 0.000 -3.069 -3.545 0.127 0.000 -0.125 0.127 1.767 0.000 -0.000 0.000 0.000 2.000请注意:i 表示求第i 个特征值,tzgk 是矩阵A 的特征值的近似值,k 是迭代次数, 下面的矩阵B 是m 阶矩阵At 的(m-1)阶主子矩阵,即At 降一阶. i = 1 tzgk = 2.000 k = 1 sk = 2 B =6.778 -3.069 -0.125 -3.069 -3.545 0.127 -0.125 0.127 1.767请注意:下面的i 表示求第i 个特征值,k 是迭代次数,sk 是原点位移量,Bk=Ak-sk*eye(n),Qk 和Rk 是Bk 的QR 分解,At=Rk*Qk+sk*eye(n)迭代矩阵: i = 2 k = 2 sk =1.767 Bk =4.011 -3.069 -0.125 -3.069 -5.312 0.127-0.125 0.127 0Qk =-0.929 -0.187 0.6770.289 -0.679 -0.7300.744 0.940 0.586Rk =-5.247 -0.739 0.6190 5.920 0.2420 0 -0.170At =6.691 3.840 -0.9853.840 -3.421 -0.472-0.985 -0.472 1.730请注意:i表示求第i个特征值,tzgk是矩阵A的特征值的近似值,k是迭代次数,下面的矩阵B是m阶矩阵At的(m-1)阶主子矩阵,即At降一阶.i =2tzgk =1.730k =2sk =1.767B =6.691 3.8403.840 -3.421请注意:下面的i表示求第i个特征值,k是迭代次数,sk是原点位移量,Bk=Ak-sk*eye(n),Qk和Rk是Bk的QR分解,At=Rk*Qk+sk*eye(n)迭代矩阵:i =3k =3sk =-3.421Bk =9.112 3.8403.840 0Qk =-0.348 -0.629-0.629 0.348Rk =-10.815 -3.9690 -0.199At =7.385 0.0000.000 -4.115请注意:下面的i表示求第i个特征值,k是迭代次数,sk是原点位移量,Bk=Ak-sk*eye(n),Qk和Rk是Bk的QR分解,At=Rk*Qk+sk*eye(n)迭代矩阵:i =3k =4sk =-4.115Bk =11.500 0.0000.000 0Qk =-0.784 -0.063-0.063 0.784Rk =-11.838 -0.5730 -0.263At =7.907 0.6920.692 -4.637请注意:下面的i表示求第i个特征值,k是迭代次数,sk是原点位移量,Bk=Ak-sk*eye(n),Qk和Rk是Bk的QR分解,At=Rk*Qk+sk*eye(n)迭代矩阵:61.i =3k =5sk =-4.637Bk =11.544 0.6920.692 0Qk =-0.678 -0.166-0.166 0.678Rk =-11.661 -0.6900 -0.235At =7.142 0.0050.005 -4.872请注意:i表示求第i个特征值,tzgk是矩阵A的特征值的近似值,k是迭代次数,下面的矩阵B是m阶矩阵At的(m-1)阶主子矩阵,即At降一阶.i =3tzgk =-4.872k =5sk =-4.637B =7.142tzgk =7.142请注意:n阶实对称矩阵A的全部真特征值lamoda和至少含t个有效数字的近似特征值tzg 如下:lamoda =-4.3661.1842.0007.181tzg =-4.8721.7302.0007.142(2)在MATLAB工作窗口输入程序>> A=[12 -56 3 -14 -90 -41;-56 71 23 61 -9 -21;3 23 53 12 -72 51;-14 61 12 73 23 21;-90 -9 -72 23 -34 -61;-41 -21 51 21 -61 -52], tzg=qr4(A,4,100)运行后屏幕显示结果如下请注意:下面的i表示求第i个特征值,k是迭代次数,sk是原点位移量,Bk=Ak-sk*eye(n),Qk 和Rk是Bk的QR分解,At=Rk*Qk+sk*eye(n)迭代矩阵:i =1k =1sk =-52Bk =64 -56 3 -14 -90 -41-56 123 23 61 -9 -213 23 105 12 -72 51-14 61 12 125 23 21-90 -9 -72 23 18 -61-41 -21 51 21 -61 0Qk =-0.4877 0.1531 0.0110 -0.3210 -0.7966 -0.03020.4268 -0.6902 0.0293 0.2307 -0.4943 0.2076-0.0229 -0.1854 -0.7498 0.0708 -0.0367 -0.62980.1067 -0.3999 0.0569 -0.8801 0.2157 -0.06530.6859 0.4443 0.2359 -0.1349 -0.2604 -0.43650.3125 0.3294 -0.6148 -0.2143 -0.0731 0.6038Rk =-131.2174 73.0543 -26.2160 68.2608 37.4417 -29.72930 -133.0416 -54.8715 -79.3230 -15.5119 -36.73930 0 -125.6735 -7.7419 95.7846 -52.49850 0 0 -98.2059 12.1142 1.67370 0 0 0 83.5168 61.58630 0 0 0 0 -9.9811At =67.4514 -86.1061 51.3408 -1.6460 76.5261 -3.1187-86.1061 62.7258 51.6606 45.2076 57.3920 -3.288051.3408 51.6606 96.6541 -3.7567 -18.1668 6.1366-1.6460 45.2076 -3.7567 32.4419 -24.4622 2.138676.5261 57.3920 -18.1668 -24.4622 -78.2465 0.7293-3.1187 -3.2880 6.1366 2.1386 0.7293 -58.0267请注意:下面的i表示求第i个特征值,k是迭代次数,sk是原点位移量,Bk=Ak-sk*eye(n),Qk 和Rk是Bk的QR分解,At=Rk*Qk+sk*eye(n)迭代矩阵:i =1k =2sk =-58.0267Bk =125.4782 -86.1061 51.3408 -1.6460 76.5261 -3.1187-86.1061 120.7526 51.6606 45.2076 57.3920 -3.288051.3408 51.6606 154.6809 -3.7567 -18.1668 6.1366-1.6460 45.2076 -3.7567 90.4686 -24.4622 2.138676.5261 57.3920 -18.1668 -24.4622 -20.2198 0.7293-3.1187 -3.2880 6.1366 2.1386 0.7293 0Qk =-0.7052 0.1935 -0.2299 -0.3147 0.5598 -0.00390.4839 -0.5340 -0.2202 -0.0946 0.6505 0.0054-0.2885 -0.4861 -0.7045 0.1495 -0.4009 -0.03150.0093 -0.2893 0.1849 -0.8863 -0.3106 -0.0076-0.4301 -0.5970 0.6032 0.2892 0.0754 0.07420.0175 0.0305 -0.0655 -0.0243 -0.0220 0.9967Rk =-177.9427 79.9237 -47.9486 35.5150 -12.4675 -1.45630 -153.7038 -80.7260 -34.1371 12.1657 -2.88520 0 -144.2113 -5.0943 -34.1981 -2.04720 0 0 -91.6269 -16.4126 0.52520 0 0 0 93.5178 -6.95430 0 0 0 0 -0.1614At =125.6255 -56.6838 56.2327 6.2201 -40.3402 -0.0028-56.6838 65.8196 91.9343 36.3234 -56.0440 -0.004956.2327 91.9343 22.1411 -26.8778 56.8615 0.01066.2201 36.3234 -26.8778 18.4203 27.2120 0.0039-40.3402 -56.0440 56.8615 27.2120 -50.8189 0.0036-0.0028 -0.0049 0.0106 0.0039 0.0036 -58.1877请注意:i表示求第i个特征值,tzgk是矩阵A的特征值的近似值,k是迭代次数,下面的矩阵B是m阶矩阵At的(m-1)阶主子矩阵,即At降一阶.i =1tzgk =-58.1877k =2sk =-58.0267B =125.6255 -56.6838 56.2327 6.2201 -40.3402-56.6838 65.8196 91.9343 36.3234 -56.044063.56.2327 91.9343 22.1411 -26.8778 56.86156.2201 36.3234 -26.8778 18.4203 27.2120-40.3402 -56.0440 56.8615 27.2120 -50.8189请注意:下面的i表示求第i个特征值,k是迭代次数,sk是原点位移量,Bk=Ak-sk*eye(n),Qk 和Rk是Bk的QR分解,At=Rk*Qk+sk*eye(n)迭代矩阵:i =2k =3sk =-50.8189Bk =176.4443 -56.6838 56.2327 6.2201 -40.3402-56.6838 116.6385 91.9343 36.3234 -56.044056.2327 91.9343 72.9600 -26.8778 56.86156.2201 36.3234 -26.8778 69.2391 27.2120-40.3402 -56.0440 56.8615 27.2120 0Qk =-0.8915 0.0982 0.2806 -0.2194 -0.26230.2864 -0.6231 0.4721 -0.2454 -0.4965-0.2841 -0.6298 0.1645 0.3591 0.6055-0.0314 -0.2269 -0.3554 -0.8387 0.34320.2038 0.3923 0.7383 -0.2435 0.4475Rk =-197.9237 45.2527 -32.0958 15.8644 2.90150 -166.3791 -69.3146 -10.1284 -11.02540 0 122.7118 9.9548 -38.09480 0 0 -84.6267 20.19780 0 0 0 82.1756At =147.7971 -29.8854 -42.9412 6.7762 16.7488-29.8854 94.4890 -94.4902 27.1220 32.2359-42.9412 -94.4902 -62.2964 44.9875 60.66746.7762 27.1220 44.9875 15.2418 -20.005716.7488 32.2359 60.6674 -20.0057 -14.0439请注意:下面的i表示求第i个特征值,k是迭代次数,sk是原点位移量,Bk=Ak-sk*eye(n),Qk 和Rk是Bk的QR分解,At=Rk*Qk+sk*eye(n)迭代矩阵:i =2k =4sk =-14.0439Bk =161.8411 -29.8854 -42.9412 6.7762 16.7488-29.8854 108.5329 -94.4902 27.1220 32.2359-42.9412 -94.4902 -48.2524 44.9875 60.66746.7762 27.1220 44.9875 29.2857 -20.005716.7488 32.2359 60.6674 -20.0057 0Qk =-0.9462 0.0767 -0.2892 -0.1036 0.06700.1747 -0.6934 -0.6522 -0.1674 0.18810.2511 0.6549 -0.4023 -0.4167 0.4154-0.0396 -0.1839 0.3418 -0.8875 -0.2454-0.0979 -0.2250 0.4609 -0.0073 0.8528Rk =-171.0440 19.2874 4.2844 10.4203 5.80810 -151.6697 8.6993 10.2944 22.34450 0 136.7883 -36.9542 -57.10880 0 0 -49.8308 -14.65420 0 0 0 37.2997At =151.2612 -26.9120 41.3973 3.4091 -3.6524-26.9120 89.8963 109.2297 12.4590 -8.392141.3973 109.2297 -108.0218 -23.7870 17.19103.4091 12.4590 -23.7870 30.2856 -0.2714-3.6524 -8.3921 17.1910 -0.2714 17.7663。
线性代数第五章 课后习题及解答

第五章课后习题及解答1. 求下列矩阵的特征值和特征向量:(1) ;1332⎪⎪⎭⎫⎝⎛-- 解:,07313322=--=--=-λλλλλA I2373,237321-=+=λλ ,001336371237121371⎪⎪⎭⎫ ⎝⎛→→⎪⎪⎭⎫⎝⎛=-++- A I λ 所以,0)(1=-x A I λ的基础解系为:.)371,6(T-因此,A 的属于1λ的所有特征向量为:).0()371,6(11≠-k k T,001336371237123712⎪⎪⎭⎫ ⎝⎛→→⎪⎪⎭⎫⎝⎛-=---+ A I λ 所以,0)(2=-x A I λ的基础解系为:.)371,6(T+因此,A 的属于2λ的所有特征向量为:).0()371,6(22≠+k k T(2) ;211102113⎪⎪⎪⎭⎫ ⎝⎛--解:2)2)(1(21112113--==------=-λλλλλλ A I所以,特征值为:11=λ(单根),22=λ(二重根)⎪⎪⎪⎭⎫ ⎝⎛-→→⎪⎪⎪⎭⎫ ⎝⎛------=-0001100011111121121 A I λ所以,0)(1=-x A I λ的基础解系为:.)1,1,0(T因此,A 的属于1λ的所有特征向量为:).0()1,1,0(11≠k k T⎪⎪⎪⎭⎫ ⎝⎛-→→⎪⎪⎪⎭⎫ ⎝⎛-----=-0001000110111221112 A I λ所以,0)(2=-x A I λ的基础解系为:.)0,1,1(T因此,A 的属于2λ的所有特征向量为:).0()0,1,1(22≠k k T(3) ;311111002⎪⎪⎪⎭⎫ ⎝⎛-解:3)2(31111102-==------=-λλλλλ A I所以,特征值为:21=λ(三重根)⎪⎪⎪⎭⎫⎝⎛-→→⎪⎪⎪⎭⎫ ⎝⎛----=-0000001111111110001 A I λ所以,0)(1=-x A I λ的基础解系为:.)1,0,1(,)0,1,1(TT -因此,A 的属于1λ的所有特征向量为:TT k k )1,0,1()0,1,1(21-+(21,k k 为不全为零的任 意常数)。
第五章求矩阵特征值和特征向量

第五章求矩阵特征值和特征向量第五章求矩阵特征值与特征向量n 阶⽅阵A 的n 个特征值就是其特征⽅程det()0λ-=A I的n 个根,⽅程A 属于特征值λ的特征向量x 是线性⽅程组λ=Ax x的⾮零解。
本章讨论求⽅阵A 的特征值和特征向量的两个常⽤的数值⽅法。
以及求实对称矩阵特征值的对分法。
5.1 幂法在实际问题中,矩阵的按模最⼤特征根起着重要的作⽤。
例如矩阵的谱半径即矩阵的按模最⼤特征根的值,它决定了迭代矩阵是否收敛。
本节先讨论求实⽅阵的按模最⼤特征根的常⽤迭代法:幂法。
5.1.1幂法的基本思想幂法是求实⽅阵A 按模最⼤特征值及其特征向量的⼀种迭代⽅法。
它的基本思想是:先任取⾮零初始向量0x ,然后作迭代序列1k k +=x Ax ,0,1,k = (5。
1)再根据k 增⼤时,k x 各分量的变化规律:按模最⼤的特征向量会愈来愈突出,从⽽可求出⽅阵A 的按模最⼤特征值及其特征向量。
先看⼀个计算实例。
例1 设矩阵1221??=A ⽤特征⽅程容易求得A 的两个特征值为11-=λ,32=λ下⾯⽤幂法来计算,取初始向量()01,0T=x ,计算向量序列 1k k +=x Ax ,0,1,k = 具体结果如表5.1所⽰.表5.1 幂法计算结果k()1k x()2k x 011 2 3 1 5 13 2 4 14 4 5 6 741 121 365 109340 122 364 1094考察两个相邻向量对应分量之⽐:1(1)2(1=x x ,6.2)2(1)3(1=x x ,(4)1(3)1 3.154x x =,(5)1(4)1 2.951x x =,(6)1(5)1 3.016x x =,(7)1(6)1 2.994x x = 2)1(2)2(2=x x ,5.3)2(2)3(2=x x ,(4)2(3)2 2.857x x =,(5)2(4)2 3.05x x =,(6)2(5)2 2.983x x =, (7)2(6)2 3.005x x = 由上⾯计算看出,两相邻向量对应分量之⽐值,随k 的增⼤⽽趋向于⼀个固定值3,⽽且这个值恰好就是矩阵A 的按模最⼤的特征值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章 矩阵特征问题的求解5.1 引言 在科学技术的应用领域中,许多问题都归为求解一个特征系统。
如动力学系统和结构系统中的振动问题,求系统的频率与振型;物理学中的某些临界值的确定等等。
设A 为n 阶方阵,n n ij R a A ⨯∈=)(,若)0(≠∈x R x n ,有数λ使Ax= λx (5.1) 则称λ为A 的特征值,x 为相应于λ的特征向量。
因此,特征问题的求解包括两方面: 1.求特征值λ,满足 0)det()(=-=I A λλϕ (5.2) 2.求特征向量)0(≠∈x R x n ,满足齐方程组0)(=-x I A λ (5.3)称ϕ(λ)为A 的特征多项式,它是关于λ的n 次代数方程。
关于矩阵的特征值,有下列代数理论,定义1 设矩阵A, B ∈R n ⨯n ,若有可逆阵P ,使AP P B 1-= 则称A 与B 相似。
定理1 若矩阵A, B ∈R n ⨯n 且相似,则 (1)A 与B 的特征值完全相同; (2)若x 是B 的特征向量,则Px 便为A 的特征向量。
定理2 设A ∈R n ⨯n 具有完全的特征向量系,即存在n 个线性无关的特征向量构成R n 的一组基底,则经相似变换可化A 为对角阵,即有可逆阵P ,使⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡==-n D AP P λλλO 211其中λi 为A 的特征值,P 的各列为相应于λi 的特征向量。
定理3 A ∈R n ⨯n ,λ1, …, λn 为A 的特征值,则 (1)A 的迹数等于特征值之积,即∑∑===≡ni in i ii a A tr 11)(λ(2)A 的行列式值等于全体特征值之积,即n A λλλΛ21)det(=定理4 设A ∈R n ⨯n 为对称矩阵,其特征值λ1≥λ2≥…≥λn ,则(1)对任A ∈R n ,x ≠0,1),(),(λλ≤≤x x x Ax n(2)),(),(minx x x Ax x n ≠=λ(3)),(),(max1x x x Ax x ≠=λ 定理5 (Gerschgorin 圆盘定理) 设A ∈R n ⨯n ,则 (1)A 的每一个特征值必属于下述某个圆盘之中,n i aa z nij j ijii ,,2,1,1Λ=≤-∑≠=(5.4)(5.4)式表示以a ii 为中心,以半径为∑≠=nij j ija1的复平面上的n 个圆盘。
(2)如果矩阵A 的m 个圆盘组成的并集S (连通的)与其余n – m 个圆盘不连接,则S 内恰包含m 个A 的特征值。
定理4及定理5给出了矩阵特征值的估计方法及界。
例1 设有⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=411101014A估计A 的特征值的范围。
解 由圆盘定理,A 的3个圆盘为图5.1 D 1: 14≤-z D 2: 20≤-z D 3: 24≤+z见图5.1。
D 2为弧立圆盘且包含A 的一个实特征值λ1(因为虚根成对出现的原理),则3≤λ1≤5。
而λ2,λ3∈D 1∪D 2,则6max )(≤=i A λρ,即6)(3≤≤A ρ5.2 乘幂法与反幂法 在实际工程应用中,如大型结构的振动系统中,往往要计算振动系统的最低频率(或前几个最低频率)及相应的振型,相应的数学问题便为求解矩阵的按模最大或前几个按模最大特征值及相应的特征向量问题,或称为求主特征值问题。
5.2.1 乘幂法 乘幂法是用于求大型稀疏矩阵的主特征值的迭代方法,其特点是公式简单,易于上机实现。
乘幂法的计算公式为: 设A ∈R n ⨯n ,取初始向量x (0)∈R n ,令x (1) = Ax (0),x (2) = Ax (1),…,一般有)1()(-=k k Ax x(5.5)形成迭代向量序列{x (k)}。
由递推公式(5.5),有)0()1(2)2()()(x A x A Ax A x k k k k ====--Λ (5.6)这表明x (k )是用A 的k 次幂左乘x (0)得到的,因此称此方法为乘幂法,(5.5)或(5.6)式称为乘幂公式,{x (k )}称为迭代序列。
下面分析乘幂过程,即讨论当k →∞时,{x (k )}与矩阵A 的主特征值及相应特征向量的关系。
设A = (a ij )n ⨯n 有完全的特征向量系,且λ1, λ2,…, λn 为A 的n 个特征值,满足n λλλ≥≥≥Λ21v 1, v 2,…, v n 为相应的特征向量且线性无关,从而构成R n 上的一组基底。
对任取初始向量x (0) ∈ R n ,可由这组基底展开表示为∑==+++=nj jj nn v v v v x 12211)0(ααααΛ (5.7)其中α1, α2,…, αn 为展开系数。
将x (0)的展开式(5.7)代入乘幂公式(5.6)中,得)(11)(j knj j jn j j kk v Av Ax∑∑====αα(5.8)利用j k j j k v v A λ=(5.8)式为jkjnj j k vxλα∑==1)( (5.9)(1)如果A 有唯一的主特征值,即Λ≥>21λλ,设λ1 ≠ 0,且由(5.9)式,有()k kj kjnj j kk v v v x εαλλλααλ+=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛+=∑=11112111)( 其中jki jnj j k v ⎪⎪⎭⎫⎝⎛=∑=λλαε2,由于n j j ,,3,2,11Λ=<λλ,故当k 充分大时,ε k ≈ 0,此时111)(v x kk αλ≈(5.10)对i = 1, 2, …, n ,若(α1v 1)i ≠ 0,考虑相邻迭代向量的对应分量比值,111111)1(1)()1()()(λαλαλ=≈++ikik k i k i v v x x (5.11)即对i = 1, …, n1)()1(lim λ=+∞→k ik i k x x (5.12)这表明主特征值λ1可由(5.11)或(5.12)式得到。
由于迭代序列x (k ),当k 充分大时,(5.10)式成立,x (k )与v 1只相差一个常数因子,故可取x (k )作为相应于主特征值λ1的特征向量的近似值。
迭代序列x (k )的收敛速度取决于12λλ的大小。
(2)如果A 的主特征值不唯一,且Λ≥>=321λλλ可分三种情况讨论: a )λ1 = λ2;b )λ1 = - λ2;c )21λλ=情况a )当λ1 = λ2时,A 的主特征值为二重根,根据(5.9)式)(221111322111)(k kj kjnj j kk v v v v v x εααλλλαααλ++=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛++=∑= 当k 充分小时,由于11<λλj,j = 3,…, n ,ε k ≈ 0,则)(22111)(v v x kk ααλ+≈对i = 1, 2, …, n ,如果0)(2211≠+i v v αα,则1)()1(lim λ=+∞→k ik i k x x (主特征值) 且x (k )收敛到相应于λ1 (=λ2)的特征向量的近似值。
这种重主特征值的情况,可推广到A 的r 重主特征值的情况,即当r λλλ===Λ21 且11+>r λλ时,上述讨论的结论仍然成立。
情况b )当λ1 = - λ2时,A 的主特征值为相反数,(5.9)式为))1(()1()1(22111132211132121113222111)(k k kj kjnj j k knj jk jj k kk nj jk jj k k k v v v v v vv v vv v xεααλλλαααλλαλαλαλαλαλα+-+=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛+-+=+-+=++=∑∑∑===当k 充分大时,11<λλj,j = 3, 4, …, n , ε k ≈ 0,则))1((22111)(v v x k kk ααλ-+≈(5.13)由于(5.13)式中出现因子(-1) k ,则当k 变化时,x (k )出现振荡、摆动现象,不收敛,利用(-1) k 的特点,连续迭代两步,得))1(())1((2211)2(122211)2(1)1(v v v v x kk k k k ααλααλ-+=-+≈++++从而,对i = 1, 2, …, n ,若0))1((2211≠-+i k v v αα,则21)()2(lim λ=+∞→k ik i k x x (5.14)开方之后,便得到A 的以上主特征值λ1, λ2 = - λ1。
为计算相应于λ1, λ2的特征向量,采取组合方式,1111)1(1)(1)1(2v C v x x k k k k =≈+++αλλ(5.15) 2222)1(11)(1)1(2)1(v C v x x k k k k k =-≈-+++αλλ(5.16)可见2211,v C v C k k分别为相应于λ1与λ2的特征向量。
情况c )当21λλ=时,A 的主特征值为共轭复根。
因A 为实矩阵,A A =,于是由111v Av λ=有1211v v A Av λ==即21v v =(v 1与v 2为互为共轭向量)。
设θρλi e =1,θρλi e -=2,对任取x (0) ∈R n ,展开式(5.7)可为∑=++=nj jj vv v x31111)0(ααα (5.17)将(5.17)式代入(5.9)式,j kj nj j kik k i ik k jk jnj j k kk v v e v e vv v x⎪⎪⎭⎫⎝⎛++=++=∑∑=-=ρλαρραραλαλαλαθθ32113121111)(同理,当k 充分大时)(1111)(θθααρik ik k k e v e v x -+≈(5.18)对j = 1, 2,…, n ,设复数表示ϕϕααi j j i j j e r v e r v -==)(,)(1111则(5.18)式的复数表示可为)()()()(θϕθϕρk i j k i j k k j e r e r x +-++≈连续迭代,得⎪⎪⎩⎪⎪⎨⎧++≈++≈+≈++++))2(cos(2))1(cos(2)cos(22)2(1)1()(θϕρθϕρθϕρk r x k r x k r x j k k jj k k jj k k j (5.19)利用三角函数运算性质及λ1、λ2的复数表示,不难验证。
0)(21)1(21)2(≈++-++k j k j k j x x x λλλλ令2121,)(λλλλ=+-=q p(5.20)解方程(j = 1, 2, …, n )0)()1()2(=++++k j k j k j qx px x(5.21)求出p, q 后,再解出主特征值λ1、λ2,得⎪⎪⎩⎪⎪⎨⎧⎪⎭⎫ ⎝⎛---=⎪⎭⎫ ⎝⎛-+-=22212222p q i p p q i p λλ(5.22)同样,采取组合方式求相应于λ1、λ2的特征向量。