数学建模椅子问题

椅子能在不平的地面上放稳
把椅子往不平的地面上一放,通常只有三只脚着地,放不稳,然而只要稍挪动几次,就可以四脚着地,放稳了。下面用数学语言证明。
一、模型假设
对椅子和地面都要作一些必要的假设:
1、椅子四条腿一样长,椅脚与地面接触可视为一个点,四脚的
连线呈正方形。
2、地面高度是连续变化的,沿椅子的任何方向都不会出现间断
(没有像台阶那样的情况),即地面可视为数学上的连续曲面。
3、对于椅脚的间距和椅子脚的长度而言,地面是相对平坦的,
使椅子在任何位置至少有三只同时着地。
二、模型建立
示四只同时着地的条件、结
论。
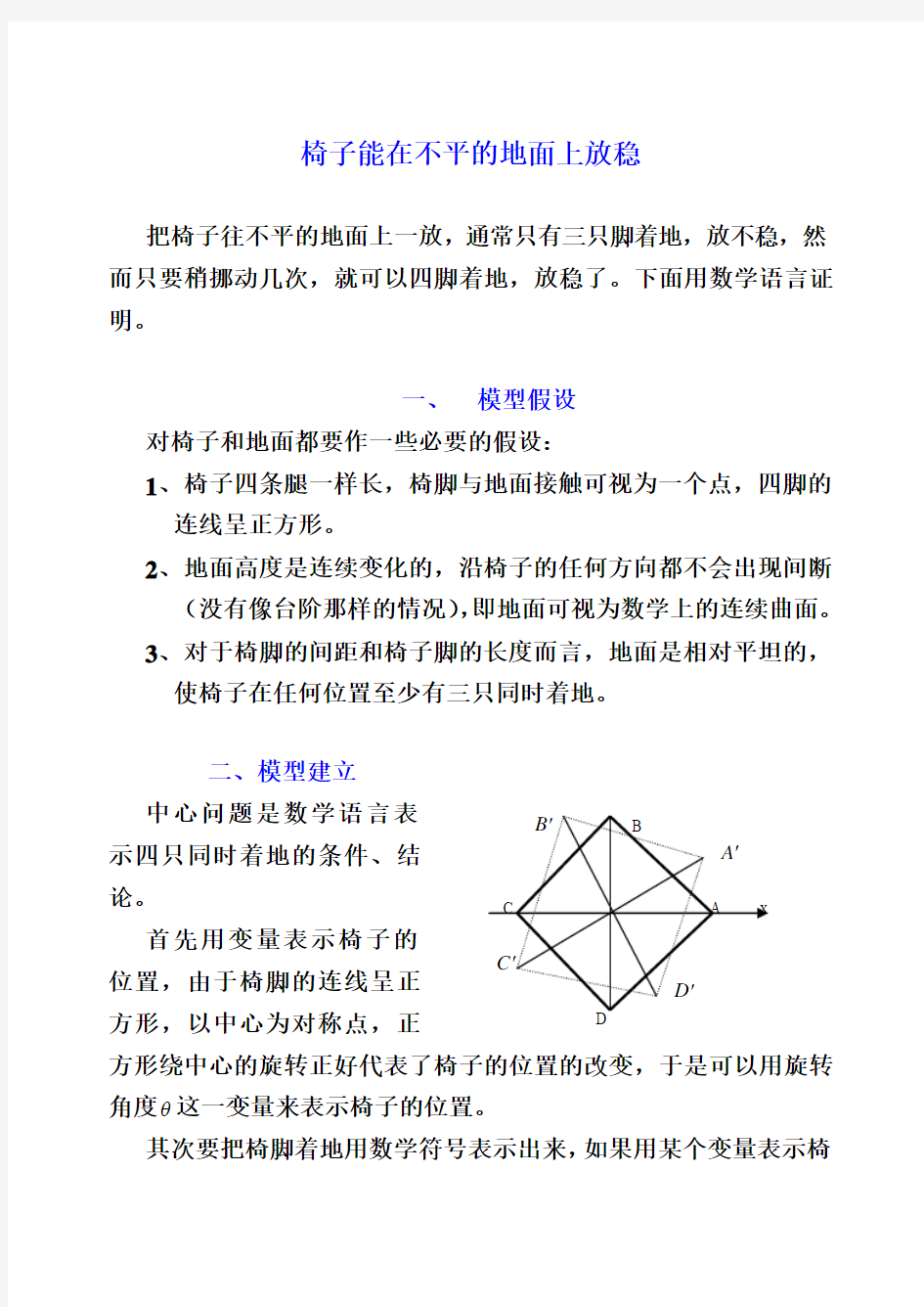
首先用变量表示椅子的
位置,由于椅脚的连线呈正
方形,以中心为对称点,正
方形绕中心的旋转正好代表了椅子的位置的改变,于是可以用旋转角度θ这一变量来表示椅子的位置。
其次要把椅脚着地用数学符号表示出来,如果用某个变量表示椅
脚与地面的竖直距离,当这个距离为0时,表示椅脚着地了。椅子要挪动位置说明这个距离是位置变量的函数。
由于正方形的中心对称性,只要设两个距离函数就行了,记A 、C 两脚与地面距离之和为()θf ,B 、D 两脚与地面距离之和为()θg ,显然()θf 、()0≥θg ,由假设2知f 、g 都是连续函数,再由假设3知()θf 、()θg 至少有一个为0。当0=θ时,不妨设()()0,0>=θθf g ,这样改变椅子的位置使四只同时着地,就归结为如下命题:
命题 已知()θf 、()θg 是θ的连续函数,对任意θ,()θf *()θg =0,且()()00,00>=f g ,则存在0θ,使()()000==θθf g 。
三、模型求解
将椅子旋转090,对角线AC 和BD 互换,由()()00,00>=f g 可知()()02,02=>ππf g 。令()()()θθθf g h -=,则()()00,20h h π<>,由f 、g 的连续性知h 也是连续函数,由零点定理,则存在()2000πθθ<<使()00=θh ,()()00θθf g =,由()()0*00=θθf g ,所以()()000==θθf g 。
四、评 注
模型巧妙在于用已知的元变量θ表示椅子的位置,用θ的两个函数表示椅子四脚与地面的距离。利用正方形的中心对称性及旋转090并不是本质的,同学们可以考虑四脚呈长方形的情形。
数学建模答题模板
例:某公司有6个仓库,库存货物总数分别为60,55,51,43,41,52,现有8个客户各要一批货,数量分别为35,37,22,32,41,32,43,38.各仓库到8个客户处得单位货物运价见下表。 问题分析:本问题中,各仓库的供应总量为302个单位,需求量为280个单位,为一个供需不平衡问题。目标函数为运输费用,约束条件有两个:分别是供应方和需求方的约束。 解: 引入决策变量ij x ,代表着从第i 个仓库到第j 个客户的货物运量,用符号ij c 表示从第i 个仓库到第j 个客户的单位货物运价,i a 表示第i 个仓库的最大供货量,j d 表示第j 个客户的订货量。 则本问题的数学模型为: 68 11 min ij ij i j z c x ===∑∑ s.t 8 1 61,1,2,6,1,2,,80,1,2,6,1,2,,8ij i j ij j i ij x a i x d j x i j ==? ≤=???? ? ? ≤=????? ?≥=???=?????∑∑ 模型求解:用LINGO 语言编写程序(程序见题后附录),运行得到以下求解结果:
以下省略了其他变量的具体数值。 计算结果表明:目标函数值为664.00,最优运输方案见下表 【参考文献】 [1]李大潜,中国大学生数学建模竞赛(第三版)[M],北京:高等教育出版社,2009 [2]叶其孝,大学生数学建模竞赛辅导教材(五)[M],长沙:湖南教育出版社,2008 [3]袁新生,邵大宏,郁时炼.LINGO和EXCEL在数学建模中的应用[M],北京:科学出版社,2007 附录:LINGO程序 model: sets: wh/w1..w6/:ai;vd/v1..v8/:dj; links(wh,vd):c,x; endsets data: ai=60,55,51,43,41,52; dj=35,37,22,32,41,32,43,38; c=6,2,6,7,4,2,5,9 4,9,5,3,8,5,8,2 5,2,1,9,7,4,3,3 7,6,7,3,9,2,7,1 2,3,9,5,7,2,6,5 5,5,2,2,8,1,4,3; enddata min=@sum(links(i,j):c(i,j)*x(i,j));
数学建模题目及答案
09级数模试题 1. 把四只脚的连线呈长方形的椅子往不平的地面上一放,通常只有三只脚着地,放不稳,然后稍微挪动几次,就可以使四只脚同时着地,放稳了。试作合理的假设并建立数学模型说明这个现象。 (15分) 解:对于此题,如果不用任何假设很难证明,结果很可能是否定的。 因此对这个问题我们假设 : (1)地面为连续曲面 (2)长方形桌的四条腿长度相同 (3)相对于地面的弯曲程度而言,方桌的腿是足够长的 (4)方桌的腿只要有一点接触地面就算着地。 那么,总可以让桌子的三条腿是同时接触到地面。 现在,我们来证明:如果上述假设条件成立,那么答案是肯定的。以长方桌的中心为坐标原点作直角坐标系如图所示,方桌的四条腿分别在A、B、C、D 处,A、B,C、D 的初始位置在与x 轴平行,再假设有一条在x 轴上的线ab,则ab 也与A、B,C、D 平行。当方桌绕中心0旋转时,对角线 ab 与x 轴的夹角记为θ。 容易看出,当四条腿尚未全部着地时,腿到地面的距离是不确定的。为消除这一不确定性,令 ()f θ为A、B 离地距离之和, ()g θ为C、D 离地距离之和,它们的值由θ唯一确定。由假设(1), ()f θ,()g θ均为θ的连续函数。又由假设(3),三条腿总能同时着地, 故()f θ()g θ=0必成立(?θ)。 不妨设 (0)0f =,(0)0g >g (若(0)g 也为 0,则初始时刻已四条腿着地,不必再旋转),于是问题归 结为: 已知 ()f θ,()g θ均为θ的连续函数,(0)0f =,(0)0g >且对任意θ有00()()0f g θθ=,求证存 在某一0θ,使00()()0f g θθ=。 证明:当θ=π时,AB 与CD 互换位置,故()0f π>,()0g π=。作()()()h f g θθθ=?,显然,() h θ也是θ的连续函数,(0)(0)(0)0h f g =?<而()()()0h f g πππ=?>,由连续函数的取零值定 理,存在0θ,0 0θπ<<,使得0()0h θ=,即00()()f g θθ=。又由于00()()0f g θθ=,故必有 00()()0f g θθ==,证毕。 2.学校共1000名学生,235人住在A 宿舍,333人住在B 宿舍,432人住在C 宿舍。学生 们要组织一个10人的委员会,试用合理的方法分配各宿舍的委员数。(15分) 解:按各宿舍人数占总人数的比列分配各宿舍的委员数。设:A 宿舍的委员数为x 人,B 宿舍的委员数为y 人,C 宿舍的委员数为z 人。计算出人数小数点后面的小数部分最大的整数进1,其余取整数部分。 则 x+y+z=10;
数学建模常用的十种解题方法
数学建模常用的十种解题方法 摘要 当需要从定量的角度分析和研究一个实际问题时,人们就要在深入调查研究、了解对象信息、作出简化假设、分析内在规律等工作的基础上,用数学的符号和语言,把它表述为数学式子,也就是数学模型,然后用通过计算得到的模型结果来解释实际问题,并接受实际的检验。这个建立数学模型的全过程就称为数学建模。数学建模的十种常用方法有蒙特卡罗算法;数据拟合、参数估计、插值等数据处理算法;解决线性规划、整数规划、多元规划、二次规划等规划类问题的数学规划算法;图论算法;动态规划、回溯搜索、分治算法、分支定界等计算机算法;最优化理论的三大非经典算法:模拟退火法、神经网络、遗传算法;网格算法和穷举法;一些连续离散化方法;数值分析算法;图象处理算法。 关键词:数学建模;蒙特卡罗算法;数据处理算法;数学规划算法;图论算法 一、蒙特卡罗算法 蒙特卡罗算法又称随机性模拟算法,是通过计算机仿真来解决问题的算法,同时可以通过模拟可以来检验自己模型的正确性,是比赛时必用的方法。在工程、通讯、金融等技术问题中, 实验数据很难获取, 或实验数据的获取需耗费很多的人力、物力, 对此, 用计算机随机模拟就是最简单、经济、实用的方法; 此外, 对一些复杂的计算问题, 如非线性议程组求解、最优化、积分微分方程及一些偏微分方程的解⑿, 蒙特卡罗方法也是非常有效的。 一般情况下, 蒙特卜罗算法在二重积分中用均匀随机数计算积分比较简单, 但精度不太理想。通过方差分析, 论证了利用有利随机数, 可以使积分计算的精度达到最优。本文给出算例, 并用MA TA LA B 实现。 1蒙特卡罗计算重积分的最简算法-------均匀随机数法 二重积分的蒙特卡罗方法(均匀随机数) 实际计算中常常要遇到如()dxdy y x f D ??,的二重积分, 也常常发现许多时候被积函数的原函数很难求出, 或者原函数根本就不是初等函数, 对于这样的重积分, 可以设计一种蒙特卡罗的方法计算。 定理 1 )1( 设式()y x f ,区域 D 上的有界函数, 用均匀随机数计算()??D dxdy y x f ,的方法: (l) 取一个包含D 的矩形区域Ω,a ≦x ≦b, c ≦y ≦d , 其面积A =(b 一a) (d 一c) ; ()j i y x ,,i=1,…,n 在Ω上的均匀分布随机数列,不妨设()j i y x ,, j=1,…k 为落在D 中的k 个随机数, 则n 充分大时, 有
数学建模试题(带答案)四
数学建模部分课后习题解答 1.在稳定的椅子问题中,如设椅子的四脚连线呈长方形,结论如何? 解: 模型假设 (1) 椅子四条腿一样长,椅脚与地面接触处视为一点,四脚的连线呈长方形 (2) 地面高度是连续变化的,沿任何方向都不会出现间断(没有像台阶那样的情况), 即从数学角度来看,地面是连续曲面。这个假设相当于给出了椅子能放稳的必要条件 (3) 椅子在任何位置至少有三只脚同时着地。为了保证这一点,要求对于椅脚的间 距和椅腿的长度而言,地面是相对平坦的。因为在地面上椅脚间距和椅腿长度的尺寸大小相当的范围内,如果出现深沟或凸峰(即使是连续变化的),此时三只脚是无法同时着地的。 模型建立 在上述假设下,解决问题的关键在于选择合适的变量,把椅子四只脚同时着地表示出来。首先,引入合适的变量来表示椅子位置的挪动。生活经验告诉我们,要把椅子通过挪动放稳,通常有拖动或转动椅子两种办法,也就是数学上所说的平移与旋转变换。然而,平移椅子后问题的条件没有发生本质变化,所以用平移的办法是不能解决问题的。于是可尝试将椅子就地旋转,并试图在旋转过程中找到一种椅子能放稳的情形。 注意到椅脚连线呈长方形,长方形是中心对称图形,绕它的对称中心旋转180度后,椅子仍在原地。把长方形绕它的对称中心旋转,这可以表示椅子位置的改变。于是,旋转角度θ这一变量就表示了椅子的位置。为此,在平面上建立直角坐标系来解决问题。 设椅脚连线为长方形ABCD,以对角线AC 所在的直线为x 轴,对称中心O 为原点,建立平面直角坐标系。椅子绕O 点沿逆时针方向旋转角度θ后,长方形ABCD 转至A1B1C1D1的位置,这样就可以用旋转角)0(πθθ≤≤表示出椅子绕点O 旋转θ后的位置。 其次,把椅脚是否着地用数学形式表示出来。当椅脚与地面的竖直距离为零时,椅脚就着地了,而当这个距离大于零时,椅脚不着地。由于椅子在不同的位置是θ的函数,因此,椅脚与地面的竖直距离也是θ的函数。 由于椅子有四只脚,因而椅脚与地面的竖直距离有四个,它们都是θ的函数,而由假设(3)可知,椅子在任何位置至少有三只脚同时着地,即这四个函数对于任意的θ,其函数值至少有三个同时为0。因此,只需引入两个距离函数即可。考虑到长方形ABCD 是对称中心图形,绕其对称中心O 沿逆时针方向旋转180度后,长方形位置不变,但A,C 和B,D 对换了。因此,记A ,B 两脚与地面竖直距离之和为)(θf ,C,D 两脚之和为)(θg ,其中[] πθ,0∈,使得)()(00θθg f =成立。 模型求解 如果0)0()0(== g f ,那么结论成立。 如果)0(与) 0(g f 不同时为零,不妨设.0)0(,0)0(=>g f 这时,将长方形ABCD 绕点
最新数学建模椅子能在不平的地面上放稳吗
椅子能在不平的地面上放稳吗? 把椅子往不平的地面上一放,通常只有三只脚着地,放不稳,然而只要稍挪动几次,就可以四脚着地,放稳了.下面用数学语言证明. 一、 模型假设 对椅子和地面都要作一些必要的假设: 1. 椅子四条腿一样长,椅脚与地面接触可视为一个点,四脚的连线呈正方形. 2. 3. 地面高度是连续变化的,沿任何方向都不会出现间断(没有像台阶那样的情况),即地面可视为数学上的连续曲面. 4. 5. 对于椅脚的间距和椅脚的长度而言,地面是相对平坦的,使椅子在任何位置至少有三只脚同时着地. 二、模型建立 中心问题是数学语言表 示四只脚同时着地的条件、 结论. 首先用变量表示椅子的 位置,由于椅脚的连线呈正 方形,以中心为对称点,正方形绕中心的旋转正好代表了椅子的位置的改变,于是可以用旋转 D '
角度θ这一变量来表示椅子的位置. 其次要把椅脚着地用数学符号表示出来,如果用某个变量表示椅脚与地面的竖直距离,当这个距离为0时,表示椅脚着地了.椅子要挪动位置说明这个距离是位置变量的函数. 由于正方形的中心对称性,只要设两个距离函数就行了,记A 、C 两脚与地面距离之和为()θf ,B 、D 两脚与地面距离之和为()θg ,显然()θf 、()0≥θg ,由假设2知f 、g 都是连续函数,再由假设3知()θf 、()θg 至少有一个为0.当0=θ时,不妨设()()0,0>=θθf g ,这样改变椅子的位置使四只脚同时着地,就归结为如下命题: 命题 已知()θf 、()θg 是θ的连续函数,对任意θ,()θf *()θg =0,且()()00,00>=f g ,则存在0θ,使()()000==θθf g . 三、模型求解 将椅子旋转90?,对角线AC 和BD 互换,由()()00,00>=f g 可知()()02,02=>ππf g .令()()()θθθf g h -=,则()()00,20h h π<>,由f 、g 的连续性知h 也是连续函数,由零点定理,必存在()2000πθθ<<使()00=θh ,()()00θθf g =,由()()000g f θθ?=,所以()()000==θθf g . 四、评 注 模型巧妙在于用一元变量θ表示椅子的位置,用θ的两个函数表示椅子四脚与地面的距离.利用正方形的中心对称性及旋转90?并不
椅子能在不平的地面上放稳吗
椅子能在不平的地面上放稳吗? 把椅子往不平的地面上一放,通常只有三只脚着地,放不稳,然而只要稍挪动几次,就可以四脚着地,放稳了。下面用数学语言证明。 一、模型假设 对椅子和地面都要作一些必要的假设: 1、椅子四条腿一样长,椅脚与地面接触可视为一个点,四脚的 连线呈正方形。 2、地面高度是连续变化的,沿任何方向都不会出现间断(没有 像台阶那样的情况),即地面可视为数学上的连续曲面。 3、对于椅脚的间距和椅脚的长度而言,地面是相对平坦的,使 椅子在任何位置至少有三只脚同时着地。 二、模型建立 示四只脚同时着地的条件、 结论。 首先用变量表示椅子的 位置,由于椅脚的连线呈正 方形,以中心为对称点,正 方形绕中心的旋转正好代表了椅子的位置的改变,于是可以用旋转角度θ这一变量来表示椅子的位置。 其次要把椅脚着地用数学符号表示出来,如果用某个变量表示椅
脚与地面的竖直距离,当这个距离为0时,表示椅脚着地了。椅子要挪动位置说明这个距离是位置变量的函数。 由于正方形的中心对称性,只要设两个距离函数就行了,记A 、C 两脚与地面距离之和为()θf ,B 、D 两脚与地面距离之和为()θg ,显然()θf 、()0≥θg ,由假设2知f 、g 都是连续函数,再由假设3知()θf 、()θg 至少有一个为0。当0=θ时,不妨设()()0,0>=θθf g ,这样改变椅子的位置使四只脚同时着地,就归结为如下命题: 命题 已知()θf 、()θg 是θ的连续函数,对任意θ,()θf *()θg =0,且()()00,00>=f g ,则存在0θ,使()()000==θθf g 。 三、模型求解 将椅子旋转090,对角线AC 和BD 互换,由()()00,00>=f g 可知()()02,02=>ππf g 。令()()()θθθf g h -=,则()()02,00<>πh h ,由f 、g 的连续性知h 也是连续函数,由零点定理,必存在()2000πθθ<<使()00=θh ,()()00θθf g =,由()()0*00=θθf g ,所以()()000==θθf g 。 四、评 注 模型巧妙在于用已元变量θ表示椅子的位置,用θ的两个函数表示椅子四脚与地面的距离。利用正方形的中心对称性及旋转090并不是本质的,同学们可以考虑四脚呈长方形的情形。
全国大学生数学建模竞赛模版(完整版)
承诺书 我们仔细阅读了中国大学生数学建模竞赛的竞赛规则. 我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。 我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。 我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。如有违反竞赛规则的行为,我们将受到严肃处理。 我们参赛选择的题号是(从A/B/C/D中选择一项填写): 我们的参赛报名号为(如果赛区设置报名号的话): 所属学校(请填写完整的全名): 参赛队员(打印并签名) :1. 2. 3. 指导教师或指导教师组负责人(打印并签名): 日期:年月日赛区评阅编号(由赛区组委会评阅前进行编号):
2010高教社杯全国大学生数学建模竞赛 编号专用页 赛区评阅编号(由赛区组委会评阅前进行编号): 全国统一编号(由赛区组委会送交全国前编号):全国评阅编号(由全国组委会评阅前进行编号):
论文标题 摘要 内容要点: 关键词:结合问题、方法、理论、概念等
一、问题重述 内容要点: 1、问题背景:结合时代、社会、民生等 2、需要解决的问题 问题一: 问题二: 问题三: 二、问题分析 内容要点:什么问题、需要建立什么样的模型、用什么方法来求解 三、模型假设与约定 内容要点: 1、根据题目中条件作出假设 2、根据题目中要求作出假设 写作要求: 细致地分析实际问题,从大量的变量中筛选出最能表现问题本质的变量,并简化它们的关系。将一些问题理想化、简单化。 1、论文中的假设要以严格、确切的数学语言来表达,使读者不致产生任何曲解 2、所提出的假设确实是建立数学模型所必需的,与建立模型无关的假设只会扰乱读者的思考 3、假设应验证其合理性。假设的合理性可以从分析问题过程中得出,例如从问题的性质出发作出合乎常识的假设,或者由观察所给数据的图象,得到变量的函数形式,也可以参考其他资料由类推得到。对于后者应指出参考文献的相关内容 四、符号说明及名词定义 内容要点:包括建立方程符号、及编程中用到的符号等
长方形椅子能否在不平的地面上放稳吗
长方形椅子能否在不平的地面上放稳吗? 【问题提出】 日常生活中有这样的现象:把椅子往不平的地面上一放,通常只有三只脚着地,放不稳,然而只需稍微挪动几次,一般都可以使四只脚同时着地.试从数学的角度加以解释. 【模型假设】 为了明确问题,对上述现象中的有关因素在符合日常生活的前提下,作出如下假设: (1)椅子四条腿一样长,椅脚与地面接触处视为一点,四脚的连线呈长方形. (2)地面高度是连续变化的,沿任何方向都不会出现间断 (没有像台阶那样的情况),即从数学的角度看,地面是连续曲面.这个假设相当于给出了椅子能放稳的必要条件. (3)椅子在任何位置至少有三只脚同时着地.为保证这一点,要求对于椅脚的间距和椅腿的长度而言,地面是相对平坦的.因为在地面上与椅脚间距和椅腿长度的尺寸大小相当的范围内,如果出现深沟或凸峰(即使是连续变化的),此时三只脚是无法同时着地的. 【建立模型】 在上述假设下,解决问题的关键在于选择合适的变量,把椅子四只脚同时着地表示出来. 首先,引入合适的变量来表示椅子位置的挪动.生活经验告诉我们,要把椅子通过挪动放稳,通常有拖动或转动椅子两种办法,也就是数学上所说的平移与旋转变换.然而,平移椅子后问题的条件没有发生本质变化,所以用平移的办法是不能解决问题的.于是可尝试将椅子就地旋转,并试图在旋转过程中找到一种椅子能放稳的情形. 注意到椅脚连线呈长方形,长方形是中心对称图形,绕它的对称中心旋转180度后,椅子仍在原地.把长方形绕它的对称中心O旋转,这可以表示椅子位置的改变。于是,旋转角度θ这一变量就表示了椅子的位置.为此,在平面上建立直角坐标系来解决问题. 如下图所示,设椅脚连线为长方形ABCD,以对角线AC所在的直线为x轴,对称中心O为原点,建立平面直角坐标系.椅子绕O点沿逆时针方向旋转角度θ后,长方形ABCD转至A1B1C1D1 的位置,这样就可以用旋转角θ(0≤θ≤π)表示出椅子绕点O旋转θ后的位置. 其次,把椅脚是否着地用数学形式表示出来. 我们知道,当椅脚与地面的竖直距离为零时,椅脚就着地了,而当这个距离大于零时,椅脚不着地.由于椅子在不同的位置是θ的函数,因此,椅脚与地面的竖直距离也是θ的函数. 由于椅子有四只脚,因而椅脚与地面的竖直距离有四个,它们都是θ的函数.而由假设(3)可知,椅子在任何位置至少有三只脚同时着地,即这四个函数对于任意的θ,其函数值至少有三个同时为0.因此,只需引入两个距离函数即可.考虑到长方形ABCD是中心对称图形,绕其对称中心 O沿逆时针方向旋转180°后,长方形位置不变,但A,C和B,D对换了.因此,记
椅子能在不平的地面上放稳吗
椅子能在不平的地面上放稳吗? 模型假设 对椅子和地面都要作一些必要的假设: 1、椅子四条腿一样长,椅脚与地面接触可视为一个点,四脚的连线呈正方形。 2、地面高度是连续变化的,沿任何方向都不会出现间断(没有像台阶那样的情况),即地面可视为数学上的连续曲面。 3、对于椅脚的间距和椅脚的长度而言,地面是相对平坦的,使椅子在任何位置至少有三只脚同时着地。 假设1显然是合理的。假设2相当于给出了椅子能放稳的条件,因为如果地面高度不连续,譬如在有台阶的地方是无法使四只脚同时着地的。至于假设3是要排除这样的情况:地面上与椅脚间距和椅脚长度的尺寸大小相当的范围内,出现深沟或凸峰(即连续变化的),致使三只脚无法同时着地。 模型建立 中心问题是数学语言表示四只脚同时着地的条件、结论。 首先用变量表示椅子的位置,由于椅脚的连线呈正方形,以中心为对称点,正方形绕中心的旋转正好代表了椅子的位置的改变,于是可以用旋转角度θ这一变量来表示椅子的位置。 其次要把椅脚着地用数学符号表示出来,如果用某个变量表示椅脚与地面的竖直距离,当这个距离为0时,表示椅脚着地了。椅子要挪动位置说明这个距离是位置变量的函数。 由于正方形的中心对称性,只要设两个距离函数就行了,记A 、C 两脚与地面距离之和为()θf ,B 、D 两脚与地面距离之和为()θg ,显然()θf 、()0≥θg ,由假设2知f 、g 都是连续函数,再由假设3知()θf 、()θg 至少有一个为0。当0=θ时,不妨设()()0,0>=θθf g ,这样改变椅子的位置使四只脚同时着地,就归结为如下命题: 命题 已知()θf 、()θg 是θ的连续函数,对任意θ,()θf *()θg =0,且()()00,00>=f g ,则存在0θ,使()()000==θθf g 。 模型求解 将椅子旋转0 90,对角线AC 和BD 互换,由()()00,00>=f g 可知()()02,02=>ππf g 。 令()()()h f g θθθ=-,则()()02,00<>πh h ,由f 、g 的连续性知h 也是连续函数,由零点定理,必存在()2000πθθ<<使()00=θh ,()()00θθf g =,由()()0*00=θθf g ,所以 ()()000==θθf g 。 四、模型的进一步讨论 Ⅰ.考虑椅子四脚呈长方形的情形 设A 、B 两脚与地面之和为()θf ,C 、D 两脚与地面距离之和为()θg ,θ为AC 连线与x 轴正向的夹角(如图2所示)。显然()θf 、()0≥θg ,由假设2知f 、g 都是连续函数,再由假设3知()θf 、 ()θg 至少有一个为0。当0=θ时,不妨设()()0,0>=θθf g ,这样改变椅子的位置使四只脚同 C ' D '
数学建模做题步骤及注意事项【数模经验谈】
拿到建模题目以后,按照一下流程去分工合作 红色表示步骤蓝色表示注意事项 一、第一天上午 1. 各自对立思考1个小时,主要分析题目的问题背景,已知条件,建模目的等问题。至少每人必须提出10到15个问题,并回答自己的问题。 2. 重点用语言的形式表述清楚问题的结构,即用语言描述自己的初步模型。(要自己提出的模型,可能就会产生一些假设。) 3. 再和队友讨论。讨论1个小时。形成自己团队的初步模型,同样是以语言形式描述的。 4. 接下来查找一些文献,讨论修改团队的模型,形成一个最终较完整的模型。并根据讨论最后形成对问题的统一认识,形成问题重述部分的内容。 注:1)如果问题有好几问,可以重点讨论第一个问题,但是也要考虑其他问题与第一问的关系!(一般建模中的几问都是有一定联系得);也可以同时考虑,同时建模。 2)注意参考文献的处理,参考别人的方法一定要在文中注明!这也是要求一直留意查找文献的目的。【随时记录】 二、第一天下午 将自己团队的模型数学化,用数学符号和数学语言公式的形式,表述自己的模型。此时会继续需要查文献,产生一些假设条件,并产生自己论文中的符号说明。
三、第二天上午 一个人开始写文章,语言重在逻辑清晰,叙述简洁明了!图、表准确。文章格式正确、内容完整。(问题重述,问题分析,模型假设,符号说明,模型形式,以及参考文献都已经在第一天的讨论中有了一定的共识。) 其余两个人(在不清楚时3人讨论),开始考虑第一个问题的模型的求解,即研究模型的解法。查找文献或者自己提出对模型的求解方法。此时可能需要继续对第一天建立的模型进行修改,简化等处理。(讨论后,及时告诉写文章的队友)。 四、第二天下午 写文章的继续。 编程的开始编程计算模型。此时,可能需要根据所采取的算法对模型的表述重新修改。 另一人帮忙编程,并开始考虑第二个、第三个问题的模型及求解方法。并一起讨论,形成共识,写进文章中。(此时,同样可能需要查文献,符号表示,产生假设)【注意是两个人求解,一个MATLAB,一个MATHEMATICA】 五、第三天上午 应该给出所有问题的计算结果了(最迟下午6点前)。 产生论文初稿。 六、第三天下午 进行模型的分析。主要是分析编程计算出的解的现实意义等,通过图、
在不平地面上把椅子放稳的充分必要条件
数学的实践与认识 MATHEMATICS IN PRACTICE AND THEORY 1999 Vol.29 No.3 P.62-65 在不平地面上把椅子放稳的 充分必要条件 赵彦晖 摘 要:把椅子放在不平的地面上,通常只有三只脚着地,放不稳,然而只需稍挪动几次,就可以使四只脚同时着地、放稳.本文指出,当且仅当椅子的四脚共圆时,才能在一般不平的地面上放稳,并对此建立了数学模型,给出了理论上的证明. 关键词:椅子:不平地面;放稳;充分必要条件;数学模型 The Sufficient and Necessary Condition to Make a Chair Steady on Uneven Ground Zhao Yanhui (Xi′an Univ. of Arch. & Tech., Xi′an 710055) Abstract:Under normal conditions, it is impossible to make a chair Steady on uneven ground. In this paper, a mathematical model on this question is established, and it is proved that a sufficient and necessary conditon to make the chair Steady on uneven ground is four feet of the chair is on the common circle. Keywords:Chair, Uneven Ground, Stendy, Sufficient and Necessary Condition, Mathematical Model▲ 在不平的地面上能否把椅子放稳问题已在文[1]、[2]中作过介绍,但这些文献中都只就四脚连线呈正方形(或长方形)的椅子进行讨论.众所周知,我们日常生活中所遇到的椅子大都是四脚连线呈等腰梯形的椅子,那么,对这样的椅子甚至四脚连线为任意四边形的椅子是否也能在不平的地面上放稳?文[1]、[2]中并未讨论,也没有作出任何结论.对此,本文进行了全面的讨论,给出了完整的结论,使问题得到了圆满的解决. 1 模型假设 首先讨论四脚共圆的椅子,对此,我们作如下的必要假设: 假设1 椅子四条腿一样长,椅脚与地面接触处可视为一个点,椅子四脚连线为圆内接四边形 即椅子四个脚共面且共圆. 假设2 地面高度是连续变化的,即地面可视为数学上的连续曲面. 假设3 对于椅脚的间距和椅腿的长度而言,地面是相对平坦的,使椅子在任何位置至少有三只脚同时着地. 上述假设显然是合理的[1]. 2 模型建立 将椅子放在地面上任一位置,并使至少三只脚同时着地.这时以椅子四脚共圆的圆心O为原点,四脚所在的平面为xoy坐标面,并使椅脚之一(如椅脚A)在x轴的正半轴上建立平面坐标系,如图1.
美赛-数学建模-写作模版(各部分)
摘要 第一段:写论文解决什么问题 1.问题的重述 a. 介绍重点词开头: 例1:“Hand move” irrigation, a cheap but labor-intensive system used on small farms, consists of a movable pipe with sprinkler on top that can be attached to a stationary main. 例2:……is a real-life common phenomenon with many complexities. 例3:An (effective plan) is crucial to……… b. 直接指出问题: 例1:We find the optimal number of tollbooths in a highway toll-plaza for a given number of highway lanes: the number of tollbooths that minimizes average delay experienced by cars. 例2:A brand-new university needs to balance the cost of information technology security measures with the potential cost of attacks on its systems. 例3:We determine the number of sprinklers to use by analyzing the energy and motion of water in the pipe and examining the engineering parameters of sprinklers available in the market. 例4: After mathematically analyzing the ……problem, our modeling group would like to present our conclusions, strategies, (and recommendations )to the ……. 例5:Our goal is... that (minimizes the time )………. 2.解决这个问题的伟大意义 反面说明。如果没有…… Without implementing defensive measure, the university is exposed to an expected loss of $8.9 million per year. 3.总的解决概述 a.通过什么方法解决什么问题 例:We address the problem of optimizing amusement park enjoyment through distributing Quick Passes (QP), reservation slips that ideally allow an individual to spend less time waiting in line. b.实际问题转化为数学模型 例1 We formulate the problem as a network flow in which vertices are the locations of escorts and wheelchair passengers. 例2 : A na?ve strategy would be to employ the minimum number of escorts to guarantee that all passengers reach their gates on time. c.将问题分阶段考虑 例3:We divide the jump into three phases: flying through the air, punching through the stack, and landing on the ground. 第二、三段:具体分析 1.在什么模型中/ 建立了什么模型 a. 主流模型 例1:We formulate a differential model to account for the rates of change of these uses, and how this change would affect the overall consumption of water within the studied region.
数学建模椅子问题
椅子能在不平的地面上放稳 把椅子往不平的地面上一放,通常只有三只脚着地,放不稳,然而只要稍挪动几次,就可以四脚着地,放稳了。下面用数学语言证明。 一、模型假设 对椅子和地面都要作一些必要的假设: 1、椅子四条腿一样长,椅脚与地面接触可视为一个点,四脚的 连线呈正方形。 2、地面高度是连续变化的,沿椅子的任何方向都不会出现间断 (没有像台阶那样的情况),即地面可视为数学上的连续曲面。 3、对于椅脚的间距和椅子脚的长度而言,地面是相对平坦的, 使椅子在任何位置至少有三只同时着地。 二、模型建立 示四只同时着地的条件、结 论。 首先用变量表示椅子的 位置,由于椅脚的连线呈正 方形,以中心为对称点,正 方形绕中心的旋转正好代表了椅子的位置的改变,于是可以用旋转角度θ这一变量来表示椅子的位置。 其次要把椅脚着地用数学符号表示出来,如果用某个变量表示椅
脚与地面的竖直距离,当这个距离为0时,表示椅脚着地了。椅子要挪动位置说明这个距离是位置变量的函数。 由于正方形的中心对称性,只要设两个距离函数就行了,记A 、C 两脚与地面距离之和为()θf ,B 、D 两脚与地面距离之和为()θg ,显然()θf 、()0≥θg ,由假设2知f 、g 都是连续函数,再由假设3知()θf 、()θg 至少有一个为0。当0=θ时,不妨设()()0,0>=θθf g ,这样改变椅子的位置使四只同时着地,就归结为如下命题: 命题 已知()θf 、()θg 是θ的连续函数,对任意θ,()θf *()θg =0,且()()00,00>=f g ,则存在0θ,使()()000==θθf g 。 三、模型求解 将椅子旋转090,对角线AC 和BD 互换,由()()00,00>=f g 可知()()02,02=>ππf g 。令()()()θθθf g h -=,则()()00,20h h π<>,由f 、g 的连续性知h 也是连续函数,由零点定理,则存在()2000πθθ<<使()00=θh ,()()00θθf g =,由()()0*00=θθf g ,所以()()000==θθf g 。 四、评 注 模型巧妙在于用已知的元变量θ表示椅子的位置,用θ的两个函数表示椅子四脚与地面的距离。利用正方形的中心对称性及旋转090并不是本质的,同学们可以考虑四脚呈长方形的情形。
数学建模椅子平衡问题 蜗牛爬行问题 船渡河问题
1 椅子能在不平的地面上放稳得问题的拓展. 模型假设对椅子和地面应该作一些必要的假设: 1.椅子的四条腿一样长,椅脚与地面接触处可视为一个点。四脚的连线呈长方 形。 2.地面高度是连续变化的,沿任何方向都不会出现间断,即地面可视为数学上 连续曲面。 3.对于脚的间距和椅腿的长度而言,地面时相对平坦的,使椅子在任何位置至 少有三个脚同时着地。 模型构成中心问题是用数学语言把椅子的四只脚同时着地的条件和结论表示出来。 首先要用变量把椅子的位置,注意到椅脚连线呈长方形。以中心为对称点,长方形绕中心的旋转正好代表了椅子位置的改变,于是因此可以用旋转角度这一变量表示椅子的位置。在图中椅 线B’D’与X轴重合,椅子绕中 心点O轴旋转角度θ后。长方形 A’B’C’D’转至ABCD位置。用 θ(对角线与x 轴的夹角)表示 椅子位置,椅脚与地面距离为θ 的函数.A,C 两脚与地面距离之 和 ~ f (θ,),B,D 两脚与地面距 离之和 ~ g (θ) 地面为连续曲面 F (θ) , g (θ) 是连续数.椅子在任意位置至少 三只脚着地.对任意θ, f (θ ), g (θ )至少一个为0. 已知: f (θ ) , g (θ )是连 续函数 ; 对任意θ, f (θ) ? g (θ )=0 ; 且g (0)=0, f (0) > 0. 证明:存在θ0,使 f (θ0) = g (θ0) = 0. 模型求解 证明;设长方形的长为a ,宽为b。 将椅子旋转θ=2arctanb/a,对角线AC取代BD的位置。 由g(0)=0,f(0) > 0 ,知f(2arctanb/a)=0 ,g(2arctanb/a )>0.或,g (2arctanb/a )=0 (1)f(2arctanb/a)=0 ,g(2arctanb/a )=0 ,桌子能放平衡。 (2)f(2arctanb/a)=0 ,g(2arctanb/a )>0 令h(θ)= f(θ)–g(θ), 则h(0)>0和h(2arctanb/a)<0. 由 f, g的连续性知 h为连续函数, 据连续函数的基本性质, 必存在θ0 , 使 h(θ0)=0, 即f(θ0) = g(θ0) .
椅子放平稳问题-数学建模
椅子放平稳问题 所谓数学模型是指对于一个实际问题,为了特定目的,作出必要的简化假设,根据问题的内在规律,运用适当的数学工具,得到的一个数学结构 . 建立及求解数学模型的过程就是数学建模. 下面例子是一个简单的数学建模问题. 问题:四条腿一样长的椅子一定能在不平的地面上放平稳吗? 1.模型假设 (文字转化为数学语言) (1) 椅子四条腿一样长,椅子脚与地面的接触处视为一个点,四脚连线呈正方形; (2) 地面高度是连续变化的,沿任何方向都不会出现间断(没有台阶那样的情况),即视地面为数学上的连续曲面; (3) 地面起伏不是很大,椅子在任何位置至少有三只脚同时着地. 2.模型建立 (运用数学语言把条件和结论表现出来) 设椅脚的连线为正方形 ABCD ,对角线 AC 与 x 轴重合,坐标原点 O 在椅子中心,当椅子绕 O 点旋转后,对角线 AC 变为 A'C',A'C'与 x 轴的夹角为θ. 由于正方形的中心对称性,只要设两个距离函数就行了,记 A 、C 两脚与地面距离之和为 )(θf ,B 、D 两脚与地面距离之和为 )(θg .显然0)(≥θf 、0)(≥θg 。 因此椅子和地面的距离之和可令)()()(θθθg f h +=。由假设(2),)(x f 、)(x g 为连续函数,因此)(θh 也是连续函数;由假设(3),得:0)()(=θθg f 。则该问题归结为: 已知连续函数0)(≥θf 、0)(≥θg 且0)()(=θθg f ,至少存在一个0θ,使得: 0)()(00==θθg f 3.模型求解 (找出0θ) 证明:不妨设,0)0(>f 则0)0(=g 令2π θ=(即旋转o 90,对角线AC 和BD 互换)。则有0)2 (,0)2(>=π πg f
如何撰写数学建模论文
摘要(200-300字,包括模型的主要特点、建模方法和主要结果。) 关键词(求解问题、使用的方法中的重要术语) 内容较多时最好有个目录 1。问题重述 2。问题分析 3。模型假设与约定 4。符号说明及名词定义 5。模型建立与求解①补充假设条件,明确概念,引进参数;②模型形式(可有多个形式的模型); 6。进一步讨论(参数的变化、假设改变对模型的影响) 7。模型检验(使用数据计算结果,进行分析与检验) 8。模型优缺点(改进方向,推广新思想) 9。参考文献及参考书籍和网站 10。附录(计算程序,框图;各种求解演算过程,计算中间结果;各种图形、表格。) 小经验: 1。随时记下自己的假设。有时候在很合理的假设下开始了下一步的工作,就应该顺手把这个假设给记下来,否则到了最后可能会忘掉,而且这也会让我们的解答更加严谨。 2。随时记录自己的想法,而且不留余地的完全的表达自己的思想。 3。要有自己的特色,闪光点。 如何撰写数学建模论文 当我们完成一个数学建模的全过程后,就应该把所作的工作进行小结,写成论文。撰写数学建模论文和参加大学生数学建模时完成答卷,在许多方面是类似的。事实上数学建模竞赛也包含了学生写作能力的比试,因此,论文的写作是一个很重要的问题。 首先要明确撰写论文的目的。数学建模通常是由一些部门根据实际需要而提出的,也许那些部门还在经济上提供了资助,这时论文具有向特定部门汇报的目的,但即使在其他情况下,都要求对建模全过程作一个全面的、系统的小结,使有关的技术人员(竞赛时的阅卷人员)读了之后,相信模型假设的合理性,理解在建立模型过程中所用数学方法的适用性,从而确信该模型的数据和结论,放心地应用于实践中。当然,一篇好的论文是以作者所建立的数学模型的科学性为前提的。其次,要注意论文的条理性。 下面就论文的各部分应当注意的地方具体地来做一些分析。 (一)问题提出和假设的合理性 在撰写论文时,应该把读者想象为对你所研究的问题一无所知或知之甚少的一个群体,因此,首先要简单地说明问题的情景,即要说清事情的来龙去脉。列出必要数据,提出要解决的问题,并给出研究对象的关键信息的内容,它的目的在于使读者对要解决的问题有一个印象,以便擅于思考的读者自己也可以尝试解决问题。历届数学建模竞赛的试题可以看作是情景说明的范例。 对情景的说明,不可能也不必要提供问题的每个细节。由此而来建立数学模型还是不够
椅子能否放稳
1 椅子在不平的地面上能放稳吗 (一)问题的分析与假设 由三点构成一个平面可知,通常情况下,在不平的地面椅子是三只脚着地,如果要达到放稳的要求,必须是四只椅脚同时着地。问题中,椅子四脚呈长方形,在以下建模过程中,为方便讨论,我们作出以下假设: (1)椅子的四条腿一样长,椅脚与地面点接触,四角连线呈矩形; (2)地面高度连续变化,可视为数学上的连续曲面; (3)地面相对平坦,使椅子在任意位置至少三只脚同时着地。(二)模型的建立与求解 问题的解决,是通过建立直角坐标系,利用矩形的对角线平分且相等,以AC所在直线作为X轴,以垂至于AC的直线作为为Y轴,以矩形的中心点为原点建立直角坐标系。如图所示: 错误! 用对角线AC与X轴的夹角α表示椅子当前的位置,此时,可设椅脚与地面的距离是α的函数。椅子的四脚与地面应有四个距离的函数,但由于矩形的对称性,对角上的两点距离之和可用一个函数表示。设A,C两脚与地面的距离之和为,B,D两脚与地面的距离之和为。 已知地面是连续曲面,椅子可在任意位置至少三只脚着地,把已知条件转化为数学问题为已知,是连续函数,即α为任意值,·=0总成立;且。现只需证明存在α0,使。
现给出证明方法: 开始α=0,将椅子旋转角度大小为∠AOB=a,此时对角线AC和BD互换。由,知,。 令, 则有。 因为,为连续函数,所以也为连续函数,根据连续函数的基本性质,必存在α0使=0,即,又因为·=0,所以可得,证毕。 由证明的结果看,在不平的平面上,椅子呈矩形四脚距离地面的距离能同时为零,即椅子能在不平的地面放平稳。 若椅子的四脚呈等腰梯形,同理可证这样的椅子也能在不平的地面上放稳。