TMOD用法
定时计数器的结构与工作原理

定时器方式寄存器TMOD (不能按位寻址)
注意 TMOD只能以字节方式进行初始化
T1
T0
定时器方式寄存器TMOD (不能按位寻址)
振荡器
Tx端 TRx位 GATE位 01 INTx端
12 C/T=0
C/T=1
10
1&
≥1 与门
或门
计数器
控制=1 开关接通
TFx
申请 中断
GATE门控位: Timer可由软件与硬件两者控制 ▼ GATE = 0 ——普通用法
单片机的定时/计数器 -定时/计数器的结构与工作原理
秒表计时器
家用定时器ຫໍສະໝຸດ 智能计数器智能排插 计时器
定时/计数器的结构
▼ 2个16位计数器T0 (TH0、TL0)和T1 (TH1、TL1)——加1计数器 ▼ 8位特殊功能寄存器TMOD——选择定时/计数器的工作模式和工作方式 ▼ 8位特殊功能寄存器TCON ——控制定时器的启动与停止 ▼ 2个外部引脚T0(P3.4)和T1(P3.5)——接入外部计数脉冲
Timer的启/停由软件对TRx位写“1”/“0”控制
▼ GATE = 1 ——门控用法 (很少用到) Timer的启/停由软件对TRx位写“1”/“0” 和在INTx引脚上出现的信号的高/低共同控制
小 结
▼定时/计数器的内部结构与工作原理 ▼定时器控制寄存器TCON ▼定时器方式寄存器TMOD
D7
D0
TF1 TR1 TF0 TR0 IE1 IT1 IE0 IT0
▼ TFx: T0/T1计数溢出标志位。
=1 计数溢出; =0 计数未满 TFx标志位可用于申请中断或供CPU查询。
在进入中断服务程序时会自动清零; 但在查询方式时必须软件清零。
第06章 MCS-51单片机定时计数器

10
2 8位计数初值自动重装,TL(7 ~ 0)
TH(7 ~ 0)
11
3 T0运行,而T1停止工作,8位定时/计数。
▪ 2.定时/计数器控制寄存器(TCON)
位
D7 D6 D5 D4 D3 D2 D1 D0
位符号 TF1 TR1 TF0 TR0 IE1 IT1 IE0 IT0
TR0:定时 / 计数器0运行控制位。软件置位,软件复位。与GATE有关, 分两种情况:
GATE = 0 时:若TR0 = 1,开启T0计数工作;若TR0 = 0,停止T0计 数。
GATE = 1 时:若TR0 = 1 且/INT0 = 1时,开启T0计数; 若TR0 = 1 但 /INT0 = 0,则不能开启T0计数。 若TR0 = 0, 停止T0计数。
TR1:定时 / 计数器1运行控制位。用法与TR0类似。
▪ (1)计算计数初值。欲产生周期为1000μs的等宽方波脉冲, 只需在P1.7端交替输出500μs的高低电平即可,因此定时 时间应为500μs。设计数初值为X,则有:
▪ (216-X)×1×10-6=500×10-6
▪ X=65536-500=65036=FE0CH
▪ 将X的低8位0CH写入TL1,将X的高8位FEH写入TH1。
;清TCON,定时器中断标志清
▪
MOV TMOD,#10H
;工作方式1设定
▪
MOV TH1,#0FEH
;计数1初值设定
▪
MOV TL1,#0CH
▪
MOV IE,#00H
;关中断
▪
SETB TR1
;启动计数器1
▪ LOOP0:JBC TF1,LOOP1 ;查询是否溢出
▪
单片机复习资料

1.单片机的概念:在一块半导体芯片上,集成了微处理器、存储器、输入/输出接口、定时器/计数器以及中断系统等功能部件,构成一台完整的微型处理器。
(单片机是微机的一部分)2.单片机的组成:微处理器、存储器、输入/输出接口、定时器/计数器以及中断系统等功能部件。
3.输入/输出接口:可以输入/输出0V或5V的单元。
4.单片机的分类:MCS-51系列及与之兼容的80C51系列单片机、Atmel公司的A VR系列、Microchip公司的PIC系列、Motorola公司的单片机、TI公司MSP430系列单片机、基于ARM核的32位单片机5.微处理器芯片、存储器芯片与输入/输出接口电路芯片构成了微型计算机,芯片之间用总线(地址总线、数据总线、控制总线)连接。
6.单片机工作方式:正常方式、待机方式、掉电方式7.数制和码制,原码、反码与补码8.80C51系列单片机引脚功能:①主电源引脚(2条):Vcc(40脚)和GND(20脚)②外接晶体引脚(2条):XTAL1(19脚)、XTAL2(18脚)③输入/输出(I/O)引脚(32条):P0口(39脚~32脚)分别为P0.0~P0.7,其中P0.7为最高位,P0.0为最低位。
●作为通用输入/输出(I/O)口使用●作为低八位地址/数据分时复用总线P1口(1脚~8脚)分别为P1.0~P1.7,其中P1.7为最高位,P1.0为最低位。
●作为准双向I/O口使用●对52子系列单片机,P1.0引脚的第二功能为T定时器/计数器的外部输入,P1.1引脚的第二功能为T2EX捕捉、重装触发,即T2的外部控制端P2口(21脚~28脚)●准双向输入/输出接口,每一位也可独立控制●在接有片外存储器或扩展I/O接口时,P2口作为高八位地址总线P3口(10脚~17脚)●准双向输入/输出接口,每一位同样可独立控制●P3口除作为通用I/O口外,P3口的第二种功能定义如下(串口、定时、中断、读写表格):P3.0 RXD(串行数据输入口)P3.1 TXD(串行数据输出口)P3.2 INT0(外部中断0)P3.3 INT1(外部中断1)P3.4 T0(定时器/计数器0外部输入)P3.5 T1(定时器/计数器1外部输入)P3.6 WR(外部数据存储器写脉冲)P3.7 RD(外部数据存储器读脉冲)④控制引脚(4条)⑴ALE/PROG(30引脚):地址锁存允许/片内EPROM编程脉冲①ALE功能:用来锁存P0口送出的低8位地址②PROG功能:片内有EPROM的芯片,在EPROM编程期间,此引脚输入编程脉冲。
4-1 控制LED发光二极管隔1秒闪烁

任务4-1 控制LED发光二极管隔1秒闪烁
任务4-1 控制LED发光二极管隔1秒闪烁
1、任务要求: 任务要求: 通过P1.x口线控制外接的LED发光二极管亮1 P1.x口线控制外接的LED发光二极管亮 循环不止。 通过P1.x口线控制外接的LED发光二极管亮1秒、灭1秒,循环不止。 2、相关知识 实现1秒的时间定时可以使用我们之前给大家介绍的CJNE CJNE指令来实现多 实现1秒的时间定时可以使用我们之前给大家介绍的CJNE指令来实现多 层嵌套循环延时,但这种实现方法有两大缺陷: 层嵌套循环延时,但这种实现方法有两大缺陷: 占用了CPU资源; CPU资源 (1)占用了CPU资源; 定时精度低。 (2)定时精度低。 对于精确定时,一般需要采用定时/计数器来实现。 对于精确定时,一般需要采用定时/计数器来实现。 16位加法计数器 1)16位加法计数器 (Timer0)和 (Timer1); MCS-51单片机集成有两个定时 计数器, T0(Timer0) T1(Timer1) 单片机集成有两个定时/ MCS-51单片机集成有两个定时/计数器,即T0(Timer0)和T1(Timer1); 定时器和计数器的区别: 定时器和计数器的区别: 定时器与计数器从本质上来说是一致的,都是对脉冲计数,不同的是, 定时器与计数器从本质上来说是一致的,都是对脉冲计数,不同的是, 定时器是对单片机机器周期计数,而计数器则是对单片机引脚T0(P3.4) 定时器是对单片机机器周期计数,而计数器则是对单片机引脚T0(P3.4) 和引脚T1(P3.5)上的输入脉冲计数; T1(P3.5)上的输入脉冲计数 和引脚T1(P3.5)上的输入脉冲计数;
任务4-1 控制LED发光二极管隔1秒闪烁
②利用下面的表达式计算初值,写入TH0、TL0或TH1、TL1。 利用下面的表达式计算初值,写入TH0、TL0或TH1、TL1。 TH0 作计数器时:初值=最大计数值作计数器时:初值=最大计数值-计数次数 作定时器时:初值=最大计数值-定时时间/机器周期 作定时器时:初值=最大计数值-定时时间/ 机器周期=12/fosc(fosc是晶振频率) =12/fosc(fosc是晶振频率 【机器周期=12/fosc(fosc是晶振频率)】 最大计数值由选择的工作方式决定,可选2^13 方式0)、2^16 2^13( 2^16( 最大计数值由选择的工作方式决定,可选2^13(方式0)、2^16(方式 )、2^8 方式2 2^8( 的方式3 1)、2^8(方式2和T0 的方式3) 若定时/计数器工作在中断方式下,则通过对IE IE寄存器赋值开放相应 ③若定时/计数器工作在中断方式下,则通过对IE寄存器赋值开放相应 中断; 中断; TR0或TR1置 启动定时/计数器。若将GATE位设为1 GATE位设为 ④将TR0或TR1置1启动定时/计数器。若将GATE位设为1,用于检测送到 ________ ________ INT0/ INT1 引脚的正脉冲宽度,只有正脉冲送达中断引脚时才开始运行 引脚的正脉冲宽度, (不常用)。 不常用)。
AT89S52定时器T2

四.T2CON暫存器:TIMER2的控制暫存器,89S52除了有以上所述的TIMER0與TIMER1外,又多了一個TIMER2。
位址:C8HBitTF2:Timer 2溢位旗號,當Timer 2中斷時,CPU會將此位元設定為1,中斷結束後,CPU並不會將TF2清除為0,須以軟體清除之。
當RCLK=TCLK=1時,TF2不會被設定。
EXF2:Timer 2的外部旗號,當T2EX接腳(P1.1)輸入負緣信號且EXEN2=1,即進入捕入(Capture Mode)或自動載入模式(Auto-Reload Mode),此時EXF2將被設定為1,並產生Timer 2中斷,而中斷結束後,CPU並不會清除該位元為0,須以軟體清除之。
RCLK:串列埠接收時脈選擇位元,當RCLK=1時,串列埠將以Timer 2溢位脈波做為在Mode 1 或Mode 3模式時的接收時脈信號。
若RCLK=0時,則串列埠將以Timer 1溢位脈波做為接收的時脈信號。
TCLK:串列埠傳送時脈選擇位元,當RCLK=1時,串列埠將以Timer 2溢位脈波做為在Mode 1 或Mode 3模式時的傳送時脈信號。
若RCLK=0時,則串列埠將以Timer 1溢位脈波做為傳送的時脈信號。
EXEN2:Timer 2外部致能控制位元,當EXEN2=1時,若Timer 2未做為串列埠的時脈產生器且T2EX接腳(P1.1)輸入負緣觸發信號,即進入捕入(CaptureMode)或自動載入模式(Auto-Reload Mode)。
當EXEN2=0時,Tmer 2將不處理T2EX的信號。
TR2:Timer 2的啟動位元,TR2=1時啟動Timer 2,TR2=0時Timer 2停止計時。
C/2T:Timer 2計時計數切換開關,C/2T=1時為外部計數功能,以計數T2接腳(P1.0)所輸入的脈波信號。
若C/2T=0時為內部計時功能(OSC/12)。
CP/2RL,=1時,EXEN2=1且T2EX輸入負緣觸發信號,RL:Timer 2工作模式切換位元,當CP/2Timer2將產生捕入的功能,將TH2、TL2的值存入RCAP2H與RCAP2L。
定时计数器详解
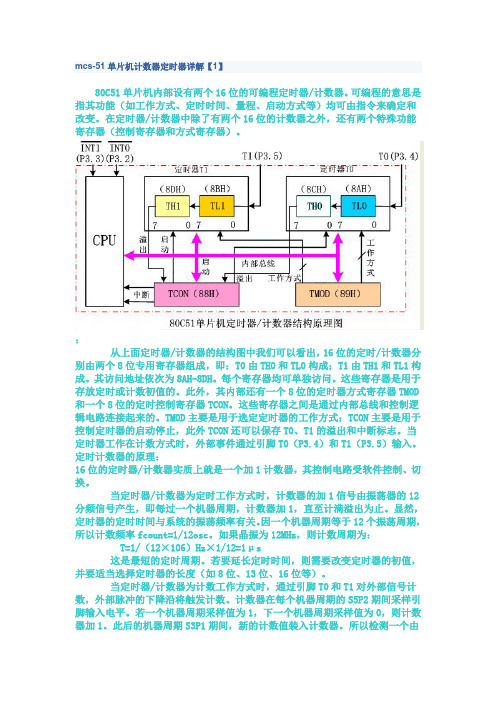
mcs-51单片机计数器定时器详解【1】80C51单片机内部设有两个16位的可编程定时器/计数器。
可编程的意思是指其功能(如工作方式、定时时间、量程、启动方式等)均可由指令来确定和改变。
在定时器/计数器中除了有两个16位的计数器之外,还有两个特殊功能寄存器(控制寄存器和方式寄存器)。
:从上面定时器/计数器的结构图中我们可以看出,16位的定时/计数器分别由两个8位专用寄存器组成,即:T0由TH0和TL0构成;T1由TH1和TL1构成。
其访问地址依次为8AH-8DH。
每个寄存器均可单独访问。
这些寄存器是用于存放定时或计数初值的。
此外,其内部还有一个8位的定时器方式寄存器TMOD和一个8位的定时控制寄存器TCON。
这些寄存器之间是通过内部总线和控制逻辑电路连接起来的。
TMOD主要是用于选定定时器的工作方式;TCON主要是用于控制定时器的启动停止,此外TCON还可以保存T0、T1的溢出和中断标志。
当定时器工作在计数方式时,外部事件通过引脚T0(P3.4)和T1(P3.5)输入。
定时计数器的原理:16位的定时器/计数器实质上就是一个加1计数器,其控制电路受软件控制、切换。
当定时器/计数器为定时工作方式时,计数器的加1信号由振荡器的12分频信号产生,即每过一个机器周期,计数器加1,直至计满溢出为止。
显然,定时器的定时时间与系统的振荡频率有关。
因一个机器周期等于12个振荡周期,所以计数频率fcount=1/12osc。
如果晶振为12MHz,则计数周期为:T=1/(12×106)Hz×1/12=1μs这是最短的定时周期。
若要延长定时时间,则需要改变定时器的初值,并要适当选择定时器的长度(如8位、13位、16位等)。
当定时器/计数器为计数工作方式时,通过引脚T0和T1对外部信号计数,外部脉冲的下降沿将触发计数。
计数器在每个机器周期的S5P2期间采样引脚输入电平。
若一个机器周期采样值为1,下一个机器周期采样值为0,则计数器加1。
MCS-51定时计数器的应用.

方案选择: (1)怎样实现较长时间的定时?
上一个实验已经讨论了单片机定时器的最大时间间 隔,采用定时器与计数器相结合的方法解决了较长时 间定时的问题
这里还可用另一种方法解决:用T1作定时器,用软件 对定时时间到计数,这样可节省一个定时器作其它用
如果设T1为定时方式0,定时间隔选为10ms,那么要想 达到2秒的定时,软件计数的次数应该是200次。
第四章 MCS-51定时/计数器的应用 定时/计数器是单片机应用中的重要部件,
其工作方式的灵活应用对提高编程技巧, 减轻CPU的负担和简化外围电路有很大益 处。本章通过两个实验说明定时/计数器的 基本用法,通过应用实例,使读者掌握定 时/计数器的软件设计技巧。
1
一、定时/计数器的基本用法
【实验1】利用T0定时,T1计数 二者复合的方法,实现较长 时间的定时间隔。 实验要求:如图所示,在 P1.7 端 接 有 一 个 发 光 二 极 管 , 要 利 用 定 时 控 制 使 LED 亮一秒停一秒,周而复始。
注意:T0与T1都是加1计数器,所以初值应按补码 计算。实际计算方法是:假定初值为X,若定时间隔 100ms,应该有
(216-X) ·2μ S=100ms ∴x=15536=3CB0H 3CH装入TH0,B0H装入TL0 T1 计 数 器 在 方 式 2 下 是 8 位 的 , 计 数 5 次 的 初 值 的 是 (256-5)=251=FBH,同时装入TH1与TL1。
=216·2μ S=131.07ms 3
而实验要求定时间隔为1秒,这三种方式都不能 满足。对于较长的定时间隔应采取复合的办法。 例如,可将T0设成定时间隔为100ms(只能用方式1), 当定时时间到,将P1.0的输出反相,再加到T1端作 计数脉冲,需要定时两次才构成一个完整的计数脉 冲,因此设T1计数5次,就能完成1秒的定时:
tmodloader启用规则
tmodloader启用规则
TModLoader是一个用于Terraria的Mod加载器,它允许玩家轻松地安装、管理和运行各种Mod。
在使用TModLoader时,需要遵守一些规则以确保游戏的稳定性和公平性。
首先,要确保你下载的Mod是兼容TModLoader的。
在安装Mod 之前,最好仔细阅读Mod的描述和相关信息,以确保它与你当前使用的TModLoader版本兼容。
其次,要注意Mod的加载顺序。
有些Mod可能会有依赖关系,需要按照特定的顺序加载才能正常运行。
确保你了解每个Mod的加载顺序要求,并按照要求进行设置。
另外,要注意Mod的冲突。
有些Mod可能会有冲突,导致游戏崩溃或者出现其他问题。
在安装新的Mod时,要留意是否与已有的Mod存在冲突,并及时解决冲突问题。
此外,要注意Mod的来源。
建议从官方或者可靠的来源下载Mod,以确保其安全性和稳定性。
避免从不明来源下载Mod,以免造成不必要的风险。
最后,要遵守游戏社区的规定和守则。
在使用Mod时,要尊重其他玩家的游戏体验,避免使用影响游戏平衡或者违反游戏规则的Mod。
总的来说,使用TModLoader时,要注意Mod的兼容性、加载顺序、冲突问题、来源可靠性以及遵守游戏社区规定,以确保游戏的稳定和公平性。
希望这些信息能帮助你更好地使用TModLoader。
tmodloaderfatal error

tmodloaderfatal errorTModLoader是用于安装和管理MOD的工具,是Terraria游戏的玩家所需的扩展和自定义内容的集合。
然而,有时用户可能会遇到“TModLoader Fatal Error”的问题,这可能会阻止用户正常的游戏体验。
下面是与TModLoader Fatal Error相关的参考内容,帮助您了解和解决这个问题。
1. 什么是"TModLoader Fatal Error"?"TModLoader Fatal Error"是指在运行TModLoader时遇到的严重错误。
这个错误会导致游戏崩溃或无法启动,可能的原因包括加载冲突的MOD、不兼容的MOD版本、缺少或损坏的文件等。
2. 如何解决"TModLoader Fatal Error"?(1) 检查MOD冲突:首先,查看TModLoader日志文件,找到错误报告,并确认是否存在MOD之间的冲突。
通过在MOD管理器中禁用或删除冲突的MOD来解决这个问题。
(2) 更新MOD和TModLoader版本:确保您的MOD和TModLoader是最新版本。
有时,旧的MOD可能与最新版的TModLoader不兼容,导致错误。
更新MOD和TModLoader 可能会解决这个问题。
(3) 修复缺少或损坏的文件:检查TModLoader依赖的文件是否存在,并确保它们没有损坏。
有时,文件可能会被误删或损坏,导致TModLoader出现致命错误。
重新安装TModLoader 并验证游戏文件完整性可能会修复这个问题。
(4) 删除无效MOD:有时,您可能已经安装了一些无效的MOD,这些MOD不再被支持或有错误。
删除这些MOD可能会解决TModLoader致命错误。
(5) 防止与其他软件的冲突:确保您的计算机上没有其他可能与TModLoader冲突的软件运行。
有些防病毒软件或防火墙可能会阻止TModLoader运行,导致致命错误。
单片机实验报告(相当不错,有具体实验结果分析哦)
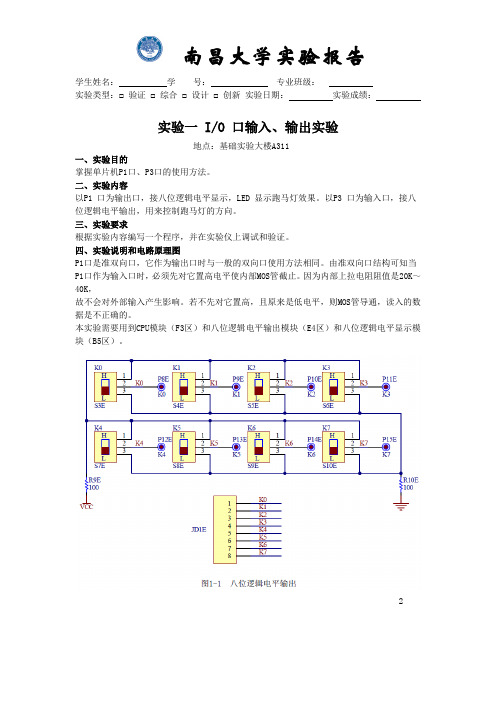
学生姓名:学号:专业班级:实验类型:□ 验证□ 综合□ 设计□ 创新实验日期:实验成绩:实验一 I/O 口输入、输出实验地点:基础实验大楼A311一、实验目的掌握单片机P1口、P3口的使用方法。
二、实验内容以P1 口为输出口,接八位逻辑电平显示,LED 显示跑马灯效果。
以P3 口为输入口,接八位逻辑电平输出,用来控制跑马灯的方向。
三、实验要求根据实验内容编写一个程序,并在实验仪上调试和验证。
四、实验说明和电路原理图P1口是准双向口,它作为输出口时与一般的双向口使用方法相同。
由准双向口结构可知当P1口作为输入口时,必须先对它置高电平使内部MOS管截止。
因为内部上拉电阻阻值是20K~40K,故不会对外部输入产生影响。
若不先对它置高,且原来是低电平,则MOS管导通,读入的数据是不正确的。
本实验需要用到CPU模块(F3区)和八位逻辑电平输出模块(E4区)和八位逻辑电平显示模块(B5区)。
2学生姓名:学号:专业班级:实验类型:□ 验证□ 综合□ 设计□ 创新实验日期:实验成绩:五、实验步骤1)系统各跳线器处在初始设置状态。
用导线连接八位逻辑电平输出模块的K0 到CPU 模块的RXD(P3.0 口);用8 位数据线连接八位逻辑电平显示模块的JD4B 到CPU 模块的JD8(P1 口)。
2)启动PC 机,打开THGMW-51 软件,输入源程序,并编译源程序。
编译无误后,下载程序运行。
3)观察发光二极管显示跑马灯效果,拨动K0 可改变跑马灯的方向。
六、实验参考程序本实验参考程序:;//******************************************************************;文件名: Port for MCU51;功能: I/O口输入、输出实验;接线: 用导线连接八位逻辑电平输出模块的K0到CPU模块的RXD(P3.0口);;用8位数据线连接八位逻辑电平显示模块的JD2B到CPU模块的JD8(P1口)。
广州周立功单片机发展有限公司 P89LV51RD2 微控制器手册说明书
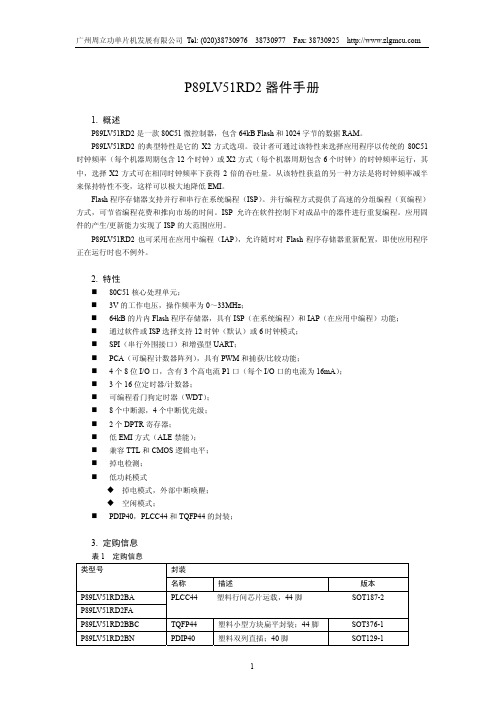
P89LV51RD2器件手册1. 概述P89LV51RD2是一款80C51微控制器,包含64kB Flash和1024字节的数据RAM。
P89LV51RD2的典型特性是它的X2方式选项。
设计者可通过该特性来选择应用程序以传统的80C51时钟频率(每个机器周期包含12个时钟)或X2方式(每个机器周期包含6个时钟)的时钟频率运行,其中,选择X2方式可在相同时钟频率下获得2倍的吞吐量。
从该特性获益的另一种方法是将时钟频率减半来保持特性不变,这样可以极大地降低EMI。
Flash程序存储器支持并行和串行在系统编程(ISP)。
并行编程方式提供了高速的分组编程(页编程)方式,可节省编程花费和推向市场的时间。
ISP允许在软件控制下对成品中的器件进行重复编程。
应用固件的产生/更新能力实现了ISP的大范围应用。
P89LV51RD2也可采用在应用中编程(IAP),允许随时对Flash程序存储器重新配置,即使应用程序正在运行时也不例外。
2. 特性80C51核心处理单元;3V的工作电压,操作频率为0~33MHz;64kB的片内Flash程序存储器,具有ISP(在系统编程)和IAP(在应用中编程)功能;通过软件或ISP选择支持12时钟(默认)或6时钟模式;SPI(串行外围接口)和增强型UART;PCA(可编程计数器阵列),具有PWM和捕获/比较功能;4个8位I/O口,含有3个高电流P1口(每个I/O口的电流为16mA);3个16位定时器/计数器;可编程看门狗定时器(WDT);8个中断源,4个中断优先级;2个DPTR寄存器;低EMI方式(ALE禁能);兼容TTL和CMOS逻辑电平;掉电检测;低功耗模式掉电模式,外部中断唤醒;空闲模式;PDIP40,PLCC44和TQFP44的封装;3. 定购信息表1 定购信息类型号封装名称描述版本P89LV51RD2BAPLCC44 塑料行间芯片运载,44脚 SOT187-2P89LV51RD2FAP89LV51RD2BBC TQFP44塑料小型方块扁平封装;44脚SOT376-1P89LV51RD2BN PDIP40塑料双列直插;40脚SOT129-1表2 定购选项类型号 温度范围 频率P89LV51RDBA 0℃~+70℃ P89LV51RD2FA -40℃~+85℃ P89LV51RD2BBC 0℃~+70℃ P89LV51RD2BN 0℃~+70℃0~33MHz4.功能框图图1 P89LV51RD2功能框图5.1 管脚RSTNCINT0/P3.2T0/P3.4T1/P3.5图2PLCC44管脚配置INT0/P3.2INT1/P3.3图4 TQFP44管脚配置5.2 管脚描述表3 P89LV51RD2管脚描述管脚符号DIP40 TQFP44 PLCC44类型描述P0.0~P0.7 39~32 37~30 43~36 I/O P0口:P0口是一个开漏双向I/O口。
C语言几种关键运算符详解
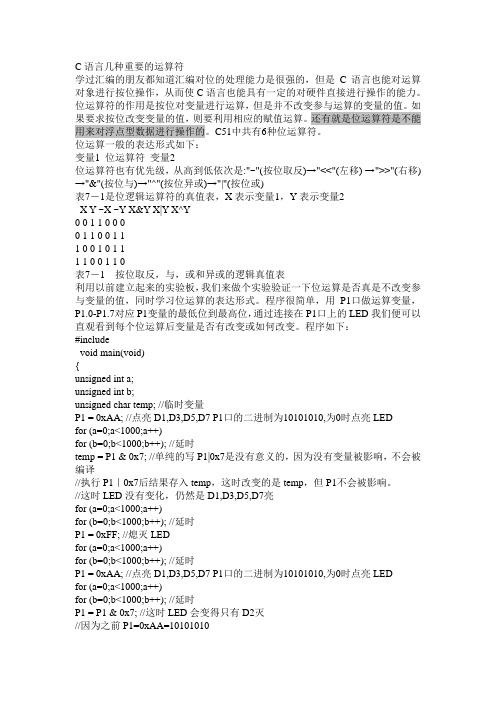
C语言几种重要的运算符学过汇编的朋友都知道汇编对位的处理能力是很强的,但是C语言也能对运算对象进行按位操作,从而使C语言也能具有一定的对硬件直接进行操作的能力。
位运算符的作用是按位对变量进行运算,但是并不改变参与运算的变量的值。
如果要求按位改变变量的值,则要利用相应的赋值运算。
还有就是位运算符是不能用来对浮点型数据进行操作的。
C51中共有6种位运算符。
位运算一般的表达形式如下:变量1 位运算符变量2位运算符也有优先级,从高到低依次是:"~"(按位取反)→"<<"(左移) →">>"(右移) →"&"(按位与)→"^"(按位异或)→"|"(按位或)表7-1是位逻辑运算符的真值表,X表示变量1,Y表示变量2X Y ~X ~Y X&Y X|Y X^Y0 0 1 1 0 0 00 1 1 0 0 1 11 0 0 1 0 1 11 1 0 0 1 1 0表7-1按位取反,与,或和异或的逻辑真值表利用以前建立起来的实验板,我们来做个实验验证一下位运算是否真是不改变参与变量的值,同时学习位运算的表达形式。
程序很简单,用P1口做运算变量,P1.0-P1.7对应P1变量的最低位到最高位,通过连接在P1口上的LED我们便可以直观看到每个位运算后变量是否有改变或如何改变。
程序如下:#includevoid main(void){unsigned int a;unsigned int b;unsigned char temp; //临时变量P1 = 0xAA; //点亮D1,D3,D5,D7 P1口的二进制为10101010,为0时点亮LEDfor (a=0;a<1000;a++)for (b=0;b<1000;b++); //延时temp = P1 & 0x7; //单纯的写P1|0x7是没有意义的,因为没有变量被影响,不会被编译//执行P1|0x7后结果存入temp,这时改变的是temp,但P1不会被影响。
第1章 51单片机结构

增强型(52子系列)
8032、8052、8752、89C52、89S52等。它们的结构基本相同,其主
要差别反映在存储器的配置上。
8031片内没有程序存储器除了老产品,已被淘汰。 8051内部设有4KB的掩模ROM程序存储器 8751是将8051片内的ROM换成EPROM
89C51则换成4KB的闪速EEPROM
1.3特殊功能寄存器
MCS-51单片机共有21个字节的特殊功能寄存器用英文缩 写SFR (Special Fuction Register)表示。 1.用途:
A 累加器、状态标志寄存器 单片机内部各部件专用的控制、状态寄存器 并行口、串行口影射寄存器
2.地址空间:
21个特殊功能器不连续的分布在80H~FFH 128个字节地址 空间,见表1-2。
89S51结构同89C51, 4KB的闪速EEPROM可在线编程
增强型的存储容量为普通型的一倍
本课以 8XX51 代表这一系列的单片机。 (8051)
51系列单片机内部结构如图1-1所示。
基准频率源 计数脉冲
振荡器及 定时电路
4KB/8KB 程序存储器
128/256B
数据存储器
2/3个16位 定时/计数器
8031单片机无内部程序存储器,地址从0000H~FFFFH都
是外部程序存储空间。 EA 应始终接地。由于程序必须存放在 存储器中,因此它必须外接程序存储器才能使用,因此,已
被淘汰。
对于内部有ROM的单片机(51、52系列) , 引脚接高电平,使程序从内部ROM开始执行。当PC值超 EA 出内部ROM的容量时,会自动转向外部程序存储器空间。外 部程序存储器地址空间为1000H~FFFFH。
module语法
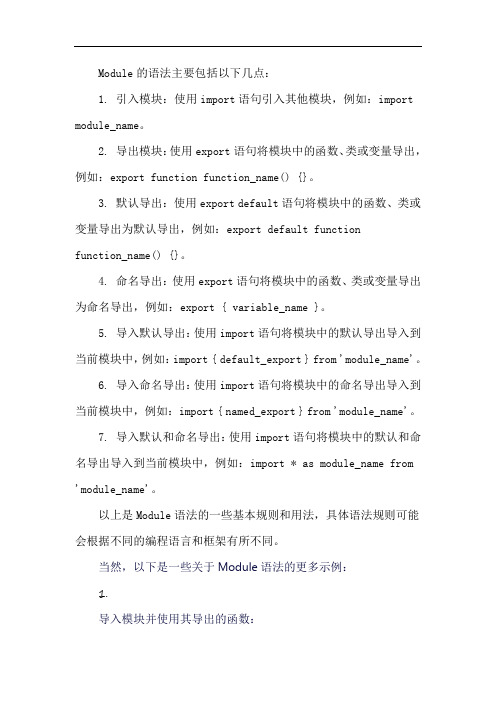
Module的语法主要包括以下几点:1. 引入模块:使用import语句引入其他模块,例如:import module_name。
2. 导出模块:使用export语句将模块中的函数、类或变量导出,例如:export function function_name() {}。
3. 默认导出:使用export default语句将模块中的函数、类或变量导出为默认导出,例如:export default functionfunction_name() {}。
4. 命名导出:使用export语句将模块中的函数、类或变量导出为命名导出,例如:export { variable_name }。
5. 导入默认导出:使用import语句将模块中的默认导出导入到当前模块中,例如:import { default_export } from 'module_name'。
6. 导入命名导出:使用import语句将模块中的命名导出导入到当前模块中,例如:import { named_export } from 'module_name'。
7. 导入默认和命名导出:使用import语句将模块中的默认和命名导出导入到当前模块中,例如:import * as module_name from 'module_name'。
以上是Module语法的一些基本规则和用法,具体语法规则可能会根据不同的编程语言和框架有所不同。
当然,以下是一些关于Module语法的更多示例:1.导入模块并使用其导出的函数:2.javascript复制代码import { add } from'./math';const result = add(2, 3);console.log(result); // 输出 51.导入模块并使用其默认导出:2.javascript复制代码import math from './math';const result = math.add(2, 3);console.log(result); // 输出 51.导入模块并使用其命名导出:2.javascript复制代码import { add, subtract } from './math';const result1 = add(2, 3);const result2 = subtract(5, 1);console.log(result1); // 输出 5console.log(result2); // 输出 4 1.使用模块的默认导出:2.javascript复制代码import math from './math';const result = math.add(2, 3);console.log(result); // 输出 51.使用模块的命名导出:2.javascript复制代码import { add, subtract } from'./math';const result1 = add(2, 3);const result2 = subtract(5, 1);console.log(result1); // 输出 5console.log(result2); // 输出 4 1.使用模块的默认和命名导出:2.javascript复制代码import * as math from './math';const result1 = math.add(2, 3);const result2 = math.subtract(5, 1);console.log(result1); // 输出 5console.log(result2); // 输出 4。
单片机定时器的高级用法

#define DWORD_ROTATE_LEFT(dw, n) _lrol_(dw, n)
#define DWORD_ROTATE_RIGHT(dw, n) _lror_(dw, n)
#define ENABLE_ALL_INTERRUPTS() (EA = 1)
typedef unsigned long DWORD;
typedef float FLOAT;
typedef char CHAR;
typedef unsigned char UCHAR;
typedef int INT;
typedef unsigned int UINT;
typedef unsigned long ULONG;
#define MAKEDWORD(lo, hi) ((DWORD)(((WORD)(lo)) | ((DWORD)((WORD)(hi))) << 16))
#define LOWORD(l) ((WORD)(l))
#define HIWORD(l) ((WORD)(((DWORD)(l) >> 16) & 0xFFFF))
#warning **********************************************************************************
#warning !! make sure MAX_TIMER_EVENT_NUM and TIMER0_BASE_INTERVAL has appropriate value!!
return FALSE;
TMOD用法

TMOD用法
首先,TMOD是定时器/计数器模式控制寄存器(TIMER/COUNTER MODE CONTROL REGISTER);其中低四位定义定时器/计数器T0,高四位定义定时器/计数器T1,各位的说明:Ⅰ,GATE——门控制。
●GATE=1时,由外部中断引脚INT0、INT1来启动定时器T0、T1。
当INT0引脚为高电平时TR0置位,启动定时器T0;当INT1引脚为高电平时TR1置位,启动定时器T1。
●GATE=0时,仅由TR0,TR1置位分别启动定时器T0、T1。
Ⅱ,C/T——功能选择位C/T=0时为定时功能,C/T=1时为计数功能。
置位时选择计数功能,清零时选择定时功能。
Ⅲ,M0、M1——方式选择功能由于有2位,因此有4种工作方式=================================
=============================== M1M0 工作方式计数器模式TMOD(设置定时器模式) 0 0 方式0 13位计数器TMOD=0x00 0 1 方式1 16位计数器TMOD=0x01 1 0 方式2 自动重装8位计数器TMOD=0x02 1 1 方式3 T0分为2个8位独立计数器,T1为无中断重装8位计数器
TMOD是一个8位的专用寄存器,其字节地址是89H,不能进行位寻址,系统复位后其所有位均为0。
TMOD用于控制T1和T0的操作模式及工作方,各位分布如下
最高位至最低位一次为GATE C/T M1 M0,第四位同高四位,高四位控制T1,第四位控制T0,GATE位通常为0,C/T为零为定时模式,为一为计数模式,M1,M0为00时工作在方式0,01工作方式1,10工作方式2。
MCS-51定时计数器的应用

4
TMOD——方式控制字 方式控制字 由于LED的亮 灭是持续不断的 所以可以将 的亮/灭是持续不断的 所以可以将T1 由于 的亮 灭是持续不断的,所以可以将 计数器设成方式2,自动装入初值 重复进行计数 计数器设成方式 自动装入初值,重复进行计数, 自动装入初值 重复进行计数, T0计数器设成定时方式 、按这种方案考虑: 计数器设成定时方式1 按这种方案考虑: 计数器设成定时方式 TMOD的初值应该是 61H 的初值应该是: 的初值应该是 0 1 1 0 0 0 0 1
第四章 MCS-51定时/计数器的应用 定时/计数器是单片机应用中的重要部件, 其工作方式的灵活应用对提高编程技巧, 减轻CPU的负担和简化外围电路有很大益 处。本章通过两个实验说明定时/计数器的 基本用法,通过应用实例,使读者掌握定 时/计数器的软件设计技巧。
1
一、定时/计数器的基本用法 定时 计数器的基本用法
11
T1的定时初值应按下式计算(方式0为13位计数器) 的定时初值应按下式计算(方式0 13位计数器) 位计数器 10ms (213-X)·2μs=10ms 2μs=10 ∴X=3192=0110001111000B ∴X=3192=0110001111000B 3192 由于TL1 只装5 其余8 位装入TH 因此0 78H TH1 由于 TL1 只装 5 位 , 其余 8 位装入 TH1, 因此 0C78H TL 装入TH 时应特别小心。 装入TH1和TL1时应特别小心。 11000B 01100011 11000B I-TH1—-I I-TL1-I 实际装入情况是:63H装入TH 18H 实际装入情况是:63H装入TH1,18H 入TL1。 软件计数200= 软件计数200=0C8H 200
12
单片机常用英语词汇

单片机常用英语单词中文名称; 英文名称; ;简记术语单片机; Single Chip Micocomputer or MicoControler Unit ;SCM or MCU在线烧录(往芯片写入程序);In System Programming ; ISP在线仿真;In Circuit Enulator ;ICE复位;reset ;RST编程选通使能端;Program Strobe Enable ; PSEN看门狗;WatchDog数据指针寄存器;Data Pointer Register; DP特殊用途寄存器;Special Purpose Register; SPRPSW寄存器; PassWord Register; PSW奇偶校检位P位; ParityBit溢出位OV位; Overflow寄存器组选择位; Register Select; RS(0/1)进位校检位;堆栈指针; StackPointer; SP堆栈;stanck推入;push弹出;popIE中断寄存器;Interrupt Register ; IE溢出中断;Overflow Interrupt计(时)数器;Timer计数器高位;TimerHigh Bit ;TH计数器低位; TimerLow Bit ;TL计数器模式控制寄存器; Timer Model Control Register; TMOD 计数器控制寄存器; Timer Model Control Register; TCON 串行端口控制寄存器; Serial Control Regiter ; SCON串行模式控制寄存器; Serial Model Control Register; SMOD开始位;Start Bit 结束位;Stop Bit 字节数据高位;MSB 字节数据低位; LSB传输控制寄存器; Pass Control Register; PCON停止运行设置位; Power Down Bit; PD位闲置模式设置位; Idel Model Set Bit; IDL位辅助寄存器; AUXR闲置模式下看门狗控制位; Watchdog idle model control bit;WDIDLE看门狗复位; Watchdog reset中断服务程序; Interruput Service Routine宏; macro寄存器组; Register Bank中断优先级寄存器; Interrupt Register波特率; Baud Rate中断向量; interrupt vector数据校检; Data Polling计数器溢出; TimeroverFlow ; TF串行时钟信号;Serial Clock singal; SCK看门狗重置寄存器; WatchdogTimer Reset SFR; WDTRST SFR ;UART移位寄存器锁存器串行锁存器;SBUF堆栈随机存储器; Stanck RAM ;SRAM脉宽;Purse Width Model ;PWM应用中编程; In Application Programing ;IAP数据总线DB模拟/数字信号转换;A/D个人计算机;PC读写控制线;CB总线;BUS晶体振荡器频率;fosc 机器周期;MC状态周期; S 拍;P输入/输出;I/O电源正极;VCC电源负极;VSS /GND 外加电源;VPD插座;JP主器件发送-从器件接收数据口;MOSI(P1.5)主器件接收-从器件发送数据口;MOSO(P1.6)IT0/T1 串行输入口;RXO 串行输出口;TXD 累加器;ACC程序状态字;PSW紫外线擦除存储器;EPROM 只读存储器;ROM随机存储器;RAM可编程控制器;PROM电擦除存储器;EEPROM 门控位;GATE串行数据线;SDA 串行时钟线;SCL IC器件间;I2CCentral Processing Unit 中央处理器CPURead Only Memory 只读存储器ROMErasable Programmable ROM 可擦除可编程只读存储器EPROMRandom-Access Memory 随机存取存储器RAMInput / Output 输入/输出I/O Interface 接口Port 端口Arithmetic Logical Unit 算术逻辑单元ALUAccumulator 累加器ACC程序状态字Carry 进位标志位 C Auxiliary Carry ACWorking Register Bank Selection Bit 1 / 0 工作寄存器区选择RS1 / RS0Overflow 溢出OV Parity 奇偶性P Program Counter 程序计数器PC Data Pointer 数据指针DPTR Stack 堆栈Stack Pointer 堆栈指针SPSpecial Function Register 特殊功能寄存器SFRProgram Store Enable 访问外部程序存储器选通PSENAddress Latch Enable 地址锁存允许ALEExternal Access 访问外部程序存储器EAReset 复位RSTCrystal 石英晶体XTAL Receive Data 串行接收RXD Transmit Data 串行发送TXD Interrupt 中断INT Timer, Counter 定时器,计数器Write 写WRRead 读RDAddress Bus 地址总线AB Control Bus 控制总线CB Data Bus 数据总线DB The Low byte of DPTR DPLThe High byte of DPTR DPHThe Low byte of T0 / T1 TL0 / TL1The High byte of T0 / T1 TH0 / TH1Power Control 电源控制PCON Timer / Counter Control T/C控制TCON Timer / Counter Mode T/C模式TMOD1.microcontroller 微控制器2.microprocessor 微处理器3.integrated circuit 集成电路4.processor core 内核5.peripheral 外围设备6.chip芯片7.embedded application/system 嵌入式应用/系统8.Mixed signal 复合信号9.analog模拟Serial Buffer 串行数据缓冲器SBUFSerial Port Control 串行口控制SCON Interrupt Enable 中断允许IEInterrupt Priority 中断优先级IP Idle空闲IDL Power Down 掉电PDClock Cycle 时钟周期Machine Cycle 机器周期Instruction Cycle指令周期ponent 元件;组成11.power consumption 功耗、能耗12.interrupt 中断13.external 外部的14.internal 内部的15.package 封装16.flash memory 闪存17.semiconductor 半导体18.interrupt service routine (ISR) 中断例程19.overflow 溢出20.hardware 硬件21.software 软件22.interface 接口23.general purpose input/output (GPIO) 通用输入/输出24.sensor 传感器25.analog-to-digital converter (ADC) 模数转换器26.t imer 计时器、定时器27.r egister 寄存器28.Serial Interface (SI) 串行接口29.P arallel Interface (PI) 并行接口30.bus 总线 网络32.circuit 电路33.Central Processing Unit (CPU) 中央处理器34.discrete 分立元件;离散的35.clock generator 时钟发生器36.crystal oscillator 晶振piler 编译器38.simulator 模拟器,仿真器39.I nterrupt latency 中断延迟40.buffer 缓冲器41.interrupt nesting 中断嵌套42.priority level 优先级43.accumulator 累加器44.synchronous 同步的45.asynchronous 异步的46.shift register 移位寄存器47.configuration 配置48.clock frequency 时钟频率49.I ntegrated Development Environment (IDE) 集成开发环境50.executable 可执行的51.instruction 指令,用法说明52.built-in 内置,嵌入的53.r eset 复位54.bootstrap loader 引导程序parator 比较器56.in-circuit debugging 仿真调试57.interrupt resource 中断源58.instruction set 指令集59.addressing mode 寻址方式60.division 除法61.multiplication 乘法62.subtraction 减法63.addition 加法64.Reduced Instruction Set Computer (RISC) 精简指令集65.encode 编码,编码器66.decode 译码,解码67.operand 操作数,运算对象68.load 加载69.mainframe 主机70.offset 偏移量71.parameter 参数,系数72.immediate addressing 立即寻址73.direct addressing 直接寻址74.r egister addressing 寄存器寻址75.r egister indirect addressing 寄存器间接寻址76.indexed addressing 变址寻址77.r elative addressing 相对寻址78.decrement (DEC) 渐减79.increment (INC) 渐加80.binary 二进制81.octal system 八进制82.decimal 十进制83.hexadecimal 十六进制84.Exclusive-or (XOR) 逻辑异或85.XNOR 逻辑同或86.r otate 循环plement 补集,补码88.Boolean 布尔89.subroutine 子程序90.branch 分支bel 标号92.input 输入93.output 输出94.array 数组,阵列tch 锁存器96.low-order 低位97.high-order 高位98.peripheral device 外围设备99.low end 低端100.high end 高端101.low power 低功耗102.high power 大功率103.integrated circuit (IC) 集成电路104.oscilloscope 示波器105.Least Significant Bit (LSB) 最低有效位106.M ost Significant Bit (MSB) 最高有效位107.active high 高电位有效108.active low 低电位有效109.capacitor 电容110.resistor 电阻111.inductor 电感112.variable resistor 可变电阻113.full-duplex 全双工114.half-duplex 半双工115.on-chip 片上116.off-chip 片外117.Variance 方差。
单片机指令表汇总
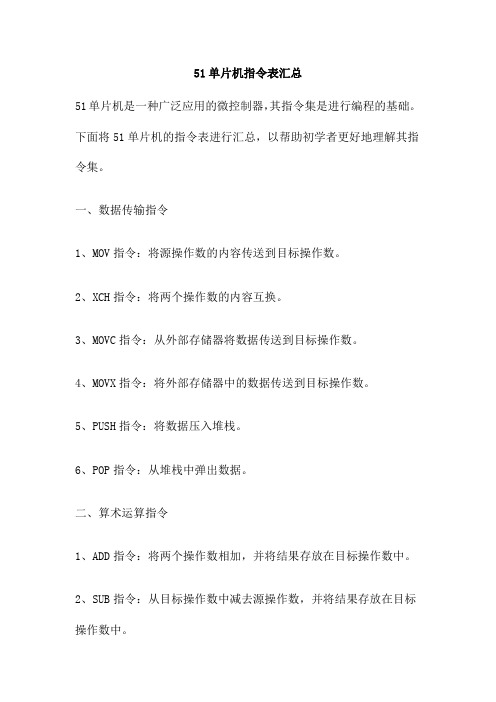
51单片机指令表汇总51单片机是一种广泛应用的微控制器,其指令集是进行编程的基础。
下面将51单片机的指令表进行汇总,以帮助初学者更好地理解其指令集。
一、数据传输指令1、MOV指令:将源操作数的内容传送到目标操作数。
2、XCH指令:将两个操作数的内容互换。
3、MOVC指令:从外部存储器将数据传送到目标操作数。
4、MOVX指令:将外部存储器中的数据传送到目标操作数。
5、PUSH指令:将数据压入堆栈。
6、POP指令:从堆栈中弹出数据。
二、算术运算指令1、ADD指令:将两个操作数相加,并将结果存放在目标操作数中。
2、SUB指令:从目标操作数中减去源操作数,并将结果存放在目标操作数中。
3、MUL指令:将两个操作数相乘,并将结果存放在目标操作数中。
4、DIV指令:将目标操作数除以源操作数,并将结果存放在目标操作数中。
5、ANL指令:对目标操作数和源操作数进行按位与运算,并将结果存放在目标操作数中。
6、ORL指令:对目标操作数和源操作数进行按位或运算,并将结果存放在目标操作数中。
7、XRL指令:对目标操作数和源操作数进行按位异或运算,并将结果存放在目标操作数中。
8、CPL指令:对目标操作数进行按位取反运算,并将结果存放在目标操作数中。
9、INC指令:将目标操作数加1。
10、DEC指令:将目标操作数减1。
11、ASR指令:将目标操作数右移n位,最高位用符号位补齐。
12、LSR指令:将目标操作数右移n位,最低位用0补齐。
13、ROL指令:将目标操作数循环左移n位,最高位移入最低位。
14、ROR指令:将目标操作数循环右移n位,最低位移入最高位。
单片机汇编指令表一、概述在单片机的世界里,汇编语言扮演着举足轻重的角色。
它是一种低级语言,能够直接与硬件进行交互,提供高效的代码执行效率。
下面,我们将详细列出一些常见的单片机汇编指令,以及它们的功能。
二、指令表1、MOV指令:用于将数据从一个寄存器移动到另一个寄存器。
例如,MOV R1, R2将把 R2的内容移动到 R1中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
首先,TMOD是定时器/计数器模式控制寄存器(TIMER/COUNTER MODE CONTROL REGISTER);其中低四位定义定时器/计数器T0,高四位定义定时器/计数器T1,各位的说明:Ⅰ,GATE——门控制。
●GATE=1时,由外部中断引脚INT0、INT1来启动定时器T0、T1。
当INT0引脚为高电平时TR0置位,启动定时器T0;当INT1引脚为高电平时TR1置位,启动定时器T1。
●GATE=0时,仅由TR0,TR1置位分别启动定时器T0、T1。
Ⅱ,C/T——功能选择位C/T=0时为定时功能,C/T=1时为计数功能。
置位时选择计数功能,清零时选择定时功能。
Ⅲ,M0、M1——方式选择功能由于有2位,因此有4种工作方式=================================
=============================== M1M0 工作方式计数器模式TMOD(设置定时器模式) 0 0 方式0 13位计数器TMOD=0x00 0 1 方式1 16位计数器TMOD=0x01 1 0 方式2 自动重装8位计数器TMOD=0x02 1 1 方式3 T0分为2个8位独立计数器,T1为无中断重装8位计数器
TMOD是一个8位的专用寄存器,其字节地址是89H,不能进行位寻址,系统复位后其所有位均为0。
TMOD用于控制T1和T0的操作模式及工作方,各位分布如下
最高位至最低位一次为GATE C/T M1 M0,第四位同高四位,高四位控制T1,第四位控制T0,GATE位通常为0,C/T为零为定时模式,为一为计数模式,M1,M0为00时工作在方式0,01工作方式1,10工作方式2。