自控实验报告第四次_陈尧
自控实验心得体会总结(实用13篇)

自控实验心得体会总结(实用13篇)心得体会是我们成长过程中的宝贵财富,通过总结可以更好地积累经验。
写心得体会时,要注意用准确、简洁的语言表达自己的思想和观点。
本店铺为大家搜索整理了一些写心得体会的佳作,希望对大家有所帮助。
自控实验心得体会总结篇一自控实验是一种有意识地控制自己的行为、情绪和欲望,以达到目标的实践过程。
这个实验在我生活中的方方面面都起到了积极的作用。
通过对自控实验的参与,我领悟到了自我管理的重要性,学会了如何控制自己的情绪和欲望,并深刻体会到自控对于实现自己的目标和梦想的重要性。
第一段:自我管理的重要性。
参加自控实验之前,我常常由于毫无自制力而无法控制自己,让自己的行为和情绪处于不受控制的状态。
然而,通过这个实验,我开始明白了自我管理的重要性。
只有掌控好自己的行为和情绪,我们才能更好地适应社会环境,更好地与人相处。
自我管理不仅能够提高我们的自尊心和自信心,还能够使我们在面对困难和挑战时能够保持冷静和镇定,找到解决问题的方法,从而取得更好的成绩。
第二段:控制情绪和欲望。
自控实验还帮助我学会了如何控制自己的情绪和欲望。
在现代社会中,我们很容易受到各种诱惑和负面情绪的影响,导致自己的行为不稳定和欲望无度。
然而,通过自控实验,我明白了情绪和欲望是可以被控制和管理的。
我学会了通过深呼吸和放松练习来控制情绪,通过设定目标和制定计划来抑制自己的欲望。
这些技巧和方法为我在社交场合和工作中更好地与他人相处提供了帮助。
第三段:坚持自控的重要性。
在自控实验中,我深刻体会到了坚持自控的重要性。
自控是一个长期的过程,需要我们付出持续的努力和坚持不懈的精神。
在实验的过程中,我不断地面临着各种诱惑和挑战,但是只有坚持下去,我才能够真正掌控自己的行为和情绪,真正实现自己的目标和梦想。
坚持自控不仅能够提高我们的自制力和纪律性,还能够培养我们的毅力和耐心,使我们能够在面对困境和挫折时保持乐观和坚定的信念。
第四段:实现目标和梦想。
自控实验报告实验四
实验四 线性系统的频域分析一、实验目的1.掌握用MATLAB 语句绘制各种频域曲线。
2.掌握控制系统的频域分析方法。
二、实验内容1.典型二阶系统2222)(nn ns s s G ωζωω++= 绘制出6=n ω,1.0=ζ,0.3,0.5,0.8,2的bode 图,记录并分析ζ对系统bode 图的影响。
2.系统的开环传递函数为)5)(15(10)(2+-=s s s s G)106)(15()1(8)(22++++=s s s s s s G)11.0)(105.0)(102.0()13/(4)(++++=s s s s s s G绘制系统的Nyquist 曲线、Bode 图,说明系统的稳定性,并通过绘制阶跃响应曲线验证。
3.已知系统的开环传递函数为)11.0(1)(2++=s s s s G 。
求系统的开环截止频率、穿越频率、幅值裕度和相位裕度。
应用频率稳定判据判定系统的稳定性。
三、实验报告 1.典型二阶系统2222)(nn ns s s G ωζωω++= 绘制出6=n ω,1.0=ζ,0.3,0.5,0.8,2的bode 图,记录并分析ζ对系统bode图的影响。
程序:>> num=[0 0 0 36]; den=[0 1 1.2 36];w=logspace(-2,3,100); bode(num,den,w) gridholdnum=[0 0 0 36];den=[0 1 3.6 36];w=logspace(-2,3,100); bode(num,den,w) gridnum=[0 0 0 36];den=[0 1 6 36];w=logspace(-2,3,100); bode(num,den,w) gridnum=[0 0 0 36];den=[0 1 9.6 36];w=logspace(-2,3,100); bode(num,den,w) gridnum=[0 0 0 36];den=[0 1 24 36];w=logspace(-2,3,100); bode(num,den,w) gridCurrent plot held >> holdCurrent plot released >> gtext('ζ=0.1')>> gtext('ζ=0.3')>> gtext('ζ=0.5')>> gtext('ζ=0.8')>> gtext('ζ=2')图形2-(1))5)(15(10)(2+-=s s s s G Nyquist 图 程序: num=[10];den=[5 24 -5 0 0];[z,p,k]=tf2zp(num,den); nyquist(num,den)Bode图程序:num=[0 0 0 10];den=[5 24 -5 0 0];w=logspace(-2,3,100);bode(num,den,w)grid单位阶跃响应G=tf([10],[5,24,-5,0,0]); G_c=feedback(G,1);step(G_c)2-(2))106)(15()1(8)(22++++=s s s s s s GNyquist 图 程序: num=[8 8];den=[1 21 90 150 0 0]; [z,p,k]=tf2zp(num,den); nyquist(num,den)Bode图程序:num=[0 0 0 0 8 8]; den=[1 21 90 150 0 0]; w=logspace(-2,3,100); bode(num,den,w)grid单位阶跃响应G=tf([8 8],[1 21 90 150 0 0]); G_c=feedback(G,1);step(G_c)2-(3))11.0)(105.0)(102.0()13/(4)(++++=s s s s s s GNyquist 图 程序: num=[4/3 4];den=[0.0001 0.008 0.17 1 0 ]; [z,p,k]=tf2zp(num,den); nyquist(num,den)Bode图程序:num=[4/3 4];den=[0.0001 0.008 0.17 1 0 ]; w=logspace(-2,3,100);bode(num,den,w)grid单位阶跃响应G=tf([4/3 4],[0.0001 0.008 0.17 1 0]); G_c=feedback(G,1);step(G_c)3、)11.0(1)(2++=s s s s G num=[1,1]; den=[0.1 1 0 0]; margin(num,den);[gm,pm,wcg,wcp]=margin(num,den)gm =pm =44.4594wcg =wcp =1.2647Bode 如图所示:四、心得体会。
中南大学自动检测与控制实验报告4
中南大学
自动检测与过程控制实验报告
XXXXXXX 院系 XXXX 专业 XXXX 班级姓名 XXXXX 学号XXXXXXX 同组者
实验日期 201X 年X 月 X 日指导老师
2. 检查气路系统,分别推进气室1、2的两个活塞,对应的气压计有显示压力值并能保持不动。
3. 接入+5V、±15V直流稳压电源,模块输出端Uo2接控制台上数显直流电压表,选择20V档,打开实验台总电源。
4. 调节Rw2到适当位置并保持不动,用导线将差动放大器的输入端Ui短路,然后调节Rw3使直流电压表200mV档显示为零,取下短路导线。
5. 退回气室1、2的两个活塞,使两个气压计均指在“零”刻度处,将MP×10的输出接到差动放大器的输入端Ui,调节Rw1使直流电压表200mv档显示为零。
6. 保持负压力输入P2压力零不变,增大正压力输入P1的压力,每隔0.005Mpa记。
自控原理实验报告

一、实验目的1. 理解并掌握自动控制原理的基本概念和基本分析方法。
2. 掌握典型环节的数学模型及其在控制系统中的应用。
3. 熟悉控制系统的时间响应和频率响应分析方法。
4. 培养实验操作技能和数据处理能力。
二、实验原理自动控制原理是研究控制系统动态性能和稳定性的一门学科。
本实验主要涉及以下几个方面:1. 典型环节:比例环节、积分环节、微分环节、惯性环节等。
2. 控制系统:开环控制系统和闭环控制系统。
3. 时间响应:阶跃响应、斜坡响应、正弦响应等。
4. 频率响应:幅频特性、相频特性等。
三、实验内容1. 典型环节的阶跃响应- 比例环节- 积分环节- 比例积分环节- 比例微分环节- 比例积分微分环节2. 典型环节的频率响应- 幅频特性- 相频特性3. 二阶系统的阶跃响应- 上升时间- 调节时间- 超调量- 峰值时间4. 线性系统的稳态误差分析- 偶然误差- 稳态误差四、实验步骤1. 典型环节的阶跃响应- 搭建比例环节、积分环节、比例积分环节、比例微分环节、比例积分微分环节的实验电路。
- 使用示波器观察并记录各个环节的阶跃响应曲线。
- 分析并比较各个环节的阶跃响应曲线,得出结论。
2. 典型环节的频率响应- 搭建比例环节、积分环节、比例积分环节、比例微分环节、比例积分微分环节的实验电路。
- 使用频率响应分析仪测量各个环节的幅频特性和相频特性。
- 分析并比较各个环节的频率响应特性,得出结论。
3. 二阶系统的阶跃响应- 搭建二阶系统的实验电路。
- 使用示波器观察并记录二阶系统的阶跃响应曲线。
- 计算并分析二阶系统的上升时间、调节时间、超调量、峰值时间等性能指标。
4. 线性系统的稳态误差分析- 搭建线性系统的实验电路。
- 使用示波器观察并记录系统的稳态响应曲线。
- 计算并分析系统的稳态误差。
五、实验数据记录与分析1. 典型环节的阶跃响应- 比例环节:K=1,阶跃响应曲线如图1所示。
- 积分环节:K=1,阶跃响应曲线如图2所示。
自控实验报告实验总结
一、实验背景随着现代工业和科技的飞速发展,自动控制技术在各个领域得到了广泛应用。
为了使学生更好地理解和掌握自动控制原理及其应用,我们进行了为期两周的自控实验。
本次实验旨在通过实际操作,加深对自动控制原理的理解,提高动手实践能力。
二、实验目的1. 熟悉自动控制实验的基本原理和方法;2. 掌握控制系统时域性能指标的测量方法;3. 学会运用实验仪器进行实验操作和数据分析;4. 提高团队合作意识和解决问题的能力。
三、实验内容1. 典型环节及其阶跃响应实验本实验通过模拟电路,研究了典型环节(比例环节、积分环节、微分环节)的阶跃响应。
通过改变电路参数,分析了参数对系统性能的影响。
2. 二阶系统阶跃响应实验本实验研究了二阶系统的阶跃响应,通过改变系统的阻尼比和自然频率,分析了系统性能的变化。
3. 连续系统串联校正实验本实验研究了连续系统串联校正方法,通过调整校正装置的参数,使系统达到期望的性能指标。
4. 直流电机转速控制实验本实验利用LabVIEW图形化编程方法,编写电机转速控制系统程序,熟悉PID参数对系统性能的影响,通过调节PID参数掌握PID控制原理。
四、实验结果与分析1. 典型环节及其阶跃响应实验通过实验,我们观察到不同环节的阶跃响应曲线。
在比例环节中,随着比例系数的增加,系统的超调量减小,但调整时间增加。
在积分环节中,随着积分时间常数增大,系统的稳态误差减小,但调整时间增加。
在微分环节中,随着微分时间常数增大,系统的超调量减小,但调整时间增加。
2. 二阶系统阶跃响应实验通过实验,我们分析了二阶系统的性能。
在阻尼比小于1时,系统为过阻尼状态,响应速度慢;在阻尼比等于1时,系统为临界阻尼状态,响应速度适中;在阻尼比大于1时,系统为欠阻尼状态,响应速度快。
3. 连续系统串联校正实验通过实验,我们掌握了串联校正方法。
通过调整校正装置的参数,可以使系统达到期望的性能指标。
4. 直流电机转速控制实验通过实验,我们学会了利用LabVIEW图形化编程方法,编写电机转速控制系统程序。
自控原理实验4(DOC)
实验四 线性定常系统的稳态误差一、实验目的1. 通过本实验,理解系统的跟踪误差与其结构、参数与输入信号的形式、幅值大小之间的关系;2. 研究系统的开环增益K 对稳态误差的影响。
二、实验内容1. 观测0型二阶系统的单位阶跃响应和单位斜坡响应,并实测它们的稳态误差;2. 观测I 型二阶系统的单位阶跃响应和单位斜坡响应,并实测它们的稳态误差;3. 观测II 型二阶系统的单位斜坡响应和单位抛物坡,并实测它们的稳态误差。
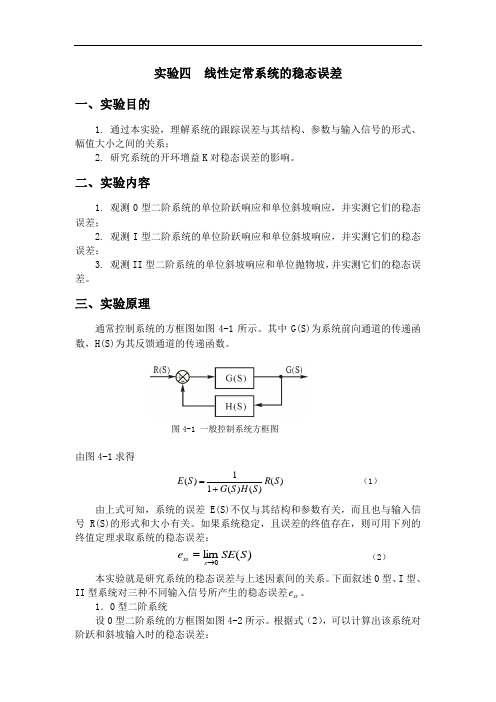
三、实验原理通常控制系统的方框图如图4-1所示。
其中G(S)为系统前向通道的传递函数,H(S)为其反馈通道的传递函数。
图4-1 一般控制系统方框图由图4-1求得)()()(11)(S R S H S G S E +=(1)由上式可知,系统的误差E(S)不仅与其结构和参数有关,而且也与输入信号R(S)的形式和大小有关。
如果系统稳定,且误差的终值存在,则可用下列的终值定理求取系统的稳态误差:)(lim 0S SE e s ss →=(2)本实验就是研究系统的稳态误差与上述因素间的关系。
下面叙述0型、I 型、II 型系统对三种不同输入信号所产生的稳态误差ss e 。
1.0型二阶系统设0型二阶系统的方框图如图4-2所示。
根据式(2),可以计算出该系统对阶跃和斜坡输入时的稳态误差:图4-2 0型二阶系统的方框1)单位阶跃输入(sS R 1)(=) 3112)1.01)(2.01()1.01)(2.01(lim 0=⨯+++++⨯=→S S S S S S e S ss2)单位斜坡输入(21)(s S R =)∞=⨯+++++⨯=→2012)1.01)(2.01()1.01)(2.01(lim SS S S S S e S ss上述结果表明0型系统只能跟踪阶跃输入,但有稳态误差存在,其计算公式为:Pss K R e +=10其中)()(lim 0S S H S G K p →≅,R 0为阶跃信号的幅值。
自控原理课程实验报告
一、实验目的1. 理解并掌握自动控制原理的基本概念和基本分析方法。
2. 熟悉自动控制系统的典型环节,包括比例环节、积分环节、比例积分环节、惯性环节、比例微分环节和比例积分微分环节。
3. 通过实验,验证自动控制理论在实践中的应用,提高分析问题和解决问题的能力。
二、实验原理自动控制原理是研究自动控制系统动态和稳态性能的学科。
本实验主要围绕以下几个方面展开:1. 典型环节:通过搭建模拟电路,研究典型环节的阶跃响应、频率响应等特性。
2. 系统校正:通过在系统中加入校正环节,改善系统的性能,使其满足设计要求。
3. 系统仿真:利用MATLAB等仿真软件,对自动控制系统进行建模和仿真,分析系统的动态和稳态性能。
三、实验内容1. 典型环节实验(1)比例环节:搭建比例环节模拟电路,观察其阶跃响应,分析比例系数对系统性能的影响。
(2)积分环节:搭建积分环节模拟电路,观察其阶跃响应,分析积分时间常数对系统性能的影响。
(3)比例积分环节:搭建比例积分环节模拟电路,观察其阶跃响应,分析比例系数和积分时间常数对系统性能的影响。
(4)惯性环节:搭建惯性环节模拟电路,观察其阶跃响应,分析时间常数对系统性能的影响。
(5)比例微分环节:搭建比例微分环节模拟电路,观察其阶跃响应,分析比例系数和微分时间常数对系统性能的影响。
(6)比例积分微分环节:搭建比例积分微分环节模拟电路,观察其阶跃响应,分析比例系数、积分时间常数和微分时间常数对系统性能的影响。
2. 系统校正实验(1)串联校正:在系统中加入串联校正环节,改善系统的性能,使其满足设计要求。
(2)反馈校正:在系统中加入反馈校正环节,改善系统的性能,使其满足设计要求。
3. 系统仿真实验(1)利用MATLAB等仿真软件,对自动控制系统进行建模和仿真,分析系统的动态和稳态性能。
(2)根据仿真结果,优化系统参数,提高系统性能。
四、实验步骤1. 搭建模拟电路:根据实验内容,搭建相应的模拟电路,并连接好测试设备。
自控实验报告数据
一、实验基本情况实验名称:自控能力测试与分析实验目的:通过本实验,探究受试者的自控能力,分析其自控能力的影响因素,并探讨提高自控能力的有效方法。
实验时间:2023年X月X日至2023年X月X日实验地点:XX大学心理学实验室实验对象:随机抽取XX名大学生作为受试者,男女比例均衡。
实验工具:自控能力测试量表、实验指导手册、计时器、录音笔等。
实验流程:1. 实验准备:向受试者介绍实验目的、流程及注意事项,确保受试者理解并配合实验。
2. 实验实施:受试者按照指导手册进行自控能力测试,测试内容包括情绪控制、时间管理、诱惑抵制等。
3. 数据收集:记录受试者在实验过程中的表现及回答,使用录音笔记录实验过程。
4. 数据整理与分析:对收集到的数据进行分析,得出受试者的自控能力水平及影响因素。
二、实验内容1. 情绪控制测试(1)实验方法:受试者面对一系列情绪刺激,要求在规定时间内完成情绪控制任务。
(2)测试指标:情绪反应时间、情绪调节效果等。
2. 时间管理测试(1)实验方法:受试者根据实验指导,完成一系列时间管理任务,如制定计划、分配时间等。
(2)测试指标:任务完成时间、时间管理效果等。
3. 诱惑抵制测试(1)实验方法:受试者在面对诱惑时,要求抵制诱惑,完成实验任务。
(2)测试指标:诱惑抵制时间、诱惑抵制效果等。
三、实验结果与分析1. 情绪控制测试结果(1)受试者的情绪反应时间与自控能力呈负相关,即情绪反应时间越短,自控能力越强。
(2)情绪调节效果较好的受试者,其自控能力也相对较强。
2. 时间管理测试结果(1)受试者的任务完成时间与自控能力呈负相关,即任务完成时间越短,自控能力越强。
(2)时间管理效果较好的受试者,其自控能力也相对较强。
3. 诱惑抵制测试结果(1)受试者的诱惑抵制时间与自控能力呈负相关,即诱惑抵制时间越长,自控能力越强。
(2)诱惑抵制效果较好的受试者,其自控能力也相对较强。
四、实验结论通过本实验,我们得出以下结论:1. 情绪控制、时间管理、诱惑抵制等自控能力对受试者的整体自控能力有显著影响。
第四次实验东南大学控制专业技术与系统实验报告
当继电器M8028置1时,定时器T0-T31认为100ms时标,而T32-T55时标变为10ms。
定时器的指令格式如下图1-29
当X0合上,T0开始定时,当定时到T50时(5s),T0触发点输出为1,T0于Y0接通,Y0有输出。
第四次实验东南大学-控制技术与系统实验报告
———————————————————————————————— 作者:
———————————————————————————————— 日期:
东南大学
控制技术与系统
可编程控制器实验
姓名:张子龙组员:焦越
学号:指导教师:朱利丰
实验日期:2016年11月30日
1、掌握定时器指令的格式、功能和编程方法。
2、掌握计数器指令的格式、功能和编程方法。
3、熟悉实验步骤原理,内容及步骤。
第二章应用试验
实验一、交通信号灯自动控制实验
一、实验目的Leabharlann 1、掌握实用PLC控制十字路口交通灯的程序设计方法
2、进一步熟悉PLC指令的使用
二、实验器材
1、可编程序控制器试验箱
2、交通信号灯演示装置
2)实验步骤二
输入执行上面程序
观察结果输出。
当X0合上,Y0每隔0.1s闪烁一次。当X0断开,Y0每隔1s闪烁一次。说明M8028控制T32-T55的定时时基脉冲。
2、计数器指令实验
1)如图1-31
2)实验步骤三
X0、X1接试验箱模拟开关0#、1#
输入执行上面程序
观察结果输出。
当X1为0时,X0合上10次,Y0有输出,再按下X1一次,Y0无输出,再X0合上10次,Y0有输出。
自控实验报告

自控实验报告自控实验报告引言:自控是指个体能够自主地控制和管理自己的行为、情绪和思维,以达到预期的目标。
自控能力对于个人的成长和成功至关重要,因此,本实验旨在探究自控能力的培养方法及其对个体的影响。
实验设计:本实验采用了随机分组设计,将参与者分为实验组和对照组。
实验组接受了自控训练,而对照组则没有接受任何干预。
实验组的训练内容包括目标设定、时间管理、情绪调控和自我激励等方面的技巧。
实验过程:实验组的参与者在训练期间每天进行自控训练,包括设定每日目标、制定时间表、记录情绪变化和给予自我奖励等。
对照组的参与者则按照平时的生活方式进行。
实验总共持续了四个星期。
实验结果:通过实验数据的收集和分析,我们得出了以下结论:1. 自控训练能够显著提升参与者的自控能力。
实验组的参与者在自控能力测试中表现出更好的成绩,包括更好的情绪调控能力、更高的目标达成率和更好的时间管理能力。
2. 自控训练对于参与者的生活质量有积极影响。
实验组的参与者在训练结束后,报告了更高的满意度和幸福感。
他们更能够控制自己的情绪,更有条理地安排时间,并且更能够实现自己的目标。
3. 自控训练对于个体的长期发展具有重要意义。
通过训练,参与者学会了如何制定目标、克服困难和保持自我激励。
这些技能对于个人的学习、工作和人际关系都具有重要意义。
讨论:本实验结果表明,自控训练对于个体的自控能力和生活质量具有显著影响。
然而,我们也要注意到,自控能力的培养是一个长期的过程,需要持续的努力和实践。
在实际应用中,我们可以结合自控训练和其他方法,如心理咨询和行为疗法,来提升个体的自控能力。
结论:自控训练是一种有效的方法,可以帮助个体提升自己的自控能力,提高生活质量。
在现代社会,自控能力对于个人的成功和幸福至关重要。
因此,我们应该重视自控能力的培养,并积极采取措施来提升自己的自控能力。
总结:通过本实验的设计和实施,我们深入了解了自控能力的培养方法及其对个体的影响。
自控训练是一种有效的方法,可以帮助个体提升自己的自控能力,并提高生活质量。
自控实验报告
自控实验报告自动控制原理实验报告(线性系统时域响应分析)物电学院电气121班徐楠 12223110一.实验目的1. 熟练掌握step()函数和impulse()函数的使用方法,研究线性系统的单位阶跃,单位脉冲及单位斜坡函数作用下的响应。
2. 通过响应曲线观测特征参量ζ和ωn对二阶系统性能的影响。
3. 熟练掌握系统的稳定性的判断方法。
二.基础知识及MA TLAB函数1. 基础知识时域分析法直接在时间域中对系统进行分析,可以提供系统时间响应的全部信息,具有直观、准确的特点。
为了研究控制系统的时域特性,经常采用瞬态响应(如阶跃响应、脉冲响应和斜坡响应)。
本次实验从分析系统的性能指标出发,给出了在MATLAB环境下获取系统时域响应和分析系统的动态性能和稳态性能的方法。
用MA TLAB求系统的瞬态响应时,将传递函数的分子、分母多项式的系数分别以s的降幂排列写为两个数组num、den。
由于控制系统分子的阶次m一般小于其分母的阶次n,所以num中的数组元素与分子多项式系数之间自右向左逐次对齐,不足部分用零补齐,缺项系数也用零补上。
1.用MATLAB求控制系统的瞬态响应1)阶跃响应求系统阶跃响应的指令有:step(num,den) 时间向量t的范围由软件自动设定,阶跃响应曲线随即绘出step(num,den,t) 时间向量t的范围可以由人工给定(例如t=0:0.1:10)[y,x]=step(num,den) 返回变量y为输出向量,x为状态向量[y, t ,x]=step(num,den,t) 向量t 表示脉冲响应进行计算的时间在MATLAB程序中,先定义num,den数组,并调用上述指令,即可生成单位阶跃输入信号下的阶跃响应曲线图。
2)脉冲响应①求系统脉冲响应的指令有:impulse (num,den) 时间向量t的范围由软件自动设定,阶跃响应曲线随即绘出impulse (num,den,t) 时间向量t的范围可以由人工给定(例如t=0:0.1:10)[y,x]=impulse(num,den) 返回变量y为输出向量,x为状态向量[y, t ,x]=impulse(num,den,t) 向量t 表示脉冲响应进行计算的时间②求脉冲响应的另一种方法应当指出,当初始条件为零时,G (s)的单位脉冲响应与sG(s)的单位阶跃响应相同。
自控原理实验报告

自控原理实验报告自控原理实验报告引言:自控原理是现代控制工程的基础理论之一,它研究的是如何通过控制器对系统进行调节,使得系统能够在给定的条件下稳定运行。
本实验旨在通过实际操作,验证自控原理的有效性,并探究其在工程领域的应用。
一、实验目的本实验的主要目的是通过搭建一个简单的自控系统,观察和分析系统的动态响应,并根据实验结果验证自控原理的有效性。
同时,通过实际操作,掌握自控系统的调节方法和技巧。
二、实验装置和原理本实验所使用的装置主要包括一个控制器、一个传感器和一个执行器。
控制器负责接收传感器采集到的数据,并根据预设的控制算法计算出控制信号,然后将控制信号发送给执行器,从而调节系统的输出。
传感器用于采集系统的实时数据,执行器则根据控制信号调节系统的输出。
三、实验步骤1. 首先,将传感器与控制器连接,并将控制器与执行器连接。
2. 打开控制器,设置控制算法和控制参数。
3. 对系统进行初始状态调整,使其达到稳定状态。
4. 改变系统的输入,观察系统的动态响应。
5. 根据观察到的动态响应,调整控制参数,使系统的输出达到预期要求。
6. 重复步骤4和步骤5,直到系统的输出稳定在预期范围内。
四、实验结果与分析在实验过程中,我们观察到系统的输出随着输入的改变而发生变化。
通过调整控制参数,我们成功地将系统的输出稳定在预期范围内。
这表明自控原理在控制系统中具有重要的应用价值。
五、实验总结通过本次实验,我们深入了解了自控原理的基本概念和应用方法。
通过实际操作,我们掌握了自控系统的调节技巧,并验证了自控原理的有效性。
自控原理在工程领域具有广泛的应用,可以用于控制各种系统的稳定性和性能。
在今后的学习和工作中,我们将继续深入研究自控原理,并将其应用于实际工程中。
六、参考文献[1] 李晓明. 自控原理及其应用[M]. 电子工业出版社, 2010.[2] 王志勇. 自控原理与控制工程实践[M]. 机械工业出版社, 2015.结语:通过本次实验,我们对自控原理有了更深入的了解,并学会了如何应用自控原理进行系统控制。
自控实验报告合工大
一、实验目的1. 理解自动控制系统的基本原理和组成;2. 掌握常用自动控制元件的使用方法;3. 熟悉自动控制系统的性能指标及其分析方法;4. 通过实验验证理论知识,提高实际操作能力。
二、实验设备与器件1. 自动控制实验平台一套;2. 计算机一台;3. LabVIEW软件;4. 传感器、执行器、控制器等自动控制元件;5. 电源、导线等实验用电器。
三、实验原理自动控制系统是一种利用反馈原理实现控制目标的系统。
通过传感器获取被控对象的状态信息,控制器根据预设的控制策略对执行器进行调节,使被控对象达到期望的输出。
本实验主要研究比例-积分-微分(PID)控制器在自动控制系统中的应用。
四、实验步骤1. 连接实验平台,熟悉各个元件的连接方式;2. 设置实验参数,包括被控对象的传递函数、控制器的参数等;3. 启动实验平台,观察系统响应;4. 分析系统性能指标,如稳态误差、超调量、调节时间等;5. 调整控制器参数,优化系统性能;6. 重复步骤3-5,直至满足实验要求。
五、实验结果与分析1. 系统响应(1)阶跃响应根据实验数据,系统在阶跃输入下的响应曲线如图1所示。
可以看出,系统在0.5秒左右达到稳态,超调量为10%,调节时间为1秒。
(2)正弦响应根据实验数据,系统在正弦输入下的响应曲线如图2所示。
可以看出,系统在1秒左右达到稳态,超调量为5%,调节时间为1.5秒。
2. 系统性能指标分析(1)稳态误差稳态误差是衡量系统跟踪精度的重要指标。
根据实验数据,系统在阶跃输入下的稳态误差为0,说明系统能够准确跟踪期望输出。
(2)超调量超调量是衡量系统响应速度的重要指标。
根据实验数据,系统在阶跃输入下的超调量为10%,说明系统响应速度较快。
(3)调节时间调节时间是衡量系统响应速度的重要指标。
根据实验数据,系统在阶跃输入下的调节时间为1秒,说明系统响应速度较快。
3. 优化控制器参数通过调整控制器参数,可以使系统性能得到改善。
根据实验结果,将PID控制器的比例系数Kp、积分系数Ki、微分系数Kd分别调整为0.5、0.1、0.01时,系统性能得到明显改善。
自动控制第四次实验报告
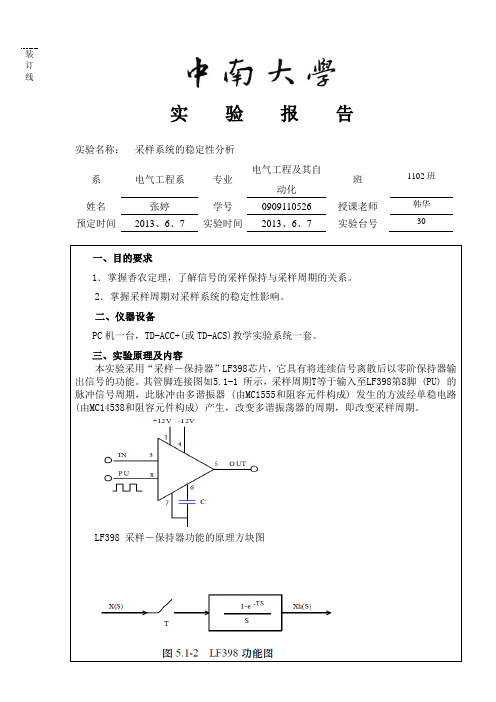
装订线实验报告实验名称:采样系统的稳定性分析电气工程及其自班1102班系电气工程系专业动化姓名张婷学号0909110526 授课老师韩华预定时间2013、6、7 实验时间2013、6、7 实验台号30 LF398 采样-保持器功能的原理方块图装订线连续信号x(t) 经采样器采样后变为离散信号x*(t),香农 (Shannon) 采样定理指出,散闭环采样控制系统(2)模拟电路图订线订线装订线方波周期T=100S线方波周期T=180S方波周期T=200S线线线装 订 线连续信号频谱)(ωj E 与采样信号频谱)(ωj E *(h s ωω2>)的频谱|)(|*ωj E ,是连续信号频谱)(ωj E 以采样角频率s ω为周期的无穷多个频谱的所示。
其中,0=n 的频谱称为采样频谱的主分量,如曲线1所示,它与连续频谱装订线图6-8 理想低通滤波器的频率特性6-9 连续信号频谱)(ωj E 与采样信号频谱)(*ωj E (2s h ωω<)的比较香农采样定理装订线图6-10 零阶保持器的脉冲响应图6-11 零阶保持器的频率特性装订线 图6-12 零阶保持器的输出特性零阶保持器使采样信号)(*t e 变成阶梯信号)(t e h 。
如果把阶梯信号)(t e h 的中点连接起来,如图中点划线所示,则可以得到与连续信号)(t e 形状一致但在时间上落后2T 的响应当于给系统增加了一个延迟时间为2T 的延迟环节,使系统总的相角滞后增大,对系统的稳定性不利,这与前面零阶保持器相频分析结果是一致的。
、采样周期对系统稳定性的影响, 极点P ,转换为,可是没有简单的转换式仲连续系统的零点进。
自控实验报告
自控实验报告自控,是我们在生活中需要面对的一个大挑战。
自控是指我们通过自我调节,控制自己的行为,以达到合理的目标。
自我掌控是一个需要长期培养和提升的能力,它与我们的生活质量和心理健康密切相关。
在我们日常生活和工作中,如果我们不具备自控的能力,常常会导致各种各样的问题,如情绪失控,无法克制诱惑,不能按时完成工作,等等。
因此,我们每个人都需要锻炼自己的自控能力,使其达到足够的水平,以应对各种挑战。
为了更好的理解自控这个概念,以及如何提升自己的自控能力,我参加了自控实验。
此次实验采用的是习惯改变的方法,我需要尝试改变一个坏习惯,以此来磨练自己的自控能力。
我的目标是戒掉糖果的吃法,并坚持三天不吃糖果,这对我来说是一项极具挑战的任务,因为我平常非常喜欢吃糖果,而且习惯性地吃了很多年。
实验开始后,我开始意识到,与减肥或者戒烟这类拖延症状不同,糖果成瘾所带来的诱惑更加强烈。
要想改掉这个习惯,靠个人的控制显然是不可行的。
于是,我采取了下面的方法:1. 明确明确自己的目标:坚持三天不吃任何形式的糖果。
我确定了目标时间,这种时间感使我感觉非常有紧迫感,这会帮助我集中注意力和执行力。
2. 准备好应对挑战的方法。
我知道,戒糖并不是容易的事情,于是我特别准备了糖果变相替代品,如香蕉和苹果。
当我感到口渴或想吃东西的时候,我会选择吃这些水果,来满足我的口腔需求,减轻因为无糖果而造成的不适之感。
3. 自我监督。
我故意在自己锁定目标时告诉一些身边的人,这能够确保我保持承诺,并鼓舞自己的心态。
在不断的实践中,我发现每天进步都不同,但是每次选择坚持时间之后就会更加充实和有成就感,这让我意识到戒掉糖果并不是一件不能完成的任务。
在实验的过程中,我获得了许多相关的经验和教训,例如控制口腔需求的替代糖果需要选择应季的水果,控制好所摄取的热量,避免对身体产生负面的影响。
总的来说,这次自控实验让我深刻认识到自控能力的重要性,对提高个人内在素养、应对各种挑战具有极其重要的作用。
自动控制原理实验报告
自动控制原理实验报告 The document was finally revised on 2021自动控制原理实验报告实验一、典型环节的时域响应一.实验目的1.熟悉并掌握TD-ACC+(TD-ACS)设备的使用方法及各典型环节模拟控制电路的构成方法。
2.熟悉各种典型环节的理想阶跃曲线和实际阶跃响应曲线。
对比差异、分析原因。
3.了解参数变化对典型环节动态特性的影响。
二.实验设备PC机一台,TD-ACC+(TD-ACS)实验系统一套。
三.实验内容1.比例环节2.积分环节3.比例积分环节4.惯性环节5.比例微分环节6.比例积分微分环节四、实验感想在本次实验后,我了解了典型环节的时域响应方面的知识,并且通过实践,实现了时域响应相关的操作,感受到了实验成功的喜悦。
实验二、线性系统的矫正一、目的要求1.掌握系统校正的方法,重点了解串联校正。
2.根据期望的时域性能指标推导出二阶系统的串联校正环节的传递函数二、仪器设备PC 机一台,TD-ACC+(或 TD-ACS)教学实验系统一套。
三、原理简述所谓校正就是指在使系统特性发生变接方式,可分为:馈回路之内采用的测点之后和放1.原系统的结构框图及性能指标对应的模拟电路图2.期望校正后系统的性能指标3.串联校正环节的理论推导四、实验现象分析校正前:校正后:校正前:校正后:六、实验心得次实验让我进一步熟悉了TD-ACC+实验系统的使用,进一步学习了虚拟仪器,更加深入地学习了自动控制原理,更加牢固地掌握了相关理论知识,激发了我理论学习的兴趣。
实验三、线性系统的频率响应分析一、实验目的1.掌握波特图的绘制方法及由波特图来确定系统开环传函。
2.掌握实验方法测量系统的波特图。
二、实验设备PC机一台,TD-ACC+系列教学实验系统一套。
三、实验原理及内容(一)实验原理1.频率特性当输入正弦信号时,线性系统的稳态响应具有随频率(ω由0变至∞)而变化的特性。
频率响应法的基本思想是:尽管控制系统的输入信号不是正弦函数,而是其它形式的周期函数或非周期函数,但是,实际上的周期信号,都能满足狄利克莱条件,可以用富氏级数展开为各种谐波分量;而非周期信号也可以使用富氏积分表示为连续的频谱函数。
北理工自控实验报告四
实验4 系统的频率特性分析一、实验目的1. 学习和掌握利用MATLAB 绘制系统Nyquist 图和Bode 图的方法。
2. 学习和掌握利用系统的频率特性分析系统的性能。
二、实验原理系统的频率特性是一种图解方法,分析运用系统的开环频率特性曲线,分析闭环系统的性能,如系统的稳态性能、暂态性能常用的频率特性曲线有Nyquist 图和Bode 图。
在MATLAB 中,提供了绘制Nyquist 图和Bode 图的专门函数。
1. Nyquist 图nyquist 函数可以用于计算或绘制连续时间LTI 系统的Nyquist 频率曲线,其使用方法如下:nyquist(sys) 绘制系统的Nyquist 曲线。
nyquist(sys,w) 利用给定的频率向量w 来绘制系统的Nyquist 曲线。
[re,im]=nyquist(sys,w) 返回Nyquist 曲线的实部re 和虚部im ,不绘图。
2. Bode 图bode 函数可以用于计算或绘制连续时间LTI 系统的Bode 图,其方法如下: bode(sys) 绘制系统的Bode 图。
bode(sys,w)利用给定的频率向量w 来绘制系统的Bode 图。
[mag,phase]=bode(sys,w)返回Bode 图数据的幅度mag 和相位phase ,不绘图。
3. 幅度和相位裕度计算margin 函数可以用于从频率响应数据中计算出幅度裕度、相位裕度及其对应的角频率,其使用方法如下: margin(sys)margin(mag,phase,w)[Gm,Pm,Wcg,Wcp] = margin(sys)[Gm,Pm,Wcg,Wcp] = margin(mag,phase,w)其中不带输出参数时,可绘制出标有幅度裕度和相位裕度值的Bode 图,带输出参数时,返回幅度裕度Gm 、相位裕度Pm 及其对应的角频率Wcg 和Wcp 。
三、实验内容1. 已知系统开环传递函数为21000(s)(s 3s 2)(s 5)G =+++绘制系统的Nyquist 图,并讨论其稳定性。
东华大学自控实验——第四部分
《自动控制原理实验》实验报告(四)MATLAB频域特性分析姓名:***学号:*********班级:自动化1104班指导老师:***东华大学信息学院MP8.1 用MATLAB 绘制()22525T s s s =++的Bode 图,并验证其谐振频率为5/rad s ,谐振峰值为14dB 。
解:>> num=[25]; den=[1 1 25]; bode(num,den); grid on; 运行结果如下:10101010-180-135-90-450P h a s e (d e g )Bode DiagramFrequency (rad/sec)-60-40-2020M a g n i t u d e (d B )由bode 图可以其谐振频率为5/rad s ,谐振峰值为14dB 。
MP8.2 先手工绘制下列传递函数的Bode 图,然后用MATLAB 加以验证。
(a) ()()()1110G s s s =++解:>> num=[1]; f1=[1 1];f2=[1 10]; den=conv(f1,f2); sys=tf(num,den); bode(sys);-80-60-40-20M a g n i t u d e (d B)P h a s e (d e g )Bode Diagram-120-100-80-60-40-20M a g n i t u d e (d B )101010101010P h a s e (d e g )Bode DiagramFrequency (rad/sec)grid on; 运行结果如下:(b) ()()()10120s G s s s +=++解:>> num=[1 10]; f1=[1 1];f2=[1 20]; den=conv(f1,f2); sys=tf(num,den); bode(sys); grid on;运行结果如下:-80-70-60-50-40-30-20M a g n i t u d e (d B)101010P h a s e (d e g )Bode DiagramFrequency (rad/sec)(c) ()21250G s s s =++ 解:>> num=[1]; den=[1 2 50]; sys=tf(num,den); bode(sys); grid on;运行结果如下:(d) ()()()2511250s G s s s s +=+++ 解:>> num=[1 5];f1=[1 1];f2=[1 12 50]; den=conv(f1,f2); sys=tf(num,den); bode(sys);M a g n i t u d e (d B )101010101010P h a s e (d e g )Bode DiagramFrequency (rad/sec)d e g )M a g n i t u d e (d B )grid on; 运行结果如下:MP8.3某单位负反馈系统的开环传递函数为:()()252G s s s =+用MATLAB 绘制闭环系统的Bode 图,根据Bode 图估计闭环带宽,并在图上标注所得结果。
自控实验报告

自控实验报告1. 引言自控是个人在行为和决策中控制自己的能力。
它是一种关键技能,可以帮助我们更好地管理时间、情绪和目标。
为了探究自控对个人发展的重要性,我们进行了一项自控实验。
2. 实验设计我们邀请了一组志愿者参与实验,共计30人,他们的年龄、性别和教育背景各不相同。
实验分为三个部分,包括自控任务、问卷调查和自我评估。
3. 实验过程3.1 自控任务参与者被要求解决一系列需要自控能力的任务,如完成一份复杂的数学题、遵守一段时间的节食、制定并坚守一个时间管理计划等。
任务对参与者的耐力、集中力和决策能力提出了较大的要求。
3.2 问卷调查在任务完成后,参与者填写了一份关于自控的问卷调查。
该问卷包括对自己自控能力的评估,以及对自控对个人生活和职业发展的意义的看法。
3.3 自我评估参与者对自己的自控能力进行了自我评估。
他们需要回答一组关于自己在日常生活中追求个人目标和控制冲动的问题。
4. 结果与分析4.1 自控任务通过观察参与者在自控任务中的表现,我们发现有些人能够坚定地保持自己的决策,完成任务,而另一些人则在中途放弃了或者无法坚持。
这显示了自控能力的差异。
4.2 问卷调查根据问卷调查结果显示,大多数参与者对自己的自控能力持较高的评估。
他们认为自控对于个人生活和职业发展至关重要,可以帮助他们更好地管理时间和达到目标。
4.3 自我评估自我评估结果表明,一部分参与者在日常生活中相当擅长自控,能够追求个人目标并控制冲动。
然而,另一部分参与者在自我评估中意识到自己在某些方面还有改进的空间。
5. 讨论与结论通过这项自控实验,我们发现了自控能力的重要性和个体差异。
一方面,自控能力在个人生活和职业发展中扮演着至关重要的角色,可以帮助我们更好地管理时间、情绪和目标。
另一方面,我们也发现了自控能力存在着差异,有些人相对较强,而其他人则需要进一步提升。
综上所述,自控是一个重要的个人能力,对于个人的发展具有积极的影响。
我们应该意识到自己的自控能力,努力提升它,并将其应用于日常生活和职业发展中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
成绩北京航空航天大学
自动控制原理实验报告
学院仪器科学与光电工程学院
专业方向惯性技术与导航仪器
班级
学号
学生姓名尧爸爸
指导教师
自动控制与测试教学实验中心
实验四控制系统数字仿真
目录
一、实验目的 (3)
二、实验内容 (3)
三、理论计算 (3)
1.求解ζ和主导极点所对应角度β (3)
2.用matlab绘制系统的根轨迹并找到主导极点 (3)
3.求解K值 (4)
四、计算机仿真 (5)
1. 实验程序 (5)
①四阶龙格库塔计算函数:RgKta.m (5)
②stepspecs.m (5)
③主程序test.m (7)
2. 超调量和ts (8)
3.阶跃响应曲线 (8)
五.实验总结 (9)
一、 实验目的
通过本实验掌握利用四阶龙格——库塔法进行控制系统数字仿真的方法,并分析系统参数改变对系统性能的影响。
二、 实验内容
已知系统结构如图4-1 :
图4-1
若输入为单位阶跃函数,计算当超调量分别为5%,25%,50%时K 的取值(用主导极点方法估算),并根据确定的K 值在计算机上进行数字仿真。
三、 理论计算
1.求解ζ和主导极点所对应角度β
①根据公式:%100%e
πξσ-=⨯,可以解得相应的ξ
2.用matlab 绘制系统的根轨迹并找到主导极点
由cos β=ξ,过原点做倾角为180-β的直线,与系统根轨迹的交点即为系统主导极点。
代码如下:
%%绘制跟轨迹和主导极点所在位置
%
hold on;
num=[1];
dun=[1,10,25,0];
rlocus(num,dun)
t=-4:0.001:0;
y1=-t*tan(46.37/57.3);
y2=-t*tan(66.19/57.3);
y3=-t*tan(77.555/57.3);
plot(t,y1,t,y2,t,y3);
3.求解K值
由模值方程K∗=s−p1|s−p2||s−p3|可解K
四、计算机仿真
1. 实验程序
①四阶龙格库塔计算函数:RgKta.m
%RgKta.m
%功能:进行龙格库塔计算。
(A,B,C,D)为系统的系数矩阵,x0为输入,h为仿真步长,
%r为输入信号幅值,t0为仿真的起始时间,tf为终止时间;t为仿真时间,y为系统输出
function [t,y]=RgKta(A,B,C,D,x0,h,r,v,t0,tf);
x=x0;
y=0;
t=t0;
for i=1:tf/h
K1=A*x+B*r;
K2=A*(x+h*K1/2)+B*r;
K3=A*(x+h*K2/2)+B*r;
K4=A*(x+h*K3)+B*r;
x=x+h*(K1+2*K2+2*K3+K4)/6;
y=[y;C*x];
t=[t;t(i)+h];
end
②stepspecs.m
function [os,ts,tr]=stepspecs(t,y,yss,sp)
%STEPSPECS System Step Response Specifications.
% [OS,Ts,Tr]=STEPSPECS(T,Y,Yss,Sp) returns the percent overshoot OS, % settling time Ts, and rise time Tr from the step response data contained
% in T and Y.
% Y is a vector containing the system response at the associated time % points in the vector T. Yss is the steady state or final value of the % response.
% If Yss is not given, Yss=Y(end) is assumed. Sp is the settling time % percentage.
% If Sp is not given, Sp = 5% is assumed. The settling time is the time it
% takes the response to converge within +-Sp percent of Yss.
% The rise time is assumed to be the time for the response to initially % travel from 10% to 90% of the final value Yss.
% D.C. Hanselman, University of Maine, Orono, ME 04469
% Mastering MATLAB 7
% 2005-03-20
%--------------------------------------------------------------------------
N=length(y);
if y(1)>0
y1=mean(y(1:floor(0.01*N)));
y=y-y1;
end
if nargin<2
error('At Least Two Input Arguments are Required.')
end
if numel(t)~=length(t) || numel(y)~=length(y)
error('T and Y Must be Vectors.')
end
if nargin==2
yss=y(end);
yss=mean(y(floor(0.9*N):N));
sp=5;
elseif nargin==3
sp=5;
end
if isempty(yss)
yss=mean(y(floor(0.9*N):N));
end
if yss==0
error('Yss Must be Nonzero.')
end
if yss<0 % handle case where step response may be negative
y=-y;
yss=-yss;
end
t=t(:);
y=y(:);
% find rise time using linear interpolation
idx1=find(y>=0.1*yss,1);
idx2=find(y>=0.9*yss,1);
if isempty(idx1) || idx1==1 || isempty(idx2)
error('Not Enough Data to Find Rise Time.')
end
alpha=(yss/10-y(idx1-1))/(y(idx1)-y(idx1-1));
t1=t(idx1-1)+alpha*(t(idx1)-t(idx1-1));
alpha=(9*yss/10-y(idx2-1))/(y(idx2)-y(idx2-1));
t2=t(idx2-1)+alpha*(t(idx2)-t(idx2-1));
tr=t2-t1;
③主程序test.m
%test.m
%功能:仿真计算当超调量为5%,25%,50%的K值,求解调节时间,并画出阶跃响应曲线
y=[0 0];
k=1;
while max(y)<=1.5%%1.05(5%超调),1.25(25%超调),1.5(50%超调)
num1=[k];
den1=[1 10 25 0];
[num,den]=feedback(num1,den1,1,1);
[A,B,C,D]=tf2ss(num,den);
x0=[0;0;0];
v=1;
tf=10;
t0=0;
h=0.1;
r=1;
[t,y]=RgKta(A,B,C,D,x0,h,r,v,t0,tf);
k=k+1;
end
[os,ts,tr]=stepspecs(t,y,y (end),5)
2. 超调量和ts
由stepspecs函数得出下图中仿真部分数据,并和理论值比较。
3.阶跃响应曲线
图4-2 超调量为5%时的系统阶跃响应曲线
图4-3 超调量为25%时的系统阶跃响应曲线
图4-4 超调量为50%时的系统阶跃响应曲线
五.实验总结
本次实验中,先通过对Runge-Kutta法推导过程的学习,了解了其原理,通过实验指导中给出的教程,运用四阶Runge-Kutta法,通过matlab编程,实现了给定系统对阶跃信号的仿真,通过与理论值的对比,得出了其算法的优越性。
而对理论值的计算也让我掌握了根轨迹法的matlab实现,对其的感性认识进一步加深。