多波束天线通道幅相一致性校正及实现(精)
多波束天线通道幅相一致性校正及实现
多波束天线通道幅相一致性校正及实现
朱丽;龚文斌;杨根庆
【期刊名称】《微计算机信息》
【年(卷),期】2007(023)020
【摘要】本文针对多波束天线接收机的通道幅相一致性校正,提出了一种基于自适应算法的校正方法并在FPGA中实现了该方法.在满足系统要求的前提下,该方法不但实现起来相对容易,而且算法的精度和动态范围也有一定的保证.仿真和试验结果表明,该方法是可行的.
【总页数】3页(P158-160)
【作者】朱丽;龚文斌;杨根庆
【作者单位】200050,上海,中科院上海微系统与信息技术研究所;200050,上海,中科院上海微系统与信息技术研究所;200050,上海,中科院上海微系统与信息技术研究所
【正文语种】中文
【中图分类】TN828.5
【相关文献】
1.宽带数字接收机I/Q幅相不一致性的校正 [J], 卢刚;吕幼新
2.多信道接收机幅相不一致性的数字化校正 [J], 吴瑛;王斌;张莉;杨宾
3.基于相控阵天基测控通信的新颖通道幅相校正算法 [J], 赵奕;杨艳秋;王宗
4.单脉冲雷达接收通道的幅相一致性及幅相调整电路 [J], 张远见;方汉平;倪新蕾
5.对舰载地波雷达通道幅相不一致性的补偿 [J], 张忠;袁业术;孟宪德
因版权原因,仅展示原文概要,查看原文内容请购买。
多波束的校准方法及其成果分析探讨
多波束的校准方法及其成果分析探讨发布时间:2023-02-20T06:00:53.564Z 来源:《建筑实践》2022年10月19期作者:李烁[导读] 随着卫星技术的不断发展,遥感图像的获取越来越普遍李烁天津市陆海测绘有限公司摘要:随着卫星技术的不断发展,遥感图像的获取越来越普遍,尤其是在低轨卫星对地观测领域。
遥感图像的分辨率要求越来越高,对遥感图像的处理也提出了更高的要求。
多波束由于能够同时对同一区域不同波段进行成像,在很多场合下可以发挥重要作用。
因此,为了提高多波束的观测质量,需要定期对多波束数据进行校正。
为了保证校正结果能够符合实际情况和预期要求,必须建立合理的校正方法。
本文将对多波束的校准方法及校准成果进行探讨。
关键词:多波束;校准方法;成果分析前言为了提高多波束测量精度和效率,在实际应用中需要对其进行合理优化设计。
首先,要选择合适的测区模型,并且还要保证所选用的测区模型具有较高的准确性;然后,要根据不同的测区特点来确定相应的数据处理方式,这样才能够使得数据采集工作更加高效地开展起来。
该方式具有较高的准确性和可靠性,并且还具备了一定的灵活性,因此在实际应用中能够得到广泛应用。
但是由于其自身存在着一些不足之处,所以需要相关人员不断改进与完善。
1 多波束校正参数概述1.1横摇偏差纵摇偏差艏向偏差简介它有别于常规的单波束点和线状测量,它是一种平面测量。
多波束式传感器由于其自身的主观因素,无法实现全水平定位,造成其与实际水平面存在倾斜度,我们习惯把换能器与船只水平面纵向的夹角称为纵摇偏差(pitch),换能器与船只水平面垂直方向的夹角为横摇偏差(roll)。
在实际测量中,由于船只的运动会导致换能器与水平面也产生一个夹角,所以对应某一时刻t,换能器的横摇角roll(t)、纵摇角pitch(t)都由两部分组成:roll(t)=roll(静)+roll(动)pitch(t)=pitch(静)+pitch(动)即roll(t)、pitch(t)都包含一个动态分量和一个静态分量。
一种多波束测向方法研究与实现
一种多波束测向方法研究与实现作者:袁红伟来源:《中国科技博览》2016年第26期摘要:雷达方位角是雷达信号的主要参数,精确、实时地测出雷达方位角,对分选识别雷达信号和对雷达的实时干扰十分有效。
本文主要介绍了一种多波束比幅测向方法,论述了多波束测向系统的工作原理以及相应的实现方式,通过对多波束测向天线进行波束整形处理和幅度一致性校正,提高了测向精度。
关键词:多波束测;向雷达;波束整形【分类号】:TP391.721 引言现代电子战中,面临密集、复杂和捷变的电子信号环境,雷达侦察系统必须全频段、全方位、实时准确、高分辨率地测量雷达信号的各项参数[1]。
随着相控阵雷达的广泛使用,迫切需要研制高截获能力、高灵敏度、功能强大的适应现代电子战环境的新体制雷达侦察接收机,多波束测向技术便是比较好的选择。
2 多波束测向原理多波束测向是通过比幅实现测向。
多波束比幅测向技术是通过对覆盖所需侦察空域的2个或者3个喇叭天线所接收到的信号幅度进行比较来确定信号到达角度的,三喇叭比幅测向系统要求每个喇叭天线和其接收通路都有着严格一致的幅度特性,天线波束指向示意图如图1所示[2]。
两波束比幅测向算法通常是,当确定第M个波束信号为最大时,在(M-1)号和(M+1)号波束中找出次最大波束号,如(M-1)号为次最大,则取式(2)计算;如(M+1)号波束为次最大,则取式(3)计算,从而确定辐射源的方位角。
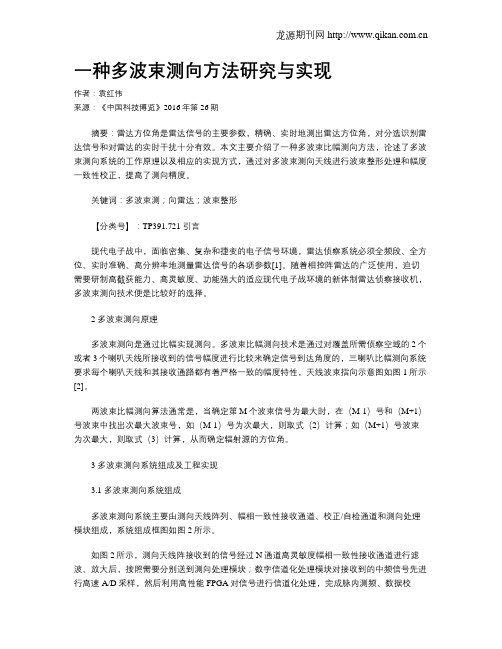
3 多波束测向系统组成及工程实现3.1 多波束测向系统组成多波束测向系统主要由测向天线阵列、幅相一致性接收通道、校正/自检通道和测向处理模块组成,系统组成框图如图2所示。
如图2所示,测向天线阵接收到的信号经过N通道高灵敏度幅相一致性接收通道进行滤波、放大后,按照需要分别送到测向处理模块;数字信道化处理模块对接收到的中频信号先进行高速A/D采样,然后利用高性能FPGA对信号进行信道化处理,完成脉内测频、数据校正、比幅测向、信号类型识别、数据存储与回放,并将信号分选结果送给终端计算机;校正/自检通道通过N功分器将自检信号分为N路送给N个接收通道,用以检测各接收通道是否工作正常。
多波束天线通道幅相一致性校正及实现(精)

多波束天线通道幅相一致性校正及实现朱丽龚文斌杨根庆(中科院上海微系统与信息技术研究所,上海 200050)摘要:本文针对多波束天线接收机的通道幅相一致性校正,提出了一种基于自适应算法的校正方法并在FPGA 中实现了该方法。
在满足系统要求的前提下,该方法不但实现起来相对容易,而且算法的精度和动态范围也有一定的保证。
仿真和试验结果表明,该方法是可行的。
关键词:多波束天线,通道失衡,幅相误差,最小均方误差,校正1.引言随着人们对卫星通信要求的不断提高,卫星通信技术得到了很大的发展。
其中,卫星多波束天线目前己成为提高卫星通信性能、降低系统成本的一项关键性技术。
多通道接收机是DBF 天线系统中信号的必经之路,正是这种多接收通道的结构,使DBF 天线系统增加了幅度和相位误差的潜在来源。
与多个天线阵列相连接的多个接收机通道必须要有很高的一致性,否则通道间的失配将严重影响数字波束系统的性能。
对多通道间误差的校正正是星载数字多波束天线的关键技术之一。
由于目前国内对星载DBF 天线的研究还处于初级阶段,所以需要更多的借鉴智能天线、自适应天线和雷达等领域已有的研究成果。
本文主要针对基于卫星应用的两维阵列DBF 天线系统,采用目前最常用的LMS 算法设计并在FPGA 中实现了对其前端射频多通道接收机的幅相校正系统,最后给出了测试结果。
测试结果表明,这种采用定点数制的LMS 算法对系统的幅相误差具有较好的校正性能。
2.数字多波束天线的幅相校正原理数字多波束天线的组成如图1所示。
前端天线阵是由多个天线单元组成两维阵列,阵元接收的信号经射频前端电路、A/ D 转换电路、数字下变频器后送入数字波束形成器处理。
[2][1]设计一个六边形排列的7单元天线阵,A/D后端的数字下变频器和波束形成器均采用FPGA 实现。
天线阵接收到的信号首先通过射频通道混频后得到中频信号,再将此模拟中频信号经过ADC 后得到数字中频信号,然后送入DDC 进行下变频;下变频后,每路信号分为正交的I、Q 两路,这些正交的信号再送入波束成形器中进行波束成形,最后的输出即为合成的波束。
驻波比告警和幅相一致性告警处理方案
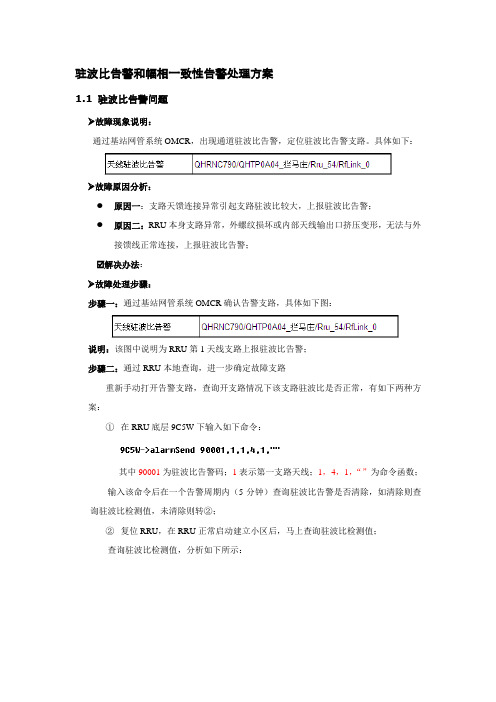
驻波比告警和幅相一致性告警处理方案1.1 驻波比告警问题故障现象说明:通过基站网管系统OMCR,出现通道驻波比告警,定位驻波比告警支路。
具体如下:故障原因分析:●原因一:支路天馈连接异常引起支路驻波比较大,上报驻波比告警;●原因二:RRU本身支路异常,外螺纹损坏或内部天线输出口挤压变形,无法与外接馈线正常连接,上报驻波比告警;☑解决办法:故障处理步骤:步骤一:通过基站网管系统OMCR确认告警支路,具体如下图:说明:该图中说明为RRU第1天线支路上报驻波比告警;步骤二:通过RRU本地查询,进一步确定故障支路重新手动打开告警支路,查询开支路情况下该支路驻波比是否正常,有如下两种方案:①在RRU底层9C5W下输入如下命令:其中90001为驻波比告警码;1表示第一支路天线;1,4,1,“”为命令函数;输入该命令后在一个告警周期内(5分钟)查询驻波比告警是否清除,如清除则查询驻波比检测值,未清除则转②;②复位RRU,在RRU正常启动建立小区后,马上查询驻波比检测值;查询驻波比检测值,分析如下所示:该8支路驻波比显示值小于25,最大值21也不是很接近25,为正常状态,如出现大于25或者23以上情况,则该支路驻波比异常,继续步骤三;如下图所示为异常支路:注:驻波比告警门限由bbu设定,下行功率小于25dbm时不会触发驻波比告警步骤三:工程更换馈线头,判定RRU故障或天馈故障更换告警支路与相邻正常支路馈线头,重复步骤二;1)若告警随着馈线转移,即为天馈系统问题,通过倒换天线端相应端口支路馈线头判定馈线问题或者天线问题,并更换相应设备;2)若告警不随着馈线转移,即RRU支路问题,更换RRU;1.2 幅相一致性告警问题故障现象说明:通过基站网管系统OMCR,查询出现幅相一致性告警,告警类型有接收通道天线通道幅相一致性告警和发射通道天线通道幅相一致性告警两种类型,具体如下:故障原因分析:●原因一:馈线支路异常,导致支路AC环回校准异常,产生幅相一致性告警;●原因二:RRU支路异常,产生幅相一致性告警;☑解决办法:故障处理步骤:步骤一:通过基站网管系统OMCR确定告警支路,如下图:OMCR中显示活动告警栏:说明:该图中显示为RRU第2天线支路出现接收发射通道幅相一致性告警步骤二:通过机房远端RRU底层查询,初步分析故障支路通过RRU底层命令进行信息查询,查取各支路AC校准值,确定故障支路。
基于LMS算法的波束形成天线通道幅相校正
现代导航
・ 6 7・
基于 L MS算法 的波束形 成天线通道幅相校正
金 燕
( 中国电子科技集 团公司第二 十研 究所 ,西安 7 1 0 0 6 8 )
摘
要:本文针对波束形成天线通道幅相校 正问题 ,提 出了一种基于 L MS算法的校正方法
并利用 m a t l a b 进行仿真验证。 从仿真结果看 出当自 适应滤波器的权 系数收敛后 , 该方法具有较好
波 束 形成 天线 阵 列通道 包 含高频 放 大器 、混频
器 、中频放大器等模拟器件 以及 A / D 数模转换器 件 。由于以上器件其构成 电路不可避免的存在特性
上 的差异 、加 工误 差 ,同时 受到 电路板 布 线 时走线 不 等 长等 因素 的影 响 ,使 得每 个 阵元 的通 道增 益和 相 移 都会 较之 于理 想情 况 时 出现 随机偏 差 ,即通道
正。
・ 6 8・
现代导航
2 0 1 3钲
图 1通道 的校正原理
本 项 目采用 自适 应滤 波器 采用 L MS算法 , L MS 算 法是 以均 方误 差最 小 为判定 准则 。以抽头 数 为 Ⅳ 的L MS 自适应 滤 波器 为例 ,其 原理 框 图如 图 2所
示。
_ y ( ) = Zy ( )
J I N _ c m
Abs t r a c t : Th i s p a p e r d i s c u s s e s t h e c o r r e c t i o n o f b e a mf o r mi n g a n t e n n a ’ S a mp l i t u d e nd a p h a s e nd a p r e s e n t s a me t h o d b a s e d o n
数字波束形成系统多通道幅相校正方法及应用
数字波束形成系统多通道幅相校正方法及应用数字波束形成(Digital Beamforming,DBF)是检测、传输、接收和处理电波信号的一种高效、可靠的先进技术,它能够改善微波无线通信系统的性能。
数字波束形成技术可以有效地传输多通道幅相关信号,使用该技术可以提高微波无线通信系统的性能。
本文首先介绍了数字波束形成的原理和应用,然后介绍了多通道幅相校正(Multi-ChannelPhase Calibration,MPC)的原理,以及它在数字波束形成系统中的应用。
数字波束形成技术包括波束形成本身和传输信号处理环节。
波束形成本身涉及到微波发射天线的数字信号处理,要求收发信号之间的相位和幅度的一致性。
传输信号处理主要是涉及到把每个通道的幅度和相位进行匹配。
数字波束形成技术可以用来消除信号拥塞、提高信号强度与抗扰性、优化波束形成等效果。
多通道幅相校正(MPC)是用于微波无线通信系统中波束形成精度校正的一种方法,它对宽带信号进行幅相校正,目的是有效地提高波束形成系统的性能。
MPC技术主要利用相位反馈来实现对每个信号通道的幅度和相位校准,以确保探测到相同水平下的信号强度、抗扰性和波束形成效率。
MPC技术在数字波束形成系统中的应用可大大提高系统的性能,这些应用包括信号的增强,信号的质量改善,副本抑制,距离估计,目标检测和定位,以及恢复信号的能力。
在微波无线通信系统中,MPC技术可以帮助系统达到最优性能,使系统电平提高,增加可靠性,准确度和灵活性。
因此,多通道幅相校正技术在数字波束形成系统中已成为了一种重要的应用。
它能够有效地调整微波无线通信系统的波束形成精度,可以大大提高系统的性能,从而获得更好的波束形成效果。
多波束天线通道幅相一致性校正及实现

多波束天线通道幅相一致性校正及实现朱丽龚文斌杨根庆(中科院上海微系统与信息技术研究所,上海 200050)摘要:本文针对多波束天线接收机的通道幅相一致性校正,提出了一种基于自适应算法的校正方法并在FPGA 中实现了该方法。
在满足系统要求的前提下,该方法不但实现起来相对容易,而且算法的精度和动态范围也有一定的保证。
仿真和试验结果表明,该方法是可行的。
关键词:多波束天线,通道失衡,幅相误差,最小均方误差,校正1.引言随着人们对卫星通信要求的不断提高,卫星通信技术得到了很大的发展。
其中,卫星多波束天线目前己成为提高卫星通信性能、降低系统成本的一项关键性技术。
多通道接收机是DBF 天线系统中信号的必经之路,正是这种多接收通道的结构,使DBF 天线系统增加了幅度和相位误差的潜在来源。
与多个天线阵列相连接的多个接收机通道必须要有很高的一致性,否则通道间的失配将严重影响数字波束系统的性能。
对多通道间误差的校正正是星载数字多波束天线的关键技术之一。
由于目前国内对星载DBF 天线的研究还处于初级阶段,所以需要更多的借鉴智能天线、自适应天线和雷达等领域已有的研究成果。
本文主要针对基于卫星应用的两维阵列DBF 天线系统,采用目前最常用的LMS 算法设计并在FPGA 中实现了对其前端射频多通道接收机的幅相校正系统,最后给出了测试结果。
测试结果表明,这种采用定点数制的LMS 算法对系统的幅相误差具有较好的校正性能。
2.数字多波束天线的幅相校正原理数字多波束天线的组成如图1所示。
前端天线阵是由多个天线单元组成两维阵列,阵元接收的信号经射频前端电路、A/ D 转换电路、数字下变频器后送入数字波束形成器处理。
[2][1]设计一个六边形排列的7单元天线阵,A/D后端的数字下变频器和波束形成器均采用FPGA 实现。
天线阵接收到的信号首先通过射频通道混频后得到中频信号,再将此模拟中频信号经过ADC 后得到数字中频信号,然后送入DDC 进行下变频;下变频后,每路信号分为正交的I、Q 两路,这些正交的信号再送入波束成形器中进行波束成形,最后的输出即为合成的波束。
数字多波束天线精密测距精度分析
数字多波束天线精密测距精度分析尹继凯;蔚保国【摘要】Considering the problem of multi-channel signal processing of digital multi-beam antennas in ranging applications,the influence of element phase center,array phase center,channel delay differences and antenna aperture transition time on ranging accuracy is analyzed,the relationship between channel delay differences and beam ranging results is given,and the test results are presented.It is shown that in a certain range,beam ranging error is the statistical average of channel delay differences,and so the beam ranging accuracy can be improved.%针对数字多波束天线在精密测距应用中所遇到的多通道信号合成处理问题,分析了单元天线相位中心、阵列天线相位中心、通道间时延不一致性和天线孔径渡越时延对测距精度的影响,给出了通道间时延偏差与合成波束测距结果之间的关系,并进行了试验验证。
研究表明:在一定范围内,各通道的时延偏差在波束形成输出端体现为统计平均效果,合成波束的整体测距误差会因统计平均效果而得到改善,合成波束测距误差也可以由通道时延的偏差来估计。
【期刊名称】《无线电工程》【年(卷),期】2012(042)003【总页数】4页(P27-30)【关键词】数字多波束天线;相位中心;通道不一致性;精密测距【作者】尹继凯;蔚保国【作者单位】河北省卫星导航技术与装备工程技术研究中心,河北石家庄050081;河北省卫星导航技术与装备工程技术研究中心,河北石家庄050081【正文语种】中文【中图分类】TN827.60 引言数字多波束天线以其同时具有阵列天线的波束扫描和数字信号高精度灵活处理的独特优势在移动通信、雷达和航天测控等领域得到越来越广泛的应用。
多波束天线通道幅相误差的自校正算法

多波束天线通道幅相误差的自校正算法王健【摘要】多波束天线利用多信号分类(MUSIC)算法对目标参数进行精确估计时,存在多波束天线的通道幅度和相位误差的失配现象,使MUSIC算法的性能严重下降;针对基于MUSIC的数字波束通道不一致问题,给出了一种新的基于MUSIC算法的最小化代价函数的波束无源自校正算法,利用阵列结构的先验知识对接收数据进行预处理,得到校正矩阵后自校正,并根据多波束阵列天线形成网络天线实测参数,加入随机幅度和相位误差进行计算机模拟仿真,验证仿真算法的正确性.【期刊名称】《计算机测量与控制》【年(卷),期】2010(018)001【总页数】3页(P211-213)【关键词】波达方向(DOA);多信号分类(MUSIC);波束天线;代价函数;自校正【作者】王健【作者单位】西北工业大学第365所,陕西,西安,710065【正文语种】中文【中图分类】TP2120 引言多波束天线是利用波束形成原理,实现波束的赋形覆盖,达到对目标参数精确估计的目的[1]。
自20世纪80年代以来,针对多波束形成理论,出现了许多高分辨阵列信号处理算法和技术,其中最具有代表性的是R.O.Schmidt提出的MUSIC算法[2]。
M USIC算法具有许多传统算法无法比拟的优点,然而在实际系统中应用时存在许多限制。
一个主要原因就是对系统的幅度相位误差比较敏感,系统在长时间工作过程中,器件老化和温度特性使得各通道的幅度和相位特性差异日益严重,即存在通道失配,这将使M USIC算法的性能严重下降[3-5],因此,多波束阵列幅相误差是其应用于实际系统的主要限制之一。
目前,对通道不一致性的校正主要有源校正和自校正[6-8]。
有源校正方法需要预先知道校正信号源的准确方向,只要预知了信号源的准确方向,就可以通过其产生校正矩阵,但这在实际应用中较难满足[6]。
自校正算法则主要是利用阵列结构的先验知识对接收数据进行预处理,目前的方法主要是利用阵列结构等先验知识对接收数据进行处理[7-8]。
一种高速多通道A_D幅相一致性修正的实现方法(精)
第32卷第6期2011年6月微计算机应用MICROCOMPUTER APPLICATIONSVol. 32No. 6Jun. 2011一种高速多通道A /D 幅相一致性修正的实现方法冀映辉1,2蔡炜1,2陈铭2(1中国科学院声学研究所北京1001902北京中科海讯电子科技有限公司北京100107)摘要:相控阵雷达系统中多个A /D通道之间幅度、相位特性存在的不可避免的差异,降低了后续雷达数字信号处理使用数据源的精确度,从而影响了雷达系统的分辨率。
针对这一问题,作者提出了一种自适应修正多A /D通道之间幅相不一致性的方法。
实验证明该方法实现简单、修正结果较好、有较强的工程应用价值。
关键词:相控阵雷达多通道A /D幅相不一致性修正数字下变频Design of RapidIO user -Level Communication Interface and Its ImprovementJI Yinghui 1,2,CAI Wei 1,2,CHEN Ming 2(1Institute of Acoustics ,Chinese Academy of Sciences ,Beijing 100190,China ,2Beijing Zhong Ke Hai Xun Electronics Technology Co. . Ltd. Beijing ,100107,China )Abstract :In phased array radar system ,multiple A /Dchannels have different amplitude and phase characteristics unavoidably. This difference reduces source data accuracy in radar digital signal processing and has seriously affecting on phased radar resolution. In or-der to solve this problem ,the author proposes an adaptive correction method which can revise this difference among different A /Dchan-nels. Experiment shows that this method is simple to realization ,has excellent correction results and Engineering applications. Keywords :phased array radar system ;multiple A /Dchannels ;difference amplitude and phase characteristics revise ;DDC在相控阵雷达信号处理系统中,每个阵面中的多个阵元需要同时接收雷达的回波信号。
数字波束形成系统多通道幅相校正方法及应用
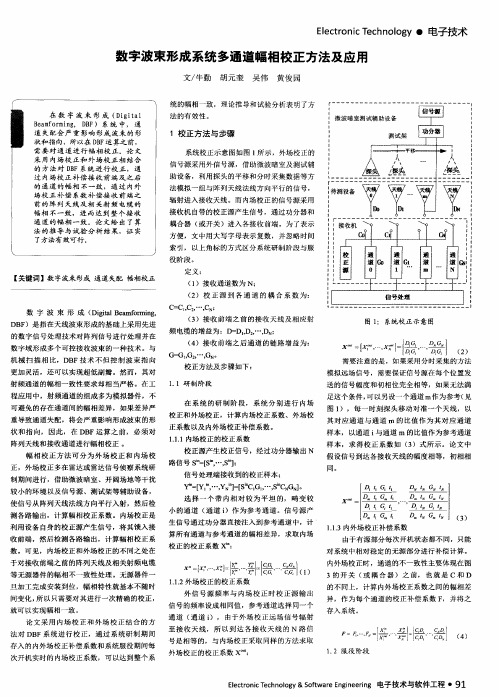
C=Cl,C2,… ,CN;
(3)接收前 端之前 的接 收天线 及相应射 频 电缆的增益为 :D=Dl,D2,…,DN;
(4)接收前 端之后通 道的链路 增益为 :
G--G 1,G2,… ,Gs。
校正方法及步骤如 下:
图 1: 系 统校 正 示 意 图
f 。。,圳N=l器,…, I
需 要 注 意 的是 ,如 果 采 用 分 时 采 集 的 方 法 模拟远场信号 ,需要保证信 号源在每个位 置发
射频通道的幅相一致性要求 却相 当严 格。在工 1.1研 制 阶段
送 的信号幅度和初相位完全相等 ,如果无法 满
程应用 中,射频通道 的组成多为模拟器件 ,不 可避免的存在通道 间的幅相差异,如果差异严 重导致通道失配 ,将会严 重影 响形成波束的形 状和 指 向,因此 ,在 DBF运 算之 前,必须 对 阵列天线和接收通道进行幅相校正 。
在 系 统的研 制 阶段 ,系统 分别进 行 内场 校正和外场 校正,计算 内场校正系数 、外场校 正系数 以及 内外场校正补偿系数 。 1.1.1内场校正 的校正系数
校正源产生校正信号 ,经过功分器输 出 N 路 信 号 sm=[s ,…,s 】:
信号处理端接收到 的校 正样本 : = [Y。 ,… ,YN 】=【S C。G 一,smCNGN]。
接 收 机
c
『 ]
直~旺墼.一电
(2) 校 正 源 到 各 通 道 的 耦 合 系 数 为 :
信号 处 理
数 字 波 束 形 成 (Digital Beamforming, DBF)是指在天线波束形 成的基础上采用先进 的数字信号 处理技 术对 阵列信号进行处理并在 数字域形成 多个可控接 收波束的一种技术 。与 机械 扫描 相 比,DBF技 术 不但控 制波 束指 向 更 加 灵 活 ,还 可 以 实现 超 低 副 瓣 。 然 而 ,其 对
持续改进的可对MIMO和波束控制表征的校准技术
是德科技持续改进的可对 MIMO 和波束控制表征的校准技术白皮书序言网络运营商一直在宣传他们可以提供最快的数据速率和最佳的覆盖范围。
但是当高清视频流等用例在您的日常生活中已变得司空见惯时,他们如何证实自己兑现了承诺?不断演进的 4G 技术正在推动着网络功能不断发展。
为了应对最终用户对更多数据密集型和带宽密集型任务的需求,通信行业已经开始着手研发 5G 技术。
网络要满足用户对庞大数据量的需求,其天线设计的演进是一个关键因素。
多天线阵列技术正在快速演进,使用 MIMO 和高阶 MIMO 成为满足这些新用户要求的不可或缺的功能。
为了迎合需求,网络设备制造商(NEM)正在开发使用波束赋形的 8x8 MIMO 解决方案,甚至是 16x16 MIMO 配置的解决方案,但这些解决方案尚未列入 3GPP 标准。
MIMO 和相控阵技术可以为网络提供增强功能,通过路径分集、空间多路复用和波控/波束赋形等技术实现更高的数据吞吐量和高数据完整性。
路径分集通过消除信道中的本地衰落,保证了数据的稳健性。
空间复用可以为单个用户提供更高的吞吐量,或为多个用户提供更高容量。
波束控制或波束赋形技术能够为特定用户提供一个高度定向的传输波束,显著提高信号强度和 SINR。
本白皮书重点讲解了多信道测试接收机所需要的校准方法,以确保其能够高效表征和显示下一代通信发射机设计的 MIMO 和波束赋形性能。
测试系统在进行多天线表征时的考虑因素波束赋形并不是一项新技术,它已问世数十年之久,目前广泛应用于雷达、地震学和声学等领域。
在无线通信领域,通过在阵列中的不同元件之间应用相位和幅度偏置,可以产生空间选择性,从而实现定向传输。
通过加入有益的信号(即相位、相干)信号,并消除有害(即超出相位)的信号,可以提供良好的空间选择性和方向性。
波束控制技术的实施方法是,调整每个天线单元的相对相位,并对发射波形施加有益和有害干扰以形成预期的波束方向图。
同样地,MIMO 和波束赋形为多信道发射机实施设定了严格的要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多波束天线通道幅相一致性校正及实现朱丽龚文斌杨根庆(中科院上海微系统与信息技术研究所,上海 200050)摘要:本文针对多波束天线接收机的通道幅相一致性校正,提出了一种基于自适应算法的校正方法并在FPGA 中实现了该方法。
在满足系统要求的前提下,该方法不但实现起来相对容易,而且算法的精度和动态范围也有一定的保证。
仿真和试验结果表明,该方法是可行的。
关键词:多波束天线,通道失衡,幅相误差,最小均方误差,校正1.引言随着人们对卫星通信要求的不断提高,卫星通信技术得到了很大的发展。
其中,卫星多波束天线目前己成为提高卫星通信性能、降低系统成本的一项关键性技术。
多通道接收机是DBF 天线系统中信号的必经之路,正是这种多接收通道的结构,使DBF 天线系统增加了幅度和相位误差的潜在来源。
与多个天线阵列相连接的多个接收机通道必须要有很高的一致性,否则通道间的失配将严重影响数字波束系统的性能。
对多通道间误差的校正正是星载数字多波束天线的关键技术之一。
由于目前国内对星载DBF 天线的研究还处于初级阶段,所以需要更多的借鉴智能天线、自适应天线和雷达等领域已有的研究成果。
本文主要针对基于卫星应用的两维阵列DBF 天线系统,采用目前最常用的LMS 算法设计并在FPGA 中实现了对其前端射频多通道接收机的幅相校正系统,最后给出了测试结果。
测试结果表明,这种采用定点数制的LMS 算法对系统的幅相误差具有较好的校正性能。
2.数字多波束天线的幅相校正原理数字多波束天线的组成如图1所示。
前端天线阵是由多个天线单元组成两维阵列,阵元接收的信号经射频前端电路、A/ D 转换电路、数字下变频器后送入数字波束形成器处理。
[2][1]设计一个六边形排列的7单元天线阵,A/D后端的数字下变频器和波束形成器均采用FPGA 实现。
天线阵接收到的信号首先通过射频通道混频后得到中频信号,再将此模拟中频信号经过ADC 后得到数字中频信号,然后送入DDC 进行下变频;下变频后,每路信号分为正交的I、Q 两路,这些正交的信号再送入波束成形器中进行波束成形,最后的输出即为合成的波束。
接收通道在制造时的各种误差、电路器件的选择,A/D的量化精度、DDC 的性能、I/Q两路的正交误差等因素都会引起信号幅度和相位的变化。
为了能够正确的波束成形,达到系统的精度要求,就必须要对多通道接收机进行校正,校正系统原理图如下图2所示。
图1 数字多波束天线的组成原理图图2 一个通道的校正原理框图针对7单元的DBF 天线阵,我们可以选择其中一路RF 接收通道作为参考信道,在DBF 天线系统开机使用时,首先注入校正信号通过自适应滤波器对多通道接收机进行幅相一致性的校正,校正完毕后进入工作状态。
考虑到器件老化、工作环境变化等问题,系统在使用过程中每隔一段时间还要进行一次自动校正。
从多波束天线的原理图中可以看出,接收通道、A/D和DDC 都可能产生幅相误差,因此将自适应滤波器置于DDC 之后,这样就可以不具体讨论误差是由哪个模块产生的,而是直接对波束成形之前所有模块产生的累积误差进行校正。
3.自适应算法的比较和选择根据自适应滤波算法优化准则的不同,自适应滤波算法可以分为两类最基本的算法:最小均方误差(LMS 算法和递推最小二乘(RLS 算法。
目前常用的主要有以下几种:①变步长自适应滤波算法由于固定步长的自适应滤波算法在收敛速度、时变系统跟踪速度与收敛精度方面对算法调整步长因子μ的要求是相互矛盾的,为了克服这一矛盾,人们提出了许多变步长自适应滤波算法,即在初始收敛阶段或未知系统参数发生变化时,步长应比较大,以便有较快的收敛速度和对时变系统的跟踪速度;而在算法收敛后,不管主输入端干扰信号v(n 有多大,都应保持很小的调整步长以达到很小的稳态失调噪声。
②RLS 自适应滤波算法RLS 算法对输入信号的自相关矩阵Rxx(n)的逆进行递推估计更新,收敛速度快,收敛性能与输入信号的频谱特性无关。
但RLS 算法的计算复杂度很高,所需存储量极大,不利于适时实现;倘若被估计的自相关矩阵Rxx (n)的逆失去了正定特性,这还将引起算法发散。
③变换域自适应滤波算法Dentino 等1979年首先提出了变换域自适应滤波的概念,其基本思想是把时域信号转变为变换域信号,在变换域中采用自适应算法。
这样就可以通过作某些正交变换使输入信号自相关矩阵的特征值发散程度变小,提高收敛速度。
④仿射投影算法仿射投影算法最早由K. Ozeki 和T. Umeda 提出,它是能量归一化最小均方误差(NLMS 算法的多维推广。
它的性能介于LMS 算法和RLS 算法之间,其计算复杂度比RLS 算法低。
除了上面介绍的自适应滤波算法之外,还有一些其它的算法,如:系数部分更新自适应滤波算法、LMF (RLF 算法、Leaky-LMS算法等。
其主要思想是在自适应滤波算法的每次迭代中,仅仅自适应滤波器的部分系数被更新,这使得整个自适应滤波算法的计算量有所降低。
由上面的介绍可以看出,不同的自适应算法各有其优缺点。
考虑到多波束天线的校正系统需要对多个射频接收通道进行校正,不能选择算法复杂、存储量大、占用资源多的算法,同时由于系统对实时性要求不高,因此可以采用收敛速度相对较慢的自适应算法。
综合各项要求,最终采用了LMS 自适应算法,该算法具有良好的收敛特性,结构简单,鲁棒性强。
下[3]面主要讨论LMS 自适应滤波器在FPGA 中的定点实现。
4.LMS自适应滤波器的FPGA 实现4.1 LMS算法原理基于最速下降法的最小均方误差(LMS 算法的迭代公式如下:e (n =d (n −X (n t ∗W (nW (n +1 =W (n +2∗μ*e (n *X (nW (n T L −−滤波器的阶数d (n −−期望输出值X (n =[x (n , x (n −1... x (n −L+1 ]T e (n −−误差= [w (n 0, w (n 1... w (n L −1]μ--步长因子其中X(n表示时刻n 的输入信号矢量,W(n表示时刻n 的自适应滤波器的权系数。
LMS 算法收敛的条件为:0 <μ< 1/λmax ,λmax是输入信号自相关矩阵的最大特征值。
4.2 LMS算法的FPGA 实现4.2.1 算法中数制的确定众所周知,精度是靠有效字长来保证的。
全浮点制,能最大程度保证算法的精度和动态范围,但速度慢且无法在FPGA中实现;而传统的全定点制虽然速度快,但无法获得算法所需的精度,而这很有可能最终导致算法根本不收敛[5,6]。
可见,合理的数制能兼顾算法的精度和动态范围。
进入FPGA的7路数据在通过A/D 时保持了满量程最多的有效位,FPGA芯片内部采用18 位的硬件乘法器。
因此,在资源够用的前提下,采用18位硬件乘法器来实现算法。
首先根据Matlab的仿真确定算法各步骤中的变量范围。
由于进入FPGA的数据的大小范围是确定的,那么通过仿真可以得到各个中间变量的变化范围,这为后面确定各步骤的数制提供依据。
改进的定点制与传统的定点制的不同点在于小数点定标和乘积的截取。
根据仿真得到的动态范围就可以确定各变量的小数点定标。
xi(n 取18bit,假设输入信号为 x=A*sin(n),其中A的变化范围为-2~+2,因此可以用两位来表示整数部分,将小数点定标在第14bit上,这样就可以在满足动态范围的前提下提供最好的精度。
同样参考信号d(n也定标在第14bit上。
根据仿真结果,wi(n的范围在-1~+1之间,因此它的小数点定标在第15bit上。
又 e(n=d(n-y(n,因此y(n的定标与d(n相同。
具体如图3示。
在算法的中间过程中,为了保证收敛性能,中间变量都尽量保持最大的精度,尽量减少经过乘法器后的数据截位。
图3 算法各中间变量的定标4.2.2 LMS滤波器的FPGA实现由于本文所设计的自适应滤波器是用于星载DBF天线的,因此其输入输出的数据位数都必须与整个天线系统兼容。
根据系统要求,设计该滤波器为8阶,输入信号x(n、输入期待响应d(n经A/D采样后为11bit,送入滤波器后首先进行数位扩展,将其扩展为18bit以确保运算中的精度。
整个系统采用100M的片内时钟,滤波器的结构框架如下图4。
两个通道的信号同时送入滤波器中,一路作为基准信号d(n送入d延时器中,另外一路作为需要调整的信号x(n送入X寄存器中。
由于本滤波器是8阶的,因此X寄存器采用的是8阶的移位寄存器。
将X寄存器中的8个x数据同时送入Y累加器中,与8个滤波器系数W(n)相乘累加出Y。
Y送入计算e的模块,需要注意的是d和Y必须针对同一个时刻,这样才能正确的计算出e(n,因此加入一个d 延时器使得d和Y在时序上对齐。
将算好的e(n送入△W模块中,同样为了保持e (n和X (n的时序对齐,此处加入了X延时器。
另外,为了减少乘法器的个数,将2μ取为1/32,即只要右移5位即可。
最后将得到的一组△W送入更新W的模块中,计算出一组新的W(n+1。
更新后的W(n+1再次送入Y累加器中,和 (n+1时刻的x值相乘后再进行y的累加。
同时还将W(n+1送入更新W的模块,和△W(n+1一起进行下一次的W的更新。
图4 滤波器的框架结构 4.3 仿真结果假设输入信号均为单频信号, x(n = Ai * sin(ωt + ϕi........(i = 1,2 ,频率为2MHz,滤波器系数的初始值全部为零,则两路信号的幅度不平衡度为ΔR = 20lg(A2 / A ,相位不平衡度为1 Δ ϕ = ϕ2 − ϕ 1 ,收敛条件是e≤1×10-8。
仿真结果见下表1。
表1 8阶LMS滤波器仿真结果收敛时收敛时间△R(dB △φ(º (10 s) 5 -5 △R(dB △φ(º 间(10 s) 1.88 2.22 2.32 2.32 2.82 2.92 - 30 -1 µ1= 1/16 -2 60 90 30 60 90 1.03 1.17 1.22 1.28 1.47 1.52 µ2= 1/32 -2 -1 30 60 90 30 60 90 从上面的表格中可以看出,幅相误差相同的情况下,步长越大收敛时间越短(注意所选步长必须在满足收敛条件的步长范围内);而步长相同的情况下,幅相误差越大收敛所需时间越长。
我们预期的目标是通过校正后,系统的幅度不平衡:≤ 0.1 dB,相位不平衡:≤0.5°。
通过仿真可以知道,在目前采用的定点数制的条件下,当通道间的幅度误差≥-2.38 dB、相位误差在(−π / 2 ~ π / 2 )时,该滤波器可以迅速将两个通道的幅相特性校正到一致,达到幅度不平衡:≤ 0.01 dB,相位不平衡:≤0.1°,满足系统要求。