整周模糊度的解算
基于判别式的整周模糊度解算方法

Ab t a t On o sr p i gme h db s d o ed s r n n i e , wh c ec mb n t n o t mb g i s l t nme h d , sr c : eBo tt p n t o a e nt ic i a t s v n a h mi ig i hi t o i ai f woa i u t r o u i t o s sh o y e o L AM BDA n o sr p i g T i meh d ma e l u eo t e d a t g f a dBo tta p n . h s t o k s u l s f h v n a eo LAM BDA ih h sl we s e t n ea v n a e f a wh c a o r mis dr ea dt d a tg a h
关键 词 : 球 定 位 系统 ; 最 小 二 乘 降 相 关 平 差 ; 自展 法 ; 整 周 模 糊 度 ; 整 数 最 小 二 乘 搜 索 全
中图法分 类号 : P 9 T 31
文献标 识码 : A
文 章编号 :0 072 2 1) 718 -3 10—04(0 0 0 —550
M eh d o t o sf rGPS i tg ra n e e mbiui r s l to s do ic i i a t g t e o u i nba e n d s rm n n y
计 算 机 工 程 与 设 计 C mpt E g er g n Dein o ue n i ei d s r n na g
2 1,1() 00 3 7
18 55
基于GNSS系统的整周模糊度解算算法仿真

the carrier phase observations,the process of solving the whole⁃period fuzzy of the LAMBDA algorithm is analyzed and designed
in this paper. An algorithm that uses covariance decomposition to reduce the correlation between the numbers of ambiguity
修回日期:2018⁃11⁃02
1
最小二乘搜索
载波相位观测模型 [3]如式(1)所示:
y = Aa + Bb + v
(1)
式中:y 是 n × 1 维的载波相位观测量;a 为 m × 1 维的整
周模糊度;b 为 t × 1 维的基线向量;A ,B 为相应的整周模
糊度数、基线向量系数矩阵。
最小二乘算法通过最小化误差的平方和来获得参
算法 [2]。其主要思想是基于最小二乘方法的搜索方法。
通过对基于最小二乘搜索法中出现的协方差矩阵进行
处理,降低模糊度相关性,以此来提高搜索的效率。
本文进行了整周模糊度搜索的主要算法相应的
Matlab 仿真,比较了 LAMBDA 算法在不同协方差分解方
式下整周模糊度搜索域即搜索性能,可以为整周模糊度
收稿日期:2018⁃10⁃10
subsequent pose calculation.
Keywords: integer ambiguity algorithm; Z transform; covariance matrix factorization; LAMBDA algorithm; Matlab
整周模糊度解算方法

整周模糊度解算方法嘿,朋友们!今天咱来聊聊整周模糊度解算方法。
这玩意儿啊,就像是一把解开神秘大门的钥匙。
你看啊,整周模糊度就像是一团乱麻,我们得想办法把它理清。
这可不是一件容易的事儿,但别怕,咱们有办法对付它!想象一下,我们在一个迷宫里,到处都是弯弯绕绕,而整周模糊度就是那些让我们晕头转向的岔路。
那怎么找到正确的路呢?这就需要用到我们的解算方法啦。
首先呢,我们得有耐心,不能着急。
就像钓鱼一样,得慢慢等鱼儿上钩。
我们得仔细分析那些数据,一点一点地去琢磨。
有时候可能会觉得很枯燥,但是坚持下去,说不定就会有惊喜哦!然后呢,我们要运用各种技巧和工具。
这就好比我们有不同的工具来对付不同的难题。
有时候一个巧妙的算法,就能让那团乱麻瞬间变得清晰起来。
比如说,我们可以通过一些特定的模型来预估整周模糊度的大致范围,这就好像我们先知道了宝藏大概在哪个区域,然后再去仔细寻找。
还有啊,我们可以利用一些统计方法来筛选出最有可能的解,这就像是在一堆沙子里找出金子一样。
而且哦,这个过程中可不能马虎。
就像盖房子,一块砖没放好,可能整栋房子都会不稳。
我们得认真对待每一个数据,每一个步骤。
其实啊,整周模糊度解算方法在很多领域都有大用处呢!比如在导航系统里,要是没有它,我们怎么能准确地找到自己要去的地方呢?在测量领域,它更是不可或缺的。
朋友们,想想看,如果没有这个神奇的方法,我们的生活得失去多少便利呀!所以啊,可别小瞧了它。
总的来说,整周模糊度解算方法就像是一个隐藏在数据世界里的宝藏,等待着我们去挖掘。
只要我们有耐心、有技巧,就一定能把它找出来,让它为我们服务!让我们一起加油,去探索这个充满奥秘的领域吧!。
整周模糊度在线解算的综合法研究
噪声干 扰等 原 因,相位观 测 量可 能产 生周跳 ,一旦
发生周 跳 则必须 重新 初始确 解算 出整 周模 糊度 ,载波 J J
相位观 测值 即可 转换 为高精度 的站星距 离测量 值 , 进 而 实现厘 米级 精度 的动态 定位 。
・ 6・ 2
现 代 导 航
21 0 0正
整周模糊度在线解 算的综合法研究
汤云 ,朱启仁 ,解 晶
( 放 军 9 9 1 队 , 宁葫 芦 岛 15 0 ) 解 24 部 辽 2 0 1
摘 要: 针对 空中小 目标运动的特点, 分析 G S P 载波相位测量容 易产生信号失锁和周跳的原 因,提 出解决测量难题的关键技术是快速在线解算整周模糊度。在阐述几种模糊度在线解算方法 优缺点的基础上 , 出一种整周模糊度动态快速解算方法。该方法综合其它方法的优点,充分利 提
i c o d n ewi emo i g f au eo ra mal a g t. d e p an d t e k y tc n q eo l i gt eme u e n i c l n a c r a c t t v n e tr f e l hh a i s l t r e s An x l i e e e h iu f o v n a r me t f u t h s h s di y
T NGYnZ i e, I i A u, HUQ— nXEJn t g
A bs r c : i a e n lz dt erao a sdGPSs n l no kn n y l l eGP are h s es rme t t a t Ths p ra ay e e s ncu e p h i a lc iga dc cesi i t Sc rir aem a ue n g u pn h p
如何解算整周模糊度(220112447李庆)

220112447 李庆 指导老师 高成发
文献目录
• • • • • • • • • • 《GPS变形监测中整周模糊度解算的新方法》 《GPS动态定位中整周模糊度的快速解算》 《差分GPS载波相位整周模糊度快速解算方法》 《短基线GPS控制网双差整周模糊度的直接解算方法》 GPS 《基于判别式的整周模糊度解算方法》 《浅谈网络RTK的先进性》 《中长基线GPS网络RTK模糊度快速解算的方法》 《一种快速求解整周模糊度的方法》 《一周整周模糊度快速求解的改进LAMBD方法》 《利用改进遗传算法求解整周模糊度》
DC算法(direct calculation)
实验内容
实验结论
采用TRIMBLE5700接收机采集实测的GPS 数据,采样率为15s,采集时间为2h,通过 TGP5.1计算的已知点的坐标(单位:m) 分别为 (2794583.3077,4649775.1620,3342969.644 2)和(-2793370.676。3343690.6012), 基线长为1425、4537m。组成5个卫星对, 以4号星为参考星,使其和观测卫星构成 PDOP等于最小,分别按照DC算法和一般 的单历元解算方法算得卫星对4-7,4-8,411,4-20,4-28的L1波段的整周模糊度。以及 比较两种方法解算整周模糊度的最大值和最 小值。
基于判别式的整周模糊度解算方法
原理: 原理:基于判别式条件的Bootstrapping方法是将LAMBDA和Bootstrapping两种GPS双差整周 模糊度的估计算法相结合。同时具有LAMBDA算法漏检率低和Bootstrapping算法计算复 杂度低的优点,且克服了LAMBDA算法中整数最小二乘搜索计算复杂度高和 Bootstrapping算法检漏率高的缺点。该方法快速准确。 流程图: 流程图:
用于高精度实时动态定位的整周模糊度解算

用于高精度实时动态定位的整周模糊度解算
1高精度实时动态定位
当今科技发展下,人们对于定位技术要求越来越高,更加精准、快速、准确。
而高精度实时动态定位正是为了满足这一需求,寻求一种高精度实时动态定位的最优解。
整周模糊度解算,就是在这样的背景下展示出来的一种技术,它能够最大限度的准确的描述物体的位置。
整周模糊度解算又称为时域模糊度解算,是基于模糊控制理论的一种定位技术,它的原理是用未知物体的动态变化观察模式,从时域模糊度解和空间测量技术共同结合的结果中提取出未知物体的位置。
整周模糊度解算改变了传统定位技术采用预先确定"物体静止"假设的做法,采用动态监测变化观察"物体移动"状态,动态变化更为准确,精度也更高。
另外,由于它采用了空间测量技术,整周模糊度解算可以获得更加完整的位置参数,更加清晰的位置表示。
总的来说,整周模糊度解算以其准确性、高精度、快速性、完善的参数表达,成为当下一种得到广泛应用的高精度实时动态定位技术。
它不但在公共安全、交通运输、移动服务及物流等行业有着实质性的作用,更是成为当今定位技术发展的一大亮点,也是未来有应用发展的潜力的一种技术。
GPS整周模糊度解算方法

GPS 整周模糊度解算方法探讨一、为什么要解算GPS 整周模糊度?整周模糊度的确定是载波相位测量中的关键问题,这是因为:(1)精确的、不足1周的相位观测值()φr F 和修复周跳后的正确的整周计数()φInt 只有与正确的整周模糊度配合使用才有意义。
模糊度参数一旦出错,就将导致大量的卫地距出现系统性的粗差,从而严重损害定位的精度和可靠性。
正确确定整周模糊度N 是获得高精度定位结果的必要条件。
(2)在一般精度的GPS 定位中,定位所需的时间实际上就是正确确定整周模糊度所需要的时间。
快速确定整周模糊度对提高GPS 定位的作业效率具有极其重要的作用;对开拓GPS 定位技术的应用领域,将其推广应用到低等级控制测量和一般的工程测量等领域也具有极其重要的作用。
二、GPS 整周模糊度解算方法1、LAMBDA 法1993年荷兰Delft 大学的Teunissen 教授提出了最小二乘模糊度降相关平差法,简称LAMBDA 法。
该方法可缩小搜索范围,加快搜索过程,是目前快速静态定位中最成功的一种模糊度搜索方法。
LAMBDA 法的基本原理: (1)整数变换在LAMBDA 法中,并不直接对整数模糊度参数N 进行搜索,而是先对初始解中的实数模糊度参数⎪⎭⎫⎝⎛=∧∧∧∧n N N N N ,......,,21及其协因数阵∧N Q 进行整数变换:∧∧⋅=N Z z TZ Q Z Q NT z⋅⋅=∧∧式中Z 为整数变换矩阵。
整数变换具有以下特点:当N 为整数时,变换后的参数z 也为整数;反之,当z 为整数时,经逆变换后所得的()z Z N T⋅=-1也为整数。
整数变换并不是唯一的。
我们希望整数变换后所得到的新参数⎪⎭⎫⎝⎛=∧∧∧∧n z z z z ,......,,21之间的相关性能显著减小,其协因数阵∧z Q 中的非对角线元素5.0≤,模糊度参数的方差也能大幅度减小。
注意,整数变换指的是具有上述特性的一种数学变换方法,但并非只能对整数进行变换。
如何解算整周模糊度(220112447李庆)
卡尔曼算法
思路: 思路:首先利用卡尔曼算法求解整周模糊度的浮点解;其次确定搜索空间,对协方差阵进 行Cholesky分解,削弱其相关性;最后用ratio检验得出最终解。 优势: 优势:有效地利用了多历元信息提高了浮动解的精度,并且在去相关过程中解决了方差阵 必须为正定阵的问题,避免出现病态分解,使得搜索空间得到明显的改善,提高了效 率。 原理: 原理:首先利用卡尔曼方程求浮动点解。设有两接收机k i 观测了两卫星j o,则载波相位 双差方程为: ▽ΔΦj,o(t)=1/λ[Rko(t)-Rio(t)-Rkj(t)+Rij(t)]-▽ΔNj,o+V(t) (5) ▽ΔΦ为双差载波相位观测量,▽ΔN为整周模糊度,λ为波长,R为卫星到接收机的 距离,V为残差向量。将方程式(5)线性化后建立常加速度模型下的卡尔曼滤波。 为求得整周模糊度的最终解N,再利用Cholesky分解后的搜索过程中,保留最小的F1和次小 的F2所对应的模糊度的组合,当某一F的前i项之和大于F2时就可舍弃前i项的全部模糊 度组合,减少二次型的计算量,削弱模糊度的相关性,从而大大提高搜索效率。 搜索完成后对F1和F2再进行ratio检验。
DC算法(direct calculation)
优势: 优势:在变形监测网中监测点坐标已知,DC算法可以不需要组成和解算方程,甚至不需要 搜索和确认。可以直接计算整周模糊度。速度快,精度高。 缺陷: 缺陷:仅适用于变形监测网中。 如图1所示,设j为参考卫星,则可以得到单差观测方程如 原理: 原理: 下: (∆N1-2j+∆Φ1-2j)λ=∆ρ1-2j+c(Vt1R-Vt2R) (∆N1-2k+∆Φ1-2k)λ=∆ρ1-2k+c(Vt1R-Vt2R) 由(1)(2)相减可以得到双差观测方程为: (∆N1-2k-∆N1-2j+∆Φ1-2k-∆Φ1-2j)λ=∆ρ1-2k-∆ρ1-2j (3) 即 ▽∆N1-2kj=▽∆ρ1-2kj/λ-▽∆Φ1-2kj 式(4)即为直接计算整周模糊度的DC算法。 (4) (1) (2)
gnss模糊度解算 -回复
gnss模糊度解算-回复GNSS模糊度解算是一种关键的技术,用于全球导航卫星系统(GNSS)的精密定位和导航。
GNSS是一种卫星导航系统,由多个卫星和地面接收器组成,可以提供全球范围内的位置信息和导航服务。
模糊度解算是通过处理卫星信号的特征,精确测量GNSS接收器与卫星之间的距离,从而实现更准确的定位和导航功能。
为了更好地了解GNSS模糊度解算,可以按照以下步骤进行回答:1. GNSS基本原理:- 卫星发射精确的时钟信号,地面接收器接收到这些信号;- 地面接收器接收多颗卫星的信号,并测量接收器与每颗卫星之间的距离;- GNSS接收器通过测量到的距离来计算出自己的位置。
2. GNSS模糊度问题:- GNSS接收器测量到的卫星距离是伪距,包含了卫星发射信号时钟误差和接收器时钟误差;- 这些误差会导致距离测量的不精确,进而影响定位和导航精度;- GNSS模糊度问题是指无法准确测量到卫星与接收器之间的整数倍波长距离。
3. 解决GNSS模糊度的方法:- 单差解:通过引入额外的观测量,如不同接收器之间的差分观测,可以消除一部分模糊度;- 双差解:利用两组差分观测值,可以进一步提高模糊度的解算精度;- 三差解:通过利用三组差分观测值,可以进一步提高解算精度;- 多差解:利用多个接收器和多组差分观测值,可以更准确地解算模糊度。
4. 整周模糊度解算:- 整周模糊度是指卫星与接收器之间整数倍波长距离的模糊度;- 整周模糊度解算通常需要借助外部信息,如接收器位置固定、基准站数据等;- 常用的解算方法包括:整周模糊度固定、宽巷模糊度抗差估计等。
5. 小数模糊度解算:- 小数模糊度是指卫星与接收器之间非整数倍波长距离的模糊度;- 小数模糊度解算通常利用差分载波相位观测值;- 常用的解算方法包括:整数化解算方法、变换算法等。
6. GNSS模糊度解算的研究进展:- 随着GNSS技术的不断发展,模糊度解算方法也在不断创新和改进;- 新的解算方法,如基于波束形成的解算方法、基于多频率观测的解算方法等,能够提高解算精度和鲁棒性;- 同时,应用GNSS模糊度解算的领域也在不断扩展,如高精度测量、时空同步、航空航天等。
载波相位测量中整周模糊度的解算与仿真

2004 年 2 月 第 22 卷 第 1 期航 天 控 制Aerospace C ontrolFeb. 2004 V ol 122 ,N o 11文章编号 :1006Ο3242 (2004) 01Ο36Ο06载波相位测量中整周模糊度的解算与仿真田亚军 徐 晖 姜文利 周一宇国防科技大学 ,长沙 410073摘 要 对整周模糊度解算全过程进行描述并提出 G PS 信号受到干扰条件下确定整周模糊度的 一种方法 。
该方法将惯导伪距作为待定点目标位臵的近似值 , 代入双差相位测量方程里 , 推导出误差项 , 通过最小二乘算法得到实数解的整周模糊度 , 再分别通过快速模糊度搜索法和综合模糊 度搜索法进行整周模糊度搜索 , 通过仿真检验该方法的正确性同时对比两种算法性能 。
主题词 整周模糊度 组合导航 C holesky 分解 中图分类号 : V448 . 25 文献标识码 : AThe R esol u tion and Simu lation of the Integer Ambiguityof Carrier W ave Pha s e Mea s urmentT ian Y ajun Xu Hui J iang Wenli Zhou Y iyu Nati onal University of Defense T echnol ogy , C hangsha 410073AbstractThe paper depicts the whole proc ess of solving the interger ambiguity and pr esents a kind of algorithmwhich regard I NS ’s output as the target ’s approximate positon . A n d we can achieve a real root of integer ambi 2guity f r om the least squar e sol ution . Then the r ight integer ambiguity can be searched thr ough the integer ambi 2guity searching way . The simulation results show that the positioning accuracy reach centimeter s ’level .Sub ject ter m s Inte g er AmbiguityInt e gr ated navigation Cholesky Factor ization索算法进行描述 ,本文对整周模糊度解算全过程进 行描述并提出 G PS 信号受到干扰条件下确定整周模糊度的一种方法 。
整周模糊度的求解方法

GPS整周模糊度的求解方法遥感学院地理信息系统摘要:高精度GPS定位,必须采用相位观测量。
接收机纪录的只是相位差的小数部分,而初始的整周部分N 是初始观测历元卫星和观测站间距离相对于载波波长的整数,称为整周模糊度,是未知的。
在GPS 定位中,得到模糊度初值后,如何选择合适的搜索准则和解算方法将直接影响定位的效率。
本文分析了几种常用的整周模糊度的求解算法的优缺点,并详细讲解了整周模糊度的求解的具有较大优势的新方法。
关键字:GPS,整周模糊度;伪距法;经典待定系数法;多普勒法;快速模糊度解算法,整周模糊度函数法,多历元,最小二乘精密型GPS信号接收机都具有伪距和载波相位两种基本观测量,载波相位观测量能提供厘米级精度的相对定位成果.但由于载波相位测量存在整周模糊度解算问题,致使其用于快速定位及导航时有些困难,快速而准确地求解模糊度,就成了问题的关键载波相位观测量是进行GPS高精度定位的重要信息。
目前,利用载波相位观测量及载波相位的差分技术是获得高精度定位得主要方法。
而这种定位方是以整周模糊度的正确求解为前提的,一个整周数值的错误,将会产生0.2m左右的定位偏差。
因此整周模糊度的解算是利用载波相位观测值进行高精度导航定位的核心问题。
确定整周模糊度的一般方法:整周模糊度求解的理论及其实用研究是近一、二十年的研究热点和难点。
许多学者提出了一些解算方法,其中快速模糊度解算法、整周模糊度函数法、经典待定系数法、多普勒法(三差法)、伪距法为常用的方法。
1. 快速模糊度解算法(FARA)[J]快速模糊度解算法FARA是一种基于统计检验的算法.首先用一组相位观测数据进行双差解,求解出实数的双差相位模糊度和位置参数.然后,根据解的统计信息,建立置信区间,对每一组落在该置信区间的模糊度组合进行检验,找出一组既能满足统计检验,又具有最小方差的模糊度组合作为正确的模糊度解'".FARA的采样时间很短,利用少量观测量进行初次平差计算所求得的基线和模糊度参数的精度并不高,与它们最接近的整数不一定就是正确的整周模糊度.但是大约有99%的可能性,正确的整数是落在置信区间内的.因此,将全部模糊度参数的候选值排列组合起来.正确的一组整数组合必然在其中,接着通过各种检验,将不正确的整数组合先行剔除,将可能正确的少数组合保留下来,将保留下来的整数组合作为已知值代人重新进行平差计算,计算的一组整数组合所产生的单位权方差应为最小,根据这一原理将正确的一组整周模糊度挑选出来.2. 整周模糊度函数法[J]模糊度函数法AFM是利用模糊度的整数特性来确定模糊度的一种方法。
整周模糊度名词解释

整周模糊度名词解释
整周模糊度作为一种概念,源于数据科学和分析学,用来描述数据在一段时间内的变化趋势。
它通常用来指标定时段内的趋势波动,是评估某一现象的变化程度的有效方法之一。
整周模糊度是指一定时间内变量的模糊度,表示该变量整体模糊度,即期间内变量比例变化的程度。
它指的是一种广义的模糊度,可以衡量整体变动情况,但也可以表征精细的变动。
从数学角度,整周模糊度可以用以下方式来计算:首先,将变量的值按照时间分开,然后,把变量的值转换为频率,然后,根据频率计算整周模糊度,其表达式为:整周模糊度=1-∑(第i个变量的值与前一个变量的值的偏差的绝对值的四次方)/∑(第i个变量的值的四次方) 。
整周模糊度能够反映近期变动的程度,并能迅速准确地发现突发事件对变量的影响,从而提升对数据变动趋势的洞察力。
此外,它与其他类似分析技术比较,具有更高的数据聚合度,能够更加准确地描述一定时间范围内的变化趋势。
整周模糊度技术在很多领域得到了广泛应用,比如金融业、互联网、销售等。
在金融行业,可以基于整周模糊度对金融市场进行数据分析,更精准地预测市场趋势;在互联网领域,可以基于整周模糊度进行商品流行度分析,即将互联网用户行为和关键词进行分析,迅速发现商品的流行度;另外,在销售领域,可以基于整周模糊度对销售趋势进行分析,及时发现是否存在重大变化;此外,还可以通过整周
模糊度实时监测网站流量,从而更好地了解网站的使用情况。
总的来说,整周模糊度的出现丰富了数据处理的手段和方法,大大提高了数据分析技术的可靠性,使各行各业能够更准确地分析和预测数据变动趋势,从而更好地驾驭经济趋势,更好服务社会和客户。
整周模糊度的快速求解算法
整周模糊度的快速求解算法
1.1 备选整周模糊度解集的确定利用GPS双差载波相位测量时,其数学模型为:
P0/0、X0/0初值的选取取决于对基线向量和初始模糊度范围的了解,基线分量及其变化速度分量初值可取为零,方差初值根据载体的动态情况选择,整周模糊度分量初值可取为伪距双差观测值,方差初值根据伪距的测量精度选择。
如果系统动态模型建立得比较准确(如静态时或载体运动规律已知时),则当卡
尔曼滤波器稳定后,整周模糊度估计值一般具有较高的精度,可以直接取与其最接近的整数作为整周模糊度,但一般需要较长的时间才能得到正确的模糊度,对于实时性要求较高的场合不适用。
实际应用时一般是当Kalman滤波达到一
定
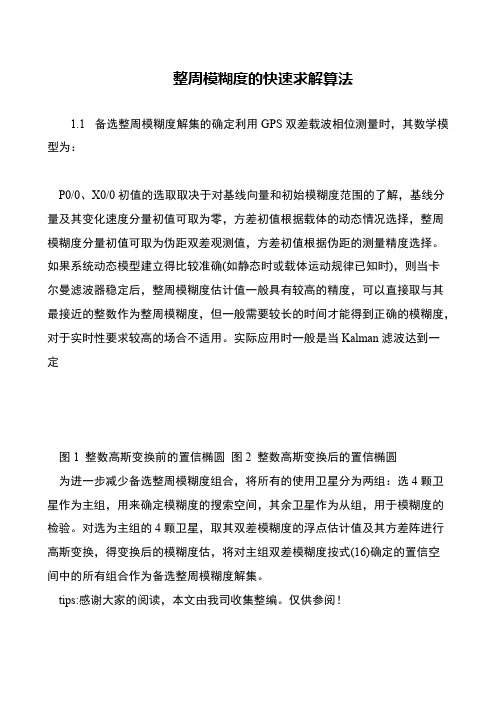
图1 整数高斯变换前的置信椭圆图2 整数高斯变换后的置信椭圆
为进一步减少备选整周模糊度组合,将所有的使用卫星分为两组:选4颗卫星作为主组,用来确定模糊度的搜索空间,其余卫星作为从组,用于模糊度的检验。
对选为主组的4颗卫星,取其双差模糊度的浮点估计值及其方差阵进行高斯变换,得变换后的模糊度估,将对主组双差模糊度按式(16)确定的置信空
间中的所有组合作为备选整周模糊度解集。
tips:感谢大家的阅读,本文由我司收集整编。
仅供参阅!。
附有约束条件的整周模糊度解算
附有约束条件的整周模糊度解算以《附有约束条件的整周模糊度解算》为标题,写一篇3000字的中文文章伴随时代的发展,计算机技术凭借其快速、高效的特性,变得越来越重要。
在国外,有一种叫做“整周模糊度解算”的技术,受到了广泛的重视和好评。
它是一种基于约束条件的模糊度解算技术,即利用模糊度原理,在实际解算中对节点变量加入约束条件,有效地把一个难以解算的问题转换为可以解决的问题,从而节省解算时间。
整周模糊度解算的核心思想是:整周模糊度解算通过给出节点变量的偏移量,从而限定变量的取值范围,从而有效地减少解算的复杂度。
有效减少复杂度的原因是,给出的节点变量的偏移量可以把一个解算问题分解成若干较小的子问题,这些子问题可以并行处理,从而大大缩短解算时间。
因此,整周模糊度解算具有解算快速、模糊性强等优点。
整周模糊度解算可以用于各种科学计算和工程模拟的计算,如数值分析、生物医学模拟等,其可以有效地提高计算精度,推进计算机技术的发展。
例如,整周模糊度解算可以用于量子力学计算,可有效地解决量子力学问题,比如量子力学模拟中各种复杂原子、分子及它们之间的相互作用等,从而提高预测和理解这些复杂现象的能力。
此外,整周模糊度解算还可以用于电子设备和系统研发,可以有效把系统的设计问题转换为可解算的问题,从而大大提升了系统的可靠性和性能。
另外,整周模糊度解算还可以用于复杂的服务器系统,如分布式计算系统、大数据处理系统和云计算系统等,可以有效地解决这些系统存在的性能瓶颈和可靠性问题,从而进一步提高计算机技术的水平。
总之,附有约束条件的整周模糊度解算技术极大地促进了计算机技术的发展,它为科技发展带来了新的成果,受到了众多科学研究者和工程师的重视和好评。
它可用于各种种类的科学计算和工程模拟的计算,可以有效地提高计算精度,推进计算机技术的发展。
它也可以用于电子设备和系统研发,从而有效地提升系统的可靠性和性能,也可以用于复杂的服务器系统,以解决计算机技术中存在的性能瓶颈和可靠性问题。
北斗导航系统的整周模糊度解算及周跳探测
北斗导航系统的整周模糊度解算及周跳探测焦卫东;毕力格巴特【摘要】影响北斗卫星导航系统(BDS,BeiDou navigation satellite system)观测数据质量的重要指标包括整周模糊度的确定、周跳探测与修正.首先,从码伪距观测方程和载波相位观测方程出发,研究BDS整周模糊度解算方法.其次,利用电离层残差量作为探测周跳的手段,通过仿真实验分析该方法的可行性.实验表明:当周跳小于8周时,用电离层残差探测周跳比较适合;若周跳大于8周,需选用其它方法.%Confirmation of integer ambiguity and the detection and correction of cycle slip are important quality indices of BDS observed data.Firstly,based on the code pseudorange observation equation and carrier phase observation equation,BDS integer ambiguity resolution method is studied.Secondly,the ionospheric residual method is used to detect cycle slips,and its feasibility for BDS is analyzed by simulation.Results show that it is more suitable to detect cycle slips with ionospheric residuals when the cycle slip is less than 8 weeks;if the cycle is longer than 8 weeks,other methods should be used to detect cycel slip.【期刊名称】《中国民航大学学报》【年(卷),期】2018(036)001【总页数】5页(P1-5)【关键词】观测数据质量;整周模糊度;周跳;电离层残差量【作者】焦卫东;毕力格巴特【作者单位】中国民航大学天津市智能信号和图像处理重点实验室,天津300300;中国民航大学天津市智能信号和图像处理重点实验室,天津300300【正文语种】中文【中图分类】V249;TP391.9北斗卫星导航系统(BDS)是中国自主建设、独立运行、与世界其它卫星导航系统兼容共用的全球卫星导航系统,可在全球范围内全天候、全天时,为各类用户提供高精度、高可靠度的定位、导航、授时服务。
GPS姿态测量中的整周模糊度的实时解算方法
iv siaetev l i n ep roma c fh e ag r h tr u hsmuain . n et t ai t a dt efr n eo en w lo i m o g i lt s g h dy h t t h o
K e o ds GP ; I tg r yw r : S ne e Ambg i s lt n GP t u eDee iain iut Re ou i ; y o SAttd tr n t i m o
中图分类 号 :P 2 . 28 4 文献标 识码 :A
Re lTi eI tg r m b g t s lto g rt m o Atiu eD eem i ai n a— m n e e A iui Re ou inAl o i y h f rGPS tt d tr n to
摘 要: P G S实时姿 态测量的核心问题是整周模糊度解算。本文提 出了一种适合实时姿态测 量的模糊度解算方法,它利用单差平滑伪距进行解算,与传统的模糊度解算方法相 比具有许多优
点 。该 方 法的有 效性 和 实用性 通过 仿真 实验 进行 了验证 。 关键 词 :GP ;整 周模 糊度 ;GP S S姿 态 测量
21 0 0年 l 第 62
G S姿 态测 量 中的整 周模糊度 的实时解算方法 P
彭晓刚 ,杨靖 宝 2 一 ,吝宁 2
( 1解 放 军 信 息 工程 大学 测 绘 学 院,郑 州 4 0 5 ; 2 解 放 军 9 4 4部 队 , 皇 岛 0 6 0 ) 502 10 秦 6 0 0
基 于GP 的姿 态 测 量 是 通 过 干涉 测 量 和 载 波 S
相 位测 量技 术实现 。虽然 载波 相位 测量 能够 得到 高
一种GPS整周模糊度的解算方法
一种GPS整周模糊度的解算方法
林雪原;田淑荣;陈玉林
【期刊名称】《海军航空工程学院学报》
【年(卷),期】2008(023)001
【摘要】初始整周模糊度的求解是利用GPS载波相位进行测量的关键问题,文中提出了一种GPS整周模糊度快速解算方法.该方法:首先,对双差观测方程中指向卫星的方向阵进行QR分解;然后,通过比较估计出的基线长度和真实的基线长度建立起整周模糊度初始搜索范围;最后,综合利用快速剔除不合理模糊度解的检验方法以得到最终的模糊度解.文中对所提出的算法进行了理论推导,并进行了基于实测数据的实验与分析.实验结果表明,该算法计算量小,快速准确,适合整周模糊度的快速动态求解.
【总页数】5页(P5-8,12)
【作者】林雪原;田淑荣;陈玉林
【作者单位】海军航空工程学院,电子信息工程系,山东,烟台,264001;海军航空工程学院,基础部,山东,烟台,264001;海军航空工程学院,训练部,山东,烟台,264001【正文语种】中文
【中图分类】U666.11;V249;TP273
【相关文献】
1.一种改进型的GPS单频整周模糊度快速解算方法 [J], 庞春雷;赵修斌;卢艳娥;余永林;严玉国
2.单频GPS动态定位中整周模糊度的一种快速解算方法 [J], 刘宁;熊永良;冯威;徐韶光
3.一种GPS网络RTK整周模糊度解算方法 [J], 潘树国;王庆;柯福阳;邓健
4.一种单频单历元BDS/GPS组合整周模糊度解算方法 [J], 金星;王玲;黄文德;周帮;刘伟
5.一种单频单历元GPS整周模糊度的解算方法 [J], 吴万清;宁龙梅;朱才连
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GPS精密定位周跳检测与修复(Cycle slip detection and repair)完整的载波相位是由初始整周模糊度N、计数器记录的整周数INT和接收机基频信号与收到到卫星信号的小于一周部分相位差Δφ。
Δφ能以极高的精度测定,但这只有在N和INT都正确无误地确定情况下才有意义。
卫星在观测中失锁后,造成接收机载波整周计数INT误差,这种现象称为周跳。
当重新捕获卫星后,周跳给计数器造成的偏差即为中断期间丢失的整周数,小周跳可以通过检测方法发现后并加以修复,大的周跳或较长时间的失锁,周跳不易修复,需要重新固定整周模糊度。
周跳的探测及修复对于用载波相位精密定位至关重要,成功的修复才能获得高精度的结果。
周跳产生的原因:1.卫星信号暂时阻断;2.仪器线路暂时故障;3.外界环境的突变干扰,如电离层、动态变化。
检测周跳的主要方法:1.屏幕扫描法观测值中出现周跳后。
相位观测值的变化率就不再连续。
凡曲线出现不规则的突然变化时,就意味着在相应的相位观测值中出现了整周跳变。
早期进行GPS相位测量的数据处理时,就是靠作业人员坐在计算机屏幕前依次对每个站、每个时段、每个卫星的相位观测值的变化率的图像进行逐段检查来探测周跳,然后再加以修复。
这种方法比较直观,在早期曾广泛使用。
但由于工作繁琐枯燥乏味,而且需反复进行,所以这种手工编辑方法目前正逐步被淘汰,而很少使用了。
2.高次差或多项式拟合法由于卫星和接收机间的距离在不断变化,因而载波相位测量的观测值INT+Δφ也随时间在不断变化。
但这种变化应是有规律的、平滑的。
周跳将破坏这种规律性。
根据这一特性就能将一些大的周跳寻找出来(尤其是对采样率较高的数据)。
一般来说,一个测站S对同一卫星J的相位观测量,对不同历元间相位观测值取至4至5次差之后,距离变化对整周数的影响已可忽略,这时的差值主要是由于振荡器的随机误差而引起的,因而应具有随机的特性见下表。
但是,如果在观测过程中产生了周跳现象,那么便破坏了上述相位观测量的正常变化规率,从而使其高次差的随机特性也受到破坏。
我们利用上述性质便可以发现周跳现象。
下面以观测量为例,如果在历元t5的观测值中有100周的周跳,则观测量的各阶差值中4次差的异常与历元t5观测值的周跳是相应的。
某一历元的周跳发现后,可根据该历元前或后的正确观测值,利用高次差值公式外载波相位观测量及差值推?该历元的正确整周计数或者根据相邻的几个正确的相位观测量,采用n阶多项式拟合(曲线拟合)的方法来推求上述整周计数的正确值,与观测值比较,发现周跳。
由于四次差或五次差一般已呈偶然误差特性,无法再用函数来加以拟合。
所以用多项式拟合时通常也只需取至4~5项即可。
这种方法实质上和上面介绍的高次差法是相同的,只是采用这种形式较便于计算。
由于接收机振荡器的随机误差可能造成载波相位2周左右的误差,所以这一方法通常只能发现较大的周跳(例如>5周),而对于较小周跳的分析方法可参阅其它方法。
含有周跳观测值和差值3.卫星间求差第一种方法由于受到接收机振荡器的随机误差的影响,难以解决小周跳的问题,于是人们自然想到了在卫星间求差的方法。
在GPS测量中,每一瞬间要对多颗卫星进行观测,因而在每颗卫星的载波相位测量观测值中,所受到的接收机振荡器的随机误差的影响是相同的。
在卫星间求差后即可消除此项误差(接收机振荡器的随机误差)的影响。
现仍以观测值的高次差分为例来予以说明。
下表中给出了SV6、SV8和SVll三颗卫星的相位观测量观测值的四次差。
其中SV6从第106个观测值起均丢失了一周。
结果使第105、106的四次差差了3周,104、107的四次差各差了1周。
但由于接收机振荡器的噪声水平也达到几周,因而难以发现。
在卫星间求差后由于消除了接收机钟的随机误差的影响,残留下来的值很小,就可能发现小周跳。
这种做法实际上就是对单差相位观测值(在卫星间求差)的高阶差分进行分析比较来发现周跳。
利用这种方法可以发现与卫星有关的周跳,例如某一卫星信号被短暂中断,而其余卫星则在被连续观测,但不一定能发现与接收机有关的周跳,例如由于接收机线路的瞬时故障而使所有卫星均发生周跳。
在这种情况下就可以通过对双差相位观测值(在卫星及接收机间求差)的高阶差分进行分析比较来发现小的周跳。
采用双差观测值还可以进一步消除卫星振荡器的随机误差影响。
发现周跳后即可利用前面的正确观测值及各阶差分进行外插,求出正确的整周记数。
4. 平差后残差分析经过上述处理的观测值中还可能存在一些未被发现的小周跳。
修复后的观测值中也可能引入1~2周的偏差(相当于仍存在周跳)。
用这些观测值来进行平差计算,求得各观测值的残差。
由于载波相位测量的观测精度很高,因而这些残差的数值一般均很小。
有周跳的观测值上则会出现很大的残差。
据此即可发现和改正周跳。
上述过程往往需要反复进行多次,每次都采用新近获得的平差值(基线向量等)和改正了周跳后的观测值来进行,直至残差符合要求为止。
这样就能获得一组无周跳的“干净的”载波相位测量观测值。
由于三差解中消去了整周未知数N 。
,因而常被采用。
探测和修复周跳的方法很多,究竞采用何种方法要据具体情况而定。
如双频观测值利用电离层延迟来寻找和修复周跳也很简便有效。
在开始时可采用较简便精度不高的方法,旨在发现和修复大周跳。
然后再采用精度较高的公式来寻找并修复小周跳,并通过残差来加以检验。
整周模糊度的确定方法准确和快速地解算数周模糊度,无论对于保障相对定位的精度或对于缩短观测时间以提高作业效率来说,都是极其虽要的。
目前解算整周模糊度的方法有多种,如果按解算所需时间的长短来区分,则可分为经典静态相对定位法和快速解算法。
经典静态相对定位法:即将整模糊度作为待定量与其它未知参数在平差计算中一并求解。
如上所述,这时为了提高解的可靠性,所需的观测时间较长。
整周模糊度的快速解算法,主要包括:交换天线法、P 码双频技术、滤波法和模糊函数法,只需几分钟。
一、 伪距法若可观测载波相位,也可进行伪距测量,有)]([t INT N ϕλρλ+-=上式由伪距观测量和载波观测值一并求定模糊度N 。
由于伪距测量的精度较低,根据一个或少数几个伪距观测值还无法求得正确的N ,必须有较多的差值λN 取平均后才有可能获得正确的整波段数。
为了正确解算N ,λN 的均值的精度必须优于λ/2=10cm ,同时采用P 码,SPS 用户则不行。
二、 待定参数估计法利用载波相位精密定位,最主要的是正确确定整周模糊度,而设站时间被当成次要问题。
通常采用的方法是把整周模糊度也当作平差计算中的待定参数来加以估计和确定。
根据基线的长度不同一般可采用两种方法。
1. 整数解我们知道整周模糊度从理论上讲应该是一个整数,利用这一特性能提高解的精度。
短基线定位时一般采用这种方法。
其具体步骤如下:(1)根据卫星位置和修复了周跳后的干净的相位观测值进行平差计算,求得基线向量和整周未知数。
由于各种误差的影响,解得的整周未知数往往不是一个整数,我们将其称为实数解。
(2)然后再采用某些方法将其固定为整数,并重新进行平差计算。
在计算中整周未知数采用整周值并视为已知数。
以求得基线向量的最后值。
将实数值固定为整数时通常可采用下列三种方法:①最简单的方法是直接将实数解四舍五入,凑整为最接近的整数。
②从数理统计的观点来检核看看把实数解凑整为整数是否合理。
如果该整数位于置信区间内(实数解N ±3m 的范围内,m 为实数解N 的标准方差,此时的置信水平为99.56%),就认为这种凑整是合理的,整数解巳求出。
否则便认为解算失败,无法固定为整数。
③如果在N ±3m 的范围内有不止一个整数,这时就应将该范国内的所有整数均当作候选值,然后将所有卫星的候选值组成不同的组合一一进行试验。
每次试验时均将整周模糊度当作已知值,平差中能产生最小标准方差的那一组整周模糊度被取作最后解。
2.实数解当基线较长时,误差的相关性将降低,许多误差消除得不够完善。
所以无论是基线向量还是整周模糊度,均无法估计得很准确。
在这种情况下再将整周未知数固定为其一整数往往无实际意义,只是徒然增加工作量而已。
所以通常就将实数解作为最后解。
采用经典方法解算整周模糊度时,为了能正确求得这些参数,往往需要一个小时甚至更长的观测时间,从而影响了GPS定位的作业效率,所以只能在高精度定位的领域中得以应用,而在图根控制、地籍测量、普通工程测量等领域内还不能成为经典测量仪器的真正竞争者。
三、三差法(多普勒法)连续跟踪的所有载波相位测量观测值中均含有相同的整周模糊度N。
因而将相邻两个观测历元的载波相位相减时就将该未知参数消去,从而直接解出坐标参数。
这就是我们所熟悉的多普勒法。
但两个历元之间的载波相位观测值之差(即这两个历元间的积分多普勒值)受到此期间接收机钟及卫星钟的随机误差的影响,而且几何图形强度也较弱,所以精度不太好,往往仅被用来解算未知参数的初始值。
三差法不仅用在观测历元间求差,还用在卫星及接收机间求差,可以消除更多的误差,所以使用得较为广泛。
但在消除整周模糊度这一点上存在着与多普勒法相同的缺陷,获得的结果精度也不够理想。
四、走走停停法(go and stop)静态测量花费较长时间观测实际上就是要准确确定整周模糊度所需的时间。
要提高GPS测量的作业效率,加快定位速度,关键在于如何快速确定整周模糊度。
1986年B.Remondi提出了所谓的“动态”测量法,其基本思想为:既然在保持连续跟踪的所有载波相位观测值中都含有同样的整周模糊度,那么只要首先设法确定这些整周模糊度并在随后的迁站过程中继续保持对卫星的跟踪,当接收机到达新的测站后就不需要再确定整周未知数了。
这样在新点上只需进行2~3分钟的观测便可精确确定基线向量。
采用这种方法时通常将一台接收机设置在巳知点上不动进行连续观测(称为固定接收机),其余接收机(一台或若干台)在确定好整周模糊度后,按预定计划依次迁往各待定点(称为流动接收机),当然在迁站过程中各接收机均要保持对卫星的连续跟踪。
需要说明的是由于各流动接收机均需和固定接收机进行相对定位,所以确定的模糊度实际是流动接收机与固定接收机之间的模糊度之差。
五、两次设站法(往返式重复设站)在短基线的静态定位中之所以要观测一小时或更长的时间,其主要原因是在较长的时间内卫星的几何图形有较大的变化,致使法方程式有较好的状态参数,因而能正确确定整周模糊度和基线矢量。
此外,较长的观测时间段也能大大削弱某些系统误差的影响(如多路径误差的影响等),但对于削弱测量噪声并无多大实际意义,因为载波相位测量噪声仅为l~2mm。
于是人们自然会想到只要有少量观测值分布在较长的观测时间段上就能达到上述目的。
对实际观测资料处理的结果表明,只需要在观测时间段的开始和结束处有几处观测值。