有限元作业
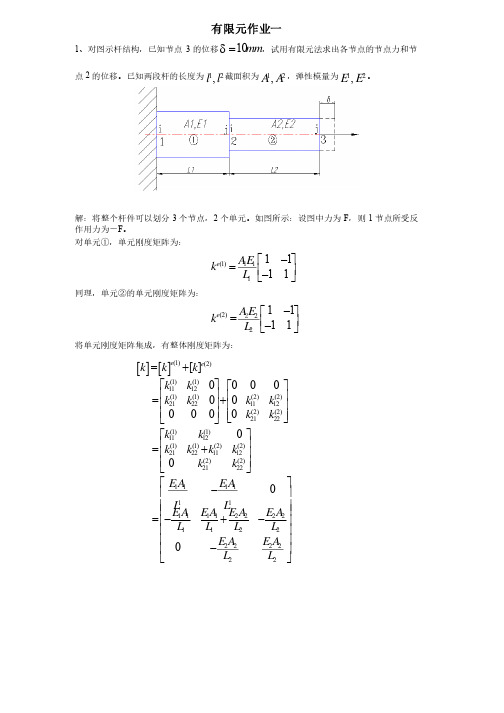
有限元大作业
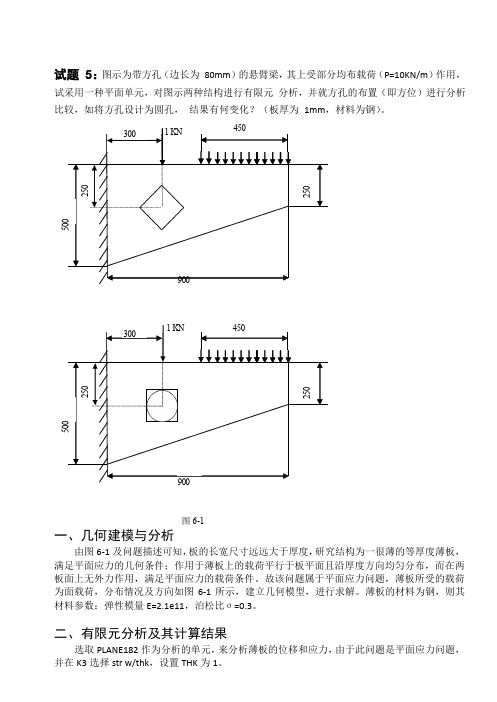
250250试题 5:图示为带方孔(边长为 80mm )的悬臂梁,其上受部分均布载荷(P=10KN/m )作用,试采用一种平面单元,对图示两种结构进行有限元分析,并就方孔的布置(即方位)进行分析比较,如将方孔设计为圆孔,结果有何变化?(板厚为 1mm ,材料为钢)。
3001KN9003001KN图6-1一、几何建模与分析由图6-1及问题描述可知,板的长宽尺寸远远大于厚度,研究结构为一很薄的等厚度薄板,满足平面应力的几何条件;作用于薄板上的载荷平行于板平面且沿厚度方向均匀分布,而在两板面上无外力作用,满足平面应力的载荷条件。
故该问题属于平面应力问题,薄板所受的载荷为面载荷,分布情况及方向如图6-1所示,建立几何模型,进行求解。
薄板的材料为钢,则其材料参数:弹性模量E=2.1e11,泊松比σ=0.3。
二、有限元分析及其计算结果选取PLANE182作为分析的单元,来分析薄板的位移和应力,由于此问题是平面应力问题,并在K3选择str w/thk ,设置THK 为1。
1)方孔竖直制,划分方式采用自由方式,划分后网格的模型如图6-2所示。
计算得到的位移和应力分布如图6-3所示。
图6-2 方孔竖直的网格划分图6-3 位移及应力分布云图2)方孔正直制,划分方式采用自由方式,划分后网格的模型如图6-4所示。
计算得到的位移和应力分布如图6-5所示。
图6-4 方孔正直的网格划分图6-5 位移及应力分布云图3)圆孔按图6-1所示模型进行建模。
并用PLANE182单元进行划分网格,网格大小采用全局网格控制,划分方式采用自由方式,划分后网格的模型如图6-6所示。
计算得到的位移和应力分布如图6-7所示。
图6-4 方孔正直的网格划分图6-5 位移及应力分布云图根据以上的模型分析的位移和应力图,可以得出方孔竖直、方孔正直、圆孔的最大最小位移应力的分布如表6-1所示。
三、比较与分析1)方孔竖直与方孔正直的比较,发现方孔正直的位移变形较小,应力相差不大2)圆孔与方孔比较,发现圆孔的位移变性最小,应力也最小,故可以得出圆孔的布置结构对整体布置的效果最好。
有限元作业—三梁平面框架结构的有限元分析

三梁平面框架结构的有限元分析针对如图1所示的框架结构,其顶端受均布力作用,用有限元方法分析该结构的位移。
结构中各个截面的参数都为:E=3.0 10 Pa,I =6.5 10〃m,2A =6.8 10 m,生成相应的有限元分析模型。
在ANSY平台上,完成相应的力学分析。
416~N nt3000N② ③144mI ------------------------------------------------------------------------------------------ |图1框架结构受一均布力作用ANSYS军答:对该问题进行有限元分析的过程如下。
(1)进入ANSYS设定工作目录和工作文件)程序—An sys —ANSYS In teractive —Worki ng directory (设置工作目录)—Initial jobname(设置工作文件名):beam3 —Run —OK(2)设置计算类型ANSYS Main Menu: Preferences , —Structural —OK(3)选择单元类型ANSYS Main Me nu: Preprocessor —Eleme nt Type —Add/Edit/Delete , —Add, —beam 2node188 —OK (返回到Element Types 窗口)—CloseCross-sectional area:6.8e-4 (梁的横截面积)—OK —Close八 Library of Element Types Library of Element TypesElement type referenc ■亡 number(4)定义材料参数ANSYS Mai n Me nu: Preprocessor — Material Props — Material Models —Structural — Lin ear — Elastic — Isotropic: EX:3e11 ( 弹性模量)—OKANSYS Main Menu: Preprocessor — Real Constants , — Add/Edit/Delete —Add — Type 1 Beam3 — OK — Real Constant Set No: 1 ( 第 1 号实常数),Ry finite 戟『気2 node 1882 node 188Canttl—鼠标点击该窗口右上角的“ ”来关闭该窗口。
现代设计方法(关于有限元)作业
《现代设计方法》作业关于有限元法的研究学院:机械工程学院专业:机械制造及其自动化0.有限元法有限元法分析起源于50年代初杆系结构矩阵的分析。
随后,Clough于1960年第一次提出了“有限元法”的概念。
其基本思想是利用结构离散化的概念,将连续介质体或复杂结构体划分成许多有限大小的子区域的集合体,每一个子区域称为单元(或元素),单元的集合称为网格,实际的连续介质体(或结构体)可以看成是这些单元在它们的节点上相互连接而组成的等效集合体;通过对每个单元力学特性的分析,再将各个单元的特性矩阵组集成可以建立整体结构的力学方程式,即力学计算模型;按照所选用计算程序的要求,输入所需的数据和信息,运用计算机进行求解。
当前,有限元方法/理论已经发展的相当成熟和完善,而计算机技术的不断革新,又在很大程度上推进了有限元法分析在工程技术领域的应用。
然而,如此快速地推广和应用使得人们很容易忽视一个前提,即有限元分析软件提供的计算结果是否可靠、满足使用精度的前提,是合理地使用软件和专业的工程分析。
有限元法分析一般包括四个步骤:物理模型的简化、数学模型的程序化、计算模型的数值化和计算结果的分析。
每一个步骤在操作过程中都或多或少地引入了误差,这些误差的累积最终可能会对计算结果造成灾难性的影响,进而蒙蔽我们的认识和判断。
1.受内压空心圆筒的轴对称有限元分析例图1.1所示为一无限长的受内压的轴对称圆筒,该圆筒置于内径为120mm的刚性圆孔中,试求圆筒内径处的位移。
结构的材料参数为:200=,0.3E GPaμ=。
图1 结构图对该问题进行有限元分析的过程如下。
(1)结构的离散化与编号由于该圆筒为无限长,取出中间一段(20mm高),采用两个三角形轴对称单元,如图1.2所示。
对该系统进行离散,单元编号及结点编号如图1.3所示,有关结点和单元的信息见表1.1。
图1.2 有限元模型图1.3 节点位移编号及单元编号表1.1 单元编号及结点编号单元编号结 点 编 号 ①②1 2 3 2 3 4结构的结点位移列阵为11223344[]T r r r r u w u w u w u w δ= (1.1) 结构的结点外载列阵12[000000]T r r F F F = (1.2)1r F 和2r F 为由内压作用而等效在结点1和结点2上的载荷,其大小为1122240202//502622r r r h p F N F N ππ-⨯⨯⨯==== (1. 3) 约束的支反力矩阵123344[00T z z r z r z R R R R R R R = ] (1.4)其中1z R 和2z R 为结点1和结点2在Z 方向的约束支反力,(3r R ,3z R )和(4r R ,4z R )为结点3和结点4在r 方向和Z 方向的约束支反力。
有限元大作业

1.推导有限元计算格式,理解有限元原理:建立图示受拉直杆在自重(设单位长度重度为q ,截面积为A )和外力P 作用下的拉伸问题的微分方程,并分别利用不同的原理(变分求极值(最小势能或虚功原理)、加权残值法)推导有限元计算格式(取两个单元)。
手工求出端点的位移(自己给定参数值)。
设杆长为L ,截面面积为A(x),弹性模数为E,单位长重量q ,受拉杆x 处的位移为u(x)。
取微元dx 的力平衡,建立受拉杆位移所满足的微分方程()du x dx ε=,()du x E E dxσε== dx 上下截面内力与微元自重相等得()*()()*()A x dx x dx A x x dx qdx σσ++-+=-(()())dA x x q dxσ∴=- (())d duEA x q dx dx=- 0x L << ()0u x = 0x =()duEA x p dx= x L = 得解析解:2()2q x P u Lx x EA EA=-+将其分为两个单元,节点为1,2,3,得22382qL PL u EA EA=+232qL PL u EA EA=+有限元法:1)位移函数01u α= 2111u u l α-=得1211(1)x x u u u l l =-+ 令11(1)x N l =-21x N l = 11122122u u N u N u N N u⎧⎫⎪⎪⎡⎤=+=⎨⎬⎣⎦⎪⎪⎩⎭{}1u N d ⎡⎤=⎣⎦ 2)应变、应力表达{}{}111211du dN d d dx dx l l ε⎡⎤⎡⎤===-⎢⎥⎣⎦⎣⎦{}1B d ε⎡⎤=⎣⎦ {}1E E B d σε⎡⎤==⎣⎦ {}1S d σ⎡⎤=⎣⎦3)势能表示{}{}(){}{}(){}{}{}{}{}1111''112211''121112210111111111111111121221222T V ll T T T T T U W D dV F u F u qdx u u d B E d Adx F u F u ql EA EA ql l l d d d F d EA EA ql l l εε⎡⎤=-=-+-⎣⎦+⎡⎤=-+-⎣⎦⎡⎤⎡⎤-⎢⎥⎢⎥⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦⎢⎥⎣⎦∏⎰⎰⎰4)单元平衡方程 a)最小势能原理110u ∂=∂∏120u ∂=∂∏111111212112112ql F u AE l u ql F ⎧⎫-⎪⎪⎧⎫⎡⎤-⎪⎪⎪⎪=⎨⎬⎨⎬⎢⎥-⎣⎦⎪⎪⎪⎪⎩⎭+⎪⎪⎩⎭b)虚位移原理{}(){}(){}TeTdd F qdx d δδδεσΩ+=Ω⎰⎰{}{}1B d σεδ⎡⎤=⎣⎦ {}1E E B d σεδ⎡⎤==⎣⎦{}(){}{}(){}111111TTT l d F d B E B d Adxδδ⎡⎤=⎣⎦⎰ 由虚位移任意性得,{}{}1111T lF B E B Adxd ⎡⎤=⎣⎦⎰ 积分得111111212112112ql F u AE l u ql F ⎧⎫-⎪⎪⎧⎫⎡⎤-⎪⎪⎪⎪=⎨⎬⎨⎬⎢⎥-⎣⎦⎪⎪⎪⎪⎩⎭+⎪⎪⎩⎭ 记为{}{}111k d F ⎡⎤=⎣⎦ 同理222212323112112ql F u AE l u ql F ⎧⎫-⎪⎪⎧⎫⎡⎤-⎪⎪⎪⎪=⎨⎬⎨⎬⎢⎥-⎣⎦⎪⎪⎪⎪⎩⎭+⎪⎪⎩⎭{}{}222k d F ⎡⎤=⎣⎦ {}{}ei i eF R =∑ 12220F F += 23F P =11111112211223222022202EAEAql F l l u ql ql EA EA EA EA u l l l l u ql EAEA P l l ⎡⎤⎧⎫-⎢⎥+⎪⎪⎢⎥⎧⎫⎪⎪⎢⎥⎪⎪⎪⎪⎢-+-⎥=+⎨⎬⎨⎬⎢⎥⎪⎪⎪⎪⎢⎥⎩⎭⎪⎪+⎢⎥⎪⎪--⎢⎥⎩⎭⎣⎦可得:22382qL PLu EA EA=+232qL PL u EA EA=+与解析解结果一致。
有限元作业整理版
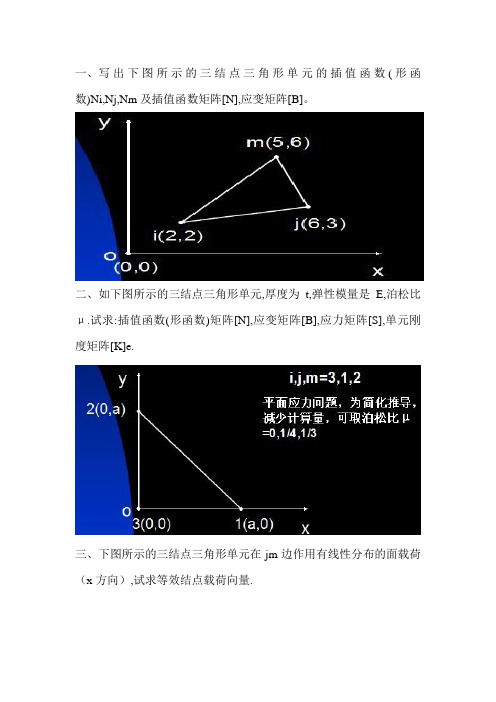
一、写出下图所示的三结点三角形单元的插值函数(形函数)Ni,Nj,Nm及插值函数矩阵[N],应变矩阵[B]。
二、如下图所示的三结点三角形单元,厚度为t,弹性模量是E,泊松比μ.试求:插值函数(形函数)矩阵[N],应变矩阵[B],应力矩阵[S],单元刚度矩阵[K]e.
三、下图所示的三结点三角形单元在jm边作用有线性分布的面载荷(x方向),试求等效结点载荷向量.
四、如下图所示,一正方形平板,厚度为t,边长为a,弹性模量E,泊松比μ.划分为两个三角形单元.求:1,3点的位移.
五、下图所示矩形板,分成四个三结点三角形单元.要求:
(1)写出由单元刚度矩阵组装总体刚度矩阵的表达式;
(2)如1234就是一个矩形单元,试求此单元的单元刚度矩阵.。
有限元分析大作业
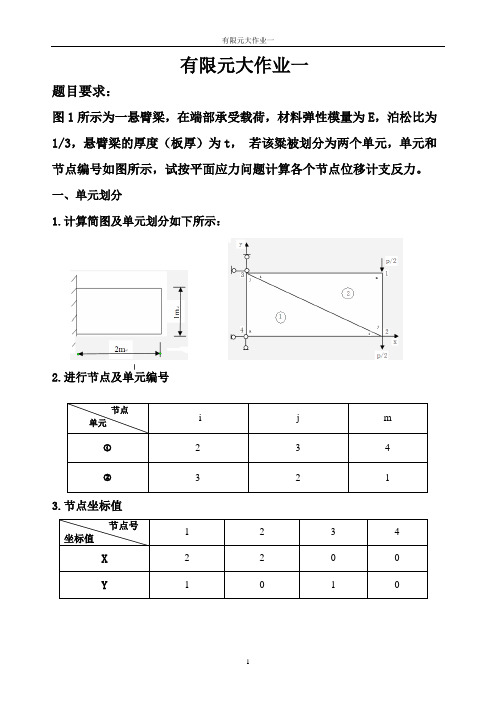
有限元大作业一题目要求:图1所示为一悬臂梁,在端部承受载荷,材料弹性模量为E,泊松比为1/3,悬臂梁的厚度(板厚)为t,若该粱被划分为两个单元,单元和节点编号如图所示,试按平面应力问题计算各个节点位移计支反力。
一、单元划分1.计算简图及单元划分如下所示:2.进行节点及单元编号节点i j m单元① 2 3 4② 3 2 13.节点坐标值节点号1 2 3 4坐标值X 2 2 0 0Y 1 0 1 0二、计算单元刚度矩阵1、计算每个单元面积△以及i b ,i c (m j i i ,,=) ①②单元的面积相等,即12121=⨯⨯=∆ 单元①的i b ,i c⎩⎨⎧=--==-=0)(1m j i m j i y x c y y b ⎩⎨⎧=--==-=2)(0i m ji m j x x c y y b ⎩⎨⎧-=--=-=-=2)(1j i mj i m y x c y y b 对平面应力问题,其表达式为[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+-+-+-+∆-=s r s r sr s r s r s r s r s r b b uc c cb u b uc b c u c ub c c u b b u Et Krs 21212121)1(42 然后对单元①求解单元刚度子矩阵2==i r 2==i s []⎥⎦⎤⎢⎣⎡=3/1001329)1(22Et K 2==i r 3==j s []⎥⎦⎤⎢⎣⎡=03/23/20329)1(23Et K2==i r 4==m s []⎥⎦⎤⎢⎣⎡----=3/13/23/21329)1(24Et K 3==j r 3==j s []⎥⎦⎤⎢⎣⎡=4003/4329)1(33Et K 3==j r 2==i s []⎥⎦⎤⎢⎣⎡=03/23/20329)1(32Et K 3==j r 4==m s []⎥⎦⎤⎢⎣⎡----=43/23/23/4329)1(34Et K 4==m r 4==m s []⎥⎦⎤⎢⎣⎡=3/133/43/43/7329)1(44Et K 4==m r 2==i s []⎥⎦⎤⎢⎣⎡----=3/13/23/21329)1(42Et K 4==m r 3==j s []⎥⎦⎤⎢⎣⎡----=43/23/23/4329)1(43Et K由子矩阵[]e rs K 合成单元刚度矩阵[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡----------------=3/133/443/23/13/23/43/73/23/43/2143/24003/23/23/403/43/203/13/203/23/103/213/2001329)1(Et K将单元①的单元刚度矩阵补零升阶变为单元刚度矩阵,其在总体刚度矩阵中的位置为:节点号→单元②的i b ,i c⎩⎨⎧=--=-=-=0)(1m j im j i y x c y y b ⎩⎨⎧-=--==-=2)(0i m ji m j x x c y y b ⎩⎨⎧=--==-=2)(1j i mj i m y x c y y b 然后对单元 求解单元刚度子矩阵:3==i r 3==i s []⎥⎦⎤⎢⎣⎡=3/1001329)2(33Et K 3==i r 2==j s []⎥⎦⎤⎢⎣⎡=03/23/20329)2(32Et K 3==i r 1==m s []⎥⎦⎤⎢⎣⎡----=3/13/23/21329)2(31Et K 1 2 3 412[])1(22K[])1(23K[])1(24K3[])1(32K[])1(33K[])1(34K4[])1(42K[])1(43K[])1(44K2==j r 2==j s []⎥⎦⎤⎢⎣⎡=4003/4329)2(22Et K 2==j r 3==i s []⎥⎦⎤⎢⎣⎡=03/23/20329)2(23Et K 2==j r 1==m s []⎥⎦⎤⎢⎣⎡----=43/23/23/4329)2(21Et K 1==m r 1==m s []⎥⎦⎤⎢⎣⎡=3/133/43/43/7329)2(11Et K 1==m r 3==i s []⎥⎦⎤⎢⎣⎡----=3/13/23/21329)2(13Et K 1==m r 2==j s []⎥⎦⎤⎢⎣⎡----=43/23/23/4329)2(12Et K 由子矩阵[]e rs K 合成单元刚度矩阵[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡----------------=3/133/443/23/13/23/43/73/23/43/2143/24003/23/23/403/43/203/13/203/23/103/213/2001329)2(Et K将单元②的单元刚度矩阵补零升阶变为单元贡献矩阵,其在总体刚度矩阵中的位置为:节点号→1 2 3 41 [])2(11K[])2(12K[])2(13K2 [])2(21K[])2(22K[])2(23K3 [])2(31K [])2(32K [])2(33K 4三、计算总体刚度矩阵总体刚度矩阵是由各单元的贡献矩阵迭加而成)2()1(][][][][K K K K e +==∑四、进行节点约束处理根据节点约束情况,在总刚矩阵中可采用划行划列处理约束的方法,由题目易知,节点3和4的已知水平位移和垂直位移都为零,划去其相对应的行和列,则总刚矩阵由8阶变为4阶,矩阵如下:⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧--=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------2/02/03/13043/203/73/23/443/23/133/43/23/43/43/73292211p p v u v u Et329][Et K =1 2 3 413/133/43/43/743/23/23/4----3/13/23/21----000243/23/23/4----3/13003/73/43/403/13/23/21----33/13/23/21----3/43/403/13003/743/23/23/4----40003/13/23/21----43/23/23/4----3/133/43/43/7化简⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧--=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------Et p Et p v u v u 3/1603/160130122072412213424472211 五、求解线性方程组方法:采用LU 分解法 1.求解矩阵[]U 各元素⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------75/10775/640075/6475/353007/767/27/7502447~7/877/87/7607/87/337/207/767/27/7502447~13012207241221342447⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----353/44900075/6475/353007/767/27/7502447~ 得到的[]U 矩阵如下:[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=353/44900075/6475/353007/767/27/7502447U 2.求解矩阵[]L 各元素⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----13012207241221342447353/44900075/6475/353007/767/27/75024471353/6475/767/20175/27/40017/40001 得到的[]L 矩阵如下:[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------=13012207241221342447L3.进行求解⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧---=⇒⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧--=Et p Et p Et p y Et p Et p Ly 79425/850800225/323/1603/1603/160⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧---=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----⇒=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡Et p Et p Et p v u v u y v u v u U 79425/850800225/323/160353/44900075/6475/353007/7675/27/750244722112211 解得Et p v /422.82-= Et p u /497.12-= Et p v /028.91-= Et p u /897.11=于是求得各节点的位移为:⎩⎨⎧-==Etp v Etp u /028.9/897.111 ⎩⎨⎧-=-=Etp v Etp u /422.8/497.122 ⎩⎨⎧==033v u ⎩⎨⎧==044v u 六、求解相应的支反力(运用静力学的平衡方程进行求解)3号节点和4号节点的支反力如下图所示:。
有限元作业

有限元作业一、名称:平面结构的静力学分析二、问题描述如图所示不规则板,板厚0.5,孔直径为1,倒角半径为0.4。
约束条件:在左边的孔约束全部自由度,载荷施加在右边圆的下半部分,两端施加最小值(50)逐渐均匀变大到底部的最大值(500)。
三、过程:1.选择单元格类型:新建材料类型Main Menu> Preprocessor > Material Props> Material Models> Structural > Linear > Elastic >Isotropic.并设置属性四、建立模型1.运行Main Menu> Preprocessor> Modeling> Create> Areas> Rectangle> By Dimensions分别输入:X1 = 0 X2 = 6 Y1 = -1 Y2 = 1X1 = 4 X2 = 6 Y1 = -1 Y2 = -3(1)在两个矩形的基础上依次建立两个圆形1运行Utility Menu> PlotCtrls> Pan, Zoom, Rotate2单击small dot3运行Utility Menu> WorkPlane> Display Working Plane4运行Utility Menu> WorkPlane> WP Settings点Polar .Grid. Triad5运行Main Menu> Preprocessor> Modeling> Create> Areas> Circle> Solid Circle6输入WP X = 0 WP Y = 07建立半径为1的圆.8同样的方法建立第二个圆(2)进行布尔运算运行Main Menu> Preprocessor> Modeling> Operate> Booleans> Add>Areas(3)倒圆角1.运行Utility Menu> PlotCtrls> Numbering点line numbering.2.运行Utility Menu> WorkPlane> Display Working Plane Main Menu>Preprocessor> Modeling> Create> Lines> Line Fillet选择17 和 8.3.输入半径0.44.运行Utility Menu> Plot> Lines5.运行Utility Menu> PlotCtrls> Pan, Zoom, Rotate点Zoom button.放大该区域6.运行Main Menu> Preprocessor> Modeling> Create> Areas> Arbitrary> ByLines选线4.5和17.运行Utility Menu> Plot> Areas分别建立两个孔1.运行Utility Menu> WorkPlane> Display Working Plane2.运行Main Menu> Preprocessor> Modeling> Create> Areas> Circle> SolidCircle输入WP X = 0WP Y = 03.建立半径为0.4的孔4.运行Utility Menu> WorkPlane> Offset WP to> Global Origin5.运行Main Menu> Preprocessor> Modeling> Create> Areas> Circle> SolidCircle选取点WP X = 0WP Y = 0建立第二个孔6.运行Utility Menu> WorkPlane> Display Working Plane7.运行Utility Menu> Plot> Replot和Utility Menu> Plot> Lines进行布尔运算运行Main Menu> Preprocessor> Modeling> Operate> Booleans> Add> Areas【一】设置材料属性运行Main Menu> Preprocessor> Material Props> Material Models如下图设置【二】定义实常数运行Main Menu> Preprocessor> Real Constants> Add/Edit/Delete输入【三】划分网格1.运行Main Menu> Preprocessor> Meshing> Mesh Tool Set Global Sizecontrol. 输入0.5。
国科大有限元作业1
作业1
1.叙述弹性力学中三维空间问题的平衡方程、几何方程、物理方程、力边界条
件和位移边界条件,并写出矩阵形式的表示式。
2.分别写出平面应力问题和平面应变问题的平衡方程、几何方程、物理方程、
力边界条件和变形协调方程,请以矩阵形式表示。
3.叙述最小势能原理,并写出其数学表示式。
4.试用流程图的形式概括有限单元法的分析过程。
5.用Galerkin加权余量法求解受均布外载荷简支梁的变形。
已知梁的横向位移
满足控制方程
4
4
w
d
EI q
dx
-=,其边界条件为
2
2
0(0)
d w
w x x l
dx
====
和。
有限元作业

Bierenzuode,kanbudong作业1: 有一个等截面两节点二力杆,杆长为L ,截面积为A ,材料弹性模量为E 。
每个节点只考虑一个水平位移,对于图 (a)、(b) 所示的坐标系统和位移插值函数,分别求相应的[B]矩阵和单元刚度矩阵[K]。
解:(a )、212()u x x αα=+,由边界条件确定常数1α、2α:当0x =时,1i u α=;当x l =时,212j u l αα=+,可得2222()1i j x x u x u u l l ⎛⎫=-+ ⎪⎝⎭因每个节点只考虑一个水平位移故以矩阵形式表示的单元位移函数为:{}{}{}2211122222()1u u x x f x u N N u u ll ⎧⎫⎧⎫⎧⎫==-=⎨⎬⎨⎬⎨⎬⎩⎭⎩⎭⎩⎭单元的几何矩阵:[]''122222x x B N N l l ⎡⎤⎡⎤==-⎣⎦⎢⎥⎣⎦{}{}{}12x u E E B u σε⎧⎫=⨯=⎨⎬⎩⎭,即[][]D E = 对于矩形截面梁单元,积分:yzd dA =⎰⎰为单元横截面面积。
梁单元刚度矩阵[]0leT EA K B B dx ⎡⎤⎡⎤⎡⎤⎣⎦⎣⎦⎣⎦=⎰222202222l x x x l EA x ll l dx ⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦-=-⎰44334433EAEA l l EAEA ll --⎡⎤⎢⎥⎢⎥⎣⎦=(b )、212()u x x x αα=+,由边界条件确定常数1α、2α:当2l x =-时,21224i a l a l u =-+;当2l x =时,21224j a l a l u =+可得222222()i j x lx x lxu x u u l l -+=+ 因每个节点只考虑一个水平位移故以矩阵形式表示的单元位移函数为:{}{}{}221112222222()u u x lxx lx f x u N N u u ll ⎧⎫⎧⎫⎧⎫-+===⎨⎬⎨⎬⎨⎬⎩⎭⎩⎭⎩⎭单元的几何矩阵:[]''122244x l x l B N N l l -+⎡⎤⎡⎤==⎣⎦⎢⎥⎣⎦{}{}{}12x u E E B u σε⎧⎫=⨯=⎨⎬⎩⎭,即[][]D E =对于矩形截面梁单元,积分:yzd dA =⎰⎰为单元横截面面积。
有限元作业:三角形单元求解
有限元作业:三角形单元求解-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII《有限元作业》年级2015级学院机电工程学院专业名称班级学号学生姓名2016年05月如下图所示为一受集中力P作用的结构,弹性模量E为常量,泊松比V=1/6,厚度为I=1。
按平面应力问题计算,运用有限元方法,分别采用三角形及四边形单元求解,求节点位移及单元应力(要求三角形单元数量不少于4个,四边形单元不少于2个)图(一)图(二)三角形单元求解图(三)四边形单元求解(1)如图划分三角形单元,工分成四个分别为 ④(2)如图分别进行编号1、2、3、4、5、6,并建立坐标系(3)编程进行求解,得出结果,其中假设力P=2000N调用Triangle2D3Node_Stiffness函数,求出单元刚度矩阵k1 =1.0e+06 *7.2857 -3.0000 -2.1429 0.8571 -5.1429 2.1429 -3.0000 7.2857 2.1429 -5.1429 0.8571 -2.1429 -2.1429 2.1429 2.1429 0 0 -2.14290.8571 -5.1429 0 5.1429 -0.8571 0-5.1429 0.8571 0 -0.8571 5.1429 02.1429 -2.1429 -2.1429 0 0 2.1429k2 =1.0e+06 *5.1429 0 -5.1429 0.8571 0 -0.85710 2.1429 2.1429 -2.1429 -2.1429 0-5.1429 2.1429 7.2857 -3.0000 -2.1429 0.8571 0.8571 -2.1429 -3.0000 7.2857 2.1429 -5.1429 0 -2.1429 -2.1429 2.1429 2.1429 0-0.8571 0 0.8571 -5.1429 0 5.1429k3 =1.0e+06 *2.1429 0 -2.1429 -2.1429 0 2.14290 5.1429 -0.8571 -5.1429 0.8571 0-2.1429 -0.8571 7.2857 3.0000 -5.1429 -2.1429 -2.1429 -5.1429 3.0000 7.2857 -0.8571 -2.1429 0 0.8571 -5.1429 -0.8571 5.1429 02.1429 0 -2.1429 -2.1429 0 2.1429k4 =1.0e+06 *2.1429 0 -2.1429 -2.1429 0 2.14290 5.1429 -0.8571 -5.1429 0.8571 0-2.1429 -0.8571 7.2857 3.0000 -5.1429 -2.1429 -2.1429 -5.1429 3.0000 7.2857 -0.8571 -2.1429 0 0.8571 -5.1429 -0.8571 5.1429 02.1429 0 -2.1429 -2.1429 0 2.1429调用Triangle2D3Node_Assembly函数,求出总体刚度矩阵求出的节点位移U =-0.00040.00080.00050.00100.00070.0023-0.00070.0026调用Triangle2D3Node_Stress函数,求出应力,S1、S2、S3、中求出的分别为Sx,Sy,SxyS1 =1.0e+03 *-4.4086-0.73483.5914S2 =1.0e+03 *4.4086-0.64050.4086S3 =1.0e+03 *1.8907-1.06012.1093S4 =1.0e+03 *-1.89072.10931.8907二、(1)如图划分四边形单元,工分成四个分别为(2)如图分别进行编号1、2、3、4、5、6,并建立坐标系(3)编程进行求解,得出结果,其中假设力P=2000N调用 Quad2D4Node_Stiffness函数,求出单元刚度矩阵调用Quad2D4Node_Assembly函数,求出求出总体刚度矩阵求出节点位移U =0.00120.0017-0.00120.00170.00160.0049-0.00170.0052调用Quad2D4Node_Stress函数,求出单元应力中的的S1、S2、S3分别为Sx,Sy,Sxy应力分量S1 =1.0e+03 *0.0000-0.24782.0000S2 =1.0e+07 *0.68564.1135-1.7137程序附录一、1、三角形单元总程序:E=1e7;NU=1/6;t=1;ID=1;%调用Triangle2D3Node_Stiffness函数,求出单元刚度矩阵k2=Triangle2D3Node_Stiffness(E,NU,t,0,0,1,0,1,1,ID)k3=Triangle2D3Node_Stiffness(E,NU,t,1,1,1,0,2,0,ID)k4=Triangle2D3Node_Stiffness(E,NU,t,2,0,2,1,1,1,ID)%调用Triangle2D3Node_Assembly函数,求出总体刚度矩阵KK = zeros(12,12);KK=Triangle2D3Node_Assembly(KK,k1,1,2,3);KK=Triangle2D3Node_Assembly(KK,k2,2,4,3);KK=Triangle2D3Node_Assembly(KK,k3,3,4,5);KK=Triangle2D3Node_Assembly(KK,k4,5,6,3)% 边界条件的处理及刚度方程求解k=KK(5:12,5:12)p=[0;0;0;0;0;0;0;2000]u=k\p%支反力的计算U=[0;0;0;0;u] %为节点位移P=KK*U%调用Triangle2D3Node_Strain函数,求出应变SN1、SN2、SN3中求出的分别为SNx,SNy,SNxyu1=[U(1);U(2);U(3);U(4);U(5);U(6)];u2=[U(3);U(4);U(7);U(8);U(5);U(6)];u3=[U(5);U(6);U(7);U(8);U(9);U(10)];u4=[U(9);U(10);U(11);U(12);U(5);U(6)];SN1=Triangle2D3Node_Strain(0,1,0,0,1,1,u1)SN2=Triangle2D3Node_Strain(0,0,1,0,1,1,u2)SN3=Triangle2D3Node_Strain(1,1,1,0,2,0,u3)SN4=Triangle2D3Node_Strain(2,0,2,1,1,1,u4)%调用Triangle2D3Node_Stress函数,求出应力,S1、S2、S3、中求出的分别为Sx,Sy,Sxyu1=[U(1);U(2);U(3);U(4);U(5);U(6)];u2=[U(3);U(4);U(7);U(8);U(5);U(6)];u3=[U(5);U(6);U(7);U(8);U(9);U(10)];u4=[U(9);U(10);U(11);U(12);U(5);U(6)];S1=Triangle2D3Node_Stress(E,NU,0,1,0,0,1,1,u1,ID)S2=Triangle2D3Node_Stress(E,NU,0,0,1,0,1,1,u2,ID)S3=Triangle2D3Node_Stress(E,NU,1,1,1,0,2,0,u3,ID)2、求刚度矩阵程序function k=Triangle2D3Node_Stiffness(E,NU,t,xi,yi,xj,yj,xm,ym,ID)%该函数计算单元的刚度矩阵%输入弹性模量E,泊松比NU,厚度t%输入三个节点i、j、m的坐标xi,yi,xj,yj,xm,ym%输入平面问题性质指示参数ID(1为平面应力,2为平面应变)%输出单元刚度矩阵k(6X6)%---------------------------------------------------------------A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammai = xm-xj;gammaj = xi-xm;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);if ID == 1D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];elseif ID == 2D = (E/(1+NU)/(1-2*NU))*[1-NU NU 0 ; NU 1-NU 0 ; 0 0 (1-2*NU)/2]; endk= t*A*B'*D*B;3、求整体刚度矩阵function z = Triangle2D3Node_Assembly(KK,k,i,j,m)%该函数进行单元刚度矩阵的组装%输入单元刚度矩阵k%输入单元的节点编号I、j、m%输出整体刚度矩阵KK%---------------------------------------------------------------DOF(1)=2*i-1;DOF(2)=2*i;DOF(3)=2*j-1;DOF(4)=2*j;DOF(5)=2*m-1;DOF(6)=2*m;for n1=1:6for n2=1:6KK(DOF(n1),DOF(n2))= KK(DOF(n1),DOF(n2))+k(n1,n2);endendz=KK;4、求应变程序function strain=Triangle2D3Node_Strain(xi,yi,xj,yj,xm,ym,u)%该函数计算单元的应变%输入三个节点i、j、m的坐标xi,yi,xj,yj,xm,ym%输入单元的位移列阵u(6X1)%输出单元的应力strain(3X1),由于它为常应变单元,则单元的应变分量为SNx,SNy,SNz%---------------------------------------------------------------A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammai = xm-xj;gammaj = xi-xm;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);strain = B*u;5、求应力程序function stress=Triangle2D3Node_Stress(E,NU,xi,yi,xj,yj,xm,ym,u,ID)%该函数计算单元的应力%输入弹性模量E,泊松比NU,厚度t%输入三个节点i、j、m的坐标xi,yi,xj,yj,xm,ym%输入平面问题性质指示参数ID(1为平面应力,2为平面应变),单元的位移列阵u(6X1)%输出单元的应力stress(3X1),由于它为常应力单元,则单元的应力分量为Sx,Sy,Sxy%---------------------------------------------------------------A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammai = xm-xj;gammaj = xi-xm;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);if ID == 1D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];elseif ID == 2D = (E/(1+NU)/(1-2*NU))*[1-NU NU 0 ; NU 1-NU 0 ; 0 0 (1-2*NU)/2];endstress = D*B*u;二、1、四边形单元总程序:E=1e7;NU=1/6;h=1;ID=1;%调用 Quad2D4Node_Stiffness函数,求出单元刚度矩阵k1= Quad2D4Node_Stiffness(E,NU,h,0,1,0,0,1,0,1,1,ID)k2= Quad2D4Node_Stiffness(E,NU,h,1,0,2,0,2,1,1,1,ID)%调用Quad2D4Node_Assembly函数,求出求出总体刚度矩阵KK=zeros(12,12);KK= Quad2D4Node_Assembly(KK,k1,1,2,3,4);KK= Quad2D4Node_Assembly(KK,k2,3,5,6,4)% 边界条件的处理及刚度方程求解k=KK(5:12,5:12)p=[0;0;0;0;0;0;0;2000]u=k\p%支反力的计算U=[0;0;0;0;u] %为节点位移P=KK*U%调用Quad2D4Node_Stress函数,求出单元应力中的的S1、S2、S3分别为Sx,Sy,Sxy应力分量u1=[U(1);U(2);U(3);U(4);U(5);U(6);U(7);U(8)];u2=[U(5);U(6);U(9);U(10);U(11);U(12);U(7);(8)];S1= Quad2D4Node_Stress(E,NU,0,1,0,0,1,0,1,1,u1,ID)S2= Quad2D4Node_Stress(E,NU,1,0,2,0,2,1,1,1,u2,ID)2、求刚度矩阵程序function k= Quad2D4Node_Stiffness(E,NU,h,xi,yi,xj,yj,xm,ym,xp,yp,ID)%该函数计算单元的刚度矩阵%输入弹性模量E,泊松比NU,厚度h%输入4个节点i、j、m、p的坐标xi,yi,xj,yj,xm,ym,xp,yp%输入平面问题性质指示参数ID(1为平面应力,2为平面应变)%输出单元刚度矩阵k(8X8)%---------------------------------------------------------------syms s t;a = (yi*(s-1)+yj*(-1-s)+ym*(1+s)+yp*(1-s))/4;b = (yi*(t-1)+yj*(1-t)+ym*(1+t)+yp*(-1-t))/4;c = (xi*(t-1)+xj*(1-t)+xm*(1+t)+xp*(-1-t))/4;d = (xi*(s-1)+xj*(-1-s)+xm*(1+s)+xp*(1-s))/4;B1 = [a*(t-1)/4-b*(s-1)/4 0 ; 0 c*(s-1)/4-d*(t-1)/4 ;c*(s-1)/4-d*(t-1)/4 a*(t-1)/4-b*(s-1)/4];B2 = [a*(1-t)/4-b*(-1-s)/4 0 ; 0 c*(-1-s)/4-d*(1-t)/4 ;c*(-1-s)/4-d*(1-t)/4 a*(1-t)/4-b*(-1-s)/4];B3 = [a*(t+1)/4-b*(s+1)/4 0 ; 0 c*(s+1)/4-d*(t+1)/4 ;c*(s+1)/4-d*(t+1)/4 a*(t+1)/4-b*(s+1)/4];B4 = [a*(-1-t)/4-b*(1-s)/4 0 ; 0 c*(1-s)/4-d*(-1-t)/4 ;c*(1-s)/4-d*(-1-t)/4 a*(-1-t)/4-b*(1-s)/4];Bfirst = [B1 B2 B3 B4];Jfirst = [0 1-t t-s s-1 ; t-1 0 s+1 -s-t ;s-t -s-1 0 t+1 ; 1-s s+t -t-1 0];J = [xi xj xm xp]*Jfirst*[yi ; yj ; ym ; yp]/8;B = Bfirst/J;if ID == 1D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];elseif ID == 2D = (E/(1+NU)/(1-2*NU))*[1-NU NU 0 ; NU 1-NU 0 ; 0 0 (1-2*NU)/2]; endBD = J*transpose(B)*D*B;r = int(int(BD, t, -1, 1), s, -1, 1);z = h*r;k = double(z);3、求总体刚度矩阵程序function z = Quad2D4Node_Assembly(KK,k,i,j,m,p)%该函数进行单元刚度矩阵的组装%输入单元刚度矩阵k,单元的节点编号i、j、m、p%输出整体刚度矩阵KK%---------------------------------------------------------------DOF(1)=2*i-1;DOF(2)=2*i;DOF(3)=2*j-1;DOF(4)=2*j;DOF(5)=2*m-1;DOF(6)=2*m;DOF(7)=2*p-1;DOF(8)=2*p;for n1=1:8for n2=1:8KK(DOF(n1),DOF(n2))= KK(DOF(n1),DOF(n2))+k(n1,n2);endendz=KK;4、求应力程序function stress= Quad2D4Node_Stress(E,NU,xi,yi,xj,yj,xm,ym,xp,yp,u,ID) %该函数计算单元的应力%输入弹性模量E,泊松比NU,厚度h,%输入4个节点i、j、m、p的坐标xi,yi,xj,yj,xm,ym,xp,yp,%输入平面问题性质指示参数ID(1为平面应力,2为平面应变)%输入单元的位移列阵u(8X1)%输出单元的应力stress(3X1)%由于它为常应力单元,则单元的应力分量为Sx,Sy,Sxy%---------------------------------------------------------------syms s t;a = (yi*(s-1)+yj*(-1-s)+ym*(1+s)+yp*(1-s))/4;b = (yi*(t-1)+yj*(1-t)+ym*(1+t)+yp*(-1-t))/4;c = (xi*(t-1)+xj*(1-t)+xm*(1+t)+xp*(-1-t))/4;d = (xi*(s-1)+xj*(-1-s)+xm*(1+s)+xp*(1-s))/4;B1 = [a*(t-1)/4-b*(s-1)/4 0 ; 0 c*(s-1)/4-d*(t-1)/4 ;c*(s-1)/4-d*(t-1)/4 a*(t-1)/4-b*(s-1)/4];B2 = [a*(1-t)/4-b*(-1-s)/4 0 ; 0 c*(-1-s)/4-d*(1-t)/4 ;c*(-1-s)/4-d*(1-t)/4 a*(1-t)/4-b*(-1-s)/4];B3 = [a*(t+1)/4-b*(s+1)/4 0 ; 0 c*(s+1)/4-d*(t+1)/4 ;c*(s+1)/4-d*(t+1)/4 a*(t+1)/4-b*(s+1)/4];B4 = [a*(-1-t)/4-b*(1-s)/4 0 ; 0 c*(1-s)/4-d*(-1-t)/4 ;c*(1-s)/4-d*(-1-t)/4 a*(-1-t)/4-b*(1-s)/4];Bfirst = [B1 B2 B3 B4];Jfirst = [0 1-t t-s s-1 ; t-1 0 s+1 -s-t ;s-t -s-1 0 t+1 ; 1-s s+t -t-1 0];J = [xi xj xm xp]*Jfirst*[yi ; yj ; ym ; yp]/8;B = Bfirst/J;if ID == 1D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];elseif ID == 2D = (E/(1+NU)/(1-2*NU))*[1-NU NU 0 ; NU 1-NU 0 ; 0 0 (1-2*NU)/2]; endstr1 = D*B*u;str2 = subs(str1, {s,t}, {0,0});stress = double(str2);。
有限元大作业
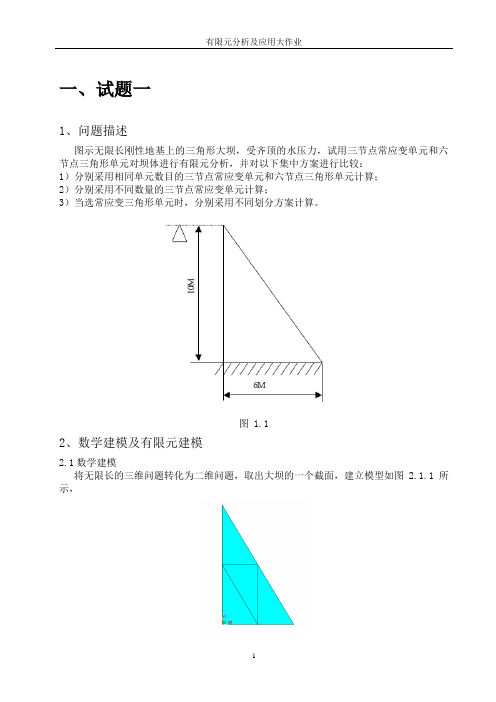
一、试题一1、问题描述图示无限长刚性地基上的三角形大坝,受齐顶的水压力,试用三节点常应变单元和六节点三角形单元对坝体进行有限元分析,并对以下集中方案进行比较:1)分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算;2)分别采用不同数量的三节点常应变单元计算;3)当选常应变三角形单元时,分别采用不同划分方案计算。
图 1.12、数学建模及有限元建模2.1数学建模将无限长的三维问题转化为二维问题,取出大坝的一个截面,建立模型如图2.1.1所示,图 2.1.12.2单元选择分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算,分别采用不同数量的三节点常应变单元计算,当选常应变三角形单元时,分别采用不同划分方案计算。
由于是平面应力问题,故Element Behavior K3选择Plane stress。
E=210Gpa,u=0.3。
2.3网格划分按照题意,采用不同数量的三节点常应变单元计算,划分具体的方案见第三部分计算结果。
2.4载荷及边界条件处理边界条件:底端将X,Y方向全约束。
载荷:由于水的压强是随着深度越来越大的P=密度*重力加速度*深度,故对大坝的梯梯形面施加载荷Result = 9800*(10-{Y})3、计算结果及结果分析3.1三节点常应变单元网格划分及结果图 1.3.1.1 图 1.3.1.2图 1.3.1.3 图1.3.1.4 由图可知:DMX=0.143E-4MSMN=49520PASMX=150581PA3.2六节点常应变单元网格划分及结果图1.3.2.1 图 1.3.2.2图 1.3.2.3 图 1.3.2.4由图可知:DMX=0.264E-4MSMN=1893PASMX=306986PA3.3三节点常应变单元网格划分及结果(24个单元)图 1.3.3.1 图 1.3.3.2图 1.3.3.3 图 1.3.3.4由图可知:DMX=0.203E-4MSMN=24617PASMX=199290PA3.4三节点常应变单元网格划分及结果(48个单元)图 1.3.4.1 图 1.3.4.2图 1.3.4.3 图 1.3.4.4由图可知:DMX=0.228E-4MSMN=16409PASMX=243234PA3.5三节点划分方案A图 1.3.5.1 图 1.3.5.2图 1.3.5.3 图 1.3.5.4由图可知:DMX=0.106E-4MSMN=50110PASMX=18194PA3.6三节点划分方案B图 1.3.6.1 图 1.3.6.2图 1.3.6.3 图 1.3.6.44、多方案分析比较4.1相同数目三节点和六节点单元比较DMX(mm) SMN(pa)SMX(pa) 方案数值三节点三角形单元0.143E-4 49520 150581六节点三角形单元0.264E-4 1893 306986表 1.4.1结论:相同的单元划分方案和单元规模,采用不同的阶次的相同形状的单元,分析结果不同。
有限元课程大作业
金属坯料挤压过程有限元分析一、前言:金属挤压是将放在挤压模具内的金属锭坯从一端施加外力,强迫其从特定的模孔中流出,获得所需要的断面形状和尺寸的制品的技术。
冷挤压时由于材料是在冷态下成形,而且变形量一般都很大,挤压过程中作用在模具上的单位压力很大,此时模具有开裂破坏的可能,对压力机也构成威胁,金属坯料在通过模具过程中,坯料与模具之间产生相当大的应力,这就要求模具需要有相当大的强度、硬度、以及耐磨性,因此冷挤压时要进行挤压力的计算。
挤压力的计算是模具设计的重要依据,也是选择挤压设备的依据。
模具角度、接触表面的摩擦系数、坯料变形量都会影响应力变化,在保证加工要求的前提下,应当通过适当方式降低坯料及模具之间的应力。
通过有限元分析,得出应力分布图,分析变形区域、死区,对模具进行优化改进。
二、有限元介绍:ANSYS概述ANSYS软件是融结构、热、流体、电磁、声学于一体的大型通用有限元软件,可广泛地用于核工业、铁道、石油化工、航空航天、机械制造、能源、汽车交通、国防军工、电子、土木工程、生物医学、水利、日用家电等一般工业及科学研究。
该软件提供了不断改进的功能清单,具体包括:结构高度非线性分析、电磁分析、计算流体力学分析、设计优化、接触分析、自适应网格划分及利用ANSYS参数设计语言扩展宏命令功能。
ANSYS软件功能强大,主要特点有:实现多场及多场耦合分析;实现前后处理、求解及多场分析统一数据库的一体化;具有多物理场优化功能;强大的非线性分析功能;多种求解器分别适用于不同的问题及不同的硬件设备;支持异种、异构平台的网络浮动,在异种、异构平台上用户界面统一、数据文件全部兼容;强大的并行计算功能支持分布式并行及共享内存式并行;多种自动网格划分技术;良好的用户开发环境。
ANSYS不仅支持用户直接创建模型,也支持与其他CAD软件进行图形传递,其支持的图形传递有:SAT、Parasolid、STEP。
相应地,可以进行接口的常用CAD 软件有:Unigraphics、Pro/Engineer、I-Deas、Catia、CADDS、SolidEdge、SolidWorks等。
有限元受力分析大作业

1. 定义分析类型
Main Menu >Solution > Analysis Type > New Analysis, 选择Static 2. 定义位移约束
Main Menu >Solution> Define Loads >Apply >Structural>Displacement > On Areas, 在 弹出对话框中选Circle,点击OK后,在弹出的对话框中填入:0
后处理
1. 查看总体变形
Main Menu >General Postproc >Plot Results > Deformed shape
(2)
(2)
四. 加载和求解
1. 定义分析类型
Main Menu >Solution > Analysis Type > New Analysis, 选择Static 2. 定义位移约束
Main Menu >Solution> Define Loads >Apply >Structural>Displacement > On Areas, 在 弹出对话框中选Circle,点击OK后,在弹出的对话框中填入:0
七. 后处理
1. 查看总体变形
Main Menu >General Postproc >Plot Results > Deformed shape
S
作业三:轴承座盈利分析
1、 题目
2、建模
3、ansys前处理
导入
ansys前处理
1、定义单元类型 Main Menu>Proprocessor>Element Type >Add/Edit/Delete 弹出对话框 中后,点“Add” 。双弹出对话框,选“Solid”和“10node 92”,点 “OK”,退回到前一个对话框。
中科大工程中的有限元作业答案(最新)
、最小势能原理法
2
1 1 12 1 2 22 1 3 32 1 1 2 2
P = 2 k d + 2 k d + 2 k d - Fq - F q
2的位移。
d1 , d 2 , d 3分别代表弹簧 (1),
( 2 ),( 3)的伸长量,q1和q2表示节点1,
= êêk21(1) k22(1) 0úú + êê0 k11(2) k12(2) úú
êë 0 0 0úû êë0 k21(2) k22(2) úû
k12(1)
0ù
ék11(1)
ê
(1)
(1)
(2)
= êk21 k22 + k11 k12(2) úú
êë 0
k21(2)
k22(2) úû
EA
é E1A1
ë
û
2
2
sinq cos
-cos q
-sinq cos
q
qù
é cos q
2
2
ê
AE sinq cosq
sin q
-sinq2cosq
-sin q úú
2
K=
ê
L ê -cos q
cos q
sinq cos
-sinq cos
q
qú
2
2
ê-sin cos
sinq cosq
cos q úû
ë q q -sin q
3
Þ RB = ql
8
3
R Bl
ql
, y BR =
= 3EI
8EI
4
3
ql
有限元作业

第一章工程实例描述所分析的是汽车连杆的模型,连杆的厚度是0.5in,模型如下图所示,在小头孔的内侧90。
范围内承受P=1000psi的面载荷作用,利用有限元分析该连杆的受力状态。
连杆的材料属性为杨氏模量E=30X106psi,泊松比为0.3。
图1 连杆的几何模型第二章有限元软件ansys分析2.1 定义单元类型及材料属性图2-1 设置单元类型图2-2 设置单元选项图2-3 设置材料属性2.2 建立二维模型图2-4 连杆二维模型2.3生成2D网格图2-5 2D网格2.4 拖动生成3D网格图2-6 生成3D网格2.5 施加约束、载荷和求解图2-7 施加约束和载荷2.6 浏览分析结果图2-8 变形形状结果图2-9 节点位移结果图2-10 节点的von mises应力MAXIMUM ABSOLUTE VALUES(最大位移)NODE 1036 2092 19 335VALUE 0.43595E-04 0.33341E-04 0.13754E-02 0.13760E-02MINIMUM VALUES(最小应力)NODE 1557 1557 2100 1791 1791 VALUE -16.528 -61.165 -1087.2 0.25937E-06 0.24537E-06 MAXIMUM VALUES(最大应力)NODE 1023 24 1103 2098 2098VALUE 2273.0 222.25 43.989 3192.8 2813.72.7 生成源程序/BATCH/COM,ANSYS RELEASE 11.0SP1 UP2007083009:29:56 06/26/2010 /TITLE,ansys of c-rod/REPLOT/PREP7!*ET,1,MESH200!*KEYOPT,1,1,7 KEYOPT,1,2,0!*ET,2,SOLID95!*!* MPTEMP,,,,,,,, MPTEMP,1,0 MPDATA,EX,1,,30e6 MPDATA,PRXY,1,,0.3 ESIZE,0.2,0, MSHAPE,0,2D MSHKEY,0!*CM,_Y,AREAASEL, , , , 2 CM,_Y1,AREA CHKMSH,'AREA' CMSEL,S,_Y!*AMESH,_Y1!*CMDELE,_Y CMDELE,_Y1 CMDELE,_Y2!*TYPE, 2MAT, 1 REAL,ESYS, 0 SECNUM,!*TYPE, 2EXTOPT,ESIZE,3,0,EXTOPT,ACLEAR,0!*EXTOPT,ATTR,0,0,0MAT,1REAL,_Z4ESYS,0!*!*VOFFST,2,0.5, ,/VIEW,1,1,1,1/ANG,1/REP,FAST/VIEW,1,1,2,3/ANG,1/REP,FAST/VIEW,1,,,1/ANG,1/REP,FASTFINISH/SOL/VIEW,1,1,1,1/ANG,1/REP,FAST/VIEW,1,1,2,3/ANG,1/REP,FAST/VIEW,1,1,2,3/ANG,1/REP,FAST/VIEW,1,,,1/ANG,1/REP,FAST/VIEW,1,1,1,1/ANG,1/REP,FAST/VIEW,1,,,1/ANG,1/REP,FAST/VIEW,1,1,1,1/ANG,1/REP,FASTFLST,2,4,5,ORDE,2FITEM,2,27FITEM,2,-30DA,P51X,SYMM!*/PSF,DEFA, ,2,0,1/PBF,DEFA, ,1/PIC,DEFA, ,1/PSYMB,CS,0/PSYMB,NDIR,0/PSYMB,ESYS,0/PSYMB,LDIV,0/PSYMB,LDIR,0/PSYMB,ADIR,0/PSYMB,ECON,0/PSYMB,XNODE,0/PSYMB,DOT,1/PSYMB,PCONV,/PSYMB,LAYR,0/PSYMB,FBCS,0!*/PBC,ALL, ,1/REP!*/VIEW,1,1,1,1/ANG,1/REP,FAST/VIEW,1,1,2,3/ANG,1/REP,FASTFLST,2,4,5,ORDE,2FITEM,2,31FITEM,2,-34/GO!*SFA,P51X,1,PRES,1000EQSLV,PCG,1E-8/STATUS,SOLU SOLVE FINISH/POST1 PLDISP,1/VIEW,1,1,2,3 /ANG,1/REP,FAST/VIEW,1,1,1,1 /ANG,1/REP,FAST/VIEW,1,,,1/ANG,1/REP,FAST/VIEW,1,1,2,3 /ANG,1/REP,FAST/VIEW,1,1,1,1 /ANG,1/REP,FAST/VIEW,1,1,2,3 /ANG,1/REP,FAST/VIEW,1,1,2,3 /ANG,1/REP,FAST/VIEW,1,1,1,1 /ANG,1/REP,FAST/VIEW,1,1,2,3 /ANG,1/REP,FAST/VIEW,1,1,2,3 /ANG,1/REP,FAST/VIEW,1,1,1,1 /ANG,1/REP,FAST/VIEW,1,1,2,3 /ANG,1/REP,FAST/VIEW,1,,,1/ANG,1/REP,FAST /VIEW,1,1/ANG,1/REP,FAST/VIEW,1,,1/ANG,1/REP,FAST/VIEW,1,,,-1/ANG,1/REP,FAST/VIEW,1,-1/ANG,1/REP,FAST/VIEW,1,,-1/ANG,1/REP,FAST/VIEW,1,1,1,1/ANG,1/REP,FAST/VIEW,1,1,2,3/ANG,1/REP,FAST/ZOOM,1,BACK/ANG,1,30,XS,1/REP,FAST/ANG,1,-30,XS,1/REP,FAST/ANG,1,-30,XS,1/REP,FAST/ANG,1,30,XS,1/REP,FAST/ANG,1,-30,YS,1/REP,FAST/ANG,1,30,YS,1/REP,FAST/VIEW,1,1,2,3/ANG,1/REP,FAST/VIEW,1,1,1,1/ANG,1/REP,FAST/VIEW,1,1,2,3/ANG,1/REP,FAST!*/EFACET,1PLNSOL, U,SUM, 0,1.0!*/EFACET,1PLNSOL, U,SUM, 1,1.0!*/EFACET,1PLNSOL, S,EQV, 1,1.0!*PRNSOL,S,PRIN!*PRNSOL,U,COMPFINISH! /EXIT,AL参考文献[1] 邓凡平. ANSYS 10.0有限元分析自学手册. 北京:人民邮电出版社,2007[2] 博弈创作室. ANSYS 9.0经典产品高级分析技术与实例详解. 北京:中国水利水电出版社,2005[3] 李又村,程赫明,周友坤. 仿真在薄板小孔应力集中现象实验中的应用. 昆明冶金高等专科学校学报,2008,(1)[4] 张洪信,赵清海.ansys有限元分析完全自学手册.机械工业出版社,2008。
有限元分析题及大作业题答案
有限元分析及应用作业报告试题10一、问题描述确定图示扳手中的应力, E=210Gpa,μ=0.3, 假设厚度为10mm;并讨论采用何种处理可降低最大应力或改善应力分布。
图1为扳手的基本形状和基本尺寸图二、数学建模与分析由图1及问题描述可知,板手的长宽尺寸远远大于厚度,研究结构为一很薄的等厚度薄板,满足平面应力的几何条件;作用于薄板上的载荷平行于板平面且作用在沿厚度方向均匀分布在办手柄的左边缘线,而在两板面上无外力作用,满足平面应力的载荷条件。
故该问题属于平面应力问题,薄板所受的载荷为面载荷,分布情况及方向如图1所示,建立几何模型,并进行求解。
薄板的材料为钢,则其材料参数:弹性模量E=2.1e11,泊松比σ=0.3三、有限元建模1、单元选择:选取三节点常应变单元来计算分析薄板扳手的位移和应力。
由于此问题为平面应力问题,:三节点常应变单元选择的类型是PLANE42(Quad 4node42),该单元属于是四节点单元类型,在网格划分时可以对节点数目控制使其蜕化为三节点单元。
2、定义材料参数:ANSYS Main Menu: Preprocessor →Material Props →Material Models →Structural →Linear →Elastic →Isotropic →input EX:2.1e11, PRXY:0.3 →OK3、生成几何模型:a.创建关键点点:ANSYS Main Menu: Preprocessor →Modeling →Create →Keypoints →In Active CS →依次输入16个点的坐标→OKb、将这16个关键点有直线依次连起来,成为线性模型4、生成实体模型:ANSYS Main Menu: Preprocessor →Modeling →Create →Areas →Arbitrary →Through KPS →连接特征点→生成两个area→Operate→Subtract→拾取整个扳手区域→OK→生成扳手模型5、结点布置及规模6、网格划分方案ANSYS Main Menu: Preprocessor →Meshing →Mesh Tool →Mesh: Areas, Shape: Tri,Free →Mesh →Pick All (in Picking Menu) →Close( the Mesh Tool window)7、载荷及边界条件处理8、求解控制A、模型施加约束给模型施加x方向约束ANSYS Main Menu: Solution →Define Loads →Apply →Structural →Displacement →On Lines →拾取模型左部的竖直边→OKB、给模型施加载荷ANSYS Main Menu: Solution →Define Loads →Apply →Structural →force→on keypoints→拾取上面左端关键点→700N/mm→okC、分析计算:ANSYS Main Menu: Solution →Solve →Current LS →OK(to close the solve Current Load Step window) →OK6)结果显示:ANSYS Main Menu: General Postproc →Plot Results →Deformed Shape… →select Def + Undeformed →OK (back to Plot Results window) →Contour Plot →Nodal Solu →select: DOF solution →displacement vector sum,von mises stress→OK四、计算结果及结果分析1、三节点常应变单元1)三节点单元的网格划分图2 常应变三节点单元的网格划分平面图图3 常应变三节点单元的网格划分立体图2)三节点单元的约束受载情况图4 常应变三节点单元的约束受载图3)三节点单元的位移分析图5 常应变三节点单元的位移分布图4)三节点单元的应力分析图6 常应变三节点单元的应力分布图2、六节点三角形单元1)六节点三角形单元网格划分图7 六节点三角形单元网格划分图2)六节点三角形单元约束和受载情况分析图8 六节点三角形单元约束受载图3)六节点三角形单元位移分析图9 六节点三角形单元的变形分布图4) 六节点三角形单元的应力分析图9 六节点三角形单元的应力分布图图10 六节点三角形单元的局部应力分布图根据以上位移和应力图,可以得出常应变三节点单元和六节点三角形单元的最小最大位移应力如表1-1所示。
有限元作业:三角形单元求解
《有限元作业》年级2015级学院机电工程学院专业名称班级学号学生2016年05月如下图所示为一受集中力P作用的结构,弹性模量E为常量,泊松比V=1/6,厚度为I=1。
按平面应力问题计算,运用有限元方法,分别采用三角形及四边形单元求解,求节点位移及单元应力(要求三角形单元数量不少于4个,四边形单元不少于2个)图(一)图(二)三角形单元求解图(三)四边形单元求解(1)如图划分三角形单元,工分成四个分别为④(2)如图分别进行编号1、2、3、4、5、6,并建立坐标系(3)编程进行求解,得出结果,其中假设力P=2000N调用Triangle2D3Node_Stiffness函数,求出单元刚度矩阵k1 =1.0e+06 *7.2857 -3.0000 -2.1429 0.8571 -5.1429 2.1429-3.0000 7.2857 2.1429 -5.1429 0.8571 -2.1429 -2.1429 2.1429 2.1429 0 0 -2.14290.8571 -5.1429 0 5.1429 -0.8571 0-5.1429 0.8571 0 -0.8571 5.1429 02.1429 -2.1429 -2.1429 0 0 2.1429k2 =1.0e+06 *5.1429 0 -5.1429 0.8571 0 -0.85710 2.1429 2.1429 -2.1429 -2.1429 0-5.1429 2.1429 7.2857 -3.0000 -2.1429 0.85710.8571 -2.1429 -3.0000 7.2857 2.1429 -5.14290 -2.1429 -2.1429 2.1429 2.1429 0-0.8571 0 0.8571 -5.1429 0 5.1429 k3 =1.0e+06 *2.1429 0 -2.1429 -2.1429 0 2.14290 5.1429 -0.8571 -5.1429 0.8571 0-2.1429 -0.8571 7.2857 3.0000 -5.1429 -2.1429 -2.1429 -5.1429 3.0000 7.2857 -0.8571 -2.14290 0.8571 -5.1429 -0.8571 5.1429 02.1429 0 -2.1429 -2.1429 0 2.1429 k4 =1.0e+06 *2.1429 0 -2.1429 -2.1429 0 2.14290 5.1429 -0.8571 -5.1429 0.8571 0-2.1429 -0.8571 7.2857 3.0000 -5.1429 -2.1429 -2.1429 -5.1429 3.0000 7.2857 -0.8571 -2.14290 0.8571 -5.1429 -0.8571 5.1429 02.1429 0 -2.1429 -2.1429 0 2.1429 调用Triangle2D3Node_Assembly函数,求出总体刚度矩阵求出的节点位移U =-0.00040.00080.00050.00100.00070.0023-0.00070.0026调用Triangle2D3Node_Stress函数,求出应力,S1、S2、S3、中求出的分别为Sx,Sy,SxyS1 =1.0e+03 *-4.4086-0.73483.5914S2 =1.0e+03 *4.4086-0.64050.4086S3 =1.0e+03 *1.8907-1.06012.1093S4 =1.0e+03 *-1.89072.10931.8907二、(1)如图划分四边形单元,工分成四个分别为(2)如图分别进行编号1、2、3、4、5、6,并建立坐标系(3)编程进行求解,得出结果,其中假设力P=2000N调用Quad2D4Node_Stiffness函数,求出单元刚度矩阵调用Quad2D4Node_Assembly函数,求出求出总体刚度矩阵求出节点位移U =0.00120.0017-0.00120.00170.00160.0049-0.00170.0052调用Quad2D4Node_Stress函数,求出单元应力中的的S1、S2、S3分别为Sx,Sy,Sxy应力分量S1 =1.0e+03 *0.0000-0.24782.0000S2 =1.0e+07 *0.68564.1135-1.7137程序附录一、1、三角形单元总程序:E=1e7;NU=1/6;t=1;ID=1;%调用Triangle2D3Node_Stiffness函数,求出单元刚度矩阵k1=Triangle2D3Node_Stiffness(E,NU,t,0,1,0,0,1,1,ID)k2=Triangle2D3Node_Stiffness(E,NU,t,0,0,1,0,1,1,ID)k3=Triangle2D3Node_Stiffness(E,NU,t,1,1,1,0,2,0,ID)k4=Triangle2D3Node_Stiffness(E,NU,t,2,0,2,1,1,1,ID)%调用Triangle2D3Node_Assembly函数,求出总体刚度矩阵KK = zeros(12,12);KK=Triangle2D3Node_Assembly(KK,k1,1,2,3);KK=Triangle2D3Node_Assembly(KK,k2,2,4,3);KK=Triangle2D3Node_Assembly(KK,k3,3,4,5);KK=Triangle2D3Node_Assembly(KK,k4,5,6,3)% 边界条件的处理及刚度方程求解k=KK(5:12,5:12)p=[0;0;0;0;0;0;0;2000]u=k\p%支反力的计算U=[0;0;0;0;u] %为节点位移P=KK*U%调用Triangle2D3Node_Strain函数,求出应变SN1、SN2、SN3中求出的分别为SNx,SNy,SNxyu1=[U(1);U(2);U(3);U(4);U(5);U(6)];u2=[U(3);U(4);U(7);U(8);U(5);U(6)];u3=[U(5);U(6);U(7);U(8);U(9);U(10)];u4=[U(9);U(10);U(11);U(12);U(5);U(6)];SN1=Triangle2D3Node_Strain(0,1,0,0,1,1,u1)SN2=Triangle2D3Node_Strain(0,0,1,0,1,1,u2)SN3=Triangle2D3Node_Strain(1,1,1,0,2,0,u3)SN4=Triangle2D3Node_Strain(2,0,2,1,1,1,u4)%调用Triangle2D3Node_Stress函数,求出应力,S1、S2、S3、中求出的分别为Sx,Sy,Sxyu1=[U(1);U(2);U(3);U(4);U(5);U(6)];u2=[U(3);U(4);U(7);U(8);U(5);U(6)];u3=[U(5);U(6);U(7);U(8);U(9);U(10)];u4=[U(9);U(10);U(11);U(12);U(5);U(6)];S1=Triangle2D3Node_Stress(E,NU,0,1,0,0,1,1,u1,ID)S2=Triangle2D3Node_Stress(E,NU,0,0,1,0,1,1,u2,ID)S3=Triangle2D3Node_Stress(E,NU,1,1,1,0,2,0,u3,ID)S4=Triangle2D3Node_Stress(E,NU,2,0,2,1,1,1,u4,ID)2、求刚度矩阵程序function k=Triangle2D3Node_Stiffness(E,NU,t,xi,yi,xj,yj,xm,ym,ID)%该函数计算单元的刚度矩阵%输入弹性模量E,泊松比NU,厚度t%输入三个节点i、j、m的坐标xi,yi,xj,yj,xm,ym%输入平面问题性质指示参数ID(1为平面应力,2为平面应变)%输出单元刚度矩阵k(6X6)%---------------------------------------------------------------A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammai = xm-xj;gammaj = xi-xm;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);if ID == 1D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];elseif ID == 2D = (E/(1+NU)/(1-2*NU))*[1-NU NU 0 ; NU 1-NU 0 ; 0 0 (1-2*NU)/2]; endk= t*A*B'*D*B;3、求整体刚度矩阵function z = Triangle2D3Node_Assembly(KK,k,i,j,m)%该函数进行单元刚度矩阵的组装%输入单元刚度矩阵k%输入单元的节点编号I、j、m%输出整体刚度矩阵KK%---------------------------------------------------------------DOF(1)=2*i-1;DOF(2)=2*i;DOF(3)=2*j-1;DOF(4)=2*j;DOF(5)=2*m-1;DOF(6)=2*m;for n1=1:6for n2=1:6KK(DOF(n1),DOF(n2))= KK(DOF(n1),DOF(n2))+k(n1,n2);endendz=KK;4、求应变程序function strain=Triangle2D3Node_Strain(xi,yi,xj,yj,xm,ym,u)%该函数计算单元的应变%输入三个节点i、j、m的坐标xi,yi,xj,yj,xm,ym%输入单元的位移列阵u(6X1)%输出单元的应力strain(3X1),由于它为常应变单元,则单元的应变分量为SNx,SNy,SNz%---------------------------------------------------------------A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammaj = xi-xm;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);strain = B*u;5、求应力程序function stress=Triangle2D3Node_Stress(E,NU,xi,yi,xj,yj,xm,ym,u,ID)%该函数计算单元的应力%输入弹性模量E,泊松比NU,厚度t%输入三个节点i、j、m的坐标xi,yi,xj,yj,xm,ym%输入平面问题性质指示参数ID(1为平面应力,2为平面应变),单元的位移列阵u(6X1)%输出单元的应力stress(3X1),由于它为常应力单元,则单元的应力分量为Sx,Sy,Sxy%---------------------------------------------------------------A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammai = xm-xj;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);if ID == 1D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];elseif ID == 2D = (E/(1+NU)/(1-2*NU))*[1-NU NU 0 ; NU 1-NU 0 ; 0 0 (1-2*NU)/2]; endstress = D*B*u;二、1、四边形单元总程序:E=1e7;NU=1/6;h=1;ID=1;%调用Quad2D4Node_Stiffness函数,求出单元刚度矩阵k1= Quad2D4Node_Stiffness(E,NU,h,0,1,0,0,1,0,1,1,ID)k2= Quad2D4Node_Stiffness(E,NU,h,1,0,2,0,2,1,1,1,ID)%调用Quad2D4Node_Assembly函数,求出求出总体刚度矩阵KK=zeros(12,12);KK= Quad2D4Node_Assembly(KK,k1,1,2,3,4);KK= Quad2D4Node_Assembly(KK,k2,3,5,6,4)% 边界条件的处理及刚度方程求解k=KK(5:12,5:12)p=[0;0;0;0;0;0;0;2000]u=k\p%支反力的计算U=[0;0;0;0;u] %为节点位移P=KK*U%调用Quad2D4Node_Stress函数,求出单元应力中的的S1、S2、S3分别为Sx,Sy,Sxy应力分量u1=[U(1);U(2);U(3);U(4);U(5);U(6);U(7);U(8)];u2=[U(5);U(6);U(9);U(10);U(11);U(12);U(7);(8)];S1= Quad2D4Node_Stress(E,NU,0,1,0,0,1,0,1,1,u1,ID)S2= Quad2D4Node_Stress(E,NU,1,0,2,0,2,1,1,1,u2,ID)2、求刚度矩阵程序function k= Quad2D4Node_Stiffness(E,NU,h,xi,yi,xj,yj,xm,ym,xp,yp,ID) %该函数计算单元的刚度矩阵%输入弹性模量E,泊松比NU,厚度h%输入4个节点i、j、m、p的坐标xi,yi,xj,yj,xm,ym,xp,yp%输入平面问题性质指示参数ID(1为平面应力,2为平面应变)%输出单元刚度矩阵k(8X8)%---------------------------------------------------------------syms s t;a = (yi*(s-1)+yj*(-1-s)+ym*(1+s)+yp*(1-s))/4;b = (yi*(t-1)+yj*(1-t)+ym*(1+t)+yp*(-1-t))/4;c = (xi*(t-1)+xj*(1-t)+xm*(1+t)+xp*(-1-t))/4;d = (xi*(s-1)+xj*(-1-s)+xm*(1+s)+xp*(1-s))/4;B1 = [a*(t-1)/4-b*(s-1)/4 0 ; 0 c*(s-1)/4-d*(t-1)/4 ;c*(s-1)/4-d*(t-1)/4 a*(t-1)/4-b*(s-1)/4];B2 = [a*(1-t)/4-b*(-1-s)/4 0 ; 0 c*(-1-s)/4-d*(1-t)/4 ;c*(-1-s)/4-d*(1-t)/4 a*(1-t)/4-b*(-1-s)/4];B3 = [a*(t+1)/4-b*(s+1)/4 0 ; 0 c*(s+1)/4-d*(t+1)/4 ;c*(s+1)/4-d*(t+1)/4 a*(t+1)/4-b*(s+1)/4];B4 = [a*(-1-t)/4-b*(1-s)/4 0 ; 0 c*(1-s)/4-d*(-1-t)/4 ;c*(1-s)/4-d*(-1-t)/4 a*(-1-t)/4-b*(1-s)/4];Bfirst = [B1 B2 B3 B4];Jfirst = [0 1-t t-s s-1 ; t-1 0 s+1 -s-t ;s-t -s-1 0 t+1 ; 1-s s+t -t-1 0];J = [xi xj xm xp]*Jfirst*[yi ; yj ; ym ; yp]/8;B = Bfirst/J;if ID == 1D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];elseif ID == 2D = (E/(1+NU)/(1-2*NU))*[1-NU NU 0 ; NU 1-NU 0 ; 0 0 (1-2*NU)/2]; endBD = J*transpose(B)*D*B;r = int(int(BD, t, -1, 1), s, -1, 1);z = h*r;k = double(z);3、求总体刚度矩阵程序function z = Quad2D4Node_Assembly(KK,k,i,j,m,p)%该函数进行单元刚度矩阵的组装%输入单元刚度矩阵k,单元的节点编号i、j、m、p%输出整体刚度矩阵KK%---------------------------------------------------------------DOF(1)=2*i-1;DOF(2)=2*i;DOF(3)=2*j-1;DOF(4)=2*j;DOF(5)=2*m-1;DOF(6)=2*m;DOF(7)=2*p-1;DOF(8)=2*p;for n1=1:8for n2=1:8KK(DOF(n1),DOF(n2))= KK(DOF(n1),DOF(n2))+k(n1,n2);endendz=KK;4、求应力程序function stress= Quad2D4Node_Stress(E,NU,xi,yi,xj,yj,xm,ym,xp,yp,u,ID) %该函数计算单元的应力%输入弹性模量E,泊松比NU,厚度h,%输入4个节点i、j、m、p的坐标xi,yi,xj,yj,xm,ym,xp,yp,%输入平面问题性质指示参数ID(1为平面应力,2为平面应变)%输入单元的位移列阵u(8X1)%输出单元的应力stress(3X1)%由于它为常应力单元,则单元的应力分量为Sx,Sy,Sxy%---------------------------------------------------------------syms s t;a = (yi*(s-1)+yj*(-1-s)+ym*(1+s)+yp*(1-s))/4;b = (yi*(t-1)+yj*(1-t)+ym*(1+t)+yp*(-1-t))/4;c = (xi*(t-1)+xj*(1-t)+xm*(1+t)+xp*(-1-t))/4;d = (xi*(s-1)+xj*(-1-s)+xm*(1+s)+xp*(1-s))/4;B1 = [a*(t-1)/4-b*(s-1)/4 0 ; 0 c*(s-1)/4-d*(t-1)/4 ;c*(s-1)/4-d*(t-1)/4 a*(t-1)/4-b*(s-1)/4];B2 = [a*(1-t)/4-b*(-1-s)/4 0 ; 0 c*(-1-s)/4-d*(1-t)/4 ;c*(-1-s)/4-d*(1-t)/4 a*(1-t)/4-b*(-1-s)/4];B3 = [a*(t+1)/4-b*(s+1)/4 0 ; 0 c*(s+1)/4-d*(t+1)/4 ;c*(s+1)/4-d*(t+1)/4 a*(t+1)/4-b*(s+1)/4];B4 = [a*(-1-t)/4-b*(1-s)/4 0 ; 0 c*(1-s)/4-d*(-1-t)/4 ;c*(1-s)/4-d*(-1-t)/4 a*(-1-t)/4-b*(1-s)/4];Bfirst = [B1 B2 B3 B4];Jfirst = [0 1-t t-s s-1 ; t-1 0 s+1 -s-t ;s-t -s-1 0 t+1 ; 1-s s+t -t-1 0];J = [xi xj xm xp]*Jfirst*[yi ; yj ; ym ; yp]/8;B = Bfirst/J;if ID == 1D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];elseif ID == 2D = (E/(1+NU)/(1-2*NU))*[1-NU NU 0 ; NU 1-NU 0 ; 0 0 (1-2*NU)/2]; endstr1 = D*B*u;str2 = subs(str1, {s,t}, {0,0});stress = double(str2);。
有限元大作业
1、某齿轮弯曲应力分析
某直齿圆柱齿轮相关参数为18,模数4.1,压力角22.5°,变位系数为0.36168。
齿轮材料为40Cr ,假设其径向力2364N ,切向力为6400N ,试求其弯曲应力分布情况。
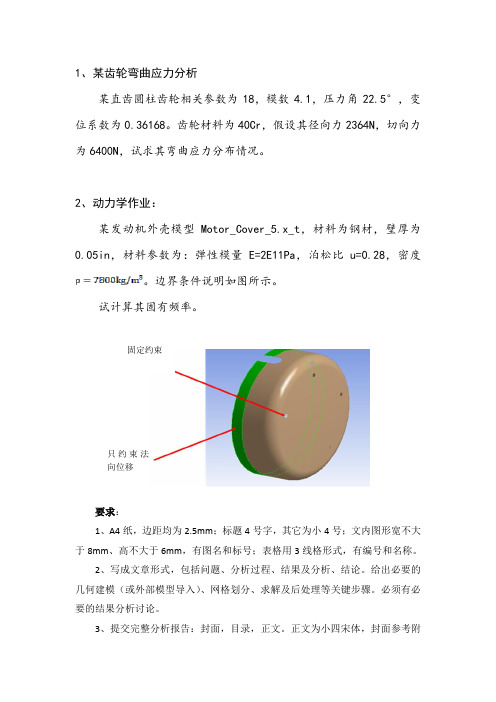
2、动力学作业:
某发动机外壳模型Motor_Cover_5.x_t ,材料为钢材,壁厚为0.05in ,材料参数为:弹性模量E=2E11Pa ,泊松比u=0.28
,密度。
边界条件说明如图所示。
试计算其固有频率。
要求:
1、A4纸,边距均为2.5mm ;标题4号字,其它为小4号;文内图形宽不大于8mm 、高不大于6mm ,有图名和标号;表格用3线格形式,有编号和名称。
2、写成文章形式,包括问题、分析过程、结果及分析、结论。
给出必要的几何建模(或外部模型导入)、网格划分、求解及后处理等关键步骤。
必须有必要的结果分析讨论。
3、提交完整分析报告:封面,目录,正文。
正文为小四宋体,封面参考附只约束法
向位移
固定约束
件。
有限元作业
1 有限元的基础理论有限单元法是20世纪50年代以来随着电子计算机的广泛应用而发展起来的有一种数值解法。
有限元分析(FEA,Finite Element Analysis)的基本概念是用较简单的问题代替复杂问题有限元分析后再求解。
它将求解域看成是由许多称为有限元的小的互连子域组成,对每一单元假定一个合适的(较简单的)近似解,然后推导求解这个域总的满足条件(如结构的平衡条件),从而得到问题的解。
这个解不是准确解,而是近似解,因为实际问题被较简单的问题所代替。
有限元法的基本思路和基本原则以结构力学中的位移法为基础,把复杂的结构或连续体看成有限个单元的组合,各单元彼此在节点处连接而组成整体。
把连续体分成有限个单元和节点,称为离散化。
先对单元进行特性分析,然后根据各节点处的平衡和协调条件建立方程,综合后作整体分析。
这样一分一合,先离散再综合的过程,就是把复杂结构或连续体的计算问题转化为简单单元的分析与综合的问题。
因此,一般的有限元解法包括三个主要步骤:离散化、单元分析、整体分析。
(1)离散化一个复杂的弹性体可以看作由无限个质点组成的连续体。
为了进行解算,可以将此弹性体简化为有限个单元组成的集合体,这些单元只在有限个节点上铰接,因此,这集合体只具有有限个自由度,这就为解算提供了可能。
有无限个质点的连续体转化为有限个单元的集合体,就称为离散化。
(2)单元分析单元分析首先要进行单元划分。
在工程结构中,一般采用四种类型的基本单元,即标量单元、线单元(杆、梁单元)、面单元和体单元。
四种基本单元的若干例子及各单元节点自由度(节点位移)表示在图(1-1)中。
而单元划分一般注意下面几点:一、从有限元本身来看,单元划分的越细,节点布置得越多,计算的结果越精确。
但计算时间和计算费用的增加。
所以在划分单元时对应兼顾这两个方面。
二、在边界比较曲折,应力比较集中,应力变化较大的地方,单元应划分的细点,而在应力变化平缓处单元划分的大些。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
有限元作业答卷一、问题解答1、解:令221()()2()2dy p x q x y f x y dx ⎡⎤⎛⎫=+-⎢⎥ ⎪⎝⎭⎢⎥⎣⎦π则可以得到()()y q x y f x π=-,()y dy p x dx 'π=,()y d d dy p x dx dx dx '⎛⎫π= ⎪⎝⎭又有其Euler 方程公式为:0u u d dx'ππ-= 综上得到原泛函问题的Euler 方程及其边界条件为:()()(),[,](1().1.1),()a b d dy p x q x y f x x a b dx dx y a y y b y ⎧⎪⎨⎛⎫-+=∈ ⎪⎝⎭==⎪⎩2、(1)解:引入Sobolev 空间0V H ()∞=Ω,任取V v ∈乘以方程两端积分: (((,))(,))(,)k x y u q x y u vdxdy f x y vdxdy ΩΩ-∇∙∇+=⎰⎰⎰⎰再利用格林公式得到:((,)(,))(,)(,)uk x y u v q x y uv dxdy k x y vds f x y vdxdy n ΩΓΩ∂∙∇∇+-=∂⎰⎰⎰⎰⎰ 由边界条件得到:(,)((,)(,))(,)(,)g x y k x y u v q x y uv dxdy f x y vdxdy k x y vds nΩΩΓ∂∙∇∇+=+∂⎰⎰⎰⎰⎰ 令 A(,)((,)(,))(,)F()(,)(,)u v k x y u v q x y uv dxdy g x y v f x y vdxdy k x y vdsn ΩΩΓ⎧=∙∇∇+⎪⎪⎨∂⎪=+∂⎪⎩⎰⎰⎰⎰⎰ 得变分方程A(,)F(),(1.2.1)u v v v V=∈其解0u H ()∞∈Ω便为椭圆型方程第一边值问题的Galerkin 意义广义解。
(2)证:下面用Lax-Milgram 定理证明广义解的存在唯一性。
首先,由Hilbert 空间的Schwarz 不等式得到1(,)V f v f v f v v ≤≤∀∈又有1(,)()(,)g x y f v k x y v d s n Γ∂=∂⎰有界 于是11F(v)(,)(,)f v f f v f =+≤+,即F(v)在V 上是有界的。
其次,A (,)((,)(,))u v k x y u v q x y u v d x d y Ω=∙∇∇+⎰⎰中,A(,)u v 对称是显然的。
并且有:12((,)(,))(,)(,)K (,)Q (,)M ,V(),A ,k x y u v q x y uv dxdyk x y u vdxdy q x y uvdxdy u v u v uv u u v v ΩΩΩ∇∇+∇∇+≤∇∇=+≤≤∈⎰⎰⎰⎰⎰⎰说明A (,)u v 在V 上是有界的。
再证A (,)u v 正定,因为对于u V H ()∞∈=Ω, ()()()()222222222221((,)(,))(,)(,)(,)(,)(,)(,)A(,)x y x yk x y u q x y u dxdyk x y u dxdy q x y u dxdy k x y u u dxdy q x y uk x y u u q x y uu u u ΩΩΩΩ∇+=∇+=++=++≤α=⎰⎰⎰⎰⎰⎰⎰⎰根据Lax-Milgram 定理可知变分方程存在唯一解0u H ()∞∈Ω。
它是边值问题的Galerkin 广义解。
3、解:将第一边值条件齐次化,令b a u v x b ab aβ-αα-β=++--得,(,)(1.3.1)()()0d dv b a p q v x f x a b dx dx b a b a v a v b ⎧β-αα-β⎛⎫⎛⎫-+++=∈⎪ ⎪ ⎪--⎝⎭⎝⎭⎨⎪==⎩取广义解空间}{120V H [,],,()()0T a b v v v L v a v b ==∈==,再进行变分求广义解。
任取V v ∈,用它乘以式(1.3.1)中第一式的两边,并在区间I=[a,b]上积分:V bb a a d du b a p q u x vdx fvdx v dx dx b a b a ⎡β-αα-β⎤⎛⎫⎛⎫-+++=∀∈ ⎪ ⎪⎢⎥--⎝⎭⎝⎭⎣⎦⎰⎰对左端分部积分,bb b a a a du du dv b a p v p q u x v dx fvdx dx dx dxb a b a ⎡β-αα-β⎤⎛⎫-++++= ⎪⎢⎥--⎝⎭⎣⎦⎰⎰, 利用()()0v a v b ==,左端第一项为0,带入上式得()()()()V(1.3.2)bb a a b a pu x v x q u x x v x dx fvdx v b a b a ⎡β-αα-β⎤⎛⎫''+++=∀∈ ⎪⎢⎥--⎝⎭⎣⎦⎰⎰如前所述,满足(3.2)式的解V u ∈称为原两点边值问题Galerkin意义的广义解。
引入空间V 上的双线性泛函A(,)()()()()(1.3.3)ba b a u v pu x v x q u x x v x dx b a b a ⎡β-αα-β⎤⎛⎫''=+++ ⎪⎢⎥--⎝⎭⎣⎦⎰和线性泛函()()()(1.3.baF v f x v x d x=⎰于是原问题的Galerkin 广义解V u ∈可以表示为:A(,)(),V(1.3.5)u v F v v =∀∈下面用等距节点线性元推导有限元方程。
从(1.3.3)式可以得出,A(,)u v 不对称,下面采用Galerkin 法建立有限元方程。
可以知道变分方程为(1.3.5)式,求V u ∈使得(1.3.5)式成立。
下面构造V 的有限维子空间V h12V {(),(),...,()}h n span x x x =ϕϕϕ使得子空间V h 的形成按以下步骤进行:1)剖分区间I =[a ,b ] 011......i i n a x x x x x b-=<<<<<<= 由于是等距节点剖分,则有单元长度1()/i i h x x b a n -=-=-,于是()/i x a i b a n =+-,称小区间1e [,]i i i x x -=为单元。
2)线性函数的构造 取1,()0,e 1,2,...,i i i x i x x x hn--⎧∈⎪ϕ=⎨=⎪⎩其它可以得到12V {(),(),...,()}V h n span x x x =ϕϕϕ⊂。
假设在i x 处()u x 的值i u (未知),则在V h 中V u ∈的近似解为:nh i i i 1u (x)u (x)(1.3.6)==ϕ∑从而得到近似变分方程:求()V h h u x ∈使得A(,)(),V (1.3.7)h h u v F v v =∀∈将(1.3.6)带入(1.3.7)并取(x ),1,2,...,j v j n=ϕ=得到: ()()()()()()()()()()()()()n i i j j i 1i j j 11j 12j 2j j 112111222212A u ,F(),j 1,2,...,n A ,F(),j 1,2,...,nA ,A ,...A ,F(),j 1,2,...,nA ,A ,...A ,A ,A ,...A ,............A ,A ,...A ,ni i n n n n n n n n u u u u ==⎛⎫ϕϕ=ϕ= ⎪⎝⎭⇒ϕϕ=ϕ=⇒ϕϕ+ϕϕ++ϕϕ=ϕ=⎡ϕϕϕϕϕϕ⎢ϕϕϕϕϕϕ⎢⇒⎢⎢ϕϕϕϕϕϕ⎣∑∑1122F()F()......F()n n u u u ϕ⎤⎡⎤⎡⎤⎥⎢⎥⎢⎥ϕ⎥⎢⎥⎢⎥=⎥⎢⎥⎢⎥⎥⎢⎥⎢⎥ϕ⎣⎦⎣⎦⎦(1.3.8)Ku F⇒=要求解此方程组,首先需要计算出系数矩阵K 和常数向量F ,而根据12(),(),...,()n x x x ϕϕϕ的结构可知,()i j (),()0,x x i j ϕϕ≡≠。
这时方程组(1.3.8)的系数矩阵:()()()1122A ,0...00A ,...............00...A ,n n K ⎡ϕϕ⎤⎢⎥ϕϕ⎢⎥=⎢⎥⎢⎥ϕϕ⎣⎦作仿射变换 1,i i x x x e h --ξ=∈可将11,,...,n e e e 变成标准单元[0,1]e =。
引入函数011,[0,1],[0,1]()()0,0,N x N x -ξξ∈ξξ∈⎧⎧==⎨⎨⎩⎩其它其它111e (0),,(),i i i i x x x x x N hhx ---⎧∈⎪ϕ-ξξ===⎨⎪⎩其它由1i x x h -=+ξ得,()111111120A ,1()()()1,2,()()()()...,i i x i i i i i i x i i i dx x h x h N x h N d h b a p x q x x b a b a b a b b a np a i q ----⎡β-αα-β⎤⎛⎫+++ ⎪⎢⎥--⎝⎭⎣⎦⎡β-αα-β⎤⎛⎫+++ ⎪⎢⎥--⎝⎭⎣⎦''ϕϕ=ϕϕϕϕ=+ξ+ξξ+ξξξ=⎰⎰111()()(())bi i ai F f x x h N h f d dx-+ϕξξ==ξϕ⎰⎰带入(1.3.8)式得到相应方程组K u F= 则 ()(),u =A 1,2,...,(1.3.9,/)i i i i F i nϕ=ϕϕ这就是我们需要求的线性代数方程组——有限元方程。
4、解:取广义解空间}{120V H [0,1],,(0)0T v v v L v ==∈=,再进行变分求广义解。
任取V v ∈,用它乘以式4题中第一式的两边,并在区间I=[0,1]上积分:211200V d u u vdx vdx v dx ⎡⎤-+=∀∈⎢⎥⎣⎦⎰⎰对左端分部积分,111000du du dv v uv dx vdx dx dx dx ⎡⎤-++=⎢⎥⎣⎦⎰⎰利用(0)0v =以及边界条件(0)0u '=,再加之4题中第一式可以推出,左端第一项为0,带入上式得:[]11()()()()()(1.4.1)u x v x u x v x dx v x dx''+=⎰⎰于是原问题的Galerkin 广义解V u ∈可以表示为:A(,)(),V(1.4.2)u v F v v =∀∈其中: []1A(,)()()()()(1.4.3)u v u x vx u x v x dx''=+⎰1()()(1.4.4)F v v x dx=⎰剖分区间I =[0,1] 0110 (1)i i n x x x x x -=<<<<<<= 单元长度11/i i i h x x n h -=-==,称小区间1e [,]i i i x x -=为单元。