单片机主从机通信
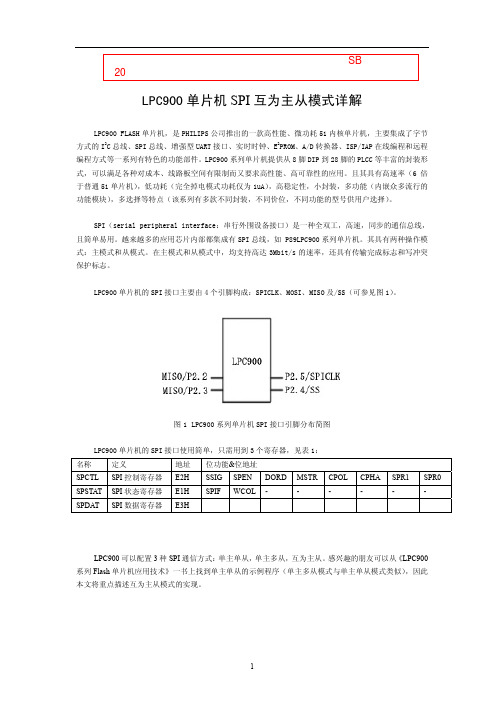
LPC900单片机SPI互为主从模式详解
KEY
BIT
P2.0
2 将 A 上一个引脚连接到 B 的/SS 引脚上,然后拉低/SS,可将 B 强行置为从机模式,同时 B 机会 发生以下变化: a) B 机的 MSTR 位自动清 0, b) B 机的 MOSI 及 SPICLK 强行变为输入模式,MISO 则变为输出模式, c) B 机 SPIF 位置位 d) 如果 SPI 中断使能,B 机将执行 SPI 中断服务程序。
SPSTAT SPI 状态寄存器 E1H SPIF WCOL -
-
-
SPDAT SPI 数据寄存器 E3H
CPHA -
SPR1 -
SPR0 -
LPC900 可以配置 3 种 SPI 通信方式:单主单从,单主多从,互为主从。感兴趣的朋友可以从《LPC900 系列 Flash 单片机应用技术》一书上找到单主单从的示例程序(单主多从模式与单主单从模式类似),因此 本文将重点描述互为主从模式的实现。
//功能:ms 级延时
//----------------------------------
void Delayms(uchar n)
{
int j;
while(n>0)
{
for(j=0;j<=669;j--);
n--;
}
}
//---------------------------------
/*****************************************************************
#include "reg932.h"
#define uchar unsigned char
sbit KEY=P2^0;
STM32硬件SPI主从通信教程

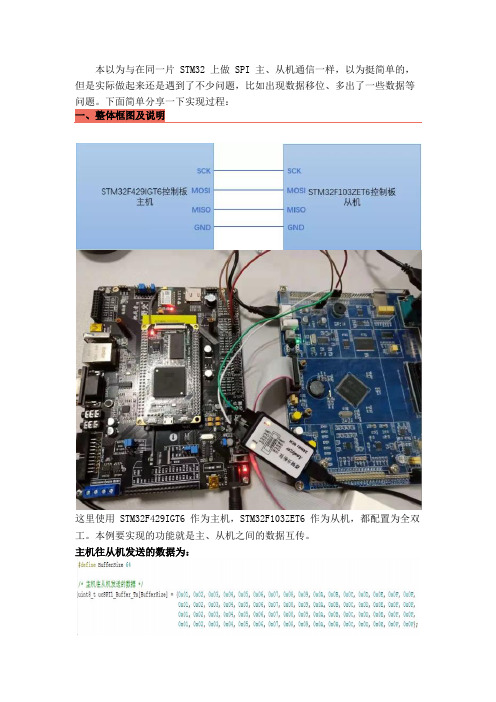
例子说明及框图本例子基于STM32F103ZET6芯片(代码工程可在文末获取),实现SPI1与SPI2的主从通信。
其中SPI1配置为主机,SPI2配置为从机,均配置为全双工模式。
硬件连接图:其中,我们需要注意的是,SPI的从机不能主动发送数据,只能被动应答数据。
本例子的数据交互过程:1.主机使用查询方式发送数据给从机。
2.从机使用中断接收方式接收数据,把接收到的数据加上0x05再发送给主机。
从机总是在收到主机的数据时,才会发送数据给从机。
即从机被动发送数据,也即主机主动申请数据。
代码细节主函数:int main(void){uint8_t i = 0;//-----------------------------------------------------------------------------------------------// 上电初始化函数SysInit();//-----------------------------------------------------------------------------------------------// 主程序while (1){/* 主机发、收数据 */for (i = 0; i < SPI_BUF_LEN; i++){ucSPI1_RxBuf[i] = SPI1_ReadWriteByte(ucSPI1_TxBuf[i]);}}return 0;}其中,ucSPI1_RxBuf与ucSPI1_TxBuf的定义为:uint8_t ucSPI1_RxBuf[SPI_BUF_LEN] = {0};uint8_t ucSPI1_TxBuf[SPI_BUF_LEN] = {0x01, 0x02, 0x03, 0x04, 0x05};SPI1_ReadWriteByte函数为SPI1的读写函数,其作用是往SPI1发送缓冲区写入数据的同时可以读取SPI1接收缓冲区中的数据,其内部实现为:uint8_t SPI1_ReadWriteByte(uint8_t TxData){while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET); // 等待发送区空SPI_I2S_SendData(SPI1, TxData); // 通过外设SPI1发送一个byte数据while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET);// 等待接收完一个bytereturn SPI_I2S_ReceiveData(SPI1); // 返回通过SPIx最近接收的数据}为什么可以这么写呢?看一下SPI的框图:从框图可看出SPI有 2 个缓冲区,一个用于写入(发送缓冲区),一个用于读取(接收缓冲区)。
单片机的通信接口及通信协议概述

单片机的通信接口及通信协议概述随着科技的快速发展,单片机已经成为许多电子产品的核心部分。
而单片机的通信接口及通信协议则扮演着连接与控制外围设备的重要纽带。
本文将对单片机的通信接口及通信协议进行概述,帮助读者了解单片机通信的基本原理与应用。
一、串行通信接口串行通信接口是单片机与外部设备进行数据传输的一种常用方式。
它通过将数据一位一位地顺序传送,使得通信过程更加可靠。
常见的串行通信接口有UART、SPI和I2C。
1. UART(Universal Asynchronous Receiver Transmitter,通用异步收发器):UART是一种最基本的串行通信接口,实现简单,广泛应用于单片机的串口通信。
UART通过将数据以异步的方式进行传输,即发送端和接收端的时钟不同步,可以实现双向通信。
2. SPI(Serial Peripheral Interface,串行外围接口):SPI是一种同步的串行通信接口,适用于单片机与外部设备之间的高速数据传输。
SPI通信主要通过四根线进行,分别是时钟线、数据输入线、数据输出线和片选线。
SPI可以支持单主单从、单主多从和多主多从的通信方式。
3. I2C(Inter-Integrated Circuit,集成电路互连):I2C是一种双线制的串行通信接口,适用于单片机与多个外部设备之间进行数据传输。
I2C接口通常有两根线,即串行数据线(SDA)和串行时钟线(SCL)。
I2C采用主从模式,其中主机由单片机担任,从机可以是各种外围设备。
二、并行通信接口并行通信接口是一种同时传输多个位的通信方式,可以实现更高的数据传输速率。
常见的并行通信接口有GPIO(General PurposeInput/Output,通用输入输出)、外部总线接口等。
1. GPIO:GPIO是单片机通用的输入输出引脚,可以用来与外部设备进行并行通信。
通过对GPIO引脚的电平控制,单片机可以进行数据的输入和输出。
两块STM32之间的SPI主从通信
本以为与在同一片 STM32 上做 SPI 主、从机通信一样,以为挺简单的,但是实际做起来还是遇到了不少问题,比如出现数据移位、多出了一些数据等问题。
下面简单分享一下实现过程:一、整体框图及说明这里使用 STM32F429IGT6 作为主机,STM32F103ZET6 作为从机,都配置为全双工。
本例要实现的功能就是主、从机之间的数据互传。
主机往从机发送的数据为:从机往主机发送的数据为:二、关键代码主机关键代码:从机关键代码:可见,主机与从机的代码大多都一样。
只是从机多了一步启动传输的操作,这一步很关键,少了这一步传输就不正常。
这是为了制造主机发送的同时也要接收到数据的条件。
这一点参考手册里也有相关说明:此处,要营造这样的条件,必须先启动从机,然后再启动主机。
只有保证主机发送的同时有接收到数据,才能保证其时序的正常,否则可能会产生数据错位,或者会产生多余数据等情况。
三、调试我们平时在做实际的开发时,一般很难做到把所有代码写完,跑一遍就能成功,都是需要进行各个子模块的调试,一步一步来,确保各个子模块都没有问题之后,整体跑起来自然就比较稳定。
一些经验丰富的软件工程师常会教导一些年轻的软件工程师:在接到一个开发任务之前,先不要急着码代码,首先需要明确你这项任务的需求是什么,把任务分解成各个模块,然后在电脑上或纸上画出整体框图,确保框图的正确性之后,再根据框图来编写代码、调试。
同样的,我的主管也是这么教导我们的。
此处,我们要调试 SPI 主从通信,自然也是这样分模块进行调试的:•确认主机是否能正确发送数据•确认从机是否能正确发送数据(返回数据给从机)•确认从机是否接收到主机发过来的数据•确认主机是否接收到从机发过来的数据若这几个点明确了,都没问题之后。
就可以明确我们的 SPI 主、从机的基本通讯没有问题了,之后就可以进行我们的协议方面处理了(本例中没有这一部分)。
下面分别看一些这几个点:1、确认主机是否能正确发送数据方法:使用逻辑分析仪捕捉主机的 MOSI、SCK 这两条信号线,查看其波形。
单片机主从控制系统
目录摘要 (I)ABSTRACT (II)第一章绪论 (1)第二章方案设计 (2)2.1设计的任务 (2)2.2单片机串行通信的基本概念 (2)2.3通信方案 (6)2.4主从控制的设计方案 (8)第三章硬件设计 (11)3.1单片机串行口硬件结构介绍 (11)3.2 PROTUES简介 (11)3.3 PROTUES 仿真总体电路硬件设计 (12)3.4 输入模块的设计 (14)3.5 显示模块的设计 (15)3.6 控制模块的设计 (16)3.7时钟电路模块的设计 (17)3.8复位模块的设计 (18)第四章软件设计 (19)4.1开发环境 (19)4.2 编程思路 (20)4.3 主机串口通信控制子程序设计 (20)4.4主机控制程序设计 (21)4.6从机控制程序设计 (25)第五章仿真与调试 (28)总结 (30)致谢 (31)参考文献 (32)附录1 主机控制程序代码 (33)附录2 从机控制程序代码 (37)摘要单片机应用于数据采集或工业控制时,往往需要安装在工业现场,远离主机,构成单片机多机系统,在多机系统中经常采用总线型主从多机控制系统。
主机发送的信息可传送到各个从机,而各从机发送的信息只能被主机接受。
单片机的相互通信有并行通信和串行通信两种,在主从多机控制系统中,经常采用串行通信来交换数据和信息,采用串行通信的方式将现场数据发送给主机处理。
主从控制方式已经在工业中广泛的运用。
在主从控制系统中,单片机的通信由上位机(单片机)控制。
主机向各个从机发送命令或者接受从机反馈的信息,主机有权修改从机的参数,接受从机的数据,还可以查看从机的状态,可以说主机是主从控制的大脑。
本课题所讨论的就是基于AT89C51单片机的主从控制系统,采用串行通信的方式,主机和从机可以实现全双工通信,主机可以向从机发送数据,从机也可以向主机发送数据。
关键词:单片机;主从控制;串行通信;全双工AbstractMicrocontroller used in data acquisition and industrial control often needs to be installed in the industrial field, away from the host, constitute a single chip multi-machine system, often in multi-machine system using bus-based master-slave multi-machine control system. Host sends the information can be sent to each slave, and the information sent from the machine can only be host to accept. MCU communicate with each other are two kinds of parallel communication and serial communication, in the main from the multi-machine control systems, often using serial communication to exchange data and information, using serial communication means to send to the host processing field data.The master-slave control method has been widely used in industry. In the master-slave control system, the communication of the microcontroller (MCU) by the host computer control. Host to each from the machine to send commands or receive feedback information from the machine, the host has the right to modify the parameters of the slave to accept data from the machine, you can also view the status of the slave, can be said that the host is the master-slave control of the brain.The subject under discussion is based on master-slave control AT89C51 SCM system, using serial communication means, master and slave can be full-duplex communication, the host can send data to the slave, the slave can send data to the host.Key words: SCM;Master Control;Serial Communication;Full-duplex第一章绪论随着多微机系统的广泛应用和计算机网络技术的普及,计算机的通信功能显得越来越重要。
触摸屏与单片机的通讯实现
触摸屏与单片机的通讯实现摘要:在当前的嵌入式设备中,触摸屏作为人机接口得到了广泛的应用。
文章讨论了基于HIT6600触摸屏模块与富士通16位单片机90F340串口通讯实现的软硬件设计。
关键词:HIT6600 90F340 触摸屏单片机1、引言随着后PC 时代的到来,嵌入式系统在信息家电、移动计算设备、网络设备、工业控制和仪器仪表等众多领域中得到了广泛的应用,在这些产品中,触摸屏因方便灵活、节省空间、直观等特点,已经逐渐取代键盘成为嵌入式计算机系统主流的输入设备。
触摸屏输入系统由触摸屏、触摸屏控制器、微控制器及其相应的驱动程序构成。
本文介绍触摸屏控制器与富士通16位单片机90f340串口通讯实现的软硬件设计。
2、触摸屏与单片机的硬件连接采用HIT6600触摸屏与90F340单片机一对多通信。
把触摸屏的COM1 9孔插座与串口通讯的90F340单片机相连接。
注意:通信电缆DB9是1-485的正极、6 -485的负极。
由于是一对多的通讯,所以增加串口通讯芯片MAX1487满足分机负载要求。
3、建立触摸屏与单片机通讯的软件设置打开触摸屏组态软件,从[应用]下拉菜单中选[设定工作参数],弹出如图1所示工作参数设置对话框。
触摸屏的系统参数中装置名称设置成ModBus Master,通信参数设置必需与单片机通信参数设置一致。
通信口/连线方式设置成COM1,数据位设置成8位,1个停止位,波特率9600,校验位设置与单片机编程一致,PLC站号是单片机定义的站地址一样,站号需从1开始。
参数设置完成,按确定键。
4、触摸屏的主态软件通讯设置编辑HIT6600触摸屏提供了一种既方便又功能强大的宏指令应用方式,使人机得以经由内部宏指令(Macro Function)功能执行数值运算,逻辑判断,流程控制,数值传递,数值转换,计时器计数器,自定通讯指令操作等等,由宏指令的使用可让人机不仅和PLC 连线通讯,同时由另一通讯口来执行同其他通讯设备连线,此功能不仅提供有效的系统整合同时成为最经济便宜的硬件应用架构。
基于TWI接口实现AVR单片机主从机通信
基于TWI接口实现A VR单片机主从机通信【摘要】Atmel公司的TWI(Two-wire Serial Interface)接口具有硬件实现简单、软件设计方便、运行可靠和成本低廉的优点。
提出了一种以A VR单片机ATmega8为平台基于TWI接口的主从机通信的实现方法,给出了该系统主从机进行通信的硬件结构和软件设计。
该方法对于简化硬件电路、提高系统可靠性、缩短开发周期、降低成本是可行的。
【关键词】A VR;TWI;主机模式;从机模式Master-slave Communication of A VR Microcontroller Based on TWI Interface ZHOU Yong-gang(The 41st Institute of China Electronics Technology Group Corporation,Qingdao Shandong,266555)【Abstract】The TWI interface of ATMEL Corporation has simple hardware,software design has the advantages of convenient,reliable operation and low cost. This article presents the design of master-slave communication system for A VR microcontroller based on TWI interface on the platform of ATmega8,give the structure of the system’s hardware and software desi gn. The method is feasible to simplify the hardware circuit,improve system reliability,shorten development cycles,reduce costs.【Key words】A VR;TWI;Master mode;Slave mode0 引言A VR ATmega系列单片机片内集成两线串行接口TWI模块。
单片机的双机串口通信原理

单片机的双机串口通信原理单片机的双机串口通信原理是通过串口连接两个单片机,使它们能够进行数据的传输和通信。
串口是一种常见的通信方式,它使用两条信号线进行数据的传输:一条是串行数据线(TXD),用于发送数据;另一条是串行接收线(RXD),用于接收数据。
通过串口通信,两个单片机可以进行双向的数据传输,实现信息的互相交流和共享。
在双机串口通信中,一台单片机充当主机(Master),另一台单片机充当从机(Slave)。
主机负责发起通信请求并发送数据,从机负责接收并响应主机发送的数据。
通信过程中,主机和从机需要遵守相同的协议和通信规则,以确保数据的正确和可靠传输。
双机串口通信的主要步骤如下:1. 端口初始化:在双机串口通信开始之前,两台单片机的串口端口需要初始化。
主机和从机需要设置相同的波特率(Baud Rate),数据位数(Data Bits)、停止位数(Stop Bits)和校验方式(Parity Bit),确保两台单片机之间的通信能够正常进行。
2. 数据发送:主机将要发送的数据写入到串口发送寄存器中,然后通过串口发送线路将数据位一位一位地发送给从机。
主机发送完所有数据位后,等待从机的响应。
3. 数据接收:从机通过串口接收线路接收主机发送的数据位,然后将接收到的数据位存放在串口接收寄存器中,等待从机的处理。
4. 数据处理:从机接收到主机发送的数据后,根据通信协议和通信规则进行数据处理。
从机可能需要对数据进行校验、解析和执行相应的操作,然后将处理结果写入到串口发送寄存器中,以供主机进行相应的处理。
5. 响应发送:从机将处理结果写入到串口发送寄存器中,然后通过串口发送线路将数据位一位一位地发送给主机。
从机发送完所有数据位后,等待主机的进一步操作。
6. 数据接收:主机通过串口接收线路接收从机发送的数据位,然后将接收到的数据位存放在串口接收寄存器中,等待主机的处理。
7. 数据处理:主机接收到从机发送的数据后,根据通信协议和通信规则进行数据处理。
单片机多机通信主机(sent)

单片机多机通信主机(sent)#include#define uchar unsigned char#define BN 4 //传送一次的字节数#define Receve 0x01#define Send 0x02uchar SLAVE = 0x01; //从机地址uchar idata rdata0[1]; //接收从机0返回的数据uchar idata tdata0[4]={1,2,3,4}; //向从机0发送的数据uchar idata rdata1[1]; //接收从机1返回的数据uchar idata tdata1[4]={0,15,0,15}; //向从机1发送的数据uchar idata rdata2[1]; //接收从机2返回的数据uchar idata tdata2[1]; //向从机2发送的数据/****************************************************函数名称:延时功能:****************************************************/void delay(unsigned int tc) //显示延时程序{while(tc!= 0 ){unsigned int i;for(i=0; i<100; i++);tc--;}}/****************************************************函数名称:发送错误标志函数功能:****************************************************/void error(){SBUF = 0xff; //发给从机数据出错标志while(TI!=1); //等待发送完毕TI = 0;}/****************************************************函数名称:收、发函数功能:addrs:从机地址comd:从机工作方式命令send[]:发送数据receve[]:接收数据****************************************************/uchar master (uchar addrs,uchar comnd,uchar send[],uchar receve[]){uchar a,i,p;while(1){SBUF=SLA VE; //发呼叫地址while(TI!=1); //等待发送完毕TI = 0;while(RI!=1) //等待从机应答{delay(5);if(RI!=1) goto reti; //等待一段时间无从机回复则跳过};RI = 0;if(SBUF!=addrs) {error();break;} //若地址出错,发出错标志,从机复位,主机跳出此次发送{TB8 = 0; //清地址标志位,准备接收数据SBUF = comnd; //发命令帧while(TI!=1);TI=0;while(RI!=1);RI=0;a=SBUF; //接收从机的返回地址帧if((a&0x80) == 0x80) //若主机非法,发复位信号给从机{TB8=1;error();break;}else{if(comnd == 0x01) //主机发送的命令是请求从机接收数据{if((a&0x01) == 0x01) //从机准备接收就绪{do{p=0; //清校验和for(i=0;i<bn;i++)< bdsfid="142" p=""></bn;i++)<> {SBUF=send[i]; //发送数据p=p+send[i]; //计算校验和while(TI!=1);TI=0;while(RI!=1);}SBUF = p; //发送校验和给从机while(TI!=1);TI=0;while(RI!=1);RI=0;}while(SBUF!=0); //从机接收不正确,主机从新发送TB8=1; //重置地址标志位return(0);}}else{if(comnd == 0x02) //主机发送的是接收数据命令,从机发送数据{if((a&0x02) == 0x02) //从机准备发送就绪{// P0=0x0f;// delay(2000);while(1){p=0;for(i=0;i<bn;i++)< bdsfid="173" p=""></bn;i++)<>{while(RI!=1);RI=0;receve[i]=SBUF; //从从机接收数据p+=receve[i];SBUF=0x11;while(TI!=1);TI=0;}while(RI==0);RI=0;if(SBUF == p){SBUF = 0x00; //校验和相同,发0x00给从机while(TI!=1);TI=0;break;}else{SBUF=0x0f; //校验和不同,发0x0f给从机while(TI!=1);TI=0;}}TB8=1; //重置地址标志位return(0);}}}}}}reti:;}/****************************************************函数名称:主函数功能:****************************************************/void main(){TMOD = 0x20; //定时器T1定义为模式2 TL1=0xfd; //初值TH1=0xfd;PCON=0x00;TR1=1;SCON=0XD8; //设置串口控制字,方式3,允许接收,TB8=1,发地址;master(SLAVE,Receve,tdata0,rdata0);delay(10000);master(SLAVE,Receve,tdata1,rdata0);while(1);}。
单片机双机通信原理
单片机双机通信原理双机通信是指通过单片机(Microcontroller,MCU)系统中的串行通信接口,在两个单片机之间进行数据传输和交换的过程。
其中一个单片机被定义为主机(Master),另一个被定义为从机(Slave)。
双机通信可以实现不同单片机之间的数据共享和协作,使得系统具备更高的可靠性、灵活性和性能。
在双机通信的原理中,主机负责发起通信和控制通信过程,从机负责接收主机发送的指令并执行相应的操作。
通信的过程一般包括以下几个步骤:1. 主机初始化:主机在通信开始前需要进行初始化设置,包括选择合适的通信波特率(Baud Rate),设置通信参数和接收/发送缓冲区等。
2. 建立连接:主机通过发送一个特定的请求信号来与从机建立通信连接。
请求信号可以是一个特定的命令码或者特定的数据帧。
3. 从机响应:从机接收到主机发送的请求信号后,通过发送一个响应信号来回复主机。
响应信号可以是一个应答码或者相应的数据帧。
4. 数据传输:一旦建立了连接并完成了响应过程,主机和从机可以开始进行数据传输。
主机通过发送数据帧给从机,从机则接收并处理这些数据。
5. 错误处理:在数据传输过程中,可能会发生数据错误或者通信错误。
主机和从机通过相应的机制(如校验和)来检测和处理这些错误,以保证通信的可靠性和准确性。
6. 断开连接:当数据传输完成后,主机和从机可以通过发送断开连接的信号来结束通信过程。
断开连接的信号可以是特定的命令码或者特定的数据帧。
总的来说,双机通信的原理是通过主机和从机之间的串行通信接口进行数据传输和交换。
通过建立连接、数据传输和断开连接等步骤,实现两个单片机之间的数据共享和协作。
这种通信方式广泛应用于各种嵌入式系统中,如智能家居系统、工业自动化系统等。
用单片机实现一主三从式多机通信(包括论文)
目录一、题目要求与功能分析 (2)1.1题目要求 (2)1.2功能及整体模块分析 (2)二方案论证 (3)2.1设计目的 (3)2.2设计思路 (3)2.2.1原理分析和讨论 (3)2.2.2题设分析 (4)三、电路设计 (6)3.1 整体功能框架设计 (6)3.2 硬件电路设计 (7)3.2.1 主机硬件电路设计 (8)3.2.2 从机硬件电路设计 (11)3.3软件电路设计 (13)3.3.1 协议设计 (13)3.3.2 主机程序流程图设计 (14)3.3.3 从机程序流程图设计 (15)四系统的调试与实现 (17)4.1主机模块功能调试 (17)4.2从机模块调试 (17)4.3整体设计功能调试 (17)五总结与体会 (19)参考文献 (20)附录 (21)一、题目要求与功能分析1.1题目要求本小组的试验题目如下:一、任务:设计实现多台单片机系统之间的串行通信二、基本要求(难度系数0.8):(1)设计一个主从式多机通信系统,包含1台主机和3台从机,主机和从机全部为单片机;(2)选择合适总线接口芯片,正确连接主机和从机;(3)编程实现分布式数据采集功能,主机可以获取各分机当前AD转换结果,并显示。
三、发挥部分:(1)完善通信功能。
(根据完成情况加分,上限+0.2)1.2功能及整体模块分析随着工业化要求提高,分布式系统发展以及控制设备与监控设备之间通讯需要,多机通信系统设计的监控系统逐步普及。
此多机通信系统具有友好的人机操作界面、强大的IO设备端口驱动能力,可与各种PLC、智能仪表、智能模块、板卡、变频器等实时通讯。
在检测大量模拟量的工业现场使用相似的多机通讯系统;单片机接口丰富,与A/D转换模块组合可以完成相同的工作,并且系统可靠、成本低。
本次实验的目的是就是应用单片机的串口通信功能实现一个分布式采集系统。
整个系统中包含一片主机和三片从机,主机的任务是实现对三片从机的AD 转换结果的采集并在数码管上显示之。
单片机间的串口通信连接方法
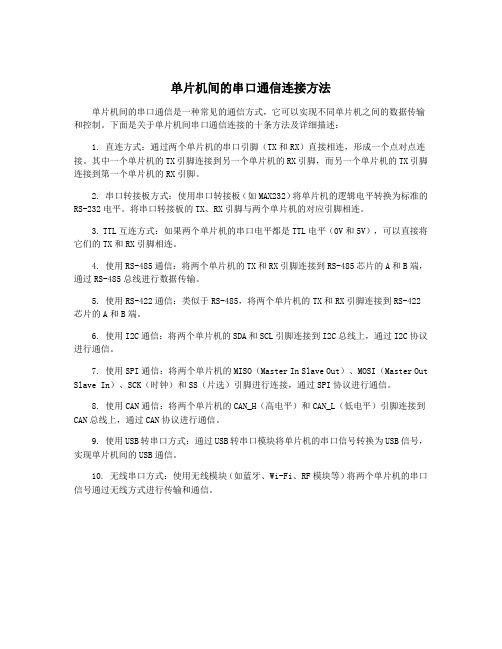
单片机间的串口通信连接方法单片机间的串口通信是一种常见的通信方式,它可以实现不同单片机之间的数据传输和控制。
下面是关于单片机间串口通信连接的十条方法及详细描述:1. 直连方式:通过两个单片机的串口引脚(TX和RX)直接相连,形成一个点对点连接。
其中一个单片机的TX引脚连接到另一个单片机的RX引脚,而另一个单片机的TX引脚连接到第一个单片机的RX引脚。
2. 串口转接板方式:使用串口转接板(如MAX232)将单片机的逻辑电平转换为标准的RS-232电平。
将串口转接板的TX、RX引脚与两个单片机的对应引脚相连。
3. TTL互连方式:如果两个单片机的串口电平都是TTL电平(0V和5V),可以直接将它们的TX和RX引脚相连。
4. 使用RS-485通信:将两个单片机的TX和RX引脚连接到RS-485芯片的A和B端,通过RS-485总线进行数据传输。
5. 使用RS-422通信:类似于RS-485,将两个单片机的TX和RX引脚连接到RS-422芯片的A和B端。
6. 使用I2C通信:将两个单片机的SDA和SCL引脚连接到I2C总线上,通过I2C协议进行通信。
7. 使用SPI通信:将两个单片机的MISO(Master In Slave Out)、MOSI(Master Out Slave In)、SCK(时钟)和SS(片选)引脚进行连接,通过SPI协议进行通信。
8. 使用CAN通信:将两个单片机的CAN_H(高电平)和CAN_L(低电平)引脚连接到CAN总线上,通过CAN协议进行通信。
9. 使用USB转串口方式:通过USB转串口模块将单片机的串口信号转换为USB信号,实现单片机间的USB通信。
10. 无线串口方式:使用无线模块(如蓝牙、Wi-Fi、RF模块等)将两个单片机的串口信号通过无线方式进行传输和通信。
MSP430系列多单片机间的SPI主从通信

图 1 S 总 线 工 作 时序 PI
单 片 机 中大 部 分 具 有 支 持 S I 片 内 串 行 通 信 接 K[ 。 P 的 I] 1
本 文 给 出 了 MS 4 0 4 9与 MS 4 0 1 9单 片 机 之 间 基 P 3F 4 P 3F4
( S线( NS ) 可选 ) 。实 际上 , S I 作 在 三线 方 式 时 , S 当 P工 NS
M SP 3 F4 4 O 49 S M 0 I S Ⅱ 0 ̄ UCL K
: ——
J 4 {4 Y A
A7 A5 Y7 Y5
MS 4 O 4 P 3 F1 9
5 BCT2 4 4 4
要 3 4 线 : 1 是 同步 时 钟 ( C 线 , 于实 现 主 器 ~ 根 第 根 S K) 用 件 和从 器 件 在 MIO 和 MO I 上 串行 数 据 传输 的 同 步 ; S S线 第 2 是 主 输 出 / , 入 ( S) , 于 主 器件 的 输 出 或 根 9输 MO I线 用 者从器件的输入 ; 3 是主输入/ 输 出( S 线 , 第 根 从 MI0) 用 于 主 器 件 的 输 入 或 者 从 器 件 的 输 出 ; 4根 是 从 选 择 第
…
法 。 本 文针 对 MS 4 0 系 列 单 片 机 的 串行 通 信 特 点 和 S I总 线 的 接 口 性 能 , 绍 MS 4 0 4 9和 P3 P 介 P 3F 4 MS 40 19 间 的 三 线 主从 式 S I P 3F 4 之 P 通信 的硬 件 电路 和 软 件 设 计 ; 阐释 寄 存 器 的初 始 化 和 收 发 模 块 的设
51单片机多机通信过程

51单片机多机通信过程51单片机具有多机通信的功能,可实现一台主机于多台从机的通信。
多机通信充分利用了单片机内部的多机通信控制位SM2。
当从机SM2,1时,从机只接收主机发出的地址帧(第九位为1),对数据帧(第九位为0)不予理睬;而当SM2=0时,可接收主机发送过来的所有信息。
多机通信的过程如下:(1)所有从机SM2均置1,处于只接收地址帧状态。
(2)主机先发送一个地址帧,其中前8位数据表示地址,第9位为1表示该帧为地址帧。
(3)所有从机接收到地址帧后,进行中断处理,把接收到的地址与自身地址相比较。
地址相符时将SM2清成0,脱离多机状态,地址不相符的从机不作任何处理,即保持SM2,1。
(4)地址相符的从机SM2=0,可以接收到主机随后发来的信息,即主机发送的所有信息。
收到信息TB8=0,则表示是数据帧,而对于地址不符的从机SM2=1,收到信息TB8=0,则不予理睬,这样就实现了主机与地址相符的从机之间的双机通信。
(5)被寻址的从机通信结束后置SM2=1,恢复多机通信系统原有的状态。
主机:设置为SM2=0。
这是双机通信的形式,可以任意的发送和接收发送:以TB8=1发送,将发送到所有SM2=1的分机。
这是呼叫某个从机。
以TB8=0发送,将发送到SM2=0的分机。
这是双机通信的形式。
------从机:先设置为SM2=1。
这是多机通信的形式,只能收到RB8=1的。
接收:仅能收到RB8=1的数据,确认是呼叫本机时,令SM2=0。
设置为SM2=0后,是双机通信的形式。
追问那从机的RB8要怎么设,是需要软件设置还是单片机自己识别,在编程的时候要怎么写, 回答从机的RB8,不需要编程。
从机的RB8,是接收到的,它是主机发送出来的TB8。
想要对TB8进行控制,需要在主机中编程。
单片机多机通讯说明:该程序为多机通讯程序,最多可以挂255个从机。
该程序主机发送端与多个从机的接收端相接,主机的接收端与多个从机的发送端相接。
单片机的多机通信

作者简介:禹言春(1979-),男,安徽淮北人,助理工程师,主要从事机械检验工作。
收稿日期:2007-04-13单片机的多机通信禹言春1张丽丽2王贺涛1(1安徽省特种设备检测院,安徽合肥 230001;2安徽雷鸣科化公司,安徽淮北 235042)摘 要:单片机多机通信是指由两台以上单片机组成的网络结构,可以通过串行通信方式共同实现对某一过程的最终控制。
本文论述了单片机的多机通信。
关键词:单片机;多机通信;网络结构;串行通信;过程控制中图分类号 T P368.1 文献标识码 B 文章编号 1007-7731(2007)09-157-02单片微型计算机简称为单片机。
随着计算机技术的发展,多机通讯技术也在不断的发展,现在发展比较成熟的还有光纤通信等。
由于计算机的飞速发展和控制系统的复杂化,多机通信已经越来越成为人们热门的话题之一。
单片机多机通信是指由两台以上单片机组成的网络结构,可以通过串行通信方式共同实现对某一过程的最终控制。
目前,单片机多机通信的形式较多,但通常可分为星型、环型、串行总线型和主从式多机型四种,如图1-1所示。
(d)主从式多机型图1-1多机通信网的结构形式主从式多机型是一种分散形网络结构,具有接口简单和使用灵活等优点,现对它进行重点介绍。
1 软件中断型主从式多机通信主从式多机通信程序有两种编写方法:一种是软件中断法,所有从机在收到主机发来地址时就使R I 置 1 ,从机响应串行口中断后就在中断服务程序中实现与主机的联络和通信;另一种是查询法,从机通过查询R I 和T I 状态来实现数据的接收或发送。
现以软件中断法为例进行介绍。
1.1 主从式多机通信原理 在主从式多机系统中,只有一台主机,但从机可以有多台。
主机发送的信息可以传送到各个从机或指定从机,从机发送的信息只能被主机接收,各从机之间不能直接通信。
主机通常由系统机(例如I B M -PC /386)充任,但也可由单片机担当,从机通常为单片机,如图1-2所示。
MCS-51单片机的多机通信方式

多机通信原理
每台从机一个地址(编号) 系统中的通信总是由主机发起 主机向从机发送的信息分为地址字节和数据字节两种。地址字
节用于寻址从机,数据字节为发给从机的实际数据,二者可以 使用第9位来区分。地址字节帧的第9位为1,数据字节帧的第9 位为0 系统初始化时,将所有从机的SM2位置为1,并允许串行口接收 中断。这样,只有主机送来的地址帧才会被接收
单片机原理与应用
MCS-51单片机的多机通信方式
SCON中的SM2位可以作为多处理机通信位,使单片机方便地 应用于集散式分布系统中
集散式分布系统,或者称为分布式控制系统(DCS),是相对于 集中式控制系统而言的一种新型计算机控制系统,它是在集中 式控制系统的基础上发展、演变而来的。这种系统中,有一台 主机和多台从机。主机负责全局运行情况的监视、统计、控制 等,各从机负责本地信号的采集处理、本地资源的控制。主机 和从机通过通信线路相联系
1.2 通信协议的设计
通信协议中,除规定命令、数据的格式,还有以下一些方面需 要特别考虑
命令的顺序 差错处理 超时处理
单片机原理与应用
ห้องสมุดไป่ตู้
1.1 多机通信原理
主从式多机通信连接方式
多机通信原理
当串行口工作在方式2或3时 若SM2=1,则只有接收到的第9位数据(RB8)为1时,才将数据
送入接收缓冲器SBUF,并置位RI,申请中断,否则丢弃接收 到的数据 若SM2=0,则无论第9位数据(RB8)是1还是0,都将数据装入 SBUF,置位RI,申请中断
(完整版)主机与从机

你说的如果是单片机的话,在单片机中起主要作用、发布主要命令的称为主机,接受命令的称为从机。
从一直是被动的,处于接收状态。
从机是可以主动给从机发讯的,这要决定于你的通信协议。
一般情况下,从机总是被动的,只有主机主动发讯,从机回答。
在主机轮讯到要发迅的从机时,从机在回答数据中加入申请发讯请求。
主机收到后在规定时间内停止轮讯,相当于短时变为从机,这时,要发讯的从机就可以主动向目标从机发讯了。
还有,如果发迅量不大的情况下,可以实现所有站点的数据交换而不需要通过主站。
有个工业控制应用现场,要求10个站点间高速传输数据,各站均有按钮指令开关,他们之间的指令互传要求点动操作不能出现迟滞感。
这时,传统的一主站轮询,各从站单独应答方式根本不能满足要求,这是解决办法就是主站发送时,含从站地址,但所有从站接受后各自从数据包不同位置解出自己的数据,而地址对应的从站应答,同样其它所有站同时接受,从数据包相应位置解出自己的数据,这样,通讯步调由主站控制,但每一次通讯,都是1点对多点交换数据。
大大提高了速度。
还有一种令牌时序式通讯协议。
也可以实现从从站直接数据传输。
即每次主站发送完数据,总是等待一段时间,在这段时间内,主站接受状态,释放总线。
留出时间让从机主动,各从机则从主机发讯后的时刻开始计时,各自在规定的时间段内有主动发讯的权利,如果不主动发讯,视为弃权,规定时间过后,如果各从机都不主动发讯,那么主机重新获得主动发讯权。
如果在规定时间段内,某从机主动发迅了,则其它各机自动接受数据,避让总线给发讯的从机使用。
这个主动权依序传递的通讯协议需要由严格的时序和完善的协议内容数据处理程序支持。
各种标准的通讯协议很多,现存标准的通讯协议各式各样的都有,研究他们的工作原理,就会发现,从从通讯也很简单,什么方法都有。
S7-200 PLC与单片机间ModBus主从通信方式
S7-200 PLC与单片机间ModBus主从通信方式邹益民【摘要】介绍一种基于ModBus协议的S7-200 PLC扩展方式,该系统可使用主站或从站方式,与MCS51单片机进行ModBus数据通信,最终扩展S7-200的数据计算、人机接口等应用功能。
该文对S7-200的ModBus-RTU主站及从站通信指令,单片机ModBus通信编程以及MCS51单片机基于Preteus与VSPD虚拟串口的仿真调试技术等进行了较详细的介绍。
文中给出的系统设计方案可给PLC的功能扩展应用提供借鉴。
%A S7-200 PLC expansion mode based on ModBus protocol was introduced. In master or slave mode, PLC achieved ModBus data communications with SCM, and ultimately expanded PLC’s data computing and human-computer interface application features. In this paper,detailed descriptions about the S7-200 communication instruction for ModBus-RTU, the ModBus communication programming of SCM and the debugging techniques of MCS51 based on Preteus and VSPD virtual serial port were also presented. The system design scheme could provide reference for the PLC function expansion.【期刊名称】《工业仪表与自动化装置》【年(卷),期】2015(000)003【总页数】4页(P19-21,85)【关键词】PLC;S7-200;单片机;ModBus协议;数据通信;功能扩展【作者】邹益民【作者单位】南京铁道职业技术学院通信信号学院,南京210031【正文语种】中文【中图分类】TP23;TP2740 引言PLC由于功能强、性价比高、可靠性高、扩展灵活、环境适应能力强及安装维护方便等突出优点而在自动控制系统中得到广泛应用。
单片机的通信协议
单片机的通信协议在现代科技领域,单片机已成为许多电子设备中不可或缺的核心组成部分。
而要实现多个单片机之间的通信,就需要使用特定的通信协议。
本文将介绍一些常见的单片机通信协议,包括SPI、I2C和UART。
一、SPI通信协议SPI(Serial Peripheral Interface)是一种同步的全双工通信协议,用于在主从设备之间传输数据。
SPI通信需要四个线路:时钟线(SCLK)、主从选择线(SS/CS)、主设备输出线(MOSI/SIMO)和主设备输入线(MISO/SOMI)。
SPI通信中,主设备控制通信时序,并通过时钟线将时钟信号传输给从设备。
在每个时钟周期中,主设备通过主设备输出线向从设备发送数据,并通过主设备输入线接收从设备返回的数据。
主从设备通过主从选择线进行选择和区分。
二、I2C通信协议I2C(Inter-Integrated Circuit)是一种双线制的串行通信协议,用于实现多个设备之间的通信。
I2C通信需要两个线路:时钟线(SCL)和数据线(SDA)。
I2C通信中,所有设备都通过这两条线路进行通信。
时钟线由主设备控制,并在每个时钟周期中产生时钟信号。
数据线用于传输数据,包括地址和实际数据。
每个设备都有一个唯一的地址,以便主设备能够选择和与之通信。
三、UART通信协议UART(Universal Asynchronous Receiver Transmitter)是一种异步的串行通信协议,广泛应用于串口通信。
UART通信使用两根线路:数据线(TX/RX)和地线(GND)。
UART通信中,数据线用于发送和接收数据。
发送数据时,数据线上的逻辑电平会根据发送数据的位值变化。
接收数据时,从设备通过数据线接收主设备发送的数据。
地线则用于连接设备之间的公共地。
以上是一些常见的单片机通信协议,每种协议都有其特定的优势和适用场景。
选择合适的通信协议取决于具体的应用需求和硬件限制。
在设计单片机通信系统时,需要考虑到通信速率、设备数量、数据传输可靠性以及硬件成本等方面的因素。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a[1]=led[11];
}
a[2]=led[10];
a[3]=led[minute/10];
a[4]=led[minute%10];
a[5]=led[10];
a[6]=led[second/10];
a[7]=led[second%10];
}break;
case 2://闪烁分位
{
delay(10);//延时去抖
if(K1==0)//按K1进行模式切换
{ M++;
if(M==4)
M=0;
}
while(!K1);//等待按键释放
}
if(M!=0)//进入调节模式
{
switch(M)
{
case 1://模式1——调时
{
if(K2==0)
{
delay(10);//延时去抖
if(K2==0) //加键按下
PCON=0x00; //波特率不加倍
TMOD=0x21; //定时器1以方式1定时
TH0=0xFC;
TL0=0x18;
TH1=0xfD;
TL1=0xfD;//串口波特率为9600
EA=1;//;总中断
SCON=0xa0;
//串口工作方式2,多机通信位SM2=1
TR1=1;//开启定时器1
TR0=1;//开启定时器0
P2=led[b];
delay(10);
P0=k[1]; //秒,高位
P2=led[a];
delay(10);
P0=k[3]; //分,低位
P2=led[d];
delay(10);
P0=k[4]; //分,高位
P2=led[c];
delay(10);
P0=k[6]; //时,低位
P2=led[f];
while(1)//循环
{
a=second/10;//定义时分秒位置
b=second%10;
c=minute/10;
d=minute%10;
e=hour/10;
f=hour%10;
P0=k[2];//定义横杠
P2=0x02;
delay(10);
P0=k[5];
P2=0x02;
delay(10);
P0=k[0]; //秒,低位
unsigned char b[8]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};//扫描
unsigned char k=0;
unsigned int temp;//记录1000毫秒为1秒的变量
unsigned char M,S_flag;//M是模式,更新时间的4种模式加上正常模式S_flag闪烁标志
{
if(hour<23) hour++;
else hour=0;
}
while(!K2);//等待按键释放
}
if(K3==0)
{
delay(10);
if(K3==0)
{
if(hour> 0) hour--;
else hour=23;
}
while(!K3);
}
} break;
case 2://模式2——调分
a[6]=led[second/10];
a[7]=led[second%10];
}break;
case 3://闪烁秒位
{
a[0]=led[hour/10];
a[1]=led[hour%10];
a[2]=led[10];
a[3]=led[minute/10];
a[4]=led[minute%10];
else second=59;
}
while(!K3);
}
} break;
}
}
}
void main()
{
display_led();
init();
while(1) //死循环
{
Send_Time();
key_prc();
display();
}
}
从机程序
#include <reg51.h>
#define uchar unsigned char
sbit K1=P1^0;
sbit K2=P1^1;
sbit K3=P1^2;
void delay(unsigned n)//0.2毫秒
{
int x,y;
for(x=0;x<n;x++)
for(y=0;y<24;y++);
}
void Send_Time() //发送时间函数
{
SBUF=second;
}
} break;
case 3://模式3——调秒
{
if(K2==0)
{
delay(10);
if(K2==0)
{
if(second<59) second++;
else second=0;
}
while(!K2);
}
if(K3==0)
{
delay(10);
if(K3==0)
{
if(second>0) second--;
g++;
send=SBUF; //接收数据
while(RI!=1);//等待接收完成
RI=0;//防止错误判断下次中断的产生
ES=1;//允许串行中断
if(g==1)
{
second=send;
}Hale Waihona Puke if(g==2){
minute=send;
}
if(g==3)
{
hour=send;
g=0;
}
}
void main()//主函数
while(TI==0); //等待发送完成
TI=0;//发送中断标志位清零
delay(10);
SBUF=minute;
while(TI==0);
TI=0;
delay(10);
SBUF=hour;
while(TI==0);
TI=0;
delay(10);
}
void init()
{
M=0;
S_flag=0; //闪烁标志位
#define uint unsigned int
uchar code led[]= {0xfc,0x60,0xda,0xf2,0x66,0xb6,0xbe,0xe0,0xfe,0xf6 }; //数码管
uchar code k[]={ 0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f };//位选
{ temp=0;
second++;
}
if(second==60)
{ second=0;
if(minute<59)
minute++;
else { minute=0;
hour++;
hour%=24;
}
}
if(temp%250==0) //每250ms
S_flag=!S_flag;//闪烁标志位取反
if(k==8) k=0;
P2=a[k];
P0=b[k++];
delay(1);
P0=0xff;
}
void display()//时钟闪烁函数
{
switch(M)
{
case 0://不闪烁
{
a[0]=led[hour/10];
a[1]=led[hour%10];
a[2]=led[10];
a[3]=led[minute/10];
{
if(K2==0)
{
delay(10);
if(K2==0)
{
if(minute<59) minute++;
else minute=0;
}
while(!K2);
}
if(K3==0)
{
delay(10);
if(K3==0)
{
if(minute>0) minute--;
else minute=59;
}
while(!K3);
ET0=1;
}
void display_led()//时间显示位置
{
char m;
for(m=0;m<8;m++)
{
P0=b[m];
}
}
void time0() interrupt 1//定时器0中断函数
{
TH0=0xFC;//定时1ms
TL0=0x18;
temp++;
if(temp==1000)//配合定时器定时1s
delay(10);
P0=k[7]; //时,高位
P2=led[e];
}
}
{
TMOD=0x20; //定时器1的工作方式2
TH1 = 0xFD;
TL1 = TH1; //串口波特率为9600
PCON=0x00; //波特率不加倍
TR1=1;//启动定时器
SCON=0x90;
//串口工作方式2,多机工作控制位SM2=0,允许接收控制位REN=1
EA=1; //中断控制位
ES=1;//允许串行中断
a[5]=led[10];
if(S_flag==1)
{
a[6]=led[second/10];
a[7]=led[second%10];