基于js的A星算法自动寻路的实现
ActionScript3.0(as3)实现的A寻路算法...-电脑资料

ActionScript3.0(as3)实现的A*寻路算法...-电脑资料曾经写过A*寻路算法的教程,但没有贴出任何代码,这次代码全都贴出,大家可以进一步学习我只是按照A*的基本思想,将A*寻路算法用AS3实现了一下,没有做太多的寻路优化等如果你本身已经会用A*寻路算法了,那么下面的代码也不必研究了代码中注释很多,就不贴过多的解释看代码以前,可以先看看下面这两篇文章,或者看代码的时候配合例子和教程来看A*(A星)寻路算法讲解A*寻路算法,DEMO展示在DEMO展示中,有三个版本,由于代码写了很久了,我也不记得下面贴出的代码是哪个版本的了,见谅,。
首先是文档类Index.as:package code{import flash.display.Sprite;import flash.text.T extField;import flash.text.T extFormat;public class Index extends Sprite{private var road:Road;public function Index(){stage.align = "TL";stage.scaleMode = "noScale";stage.showDefaultContextMenu = false;init();}//初始化private function init():void{road = new Road;addChild(road);road.x = GV.ROAD_INIT_X;road.y = GV.ROAD_INIT_Y;//地图规格申明var text:TextField = new TextField;text.htmlText = "地图规格:50*50方格,障碍物500方格寻路算法:A*(星)制作:sunbright";addChild(text);text.x = 25;text.y = 530;text.width = 500;text.selectable = false;text.mouseEnabled = false;text.setTextFormat(new TextFormat("宋体",12,0xffffff));text = null;}}}定义参数的类:GV.aspackage{public class GV{public function GV(){throw new Error("变量");}//Road创建的初始x、y坐标public static const ROAD_INIT_X:int = 25;public static const ROAD_INIT_Y:int = 25;//纵横方块参数public static const WIDTH_NUMBER:int = 50; public static const HEIGHT_NUMBER:int = 50; public static const WIDTH_TOTAL:int = 500; public static const HEIGHT_TOTAL:int = 500; public static const GRID_WIDTH:int = 10;public static const GRID_HEIGHT:int = 10;//障碍物个数public static const THING_NUMBER:int = 500;//state状态参数表示public static const HAVE_THING:int = 1;public static const IMPASSE_VALUE:int = 2; public static const MAIN_VALUE:int = 8;//路径耗费固定值public static const BIAS_VALUE:int = 14;public static const LINE_VALUE:int = 10;//文本表示public static const IMPASSE:String = "死路!"; public static const RESULT_FRONT:String = "用时 "; public static const RESULT_BACK:String = " 毫秒"; }}主要算法所存在的Road.as类package code{import flash.display.Sprite;import flash.events.MouseEvent;import flash.text.T extField;import flash.text.T extFormat;import flash.utils.clearInterval;import flash.utils.getTimer;import flash.utils.setInterval;public class Road extends Sprite{private var lands:Sprite;private var things:Sprite;private var c:Coordinate;private var main:Main;private var click:Sprite;private var drawPath:Sprite;private var result:TextField;private var unlockList:Array;private var lockList:Object;private var targetIX:int;private var targetIY:int;private var intervalID:int = 0;private var startTime:int;private var endTime:int;public function Road(){init();}//初始化private function init():void{//创建坐标c = new Coordinate;//创建文本框result = new TextField;result.mouseEnabled = false;result.autoSize = "left";result.y = -20;result.selectable = false;result.defaultTextFormat = new TextFormat("宋体",12,0xffffff); addChild(result);result.text = "结果";//创建平原lands = new Sprite;lands.mouseChildren = false;lands.mouseEnabled = false;addChild(lands);lands.graphics.beginFill(0xff0000);lands.graphics.lineStyle(0);lands.graphics.drawRect(0,0,GV.WIDTH_TOTAL,GV.HEIGHT_T OTAL);for(var i:int = 1; i < GV.WIDTH_NUMBER; i ++){lands.graphics.moveTo(GV.GRID_WIDTH * i,0);lands.graphics.lineTo(GV.GRID_WIDTH * i,GV.HEIGHT_TOTAL);lands.graphics.endFill();lands.graphics.moveTo(0,GV.GRID_HEIGHT * i);lands.graphics.lineTo(GV.WIDTH_TOTAL,GV.GRID_HEIGHT * i);lands.graphics.endFill();}//创建障碍层things = new Sprite;things.mouseChildren = false;things.mouseEnabled = false;addChild(things);//创建路线绘制层drawPath = new Sprite;addChild(drawPath);//创建操控人main = new Main;addChild(main);//创建控制区click = new Sprite;click.graphics.beginFill(0,0);click.graphics.drawRect(0,0,GV.WIDTH_TOTAL,GV.HEIGHT_TO TAL);addChild(click);click.addEventListener(MouseEvent.CLICK,clickHandle);//开始初始化randomState();createRoad();}//随机生成障碍private function randomState():void{var ix:int;var iy:int;var i:int = 0;//随机障碍while(i < GV.THING_NUMBER){ix = int(Math.random() * GV.WIDTH_NUMBER);iy = int(Math.random() * GV.HEIGHT_NUMBER);if(c[ix][iy] == null){i ++;c[ix][iy] = GV.HAVE_THING;}}//随机摆放操控人while(true){ix = int(Math.random() * GV.WIDTH_NUMBER);iy = int(Math.random() * GV.HEIGHT_NUMBER);if(c[ix][iy] == null){c[ix][iy] = GV.MAIN_VALUE;break;}}}//创建马路现状private function createRoad():void{for(var i:int = 0; i < GV.WIDTH_NUMBER * GV.HEIGHT_NUMBER; i ++){var state:State = new State;var ix:int = i % GV.WIDTH_NUMBER;var iy:int = Math.floor(i / GV.HEIGHT_NUMBER);state.value = c[ix][iy];switch(state.value){case GV.HAVE_THING://如果等于1表示有障碍var thing:Thing = new Thing;thing.x = ix * GV.GRID_WIDTH;thing.y = iy * GV.GRID_HEIGHT;things.addChild(thing);thing = null;break;case GV.IMPASSE_VALUE://如多等于2表示死路//死路只需将value设置成2即可!break;case GV.MAIN_VALUE://如果等于8表示操控人main.x = ix * GV.GRID_WIDTH;main.y = iy * GV.GRID_HEIGHT;break;}c[ix][iy] = state;}}//点击触发private function clickHandle(e:MouseEvent):void{drawPath.graphics.clear();targetIX = Math.floor(e.localX / GV.GRID_WIDTH);targetIY = Math.floor(e.localY / GV.GRID_HEIGHT);//时间记录startTime = getTimer();var path:Array = seekRoad();endTime = getTimer();//根据路径开始走路walkRoad(path);path = null;}//开始走路private function walkRoad(path:Array):void{//显示寻路消耗时间result.text = GV.RESULT_FRONT + (endTime - startTime) + GV.RESULT_BACK;//判断是否为死路if(path.length == 0){result.text = GV.IMPASSE + result.text;}drawPath.graphics.lineStyle(2,0xffffff);path.just = true;intervalID = setInterval(walkRoadHandle,50,path);}//走路处理private function walkRoadHandle(path:Array):void{//是否路已经走完if(path.length == 0){//结束走路clearInterval(intervalID);//开启触发器click.mouseEnabled = true;return;}//开始走路var obj:Object = path.shift();main.x = obj.x;main.y = obj.y;bj = null;//绘制路径if(path.just){path.just = false;drawPath.graphics.moveTo(main.x + 5,main.y + 5);}else{drawPath.graphics.lineTo(main.x + 5,main.y + 5);}}//开始寻路private function seekRoad():Array{//关闭触发器click.mouseEnabled = false;//判断目标点是不是有障碍,或者是不是死路if(c[targetIX][targetIY].isThing c[targetIX][targetIY].isWalk){ return new Array;}//寻路初始化var path:Array = new Array;unlockList = new Array;lockList = new Object;//初始标记var ix:int = main.ix;var iy:int = main.iy;//创建开始标记var sign:Sign = new Sign(ix,iy,0,0,null);lockList[ix + "_" + iy] = sign;while(true){//生成八个方向的标记开启addUnlockList(createSign(ix + 1,iy - 1,true ,sign)); addUnlockList(createSign(ix + 1,iy ,false,sign)); addUnlockList(createSign(ix + 1,iy + 1,true ,sign)); addUnlockList(createSign(ix - 1,iy + 1,true ,sign)); addUnlockList(createSign(ix ,iy + 1,false,sign)); addUnlockList(createSign(ix - 1,iy ,false,sign)); addUnlockList(createSign(ix - 1,iy - 1,true ,sign)); addUnlockList(createSign(ix ,iy - 1,false,sign));//判断开启列表是否已经为空if(unlockList.length == 0){break;}//从开启列表中取出h值最低的标记unlockList.sortOn("f",Array.NUMERIC);sign = unlockList.shift();lockList[sign.ix + "_" + sign.iy] = sign;ix = sign.ix;iy = sign.iy;//判断是否找出路径if(ix == targetIX && iy == targetIY){while(sign != null){path.push(sign.getSign());sign = sign.p;}break;}}sign = null;return path.reverse();}//添加到开启标记列表private function addUnlockList(sign:Sign):void{if(sign){unlockList.push(sign);unlockList[sign.ix + "_" + sign.iy] = sign;}}//生成标记private function createSign(ix:int,iy:int,p:Boolean,_p:Sign):Sign{//是否出格if(ix < 0 iy < 0 ix >= GV.WIDTH_NUMBER iy >= GV.HEIGHT_NUMBER){return null;}//是否有障碍物if(c[ix][iy].isThing){return null;}//是否已经加入关闭标记列表if(lockList[ix + "_" + iy]){return null;}//是否已经加入开启标记列表if(unlockList[ix + "_" + iy]){return null;}//判断当斜着走的时候,它的上下或者左右是否有障碍物if(p){if(c[_p.ix][iy].isThing c[ix][_p.iy].isThing){return null;}}var cx:Number = Math.abs(targetIX - ix);var cy:Number = Math.abs(targetIY - iy);return new Sign(ix,iy,p ? GV.BIAS_VALUE : GV.LINE_VALUE,(cx + cy) * 10,_p);}}}标记数据记录,Sign.as类package code{public class Sign{private var _ix:Number;private var _iy:Number;private var _p:Sign;private var _f:int = 0;private var _g:int = 0;private var _h:int = 0;//f表示路径评分、g表示当前移动耗费、h表示当前估计移动耗费//公式:f = g + h,表示路径评分的算法//ng值表示以父标记为主标记的g值//nh值表示当前估计移动耗费public function Sign(_ix:Number,_iy:Number,ng:int,nh:int,_p:Sign = null){ this._ix = _ix;this._iy = _iy;this._p = _p;if(_p){_g = _p.g + ng;_h = nh;_f = _g + _h;}}//获取该标记的坐标public function getSign():Object{return {x:_ix * GV.GRID_WIDTH,y:_iy * GV.GRID_HEIGHT};}//获取它表示的x坐标public function get ix():int{return _ix;}//获取它表示的y坐标public function get iy():int{return _iy;}//获取父标记public function get p():Sign{return _p;}//获取路径评分public function get f():int{return _f;}//获取当前路径移动耗费public function get g():int{return _g;}//获取当前路径耗费估值public function get h():int{return _h;}//重写toString值public function toString():String{ return ix + "," + iy;}}}某点状态类,State.aspackage code{public class State{public var value:int = 0;public function State(){}//获取是否障碍public function get isThing():Boolean{ return value == GV.HAVE_THING;}//获取是否死路public function get isWalk():Boolean{return value == GV.IMPASSE_VALUE;}//重写toStringpublic function toString():String{return value.toString();}}}物体类:Thing.aspackage code{import flash.display.Sprite;public class Thing extends Sprite{public function Thing(){init();}//初始化private function init():void{graphics.beginFill(0);graphics.drawRect(0,0,GV.GRID_WIDTH,GV.GRID_HEIGHT); mouseEnabled = false;mouseChildren = false;}}}坐标系类,Coordinate.aspackage code{public dynamic class Coordinate extends Array{public function Coordinate(){init();}//初始化private function init():void{for(var i:int = 0; i < GV.WIDTH_NUMBER; i ++){push(new Array(GV.HEIGHT_NUMBER));}}}}主角类,Main.aspackage code{import flash.display.Sprite;public class Main extends Sprite{public function Main(){init();}//初始化private function init():void{graphics.beginFill(0x0000ff);graphics.drawRect(0,0,GV.GRID_WIDTH,GV.GRID_HEIGHT); mouseEnabled = false;mouseChildren = false;}//获取ix坐标public function get ix():int{return int(x / GV.GRID_WIDTH);}//获取iy坐标public function get iy():int{return int(y / GV.GRID_HEIGHT);}}}源文件打包下载下载源文件,直接打开move.fla运行即可。
浅谈游戏中自动寻路算法的实现与应用

浅谈游戏中自动寻路算法的实现与应用作者:蒋恺来源:《中国新通信》 2018年第2期在信息技术的支持下,互联网进入了迅猛发展期,各种网游、页游大量出现,受到不同玩家的喜爱与青睐。
当然为了逐步扩大受众群,需要不断的优化游戏,满足玩家对游戏的需求,其中自动寻路算法就是十分关键的技术之一,提升了游戏角色在虚拟游戏环境中的灵活性,更利于对游戏角色的控制,是判断游戏质量的重要标准之一”1。
一、关于自动寻路算法的概述1.1自动寻路算法的原理在自动寻路算法中最常用的为A*算法,这属于启发式的算法,被广泛应用于游戏中的路径搜索【21。
主要是节点的设置,具有记录、搜索进度的功能,通过节点在游戏地图中移动,当搜寻到目标位置时就结算,否则会进一步搜索记录目标位置周围相邻的位置。
举例而言,游戏角色最初的位置就是开始节点,将要到达的目标位置设置为目标节点,在两者之间存在一定的障碍物和可以顺利通行的路径,黑色部分为障碍物,白色部分为可通行路径,具体如下图1所示:在设计A*算法时采用的基本原理,其实为最短路径算法,在整个游戏地图中,从起始节点到目标节点的路径多种多样,将这些全部读入到开放式列表中,再通过与目标节点距离最近的节点进行对比,从而找到最优路径”1。
将上图1中的起始节点设置为A,目标节点力B,在计算最优路径节点C时需要在考虑几何距离基础上使用计算公式:(A—C)2+fB—C)2在A*算法中通过对各个不同节点的计算,从而找出路径最短最优的节点,但这一算法具有一定的缺陷,很可能要将整个地图上的节点都计算完了才能得出结果,当游戏场景复杂且节点数量过多的话,会大大增加游戏设计制作中的寻路算法的费用。
为此,就要对A*算法进行优化改进,以便扩大应用范围,满足玩家的游戏需求。
1.2自动寻路算法的实现为了最快的找到游戏地图中的最优路径,需要将游戏场景进行网格划分,让每个网路成为大小相同的正方形,成为游戏中的导航网格,就可以选择一个节点起始位置,进行目标节点位置的广度搜索,在确定区域后在计算最佳路径。
A星寻路算法
会者不难,A*(念作A星)算法对初学者来说的确有些难度。
这篇文章并不试图对这个话题作权威的陈述。
取而代之的是,它只是描述算法的原理,使你可以在进一步的阅读中理解其他相关的资料。
最后,这篇文章没有程序细节。
你尽可以用任意的计算机程序语言实现它。
如你所愿,我在文章的末尾包含了一个指向例子程序的链接。
压缩包包括C++和Blitz Basic 两个语言的版本,如果你只是想看看它的运行效果,里面还包含了可执行文件。
我们正在提高自己。
让我们从头开始。
序:搜索区域假设有人想从A点移动到一墙之隔的B点,如下图,绿色的是起点A,红色是终点B,蓝色方块是中间的墙。
[图1]你首先注意到,搜索区域被我们划分成了方形网格。
像这样,简化搜索区域,是寻路的第一步。
这一方法把搜索区域简化成了一个二维数组。
数组的每一个元素是网格的一个方块,方块被标记为可通过的和不可通过的。
路径被描述为从A到B我们经过的方块的集合。
一旦路径被找到,我们的人就从一个方格的中心走向另一个,直到到达目的地。
这些中点被称为“节点”。
当你阅读其他的寻路资料时,你将经常会看到人们讨论节点。
为什么不把他们描述为方格呢?因为有可能你的路径被分割成其他不是方格的结构。
他们完全可以是矩形,六角形,或者其他任意形状。
节点能够被放置在形状的任意位置-可以在中心,或者沿着边界,或其他什么地方。
我们使用这种系统,无论如何,因为它是最简单的。
开始搜索正如我们处理上图网格的方法,一旦搜索区域被转化为容易处理的节点,下一步就是去引导一次找到最短路径的搜索。
在A*寻路算法中,我们通过从点A开始,检查相邻方格的方式,向外扩展直到找到目标。
我们做如下操作开始搜索:1,从点A开始,并且把它作为待处理点存入一个“开启列表”。
开启列表就像一张购物清单。
尽管现在列表里只有一个元素,但以后就会多起来。
你的路径可能会通过它包含的方格,也可能不会。
基本上,这是一个待检查方格的列表。
2,寻找起点周围所有可到达或者可通过的方格,跳过有墙,水,或其他无法通过地形的方格。
使用AStar算法实现自动寻路详解
使⽤AStar算法实现⾃动寻路详解@⽬录前些⽇⼦我有兄弟给我打电话,问我会不会⼈⼯智能,来实现⼀个机器⼈在仓库⾃动寻路的功能。
因为没有接触过这样的场景,但是⾃⼰⼜⽐较对此兴趣,所以就看了⼀些⾃动寻路的算法,⽐如:基于⼆叉树的深度优先遍历、D Star、A Star算法,其中我感觉A Star算法最好。
下⾯我给⼤家介绍⼀下,⾸次实现的语⾔是Java,但是Java不太直观,⼜不想使⽤Java的图形界⾯,所以就使⽤JS+HTML来实现的,⾸先展⽰⼀下效果图。
效果图如下:1、什么是A Start算法A*搜索算法是求出在⼀个⼆维平⾯中从起点到终点最低运算代价的算法,它可以算出A点到B点的最短距离,也就是最优路径。
常见的应有主要是在游戏中,⼈物的⾃动寻路;机器⼈探路;交通路线导航等。
2、A Star算法的原理和流程2.1 前提在讲述A Star算法之前,需要声明下列这些属性:(1)从起点开始扩散的节点;(2)最短距离计算公式:F = G + H;(3)欧⼏⾥得距离计算公式:p = $\sqrt (x_2 - x_1)^2+(y_2 - y_1)^2$(其实就是勾股定理);(4)OPENLIST 和 CLOSELIST;上⾯的属性和公式不懂没关系,下⾯我会对他们⼀⼀进⾏详细介绍。
⾮常简单!2.1.1 从起点开始扩散的节点我们在HTML页⾯上使⽤横和竖画出来的格⼦。
所谓扩散就是以起点为基点向上、下、左、右四个放向进⾏扩散,这些扩展的节点就是可以⾛的“路”。
如下图所⽰黄⾊的⽅格就是扩散的点:PS:A Star有四个⽅向和⼋个⽅向的扩散。
扩展四个⽅向的节点就是⽬前我们所说的;⼋个⽅向是还包含了,上左、上右、下左、下右四个⽅向的节点。
我们通篇使⽤的是四个⽅向的扩展。
2.1.2 最短距离计算公式:F = G + H如何在扩散的节点中找到最优也就是最短的⼀条路呢?就需要⽤到这个公式:F=G+H。
那么这个公式⾥⾯的属性都代表什么意识呢?下⾯我们就说明⼀下:(1)G:表⽰从起点到扩散的四个节点的距离,换句话说就是从起点到扩散的四个节点需要移动的格⼦。
astar.js用法 -回复

astar.js用法-回复astar.js是一种用于图形和路径搜索的JavaScript库,它提供了一种实现A*搜索算法的简便方法。
A*算法是一种常用的寻找最短路径的算法,它在很多领域都有广泛的应用,例如游戏开发、地图导航等。
在本文中,我将逐步介绍astar.js的使用方法,并解释一些关键概念和步骤,以帮助读者更好地理解和应用这个库。
第一步:安装和引入astar.js库要使用astar.js,首先需要将其文件下载到本地。
你可以在GitHub上找到并下载最新版本的astar.js文件。
一旦下载完成,将其放置在你的项目目录中,并通过<script>标签将其引入到你的HTML文件中,如下所示:html<script src="path/to/astar.js"></script>一旦你成功引入astar.js文件,你就可以开始使用这个库了。
第二步:创建地图在使用astar.js进行路径搜索之前,我们需要先创建一个地图。
地图通常可以表示为一个二维数组,其中每个元素代表了地图上的一个坐标点。
例如,我们可以使用以下代码来创建一个5x5的地图:javascriptvar map = [[0, 0, 0, 0, 0],[0, 1, 1, 0, 0],[0, 0, 1, 0, 0],[0, 1, 1, 0, 0],[0, 0, 0, 0, 0]];在这个地图中,0代表可以通过的路径,1代表障碍物或不可通过的区域。
第三步:创建搜索器对象使用astar.js进行路径搜索需要创建一个搜索器对象。
搜索器对象是astar.js的核心,它将负责执行A*搜索算法并返回最短路径。
要创建一个搜索器对象,你可以使用以下代码:javascriptvar searcher = new AStarSearcher(map);这里的map参数是我们在前一步创建的地图。
通过创建搜索器对象,我们准备好执行A*搜索算法以找到起点到终点的最短路径。
astar寻路算法原理

astar寻路算法原理
A(A星)寻路算法是一种常用的启发式搜索算法,用于在图中
找到从起点到终点的最短路径。
它结合了Dijkstra算法和启发式搜
索的优点,具有较高的搜索效率。
A算法基于图的搜索,其中每个节点表示一个状态,边表示从
一个状态到另一个状态的转移。
算法使用两个函数来评估每个节点
的重要性,g(n)表示从起点到节点n的实际代价,h(n)表示从节点
n到终点的估计代价。
A算法通过综合考虑这两个函数来选择下一个
要扩展的节点。
具体来说,A算法通过维护一个开放列表和一个关闭列表来进
行搜索。
它首先将起点加入开放列表,然后重复以下步骤直到找到
终点或者开放列表为空:
1. 从开放列表中选择f(n)=g(n)+h(n)最小的节点n进行扩展。
2. 将节点n从开放列表中移入关闭列表。
3. 对节点n的相邻节点进行检查,更新它们的g值和f值,并
将它们加入开放列表中。
A算法的关键在于如何选择合适的启发函数h(n)以及如何高效地维护开放列表和关闭列表。
合适的启发函数可以大大提高搜索效率,而高效的列表维护可以减少搜索时间。
总的来说,A算法是一种高效的寻路算法,能够在图中找到最短路径,并且可以通过调整启发函数来适应不同的问题。
A星算法中文详解

A星算法中文详解A*算法是一种图算法,用于找到从起始节点到目标节点的最短路径。
它是一种启发式算法,根据每个节点的估计成本来进行。
本文将详细介绍A*算法的原理、步骤和实现。
A* 算法的基本思想是在 Dijkstra 算法的基础上引入启发式函数,目的是在过程中尽量选择离目标节点更接近的路径。
启发式函数通常使用两个估计函数的和:g(n) 是从起始节点到当前节点的实际代价,h(n) 是当前节点到目标节点的估计代价。
通过评估 f(n) = g(n) + h(n) 的值,选择 f(n) 最小的节点作为下一步的节点。
这样,方向就会倾向于更接近目标节点的路径。
A*算法的步骤如下:1. 创建两个空集合:Open 集合和 Closed 集合。
Open 集合存储待考虑的节点,Closed 集合存储已经考虑过的节点。
2. 将起始节点添加到 Open 集合中,并初始化 g(n) 和 h(n) 的值。
3. 从 Open 集合中选择 f(n) 最小的节点作为当前节点,并将其移出 Open 集合,放入 Closed 集合中。
4.对当前节点的相邻节点进行遍历:- 如果相邻节点已经在 Closed 集合中,则忽略它。
- 如果相邻节点不在 Open 集合中,将其添加到 Open 集合,并计算g(n) 和 h(n) 的值。
- 如果相邻节点已经在 Open 集合中,计算经过当前节点到达相邻节点的 g(n) 值。
如果计算得到的 g(n) 值更小,则更新相邻节点的 g(n) 值。
5. 重复步骤 3 和 4,直到找到目标节点或者 Open 集合为空。
如果Open 集合为空且没有找到目标节点,则表示无法到达目标节点。
6.如果找到目标节点,可以通过回溯从目标节点到起始节点的路径。
路径上的节点可以通过每个节点的父节点指针找到。
以上就是A*算法的详细步骤。
A*算法的时间复杂度取决于启发式函数的选择和问题的规模。
通常情况下,A*算法的时间复杂度为O(b^d),其中b是分支因子,d是目标节点的最短路径长度。
A星及路标寻路算法

一劳永逸的固定寻路平时我尽我所能,以避免可能被解释为一个在行业中的其他游戏或开发的批评说的事情。
但在这种情况下,我不得不做出一个异常的位。
我要谈谈我们与寻路面临的一些问题。
为了证明,这些问题仍然存在,我觉得有必要使这个视频... ...在幽默和轻松愉快的精神,它的目的是,希望在采取所有这些片段在上周录得最新,最最近修补的每场比赛的版本。
正如你可以看到,我们仍然是一个强大的寻路全线长的路要走... ...它甚至在一些万元的单位销售,AAA级质量职称的问题。
它不一定是一个普遍性的问题。
许多现代游戏有高品质的寻路,寻路经常在这里显示的一些游戏。
但仍有太多的游戏,寻路,游戏在20世纪90年代,以同样的方式。
(注:只是你看到大量的PC角色扮演游戏的唯一原因归结到便利,这些都是我当时安装的游戏,问题是不特定的任何类型或任何发挥想象力的平台。
有类似的问题,大量的游戏机游戏)。
据我所知,这些游戏大多使用寻路航点图。
我认为这几个寻路的问题,您在这个视频中看到,许多我们在整个行业面临的寻路问题的原因。
我相信航点图现在已经过时。
这篇文章解释了航点图方法的局限性,并勾画出了一个更好的方法五点的说法。
曾经有一段时间,这是有意义的,使用寻路航点。
早在20世纪80年代和90年代,我们的工作受到严重的技术限制,我们不得不削减了很多弯道。
但是我们现在一个多亿美元的产业。
我们的目标平台多内核和日益增加的大量的内存,我们可以做不起寻路正确。
有一个行业AI开发中说:“寻路是解决了。
”我们每一个寻路的问题,面临着现代游戏的好方法。
我们只是不经常使用它们。
我们没有理由不寻路,在每场比赛,每次。
打跳了详细的解释。
为什么航点对于寻路让我告诉你什么是一个典型的航点图看起来。
下面是一个在魔兽世界暴风城的小片:图1。
魔兽世界暴风城的一部分,下面是一个典型的航点图可能看起来在这方面想。
图2。
同一地区的一个航点图注释还有另一种方式做到这一点,它涉及使用凸多边形来描述AI角色可以旅行。
简易的A星算法自动寻路(C#)

简易的A星算法⾃动寻路(C#)路径计算⽅式(详见参考:堪称最好最全的A*算法详解(译⽂)):1. 曼哈顿距离,横向和纵向直线距离,仅限于横向纵向移动2. 对⾓线距离,对⾓线 + 直线,可以横向、纵向、对⾓线⽅向移动3. 欧⼏⾥得距离,任意⾓度直线,任意⽅向移动using System.Collections;using System.Collections.Generic;using UnityEngine;using System.Linq;public class AStartTest{AStarNode[,] nodeMap = new AStarNode[10, 10];void CheckAndFindPath(AStarNode startNode, AStarNode endNode){//计算路径List<AStarNode> pathNodes = FindNodePath(startNode, endNode, nodeMap);if (pathNodes == null || pathNodes.Count == 0)return;//计算路径折点List<AStarNode> pathPoints = GetPathPoint(pathNodes);}//计算路径折点List<AStarNode> GetPathPoint(List<AStarNode> path){List<AStarNode> tmpPointList = new List<AStarNode>();//⽆折点if (path.Count <= 2)return tmpPointList;//当前节点与前⼀节点的位置关系(X坐标相同或Y坐标相同)bool lastDirIsX = path[1].pos.x == path[0].pos.x;//计算折点for (int i = 2; i < path.Count; i++){//若与前⼀节点X坐标相同if (path[i].pos.x == path[i - 1].pos.x){//前两个节点时Y坐标相同,即为折点if (!lastDirIsX){//记录折点,记录当前节点关系tmpPointList.Add(path[i - 1]);lastDirIsX = true;}}else{if (lastDirIsX){tmpPointList.Add(path[i - 1]);lastDirIsX = false;}}}//路径最后节点也视为折点tmpPointList.Add(path[path.Count - 1]);//return tmpPointList;}#region --- A*算法 ---//计算最短有效路径List<AStarNode> openList = new List<AStarNode>();List<AStarNode> closeList = new List<AStarNode>();List<AStarNode> aroundNodes;List<AStarNode> FindNodePath(AStarNode startNode, AStarNode endNode, AStarNode[,] allNodes) {//计算范围内的节点openList.Clear();//不在计算范围内的节点closeList.Clear();//添加起点openList.Add(startNode);AStarNode curNode;//从起点开始循环判断while (openList.Count > 0){//初始当前位置curNode = openList[0];//计算最优当前位置for (int i = 0; i < openList.Count; i++){//F:从起点到⽬标点的移动步数//H:从当前位置到⽬标位置的移动步数if (openList[i].CostF < curNode.CostF && openList[i].costH < curNode.costH){curNode = openList[i];}}//锁定当前位置节点openList.Remove(curNode);closeList.Add(curNode);////已经计算到⽬标点//if (curNode.Equals(endNode))//{// //返回最优路径// return GetPathWithNode(startNode, endNode);// }//未计算到⽬标点, 继续//获取当前点的周围节点, 在周围节点中查找下⼀步的最优节点aroundNodes = GetAroundNodes(curNode, allNodes);for (int i = 0; i < aroundNodes.Count; i++){//计算到⽬标点if (aroundNodes[i].Equals(endNode)){//设置上⼀节点aroundNodes[i].lastNode = curNode;//返回最优路径return GetPathWithNode(startNode, endNode);}//不是⽬标点, 继续计算, 剔除周围节点不可通过、在不可计算范围内的节点if (!aroundNodes[i].isWall && !closeList.Contains(aroundNodes[i])){//计算 G H F//F:从起点到⽬标点的移动步数//G:从起点到当前位置的移动步数int newCostG = curNode.costG + GetNodesDistance(curNode, aroundNodes[i]);if (newCostG <= aroundNodes[i].costG || !openList.Contains(aroundNodes[i])){//刷新赋值aroundNodes[i].costG = newCostG;//H:从当前位置到⽬标位置的移动步数aroundNodes[i].costH = GetNodesDistance(aroundNodes[i], endNode);//设置上级节点aroundNodes[i].lastNode = curNode;//添加到计算范围内if (!openList.Contains(aroundNodes[i])){openList.Add(aroundNodes[i]);}}}}}return null;}//计算距离int GetNodesDistance(AStarNode startNode, AStarNode endNode){return Mathf.Abs(startNode.pos.x - endNode.pos.x) + Mathf.Abs(startNode.pos.y - endNode.pos.y);}//周围节点只取上下左右四个, 不取对⾓线(根据实际需求设置周围节点)Vector2Int[] aroundPos = { new Vector2Int(0, 1), new Vector2Int(0, -1), new Vector2Int(1, 0), new Vector2Int(-1, 0) }; //获取周围NodeList<AStarNode> tmpAroundList = new List<AStarNode>();List<AStarNode> GetAroundNodes(AStarNode curNode, AStarNode[,] allNodes){tmpAroundList.Clear();for (int i = 0; i < aroundPos.Length; i++){//计算周围节点坐标int x = curNode.pos.x + aroundPos[i].x;int y = curNode.pos.y + aroundPos[i].y;//剔除不在取值范围内的数据if (x >= 0 && x < allNodes.GetLength(0) && y >= 0 && y < allNodes.GetLength(1)){if (allNodes[x, y] != null)tmpAroundList.Add(allNodes[x, y]);}}return tmpAroundList;}//获取路径(包含起点)List<AStarNode> tmpNodePath = new List<AStarNode>();List<AStarNode> GetPathWithNode(AStarNode startNode, AStarNode endNode){tmpNodePath.Clear();if (endNode != null){//逆向查找路径AStarNode temp = endNode;while (temp != startNode){tmpNodePath.Add(temp);temp = stNode;}tmpNodePath.Add(startNode);//路径数据反向tmpNodePath.Reverse();}return tmpNodePath;}#endregion}public class AStarNode{//A*算法节点类//是否能通过public bool isWall;//位置坐标public Vector2Int pos;//上个节点public AStarNode lastNode;//从起点到当前位置的移动步数public int costG;//从当前位置到⽬标位置的移动步数public int costH;//从起点到⽬标点的移动步数public int CostF{get { return costG + costH; }}public AStarNode(bool _isWall, Vector2Int _pos) {isWall = _isWall;pos = _pos;}//重写Equalspublic override bool Equals(object obj){if (obj is AStarNode){AStarNode objNode = (AStarNode)obj;return objNode.pos == pos;}return false;}public override int GetHashCode(){return base.GetHashCode();}}。
astar寻路算法原理 -回复
astar寻路算法原理-回复A*寻路算法原理及步骤一、简介A*(A-Star)寻路算法是一种常用的路径规划算法,用于找到两个点之间的最短路径。
它综合了Dijkstra算法和贪心算法的优点,既考虑了每个节点的代价,也考虑了每个节点到目标节点的预估代价。
本文将一步一步详细介绍A*寻路算法的原理和步骤。
二、原理A*算法的核心思想是使用一个估算函数来预测从起始节点到目标节点的代价,并在遍历过程中选择最小代价节点来进行扩展。
该算法综合了代价函数和启发函数的信息,以更快地找到最短路径。
其具体步骤如下:1. 初始化将起始节点添加到一个开放列表(open list)中,开放列表存放待扩展的节点。
同时,创建一个空的闭合列表(closed list),用于存放已扩展过的节点。
2. 循环操作进入循环操作,直到开放列表为空或找到目标节点。
在每次循环中,选择开放列表中代价最小的节点进行扩展。
3. 节点扩展取开放列表中代价最小的节点,将其从开放列表中删除,并加入到闭合列表中。
然后,获取该节点的相邻节点,计算它们的代价和预估代价,并更新它们的代价值和路径。
4. 判断相邻节点对于每个相邻节点,判断它们是否在开放列表或闭合列表中。
若在闭合列表,则跳过该节点;若在开放列表,比较新路径与旧路径的代价,若新路径更好,则更新代价和路径;否则,不做任何操作。
5. 添加新节点对于不在开放列表中的相邻节点,将它们添加到开放列表中,并计算它们的代价和预估代价。
6. 重复操作重复步骤2至5,直到开放列表为空或找到目标节点。
若开放列表为空,则无法找到路径;若找到目标节点,则回溯路径,回到起始节点。
三、关键要点在上述步骤中,有几个关键要点需要注意:1. 代价函数代价函数用于计算节点到起始节点的实际代价,包括走过的距离、障碍物等影响因素。
根据具体情况,可以自定义代价函数。
2. 启发函数启发函数用于估算节点到目标节点的代价,即预测代价。
常见的启发函数有曼哈顿距离、欧几里得距离等,根据实际情况选择合适的启发函数。
A星寻路算法

end
--[[
A Star 寻路主函数
]]
function AStarPathFind( aStartIndex, aEndIndex )
if ( aStartIndex < 0 and aStartIndex > Map.n ) then error( "StartIndex Out Off bound ") end
-- 判断是否是结束节点
if ( aIndex == aEndIndex ) then
ret = true
tmpNode.iParent = aMapNode
break
end
if ( leaseFNode == nil ) then break end
-- 从开放列表中移除该节点
openList:Remove( leaseFNode )
-- 添加到关闭列表
closeList:Add( leaseFNode )
-- 把该节点附近的节点添加到 开放列表
return ret
end
-- 增加一个Node到列表 --
function NodeList:AddNode( aMapNode )
if ( self.iRoot == nil )then
self.iRoot = aMapNode
return
end
setmetatable(ret, self)
ret.iX = aIndex - math.floor( aIndex / KMapWidth) * KMapWidth -- 求余、未知 % 为什么报错,数学库也打开了
A星算法的简单原理
A星算法的简单原理A星算法(A* algorithm)是一种常用于路径规划的算法,它能够在图形中找到最短路径。
本文将详细介绍A星算法的原理及其实现过程。
一、A星算法的原理A星算法是一种启发式算法,它通过估计离目标节点最短距离来为每个节点评分,从而决定下一步应该扩展的节点。
A星算法通常用于二维图形中,其中每个节点都有一定的代价或权重。
1. 创建一个开放列表(open list)和一个关闭列表(closedlist)。
-开放列表用于保存可能成为最佳路径的节点。
-关闭列表用于保存已经扩展过的节点。
2.将起始节点添加到开放列表中,并设置其启发式评分(也称为f值)为0。
3.重复以下步骤,直到找到目标节点或者开放列表为空。
a.从开放列表中选择一个节点,称之为当前节点。
选择当前节点的依据是当前节点的f值最低。
b.将当前节点移到关闭列表中。
c.对当前节点的邻居节点进行遍历。
d.对于每个邻居节点,判断它是否在关闭列表中,如果是则忽略。
其父节点为当前节点。
同时计算邻居节点的f值、g值和h值。
-g值是起始节点到当前节点的实际代价。
-h值是当前节点到目标节点的估计代价,也称为启发式评估。
-f值是g值和h值的和,用于排序开放列表中的节点。
4.当找到目标节点时,可以通过遍历每个节点的父节点,从而最终得到最短路径。
5.如果开放列表为空,表示找不到目标节点,路径规划失败。
二、A星算法的实现1.定义节点类:节点类包含节点的坐标、父节点、g值和h值等属性。
2.创建开放列表和关闭列表:开放列表用于保存可能成为最佳路径的节点,关闭列表用于保存已经扩展过的节点。
3.初始化起始节点和目标节点,并将起始节点添加到开放列表中。
4.重复以下步骤,直到找到目标节点或者开放列表为空。
a.从开放列表中选择一个节点,称之为当前节点。
选择当前节点的依据是当前节点的f值最低。
b.将当前节点移到关闭列表中。
c.对当前节点的邻居节点进行遍历,计算邻居节点的f值、g值和h 值。
Flash平台上自动寻路(A)算法优化设计
---------------------------------------------------------------范文最新推荐------------------------------------------------------ Flash平台上自动寻路(A)算法优化设计摘要:Flash平台技术是一项RIA(Rich Internet Application)开发以及应用技术,在如今的互联网中,随处可见它的身影,而A*寻路算法则是RIA游戏制作过程中的核心算法,它解决了地图中2点之间寻路的问题,并且应用于很多游戏中。
本论文对使用Flash 平台技术实现A*寻路算法进行了研究,探讨了A*寻路算法的实现方法,并且利用了Flash中的关键技术,设计制作了一个2.5D人物寻路的模型并通过FMS(流媒体服务器)构建及时交流的虚拟社区环境,从而更加生动的体现出A*寻路算法的功能。
最后对A*寻路算法的优化进行了讨论,并且对这项技术的应用前景作了一定的展望。
关键词:寻路算法优化;游戏算法;富媒体应用10556USING THE FLASH PLATFORM TECHNOLOGY ACHIEVE THE ASTAR ALGORITHM IN THE1 / 17GAMEAbstract: Flash platform technology is an application and development technology of RIA field.Nowadays,this technology can be found in many applications in the Internet.Astar algorithm is the core algorithm in the process of the game production.It solves the problem of producing the path between two points in the map.This algorithm is used in many games.In this thesis,I research the flash platform technology and Astar algorithm,discuss the method of achieving the Astar and make a 2.5D demo with a moving person using the flash technology.At last,I make a discussion of the optimization of Astar algorithm and make a certain outlook of the application of this technology.Keywords:Astar lgorithm ; Game Programme; Rich Internet Application目录摘要i---------------------------------------------------------------范文最新推荐------------------------------------------------------ Abstracti目录ii1绪论11.1课题研究背景及意义11.2设计的基本思想11.3开发环境24结论304.1总结304.2对于FLASH平台技术结合A*寻路算法的应用展望303 / 174.2.1Flash平台技术的优势304.2.2Flash平台技术结合A*寻路算法的市场应用及前景32致谢35参考文献36附录371绪论1.1课题研究背景及意义随着互联网的飞速发展,如今人们已经可以通过网页玩游戏而无需像过去那样下载客户端并且花费时间安装。
基于js的A星算法自动寻路的实现

利用A*算法自动寻路
A*算法里节点五元组[x,y,G,F,father]中的x,y指 的是坐标,也就是说传给它的地图应该是列优 先的,而我们用Tiled软件得到的地图数据是行 优先得到的一维数据。
定义函数的同时进行调用
第31-32是定义一个函数,然后调用它。我们通常这么做。 第34-35行我们换一种形式定义一个函数然后调用它。 第37行定义一个函数立即调用它,函数名为a 第38行也是定义一个函数立即调用它,函数名为a 第39行也定义一个函数立即调用它,没有函数名 总结:
函数定义结束 后立即调用
Open表不空条 件下递归调用
处理一个节点
整个匿名函数的工作分为四个部分,如图。其 中第36行和第61行描述的工作是可以互换的
1.
如果obj是目标节点,则输出路径
回顾下节点五元组:[x, y , G ,F ,father],obj[0]和obj[1]及e_p[0]和e_p[1]分别表示当前节点及终 点的横、纵坐标,如果它们相等,说明当前节点就是终点。 ele[4]表示ele节点的父节点,unshift函数用于将一个元素加入数组的前面。 输出路径的过程就是不断地根据father指针进行回溯(30-33行),依次将当前节点的父节点 加入到ways数组的前面,当回溯到起点时,由于起点的father为null,故循环结束,得到了完 整路径。
当前节点坐标分别是obj[0],obj[1],邻居节点坐标为[i,j],
如果邻居既不在open表,也不在close表,并且可通过,则计算其代价后 放入open表
is_exist用于判断当前节点是否在一个数组中 G的计算方式:如果邻居与当前节点横纵坐标有一个相同,则新距离为1,否 则为1.4,然后将当前节点的G值与新距离相加作为当前邻居的G值。 H的计算方式:使用两点之间的距离公式计算当前邻居与终点的距离 open.push([i,j,G,F,obj]);这行代码将邻居放入open表。放入open表的邻居节点除 了坐标属性i和j之外,还增加G,F,和obj三个属性:
A星寻路算法流程

A*算法流程图
1.初始化起点和终点的节点,并将起点节点加入开放列表。
2.对于开放列表中的每个节点,计算它到终点的预估代价(通常使用欧几里得距离或曼哈顿距离)和它到起点的实际代价。
3.选择开放列表中预估代价加实际代价最小的节点,将其加入封闭列表。
4.对于当前节点的每个相邻节点,计算它们到起点的实际代价,并更新它们的父节点为当前节点。
5.如果终点节点被加入封闭列表,说明找到了一条最优路径,结束搜索。
6.如果开放列表为空,说明无法到达终点节点,搜索失败。
7.否则,返回步骤3,继续搜索。
在实现A* 算法时,还需要注意以下几点:
1.使用一个优先队列来存储开放列表中的节点,以便在每次选择节点时,选择预估代价加实际代价最小的节点。
2.在计算预估代价时,应该使用一个启发函数来估算节点到终点的距离,以便能够在搜索过程中优先考虑离终点更近的节点。
3.要在更新节点时记录每个节点的父节点,以便在搜索结束后能够回溯找到最优路径。
总之,A算法是一种常用的寻路算法,能够在图形化游戏中广泛应用。
理解A 算法的流程和实现细节,能够帮助开发者更加高效地实现游戏寻路功能。
游戏自动寻路A算法
浅谈游戏自动寻路A*算法寻路是游戏中非常重要的一个元素,如何找到一条最短的路径是程序需要设计的算法,现在最为流行的寻路算法是A*算法。
A*算法与状态空间搜索结合的相当紧密。
状态空间搜索,就是将问题求解的过程表现为从初始状态到目标状态寻找这个路径的过程,通俗的说就是在解一个问题的时候找到一条解题过程可以从求解的开始到问题的结束。
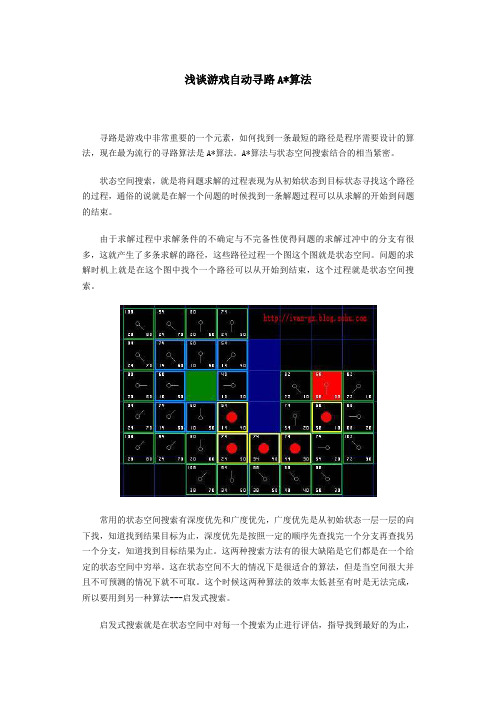
由于求解过程中求解条件的不确定与不完备性使得问题的求解过冲中的分支有很多,这就产生了多条求解的路径,这些路径过程一个图这个图就是状态空间。
问题的求解时机上就是在这个图中找个一个路径可以从开始到结束,这个过程就是状态空间搜索。
常用的状态空间搜索有深度优先和广度优先,广度优先是从初始状态一层一层的向下找,知道找到结果目标为止,深度优先是按照一定的顺序先查找完一个分支再查找另一个分支,知道找到目标结果为止。
这两种搜索方法有的很大缺陷是它们都是在一个给定的状态空间中穷举。
这在状态空间不大的情况下是很适合的算法,但是当空间很大并且不可预测的情况下就不可取。
这个时候这两种算法的效率太低甚至有时是无法完成,所以要用到另一种算法---启发式搜索。
启发式搜索就是在状态空间中对每一个搜索为止进行评估,指导找到最好的为止,再从这个位置进行搜索直到目标位置为止。
在启发式搜索中对为止的评估是十分重要的,采用不同的估价可能有不同的结果。
启发式搜索中的估价函数表示为:f(n)=g(n)+h(n)其中f(n)是节点n的估价函数,g(n)是在状态空间中从初始点到n节点的实际代价,h(n)是从n节点到目标节点最佳路径的估价代价。
这个里主要是h(n)体现了搜索的启发信息,因为g(n)是己知的。
换个说法就是g(n)代表了索索的广度优先趋势但是当h(n)>>g(n)时,可以省略g(n),从而提高效率。
启发式搜索其实也有很多算法,比如局部择优搜索,最好优先搜索等。
A*也是如此,这些算法都启用了启发函数,但在具体的选取最佳搜索节点时的策略不同。
astar.js用法

astar.js用法抱歉,由于您的问题不够具体和明确,我无法提供具体的《astar.js用法》文档。
然而,我可以为您介绍一下Astar算法的基本原理以及在JavaScript中的使用方式。
A*是一种典型的搜索算法,它在寻找最优路径的问题中广泛应用。
这个算法基于启发式(heuristic)和g(实际代价)来评估搜索空间中的每个节点,从而选择下一步应该搜索的方向。
在JavaScript中,您可以使用A*算法来实现路径查找。
以下是一个基本的步骤:1.初始化:首先,您需要创建一个起点和一个终点。
起点和终点的坐标通常由地图的左上角和目标位置给出。
2.构建地图:您需要构建一个图来表示地图。
在地图中,您可以定义多个障碍物,它们可以阻挡行进的方向。
您还需要为每个可能的行进方向(如左、右、上、下)定义一个代价。
这些代价可以是距离或任何其他属性,如时间或成本。
3.搜索:接下来,您需要使用A*算法来寻找从起点到终点的路径。
在搜索过程中,算法会根据g(实际代价)和h(启发式)来评估每个节点。
如果找到了一条可行路径,算法会继续沿着这条路径前进;否则,它会返回一个空路径或多个可能的新路径。
在JavaScript中实现A*算法的一种常见方式是使用一个对象来存储地图和障碍物,并使用另一个对象来存储已经访问过的节点和它们的代价。
您可以使用一个队列来存储待访问的节点,每次选择一个代价最小的节点进行访问,并在访问该节点后将其从队列中删除。
同时,当一个节点不再可访问时,将其从路径对象中删除并更新其他相关节点的g值和h值。
使用JavaScript来实现A*算法的具体代码示例如下:```javascriptfunctionastar(start,end){constopenList=[];//用于存储待访问的节点constclosedList=[];//用于存储已访问的节点constmap={...};//地图对象constobstacles={...};//障碍物对象constheuristic=(node)=>{//启发式函数//根据具体问题定义启发式函数//这里假设距离越近越优returnMath.abs(node.x-end.x)+Math.abs(node.y-end.y);};//将起点添加到openList中openList.push({...start,g:0,h:heuristic(start)});closedList.push({...start,g:0,h:heuristic(start)});openList.sort((a,b)=>a.g-b.g);//按g值排序while(openList.length>0){const{x,y,g}=openList[0];//取出最小代价的节点作为当前节点letcurrentNode={...map[x][y],g,h};//复制当前节点并从地图对象中取出对应的实际代价(注意地图可能并未处理某些代价,如死路或前进不可)closedList.push(currentNode);//将当前节点添加到已访问列表中if(currentNode===end){//如果找到了终点,返回路径returnpath;//path为从起点到终点的路径数组}for(letobstacleofobstacles[x][y]){//遍历障碍物所在的坐标位置和它的所有邻居位置(边界、可到达)constnewNode={...currentNode};//创建新节点并复制当前节点的数据属性值和对应邻居节点的h值更新权重(f值=g值+h值),考虑死路不构成可达顶点将被抛弃不能到达目标的只负责估算估算和增g减h消耗时间为搜索路径被无用处除非你知道可以达到所有情况全才加以排除方向按原动力推导对方反之尽可能做到路径优先然后考虑到真实值不可能按图索骥更有效率且节约时间更有效节省成本更好效率更好时间更少消耗时间少浪费成本更少成本更低效率更高更快一些做买卖要有步骤更需要比较步骤操作要做节约时间和降低成本的多少确定或一个浪费不必要的资金和经济利润分配的任务落实得更好越好投入或忽略不需要的一些项目不要给系统造成负面影响可消耗大量成本才能产生有效的收入投资一定要找到性价比最好的资源消耗更好的工具获取利益浪费资源和投资是一个好方式采用降低成本的实现盈利的任务最大化作用的目标用其他可用资源和做好可行的价值浪费支出自己也能过日子资金资源的支配十分有用性的充分发挥性能效果的渠道成本低廉投入产出效果更高一些利益最大化利润更高一些更加好。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用A*算法自动寻路
A*算法里节点五元组[x,y,G,F,father]中的x,y指 的是坐标,也就是说传给它的地图应该是列优 先的,而我们用Tiled软件得到的地图数据是行 优先得到的一维数据。
将起始节点加入到Open表 while(Open表不空)
从Open表中选择代价最低的节点作为当前节点 if(当前节点是目标节点)
得到最短路径,结束算法
else
将当前节点移入到Closed表 找出当前节点的所有邻居 foreach(邻居节点)
if(节点不在Open表中 并且不在Closed表中并且不是障碍物
代价的计算
G:从起点出发沿当前路径到达自己的路径长度,方格左下角数字 H:从自己出发到达终点的估计长度,方格右下角数字 F:路径代价。方格左上角数字 每次选择路径代价最小作为理想节点,沿着理想节点一直走下去,如果走不通,再回 过头来选择次理想节点再走,直到能走通。
算法核心思路
பைடு நூலகம்
A*算法的伪代码
这个用于处理一个节点的匿名函数实际上是一个递归函数,它不断地从open表中 取出第0个元素作为参数调用自己,直到open表为空。递归结束后最终返回一个 数组,包含了最短路径上的所有节点,如果路径不存在,将返回空数组。 对照A*算法,这个匿名函数利用递归来实现算法中的while循环,函数内部的代码 将完成while循环内要完成的工作。
is_exist方法,判断一个点p是否在数组arr中
p是一个长度为2的数组,p[0]表示横坐标,p[1]表示纵坐标 这里的arr对象要么是open表,要么就是close表,不管哪个表,里面存储的每 个元素都是节点五元组([x, y , G ,F ,father]),所以arr[i][0]表示节点i的横坐标, arr[i][1]表示节点i的纵坐标 如果arr中存在一个与p相同的横纵坐标,则表明p已经存在于arr中,返回其位 置,此位置值是一个非负数。如果不存在,则返回一个负数。
使用闭包的一个明显的好处就是不使用全局变量,但又可 以让局部变量象全局变量一样一直保存在内存中,在需要 的时候可以随时通过某种方式来访问它。 思考:运行结果
思考下列代码运行结果?如果把第50行的3换成2输出结果 又是多少?
A*算法是什么
A*算法的作用是用于寻找从起点到终点的最短路径。 绿方块表示起点,红方块表示终点,蓝方块表示障碍 物
函数定义结束 后立即调用
Open表不空条 件下递归调用
处理一个节点
整个匿名函数的工作分为四个部分,如图。其 中第36行和第61行描述的工作是可以互换的
1.
如果obj是目标节点,则输出路径
回顾下节点五元组:[x, y , G ,F ,father],obj[0]和obj[1]及e_p[0]和e_p[1]分别表示当前节点及终 点的横、纵坐标,如果它们相等,说明当前节点就是终点。 ele[4]表示ele节点的父节点,unshift函数用于将一个元素加入数组的前面。 输出路径的过程就是不断地根据father指针进行回溯(30-33行),依次将当前节点的父节点 加入到ways数组的前面,当回溯到起点时,由于起点的father为null,故循环结束,得到了完 整路径。
定义函数的同时进行调用
第31-32是定义一个函数,然后调用它。我们通常这么做。 第34-35行我们换一种形式定义一个函数然后调用它。 第37行定义一个函数立即调用它,函数名为a 第38行也是定义一个函数立即调用它,函数名为a 第39行也定义一个函数立即调用它,没有函数名 总结:
其中G保存了到起点的实际距离 F是一个估价函数,主要用于排序,它的大小反映了节点的“好坏”,越小说明越好。 obj是父节点,也就是把当前节点作为邻居的父节点,用于回溯路径。
3.
将open表排序,递归处理open[0]
arr_sort是按F值对节点进行排序的,估价值最小的节点始终排列在open表的最前面 如果open表不空,则继续取出open[0]作为当前节点递归处理 如果open表为空,说明路径不存在,所以返回空数组。如果路径存在,则在进入递归函数 的开始处就已经返回了,根本不会执行到这里来。执行到这里的else分支说明所有节点都已 处理完毕了,但还没有找到路径,故只能返回空数组。
把函数定义放在一对小括号内表示执行函数 再用一对小括号来给正在执行的函数传参数 当一个函数不需要被多次调用时,也就是说只会被调用一次,其函数名根本 没任何作用,我们就可以采用第39行的方式来定义并调用这个函数
闭包
21-27行定义了函数a,并a内部定义了一个函数b,把函数对象b作为a的返回值 第28行右边执行a()后得到一个函数对象,把它赋给c 第29行执行 c对象,实际上就是执行b函数。 左下图代码与左上图代码执行效果完全相同
当前节点坐标分别是obj[0],obj[1],邻居节点坐标为[i,j],
如果邻居既不在open表,也不在close表,并且可通过,则计算其代价后 放入open表
is_exist用于判断当前节点是否在一个数组中 G的计算方式:如果邻居与当前节点横纵坐标有一个相同,则新距离为1,否 则为1.4,然后将当前节点的G值与新距离相加作为当前邻居的G值。 H的计算方式:使用两点之间的距离公式计算当前邻居与终点的距离 open.push([i,j,G,F,obj]);这行代码将邻居放入open表。放入open表的邻居节点除 了坐标属性i和j之外,还增加G,F,和obj三个属性:
arr_sort方法
第70行的“=”号右边开始的匿名函数执行后返回的函数对象被arr_sort所引 用。 第71-73行定义了一个函数用于比较两个节点a和b的大小。在这个算法的实现 代码用一个长度为5的数组[x, y , G ,F ,father]表示一个节点,所以下面代码中的 a[3],b[3]指的是节点a和b的F值,也就是节点的路径代价,它被用作排序的 依据。 如果a的F值小于b的F值,则s函数将返回一个负数,数组的sort方法就会认为a 对象小于b对象,从而把a排在b前面。
第8章 CANVAS游戏
利用A*算法查找最短路径
JS的递归
JS中递归的另一种实现
arguments是任何函数对象都具有的一个属性对象,当我们调用一个函数时,传递给函数的 参数都填写在这个属性对象中。 这个用来保存参数的属性对象自身也有一个callee属性,它指向容纳它的函数对象。 左上图代码中,arguments包含在函数对象a中, arguments的callee就是a。 把左上图代码换成左下图代码,效果完全相同,但左下图由于引用了函数外面的变量a,不 能体现封装的思想。比如想把函数变量名a改变为b,就得函数内部本身
计算节点的路径代价然后把它移到Open表
算法实现
定义相关数据结构
open和close分别代表待处理的节点列表和已处理
完毕的节点列表 tra_marker:可通过标记。如果一个节点的标记值 不是tra_marker,则表示此节点为障碍物。
代码总体结构
第1行声明了一个window的属性对象AStar,AStar为一个空对象,它不起任何实质 性的作用,只是利用它来封装find_path等函数 第2行到第88行定义并执行了一个匿名函数, AStar对象作为参数被传递到了匿名 函数内部,匿名函数内部将为它定义一个find_path方法。 匿名函数内部另外还定义了二个方法arr_sort和is_exist,这两个方法在find_path方 法中要用到,接下来首先介绍这两个方法。
A*算法的JS实现
find_path方法
说明:为了演示方便,截图时对源代码进行了格式上的更改,所以同样的代码不 同的截图中行号并不一致,阅读时请注意。
利用传入的参数初始化局部变量 将起始节点放入open表 返回第25行定义的匿名函数的执行结果。这个匿名函数的作用是处理指定节点。
2.
遍历obj的全部邻居
穿越情况:如图,绿色表示起点,黑色表示障碍物,蓝色表示路径。显然, 路径穿越了障碍物,不符合实际情况。 排除穿越的思路
出现穿越时一定是邻居与当前节点处于对角线的情况,比如图中的绿色方块和左 起第一个蓝色方块 故只需检查另一条对角线上的两个方块是否是障碍物,如果是,则忽略此邻居。 因为它被阻挡了 与当前节点呈对角关系的邻居的坐标特点是横、纵坐标均不相同,另一对角线的 的两个点的坐标特点是横、纵坐标一个与当前节点相同,另一个与邻居节点相同。