自动控制原理课程设计 频率法设计串联滞后——超前校正装置
自控大作业——超前滞后校正
自动控制原理大作业已知单位反馈控制系统如图所示,其中0()(1)KG s s s =+。
1、试用频率法设计串联超前校正网络()c G s ,满足:单位斜坡输入时,位置输出稳态误差19ss e =,开环截止频率 4.5/crad s ω''=,相角裕度50γ''≥,请写出校正具体步骤: 解:1.求开环增益K 传递函数为:0()(1)KG s s s =+ 此系统为为Ⅰ型系统,且系统稳定,故由稳态误差911e ss ==K知:K=9校正前系统传递函数为 )()(1s s 9s o +=G(1)根据校正前系统Bode 图,确定校正前系统相角裕度和开环截止频率:0w c =)(L0w 9lg202c= s /rad 3w c =43.18arctanw -90-180)w (180r c c o ==+=ϕ(2)计算校正网络的参数a 和τ:已知开环截止频率 4.5/crad s ω''=取s /rad 5.4w w c m="= 2co w 9lg 20lga 10-5.4"==)(L 06.5a = 0988.006.5*5.41a *w 1m ===τ 10988.01s 5.01s 1s a s c ++=++=s G ττ)((3)验算校正后的性能指标是否满足设计要求:)1s 0988.0)(1s (s )1s 5.0(9)s ()s ()s (c o +++==G G G6.5497.23-47.77-04.6690)w *0988.0(arctan -arctanw -90-)w *5.0(arctan 180)w (180r c cc c =+="""+="+=''ϕ 满足设计要求。
2、用MATLAB 画出校正前系统、校正装置和校正后系统的Bode 图:-100100M a g n i t u d e (d B)10-210-110101102103-180-135-90-45045P h a s e (d e g)Bode DiagramFrequency (rad/sec)MATLAB 程序:G1=tf(9,[1,1,0]);G2=tf(9*[0.5,1],conv([1,1,0],[0.0988,1])); G3=tf([0.5 1],[0.0988 1]) bode(G1) hold bode(G2,'--') hold bode(G3)3、用MATLAB 绘制校正前和校正后系统的单位阶跃响应图,并分析两个系统不同的动态性能指标(超调量、调节时间等):0246810120.20.40.60.811.21.41.6Step ResponseTime (sec)A m p l i t u d eMATLAB 程序:G1=tf(9,[1,1,0]);G2=tf(9*[0.5,1],conv([1,1,0],[0.0988,1])); G3=tf([0.5 1],[0.0988 1]) figureG1_c=feedback(G1,1) G2_c=feedback(G2,1) step(G1_c) hold step(G2_c,'--')动态性能分析: ● 校正前:)()(1s s 9s o +=G9s s 9s 20++=)(ϕ 3w n = 167.061w 21n ≈==ζ%75.58%100*e%100*e%22167.0-1167.0*14.3--1-===ζπζσs06.1167.0-1*314.3-1*w t 22n p ===ζπs986.63*167.05.3w *5.3t n s ===ζ● 校正后:%171.01.0-1.17%=σs648.0t p ≈分析:加入串联超前校正装置后,动态性能中系统超调量下降,稳定性变好,调节时间、峰值时间减小,快速性变好。
用频域设计法设计滞后超前装置(自动控制原理课程设计)

自动控制原理课程设计一 摘要用频域设计法设计一滞后—超前装置,使校正后的某一单位反馈系统满足一定的单位斜坡信号作用下的速度误差系数,校正后相位裕量,时域性能指标超调量和调整时间.关键字:超前 滞后 校正 滞后-超前校正 二设计过程1 设计要求单位反馈系统的开环传递函数为:00()(1)(4)K G s s s s =++ ,校正后系统满足以下指标:单位斜坡信号作用下速度误差系数Kv=10s 1-; 校正后相位裕量40。
≥γ,时域性能指标超调量M ﹪≤30﹪,调整时间s t s 6≤;S t p 2≤ 。
2设计过程根据单位斜坡信号作用下速度误差系数sKr110-=可以得到400=k,所以)125.0)(1(10)(0++=s s s s G绘出系统未校正时的波特图如下:>>> num=10;>> f1=[1,0];f2=[1,1];f3=[0.25,1]; >> den=conv (f1,conv(f2,f3)); >> bode(num,den) 由公式010lg 205lg2030lg 2011=--c c ww 计算得未校正系统的剪切频率sr a d c2=ω,系统未校正时的相角裕量01118090ar c t a n a r c t20.7c c r w w =---=-001802.0r c t a n 1.0a r c t a n 90)()(-=---=∠g g g g w w jw H jw G 由 得 幅值裕量为+8dB002218090arctan arctan 0.2520.7c c r w w =---=-由 得未校正时系统的频率为2s rad ,校正装置在此频率产生一个-8dB 的增益,由以上条件及dB w L c 20)(20=,20lg 20=β可解得校正装置的参数10=β 选取 s r a d w w c /2.010122===τ 所以52=τ超前部分第二个转折频率s T 1241-=α,并取1.0=α,得超前部分传递函数11)(222++=ττααss s cG , 串入一个放大倍数1012==αk c 的放大器以补偿超前校正带来的幅值衰减与超前部分同理可以求得之后部分的第二个转折频率为s c12.010-=ω,取10=β可求得本部分第一个转折频率为s 1102.01-=τβ,故滞后部分的传递函数为1501511)(111++=++=s s s s s G c ττβ 综合以上内容可得该校正装置的传递函数为212(21)(51)()()()(0.21)(501)c c c c s s G s s s s s G G K ++==++由此可作出校正后的波特图如下:>> f1=[2,1];f2=[5,1]; >> num=conv(f1,f2); >> f3=[0.2,1];f4=[50,1]; >> den=conv(f3,f4);>> bode(num,den)010(51)(21)()()()(1)(0.251)(0.21)(501)c s s G s G s G s s s s s s ++==++++校正后的系统的BODE 图如下所示:>> f1=[5,1];f2=[2,1];num=10*conv(f1,f2);>> f3=[1,0];f4=[1,1];f5=[0.25,1];f6=[0.2,1];f7=[5,10]; >> den=conv(f3,conv(f4,conv(f5,conv(f6,f7)))); >> bode(num,den)校验校正后系统的相角裕量为2/c rad s ω=,49.1γ= ≥40时域性能指标的要求:对超调量和调节时间要转换到开环频率域的性能指标由最大超调量%0.160.4(1)r M M =+-%30%M ≤ 1.35r M ⇒=而 sck t πω=2112 1.5() 2.5()r r k M M --=++ 6s t s ≤*1.6/c rad s ω⇒= *11sin ()47.8rM γ-==验证校正后的系统是否满足设计的要求(时域指标与频域指标)2/c rad s ω=,49.1γ= 很明显满足相角裕量条件和时域指标要求。
自动控制原理课程设计 超前校正

自动控制原理课程设计一. 设计题目1.掌握控制系统的设计与校正方法、步骤。
2.掌握对控制系统的相角裕度、稳态误差、截止频率和动态性能分析。
3.掌握利用matlab 对控制理论内容进行分析。
4.提高大家分析问题解决问题的能力。
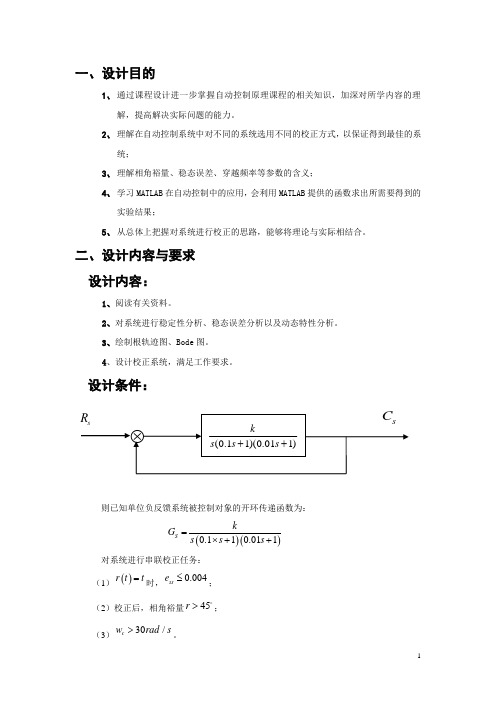
二. 题目任务及要求题目1:已知单位负反馈系统被控制对象的开环传递函数()()10+=s s K s G 用串联校正的频率域方法对系统进行串联校正设计。
任务:用串联校正的频率域方法对系统进行串联校正设计,使系统满足如下动态及静态性能指标:(1)在单位斜坡信号作用下,系统的稳态误差rad e ss 151<; (2)系统校正后,相位裕量 45≥γ。
(3)截止频率s rad c /5.7≥ω。
设单位负反馈系统的开环传递函数为)1()(+=s s K s G用相应的频率域校正方法对系统进行校正设计,使系统满足如下动态和静态性能:(1) 相角裕度045≥γ;(2) 在单位斜坡输入下的稳态误差为1.0=sse ; (3) 系统的剪切频率wc <4.4rad/s 。
(4)模值余度h ≥10dBk=10;num1=[1];den1=conv([1 0],[1 1]); sys1=tf(k*num1,den1); figure(1);Margin(sys1);hold onfigure(2);sys=feedback(sys1,1) step(sys)Transfer function:10-------s^2 + s未校正前的Bode图未校正前的的阶跃响应曲线由图可以看出未经校正的Bode图及其性能指标,还有如图(-2)所示的未校正的系统的阶跃响应曲线。
由图(-1)可以看出系统的:模值稳定余度; h=∞dB; -pi穿越频率:Wg=∞dB;相角稳定余度为γ=180剪切频率:Wc=3.08rad/s;由图(-1)可以知道,系统校正前,相角稳定余度=18<45。
为满足要求,开环系剪切频率wc=3.08rad/s<4.4rad/s。
自动控制原理MATLAB课程设计--滞后-超前校正
滞后-超前校正——课程设计一、设计目的:1. 了解控制系统设计的一般方法、步骤。
2. 掌握对系统进行稳定性的分析、稳态误差分析以及动态特性分析的方法。
3. 掌握利用MATLAB 对控制理论内容进行分析和研究的技能。
4. 提高分析问题解决问题的能力。
二、设计内容与要求:设计内容:1. 阅读有关资料。
2. 对系统进行稳定性分析、稳态误差分析以及动态特性分析。
3. 绘制根轨迹图、Bode 图、Nyquist 图。
4. 设计校正系统,满足工作要求。
设计条件:1、被控制对象的传递函数是m m 1m 2012mn sn 1n 2012nb s b s b s b ()a s a a s a G S ----+++⋯+=+++⋯+(n≥m)2、参数a0,a1,a2,...an和b0,b1,b2,...bm因小组而异。
设计要求:1. 能用MATLAB 解复杂的自动控制理论题目。
2. 能用MATLAB 设计控制系统以满足具体的性能指标。
3. 能灵活应用MATLAB 的CONTROL SYSTEM 工具箱和SIMULINK 仿真软件,分析系统的性能。
三、设计步骤:1、自学MATLAB软件的基本知识,包括MATLAB的基本操作命令。
控制系统工具箱的用法等,并上机实验。
2、基于MALAB用频率法对系统进行串联校正设计,使其满足给定的领域性能指标。
要求程序执行的结果中有校正装置传递函数和校正后系统开环传递函数,校正装置的参数T,α等的值。
已知开环传递函数为G(S)= 0(2)(40)k s s s ++,使用频率法设计串联滞后—超前校正装置,使系统的相角裕度大于等于40°,静态速度误差系数等于20。
校正前根据上式可化简G(S)= 00.0125(0.51)(0.0251)k s s s ++,所以公式G(S)=20(0.51)(0.0251)s s s ++,所以=1,则c w = 6.1310,相角裕度γ为9.3528。
自动控制原理课程设计频率法的超前校正
目录一.目的 (2)二.容 (2)三.基于频率法的超前校正设计 (2)四.校正前、后系统的单位阶跃响应图及simulink框图、仿真曲线图 (5)五. 电路模拟实现原理 (7)六.思考题 (9)七.心得体会................................................. .10 八.参考文献................................................. .10题目一 连续定常系统的频率法超前校正一.目的1.了解串联超前校正环节对系统稳定性及过渡过程的影响;2.掌握用频率特性法分析自动控制系统动态特性的方法;3.掌握串联超前校正装置的设计方法和参数调试技术;4.掌握设计给定系统超前校正环节的方法,并用仿真技术验证校正环节理论设计的正确性。
5.掌握设计给定系统超前校正环节的方法,并模拟实验验证校正环节理论设计的正确性。
二.容已知单位反馈控制系统的开环传递函数为:()()100()0.110.011o G s s s s =++设计超前校正装置,使校正后系统满足:11100,50,%40%v c K s s ωσ--=≥≤三.基于频率法的超前校正设计1.根据稳态误差的要求,确定系统的开环增益K ;0s 0100lim ()lim (0.11)(0.011)v s K s s sK s s s G →→===++=1001s -未校正系统的开环频率特性为:()0100()(0.11)0.011G j j j j ωωωω=++2.根据所确定的开环增益K ,画出未校正系统的伯德图,并求出其相位裕1γ 由00()1c G j ω=得0c ω ≈30.84090arctan 0.1arctan 0.01ϕ(ω)=-ωω--又()001180+c ϕωγ=代入0c ω得1γ= 0.83o3.选取c ω=561s -,计算α的值()()()00c c c c L L L ωωω=+= ()()0110lg10lg c c c L L ωωαα=-=-=所以有 01|20lg ()|10lg c A ω=α即有 α=0.0754.确定校正网络的转折频率1ω和2ω和传递函数c G11115.34c s T-ω===21207.41Tω===α1s -所以超前校正网络的传递函数为:15.34()207.41c s G s s +=+为了补偿因超前校正网络的引入而造成系统开环增益的衰减,必须使附加放大器的放大倍数为1α=13.33 所以有115.3415.34()13.33207.41207.4113.3315.34(1)14.34207.41(1)207.41c s s G s s s s s++==⨯α++⨯+=+ 5.校正后系统的开环传递函数为:()()()()013.3315.34(1)10015.34()()0.110.011207.41(1)207.41100(1)15.340.110.011(1)207.41c sG s G G s s s s s s ss s s ⨯+==++++=+++6.对验证校正后的系统1190arctan 0.1arctan 0.01arctanarctan 207.4115.34o c c c c γωωωω=----+ = 40.44又110.160.4(1)0.160.4(1)37.740%sin sin 40.44oσ%=+⨯-=+⨯-=%<γ 所以符合系统的要求7.画校正前、校正后、校正系统的伯德图 在MATLAB 命令窗口键入以下命令: Go=zpk([ ],[0 -10 -100],100000); bode(Go) hold on margin(Go)求得校正前系统的伯德图如图1.1所示。
自动控制原理课程设计串联超前滞后校正装置

自动控制原理课程设计报告一、设计目的(1)掌握控制系统设计与校正的步骤和方法。
(2)掌握对控制系统相角裕度、稳态误差、剪切频率、相角穿越频率以及增益裕度的求取方法。
(3)掌握利用Matlab对控制系统分析的技能。
熟悉MATLAB这一解决具体工程问题的标准软件,能熟练地应用MATLAB软件解决控制理论中的复杂和工程实际问题,并给以后的模糊控制理论、最优控制理论和多变量控制理论等奠定基础。
(4)提高控制系统设计和分析能力。
(5)所谓校正就是在系统不可变部分的基础上,加入适当的校正元部件,使系统满足给定的性能指标。
校正方案主要有串联校正、并联校正、反馈校正和前馈校正。
确定校正装置的结构和参数的方法主要有两类,分析法和综合法。
分析法是针对被校正系统的性能和给定的性能指标,首先选择合适的校正环节的结构,然后用校正方法确定校正环节的参数。
在用分析法进行串联校正时,校正环节的结构通常采用超前校正、滞后校正和滞后-超前校正这三种类型。
超前校正通常可以改善控制系统的快速性和超调量,但增加了带宽,而滞后校正可以改善超调量及相对稳定度,但往往会因带宽减小而使快速性下降。
滞后-超前校正兼用两者优点,并在结构设计时设法限制它们的缺点。
二、设计要求(姬松)1.前期基础知识,主要包括MATLAB系统要素,MATLAB语言的变量与语句,MATLAB的矩阵和矩阵元素,数值输入与输出格式,MATLAB系统工作空间信息,以及MATLAB的在线帮助功能等。
2.控制系统模型,主要包括模型建立、模型变换、模型简化,Laplace变换等等。
3.控制系统的时域分析,主要包括系统的各种响应、性能指标的获取、零极点对系统性能的影响、高阶系统的近似研究,控制系统的稳定性分析,控制系统的稳态误差的求取。
4.控制系统的根轨迹分析,主要包括多回路系统的根轨迹、零度根轨迹、纯迟延系统根轨迹和控制系统的根轨迹分析。
5.控制系统的频域分析,主要包括系统Bode 图、Nyquist 图、稳定性判据和系统的频域响应。
自动控制原理课程设计题目
自动控制原理课程设计题目:1、已知单位负反馈系统的开环传递函数K()(10)(60)G SS S S=++,试用频率法设计串联超前滞后校正装置,使(1)输入速度为1rad s时,稳态误差不大于1126rad。
(2)相位裕度30γ≥,截止频率为20rad s。
(3)放大器的增益不变。
要求:分析设计要求,说明校正的设计思路(超前校正,滞后校正或滞后-超前校正),确定串联校正装置传递函数并确定有源校正网络各元器件的参数,绘制校正网络电路图;详细设计(包括的图形有:校正结构图,校正前系统的Bode图,校正装置的Bode图,校正后系统的Bode图);用MATLAB编程代码及运行结果(包括图形、运算结果);校正前后系统的单位阶跃响应图。
2、针对二阶系统,单位负反馈系统的开环传递函数:,1)引入该校正装置后,单位斜坡输入信号作用时稳态误差,开环截止频率ωc’≥4.4弧度/秒,相位裕量γ’≥45°;2)根据性能指标要求,确定串联超前校正装置传递函数; 3)利用Matlab 绘制校正前、后及校正装置对数频率特性曲线;4)设校正装置R1=100K ,R2=R3=50K ,根据计算结果确定有源超前校正网络元件参数R4、C 值;5)绘制引入校正装置后系统电路图(设给定的电阻和电容:R=100K ,C=1μF 、10μF 若干个);6)利用Matlab 仿真软件辅助分析,绘制校正前、后及校正装置对数频率特性曲线,并验算设计结果;7)在Matlab-Simulink 下建立系统仿真模型,求校正前、后系统单位阶跃响应特性,并进行系统性能比较。
要求:分析设计要求,说明校正的设计思路(超前校正,滞后校正或滞后-超前校正);详细设计(包括的图形有:校正结构图,校正前系统的Bode 图,校正装置的Bode 图,校正后系统的Bode 图);用MATLAB 编程代码及运行结果(包括图形、运算结果); 校正前后系统的单位阶跃响应图。
自动控制课程设计--频率法串联超前校正
自动控制课程设计报告题目频率法串联超前校正院系机电工程系专业测控技术与仪器二零一二年十一月目录摘要 (3)1课程设计目的内容及要求................. 错误!未定义书签。
1.1设计目的 ......................... 错误!未定义书签。
1.2设计内容与要求.................... 错误!未定义书签。
1.3课程设计条件...................... 错误!未定义书签。
2系统设计步骤 .......................... 错误!未定义书签。
2.1系统计算 ......................... 错误!未定义书签。
2.2matlab程序运用.................... 错误!未定义书签。
2.3校正前系统bode图及分析........... 错误!未定义书签。
2.4一次校正后的bode图............... 错误!未定义书签。
2.5二次校正后的bode图分析........... 错误!未定义书签。
3小结 .................................. 错误!未定义书签。
参考文献................................ 错误!未定义书签。
摘要利用频率法串联超前校正,可以根据已知传递函数,分析系统是否稳定。
当一个或某些系统参数的变化时,确定闭环极点随参数变化的轨迹,进而研究闭环系统极点分布变化的规律。
应用matlab 仿真,只需进行简单计算就可得知系统一个或某些系统参数变化对闭环极点的影响趋势。
这种定性分析在研究系统性能和提出改善系统性能的合理途径方面具有重要意义。
【关键词】:闭环特征方程,根轨迹,零极点分布,mtlab 仿真一、设计目的:1、了解控制系统设计的一般方法、步骤。
2、掌握对系统进行稳定性分析、稳态误差分析以及动态特性分析的方法。
3、掌握利用MATLAB 对控制理论内容进行分析和研究的技能。
控制工程(自动控制)超前校正与滞后校正
例:
单位负反馈系统的开环传递函数为: 单位负反馈系统的开环传递函数为: K G0 ( s ) = s ( s + 1) 设计指标: 设计指标: 系统在单位速度输入作用下的稳态误差≤ (1)系统在单位速度输入作用下的稳态误差≤0.1 ; 开环系统截止频率ω (2)开环系统截止频率ωc"≥4.4rad/s ; 相位裕量γ"≥45 γ"≥45° (3)相位裕量γ"≥45°; 幅值裕量h"≥10dB (4)幅值裕量h"≥10dB ; 试设计串联无源校正装置。 试设计串联无源校正装置。
单位负反馈系统的开环传递函数为: 单位负反馈系统的开环传递函数为: 例: K
G0 ( s 计指标: 设计指标: 校正后系统的静态速度误差系数 系统的静态速度误差系数K (1)校正后系统的静态速度误差系数Kv=30 ; 开环系统截止频率 截止频率ω (2)开环系统截止频率ωc"≥2.3rad/s ; 相位裕量γ ≥40° (3)相位裕量γ"≥40°; 幅值裕量h (4)幅值裕量h"≥10dB ; 试设计串联校正装置。 试设计串联校正装置。
αTs + 1
ω
γ'
γ ''
验证已校正系统的相角 4)验证已校正系统的相角 裕度和幅值裕度是否满 足要求
G ( s ) = G0 ( s )Gc ( s )
= 10(0.456s + 1) s( s + 1)(0.114 s + 1)
L(ω )(dB )
ωc ' = 3.16rad / s
40 20 0
[-20]
ωc' '
10
G (s) c
基于某频率分析报告法的串联滞后超前校正

信息科学与工程学院课程设计报告书课程名称:自动控制原理课程设计班级:自动化0906学号:200904134178姓名:钟鸣指导教师:杨岚2011 年12 月31号● 一、题目3:已知单位负反馈系统的开环传递函数为:)101.0)(11.0()(++=s s s Ks G k用用串联校正的频率域方法对系统进行串联校正设计。
任务:用用串联校正的频率域方法对系统进行串联校正设计,使系统满足如下动态及静态性指标: (1)在单位斜坡信号t t r =)(作用下,系统的速度误差系数1100-=s K v ;1≤ω时,()sin r t t ω=谐波输入的稳态误差701≤ss e ;(2)系统校正后,相位裕量:045)(>c ωγ;在幅值穿越频率c ω之前不允许有十倍频/60dB -;(3)对Hz 60的扰动信号,输出衰减到250/1● 二、校正前的系统特性根据稳态误差系数的要求100)1s 1.00)(11.0()(lim 0=++⋅==→s s Ks s sW k s v 由 得100=K原系统开环传递函数为)101.0)(11.0(100)(++=s s s s G k频率特性为:)101.0)(11.0(100)(++=ωωωωj j j j G k00.20.40.60.811.21.41.61.82图1. 时域阶跃响应-150-100-50050100M a g n i t u d e (d B )101010101010P h a s e (d e g )Bode DiagramGm = 0.828 dB (at 31.6 rad/sec) , P m = 1.58 deg (at 30.1 rad/sec)Frequency (rad/sec)图2 校正前系统的伯德图dB gK L L L 40l 20)1(,401lg 10lg )1()10(==-=--且s rad L L c c c /1.31,4010lg lg )10()('''=⇒-=--ωωω又有0'c '00'8.511.00.1090180)(≈---=ωωωγarctg arctg c c ,说明该系统处于临界稳定状态,且要进行串联校正的的()()o o o o c cm 45558.140≈+-=∆+'-''=γωγωγϕ s/6.31180290)(00rad arctgarctg g gg g ≈⇒-=---=ωωωωϕ1≤ω时,()sin r t t ω=谐波输入的稳态误差701≤sse,即要满足701)()(≤=s R s E e ss)(又s s R s E G 11)()(+=, 即701G 11≤+)(ωj ,69)(≥⇒ωj G 对于高频的扰动信号,要使其输出衰减到250/1,即2501G 1)G(j 2≤+=fj πωωω)( 2491)(≤⇒ωj G , 而当HZ f 60=时,s /377rad =ω,24910018.0)(≤=ωj G 满足要求。
串联超前校正系统分析自动控制原理课程设计
一、设计目的1、 通过课程设计进一步掌握自动控制原理课程的相关知识,加深对所学内容的理解,提高解决实际问题的能力。
2、 理解在自动控制系统中对不同的系统选用不同的校正方式,以保证得到最佳的系统;3、 理解相角裕量、稳态误差、穿越频率等参数的含义;4、 学习MATLAB 在自动控制中的应用,会利用MATLAB 提供的函数求出所需要得到的实验结果;5、 从总体上把握对系统进行校正的思路,能够将理论与实际相结合。
二、设计内容与要求 设计内容:1、阅读有关资料。
2、对系统进行稳定性分析、稳态误差分析以及动态特性分析。
3、绘制根轨迹图、Bode 图。
4、设计校正系统,满足工作要求。
设计条件:⊗则已知单位负反馈系统被控制对象的开环传递函数为:()()0.110.011S kG s s s =⨯++对系统进行串联校正任务: (1)()r t t=时,0.004ss e ≤;(2)校正后,相角裕量45r >; (3)30/c w rad s>。
sR设计要求1、能用MATLAB 解复杂的自动控制理论题目;2、能用MATLAB 设计控制系统以满足具体的性能指标;3、能灵活应用MATLAB 的SIMULINK 仿真软件,分析系统的性能。
三、设计原理校正方式的选择,按照校正装置在系统中的链接方式,控制系统校正方式分为串联校正、反馈校正、前馈校正、和复合校正4种。
串联校正是最常见的一种校正方式。
串联校正方式是校正器与受控对象进行串联连接的。
可分为串联超前校正、串联滞后校正和滞后-超前校正。
其一般设计步骤如下:(1)根据静态性能指标,计算开环系统的增益。
之后求取校正前系统的频率特性指标,并与设计要求进行比较;(2)确定校正后期望的穿越频率,具体值得选取与所选择的校正方式相适应; (3)根据待设计的校正环节的形式和转折频率,计算相关参数,进而确定校正环节; (4)得出校正后系统。
检验系统满足设计要求。
四、设计步骤1、校正前的系统分析 时域分析: 其中已知21()R s s =---------------------------------------------------------------------------------①()1H s = ---------------------------------------------------------------------------------②()()()0.110.011kG s s s s =⨯⨯+⨯+ --------------------------------------------------------③根据稳态误差公式1lim ()1()()ss s e R s s G s H s →=⨯⨯+⨯ -------------------------------------------------------④③将①②③带入④式得()211lim1(0.11)0.011ss s e s ks s s s →=⨯⨯+⨯⨯+⨯+化简得出1ss e k =又有题目0.004ss e ≤最后得250k ≥此时取250k =进行分析。
自动控制原理串联滞后校正装置课程设计
自动控制原理串联滞后校正装置课程设计“自控原理课程设计”参考设计流程一、理论分析设计1、确定原系统数学模型;当开关S断开时,求原模拟电路的开环传递函数个G(s)。
c);ω(γc、ω2、绘制原系统对数频率特性,确定原系统性能:3、确定校正装置传递函数Gc(s),并验算设计结果;设超前校正装置传递函数为:,rd>1),则:'cω处的对数幅值为L('cωm,原系统在ω='cω若校正后系统的截止频率由此得:由,得时间常数T为:4、在同一坐标系里,绘制校正前、后、校正装置对数频率特性;二、Matlab仿真设计(串联超前校正仿真设计过程)注意:下述仿真设计过程仅供参考,本设计与此有所不同。
利用Matlab进行仿真设计(校正),就是借助Matlab 相关语句进行上述运算,完成以下任务:①确定校正装置;②绘制校正前、后、校正装置对数频率特性;③确定校正后性能指标。
从而达到利用Matlab辅助分析设计的目的。
例:已知单位反馈线性系统开环传递函数为:≥450,幅值裕量h≥10dB,利用Matlab进行串联超前校正。
'γ≥7.5弧度/秒,相位裕量'cω要求系统在单位斜坡输入信号作用时,开环截止频率c)]、幅值裕量Gmω(γ1、绘制原系统对数频率特性,并求原系统幅值穿越频率wc、相位穿越频率wj、相位裕量Pm[即num=[20];den=[1,1,0];G=tf(num,den); %求原系统传递函数bode(G); %绘制原系统对数频率特性margin(G); %求原系统相位裕度、幅值裕度、截止频率[Gm,Pm,wj,wc]=margin(G);grid; %绘制网格线(该条指令可有可无)原系统伯德图如图1所示,其截止频率、相位裕量、幅值裕量从图中可见。
另外,在MATLAB Workspace下,也可得到此值。
由于截止频率和相位裕量都小于要求值,故采用串联超前校正较为合适。
自动控制原理 第五章第十二节频率法串联校正——超前校正

① 由 e*ss
K
② 由 G0 (s) L0 (w ) wc0 g 0 wc0 , g 0 均不足
③ 确定 m = g * − g 0 + (5 ~ 10)
a = 1 + sinm , 10lg a 1 − sinm
④ 作图设计 A − B − C − D Gc (s)
⑤ G(s) = Gc (s) G0 (s) 验算是否满足要求
g = 180 + (wc1 )
= 180 + arctan 5.16 − 90 − arctan 5.16 − arctan 5.16
1.94
13.73
= 180 + 69.4 − 90 − 79 − 20.6 = 58.8 ( 60)
5.12 频率法串联校正——超前校正
例1
G(s) = K s(s + 1)
− +
1 1
a = 1 + sinm 1 − sinm
● 超前网络特点:相角超前,幅值增加
● 最有效的 a (4, 10)
● 一级超前网络最大超前角为60º
5.12 频率法串联校正——超前校正
2. 串联超前校正 实质 — 利用超前网络相角超前特性提高系统的相角裕度
超前校正步骤 (设给定指标 e*ss , wc* , g *)
= 1 aTs + 1 a Ts + 1
a = R1 + R2 1 R2
T = R1R2C R1 + R2
a Gc(s)
=
aTs + 1 Ts + 1
=
Gc (s)
5.12 频率法串联校正——超前校正
1. 超前网络特性
自动控制原理课程设计__频率法设计串联滞后——超前校正装置

目录一、设计任务.......................................... .. .. (1)二、设计要求.......................................... .. (1)三、设计步骤 (1)1.未校正前系统的性能分析 (1)1.1开环增益K (1)1.2校正前系统的各种波形图 (2)1.3由图可知校正前系统的频域性能指标 (4)1.4特征根 (4)1.5判断系统稳定性 (5)1.6分析三种曲线的关系 (5)1.7求出系统校正前动态性能指标及稳态误差 (5)1.8绘制系统校正前的根轨迹图 (5)1.9绘制系统校正前的Nyquist图 (6)2.校正后的系统的性能分析 (7)2.1滞后超前校正 (7)2.2校正后系统的各种波形图 (8)2.3由图可知校正后系统的频域性能指标 (10)2.4特征根 (11)2.5判断系统稳定性 (11)2.6分析三种曲线的关系 (11)2.7求出系统校正后动态性能指标及稳态误差 (11)2.8绘制系统校正后的根轨迹图和Nyquist图 (11)四、心得体会....................................... .. .. (13)五、主要参考文献......................................... .. (13)一、 设计任务已知单位负反馈系统的开环传递函数0()(0.11)(0.011)K G S S S S =++,试用频率法设计串联滞后——超前校正装置。
(1)使系统的相位裕度045γ>(2)静态速度误差系数250/v K rad s ≥ (3)幅值穿越频率30/C rad s ω≥二、设计要求(1)首先,根据给定的性能指标选择合适的校正方式对原系统进行校正,使其满足工作要求。
要求程序执行的结果中有校正装置传递函数和校正后系统开环传递函数,校正装置的参数T ,α等的值。
自控实验报告超前校正(3篇)
第1篇一、实验目的1. 理解超前校正的原理及其在控制系统中的应用。
2. 掌握超前校正装置的设计方法。
3. 通过实验验证超前校正对系统性能的改善效果。
二、实验原理超前校正是一种常用的控制方法,通过在系统的前向通道中引入一个相位超前网络,来改善系统的动态性能。
超前校正能够提高系统的相角裕度和截止频率,从而改善系统的快速性和稳定性。
超前校正装置的传递函数一般形式为:\[ H(s) = \frac{1 + \frac{K}{T_{s}s}}{1 + \frac{T_{s}s}{K}} \]其中,\( K \) 为校正装置的增益,\( T_{s} \) 为校正装置的时间常数。
三、实验设备1. 控制系统实验平台2. 数据采集卡3. 计算机及仿真软件(如MATLAB/Simulink)4. 待校正系统四、实验步骤1. 搭建待校正系统模型:在仿真软件中搭建待校正系统的数学模型,包括系统的传递函数、输入信号等。
2. 分析系统性能:通过仿真软件分析待校正系统的性能,包括稳态误差、超调量、上升时间等。
3. 设计超前校正装置:根据待校正系统的性能要求,设计合适的超前校正装置参数。
4. 仿真验证:将设计好的超前校正装置添加到系统中,进行仿真验证,观察校正后的系统性能。
5. 实验数据分析:对实验数据进行分析,比较校正前后系统的性能差异。
五、实验内容1. 系统模型搭建:搭建一个简单的二阶系统模型,其传递函数为:\[ G(s) = \frac{1}{(s+1)(s+2)} \]2. 系统性能分析:分析该系统的稳态误差、超调量、上升时间等性能指标。
3. 设计超前校正装置:根据系统性能要求,设计一个超前校正装置,其传递函数为:\[ H(s) = \frac{1 + \frac{K}{T_{s}s}}{1 + \frac{T_{s}s}{K}} \]其中,\( K = 2 \),\( T_{s} = 0.5 \)。
4. 仿真验证:将设计好的超前校正装置添加到系统中,进行仿真验证,观察校正后的系统性能。
自动控制原理简明教程 5-6控制系统的频率法设计和校正
Gc (s)
1 jbT 1 jT
对数幅频特性为Lc () 20 lg
1 b2T2 2 1 T2 2
对数相频特性为:c ()=arctgbT arctgT
根据两角和的三角公式,可得:
c
(
)
arctg
bT T 1 bT 2 2
将上式求导, 并令其=0, 可得最大滞后相角频率为:
dc () d
(b 1)T (b b2 )T 3 2 [1 (bT)2 ](1 T)2
超前校正的实质是利用超前网络的相角超前
特性,在已校正系统的截止频率
' c
处,产生
足够大的超前相角,以补偿原系统在该处的
相角滞后。只要正确的将超前网络的交接频
率1/(aT)和1/T选在待校正系统截止频率的两
边,就可以使已校正系统的截止频率和相角
裕度满足性能指标的要求,从而改善系统的
动态性能。而系统的稳态性能,需要通过补
传递函数的零极点分布如下图:
j
1 1
T
aT
零点比极点更靠近虚轴。同时考虑到(1/a)<1的 衰减作用,系统的开环增益会下降,为了消除 这一影响,应将放大器的增益提高a倍。经过 补偿衰减作用后,无源超前网络的伯德图如下 图所示:
频率响应为
Gc (s)
1 jaT 1 jT
dB Lc ()
20lga
无源超前网络的电路图如下图所示:
R1
u1
C
R2
u2
校正系统的传递函数为:G(S) u2 (S)
R2
整理得:G(S )
R2 R1 R2
1 R1CS 1 R2R1C
S
u1 (S )
R2
用频率法设计串联超前校正
频率法设计串联超前校正河南科技大学课程设计说明书课程名称控制理论课程设计题目用频率法设计串联超前校正学院班级学生姓名指导教师时间控制理论课程设计任务书班级: 姓名: 学号:设计题目: 用频率法设计串联超前校正一、设计目的控制理论课程设计是综合性与实践性较强的教学环节。
其目的要进一步巩固自动控制理论知识,培养所学理论知识在实际中的应用能力;掌握自动控制系统分析、设计和校正的方法;掌握应用MATLAB 语言分析、设计和校正控制系统的方法;培养查阅图书资料的能力;培养使用MATLAB 语言软件应用的能力、培养书写技术报告的能力。
使学生初步掌握控制系统数字仿真的基本方法,同时学会利用MATLAB 语言进行控制系统仿真和辅助设计的基本技能,为今后从事控制系统研究工作打下较好的基础。
二、设计任务及要求应用时域法、频域法或根轨迹法设计校正系统,根据控制要求,制定合理的设计校正方案;编写相关MATLAB 程序,绘制校正前后系统相应图形,求出校正前后系统相关性能指标;比较校正前后系统的性能指标;编制设计说明书。
三、控制要求 设单位负反馈系统的开环传递函数为()(0.11)K G s s s =+,试用频率法设计串联超前校正装置,是系统的相对裕度°45γ≥,静态速度误差系数Kv=200,截止频率不低于15rad/s 。
四、设计时间安排查找相关资料(1天);编写相关MATLAB 程序,设计、确定校正环节、校正(2天);编写设计报告(1天);答辩修改(1天)。
五、主要参考文献[1] 胡寿松. 自动控制原理(第五版), 科学出版社.[2]黄永安,李文成等.Matlab7.0/Simulink6.0应用实例仿真与高效算法开发.北京:清华大学出版社,2008[3] 黄坚主. 自动控制原理及其应用. 北京:高等教育出版社 2004[4].黄忠霖,自动控制原理的MATLAB 实现,国防工业出版社.指导教师签字: 年 月 日摘要通过自动控制原理的学习,我们知道了分析系统的基本方法。
自动控制原理课程设计题目

第1组 已知单位负反馈系统的开环传递函数0()(0.051)(0.11)K G S S S S =++,试用频率法设计串联滞后——超前校正装置使系统的速度误差系数150v K s -≥,相位裕度为00402γ=±,剪切频率(100.5)c rad s ω=±。
第2组 已知单位负反馈系统的开环传递函数02K G(S)S (0.2S 1)=+,试用频率法设计串联超前校正装置,使系统的相角裕量035γ≥,静态加速度误差系数aK 10= 第3组 已知单位负反馈系统的开环传递函数0K G(S)S(S 2)(S 40)=++,试用频率法设计串联滞后——超前校正装置,使系统的相角裕量040γ≥,静态速度误差系数1v K 20s -=第4组 已知单位负反馈系统的开环传递函数0()11(1)(1)26K G S S S S =++,试用频率法设计串联滞后校正装置,使系统的相位裕度为00402γ=±,增益裕度不低于10dB ,静态速度误差系数1v K 7s -=,剪切频率不低于1rad s第5组 已知单位负反馈系统的开环传递函数0()(0.11)(0.011)K G S S S S =++,试用频率法设计串联滞后——超前校正装置,使系统的相位裕度045γ>,静态速度误差系数250/v K rad s ≥, 幅值穿越频率30/C rad s ω≥第6组 已知单位负反馈系统的开环传递函数0K G(S)S(0.0625S 1)(0.2S 1)=++, 试用频率法设计串联滞后校正装置,使系统的相位裕度050γ=,静态速度误差系数1v K 40s -=,增益欲度30—40dB 。
第7组 已知单位负反馈系统的开环传递函数26()(46)G S S S S =++,试用频率法设计串联滞后校正装置使系统的速度误差系数1v K ≥,相位裕度为00402γ=±,剪切频率0.090.01c rad s ω=±。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录设计任务 (3)设计要求 (3)设计步骤 (3)未校正前系统的性能分析 (3)1.1开环增益K (3)1.2校正前系统的各种波形图 (4)1.3由图可知校正前系统的频域性能指标 (7)1.4特征根 (7)1.5判断系统稳定性 (7)1.6分析三种曲线的关系 (7)1.7求出系统校正前动态性能指标及稳态误差 (7)1.8绘制系统校正前的根轨迹图 (7)1.9绘制系统校正前的Nyquist图 (9)校正后的系统的性能分析 (10)2.1滞后超前校正 (10)2.2校正前系统的各种波形图 (11)2.3由图可知校正前系统的频域性能指标 (15)2.4特征根 (15)2.5判断系统稳定性 (15)2.6分析三种曲线的关系 (15)2.7求出系统校正前动态性能指标及稳态误差 (15)2.8绘制系统校正前的根轨迹图和Nyquist图 (16)心得体会 (18)主要参考文献 (18)一、设计任务已知单位负反馈系统的开环传递函数0()(0.11)(0.011)K G S S S S =++,试用频率法设计串联滞后——超前校正装置。
(1)使系统的相位裕度045γ>(2)静态速度误差系数250/v K rad s ≥ (3)幅值穿越频率30/C rad s ω≥二、设计要求(1)首先,根据给定的性能指标选择合适的校正方式对原系统进行校正,使其满足工作要求。
要求程序执行的结果中有校正装置传递函数和校正后系统开环传递函数,校正装置的参数T ,α等的值。
(2)利用MATLAB 函数求出校正前与校正后系统的特征根,并判断其系统是否稳定,为什么? (3)利用MATLAB 作出系统校正前与校正后的单位脉冲响应曲线,单位阶跃响应曲线,单位斜坡响应曲线,分析这三种曲线的关系?求出系统校正前与校正后的动态性能指标σ%、tr 、tp 、ts 以及稳态误差的值,并分析其有何变化? (4)绘制系统校正前与校正后的根轨迹图,并求其分离点、汇合点及与虚轴交点的坐标和相应点的增益K *值,得出系统稳定时增益K *的变化范围。
绘制系统校正前与校正后的Nyquist 图,判断系统的稳定性,并说明理由? (5)绘制系统校正前与校正后的Bode 图,计算系统的幅值裕量,相位裕量,幅值穿越频率和相位穿越频率。
判断系统的稳定性,并说明理由?三、设计步骤开环传递函数0()(0.11)(0.011)K G S S S S =++1、未校正前系统的性能分析 1.1开环增益0K已知系统中只有一个积分环节,所以属于I 型系统 由静态速度误差系数 250/v K rad s ≥ 可选取v K =600rad/ss rad K S S S K SS H S SG K s s V /600)101.0)(11.0(lim )()(lim 00==++==→→开环传递函数为 )101.0)(11.0(600)(++=S S S S G1.2通过MATLAB 绘制出校正前系统的bode 图和校正前系统的单位阶跃响应图分别如:MATALAB 程序为: >> clear>> k=600;n1=1;d1=conv(conv([1 0],[0.1 1]),[0.01 1]); s1=tf(k*n1,d1); >> figure(1);sys=feedback(s1,1);step(sys)>> c=dcgain(sys);[y,t]=step(sys);[max_y,k]=max(y);tp=t(k) >> max_overshoot=100*(max_y-c)/c >> r1=1;>> while(y(r1)<0.1*c) r1=r1+1; end >> r2=1;>> while(y(r2)<0.9*c) r2=r2+1; end>> tr=t(r2)-t(r1) >> s=length(t);>> while y(s)>0.98c&&y(s)<1.02*c s=s-1; end >> ts=t(s)>> figure(2);margin(s1);hold on>>figure(3);sys=feedback(s1,1);impulse(sys) >>figure(4);step(k*n1,[d1,0]) >>ess=1-dcgain(sys)图1-1校正前系统的bode图图1-2校正前系统的单位阶跃响应图1-3校正前系统的单位脉冲响应图1-4校正前系统的单位斜坡响应1.3由图可知校正前系统的频域性能指标如下:幅值裕度h L =-14.7dB ; 穿越频率x ω=31.6/rad s ; 相角裕度r=-26.8度; 剪切频率c ω=69.8/rad s 。
1.4特征根:1.5判断系统稳定性(1)由图1可以看出,0>c ω之前对数幅频渐近特性曲线所对应的相频特性曲线穿越了π-,(2)由特征根可以看出,有根在右半平面,因此系统不稳定,按本题要求,需要进行串联滞后超前校正。
1.6分析校正前单位脉冲响应曲线,单位阶跃响应曲线,单位斜坡响应曲线,这三种曲线的关系单位斜坡响应的一次导数是阶跃响应曲线,阶跃响应的一次导数是冲击响应。
1.7求出系统校正前动态性能指标σ%、tr 、tp 、ts 以及稳态误差的值=%σmax_overshoot = 560.9737 tr =0.0145 tp =0.1489ts =0.1998 ess =01.8绘制系统校正前的根轨迹图,并求其分离点、汇合点及与虚轴交点的坐标和相应点的增益K *值,得出系统稳定时增益K *的变化范围。
程序: >> clear>> k=600;n1=1;d1=conv(conv([1 0],[0.1 1]),[0.01 1]); s1=tf(k*n1,d1); >> k=0:0.05:200;>> figure(1);rlocus(s1,k)>> figure(2);nyquist(s1)>> [k,poles]=rlocfind(s1)Select a point in the graphics windowselected_point =-97.7488 - 1.5528ik = 0.0391poles = 1.0e+002 *-1.0248-0.0376 + 0.1466i-0.0376 - 0.1466i图1-5校正前系统的根轨迹分离点-10与虚轴的交点为-97.7488 1.5528i,当取 -97.7488 - 1.5528i 点时,k=(0 0.0391)1.9绘制系统校正前的Nyquist图,判断系统的稳定性,并说明理由。
图1-6校正前系统的耐奎斯特曲线因为系统的耐奎斯特曲线顺时针包围(-1,j0)点1圈,所以R=-1,没有实部为正的极点所以P=0,Z=P-R=1,闭环系统不稳定。
2、校正后的系统的性能分析 2.1滞后超前校正题目中要求30/C rad s ω≥,取C ω=35rad/s ,过C ω处作一斜率为-20 dB/dec 的直线作为期望特性的中频段。
图2-1为使校正后系统的开环增益不低于250rad/s ,期望特性的低频段应与未校正系统特性一致。
而未校正系统的低频段斜率与期望特性的中频段斜率同为-20dB/dec ,即两线段平行,为此,需在期望特性的中频段与低频段之间用一斜率为-40 dB/dec 的直线作连接线。
连接线与中频段特性相交的转折频率ω2距C ω不宜太近,否则难于保证系统相角裕度的要求。
现按 10~52CCωωω=的原则 选取75352==ω 为使校正装置不过于复杂,期望特性的高频段与未校正系统特性一致。
由于未校正系统高频段特性的斜率是-60dB/dec ,故期望特性中频段与高频段之间也应有斜率为-40 dB/dec 的直线作为连接线。
用未校正系统的特性L o 减去期望特性,就得到串联校正装置的对数幅频特性Lc,它表明,应在系统中串联相位滞后-超前校正装置。
其传递函数为: ()()()()S T S T S aT S bT S G C 12121111)(++++= 式中:143.071122===ωbT 1.01011==aT b a 1= 由上图可以写出a Klg 20)lg (lg 20lg 20103510=--15.17=∴a 058.0=b 47.22=T 006.01=T 因此,串联滞后-超前校正装置的传递函数为 ()()()()()S S S S S G C 006.0147.211.01143.01++++=校正后系统的开环传递函数为 ()()()()()101.01006.0147.21143.0600)()(0++++==S S S S S S G S G S G C2.2通过MATLAB 绘制出校正后系统的bode 图和校正后系统的单位阶跃响应图分别如:MATALAB 程序为: >> clear>> n1=600;d1=conv(conv([1 0],[0.1 1]),[0.01 1]); >> s1=tf(n1,d1);>> s2=tf([0.143 1],[2.47 1]); >> s3=tf([0.1 1],[0.006 1]); >> sope=s1*s2*s3;>> figure(1);margin(sope);hold on>> figure(2);sys=feedback(sope,1);step(sys) >> [y,t]=step(sys);>> c=dcgain(sys);>> [max_y,k]=max(y);>> tp=t(k)>> max_overshoot=100*(max_y-c)/c>> r1=1;>> while(y(r1)<0.1*c)r1=r1+1;end>> r2=1;>> while(y(r2)<0.9*c)r2=r2+1;end>> tr=t(r2)-t(r1)>> s=length(t);>> while y(s)>0.98*c&&y(s)<1.02*cs=s-1;end>> ts=t(s)>> figure(3);sys=feedback(s1,1);impulse(sys) >> figure(4);step(k*n1,[d1,0])>> ess=1-dcgain(sys)图2-2校正后系统的bode图图2-3校正后系统的单位阶跃响应图图2-4校正后系统的单位脉冲响应图图2-5校正后系统的单位斜坡响应图2.3由图可知校正前系统的频域性能指标如下:幅值裕度h L =16.7dB ; 穿越频率x ω=122/rad s ; 相角裕度r=49.2度; 剪切频率c ω=33.1/rad s 。