云台通讯协议
霸天安云台通讯协议
霸天安云台通讯协议霸天安云台通讯协议1. 概述本协议旨在规范使用霸天安云台通讯协议的相关方之间的权利和义务。
通过遵守本协议,双方将确保合作顺利进行,并维护双方的合法权益。
2. 协议内容本协议包括以下主要内容:•霸天安云台通讯协议的定义和范围•协议的适用范围•双方的权利和义务•协议的生效和终止3. 定义和范围霸天安云台通讯协议定义霸天安云台通讯协议是指由霸天安公司开发并拥有知识产权的通讯协议标准。
该通讯协议用于实现云台设备与其他设备之间的数据交互和通信。
协议适用范围本协议适用于所有使用霸天安云台通讯协议的相关方,包括但不限于设备生产商、软件开发商、系统集成商等。
4. 权利和义务相关方的权利•相关方有权使用霸天安云台通讯协议进行设备间的数据交互和通信。
•相关方有权获得霸天安提供的技术支持和升级服务。
相关方的义务•相关方应遵守霸天安云台通讯协议的标准和规范。
•相关方应保护霸天安云台通讯协议的知识产权,未经授权不得复制、修改或传播该协议。
5. 协议的生效和终止协议的生效本协议自双方正式签署之日起生效,具有法律效力。
协议的终止本协议在以下情况下终止: - 双方协商一致决定终止本协议。
- 发生重大违约行为,违约方应向守约方支付相应违约金。
- 法律法规变化导致协议无法继续履行。
6. 其他条款争议解决本协议的解释和争议解决适用中华人民共和国的相关法律法规。
保密条款双方应对本协议及相关资料进行保密,未经对方书面许可,不得向第三方泄露。
知识产权本协议不转让任何知识产权,双方在协议生效期内仅获得使用权。
免责声明在法律允许的范围内,双方对使用霸天安云台通讯协议所造成的任何直接或间接损失不承担责任。
以上是《霸天安云台通讯协议》的主要内容,双方应在遵守相关法律法规的前提下,按照本协议的约定进行合作。
7. 协议的修改和补充本协议如需进行修改或补充,双方应在书面形式下达成一致意见,并签订补充协议。
8. 不可抗力如因不可抗力事件导致本协议的履行受阻,双方应及时通知对方并商讨解决方案。
亚安云台说明书
-
第一部分 云台介绍
◆ 云台技术指标
一、 云台产品特性 1、 造型新颖,专利设计的走线方式节省了出线长度,保证了出线安全,使出线不会被破坏、磨损。 2、 云台选用永久型重载磁同步电机,具有云台停机保护功能,抗强风,运行平稳可靠。 3、 装有高性能长寿命进口组件变速箱,可加装双侧红外射灯(见图 1)。 4、 通讯协议转换功能:YAAN、Pelco-D、Pelco-P、AD、AB、行协、三星及多种波特率通讯。 5、 最多可设置 50 个预置位(YD 系列无预置位),配合 Computar 镜头,可以实现镜头的预置。 6、 YP 系列使用行业协议时,最多可以设置 5 条线扫路线,编辑 8 条巡航路线;YD 系列仅一条线扫路线, 且线扫边界不可设置靠限位开关控制其左右边界。 7、专 业 设 计 的 外 壳 便 于 拆 卸 、 安 装 、 维 修 。 8、铝合金材料耐高温、耐老化、抗腐蚀、防水、防酸雨。 9、H 型内置自动加热系统,适用于高寒冷地区。
协议 行业协议 V0.0
YAAN Pelco P Pelco D AD /AB
三星 Inter 行业协议 V1.0
1 OFF ON OFF ON OFF OFF ON 地址 9
2 OFF OFF ON ON OFF ON ON 地址 10
3 OFF OFF OFF OFF ON ON ON 地址 11
注意事项…………………………………..……………...1
第一部分 云台的介绍…………………………………... ………….2
云台产品特性………………………..…. ………………2
ID 设置……………………………..…………………….3
功能拨码开关设置…………...………………………….5
回传角度信息方案

云台关于回传角度信息方案一、串口通信协议:a)该云台串口符合RS485或者422(根据客户需要)通信标准;b)该云台串口协议符合PELCO_D的基础和扩展协议;c)串口设置如表一所示;表一:串口设置参数数值通讯速率2400/4800/9600/19200 bps数据位8位校验方式无停止位1位流控制无二、云台控制和回传方案:云台接收的基本控制命令包格式如表二所示:表二:控制命令格式字节1 字节2 字节3 字节4 字节5 字节6 字节7起始字节云台地址命令字1 命令字2 数据1 数据2 结束字节FF add command1 command2 data1 data2 校验码校验码= [(字节2 + 字节3 + 字节4 + 字节5 + 字节6)&&0xff](1)云台水平、俯仰和镜头控制命令数据码data1、data2分别表示水平、垂直方向速度(00-3FH){0xff, add ,0x00,0x08, data1 , data2 , CHKSUM,}//上{0xff, add ,0x00,0x10, data1, data2, CHKSUM ,}//下{0xff, add ,0x00,0x04, data1, data2, CHKSUM,}//左{0xff, add ,0x00,0x02, data1, data2, CHKSUM,}//右{0xff, add,0x00,0x20, 0x00, 0x00,CHKSUM,}//变倍短{0xff, add,0x00,0x40, 0x00, 0x00, CHKSUM,}//变倍长{0xff, add,0x00,0x80, 0x00, 0x00, CHKSUM,}//聚焦近{0xff, add,0x01,0x00, 0x00, 0x00, CHKSUM,}//聚焦远{0xff, add,0x02,0x00, 0x00, 0x00,CHKSUM,}//光圈小{0xff, add,0x04,0x00, 0x00, 0x00, CHKSUM,}//光圈大(2)云台水平、俯仰角度的设置:{0xff, add ,0x00,0x4B,MSB,LSB ,CHKSUM ,}//水平角度设置{0xff, add ,0x00,0x4D,MSB,LSB ,CHKSUM ,}//俯仰角度设置add为云台地址,范围为00-FF,当为水平角度设置时MSB为水平角度高字节,LSB 为水平角度低字节,范围为0000-0E10(0000—36000),注:当云台串口连续接受到上述4条命令的时候,云台可以同时执行上述命令;当云台串口接受到其它符合要求的命令时,云台会自动中断当前命令转向执行新的命令。
YD3040云台配置说明

Pelco D
On
On
Off
Off
鸡西云台设备使用Pelco D协议.
⑷开关5,6用来选择通讯的波特率,通常采用2400的波特率.
波特率
开关5
开关6
2400
Off
Off
2.2地址拨码开关的定义.
地址
1
2
3
4
5
6
7
8
1
On
Off
Off
Off
Off
YA/YD3040台配置说明
1.接线说明
云台控制,摄像头控制,485控制接线图如下.
2.ID设置.
在解码板上有两个8位拨码开关,拨码从左到右依次为1,2,…7,8.左边的拨码开关用来选择功能,右边的8位拨码开关用来选择地址.
2.1功能选择开关的定义.
⑴开关7永远为OFF
⑵开关8为120欧姆终端电阻,使用时将开关8拨到ON
Off
Off
Off
选择地址1与视频服务器的默认相同.
PELCO的D协议通讯协议
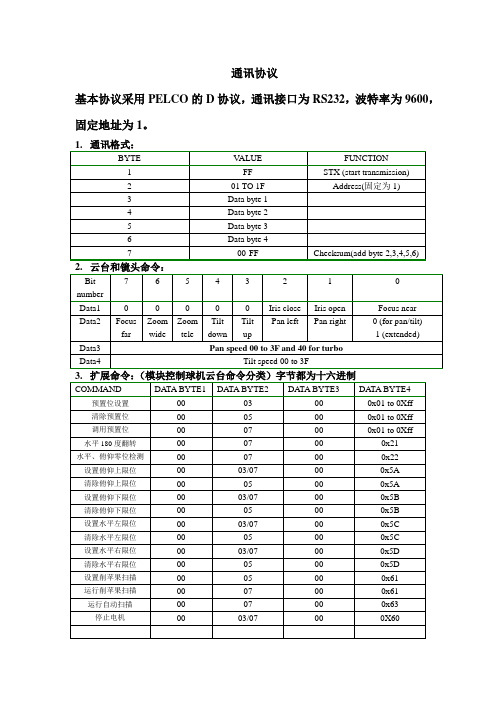
通讯协议
基本协议采用PELCO的D协议,通讯接口为RS232,波特率为9600,固定地址为1。
注:报警协议是云台主动发送报警信息给网络模块的。
1. 触发报警发送0X01.报警撤消发送0X00.
2. 当云台上电5分钟内,每分钟发一次当前的报警信息给网络模块。
之后当有报警信息变化才发送信息给网络模块。
3.数据反馈通讯
4.设置水平位置:水平位置(微步数)=PAN H(24B)<<16+PAN M(16B)<<8+PAN L(8B).
5.设置俯仰位置:俯仰位置(微步数)=TIL H(24B)<<16+TIL M(16B)<<8+TIL L(8B). 注:水平位置与俯仰位置均为微步数。
5. 发送变倍位置
注:如日立SC110相机。
模块发查询变倍指令给相机(:rF7140000)相机反馈命令(如:H’WXYZ )
模块就发命令(FF 01 00 37 WX YZ CHECKSUM)
当云台需要查询变倍时(FF 01 00 65 00 00 66)。
模块也要将变倍位置发下来。
Pelco-P协议

PELCO-P云台控制通信协议数据格式:1位起始位、8位数据、1位停止位,无效验位。
波特率:9600B/S 命令格式:字节1 字节2 字节3 字节4 字节5 字节6 字节7 字节8 STX 地址码指令码1 指令码2 数据码1 数据码2 ETX 校验码1.该协议中所有数值都为十六进制数2.STX始终为A0H3.地址码为摄像机的逻辑地址号,地址范围:00H–1FH4.指令码表示不同的动作5.数据码1、2分别表示水平、垂直方向速度(00-3FH),在有关预制点的操作时,数据码2表示预制点值6.ETX始终为AFH7.校验码(XOR Bytes 2-6) = 字节2 ^ 字节3 ^ 字节4 ^ 字节5 ^ 字节6以地址码0x01为例:{0xa0,0x01,0x00,0x02,0x10,0x00,0xaf,0x13,}//右{0xa0,0x01,0x00,0x04,0x10,0x00,0xaf,0x15,}//左{0xa0,0x01,0x00,0x08,0x00,0x30,0xaf,0x39,}//上{0xa0,0x01,0x00,0x10,0x00,0x30,0xaf,0x21,}//下{0xa0,0x01,0x00,0x20,0x00,0x00,0xaf,0x21,}//变倍长{0xa0,0x01,0x00,0x40,0x00,0x00,0xaf,0x41,}//变倍短{0xa0,0x01,0x01,0x00,0x00,0x00,0xaf,0x00,}//聚焦远{0xa0,0x01,0x02,0x00,0x00,0x00,0xaf,0x03,}//聚焦近{0xa0,0x01,0x04,0x00,0x00,0x00,0xaf,0x05,}//光圈大{0xa0,0x01,0x08,0x00,0x00,0x00,0xaf,0x09,}//光圈小{0xa0,0x01,0x00,0x96,0x00,0x00,0xaf,0x97,}//自动巡航{0xa0,0x01,0x00,0x98,0x00,0x00,0xaf,0x99,}//关闭自动巡航{0xa0,0x01,0x00,0x03,0x00,0x01,0xaf,0x03,}//设置预置点01{0xa0,0x01,0x00,0x05,0x00,0x01,0xaf,0x05,}//删除预置点01{0xa0,0x01,0x00,0x07,0x00,0x01,0xaf,0x07,}//转至预置点01{0xa0,0x01,0x00,0x92,0x00,0x00,0xaf,0x93,}//灯光开{0xa0,0x01,0x00,0x94,0x00,0x00,0xaf,0x95,}//灯光关{0xa0,0x01,0x00,0x9A,0x00,0x00,0xaf,0x9b,}//报警开{0xa0,0x01,0x00,0x9C,0x00,0x00,0xaf,0x9d,}//报警关以上对应的停命令均是(上下左右、变倍、聚焦、光圈均有停命令):{0xa0,0x01,0x00,0x00,0x00,0x00,0xaf,0x01,}注:pelco-p缺省地址码是0。
模拟球机云台通用协议
模拟球机云台通用协议模拟球机云台通用协议甲方(供应商):公司名称:XXXX有限公司公司地址:XXXXXX法定代表人/授权代表人:XXXX联系电话:XXXX电子邮件地址:XXXX乙方(采购商):公司名称:XXXX有限公司公司地址:XXXXXX法定代表人/授权代表人:XXXX联系电话:XXXX电子邮件地址:XXXX双方在平等互利的基础上,达成以下协议:一、协议目的甲方同意向乙方提供模拟球机云台的相关产品及服务,乙方同意采购模拟球机云台,并按协议规定支付相关费用。
二、各方身份、权利、义务、履行方式、期限、违约责任1. 甲方的身份:甲方是模拟球机云台的供应商,有专业的技术团队和服务团队。
2. 乙方的身份:乙方是模拟球机云台的采购商,具有购买和使用模拟球机云台的权利。
3. 甲方的权利:甲方有权收取模拟球机云台的相关费用,并及时提供检修、保养、升级等服务。
4. 乙方的权利:a) 乙方具有选购模拟球机云台的权利,根据自身的需要和要求选择不同的配置和规格。
b) 乙方在购买模拟球机云台后,有权按照约定的方式使用模拟球机云台。
5. 甲方的义务:a) 甲方需要按照约定的标准和质量要求,提供符合性能和质量要求的模拟球机云台。
b) 甲方需要在约定的时间内,按照约定的内容提供模拟球机云台相关的技术支持和服务,保证乙方使用模拟球机云台的顺畅。
6. 乙方的义务:a) 乙方需要满足甲方的相关购买规定和手续,按照约定的费用支付模拟球机云台的相关费用。
b) 乙方需要根据甲方提供的使用、维护等说明,规范使用、保养模拟球机云台。
7. 履行方式:a) 甲方需要在乙方支付相关费用后,按照约定的时间和方式将模拟球机云台及其所需的配件送达乙方。
b) 乙方需要按照约定的时间使用、维护模拟球机云台。
8. 期限:a) 本协议的有效期为XXX年,自协议签订之日起计算。
b) 在本协议规定的期限内,双方为履行协议所承担的义务和责任均持续有效。
9. 违约责任:a) 任何一方违反本协议的规定,均需要对违反行为承担相应的责任和后果。
世林球机云台协议

世林球机云台协议随着科技的不断发展,人们对于监控设备的需求也越来越高。
球机作为一种常见的监控设备,其云台功能的优劣直接影响着用户的使用体验。
为了实现球机云台的高效控制,世林公司提出了世林球机云台协议,该协议旨在提供一种统一的球机云台控制标准,以便不同厂商的球机能够互相兼容,实现更加灵活、便捷的操作。
世林球机云台协议是一种基于网络通信的协议,通过网络连接,用户可以通过电脑、手机等终端设备对球机进行远程控制。
该协议采用了标准的网络传输协议,如TCP/IP协议,确保了数据的可靠传输。
世林球机云台协议定义了一系列控制命令,包括云台的转动、焦距调节、光圈控制等功能。
用户可以通过发送相应的指令来实现对球机的控制。
例如,用户可以发送一个控制指令来使球机向左转动,或者发送一个指令来调整球机的焦距。
通过这些命令,用户可以实现对球机的灵活控制,满足不同场景的需求。
世林球机云台协议还规定了数据的格式和解析方式。
用户在发送控制命令时,需要按照一定的格式进行封装,并在接收端进行相应的解析。
这样可以确保数据的正确传输和解析,避免因数据格式不一致而导致的控制失败。
世林球机云台协议的优点在于其开放性和兼容性。
世林公司将协议的详细规范公开,并提供相应的开发工具和文档,使其他厂商可以根据该协议进行球机的开发和集成。
这样,用户可以在不同厂商的球机之间实现互操作,无需为了使用不同品牌的球机而学习不同的操作方法。
世林球机云台协议还支持第三方应用的集成。
用户可以通过开放的API接口,将球机的控制功能嵌入到自己的应用中。
例如,用户可以在自己的监控系统中添加球机控制的功能模块,实现对球机的集中管理和控制。
总结起来,世林球机云台协议是一种基于网络通信的标准协议,用于实现球机的远程控制。
该协议定义了一系列控制命令和数据格式,保证了球机的高效控制和数据传输。
世林球机云台协议具有开放性和兼容性,可以与不同厂商的球机进行互操作,同时支持第三方应用的集成。
ipc云台原理
ipc云台原理IPC云台原理云台是指在安防监控系统中,用于控制摄像机的转动方向和角度的设备。
IPC云台则是指通过网络连接的云台设备。
IPC云台原理即是通过网络连接的方式,实现对摄像机的远程控制。
IPC云台原理主要包括以下几个方面:1. 网络传输:IPC云台通过网络连接,将摄像机与监控中心进行数据传输。
一般采用的网络传输协议有TCP/IP协议、HTTP协议等。
通过网络传输,可以实现远程控制和监控。
2. 远程控制:利用IPC云台,用户可以通过远程控制方式,对摄像机进行方向和角度的调整。
通过云台的控制面板或者远程控制软件,用户可以实现对摄像机的上下左右的转动,并且可以调整摄像机的焦距和光圈等参数。
3. 云台控制协议:IPC云台与摄像机之间的通信是通过云台控制协议实现的。
常用的云台控制协议有Pelco-D协议、Onvif协议等。
这些协议定义了云台设备与摄像机之间的通信方式和指令格式,保证了设备间的兼容性和互操作性。
4. 云台电机控制:云台设备内部包含有电机控制系统,通过电机控制系统实现对摄像机的转动。
电机控制系统包括电机、驱动器、编码器等组件,通过接收云台控制协议的指令,控制电机的运动,从而实现摄像机的转动。
5. 视频传输:除了控制摄像机的转动,IPC云台还负责将摄像机采集到的视频信号传输给监控中心。
通过网络传输,将视频信号实时传输给监控中心,以便进行实时监控和录像存储。
6. 电源供应:IPC云台设备需要提供电源供应,以保证设备的正常运行。
一般采用直流电源供应方式,通过电源适配器将交流电转换为直流电,为云台设备提供所需的电力。
总结起来,IPC云台原理就是通过网络连接,实现对摄像机的远程控制和视频传输。
通过云台控制协议和云台电机控制系统,实现对摄像机的转动控制。
通过电源供应,为云台设备提供所需的电力。
通过这些原理的结合,实现了监控系统的远程控制和监控功能,为用户提供了更加便捷和灵活的监控解决方案。
485云台控制原理
485云台控制原理
RS 485云台控制原理主要涉及以下几个方面:
1. 控制信号传输:RS 485是一种差分信号传输方式,通过一对双绞线实现数据的发送和接收。
控制信号通过RS 485总线进行传输,常见的控制信号包括云台的旋转、俯仰、偏航等指令。
2. 协议规范:为了实现云台的控制,需要遵循一定的协议规范。
常见的协议规范包括RS 485协议、VISCA协议、PELCO协议等。
这些协议规范规定了控制信号的编码方式、数据格式、波特率等参数,以确保不同设备之间的兼容性和通信稳定性。
3. 控制器与云台连接:控制器是实现云台控制的核心设备,它通过RS 485总线与云台连接。
控制器根据接收到的控制信号,解析并转换为相应的电压或电流信号,驱动云台执行相应的动作。
同时,控制器还负责接收云台的反馈信号,以实现闭环控制。
4. 通信稳定性保障:为了保证RS 485总线的通信稳定性,需要采取一系列措施。
例如,采用双绞线传输差分信号,以抵抗外界干扰;通过终端电阻来消除信号反射;采用合适的波特率和数据格式,以确保数据传输的实时性和准确性;采用冗余设计来提高系统的可靠性等。
总之,RS 485云台控制原理主要涉及控制信号的传输、协议规范的遵循、控制器与云台的连接以及通信稳定性的保障等方面。
通过这些原理的实现,可以实现云台的精确控制和稳定运行,满足各种应用场景的需求。
云台地址码、波特率、协议码

云台地址码、波特率、协议拨码设置说明。
恒速球地址、协议、波特率等设置恒速球内置解码板,通过解码板对地址、协议、波特率的设置,实现对恒速球的云台和摄像机的镜头控制。
1、地址设置8位拨码开关(见下图)的1-6位用于恒速球的地址码设置,可在1~63范围内进行地址编码,每个恒速球的地址码应与硬盘录像机或矩阵或控制键盘的地址码一致,才能实现控制。
用于设置地址码6位拨码开关采用2进制,每位拨至ON时值为1,拨至OFF时值为0,详见表2。
表2:地址编码与拨码开关对应表KODICOM卡硬盘录像机KRE-301协议,上海诚丰硬盘录像机PRLCO-D,RM110协议地址采用16进制,与其它地址采用十进制不同,故地址首先需转换为十进制,拔码开关如表3表3:16进制地址与拨码开关对应表请按自己定义好的恒速球地址,按照表2或表3完成拨码开关的设置。
2、波特率设置8位拨码开关(见上图)的7、8位用于恒速球的地址码设置,可设置的波特率为1200BPS、2400BPS、480 0BPS、9600BPS。
每位拨至ON时值为1,拨至OFF时值为0,波特率与拨码开关对应见表4。
表4:波特率与拨码开关对应表请根据控制恒速球设备所采用的通信波特率按照表4完成拨码开关的设置。
3、协议设置6位拨码开关的1,2,3,4位(见上图)用于设置协议类型,内置解码板提供下表5所列的协议,也可按用户要求将其它写入其它的协议。
表5:拨码开关与协议对应表本解码器通常提供以上14种协议,但可根据用户需要提供更多协议。
可提供协议有:与矩阵通讯协议: SAMSUNG、AD、AB、达拉斯、红苹果、科力矩阵、天大天财矩阵、派尔高矩阵、银信矩阵、LP矩阵。
与硬盘录像机通讯协议:录林王嵌入式、凯创嵌入式、DM嵌入式、海康威视嵌入式、KCL(三洋)、YAAN、SAMSUNG、 KIDICOM-SX硬盘录像机使用协议与波特率参照表见表6。
与键盘通讯协议:维多键盘、PWT键盘、三星键盘、YAAN 。
云台协议怎么设置
云台协议怎么设置1. 引言云台协议是控制云台运动的一种通信协议,通过该协议,用户可以通过特定的指令来控制云台的转动、倾斜等动作。
本文将介绍如何设置云台协议,以及相关注意事项。
2. 设置云台协议的步骤2.1 确定云台型号在设置云台协议之前,首先需要确定使用的云台型号。
不同型号的云台可能使用不同的通信协议,因此需要查阅云台的说明书或者与制造商联系,以确定所使用的云台型号。
2.2 下载并安装云台控制软件根据云台型号,制造商通常会提供相应的控制软件。
用户需要从制造商的官方网站或其他可信渠道下载并安装云台控制软件。
2.3 打开云台控制软件安装完成后,打开云台控制软件。
软件界面通常会提供云台协议的设置选项。
2.4 选择云台协议在云台控制软件的设置选项中,选择合适的云台协议。
通常会提供多种协议供选择,包括标准协议和制造商自有的协议。
用户根据云台型号和需求选择相应的协议。
2.5 设置通信参数根据云台协议的要求,设置通信参数。
这些参数通常包括波特率、数据位、停止位和校验位等。
用户需要根据云台协议和实际情况,正确设置通信参数。
2.6 连接云台通过串口或网络等方式,将电脑与云台进行连接。
确保连接稳定可靠。
2.7 测试云台控制在云台控制软件中,提供测试选项,用户可以通过该选项测试云台控制是否正常。
根据软件的提示,进行相应的操作,观察云台的运动情况。
2.8 调整云台参数根据实际需求,对云台的参数进行调整。
这些参数包括云台的速度、灵敏度、限位等。
根据具体的应用场景,合理设置这些参数,以达到最佳的控制效果。
3. 注意事项在设置云台协议时,有一些注意事项需要用户注意:•确保使用正确的云台型号和相应的控制软件;•仔细阅读云台控制软件的说明文档,了解各个功能的使用方法;•在设置通信参数时,确保与云台的通信参数一致;•在连接云台之前,确认电脑和云台之间的连接方式是否正确;•在测试云台控制时,注意观察云台的运动情况,确保控制正常。
4. 总结通过本文,我们了解了设置云台协议的步骤和注意事项。
云台地址码、波特率、协议码

云台地址码、波特率、协议拨码设置说明恒速球地址、协议、波特率等设置恒速球内置解码板,通过解码板对地址、协议、波特率的设置,实现对恒速球的云台和摄像机的镜头控制。
1、地址设置8位拨码开关(见下图)的1-6位用于恒速球的地址码设置,可在1〜63范围内进行地址编码,每个恒速球的地址码应与硬盘录像机或矩阵或控制键盘的地址码一致,才能实现控制。
用于设置地址码6位拨码开关采用2进制,每位拨至ON时值为1,拨至OFF时值为0,详见表2。
KODICOM卡硬盘录像机KRE-301协议,上海诚丰硬盘录像机PRLCO-D RM110协议地址采用16进制,与其它地址采用十进制不同,故地址首先需转换为十进制,拔码开关如表3表3 : 16进制地址与拨码开关对应表请按自己定义好的恒速球地址,按照表2或表3完成拨码开关的设置。
2、波特率设置8位拨码开关(见上图)的7、8位用于恒速球的地址码设置,可设置的波特率为1200BPS 2400BPS 480 OBPS 9600BPS每位拨至ON时值为1,拨至OFF时值为0,波特率与拨码开关对应见表4。
表4 :波特率与拨码开关对应表请根据控制恒速球设备所采用的通信波特率按照表4完成拨码开关的设置。
3、协议设置6位拨码开关的1 , 2, 3, 4位(见上图)用于设置协议类型,内置解码板提供下表5所列的协议,也可按用户要求将其它写入其它的协议。
表5 :拨码开关与协议对应表本解码器通常提供以上14种协议,但可根据用户需要提供更多协议。
可提供协议有:与矩阵通讯协议:SAMSUNG AD AB达拉斯、红苹果、科力矩阵、天大天财矩阵、派尔高矩阵、银信矩阵、LP矩阵。
与硬盘录像机通讯协议:录林王嵌入式、凯创嵌入式、DM嵌入式、海康威视嵌入式、KCL(三洋)、YAAN SAMSUNG KIDICOM-SX硬盘录像机使用协议与波特率参照表见表6。
与键盘通讯协议:维多键盘、PWT键盘、三星键盘、YAAN。
表6 :硬盘录像机使用协议与波特率参照表请根据控制恒速球的设备(如矩阵、硬盘录像机、键盘)所采用的协议来选择合适的通讯协议。
霸天安云台通讯协议(一)

霸天安云台通讯协议(一)协议模板:针对“霸天安云台通讯”协议标题:霸天安云台通讯合作协议一、协议背景为了进一步促进双方在通讯领域的合作与发展,特制定本合作协议。
二、协议目的本协议旨在规范双方合作关系,确保合作互利共赢,共同发展。
三、合作内容双方在本协议框架内,就以下具体合作事项达成一致:1.霸天安云台通讯的产品线与技术支持–双方将充分利用霸天安云台通讯的产品和技术,共同研发、生产和销售高质量的通讯设备。
–双方将相互交流与分享最新的通讯技术和产品信息,协同努力提高产品质量和性能。
2.市场推广与销售–双方将共同制定市场推广策略,开拓新的市场和客户资源。
–双方将建设有效的销售渠道和网络,提高产品的市场份额和业绩表现。
–双方将共同参与销售活动和展览会议,增强产品的知名度和影响力。
3.售后服务与技术支持–双方将建立健全的售后服务体系,确保客户的满意度和快速解决问题。
–双方将提供互相支持和培训服务,提高双方在技术和服务方面的水平和能力。
4.合作期限和终止条件–本合作协议自双方签署之日起生效,有效期为三年。
–若双方有意终止合作,需提前90天书面通知对方。
四、保密条款双方在合作期间和合作结束后,均应尊重对方的商业机密和技术资料的保密。
五、知识产权双方在合作期间共同创造的知识产权,如专利、商标等,均应平等共享。
六、违约责任若一方违反本协议的任何条款,应承担相应的法律责任。
七、其他条款其他未在本协议中约定的事项,双方可另行协商并签署补充协议。
八、争议解决双方合作过程中的争议,应友好协商解决;如协商不成,应提交至双方所在地的法院诉讼解决。
九、协议生效本协议生效之前,双方需要签署正式的协议文件,并加盖公章。
以上为《霸天安云台通讯合作协议》的协议模板,双方可根据实际情况进行适当修改与调整。
十、协议解释和修订本协议的解释和修订权归双方共同所有,并以书面形式进行。
十一、不可抗力因不可抗力事件(如地震、火灾、战争、罢工等)导致合作无法履行的,双方不承担责任。
监控 云台 协议
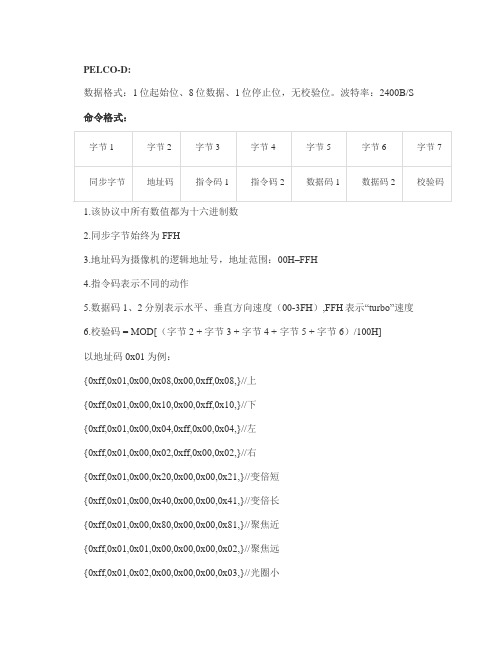
PELCO-D:数据格式:1位起始位、8位数据、1位停止位,无校验位。
波特率:2400B/S 命令格式:1.该协议中所有数值都为十六进制数2.同步字节始终为FFH3.地址码为摄像机的逻辑地址号,地址范围:00H–FFH4.指令码表示不同的动作5.数据码1、2分别表示水平、垂直方向速度(00-3FH),FFH表示“turbo”速度6.校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]以地址码0x01为例:{0xff,0x01,0x00,0x08,0x00,0xff,0x08,}//上{0xff,0x01,0x00,0x10,0x00,0xff,0x10,}//下{0xff,0x01,0x00,0x04,0xff,0x00,0x04,}//左{0xff,0x01,0x00,0x02,0xff,0x00,0x02,}//右{0xff,0x01,0x00,0x20,0x00,0x00,0x21,}//变倍短{0xff,0x01,0x00,0x40,0x00,0x00,0x41,}//变倍长{0xff,0x01,0x00,0x80,0x00,0x00,0x81,}//聚焦近{0xff,0x01,0x01,0x00,0x00,0x00,0x02,}//聚焦远{0xff,0x01,0x02,0x00,0x00,0x00,0x03,}//光圈小{0xff,0x01,0x04,0x00,0x00,0x00,0x05,}//光圈大{0xff,0x01,0x00,0x0b,0x00,0x01,0x0d,}//灯光关{0xff,0x01,0x00,0x09,0x00,0x01,0x0b,}//灯光开{0xff,0x01,0x00,0x07,0x00,0x01,0x09,}//转至预置点001{0xff,0x01,0x00,0x03,0x00,0x01,0x05,}//设置预置点001{0xff,0x01,0x00,0x05,0x00,0x01,0x07,}//删除预置点001以上对应的停命令均是:{0xff,0x01,0x00,0x00,0x00,0x00,0x01,}//停命令PELCO-P:数据格式:1位起始位、8位数据、1位停止位,无校验位。
各球机、球型云台及各解码器的地址、协议、波特率设置
各球机、球型云台及各解码器的地址、协议、波特率设置内部资料仅供技术交流与学习之用各球机、球型云台及各解码器的地址、协议、波特率设置一、彩转黑高速球设置 CSD-85/85B CS-85/85B 1、取下球罩,2、取出机芯,先下压~再左右转动,,3、在机芯背面有拨码开关进行拨码。
本拨码开关~拨到上有效“1”~否则无效~1位为地位~10位为高位。
SW1为地址开关,SW21—4为协议开关~5、6为波特率。
PELCD-D(????) PELCD-P(????) 2400(??) 4800,??, 9600,??,例:PELCD-D 2400, 地址:1ON sw1 ON sw21 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6二、彩转黑中速球设置 KD-8006A/AS,新版本,8006A:1、取下玻璃球罩,2、取下内衬黑罩,3、在一侧有拨码开关进行设置。
8006AS:1、将安装盘左右转动取下,2、在机芯后面有拨码开关进行拨码。
本拨码开关~拨到上有效“1”~否则无效~1位为地位~10位为高位。
sw1,1—10,为地址开关,sw2为协议,1—4,、波特率开关,5、6,。
PELCD-D(????) PELCD-P(????) 2400(??) 4800,??, 9600,??,例: PELCD-D 2400,地址: 10ON sw1 ON sw21 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6更改:8006A,老版本,1、取下玻璃球罩,2、取下内衬黑罩,3、在一侧有拨码开关进行设置。
本拨码开关~拨到上有效“1”~否则无效~1位为地位~10位为高位。
sw1,1—10,为地址开关,sw2为协议,1—4,、波特率开关,5、6,。
PELCD-D(????) PELCD-P(????) 2400(??) 4800,??, 9600,??, 三、红外高中速球设置 KD-8007H/A/T/C 1、在球机一侧有一长条盖板~并拧掉螺丝取下盖板,2、进行拨码:本拨码开关~拨到上有效“1”~否则无效~1位为地位~8位为高位~9-10位备用。
云台通信协议ProtocolD
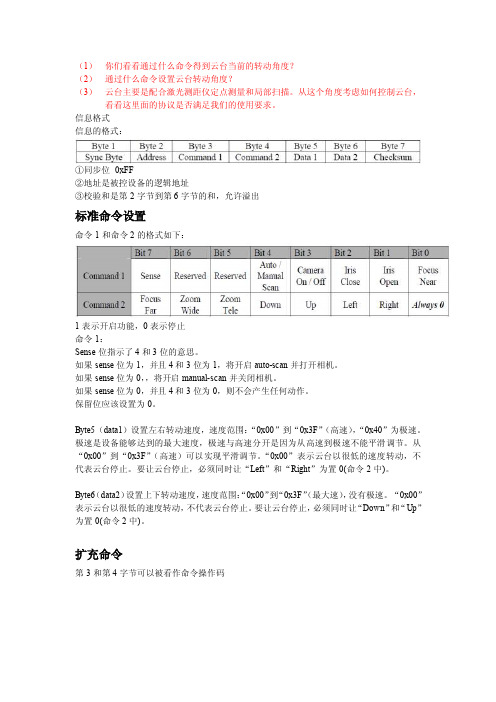
(1)你们看看通过什么命令得到云台当前的转动角度?
(2)通过什么命令设置云台转动角度?
(3)云台主要是配合激光测距仪定点测量和局部扫描。
从这个角度考虑如何控制云台,看看这里面的协议是否满足我们的使用要求。
信息格式
信息的格式:
①同步位0xFF
②地址是被控设备的逻辑地址
③校验和是第2字节到第6字节的和,允许溢出
标准命令设置
命令1和命令2的格式如下:
1表示开启功能,0表示停止
命令1:
Sense位指示了4和3位的意思。
如果sense位为1,并且4和3位为1,将开启auto-scan并打开相机。
如果sense位为0,,将开启manual-scan并关闭相机。
如果sense位为0,并且4和3位为0,则不会产生任何动作。
保留位应该设置为0。
Byte5(data1)设置左右转动速度,速度范围:“0x00”到“0x3F”(高速),“0x40”为极速。
极速是设备能够达到的最大速度,极速与高速分开是因为从高速到极速不能平滑调节。
从“0x00”到“0x3F”(高速)可以实现平滑调节。
“0x00”表示云台以很低的速度转动,不代表云台停止。
要让云台停止,必须同时让“Left”和“Right”为置0(命令2中)。
Byte6(data2)设置上下转动速度,速度范围:“0x00”到“0x3F”(最大速),没有极速。
“0x00”表示云台以很低的速度转动,不代表云台停止。
要让云台停止,必须同时让“Down”和“Up”为置0(命令2中)。
扩充命令
第3和第4字节可以被看作命令操作码。
云台协议书
云台协议书甲方(委托方):_____________________乙方(服务方):_____________________鉴于甲方因业务需要,拟委托乙方提供云台服务,经双方协商一致,特订立本协议,以资共同遵守。
第一条服务内容1.1 乙方同意根据甲方的要求,提供云台服务,包括但不限于云存储、云计算、云数据库等。
1.2 乙方应保证所提供的云台服务符合国家相关法律法规及行业标准。
第二条服务期限2.1 本协议自____年____月____日起至____年____月____日止,有效期为____年。
2.2 如甲方需要延长服务期限,应在服务期限届满前____个月向乙方提出书面申请,经乙方同意后,双方可签订补充协议。
第三条服务费用及支付方式3.1 甲方应按照本协议附件一《服务费用明细表》支付乙方服务费用。
3.2 甲方应在本协议生效后____个工作日内支付首期服务费用,后续服务费用按照《服务费用明细表》约定的时间和金额支付。
3.3 乙方在收到甲方支付的服务费用后,应向甲方开具相应的正式发票。
第四条双方权利与义务4.1 甲方权利与义务:4.1.1 甲方有权监督乙方提供的云台服务,确保服务质量。
4.1.2 甲方应按时支付服务费用,并提供必要的业务信息和技术支持。
4.2 乙方权利与义务:4.2.1 乙方有权按照协议约定收取服务费用。
4.2.2 乙方应保证所提供的云台服务的稳定性、安全性,并在服务过程中及时响应甲方的需求。
第五条数据安全与保密5.1 乙方应采取必要措施确保甲方数据的安全,防止数据丢失、泄露或被非法访问。
5.2 双方应对在合作过程中知悉的对方商业秘密予以保密,未经对方书面同意,不得向第三方披露。
第六条违约责任6.1 如一方违反本协议约定,应承担违约责任,并赔偿对方因此遭受的损失。
6.2 因不可抗力导致无法履行或延迟履行协议的,双方互不承担违约责任。
第七条争议解决7.1 本协议在履行过程中如发生争议,双方应首先通过友好协商解决。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
竭诚为您提供优质文档/双击可除
云台通讯协议
篇一:几种云台控制协议
pelco产品协议解析
pelco(派尔高)的监控器材在我国有很广泛的应用。
pelco有自己的传输控制协议,当它的产品配套使用时,可以互相兼容。
但在某些情况下,由于工程的需要,要求用其它设备(比如电脑)来控制pelco的矩阵或镜头,这就要求充分了解pelco的传输协议。
诶诺基数码科技有限公司的视频解码软件可完全兼容pelco协议,可通过pc机控制pelco的各种设备。
本文为你详细解析pelco常用协议之一:pelco-d协议pelco-d协议
pelco-d协议一般用于矩阵和其它设备之间的通信。
它的格式如下:
所有的值都是用的16进制表示。
同步字通常都是$FF。
地址码是指与矩阵通信的那台设备的逻辑地址,可以在
设备中设置。
命令字1和命令字2设置如下:
sence码与bit4和bit3有关。
在bit4和bit3为1的情况下,如果sence码为1,则命令就是自动扫描和和摄像机打开;如果sence码为0,则命令就是手动扫描和摄像机关闭。
当然如果bit4或bit3为0的话那命令就无效了。
数据1表示镜头左右平移的速度,数值从$00(停止)到$3F(高速),另外还有一个值是$FF,表示最高速。
数据2表示镜头上下移动的速度,数值从$00(停止)到$3F(最高速)。
校验码是指byte2到byte6这5个数的和(若超过255
则除以256然后取余数)。
pelco-d&pelco-p协议格式
高速球的设置主要包括协议的选择和消息的发送。
高速球的型号是:tmd-scs18dn使用的协议有:bo1,alec,pelco -9600,pelco-4800,pelco-2400,ao1,
santach1650,peaRmain,kony19.2kbkony20.832,hd600,lil in,kalatel,Vcl,tota,wj-Fs616,philips,ad.厂家设置的
是pelco-2400.该协议的具体内容如下:
pelco-d协议一般用于矩阵和其它设备之间的通信。
它的格式如下:
同步字通常都是$FF。
地址码是指与矩阵通信的那台设备的逻辑地址,可以在
设备中设置。
是自动扫描和和摄像机打开;如果sence码为0,则命令就是手动扫描和摄像机关闭。
当然如果bit4或bit3为0的话那命令就无效了。
数据1表示镜头左右平移的速度,数值从$00(停止)到$3F(高速),另外还有一个值是$FF,表示最高速。
数据2表示镜头上下移动的速度,数值从$00(停止
)到$3F(最高速)。
校验码是指byte2到byte6这5个数的和(若超过255则除以256然后取余数)。
pelco
-p协议
pelco-p协议一般采用Rs-485传输,波特率为4800,1位起始位和停止位,8地址码是设备的逻辑地址,可由接收设备上的dip开关来设定。
校验码是byte2到byte6这5个数的异或值(xoR)。
地址码是从0编起的,所以地址码$00表示第一台设备。
pelco-d和pelco-p协议另有一些特殊命令,可对设备进行一些高级控制,extendedcommands:
inadditiontothe“ptz”
commandsshownabove,therearecontrolcommandsthatallow youaccesstothemoreadvanced
featuresofsomeequipment.theresponsetooneofthesecomm andsisfourbyteslong.thefirstbyteisthesynchronizatio n
character(FF),thesecondbyteisthereceiveraddress,the thirdbytecontainsthealarminformationandthefourthbyt eisthechecksum.ptz命令控制说明:
⒈当控制云台水平、上下方向动作或“iRis”、“Focus”、“zoom”时需要使相应的控制位为“1”,不用控制的相应位置为“0”
⒉当需要云台pan/tilt两方向同时动作时,只需将
pan/tilt的相应控制位置“1”即可,pan/tilt的速度控制由woRd5/woRd6决定
⒊将woRd3、woRd4的所有位置为“0”可以停止云台的动作5、扩充命令
(
(
(
(
(
篇二:云台控制协议一览表
主机云台控制协议一览表
1、RV800科立解码器通讯协议
2、tota120tota解码器通讯协议
3、s1601三乐协议
4、clt-168保千里的协议
5、td-500保千里高速球通讯协议
6、V1200银信V1200解码器、银信矩阵通讯协议
7、zion锡安数码cbR2400
8、ant中晖协议
9、cbc日本cbc高速球通讯协议
10、cs850a松下cs850a高速球通讯协议
11、concoRd2000b、维多b01及美国concord智能快球通讯协议
12、hd600ccVe闭路监控系统通讯协议
13、samsung三星641-643高速球通讯协议
14、yaan亚安高速球控制协议
15、pih利凌pih717解码器通讯协议
16、mg-cs160明景b01通讯协议
17、wisdomwisdom解码器通讯协议
18、pelcod1派尔高公司d通讯协议(四种)
19、pelcod2
20、pelcod3
21、pelcod4。