高中数学选修4-4知识点(最全版)
【精编】高中数学选修4-4知识点清单
高中数学选修44坐标系与参数方程知识点总结第一讲一平面直角坐标系1.平面直角坐标系(1)数轴:规定了原点,正方向和单位长度的直线叫数轴.数轴上的点与实数之间可以建立一一对应关系.(2)平面直角坐标系:①定义:在同一个平面上互相垂直且有公共原点的两条数轴构成平面直角坐标系,简称为直角坐标系;②数轴的正方向:两条数轴分别置于水平位置与竖直位置,取向右与向上的方向分别为两条数轴的正方向;③坐标轴水平的数轴叫做x轴或横坐标轴,竖直的数轴叫做y轴或纵坐标轴,x轴或y 轴统称为坐标轴;④坐标原点:它们的公共原点称为直角坐标系的原点;⑤对应关系:平面直角坐标系上的点与有序实数对(x,y)之间可以建立一一对应关系.(3)距离公式与中点坐标公式:设平面直角坐标系中,点P1(x1,y1),P2(x2,y2),线段P1P2的中点为P,填表:2.设点P(x,y)是平面直角坐标系中的任意一点,在变换φ点P(x,y)对应到点P′(x′,y′),称φ为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.二极坐标系(1)定义:在平面内取一个定点O,叫做极点;自极点O引一条射线Ox叫做极轴;再选定一个长度单位、一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.(2)极坐标系的四个要素:①极点;②极轴;③长度单位;④角度单位及它的方向.(3)图示2.极坐标(1)极坐标的定义:设M是平面内一点,极点O与点M的距离|OM|叫做点M的极径,记为ρ;以极轴Ox为始边,射线OM为终边的角xOM叫做点M的极角,记为θ.有序数对(ρ,θ)叫做点M的极坐标,记作M(ρ,θ).(2)极坐标系中的点与它的极坐标的对应关系:在极坐标系中,极点O的极坐标是(0,θ),(θ∈R),若点M的极坐标是M(ρ,θ),则点M的极坐标也可写成M(ρ,θ+2kπ),(k∈Z).若规定ρ>0,0≤θ<2π,则除极点外极坐标系内的点与有序数对(ρ,θ)之间才是一一对应关系.3.极坐标与直角坐标的互化公式如图所示,把直角坐标系的原点作为极点,x轴的正半轴作为极轴,且长度单位相同,设任意一点M的直角坐标与极坐标分别为(x,y),(ρ,θ).(1)极坐标化直角坐标=ρcosθ,=ρsinθW.(2)直角坐标化极坐标2=x2+y2,θ=yx(x≠0).三简单曲线的极坐标方程1.曲线的极坐标方程一般地,在极坐标系中,如果平面曲线C上任意一点的极坐标中至少有一个满足方程f(ρ,θ)=0,并且坐标适合方程f(ρ,θ)=0的点都在曲线C上,那么方程f(ρ,θ)=0叫做曲线C的极坐标方程.2.圆的极坐标方程(1)特殊情形如下表:圆心位置极坐标方程图形圆心在极点(0,0)ρ=r (0≤θ<2π)圆心在点(r ,0)ρ=2r cos_θ(-π2≤θ<π2)圆心在点(r ,π2)ρ=2r sin_θ(0≤θ<π)圆心在点(r ,π)ρ=-2r cos_θ(π2≤θ<3π2)圆心在点(r ,3π2)ρ=-2r sin_θ(-π<θ≤0)(2)一般情形:设圆心C (ρ0,θ0),半径为r ,M (ρ,θ)为圆上任意一点,则|CM |=r ,∠COM =|θ-θ0|,根据余弦定理可得圆C 的极坐标方程为ρ2-2ρ0ρcos(θ-θ0)+ρ20-r 2=0即)cos(2002022θθρρρρ--+=r 3.直线的极坐标方程00△OPM 中利用正弦定理可得直线l 的极坐标方程为ρsin(α-θ)=ρ0sin(α-θ0).四柱坐标系与球坐标系简介(了解)1.柱坐标系(1)定义:一般地,如图建立空间直角坐标系Oxyz .设P 是空间任意一点,它在Oxy 平面上的射影为Q ,用(ρ,θ)(ρ≥0,0≤θ<2π)表示点Q 在平面Oxy 上的极坐标,这时点P 的位置可用有序数组(ρ,θ,z )(z ∈R )表示.这样,我们建立了空间的点与有序数组(ρ,θ,z )之间的一种对应关系.把建立上述对应关系的坐标系叫做柱坐标系,有序数组(ρ,θ,z )叫做点P 的柱坐标,记作P (ρ,θ,z ),其中ρ≥0,0≤θ<2π,z ∈R .(2)空间点P 的直角坐标(x ,y ,z )与柱坐标(ρ,θ,z )x =ρcos θy =ρsin θz =z.2.球坐标系(1)定义:一般地,如图建立空间直角坐标系Oxyz .设P 是空间任意一点,连接OP ,记|OP |=r ,OP 与Oz 轴正向所夹的角为φ,设P 在Oxy 平面上的射影为Q ,Ox 轴按逆时针方向旋转到OQ 时所转过的最小正角为θ,这样点P 的位置就可以用有序数组(r ,φ,θ)表示,这样,空间的点与有序数组(r ,φ,θ)之间建立了一种对应关系.把建立上述对应关系的坐标系叫做球坐标系(或空间极坐标系),有序数组(r ,φ,θ),叫做点P 的球坐标,记作P (r ,φ,θ),其中r ≥0,0≤φ≤π,0≤θ<2π.(2)空间点P 的直角坐标(x ,y ,z )与球坐标(r ,φ,θ)之间x =r sin φcos θy =r sin φsin θz =r cos φ.第二讲:一曲线的参数方程1.参数方程的概念1.参数方程的概念(1)定义:一般地,在平面直角坐标系中,如果曲线上任意一点的坐标x ,y 都是某个变数t 的函数:=f (t )=g (t )①,并且对于t 的每一个允许值,由方程组①所确定的点M (x ,y )都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数x ,y 的变数t 叫做参变数,简称参数.相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.(2)参数的意义:参数是联系变数x ,y 的桥梁,可以是有物理意义或几何意义的变数,也可以是没有明显实际意义的变数.2.参数方程与普通方程的区别与联系(1)区别:普通方程F (x ,y )=0,直接给出了曲线上点的坐标x ,y 之间的关系,它含有x ,y =f (t )=g (t )(t 为参数)间接给出了曲线上点的坐标x ,y 之间的关系,它含有三个变量t ,x ,y ,其中x 和y 都是参数t 的函数.(2)联系:普通方程中自变量有一个,而且给定其中任意一个变量的值,可以确定另一个变量的值;参数方程中自变量也只有一个,而且给定参数t 的一个值,就可以求出唯一对应的x ,y 的值.这两种方程之间可以进行互化,通过消去参数可以把参数方程化为普通方程,而通过引入参数,也可把普通方程化为参数方程.2.圆的参数方程1.圆心在坐标原点,半径为r 的圆的参数方程如图圆O 与x 轴正半轴交点M 0(r ,0).(1)设M (x ,y )为圆O 上任一点,以OM 为终边的角设为θ,则以θ为参数的圆O 的参数其中参数θ的几何意义是OM 0绕O 点逆时针旋转到OM 的位置时转过的角度.(2)设动点M 在圆上从M 0点开始逆时针旋转作匀速圆周运动,角速度为ω,则OM 0经过时间t 转过的角θ=ωt ,则以t 为参数的圆O 其中参数t 的物理意义是质点做匀速圆周运动的时间.2.圆心为C (a ,b ),半径为r 的圆的参数方程圆心为(a ,b ),半径为r 的圆的参数方程可以看成将圆心在原点,半径为r 的圆通过坐3.参数方程和普通方程的互化曲线的参数方程和普通方程的互化(1)曲线的参数方程和普通方程是在同一平面直角坐标系中表示曲线的方程的两种不同形式,两种方程是等价的可以互相转化.(2)将曲线的参数方程化为普通方程,有利于识别曲线的类型.参数方程通过消去参数就可得到普通方程.(3)普通方程化参数方程,首先确定变数x ,y 中的一个与参数t 的关系,例如x =f (t ),其次将x =f (t )代入普通方程解出y =g (t )(4)在参数方程与普通方程的互化中,必须使x ,y 的取值范围保持一致.二圆锥曲线的参数方程1.椭圆的参数方程椭圆的参数方程(1)中心在原点,焦点在x 轴上的椭圆x 2a 2+y 2b 2=1(a >b >0)φ是参数),规定参数φ的取值范围是[0,2π).(2)中心在原点,焦点在y 轴上的椭圆y 2a 2+x 2b 2=1(a >b >0)φ是参数),规定参数φ的取值范围是[0,2π).(3)中心在(h ,k )的椭圆普通方程为(x -h )2a 2+(y -k )2b 2=1,则其参数方程为φ是参数).2.双曲线的参数方程和抛物线的参数方程1.双曲线的参数方程(1)中心在原点,焦点在x 轴上的双曲线x 2a 2-y 2b 2=1规定参数φ的取值范围为φ∈[0,2π)且φ≠π2,φ≠3π2.(2)中心在原点,焦点在y 轴上的双曲线y 2a 2-x 2b 2=12.抛物线的参数方程(1)抛物线y 2=2px (2)参数t 的几何意义是抛物线上除顶点外的任意一点与原点连线的斜率的倒数.三直线的参数方程1.直线的参数方程经过点M 0(x 0,y 0),倾斜角为α的直线l t 为参数).2.直线的参数方程中参数t 的几何意义(1)参数t 的绝对值表示参数t 所对应的点M 到定点M 0的距离.(2)当M 0M →与e (直线的单位方向向量)同向时,t 取正数.当M 0M →与e 反向时,t 取负数,当M 与M 0重合时,t =0.3.直线参数方程的其他形式对于同一条直线的普通方程,选取的参数不同,会得到不同的参数方程.我们把过点M 0(x 0,y 0),倾斜角为α的直线,选取参数t =M 0M =x 0+t cos α=y 0+t sin α(t 为参数)称为直线参数方程的标准形式,此时的参数t 有明确的几何意义.一般地,过点M 0(x 0,y 0),斜率k =ba (a ,b 为常数)=x 0+at =y 0+bt(t 为参数),称为直线参数方程的一般形式,此时的参数t 不具有标准式中参数的几何意义.四渐开线与摆线(了解)1.渐开线的概念及参数方程(1)渐开线的产生过程及定义把一条没有弹性的细绳绕在一个圆盘上,在绳的外端系上一支铅笔,将绳子拉紧,保持绳子与圆相切,逐渐展开,铅笔画出的曲线叫做圆的渐开线,相应的定圆叫做渐开线的基圆.(2)圆的渐开线的参数方程以基圆圆心O 为原点,直线OA 为x 轴,建立如图所示的平面直角坐标系.设基圆的半径为r ,绳子外端M 的坐标为(x ,y )φ是参数).这就是圆的渐开线的参数方程.2.摆线的概念及参数方程(1)摆线的产生过程及定义平面内,一个动圆沿着一条定直线无滑动地滚动时圆周上一个固定点所经过的轨迹,叫做平摆线,简称摆线,又叫旋轮线.(2)半径为r的圆所产生摆线的参数方程为φ是参数).。
人教版高中数学选修4-4 第一讲 坐标系 二 极坐标系 (共34张PPT)教育课件

A. y 1
sin t
1
x t2
C.
1
yt 2
x cos t
B. y 1
cos t
x tan t
D. y 1
tan t
7.极坐标方程
2
arcsin化(为 直0)角坐标方程的形
式是 ( )
A. x2 y2 x 0
B.y x(1 x)
C. 2x 1 4y2 1 D..y (x 1)
2.极坐标(,)与(ρ,2kπ+θ)( k )表z 示 同一个点.即一点的极坐标的统一的表达式 为(ρ,2kπ+θ)
3.如果规定ρ>0,0≤θ<2π,那么除 极 点外,平面内的点和极坐标就可以一一对 应了。
我们学了直角坐标,也学了极坐 标,那么这两种坐标有什么关系呢? 已知点的直角坐标为,如何用极坐标 表示这个点呢?
M (, )
0
x
2
4
5
6
C
1.如图,在极坐标系中,写出点 AF(,6B, ,4C3 ,)D的, G极(坐5, 标53,所) 并在标的出位E置( 72 , ) ,
E D BA
O
X
4 F
3
G 5
3
解:如图可得A,B,C,D的坐标分别为
(4,0)
(2, )
(3, )
(1, 5 )
4
2
6
点E,F,G的位置如图所示
1
4.极坐标方程ρ=cosθ与ρcosθ= 的2 图形是( ) B
A
B
C
D
解x=:12把,ρc故os排θ=除A,、12 化D;为又直圆角ρ坐=c程os,θ显得然: 过点 (0,1),又排除C,故选B。
5、若A、B的两点极坐标为A(4,
高中数学选修4-4 2.2.4 椭圆的参数方程 课件 (人教A版选修4-4)
例1、在椭圆 x2 y2 1上求一点M,使点M到 94
直线x 2y 10 0的距离最小,并求出最小距离
解:因为椭圆的参数方程为{x 3cos (为参数) y 2sin
所以可设点M (3cos,2sin)
由点到直线的距离公式,得到点M到直线的距离
x {
a
c
os
(为参数)
y b sin
这是中心在原点O,焦点在x轴上的椭圆。
在椭圆的参数方程中,通常规定参数的 范围是 [0,2 )
思考:
椭圆的参数方程中参数的意义与圆的参数方 程{x r cos (为参数)中参数的意义类似吗?
y r sin
由图可以看出,参数是点M所对应的圆的半
径OA(或OB)的旋转角(称为点M的离心角),不
3 c os0
9 ,2sin
5
2sin 0
8 5
所以,当点M位于(9 , 8)时,点M与直线 55
x 2 y 10 0的距离取最小值 5。
思考: 与简单的线性规划问题进行类比,你能在实数
x, y满足 x2 y2 1的前提下,求出z x 2 y的 25 16
最大值和最小值吗?由此可以提出哪些类似的 问题?
3cos 4sin 10
d 5
5(cos 3 sin 4) 10
5
5
5
1 5
5 c os (
0 ) 10
5(cos 3 sin 4) 10
5
5
5
1 5
5 cos(
0 ) 10
其中0满足 c os0
3 5
,
sin
0
4 5
由三角函数性质知,当-0=0时,d取最小值 5
高中数学知识点总结选修4

高中数学知识点总结选修4一、函数与方程函数是高中数学中的核心概念之一,它描述了两个变量之间的依赖关系。
在选修4中,我们主要学习了以下几种函数:1. 指数函数:形如y=a^x的函数,其中a是正实数且a≠1。
指数函数的图像是单调的,当a>1时,函数是增长的;当0<a<1时,函数是衰减的。
2. 对数函数:形如y=log_a(x)的函数,其中a是正实数且a≠1。
对数函数与指数函数互为反函数,其图像也是单调的,但与指数函数的单调性相反。
3. 三角函数:包括正弦函数sin(x)、余弦函数cos(x)、正切函数tan(x)等。
这些函数在解决与角度和三角形有关的问题时非常重要。
4. 函数的运算:包括函数的四则运算、复合函数、反函数等。
这些运算规则帮助我们理解和变换函数。
方程是数学中另一个重要的概念,它描述了变量之间的相等关系。
在选修4中,我们学习了解一元二次方程、指数方程、对数方程等。
二、数列与数学归纳法数列是由按照一定顺序排列的数构成的,它可以是有限个数,也可以是无限个数。
在选修4中,我们主要学习了等差数列和等比数列。
1. 等差数列:每一项与前一项的差是常数的数列。
等差数列的通项公式和求和公式是解决相关问题的关键。
2. 等比数列:每一项与前一项的比是常数的数列。
等比数列的通项公式和求和公式同样非常重要。
数学归纳法是一种证明方法,它通过证明基础情况和归纳步骤来证明与自然数相关的命题。
数学归纳法在证明数列的性质时非常有用。
三、解析几何解析几何是研究几何图形的代数性质的数学分支。
在选修4中,我们学习了以下几个重要的主题:1. 直线与圆的方程:通过代数方程来描述直线和圆的位置关系,包括相交、相切和平行。
2. 圆锥曲线:包括椭圆、双曲线和抛物线。
这些曲线的方程和性质在解决实际问题时非常有用。
3. 参数方程与极坐标:这些是描述几何图形的另外两种方法,它们在某些情况下比直角坐标系更为方便。
四、概率与统计概率论是研究随机事件的数学分支,而统计学则是收集、分析、解释和呈现数据的科学。
人教版高中数学选修4-4课件:第一讲二极坐标

4.写出下图中各点的极坐标:
A________,B________,C________. 答案:(4,0) 2,π4 3,π2
5.极坐标系中,与点3,-π3关于极轴所在直线对 称的点的极坐标是________.
答案:3,π3
类型 1 极坐标系与点的极坐标(自主研析) [典例 1] (1)写出下图中各点的极坐标(ρ>0,0≤ θ<2π,且各线之间间距相等).
法二 将点 A 化为直角坐标为( 3,1),点 B 化为直 角坐标为( 3,-1).所以 A、B 两点间的距离
d= ( 3- 3)2+[1-(-1)]2=2. (2)如下图所示:
关于极轴的对称点为 B2,-π3. 关于直线 l 的对称点为 C2,23π. 关于极点 O 的对称点为 D2,-23π.
归纳升华 1.点(ρ,θ)关于极轴的对称点是(ρ,-θ)或(ρ,2π- θ),关于极点的对称点是(ρ,π+θ),关于过极点且垂直 于极轴的直线的对称点是(ρ,π-θ).
2.求极坐标系中两点间的距离应通过由这两点和极 点 O 构成的三角形求解,也可以运用两点间距离公式|AB| = ρ21+ρ22-2ρ1ρ2cos(θ1-θ2)求解,其中 A(ρ1,θ1), B(ρ2,θ2).注意当 θ1+θ2=2kπ(k∈Z)时,|AB|=|ρ1-ρ2|; 当 θ1+θ2=2kπ+π(k∈Z)时,|AB|=|ρ1+ρ2|.
2.点的极坐标
一般地,极坐标(ρ,θ)与(ρ,θ+2kπ)(k∈Z)表示同一 个点.特别地,极点 O 的坐标为(0,θ)(θ∈R).和直角坐 标不同,平面内一个点的极坐标有无数种表示方法.
如果规定 ρ>0,0≤θ<2π,那么除极点外,平面内的 点可用唯一的极坐标(ρ,θ)表示;同时,极坐标(ρ,θ)表 示的点也是唯一确定的.
高三数学选修4_4知识点
高三数学选修4_4知识点在高三的数学学科中,选修4_4是一个重要的知识点。
下面将介绍选修4_4的主要内容及其相关应用。
一、排列组合排列组合是高中数学中的一个基础概念,也是选修4_4的核心内容之一。
排列指的是从一组元素中选取若干个进行有序排列,而组合则是从一组元素中选取若干个进行无序组合。
排列组合的计算方法主要包括阶乘、排列数和组合数。
1.1 阶乘阶乘是指自然数从1连乘到该数的乘积,用符号"!"表示。
阶乘在排列组合中起到了非常重要的作用,常用于计算排列数和组合数。
1.2 排列数排列数是指从一组元素中选取若干个进行有序排列的方法数,用符号"An"表示。
根据排列数的计算公式可知,An=n!/(n-m)!,其中n表示元素个数,m表示选取的个数。
1.3 组合数组合数是指从一组元素中选取若干个进行无序组合的方法数,用符号"Cn"表示。
组合数的计算公式为Cn=n!/(m!(n-m)!),其中n 表示元素个数,m表示选取的个数。
二、二项式定理二项式定理是选修4_4的另一个重要内容。
它用于展开一个任意指数幂的二项式式子,并且提供了一个快速计算的方法。
二项式定理的表达式为(a+b)^n,其中a和b为实数,n为自然数。
二项式定理的展开式可以用组合数进行求解,展开后的式子包括n+1项。
三、贝叶斯定理贝叶斯定理是选修4_4的进阶内容,它是概率论中一个重要的定理,由于其在实际问题中的广泛应用而备受关注。
贝叶斯定理描述了在已知相关先验信息和观测数据的情况下,如何更新对该事件的概率估计。
贝叶斯定理的公式为P(A|B)=P(B|A)*P(A)/P(B),其中P(A|B)表示在事件B发生的情况下事件A发生的概率。
四、应用领域选修4_4的知识点在实际问题中有广泛的应用。
在组合数学、概率论、统计学等学科中,排列组合和贝叶斯定理是解决问题的重要工具。
在计算机科学中,排列组合常被用于算法设计和数据结构的研究中。
人教A版高中数学选修4-4课件 极坐标系的概念(人教A 版)

[3]一点的极坐标有否统一的表达式?
有。(ρ,2kπ+θ)
1、极坐标系的建立:
在平面内取一个定点O,叫做极点. 引一条射线OX,叫做极轴。 再选定一个长度单位和计算角度的正方向。 (通常取逆时针方向).
O X
这样就建立了一个极坐标系.
2、极坐标系内一点的极坐标的规定
人民教育出版社 高中/选修4-4
对于平面上任意一点M,用表示线段OM的长度, 用表示以射线OX为始边,射线OM为终边所成的 角,叫做点M的极径, 叫做点M的极角,有序数对 (,)就叫做M的极坐标。
点M:在角终边的反向延长线上,且|OM|=||
5 M(-2, 5)
6
6
O°
x
° O
x•
•M(-2, 5) M (, )
6
小结: 从比较来看, 负极径比正极径多了一个操作,
将射线OP“反向延长”.
2
3•
F
5
6 B•
A•
2
D
•
。 O1
- 人民教育出版社 高中/选修4-4
A( 4,0)
4
B(3, 56)
(1)已知两点P(5、 ),Q(1, ),求线段PQ的长度。
4
4
(2)已知两点P(5、5 ),Q(1, ),求线段PQ的长度。
4
,4
(3)说明满足条件 , 0的点M(,)所组成的图形
3
思考:在本节开头关于修建高速公路的问题中能否
在极坐标系中解题。
人民教育出版社 高中/选修4-4
数学运用
例3. 已知点Q(, ),分别按下列条件求出点P的坐标:
高中数学选修4-4(人教A版)第一讲坐标系1.3知识点总结含同步练习及答案
第一讲 坐标系 三 简单曲线的极坐标方程
一、知识清单
极坐标与极坐标方程
二、知识讲解
1.极坐标与极坐标方程 描述: 极坐标系 在平面上取一个定点O ,由O 点出发的一条射线Ox,一个长度单位及计算角度的正方向(通常取 逆时针方向),合称为一个极坐标系.O 点称为极点,Ox称为极轴.平面任一点M 的位置可以由 线段OM 的长度ρ 和从Ox到OM 的角度θ 来刻画.这两个数组成的有序对(ρ, θ)称为点M 的极坐 标.ρ 称为极径,θ 称为极角. 在极坐标系(ρ, θ)中,一般限定ρ ≥ 0.当ρ = 0时,就与极点重合,此时θ 不确定.给定点的极坐 标(ρ, θ),就唯一地确定了平面上的一个点.但是,平面上的一个点的极坐标并不是唯一的,它有 无穷多种表示形式.事实上,(ρ, θ)和(ρ, θ + 2kπ)代表同一个点,其中k 为整数.可见,平面上的 点与它的极坐标不是一一对应关系.这是极坐标与直角坐标的不同之处,如果限定ρ ≥ 0, 0 ≤ θ ≤ 2π,则除极点外,平面上的点就与它的极坐标系构成一一对应关系. ρ < 0,此时极坐标(ρ, θ)对应的点M 的位置按下面规则确定:点M 在与极轴成θ 角的射线的反向 延长线上,它到极点O 的距离为|ρ|,即规定当ρ < 0时,点M (ρ, θ)就是点M (−ρ, θ + π). 极坐标与直角坐标系的关系 设M 为平面上的一点,它的直角坐标系为(x, y),极坐标为(ρ, θ).则有{ x = ρ cos θ 或
⎧ ρ2 = x 2 + y 2 ⎨ ⎩ tan θ = y (x ≠ 0) ,ρ < 0也成立. x
y = ρ sin θ
曲线的极坐标方程 在给定的平面上极坐标系下,有一个二元方程F (ρ, θ) = 0.如果曲线C 是由极坐标(ρ, θ)满足方程 的所有点组成的,则称此二元方程F (ρ, θ) = 0为曲线C 的极坐标方程. 圆心(a, 0)在极轴上且过极点的圆,其极坐标方程是ρ = 2a cos θ ;圆心在点(a, 圆,其极坐标方程是ρ = 2a sin θ,0 ≤ θ ≤ π.
高中数学选修4-4知识点归纳

高中数学选修4-4知识点归纳高中数学选修4-4主要内容是复数的运算和应用。
复数是实数与虚数的和,形式为a+bi,其中a和b都是实数,i是虚数单位,满足i^2=-1。
1.复数的表示和性质:复数可以用直角坐标系表示,实部和虚部分别对应于横坐标和纵坐标。
复数具有加法、减法、乘法和除法四则运算,遵循实数的运算法则。
复数的共轭复数表示为a-bi,共轭复数具有性质:两个复数的和等于其实部的和加上虚部的和,两个复数的积等于实部的积减去虚部的积。
2.复数的平方根与n次方:对于任意一个复数z=a+bi,令w=x+yi是z的平方根,则w^2=z,即(x+yi)^2=a+bi。
将等式两边展开,得到x^2-y^2+(2xy)i=a+bi。
由此得到实部的方程组x^2-y^2=a和虚部的方程组2xy=b。
解这两个方程组,就可以得到平方根w的实部和虚部。
同样的方法,我们可以计算复数的n次方。
3.复数的模和辐角:复数的模表示复数到原点的距离,记为|z|,计算公式是|z|=√(a^2+b^2)。
复数的辐角表示复数与正实轴之间的夹角,记为θ,计算公式是tanθ=b/a。
复数的辐角一般用弧度表示,可以在求辐角时使用反正切函数。
复数的模和辐角与复数的实部和虚部之间有一定的关系,可以通过公式a=|z|cosθ,b=|z|sinθ进行互相转换。
4.复数的指数形式和三角形式:复数的指数形式表示为z=|z|e^(iθ),其中e是数学常数自然常数,e≈2.71828。
将复数的指数形式进行展开,可以得到z=|z|(cosθ+isinθ)。
这个形式叫做复数的三角形式,其中|z|表示模,θ表示辐角。
三角形式可以用于复数的运算和求解复数方程。
指数形式可以用于复数乘法和除法的运算,有简洁的表达方式。
5.复数的应用:复数广泛应用于科学和工程领域,尤其是在电学和物理学中。
在电学中,复数可以描述交流电的电压和电流,计算复数的平均功率和相位差。
在物理学中,复数可以描述波的传播和干涉现象,求解复杂的波动方程。
高中数学选修4-4-极坐标

极坐标知识集结知识元极坐标知识讲解1.极坐标系【知识点的认识】极坐标系与点的极坐标在平面上取一个定点O,自点O引一条射线Ox,同时确定一个长度单位和计算角度的正方向(通常取逆时针方向为正方向),这样就建立了一个极坐标系.其中,点O称为极点,射线Ox称为极轴.设M是平面上任一点,ρ表示OM的长度,θ表示以射线Ox为始边,射线OM为终边所成的角.那么,有序数对(ρ,θ)称为点M的极坐标.显然,每一个有序实数对(ρ,θ)决定一个点的位置.其中,ρ称为点M 的极径,θ称为点M的极角.由极径的意义可知ρ≥0,当极角θ的取值范围是[0,2π)时,平面上的点(除去极点)就与极坐标(ρ,θ)(ρ≠0)建立一一对应的关系,我们约定,极点的极坐标是极径ρ=0,极角θ可取任意角.2.简单曲线的极坐标方程【知识点的认识】一、曲线的极坐标方程定义:如果曲线C上的点与方程f(ρ,θ)=0有如下关系(1)曲线C上任一点的坐标(所有坐标中至少有一个)符合方程f(ρ,θ)=0;(2)以方程f(ρ,θ)=0的所有解为坐标的点都在曲线C上.则曲线C的方程是f(ρ,θ)=0.二、求曲线的极坐标方程的步骤:与直角坐标系里的情况一样①建系(适当的极坐标系)②设点(设M(ρ,θ)为要求方程的曲线上任意一点)③列等式(构造△,利用三角形边角关系的定理列关于M的等式)④将等式坐标化⑤化简(此方程f(ρ,θ)=0即为曲线的方程)三、圆的极坐标方程(1)圆心在极点,半径为r,ρ=r.(2)中心在C(ρ0,θ0),半径为r.ρ2+ρ02﹣2ρρ0cos(θ﹣θ0)=r2.四、直线的极坐标方程(1)过极点,θ=θ0(ρ∈R)(2)过某个定点垂直于极轴,ρcosθ=a(3)过某个定点平行于极轴,r sinθ=a(4)过某个定点(ρ1,θ1),且与极轴成的角度α,ρsin(α﹣θ)=ρ1sin(α﹣θ1)五、直线的极坐标方程步骤1、据题意画出草图;2、设点M(ρ,θ)是直线上任意一点;3、连接MO;4、根据几何条件建立关于ρ,θ的方程,并化简;5、检验并确认所得的方程即为所求.3.点的极坐标和直角坐标的互化【知识点的认识】坐标之间的互化(1)点的极坐标和直角坐标的互化以直角坐标系的原点O为极点,x轴的正半轴为极轴,且在两种坐标系中取相同的长度单位(如图).平面内任意一点P的直角坐标与极坐标分别为(x,y)和(ρ,θ),则由三角函数的定义可以得到如下两组公式:,.通常情况下,将点的直角坐标化为极坐标时,取ρ≥0,0≤θ<2π.(2)空间点P的直角坐标(x,y,z)与柱坐标(ρ,θ,z)之间的变换公式为:.(3)空间点P的直角坐标(x,y,z)与球坐标(r,φ,θ)之间的变换关系为:.例题精讲极坐标例1.在极坐标系中,已知M(1,),N,则|MN|=()A.B.C.1+D.2例2.在极坐标系中,已知A(3,),B(4,),O为极点,则△AOB的面积为()A.3B.C.D.2例3.已知直线l:(t为参数)与曲线ρ2=的相交弦中点坐标为(1,1),则a等于()A.-B.C.-D.当堂练习单选题练习1.已知曲线C的极坐标方程为:ρ=2cosθ-4sinθ,P为曲线C上的动点,O为极点,则|PO|的最大值为()A.2B.4C.D.2练习2.在极坐标中,O为极点,曲线C:ρ=2cosθ上两点A、B对应的极角分别为,则△AOB 的面积为()A.B.C.D.练习3.已知直线l过点P(-2,0),且倾斜角为150°,以直角坐标系的原点为极点,x轴的正半轴为极轴建立极坐标系,曲线C的极坐标方程为ρ2-2ρcosθ=15.若直线l交曲线C于A,B两点,则|PA|∙|PB|的值为()A.5B.7C.15D.20练习4.在平面直角坐标系中,记曲线C为点P(2cosθ-1,2sinθ+1)的轨迹,直线x-ty+2=0与曲线C 交于A,B两点,则|AB|的最小值为()A.2B.C.D.4练习5.在极坐标系中,直线ρcosθ=2与圆ρ=4cosθ交于A,B两点,则|AB|=()A.4B.C.2D.练习6.在同一平面直角坐标系中,将直线x-2y=2按φ:变换后得到的直线l,若以坐标原点为极点,以x轴的正半轴为极轴建立极坐标系,则直线l的极坐标方程为()A.4ρcosθ-ρsinθ=4B.ρcosθ-16ρsinθ=4C.ρcosθ-4ρsinθ=4D.ρcosθ-8ρsinθ=4填空题练习1.在极坐标系中,圆ρ=1上的点到直线的距离的最大值是___.练习2.在极坐标系中,点(2,)到直线ρsinθ-ρcosθ-6=0的距离为___.练习3.在极坐标系下,已知圆,则圆O的直角坐标方程是_________________练习4.在极坐标系中,若点A(3,),B(3,),则△AOB的面积为___解答题练习1.'在平面直角坐标系xOy中,以原点为极点,x轴为极轴建立极坐标系,曲线C的方程是,直线l的参数方程为(t为参数,0≤α<π),设P (1,2),直线l与曲线C交于A,B两点.(1)当α=0时,求|AB|的长度;(2)求|PA|2+|PB|2的取值范围.'练习2.'在直角坐标xOy中,直线l的参数方程为{(t为参数)在以O为极点.x轴正半轴为极轴的极坐标系中.曲线C的极坐标方程为ρ=4sinθ-2cosθ.(I)求直线l的普通方程与曲线C的直角坐标方程:(Ⅱ)若直线l与y轴的交点为P,直线l与曲线C的交点为A,B,求|PA||PB|的值.'。
高中数学选修4知识点总结(全)
高中数学选修4知识点总结(全)
一、函数的圆心极坐标方程:
1 、双曲线的圆心极坐标方程:
x=acoshu;
y=bsinhu;
其中,a为椭圆的焦距,b为另一维的焦距,u为S的极角;
圆心极坐标系是一种以圆心和极角为坐标的极坐标系统,它是一就用以表示空间各点位置的最主要的坐标系统。
所谓的极坐标系(Polar Coordinate System),指的是以固定的极轴为坐标轴,空间各点的位置由极轴上的极角和到极轴的距离来确定。
由于圆心极坐标以圆心作为极轴,所以,圆心极坐标系又称为圆极坐标系。
圆心极坐标系能够完美地描述双曲线和椭圆,将原来由圆点拟合所得到的复杂函数简单化为一个关于极角u的函数。
圆心极坐标系不仅仅可以描述双曲线和椭圆,它还可以描述球面的极坐标,和其他的几何体的极坐标,这使得它特别的有用。
1、圆的极坐标方程:
r = a
其中,a为曲线的半径;
四、三次曲线:
三次曲线指的是由三个参数确定唯一曲线形状的曲线,即存在常数a,b,c,使曲线y=ax^3+bx^2+cx满足给定函数的条件,这类曲线一般可以在直角坐标系中用抛物线画出。
一般的,三次曲线有神符式的表达形式:
y = ax^3+bx^2+cx+d
其中d为常数。
此外,三次曲线在圆心极坐标系中也有表示方法:
r =a +bsinu +csin^2u
其中a、b、c为常数,u为极角。
六、椭圆圆心极坐标表示:。
高中数学选修1-1、1-2、4-1、4-4知识点归纳
射影定理:直角三角形斜边上的高是两直角边在斜边上射影的比例中项; 两直角边分别是它们在斜边上射影与斜边的比例中项。
圆周角定理:圆上一条弧所对的圆周角等于它所对的圆周角的一半。 圆心角定理:圆心角的度数等于它所对弧的度数。
选修 1- 1、 1-2 数学知识点
第一部分 简单逻辑用语
1. 原命题:“若 p ,则 q ”;逆命题: “若 q ,则 p ”; 否命题:“若 p ,则 q ”;逆否命题: “若 q ,则 p ”
2. 四种命题的真假性之间的关系: ( 1)两个命题互为逆否命题,它们有相同的真假性; ( 2)两个命题为互逆命题或互否命题,它们的真假性没有关系.
3. 若 p 若p
q ,则 p 是 q 的充分条件, q 是 p 的必要条件. q ,则 p 是 q 的充要条件(充分必要条件) .
集合间的包含关系:若 A B ,则 A 是 B 的充分条件或 B 是 A 的必要条件;
若 A=B,则 A 是 B 的充要条件;
4. ⑴全称量词——“所有的” 、“任意一个”等,用“
3. 极坐标与直角坐标的互化:
2 x2 y2 , x y sin , tan
cos , y (x 0) x
3.圆 ( x a) 2 ( y b)2 r 2的参数方程可表示为
x a rcos , ( 为参数 ) .
y b rsin .
2
2
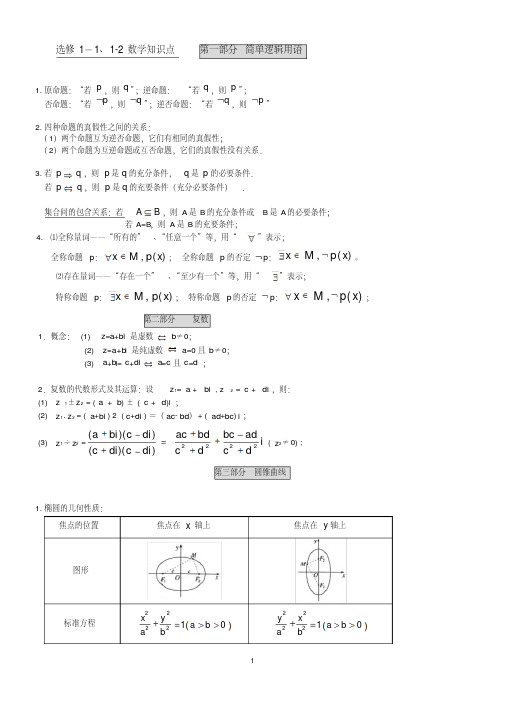
椭圆 x a2
y b2
1 (a b
0) 的参数方程可表示为
x acos , ( 为参数 ) .
nx n
(完整版)高中数学选修4—4(坐标系与参数方程)知识点总结
坐标系与参数方程 知识点1.平面直角坐标系中的坐标伸缩变换设点P(x,y)是平面直角坐标系中的任意一点,在变换(0):(0)x xy yλλϕμμ'=>⎧⎨'=>⎩g g 的作用下,点P(x,y)对应到点(,)P x y ''',称ϕ为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.2.极坐标系的概念 (1)极坐标系如图所示,在平面内取一个定点O ,叫做极点,自极点O 引一条射线Ox ,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系.(2)极坐标设M 是平面内一点,极点O 与点M 的距离|OM|叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的角xOM ∠叫做点M 的极角,记为θ.有序数对(,)ρθ叫做点M 的极坐标,记作(,)M ρθ.一般地,不作特殊说明时,我们认为0,ρ≥θ可取任意实数. 特别地,当点M 在极点时,它的极坐标为(0, θ)(θ∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示.如果规定0,02ρθπ>≤<,那么除极点外,平面内的点可用唯一的极坐标(,)ρθ表示;同时,极坐标(,)ρθ表示的点也是唯一确定的.3.极坐标和直角坐标的互化(1)互化背景:把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示:(2)互化公式:设M 是坐标平面内任意一点,它的直角坐标是(,)x y ,极坐标是(,)ρθ(0ρ≥),于是极坐标与直角坐标的互化公式如表:点M直角坐标(,)x y极坐标(,)ρθ互化公式cos sin x y ρθρθ=⎧⎨=⎩222tan (0)x y yx xρθ=+=≠ 在一般情况下,由tan θ确定角时,可根据点M 所在的象限最小正角. 4.常见曲线的极坐标方程曲线 图形 极坐标方程圆心在极点,半径为r 的圆(02)r ρθπ=≤<圆心为(,0)r ,半径为r 的圆2cos ()22r ππρθθ=-≤<圆心为(,)2r π,半径为r 的圆2sin (0)r ρθθπ≤<过极点,倾斜角为α的直线(1)()()R R θαρθπαρ=∈=+∈或 (2)(0)(0)θαρθπαρ=≥=+≥和过点(,0)a ,与极轴垂直的直线cos ()22a ππρθθ=-<<过点(,)2a π,与极轴平行的直线sin (0)a ρθθπ=<<注:由于平面上点的极坐标的表示形式不唯一,即(,),(,2),(,),(,),ρθρπθρπθρπθ+-+--+都表示同一点的坐标,这与点的直角坐标的唯一性明显不同.所以对于曲线上的点的极坐标的多种表示形式,只要求至少有一个能满足极坐标方程即可.例如对于极坐标方程,ρθ=点(,)44M ππ可以表示为5(,2)(,2),444444ππππππππ+-或或(-)等多种形式,其中,只有(,)44ππ的极坐标满足方程ρθ=.二、参数方程 1.参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标,x y 都是某个变数t 的函数()()x f t y g t =⎧⎨=⎩①,并且对于t 的每一个允许值,由方程组①所确定的点(,)M x y 都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数,x y 的变数t 叫做参变数,简称参数,相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.2.参数方程和普通方程的互化(1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地可以通过消去参数而从参数方程得到普通方程.(2)如果知道变数,x y 中的一个与参数t 的关系,例如()x f t =,把它代入普通方程,求出另一个变数与参数的关系()y g t =,那么()()x f t y g t =⎧⎨=⎩就是曲线的参数方程,在参数方程与普通方程的互化中,必须使,x y 的取值范围保持一致.注:普通方程化为参数方程,参数方程的形式不一定唯一。
高中数学选修4-4-参数方程

参数方程知识集结知识元参数方程知识讲解1.参数方程的概念【知识点的认识】参数方程的定义在平面直角坐标系中,如果曲线上任意一点的坐标(x,y)都是某个变数t的函数,即,并且对于t的每一个允许值,由该方程组所确定的点M(x,y)都在这条曲线上,那么此方程组就叫做这条曲线的参数方程,联系变数x,y的变数t叫做参变数,简称参数.对于参数方程而言,直接给出点的坐标间关系的方程F(x,y)=0叫做普通方程.2.参数方程化成普通方程【知识点的认识】参数方程和普通方程的互化由参数方程化为普通方程:消去参数,消参数的方法有代入法、加减(或乘除)消元法、三角代换法等.如果知道变数x,y中的一个与参数t的关系,例如x=f(t),把它代入普通方程,求出另一个变数与参数的关系y=g(t),那么就是曲线的参数方程,在参数方程与普通方程的互化中,必须使x,y的取值范围保持一致.3.直线的参数方程【知识点的认识】直线、圆锥曲线的普通方程和参数方程轨迹普通方程参数方程直线y﹣y0=tan α(x﹣x0)(t为参数)圆(x﹣a)2+(y﹣b)2=r2(θ为参数)椭圆(θ为参数)+=1(a>b>0)双曲线(θ为参数)﹣=1抛物线y2=2px(p>0)(t为参数)【解题思路点拨】1.选取参数时的一般原则是:(1)x,y与参数的关系较明显,并列出关系式;(2)当参数取一值时,可唯一的确定x,y的值;(3)在研究与时间有关的运动物体时,常选时间作为参数;在研究旋转物体时,常选用旋转角作为参数;此外,也常用线段的长度、倾斜角、斜率、截距等作为参数.2.求曲线的参数方程常常分成以下几步:(1)建立直角坐标系,在曲线上设任意一点P(x,y);(2)选择适当的参数;(3)找出x,y与参数的关系,列出解析式;(4)证明(常常省略).3.根据直线的参数方程标准式中t的几何意义,有如下常用结论:(1)若M1,M2为l上任意两点,M1,M2对应t的值分别为t1,t2,则|M1M2|=|t1﹣t2|;(2)若M0为线段M1M2的中点,则有t1+t2=0;(3)若线段M1M2的中点为M,则M=t M=.一般地,若点P分线段M1M2所成的比为λ,则t P=.4.直线的参数方程的一般式(t为参数),是过点M0(x0,y0),斜率为的直线的参数方程.当且仅当a2+b2=1且b≥0时,才是标准方程,t才具有标准方程中的几何意义.将非标准方程化为标准方程是(t′∈R),式中“±”号,当a,b同号时取正;当a,b异号时取负.5.参数方程与普通方程互化时,要注意:(1)不是所有的参数方程都能化为普通方程;(2)在化参数方程为普通方程时变量的范围不能扩大或缩小;(3)把普通方程化为参数方程时,由于参数选择的不同而不同,参数的选择是由具体的问题来决定的.6.在已知圆、椭圆、双曲线和抛物线上取一点可考虑用其参数方程设定点的坐标,将问题转化为三角函数问题求解.7.在直线与圆和圆锥位置关系问题中,涉及距离问题探求可考虑应用直线参数方程中参数的几何意义求解.8.在求某些动点的轨迹方程时,直接寻找x,y的关系困难,甚至找不出时,可以通过引入参数,建立动点的参数方程后求解.4.圆的参数方程【知识点的认识】直线、圆锥曲线的普通方程和参数方程轨迹普通方程参数方程直线y﹣y0=tan α(x﹣x0)(t为参数)圆(x﹣a)2+(y﹣b)2=r2(θ为参数)椭圆(θ为参数)+=1(a>b>0)双曲线(θ为参数)﹣=1抛物线y2=2px(p>0)(t为参数)【解题思路点拨】1.选取参数时的一般原则是:(1)x,y与参数的关系较明显,并列出关系式;(2)当参数取一值时,可唯一的确定x,y的值;(3)在研究与时间有关的运动物体时,常选时间作为参数;在研究旋转物体时,常选用旋转角作为参数;此外,也常用线段的长度、倾斜角、斜率、截距等作为参数.2.求曲线的参数方程常常分成以下几步:(1)建立直角坐标系,在曲线上设任意一点P(x,y);(2)选择适当的参数;(3)找出x,y与参数的关系,列出解析式;(4)证明(常常省略).3.根据直线的参数方程标准式中t的几何意义,有如下常用结论:(1)若M1,M2为l上任意两点,M1,M2对应t的值分别为t1,t2,则|M1M2|=|t1﹣t2|;(2)若M0为线段M1M2的中点,则有t1+t2=0;(3)若线段M1M2的中点为M,则M0M=t M=.一般地,若点P分线段M1M2所成的比为λ,则t P=.4.直线的参数方程的一般式(t为参数),是过点M0(x0,y0),斜率为的直线的参数方程.当且仅当a2+b2=1且b≥0时,才是标准方程,t才具有标准方程中的几何意义.将非标准方程化为标准方程是(t′∈R),式中“±”号,当a,b同号时取正;当a,b异号时取负.5.参数方程与普通方程互化时,要注意:(1)不是所有的参数方程都能化为普通方程;(2)在化参数方程为普通方程时变量的范围不能扩大或缩小;(3)把普通方程化为参数方程时,由于参数选择的不同而不同,参数的选择是由具体的问题来决定的.6.在已知圆、椭圆、双曲线和抛物线上取一点可考虑用其参数方程设定点的坐标,将问题转化为三角函数问题求解.7.在直线与圆和圆锥位置关系问题中,涉及距离问题探求可考虑应用直线参数方程中参数的几何意义求解.8.在求某些动点的轨迹方程时,直接寻找x,y的关系困难,甚至找不出时,可以通过引入参数,建立动点的参数方程后求解.例题精讲参数方程例1.直线l的参数方程为(t为参数).圆C的参数方程为(θ为参数),则直线l被圆C截得的弦长为___.例2.已知圆C的参数方程为(θ为参数),以原点为极点,x轴的正半轴为极轴建立极坐标系,直线l的极坐标方程为ρsinθ+ρcosθ=1,则直线l截圆C所得的弦长是___.例3.在平面直角坐标系中,以原点为极点,x轴正半轴为极轴建立极坐标系,已知抛物线C的极坐标方程为ρcos2θ=4sinθ(ρ≥0),直线l的参数方程为(t为参数),设直线l与抛物线C的两交点为A、B,点F为抛物线C的焦点,则|AF|+|BF|=___.当堂练习填空题练习1.在平面直角坐标系xOy中,直线l的参数方程为(t为参数).圆C的参数方程是=(θ为参数),直线l与圆C交于两个不同的点A、B,当点P在圆C上运动时,△PAB面积的最大值为___练习2.参数方程(θ∈R)所表示的曲线与x轴的交点坐标是_______练习3.设直线的参数方程为(t为参数),点P在直线上,且与点M0(-4,0)的距离为2,若该直线的参数方程改写成(t为参数),则在这个方程中P点对应的t值为____.练习4.设a∈R,直线ax-y+2=0和圆(θ为参数)相切,则a的值为___。
(完整版)高中数学选修4-4知识点总结
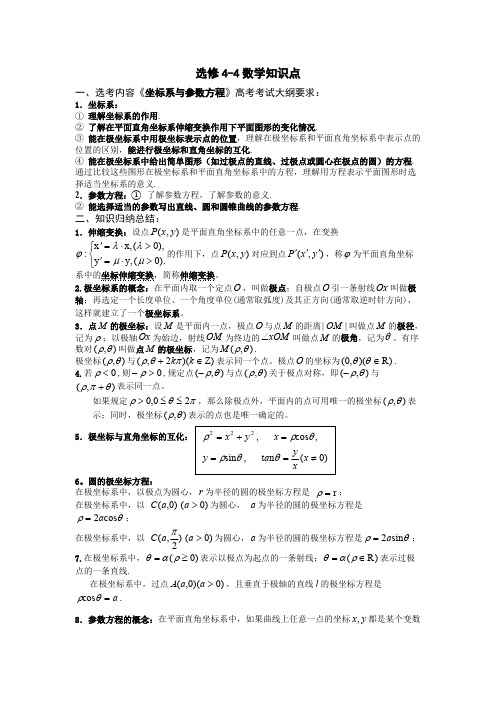
选修4-4数学知识点一、选考内容《坐标系与参数方程》高考考试大纲要求:1.坐标系: ① 理解坐标系的作用. ② 了解在平面直角坐标系伸缩变换作用下平面图形的变化情况.③ 能在极坐标系中用极坐标表示点的位置,理解在极坐标系和平面直角坐标系中表示点的位置的区别,能进行极坐标和直角坐标的互化.④ 能在极坐标系中给出简单图形(如过极点的直线、过极点或圆心在极点的圆)的方程.通过比较这些图形在极坐标系和平面直角坐标系中的方程,理解用方程表示平面图形时选择适当坐标系的意义.2.参数方程:① 了解参数方程,了解参数的意义.② 能选择适当的参数写出直线、圆和圆锥曲线的参数方程.二、知识归纳总结:1.伸缩变换:设点是平面直角坐标系中的任意一点,在变换),(y x P 的作用下,点对应到点,称为平面直角坐标⎩⎨⎧>⋅='>⋅=').0(,y y 0),(x,x :μμλλϕ),(y x P ),(y x P '''ϕ系中的坐标伸缩变换,简称伸缩变换。
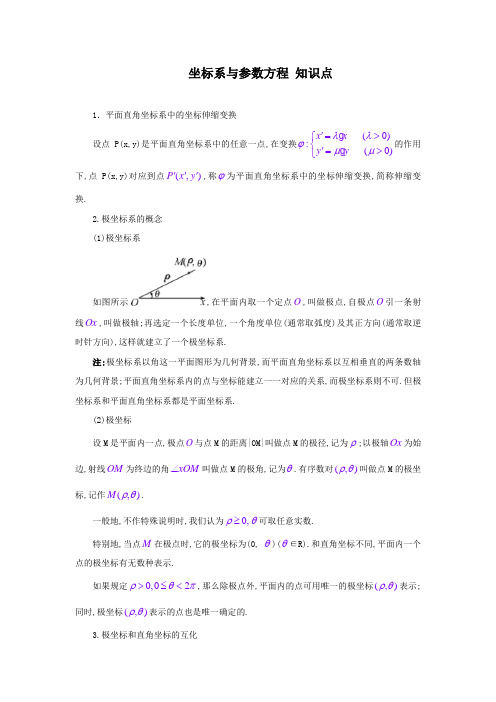
2.极坐标系的概念:在平面内取一个定点,叫做极点;自极点引一条射线叫做极O O Ox 轴;再选定一个长度单位、一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系。
3.点的极坐标:设是平面内一点,极点与点的距离叫做点的极径,M M O M ||OM M 记为;以极轴为始边,射线为终边的叫做点的极角,记为。
有序ρOx OM xOM ∠M θ数对叫做点的极坐标,记为.),(θρM ),(θρM 极坐标与表示同一个点。
极点的坐标为.),(θρ)Z )(2,(∈+k k πθρO )R )(,0(∈θθ4.若,则,规定点与点关于极点对称,即与0<ρ0>-ρ),(θρ-),(θρ),(θρ-表示同一点。
),(θπρ+如果规定,那么除极点外,平面内的点可用唯一的极坐标表πθρ20,0≤≤>),(θρ示;同时,极坐标表示的点也是唯一确定的。
高中数学选修4-4知识点清单教学提纲
高中数学选修44坐标系与参数方程知识点总结第一讲一平面直角坐标系1.平面直角坐标系(1)数轴:规定了原点,正方向和单位长度的直线叫数轴.数轴上的点与实数之间可以建立一一对应关系.(2)平面直角坐标系:①定义:在同一个平面上互相垂直且有公共原点的两条数轴构成平面直角坐标系,简称为直角坐标系;②数轴的正方向:两条数轴分别置于水平位置与竖直位置,取向右与向上的方向分别为两条数轴的正方向;③坐标轴水平的数轴叫做x轴或横坐标轴,竖直的数轴叫做y轴或纵坐标轴,x轴或y 轴统称为坐标轴;④坐标原点:它们的公共原点称为直角坐标系的原点;⑤对应关系:平面直角坐标系上的点与有序实数对(x,y)之间可以建立一一对应关系.(3)距离公式与中点坐标公式:设平面直角坐标系中,点P1(x1,y1),P2(x2,y2),线段P1P2的中点为P2.设点P(x,y)是平面直角坐标系中的任意一点,在变换φ点P(x,y)对应到点P′(x′,y′),称φ为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.二极坐标系(1)定义:在平面内取一个定点O,叫做极点;自极点O引一条射线Ox叫做极轴;再选定一个长度单位、一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系.(2)极坐标系的四个要素:①极点;②极轴;③长度单位;④角度单位及它的方向.(3)图示2.极坐标(1)极坐标的定义:设M是平面内一点,极点O与点M的距离|OM|叫做点M的极径,记为ρ;以极轴Ox为始边,射线OM为终边的角xOM叫做点M的极角,记为θ.有序数对(ρ,θ)叫做点M的极坐标,记作M(ρ,θ).(2)极坐标系中的点与它的极坐标的对应关系:在极坐标系中,极点O的极坐标是(0,θ),(θ∈R),若点M的极坐标是M(ρ,θ),则点M的极坐标也可写成M(ρ,θ+2kπ),(k∈Z).若规定ρ>0,0≤θ<2π,则除极点外极坐标系内的点与有序数对(ρ,θ)之间才是一一对应关系.3.极坐标与直角坐标的互化公式如图所示,把直角坐标系的原点作为极点,x轴的正半轴作为极轴,且长度单位相同,设任意一点M的直角坐标与极坐标分别为(x,y),(ρ,θ).(1)极坐标化直角坐标=ρcosθ,=ρsinθW.(2)直角坐标化极坐标2=x2+y2,θ=yx(x≠0).三简单曲线的极坐标方程1.曲线的极坐标方程一般地,在极坐标系中,如果平面曲线C上任意一点的极坐标中至少有一个满足方程f(ρ,θ)=0,并且坐标适合方程f(ρ,θ)=0的点都在曲线C上,那么方程f(ρ,θ)=0叫做曲线C的极坐标方程.2.圆的极坐标方程(1)特殊情形如下表:圆心位置极坐标方程图形圆心在极点(0,0)ρ=r (0≤θ<2π)圆心在点(r ,0)ρ=2r cos_θ(-π2≤θ<π2)圆心在点(r ,π2)ρ=2r sin_θ(0≤θ<π)圆心在点(r ,π)ρ=-2r cos_θ(π2≤θ<3π2)圆心在点(r ,3π2)ρ=-2r sin_θ(-π<θ≤0)(2)一般情形:设圆心C (ρ0,θ0),半径为r ,M (ρ,θ)为圆上任意一点,则|CM |=r ,∠COM =|θ-θ0|,根据余弦定理可得圆C 的极坐标方程为ρ2-2ρ0ρcos(θ-θ0)+ρ20-r 2=0即)cos(2002022θθρρρρ--+=r 3.直线的极坐标方程00△OPM 中利用正弦定理可得直线l 的极坐标方程为ρsin(α-θ)=ρ0sin(α-θ0).四柱坐标系与球坐标系简介(了解)1.柱坐标系(1)定义:一般地,如图建立空间直角坐标系Oxyz .设P 是空间任意一点,它在Oxy 平面上的射影为Q ,用(ρ,θ)(ρ≥0,0≤θ<2π)表示点Q 在平面Oxy 上的极坐标,这时点P 的位置可用有序数组(ρ,θ,z )(z ∈R )表示.这样,我们建立了空间的点与有序数组(ρ,θ,z )之间的一种对应关系.把建立上述对应关系的坐标系叫做柱坐标系,有序数组(ρ,θ,z )叫做点P 的柱坐标,记作P (ρ,θ,z ),其中ρ≥0,0≤θ<2π,z ∈R .(2)空间点P 的直角坐标(x ,y ,z )与柱坐标(ρ,θ,z )x =ρcos θy =ρsin θz =z2.球坐标系(1)定义:一般地,如图建立空间直角坐标系Oxyz .设P 是空间任意一点,连接OP ,记|OP |=r ,OP 与Oz 轴正向所夹的角为φ,设P 在Oxy 平面上的射影为Q ,Ox 轴按逆时针方向旋转到OQ 时所转过的最小正角为θ,这样点P 的位置就可以用有序数组(r ,φ,θ)表示,这样,空间的点与有序数组(r ,φ,θ)之间建立了一种对应关系.把建立上述对应关系的坐标系叫做球坐标系(或空间极坐标系),有序数组(r ,φ,θ),叫做点P 的球坐标,记作P (r ,φ,θ),其中r ≥0,0≤φ≤π,0≤θ<2π.(2)空间点P 的直角坐标(x ,y ,z )与球坐标(r ,φ,θ)之间x =r sin φcos θy =r sin φsin θz =r cos φ.第二讲:一曲线的参数方程1.参数方程的概念1.参数方程的概念(1)定义:一般地,在平面直角坐标系中,如果曲线上任意一点的坐标x ,y 都是某个变数t 的函数:=f (t )=g (t )①,并且对于t 的每一个允许值,由方程组①所确定的点M (x ,y )都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数x ,y 的变数t 叫做参变数,简称参数.相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.(2)参数的意义:参数是联系变数x ,y 的桥梁,可以是有物理意义或几何意义的变数,也可以是没有明显实际意义的变数.2.参数方程与普通方程的区别与联系(1)区别:普通方程F (x ,y )=0,直接给出了曲线上点的坐标x ,y 之间的关系,它含有x ,y =f (t )=g (t )(t 为参数)间接给出了曲线上点的坐标x ,y 之间的关系,它含有三个变量t ,x ,y ,其中x 和y 都是参数t 的函数.(2)联系:普通方程中自变量有一个,而且给定其中任意一个变量的值,可以确定另一个变量的值;参数方程中自变量也只有一个,而且给定参数t 的一个值,就可以求出唯一对应的x ,y 的值.这两种方程之间可以进行互化,通过消去参数可以把参数方程化为普通方程,而通过引入参数,也可把普通方程化为参数方程.2.圆的参数方程1.圆心在坐标原点,半径为r 的圆的参数方程如图圆O 与x 轴正半轴交点M 0(r ,0).(1)设M (x ,y )为圆O 上任一点,以OM 为终边的角设为θ,则以θ为参数的圆O 的参数其中参数θ的几何意义是OM 0绕O 点逆时针旋转到OM 的位置时转过的角度.(2)设动点M 在圆上从M 0点开始逆时针旋转作匀速圆周运动,角速度为ω,则OM 0经过时间t 转过的角θ=ωt ,则以t 为参数的圆O 其中参数t 的物理意义是质点做匀速圆周运动的时间.2.圆心为C (a ,b ),半径为r 的圆的参数方程圆心为(a ,b ),半径为r 的圆的参数方程可以看成将圆心在原点,半径为r 的圆通过坐3.参数方程和普通方程的互化曲线的参数方程和普通方程的互化(1)曲线的参数方程和普通方程是在同一平面直角坐标系中表示曲线的方程的两种不同形式,两种方程是等价的可以互相转化.(2)将曲线的参数方程化为普通方程,有利于识别曲线的类型.参数方程通过消去参数就可得到普通方程.(3)普通方程化参数方程,首先确定变数x ,y 中的一个与参数t 的关系,例如x =f (t ),其次将x =f (t )代入普通方程解出y =g (t )(4)在参数方程与普通方程的互化中,必须使x ,y 的取值范围保持一致.二圆锥曲线的参数方程1.椭圆的参数方程椭圆的参数方程(1)中心在原点,焦点在x 轴上的椭圆x 2a 2+y 2b 2=1(a >b >0)φ是参数),规定参数φ的取值范围是[0,2π).(2)中心在原点,焦点在y 轴上的椭圆y 2a 2+x 2b 2=1(a >b >0)φ是参数),规定参数φ的取值范围是[0,2π).(3)中心在(h ,k )的椭圆普通方程为(x -h )2a 2+(y -k )2b 2=1,则其参数方程为φ是参数).2.双曲线的参数方程和抛物线的参数方程1.双曲线的参数方程(1)中心在原点,焦点在x 轴上的双曲线x 2a 2-y 2b 2=1规定参数φ的取值范围为φ∈[0,2π)且φ≠π2,φ≠3π2.(2)中心在原点,焦点在y 轴上的双曲线y 2a 2-x 2b 2=12.抛物线的参数方程(1)抛物线y 2=2px (2)参数t 的几何意义是抛物线上除顶点外的任意一点与原点连线的斜率的倒数.三直线的参数方程1.直线的参数方程经过点M 0(x 0,y 0),倾斜角为α的直线l t 为参数).2.直线的参数方程中参数t 的几何意义(1)参数t 的绝对值表示参数t 所对应的点M 到定点M 0的距离.(2)当M 0M →与e (直线的单位方向向量)同向时,t 取正数.当M 0M →与e 反向时,t 取负数,当M 与M 0重合时,t =0.3.直线参数方程的其他形式对于同一条直线的普通方程,选取的参数不同,会得到不同的参数方程.我们把过点M 0(x 0,y 0),倾斜角为α的直线,选取参数t =M 0M =x 0+t cos α=y 0+t sin α(t 为参数)称为直线参数方程的标准形式,此时的参数t 有明确的几何意义.一般地,过点M 0(x 0,y 0),斜率k =ba (a ,b 为常数)=x 0+at =y 0+bt(t 为参数),称为直线参数方程的一般形式,此时的参数t 不具有标准式中参数的几何意义.四渐开线与摆线(了解)1.渐开线的概念及参数方程(1)渐开线的产生过程及定义把一条没有弹性的细绳绕在一个圆盘上,在绳的外端系上一支铅笔,将绳子拉紧,保持绳子与圆相切,逐渐展开,铅笔画出的曲线叫做圆的渐开线,相应的定圆叫做渐开线的基圆.(2)圆的渐开线的参数方程以基圆圆心O 为原点,直线OA 为x 轴,建立如图所示的平面直角坐标系.设基圆的半径为r ,绳子外端M 的坐标为(x ,y )φ是参数).这就是圆的渐开线的参数方程.2.摆线的概念及参数方程(1)摆线的产生过程及定义平面内,一个动圆沿着一条定直线无滑动地滚动时圆周上一个固定点所经过的轨迹,叫做平摆线,简称摆线,又叫旋轮线.(2)半径为r的圆所产生摆线的参数方程为φ是参数).。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数学选修 4-4 坐标系与参数方程知识点总结第一讲一平面直角坐标系1.平面直角坐标系(1)数轴:规定了原点,正方向和单位长度的直线叫数轴.数轴上的点与实数之间可以建立一一对应关系.(2)平面直角坐标系:①定义:在同一个平面上互相垂直且有公共原点的两条数轴构成平面直角坐标系,简称为直角坐标系;②数轴的正方向:两条数轴分别置于水平位置与竖直位置,取向右与向上的方向分别为两条数轴的正方向;③坐标轴水平的数轴叫做x 轴或横坐标轴,竖直的数轴叫做y 轴或纵坐标轴,x 轴或 y 轴统称为坐标轴;④坐标原点:它们的公共原点称为直角坐标系的原点;⑤对应关系:平面直角坐标系上的点与有序实数对(x, y)之间可以建立一一对应关系.(3)距离公式与中点坐标公式:设平面直角坐标系中,点 P1(x1, y1), P2(x2, y2),线段 P1P2的中点为 P,填表:两点间的距离公式中点 P 的坐标公式x1+ x2x=2|P1P2|=(x1-x2)2+(y1-y2)2y1+ y2y=22.平面直角坐标系中的伸缩变换x′=λx(λ>0)设点 P(x, y)是平面直角坐标系中的任意一点,在变换φ:的作用下,y′=μy(μ>0)点 P(x,y)对应到点P′(x,y′),称φ为平面直角坐标系中的坐标伸缩变换,简称伸缩变换.二极坐标系(1)定义:在平面内取一个定点 O,叫做极点;自极点 O 引一条射线 Ox 叫做极轴;再选定一个长度单位、一个角度单位( 通常取弧度)及其正方向(通常取逆时针方向) ,这样就建立了一个极坐标系.(2)极坐标系的四个要素:①极点;②极轴;③长度单位;④角度单位及它的方向.(3)图示2.极坐标(1)极坐标的定义:设M 是平面内一点,极点O 与点 M 的距离 |OM |叫做点 M 的极径,记为ρ;以极轴 Ox 为始边,射线 OM 为终边的角 xOM 叫做点 M 的极角,记为θ.有序数对 ( ρ,θ) 叫做点 M 的极坐标,记作 M(ρ,θ ).(2)极坐标系中的点与它的极坐标的对应关系:在极坐标系中,极点O 的极坐标是 (0,θ) ,(θ∈R ),若点 M 的极坐标是M(ρ,θ ),则点 M 的极坐标也可写成M(ρ,θ+ 2kπ ),(k∈Z ).(ρ,θ )之间才是一一若规定ρ>0, 0≤ θ<2π,则除极点外极坐标系内的点与有序数对对应关系.3.极坐标与直角坐标的互化公式如图所示,把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,且长度单位相同,设任意一点M 的直角坐标与极坐标分别为(x, y), (ρ,θ ).(1)极坐标化直角坐标x=ρcos θ,y=ρsin θW .(2)直角坐标化极坐标ρ2= x2+ y2,ytan θ=x( x≠0) .三简单曲线的极坐标方程1.曲线的极坐标方程一般地,在极坐标系中,如果平面曲线 C 上任意一点的极坐标中至少有一个满足方程f(ρ,θ )= 0,并且坐标适合方程f(ρ,θ )= 0的点都在曲线 C 上,那么方程f(ρ,θ)=0 叫做曲线 C 的极坐标方程.2.圆的极坐标方程(1)特殊情形如下表:圆心位置极坐标方程图形ρ= r圆心在极点 (0, 0)(0≤ θ<2π )ρ= 2r cos_θ圆心在点 (r ,0)π π(- 2 ≤ θ<2 )πρ= 2rsin_θ 圆心在点 (r , 2 )(0≤ θ<π )ρ=- 2r cos_θ圆心在点 (r ,π )π ≤ θ <3π( 22)圆心在点 (r ,3πρ=- 2r sin_θ(- π <θ ≤0)2)(2) 一般情形:设圆心 C(ρ0,θ 0),半径为 r , M(ρ, θ )为圆上任意一点,则 |CM |= r ,∠COM = |θ- θ 2- 2ρ 2-r 2=0 |,根据余弦定理可得圆C 的极坐标方程为 ρ)+ ρ即r 222 2 0 cos(0 )3. 直线的极坐标方程 (1)特殊情形如下表:直线位置极坐标方程图形过极点,倾斜角为(1) θ= α(ρ∈ R ) 或 θ= α+ π(ρ∈ R )α(2) θ= α(ρ≥ 0) 和 θ= π +α(ρ≥ 0)ρcos_θ = a过点 (a , 0),且与极轴垂直π π- 2 <θ < 2过点 a ,π,且与极轴ρsin_θ = a2(0< θ<π )平行过点 (a , 0)倾斜角为 αρsin(α- θ)= asin α(0<θ<π)(2)一般情形,设直线 l 过点 P(ρ0, θ 0),倾斜角为 α, M(ρ, θ)为直线 l 上的动点,则在△ OPM 中利用正弦定理可得直线 l 的极坐标方程为 ρsin(α- θ)= ρsin(α- θ).四柱坐标系与球坐标系简介(了解)1.柱坐标系(1)定义:一般地,如图建立空间直角坐标系 Oxyz.设 P 是空间任意一点,它在 Oxy 平面上的射影为 Q,用 (ρ,θ )(ρ≥ 0, 0≤ θ<2π )表示点 Q 在平面 Oxy 上的极坐标,这时点 P的位置可用有序数组(ρ,θ, z) (z∈R )表示.这样,我们建立了空间的点与有序数组z)之间的一种对应关系.把建立上述对应关系的坐标系叫做柱坐标系,有序数组叫做点 P 的柱坐标,记作P(ρ,θ, z),其中ρ ≥ 0, 0≤ θ <2π, z∈R.(ρ,θ,(ρ,θ, z)(2)空间点P 的直角坐标(x, y, z)与柱坐标(ρ,θ, z)之间的变换公式为x=ρcosy=ρsinθθ .z= z2.球坐标系(1)定义:一般地,如图建立空间直角坐标系Oxyz.设 P 是空间任意一点,连接OP,记|OP |= r ,OP 与 Oz 轴正向所夹的角为φ,设P在Oxy平面上的射影为Q,Ox 轴按逆时针方向旋转到 OQ 时所转过的最小正角为θ,这样点P的位置就可以用有序数组(r,φ ,θ )表示,这样,空间的点与有序数组(r ,φ,θ )之间建立了一种对应关系.把建立上述对应关系的坐标系叫做球坐标系(或空间极坐标系) ,有序数组 (r,φ,θ ),叫做点P 的球坐标,记作P(r ,φ ,θ ),其中 r≥ 0, 0≤ φ ≤ π,0≤ θ <2π .x= r sinφcosθ(2)空间点P 的直角坐标(x,y,z) 与球坐标(r,φ ,θ)之间的变换公式为y= r sinφ sinθ .z=r cosφ第二讲:一曲线的参数方程1.参数方程的概念1.参数方程的概念(1)定义:一般地,在平面直角坐标系中,如果曲线上任意一点的坐标x, y 都是某个变x= f( t)①,并且对于t 的每一个允许值,由方程组①所确定的点M(x,y)数 t 的函数:y= g(t)都在这条曲线上,那么方程①就叫做这条曲线的参数方程,联系变数x, y 的变数 t 叫做参变数,简称参数.相对于参数方程而言,直接给出点的坐标间关系的方程叫做普通方程.(2)参数的意义:参数是联系变数x, y 的桥梁,可以是有物理意义或几何意义的变数,也可以是没有明显实际意义的变数.2.参数方程与普通方程的区别与联系(1)区别:普通方程F(x, y)= 0,直接给出了曲线上点的坐标x, y 之间的关系,它含有x,y 两个变量;参数方程x= f( t )x,y 之间的关系,(t 为参数 )间接给出了曲线上点的坐标y= g( t)它含有三个变量t, x, y,其中 x 和 y 都是参数t 的函数.(2)联系:普通方程中自变量有一个,而且给定其中任意一个变量的值,可以确定另一个变量的值;参数方程中自变量也只有一个,而且给定参数t 的一个值,就可以求出唯一对应的 x, y 的值.这两种方程之间可以进行互化,通过消去参数可以把参数方程化为普通方程,而通过引入参数,也可把普通方程化为参数方程.2.圆的参数方程1.圆心在坐标原点,半径为r 的圆的参数方程如图圆 O 与 x 轴正半轴交点M0(r, 0).(1)设 M( x,y)为圆 O 上任一点,以 OM 为终边的角设为θ,则以θ为参数的圆 O 的参数方程是x=r cos θ(θ为参数 ).y=r sin θ其中参数θ的几何意义是 OM 0绕 O 点逆时针旋转到 OM 的位置时转过的角度.(2)设动点 M 在圆上从 M0点开始逆时针旋转作匀速圆周运动,角速度为ω,则 OM 0经过时间 t 转过的角θ=ωt,则以 t 为参数的圆 O 的参数方程为x= rcos ω t(t 为参数 ).y= rsin ω t其中参数 t 的物理意义是质点做匀速圆周运动的时间.2.圆心为 C(a, b) ,半径为 r 的圆的参数方程圆心为 (a,b),半径为 r 的圆的参数方程可以看成将圆心在原点,半径为r 的圆通过坐x= a+ r cos θ,(θ为参数 ).标平移得到,所以其参数方程为y= b+ r sin θ3.参数方程和普通方程的互化曲线的参数方程和普通方程的互化(1)曲线的参数方程和普通方程是在同一平面直角坐标系中表示曲线的方程的两种不同形式,两种方程是等价的可以互相转化.(2)将曲线的参数方程化为普通方程,有利于识别曲线的类型.参数方程通过消去参数就可得到普通方程.(3)普通方程化参数方程,首先确定变数x, y 中的一个与参数 t 的关系,例如x= f(t),其次将 x= f(t)代入普通方程解出 y=g(t),则x= f( t)(t 为参数 )就是曲线的参数方程.y= g( t)(4)在参数方程与普通方程的互化中,必须使x, y 的取值范围保持一致.二圆锥曲线的参数方程1.椭圆的参数方程椭圆的参数方程(1)中心在原点,焦点在 x 轴上的椭圆x2y2x= acos φ2+2=1(a>b>0)的参数方程是(φ是参a b y= bsin φ数) ,规定参数φ的取值范围是 [0, 2π ).22x= bcos φy x(2)中心在原点,焦点在 y 轴上的椭圆a2+b2= 1(a>b>0)的参数方程是y= asin φ(φ是参数) ,规定参数φ的取值范围是[0, 2π ).( x- h)2(y-k)2(3) 中心在 (h , k) 的椭圆普通方程为2+b 2=1,则其参数方程为ax= h+ acos φ(φ是参数 ).y= k+ bsin φ2.双曲线的参数方程和抛物线的参数方程1.双曲线的参数方程x2y2x= asec φ(1)中心在原点,焦点在x 轴上的双曲线a2-b2= 1 的参数方程是y= btan φ(φ为参数),规定参数φ的取值范围为φ∈ [0,2π )且φ≠ π,φ ≠3π.2222x= btan φy x(2)中心在原点,焦点在y 轴上的双曲线a2-b2= 1的参数方程是y= asec φ(φ为参数).2.抛物线的参数方程(1)抛物线 y2= 2px 的参数方程为x=2pt2(t 为参数 ).y=2pt(2)参数 t 的几何意义是抛物线上除顶点外的任意一点与原点连线的斜率的倒数.三直线的参数方程1.直线的参数方程x= x0+ tcos α(t 为参数 ).经过点 M0 (x0, y0),倾斜角为α的直线 l 的参数方程为y= y0+ tsin α2.直线的参数方程中参数t 的几何意义(1)参数 t 的绝对值表示参数t 所对应的点 M 到定点 M 0的距离.→→(2)当 M0M与e(直线的单位方向向量)同向时, t 取正数.当 M0M 与e反向时, t 取负数,当 M 与 M0重合时, t= 0.3.直线参数方程的其他形式对于同一条直线的普通方程,选取的参数不同,会得到不同的参数方程.我们把过点x= x0+ tcos αM0(x0,y0),倾斜角为α的直线,选取参数 t=M 0M 得到的参数方程(t 为参数 )y= y0+ tsin α称为直线参数方程的标准形式,此时的参数t 有明确的几何意义.b x=x0+ at一般地,过点 M0(x0,y0),斜率 k= (a,b 为常数 )的直线,参数方程为(t 为参a y=y0+ bt数) ,称为直线参数方程的一般形式,此时的参数t 不具有标准式中参数的几何意义.四渐开线与摆线(了解)1.渐开线的概念及参数方程(1)渐开线的产生过程及定义把一条没有弹性的细绳绕在一个圆盘上,在绳的外端系上一支铅笔,将绳子拉紧,保持绳子与圆相切,逐渐展开,铅笔画出的曲线叫做圆的渐开线,相应的定圆叫做渐开线的基圆.(2)圆的渐开线的参数方程以基圆圆心 O 为原点,直线 OA 为 x 轴,建立如图所示的平面直角坐标系.设基圆的半径为 r,绳子外端 M 的坐标为 (x, y),则有x= r( cos φ+φsin φ),(φ是参数 ).这就是y= r( sin φ -φcosφ)圆的渐开线的参数方程.2.摆线的概念及参数方程(1)摆线的产生过程及定义平面内,一个动圆沿着一条定直线无滑动地滚动时圆周上一个固定点所经过的轨迹,叫做平摆线,简称摆线,又叫旋轮线.(2)半径为 r 的圆所产生摆线的参数方程为x= r (φ-sin φ),(φ是参数 ).y= r ( 1- cos φ)。