以太网远程
EPSON机器人远程以太网说明
EPSON远程以太网远程以太网为EPSON标配的一项功能。
EPSON启用远程以太网,机器人只能做服务器(server),不能做客户端(client)。
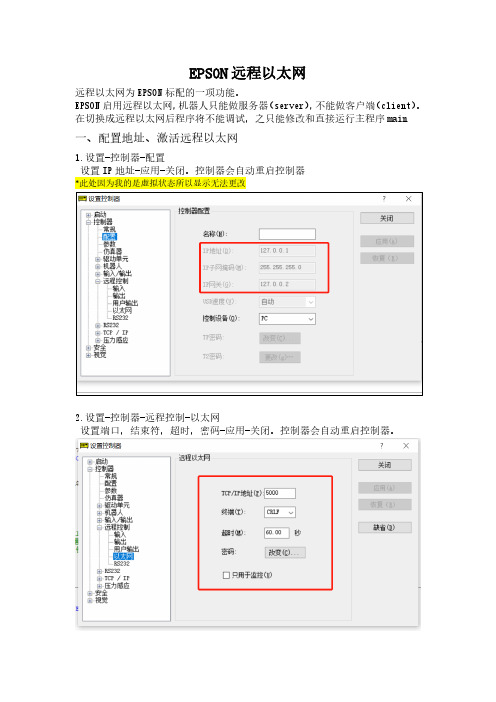
在切换成远程以太网后程序将不能调试,之只能修改和直接运行主程序main一、配置地址、激活远程以太网1.设置-控制器-配置设置IP地址-应用-关闭。
控制器会自动重启控制器*此处因为我的是虚拟状态所以显示无法更改2.设置-控制器-远程控制-以太网设置端口,结束符,超时,密码-应用-关闭。
控制器会自动重启控制器。
3.启动远程以太网设置-控制器-配置把控制设备切换成“远程以太网”-应用-关闭。
控制器会自动重启控制器。
二、以太网指令和格式* 所有命令必须以“回车”结束。
所有命令发送后机器人以:#命令,0回复为机器人执行命令成功例:发送$login,123456回复:#login,0 ,则表示登陆成功。
$Login 格式:$Login,密码 +回车 *返回:#login,0 已经登入成功。
$Logout 格式:$Logout +回车$Start,0 格式:$Start,Main程序编号 +回车$Start,1$Stop 格式:$Stop +回车$Pause 格式:$pause +回车$Continue 格式:$Continue +回车$GetStatus获取状态如下:#GetStatus,00100000001,000000100000001:Test/Teach/Auto/Warning/SError/Safeguard/EStop/Error/Paus ed/Running/Ready0000:错误/警告代码$Reset$SetMotorsOn,1$SetMotorsOff,1$SetCurRobot,1$GetCurRobot$Home,1$GetIO,10$SetIO,10,1$GetVariable,g_speed$SetVariable,g_speed,55$Execute,"Print Here"#Execute," X: 150.000 Y: 100.000 Z: -30.000 U: 90.000 V: 0.000 W: 0.000 /R /0"$Execute,"Motor On" 格式:$Execute,"执行的命令" 如:给机器人电机上电:$Execute,"Motor On"$Execute,"Go XY(150,100,-30,90)/R" *运行机器人$Execute,"Go Here+X(10)"$Execute,"go p1"$Execute,"p(10)=Curpos" $Execute,"SavePoints"robot1.pts"" $Execute,"Tool 1"以上只是部分指令,更多指令详见RC软件中的附带手册三、错误响应代码四、实际应用以一个通讯实例为例程序如下:程序运行会与调试助手互发数据1.激活远程以太网打开运行窗口-激活远程以太网激活完成“停止”可选到此远程以太网激活完成,可关闭RC软件2.输入指令,启动机器人程序机器人回复0,则启动成功另一边,程序已经运行并且已经和调试助手连接上,并可以相互收发数据这里举例启动程序,如果想通过远程指令直接移动机器人则不用发$Start,0,$Login完成后,可直接发$Execute,"Motor On"让机器人电机上电,上电后可直接按格式发移动指令。
莫克A E2200系列智能以太网远程I O说明书

ioLogik E2200SeriesSmart Ethernet remote I/O with Click&Go LogicFeatures and Benefits•Front-end intelligence with patented Click&Go control logic,up to24rules•Active communication with MX-AOPC UA Server•Saves time and wiring costs with peer-to-peer communications•Supports SNMP v1/v2c/v3•Friendly configuration via web browser•Simplifies I/O management with MXIO library for Windows or Linux•Wide operating temperature models available for-40to75°C(-40to167°F)environmentsCertificationsIntroductionMoxa’s ioLogik E2200Series Ethernet Remote I/O is a PC-based data acquisition and control device that uses proactive,event-based reporting to control I/O devices and features the Click&Go programming interface.Unlike traditional PLCs,which are passive and must poll for data,Moxa’s ioLogik E2200Series will,when paired with our MX-AOPC UA Server,communicate with SCADA systems using active messaging that is pushed to the server only when state changes or configured events occur.Additionally,the ioLogik E2200features SNMP for communications and control using an NMS(Network Management System),allowing IT professionals to configure the device to push I/O status reports according to configured specifications.This report-by-exception approach,which is new to PC-based monitoring,requires far less bandwidth than traditional polling methods.PC-Free Alarm and Control IntelligenceThis device supports simple yet powerful Click&Go™technology toconfigure event-driven reports and alarms delivered over email,TCP/UDP,or SNMP traps,giving you a powerful and effective tool fordelivering timestamped status updates in real time.With built-in Click&Go™intelligence,this device can be configuredfor simple outputs paired up with simple input triggers without theneed for a PC controller.This allows it to be configured toautomatically report I/O events according to conditions specified bythe user.SNMP for Ethernet Device ManagementBy using SNMP,IT engineers can configure the device to deliver alarms(traps)for specific I/O events,or use it to read or write directly to the I/O registers.For the strongest security,the device features SNMPv3,with authentication and encryption.With Moxa’s SNMP-capable I/O,even IT professionals can easily integrate industrial sensors and servos over an Ethernet backbone,and with its strong network management tools,it is ideal for a wide variety of industrial applications,including environmental monitoring,telecommunications,power production and delivery,and transportation.Push Technology for Events and AlarmsWhen used with MX-AOPC UA Server,devices can use active pushcommunications when communicating changes in state and/orevents to a SCADA system.Unlike a polling system,when using apush architecture for communications with a SCADA system,messages will only be delivered when changes in state or configuredevents occur,resulting in higher accuracy and lower amounts of datathat need to be transferred.SpecificationsControl LogicLanguage Click&GoInput/Output InterfaceAnalog Input Channels ioLogik E2240Series:8ioLogik E2242Series:4Analog Output Channels ioLogik E2240Series:2Buttons Reset buttonConfigurable DIO Channels(by software)ioLogik E2212Series:4ioLogik E2242Series:12Digital Input Channels ioLogik E2210Series:12ioLogik E2212Series:8ioLogik E2214Series:6Digital Output Channels ioLogik E2210/E2212Series:8ioLogik E2260/E2262Series:4 Isolation3k VDC or2k VrmsRelay Channels ioLogik E2214Series:6Rotary Switch0to9RTD Channels ioLogik E2260Series:6 Thermocouple Channels ioLogik E2262Series:8Digital InputsConnector Screw-fastened Euroblock terminal Counter Frequency900HzDigital Filtering Time Interval Software configurableDry Contact On:short to GNDOff:openI/O Mode DI or event counterPoints per COM ioLogik E2210Series:12channelsioLogik E2212/E2242Series:6channelsioLogik E2214Series:3channelsSensor Type ioLogik E2210Series:Dry Contact and Wet Contact(NPN)ioLogik E2212/E2214/E2242Series:Dry Contact and Wet Contact(NPN or PNP)Wet Contact(DI to GND)On:0to3VDCOff:10to30VDCDigital OutputsConnector Screw-fastened Euroblock terminalCurrent Rating200mA per channelI/O Mode DO or pulse outputI/O Type SinkOver-Current Protection0.65A per channel@25°COver-Temperature Shutdown175°C(min.)Over-Voltage Protection35VDCPulse Output Frequency1kHzDIO Output Leakage Current 4.0mA@24VDCRelaysConnector Screw-fastened Euroblock terminalContact Current Rating Inductive load:2A@30VDC,250VAC,110VACResistive load:5A@30VDC,250VAC,110VACContact Resistance100milli-ohms(max.)Electrical Endurance100,000operations@5A resistive loadMechanical Endurance1,000,000operationsMinimum Permitted Load1A@5VDCPulse Output Frequency0.3Hz at rated loadType Form A(N.O.)power relayI/O Mode Relay or pulse outputNote Ambient humidity must be non-condensing and remain between5and95%.The relaysmay malfunction when operating in high condensation environments below0°C. Analog InputsAccuracy ioLogik E2240/E2242:±0.1%FSR@25°C±0.3%FSR@-10to60°CioLogik E2240-T/E2242-T:±0.1%FSR@25°C±0.3%FSR@-10to60°C±0.5%FSR@-40to75°CBuilt-in Resistor for Current Input120ohmsConnector Screw-fastened Euroblock terminalI/O Mode Voltage/CurrentI/O Type DifferentialInput Impedance ioLogik E2240Series:900kilo-ohms(min.)ioLogik E2242Series:200kilo-ohms(min.)Input Range ioLogik E2240Series:±150mV,±500mV,±5V,±10V,0to20mA,4to20mAioLogik E2242Series:±150mV,0to150mV,±500mV,0to500mV,±5V,0to5V,±10V,0to10V,0to20mA,4to20mAResolution16bitsSampling Rate ioLogik E2240Series:All Channels:10samples/sec for voltage;6samples/sec for currentPer Channel:1.25samples/sec for voltage;0.75samples/sec for currentSingle channel:1.25samples/sec for voltage;0.75samples/sec for currentioLogik E2242Series:All channels:32samples/secPer channel:8samples/secSingle channel:100samples/secAnalog OutputsAccuracy ioLogik E2240:±0.1%FSR@25°C±0.3%FSR@-10to60°CioLogik E2240-T:±0.1%FSR@25°C±0.3%FSR@-10to60°C±0.5%FSR@-40to75°COutput Range0to10VDC4to20mAResolution12-bitRTDsAccuracy ioLogik E2260:±0.1%FSR@25°C±0.3%FSR@-10to60°CioLogik E2260-T:±0.1%FSR@25°C±0.3%FSR@-10to60°C±0.5%FSR@-40to75°CConnector Screw-fastened Euroblock terminalInput Connection2-or3-wireInput Impedance625kilo-ohms(min.)Sensor Type JPT100,JPT200,JPT500(-200to640°C)JPT1000(-200to350°C)NI100,NI200,NI500(-60to250°C)NI1000(-60to150°C)NI120(-80to260°C)PT1000(-200to350°C)PT50,PT100,PT200,PT500(-200to850°C)Resistance of310,620,1250,and2200ohmsResolution0.1°C or0.1ohmsSampling Rate All channels:12samples/secPer channel:2samples/secThermocouplesMillivolt Accuracy ioLogik E2262:±0.1%FSR@25°C±0.3%FSR@-10to60°CioLogik E2262-T:±0.1%FSR@25°C±0.3%FSR@-10to60°C±0.5%FSR@-40to75°CTC Accuracy Types J,T,E,S,B:±5°CTypes K,R,N:±8°CCJC Accuracy±0.5°C@25°C±1.5°C@-40to75°CConnector Screw-fastened Euroblock terminalInput Impedance1mega-ohms(min.)Millivolt Type±19.532mV±39.062mV±78.126mVFault and over-voltage protection:-35to+35VDC(power off);-25to+30VDC(poweron)Resolution16bitsSampling Rate All channels:12samples/secPer channel:1.5samples/secSensor Type J,K,T,E,R,S,B,NEthernet Interface10/100BaseT(X)Ports(RJ45connector)1Magnetic Isolation Protection 1.5kV(built-in)Ethernet Software FeaturesConfiguration Options Web Console(HTTP),Windows Utility(ioAdmin)Industrial Protocols CGI commands,Modbus TCP Server(Slave),Moxa AOPC(Active Tag),MXIO Library,SNMPv1Trap,SNMPv1/v2c/v3Management BOOTP,IPv4,SMTP,DHCP Client,HTTP,TCP/IPMIB Device Settings MIBTime Management SNTPLED InterfaceLED Indicators PWR,RDY,Serial,I/O StatusSerial InterfaceBaudrate1200bps to115,200kbpsConnector Terminal blockNo.of Ports1Parity NoneSerial Standards RS-485Stop Bits8Serial SignalsRS-485-2w Data+,Data-,GNDDIP Switch ConfigurationSerial Interface Fixed baudrateModbus TCPFunctions Supported1,2,3,4,5,6,15,16Mode ServerPower ParametersPower Connector Screw-fastened Euroblock terminalNo.of Power Inputs1Input Voltage12to36VDCPower Consumption ioLogik E2210Series:202mA@24VDCioLogik E2212Series:136mA@24VDCioLogik E2214Series:170mA@24VDCioLogik E2240Series:198mA@24VDCioLogik E2242Series:178mA@24VDCioLogik E2260Series:95mA@24VDCioLogik E2262Series:160mA@24VDC Physical CharacteristicsDimensions115x79x45.6mm(4.53x3.11x1.80in) Weight250g(0.55lb)Installation DIN-rail mounting,Wall mountingWiring I/O cable,16to26AWGPower cable,16to26AWGEnvironmental LimitsOperating Temperature Standard Models:-10to60°C(14to140°F)Wide Temp.Models:-40to75°C(-40to167°F) Storage Temperature(package included)-40to85°C(-40to185°F)Ambient Relative Humidity5to95%(non-condensing)Altitude2000m1Standards and CertificationsFreefall IEC60068-2-32EMC EN61000-6-2/-6-4Safety UL508EMI CISPR32,FCC Part15B Class AEMS IEC61000-4-2ESD:Contact:4kV;Air:8kVIEC61000-4-3RS:80MHz to1GHz:10V/mIEC61000-4-4EFT:Power:2kV;Signal:1kVIEC61000-4-5Surge:Power:1kVIEC61000-4-6CS:10VIEC61000-4-8PFMF1.Please contact Moxa if you require products guaranteed to function properly at higher altitudes.Shock IEC60068-2-27Vibration IEC60068-2-6DeclarationGreen Product RoHS,CRoHS,WEEEMTBFTime ioLogik E2210Series:213,673hrsioLogik E2212Series:217,722hrsioLogik E2214Series:307,329hrsioLogik E2240Series:155,941hrsioLogik E2242Series:204,391hrsioLogik E2260Series:327,282hrsioLogik E2262Series:341,063hrsStandards Telcordia SR332WarrantyWarranty Period ioLogik E2214Series:2years2ioLogik E2210/E2212/E2240/E2242/E2260/E2262Series:5yearsDetails See /warrantyPackage ContentsDevice1x ioLogik E2200Series remote I/ODocumentation1x quick installation guide1x warranty cardDimensionsOrdering InformationModel Name Input/Output Interface Digital Input Sensor Type Analog Input Range Operating Temp.ioLogik E221012x DI,8x DO Wet Contact(NPN),DryContact–-10to60°CioLogik E2210-T12x DI,8x DO Wet Contact(NPN),DryContact–-40to75°C2.Because of the limited lifetime of power relays,products that use this component are covered by a2-year warranty.ioLogik E22128x DI,4x DIO,8x DO Wet Contact(NPN or PNP),Dry Contact–-10to60°CioLogik E2212-T8x DI,4x DIO,8x DO Wet Contact(NPN or PNP),Dry Contact–-40to75°CioLogik E22146x DI,6x Relay Wet Contact(NPN or PNP),Dry Contact–-10to60°CioLogik E2214-T6x DI,6x Relay Wet Contact(NPN or PNP),Dry Contact–-40to75°CioLogik E22408x AI,2x AO–±150mV,±500mV,±5V,±10V,0-20mA,4-20mA-10to60°CioLogik E2240-T8x AI,2x AO–±150mV,±500mV,±5V,±10V,0-20mA,4-20mA-40to75°CioLogik E224212x DIO,4x AI Wet Contact(NPN or PNP),Dry Contact±150mV,0-150mV,±500mV,0-500mV,±5V,0-5V,±10V,0-10V,0-20mA,4-20mA-10to60°CioLogik E2242-T12x DIO,4x AI Wet Contact(NPN or PNP),Dry Contact±150mV,0-150mV,±500mV,0-500mV,±5V,0-5V,±10V,0-10V,0-20mA,4-20mA-40to75°CioLogik E22604x DO,6x RTD––-10to60°C ioLogik E2260-T4x DO,6x RTD––-40to75°C ioLogik E22624x DO,8x TC––-10to60°C ioLogik E2262-T4x DO,8x TC––-40to75°C Accessories(sold separately)SoftwareMX-AOPC UA Server OPC UA Server software for converting fieldbus to the OPC UA standardLCD ModulesLDP1602Snap-on module for the ioLogik E2200/R2100and ioMirror E3000Series©Moxa Inc.All rights reserved.Updated Nov12,2018.This document and any portion thereof may not be reproduced or used in any manner whatsoever without the express written permission of Moxa Inc.Product specifications subject to change without notice.Visit our website for the most up-to-date product information.。
Sophos SD-RED 20 SD-RED 60 远程以太网设备操作说明书
Operating Instructions SD-RED 20 / SD-RED 60ForewordWe are pleased to welcome you as a new Sophos SD-RED customer.Sophos SD-RED (Remote Ethernet Device) is the ideal solution to easily extend your secure network beyond your main facility to branch offices, retail outlets, and other remote locations.SD-RED devices are built on the latest enterprise-class, high-speed networking platforms, providing state-of-the art data encryption technology to securely transport your data over the internet.All configuration and management is done on a Sophos Firewall located at your main facility and requires no technical skills at the remote site.These operating instructions will help you install and configure the Sophos SD-RED device and provide technical specifications of all SD-RED models. In addition, please also see the following documents:ÌHardware Quick Start Guide: Connection to the system peripherals in a few stepsÌSafety Instructions: Notes on safety regulations and regulatory complianceÌSophos Firewall Administration Guides: Configuring your SD-REDappliance within the central Sophos SG UTM or XG Firewall applianceThe Hardware Quick Start Guide and the Safety Instructions are also delivered in printed form together with the hardware appliance. The instructions should be read carefully prior to using the device and should be kept in a safe place.You may download all user manuals and additional documentation from the support webpage at /support and from /get-started-sd-red. Security SymbolsThe following symbol and its meaning appears in the Hardware Quick Start Guide, Safety Instructions and in these Operating Instructions.Caution and Important Note. If these notes are not correctly observed:ÌThis is dangerous to life and the environmentÌThe device may be damagedÌThe functions of the device will be no longer guaranteedÌSophos shall not be liable for damages arising from afailure to comply with the Safety InstructionsDesigned UseSD-RED devices are developed for use in networks. They can only be operated in conjunction with a central Sophos Firewall but not as a standalone appliance. The hardware device can be used in commercial, industrial, and residential environments.SD-RED models belong to the appliance group B.The hardware appliance must be installed pursuant to the current installation notes. Otherwise failure-free and safe operation cannot be guaranteed. The EU declaration of conformity is available from the following address:Sophos Technology GmbHGustav-Stresemann-Ring 165189 WiesbadenGermanyCE Labeling, FCC and Approvals The SD-RED appliances comply with CB, CE, FCC, ISED/ICES, VCCI, RCM, UL, CCC, KC, Anatel.Important note: For computer systems to remain CE and FCC compliant, only CE and FCC compliant parts may be used. Maintaining CE and FCC compliance also requires proper cable and cabling techniques.Operating Elements and Connections SD-RED 20 / SD-RED 60*PoE LEDs (SD-RED 60 only)Status LEDs Power LEDs USB 3.0Port LEDs Micro-USBCOM port GbE WAN (WAN2 on SD-RED 60 only)Expansion Bay for optional Wi-Fi or 3G/4G module SFP 2 x Power supply 4 x GbE LAN USB 3.0* The displayed images is of the SD-RED 60 device. The SD-RED 20 device may vary slightly.Interfaces (front)Power and Port LEDsStatus LEDs* This LED pattern will only be seen once the tunnel is established.* The blinking behavior is an on/off cycle approx. once every 1.3 seconds. ** The blinking behavior is an on/off cycle approx. once every 2.5 seconds.Installation Preliminary steps Make sure that the SD-RED device has been shipped to the branch office/remote location. Ask the person who is going to put the SD-RED appliance into operation at the branch office to provide the unique SD-RED ID, which is printed on the bottom of the device. Note that the SD-RED device requires a working internet connection at your branch office.Configuring the SD-RED device Configure the SD-RED device in your central SG UTM or XG Firewall as described in the respective Sophos Firewall Administration Guides. After completion, the configuration will be uploaded to the cloud-based Sophos broker service.Connecting the SD-RED at the remote site Connect the SD-RED device to your router or cable at the remote site as described within the Quick Start Guide and power it on.After the system has booted, it will connect to the internet to retrieve its configuration from the Sophos broker service.The status LEDs “System,” “Router,” “Internet,” “Tunnel” should then turn on one after the other.If you don’t see all four status LEDs turned on or the “System” LED is blinking red, please refer to the LED table above to identify possible error states and contact your administrator.Important note: If all four status LEDs are blinking in a rotatory sequence the device is installing a new firmware version.DO NOT POWER IT OFF. The device will reboot automatically.Powering off the device at this stage could render it inoperable and require its return to the reseller.Connecting PoE power devices to a SD-RED 60On SD-RED 60 models, Ports LAN1 and LAN3 are able to provide power over ethernet (PoE) to a connected PoE device which conforms to the standards 802.3af (max. 15.4W) or 802.3at (max. 30W). Each port can provide up to 30 watts max. However, if PoE power is provided to both ports concurrently then the total power drawn should not exceed 30 watts. You can connect either one 802.3at or two 802.3af devices at the same time asshown below:Please consult the documentation of your PoE powered device to identify its correct power class.Important note: If you accidentally connect one 802.3at and one other 802.3at or 802.3af device at the same time, power for the device on LAN3 (lower priority) will be disabled and the connected device will lose power. The PoE LED of this port will start blinking, indicating a PoE power error, until you remove one of the devices from the LAN1 or LAN3 port (please also see PoE LED table above).Tunnel Router Internet System Tunnel Router Internet SystemTunnel RouterInternet SystemAdding an optional 3G/4G or Wi-Fi expansion moduleBoth SD-RED models have an expansion bay at the back allowing you to add either a Sophos 3G/4G or a Wi-Fi module, which are available from your Sophos partner.Both modules are shipped with two antennas (for 3G/4G or 802.11 ac 2x2 Wi-Fi). The wireless module allows you to connect wireless devices to your local LAN at the remote site.The 3G/4G module can be used as an alternative mobile WAN connection.For installation instructions, please refer to the documentation available at www.sophos. com/get-started-sd-red.Connecting devices to the SFP portBoth SD-RED models provide an SFP port which can be used to connect the unit to the local router/cable modem or other set-top box via fiber or other standard SFP mini-GBICs (transceivers).This port is a combo port shared with the WAN1 port. Therefore, you can only use one of these ports at any time.If cables are connected to both ports, the SFP port will take precedence.Using redundant power suppliesBoth SD-RED models are shipped with a single power supply, but provide a connectorto add a second redundant power supply, allowing you to keep your appliance up and running even if one power supply fails.The power LED for the respective power supply on the front of the device will only be activated once you have connected a second power supply for the first time, i.e. it will turn red in case the connected power supply fails or there is no power supply connected to the second connector at all.Serial consoleYou can connect a serial console to the Micro-USB COM port of the SD-RED devices. You can use, for instance, the HyperTerminal terminal program which is included with most versions of Microsoft Windows to log on to the appliance console. Use a Micro-USB to USB-A adapter cable to connect the console to your SD-RED device.The required connection settings are:ÌBits per second: 115,200ÌData bits: 8ÌParity: N (none)ÌStop bits: 1ÌFlow Control: N (none)Access via the serial console is activated by default on ttyS1. The connections of the appliances and the respective functionality are listed in the chapter “Operating Elements and Connections.”Mounting InstructionsThere are various options available allowing you to hang your SD-RED appliance onthe wall or mount it to a DIN Rail or into a rack. The following sections provide detailed instructions for the various options.Warnings and PrecautionsThe appliance can be operated safely if you observe the following notes and the notes on the appliance itself.Rack PrecautionsÌEnsure that the leveling jacks on the bottom of the rack are fully extendedto the floor with the full weight of the rack resting on them.ÌIn a single rack installation, stabilizers should be attached to the rack.ÌIn multiple rack installations, the racks should be coupled together.ÌAlways make sure the rack is stable before extending a component from the rack.ÌYou should extend only one component at a time – extending two ormore simultaneously may cause the rack to become unstable.General Server PrecautionsÌReview the electrical and general safety precautions that camewith the components you are adding to your appliance.ÌDetermine the placement of each component in the rack before you install the rails.ÌInstall the heaviest server components on the bottomof the rack first, and then work up.ÌAllow the hot plug hard drives and power supplymodules to cool before touching them.ÌAlways keep the rack‘s front door, all panels and server componentsclosed when not servicing to maintain proper cooling.Rack Mounting ConsiderationsÌAmbient operating temperature: If installed in a closed or multi-unit rackassembly, the ambient operating temperature of the rack environmentmay be greater than the ambient temperature of the room. Therefore,you should install the equipment in an environment compatible withthe manufacturer’s maximum rated ambient temperature.ÌReduced airflow: Equipment should be mounted into arack with sufficient airflow to allow cooling.ÌMechanical loading: Equipment should be mounted into a rack so that ahazardous condition does not arise due to uneven mechanical loading.ÌCircuit overloading: Consideration should be given to the connectionof the equipment to the power supply circuitry and the effect that anypossible overloading of circuits might have on overcurrent protectionand power supply wiring. Appropriate consideration of equipmentnameplate ratings should be used when addressing this concern.ÌReliable ground: Reliable grounding must be maintained at all times.To ensure this, the rack itself should be grounded. Particular attentionshould be given to power supply connections other than the directconnections to the branch circuit (i.e., the use of power strips, etc.).Wall mountYou can either hang the unit on the wall by using the wall mount keyholes on the rear of the unit or by using the rackmount kit which is available as an optional accessory.The following procedure explains how to use the keyholes.Please note: For wall mounting we recommend using wall plugs and screws with dimensions shown below:1. Use the wall mount template (next page) to mark thescrew mounting positions on the wall.2. Drill two wall anchors into the wall at the marked positions and screwtwo screws into them. Make sure they stand out 4-8mm. We recommendusing wall plugs and screws with the dimensions shown below.3.Hang the SD-RED unit on the wall by aligning the key holes with the mounted screws.WallTopSD-RED Wall mount template Do not shrink to fit when printingRackmountTo mount the SD-RED appliance to a rack (1U), you need the model specific rackmounting kit, which is available as an option from your Sophos partner.Please note: There are two different rackmounting kits available. Both kits fit with both models. However, only the SD-RED 60 specific kit provides additional bracket(s) to hold the desktop-type power adapter(s). These are not included with the SD-RED 20 specific kit since this model uses wall mount type power adapters which are directly plugged into the wall outlet or power strip.Make sure you only use the screws supplied with the rackmount ears. Using the wrong screws could damage the hardware appliance and would invalidate your warranty.In addition to the rackmounting kit contents, you will need a long-handed Phillips-head screwdriver.SD-RED 60 mounting instructions1. Remove existing screws from the chassisRemove the three screws from each side of the chassis.2. Install the rackmounting kit device holder to the chassisPlease note: You can mount the unit into a rack either with the front or with the back side facing to you (see figures below). Secure one device holder to each side of the appliance using three of the screws included with the box.3. Install the adapter bracketAttach the power adapter bracket either to the left or right side of the rackmounting kit by using four of the supplied screws. If you are using redundant power supplies fix the second adapter bracket on the other side.4. Install the power adapterPlace the adapter(s) on the bracket(s)The PADs supplied with the rackmount kit are only needed with SG 105/115 appliance models which use smaller power adapters (4a).For SD-RED 60 models a PAD is not required (4b).5. Install the unitYou can either install the unit into a rack (5a) or you can hang the unit on a wall (5b).Use appropriate screws (not supplied with this kit) for this purpose.For wall mount installation we recommend using wall plugs and screws withdimensions shown below (5c).5b. Wallmount installation5a. Rackmount installation5c.SD-RED 20 mounting instructionsThe required connection settings are:1. Remove existing screws from the chassisRemove the three screws from each side of the chassis.2. Install the rackmounting kit device holder to the chassisPlease note: You can mount the unit either with the front or with the back side facing to you (see figures below).Secure one device holder to each side of the appliance using three flat head M3 screws from the scope of supply.The device holders must only be fixed to the appliance by means of the supplied screws. Screws with other dimensions might damage the appliance.3. Install the unit3b. Wallmount installation3a. Rackmount installation3c.DIN Rail MountThe DIN rail mounting kit is available as an option from your Sophos partner.It includes:6 flat head M3 screws2 DIN rail mounting adapter 1. Install the mounting adapters to the chassisPlace one adapter on each side at the bottom of the chassis and secure it using three of the supplied screws.2. Mount the chassis to the DIN railHold the chassis to the DIN Rail and hang it with the fixed parts of the adapters on one side of the DIN Rail. Push the chassis towards the DIN Rail until the flexible part of the adapters snaps into the DIN Rail.Make sure the chassis is securely fixed.3. Removing the chassis from the DIN railTo remove the chassis from the rail just pull it back on the flexible side of the adapters.2.1.3.Operating Instructions SD-RED 20 / SD-RED 60© Copyright 2020-22. Sophos Ltd. All rights reserved.United Kingdom and Worldwide Sales Tel: +44 (0)8447 671131Email: ****************North American Sales Toll Free: 1-866-866-2802Email: ******************Australia and New Zealand Sales Tel: +61 2 9409 9100Email: ****************.au Asia Sales Tel: +65 62244168Email: ********************。
利用以太网实现FPGA的远程快速升级
2020,35(5)电子信息对抗技术Electronic Information Warfare Technology 中图分类号:TN791 文献标志码:A 文章编号:1674-2230(2020)05-0089-04收稿日期:2019-12-19;修回日期:2020-01-09作者简介:舒鹏飞(1988 ),男,硕士,工程师;苏敏(1988 ),女,硕士,工程师;李岚(1985 ),女,硕士,工程师㊂利用以太网实现FPGA 的远程快速升级舒鹏飞,苏 敏,李 岚(电子信息控制重点实验室,成都610036)摘要:采用传统的JTAG 方式升级存储于Flash 中的FPGA 配置程序,依赖专用的USB-JTAG 下载电缆,存在受设备环境限制,速率低,加载不稳定的问题㊂设计一种FPGA 远程快速升级方案㊂该方案中,PC 机先通过XVC 协议配置FPGA 为专用的升级电路,再通过以太网向Zynq 处理器发送所需升级的程序数据,Zynq 处理器通过LVDS 总线将数据导入FPGA 中,FPGA 校验数据并固化到Flash 中㊂工程实践证明该方案稳定㊁可靠且升级时间缩减到原来的1/10左右㊂关键词:远程快速升级;Zynq ;TCP /IP ;XVC 协议;LVDS DOI :10.3969/j.issn.1674-2230.2020.05.021Remote Fast Update of FPGA System Using EthernetSHU Pengfei,SU Min,LI Lan(Science and Technology on Electronic Information Control Laboratory,Chengdu 610036,China)Abstract :Designers usually store the FPGA program in Flash,the traditional method of updating such program is using a special USB-JTAG cable,this method is limited by the environment and equipment,rate is low and lack of stability.Aiming at these questions,a new scheme to achieve remote fast update of FPGA program is designed.Firstly,PC configures target FPGA as a special update circuit by means of Xilinx Virtual Cable (XVC)protocol.Then,PC sends update data to Zynq processer via ethernet,Zynq process sends these data to target FPGA via LVDS,FPGA ver⁃ify the data and program these data to flash memory.The experiments show that method is stable and reliable,and the update time could be reduced to one tenth.Key words :remote fast update;Zynq;TCP /IP;XVC protocol;LVDS1 引言程序升级是FPGA 系统的必备功能,XilinxVirtex-6/Virtex-7FPGA 由于配置所需的程序文件较大,通常存储在第三方Flash 芯片中,传统的升级手段是使用Xilinx 提供的仿真器,通过USB-JTAG 的方式进行㊂这种方式必须外挂仿真器,加载距离及稳定性受设备环境限制,且加载时间长㊂Xilinx 开放了XVC 通信协议[1],可以借助微处理器实现Ethernet -JTAG [2-3],解决了距离问题,但Flash 的加载速率没有得到改善㊂提高Flash 加载速率的一种解决办法是在电路中增加PowerPC 芯片或类似处理器作为辅助配置器件,在FPGA 中将PowerPC 的Local Bus 和Flash 的引脚接通,PowerPC 可以对Flash 进行读写操作,加载速率得到一定的提升[4],但这需要在FPGA 的功能程序中占用逻辑资源㊂针对上述问题,文中设计了一种FPGA 远程快速升级方案㊂在电路中增加一片Zynq 处理器,先通过XVC 协议配置FP⁃GA 为专用的升级电路,再通过此电路将升级程序数据快速固化到Flash 中㊂既解决了速度和距98舒鹏飞,苏 敏,李 岚利用以太网实现FPGA 的远程快速升级投稿邮箱:dzxxdkjs@离的问题,也无需在FPGA 功能程序中占用资源,且附加电路简单稳定,对于已定型的设计,只要对外提供4对LVDS 接口,也可通过母板进行转接,实现FPGA 程序的远程快速加载㊂2 硬件系统实现 在本设计中,Zynq 处理器PS(Processing Sys⁃tem)部分接收以太网中的FPGA 配置数据和Flash 程序数据,通过内部AXI4-Lite 总线发送到Zynq 处理器的PL(Programmable Logic)部分,PL 部分先模拟JTAG 接口时序,将目标FPGA 配置为专用的升级电路,再通过LVDS 总线将升级程序数据通过FPGA 固化到目标Flash 中㊂其系统框图如图1所示㊂图1 远程快速升级系统框图 远程快速升级功能电路的硬件部分主要由Zynq 处理器㊁以太网PHY 芯片㊁DDR3芯片组成㊂Zynq 处理器选择Xilinx 公司的XC7Z020芯片,PHY 芯片选用Marvell 公司的千兆网PHY 芯片88E1111㊂DDR3芯片选用MT41J256M8,用以提供Zynq 处理器运行Linux 操作系统所需的内存空间并缓存程序文件㊂Xilinx XC7Z020芯片配备双核ARM Cortex -A9处理器,该处理器与基于28nm Artix-7的可编程逻辑集成到一起,同时具有软件可编程㊁硬件可编程㊁IO 可编程的特性,可实现优异的性能功耗比和最大的设计灵活性㊂Xilinx 为Zynq 处理器提供了稳定的千/万兆以太网解决方案[5],PS 端ARM 处理器运行嵌入式Linux 操作系统,在Linux 内核中集成了千兆以太网控制器驱动,此驱动支持包括88E1111在内的常用以太网PHY 芯片㊂Zynq 处理器借助内部MIO(Multiplexed I /O )资源实现RGMII(Reduced Gigabit Media Independent Interface),完成Zynq 和PHY 之间的通信㊂在本设计中,以太网的数据传输速率为1Gbps,完全满足了远程程序升级的需求㊂在Zynq 处理器PL 端通过4根GPIO 模拟JTAG 时序,实现目标FPGA 的配置,再通过4组LVDS 总线实现待升级程序数据的传输㊂远程快速加载电路针对的目标FPGA 均为Xilinx Virtex-6/Virtex-7系列FPGA,且速度等级均在-1及以上,时序性能优良,TCK 配置速率可支持到66MHz [6]㊂综合各项因素后,在PL 端设置JTAG 串行传输速率为50MHz,实测只需要13秒左右就可以将目标FPGA(XV6VSX315T)配置为专用的升级电路㊂Zynq 处理器通过LVDS 将升级程序数据传送到目标FPGA,FPGA 接收数据后,进行CRC 校验并将无误的数据写入Flash 芯片指定位置,完成FPGA 系统的程序升级㊂3 软件设计3.1 XVC 协议XVC 协议是Xilinx 公司推出的基于TCP /IP的虚拟线缆协议,借助XVC 协议,Xilinx 的iM⁃PACT㊁Chipscope㊁Vivado 工具均可通过网络远程访问FPGA 的JTAG 接口,实现FPGA 的远程调试和配置㊂在本方案中,通过XVC 协议,将目标FPGA 配置为专用的升级电路㊂XVC 协议基本内容可总结为如下三条指令:getinfo:㊁settck:[period in ns]㊁shift:[num bits][tms vector][tdi vector]㊂其中前两条仅用于建9电子信息对抗技术·第35卷2020年9月第5期舒鹏飞,苏 敏,李 岚利用以太网实现FPGA 的远程快速升级立连接,shift 是XVC 协议的主要命令,num bits 部分指示单包数据的长度,tms vector 与tdi vector 则是本次Jtag 时序需使用的tms㊁tdi 数据,本地处理器通过bit-bang 的方式移出tms㊁tdi 的同时,会接收到同样长度的tdo 数据㊂图2 Zynq 平台XVC 流程图XVC 协议完全开源,本文将XVC 移植到Zynq 平台,在PC 端则通过批处理的方式在软件中调用Impact 进程,用以实现目标FPGA 的远程配置㊂Zynq 平台实现XVC 协议的流程如图2所示㊂Zynq 处理器一旦从网络数据中比对出shift:,则将后4个字节解析为num -bits,并读取相应字节数的tms vector 与tdi vector㊂Zynq 将tms㊁tdi 数据与tck 上升沿对齐送到目标FPGA,在tck 下降沿读取等长的tdo 数据组合为tdo vector,并发送回PC 端㊂PC 端impact 进程验证数据无误后,继续通过shift 指令发送下一包数据,直到完成所有目标FPGA 配置数据的传输,由PC 端关闭此次TCP /IP 连接㊂目标FPGA 会在接收到所有配置数据后,在几毫秒内配置为远程快速升级的专用电路㊂3.2 Flash 远程固化软件设计目标Flash 的远程固化需要在PC 端㊁Zynq 端㊁目标FPGA 端均定制软件㊂PC 端进行程序文件的切割并发送到以太网,Zynq 端进行数据的透传,实现Ethernet-LVDS 接口的转换,目标FPGA 此时已通过XVC 协议配置为专用升级电路,将实现LVDS 数据的接收㊁校验并写入Flash㊂PC 端上位机软件对远程升级操作进行全局控制,主要功能是待升级程序数据的读取㊁校验和发送㊂只要未识别到文件结束标志,每次均读取512Word 的程序数据,进行CRC 校验,将校验结果同原始数据一同打包发送到网络中㊂目标FP⁃GA 接收数据后进行本地校验并回复应答报文,明确数据传输是否出现异常,如果有误则触发重传,无误则进行下一包数据的读取和传输,直到所有程序文件均完成传输为止,关闭本次TCP /IP 连接㊂Zynq 端在远程快速升级流程中扮演Ethernet -LVDS 接口转换的角色,不进行数据处理,只做解包和打包的操作,进行数据透传㊂Zynq 处理器PS 端运行Linux 操作系统,运行TCP 服务器,对以太网数据进行处理,PL 端例化LVDS IP 核,实现和目标FPGA 的通信㊂图3 远程快速加载流程图目标FPGA 逻辑通过LVDS 接口接收程序数据,进行CRC 校验,并将符合要求的数据写入Flash 芯片㊂数据写入Flash 的速度是程序加载的速度瓶颈,同时也是FPGA 逻辑设计的难点所在㊂19舒鹏飞,苏 敏,李 岚利用以太网实现FPGA 的远程快速升级投稿邮箱:dzxxdkjs@Flash 芯片选用Micron 公司的JS28系列,此芯片提供了Buffer Program 的模式进行数据固化,缓存的数据量最大为512Word [7],此模式写入速度明显优于其它的写入模式㊂在本方案中,FPGA 逻辑为了实现最佳的数据写入速度,CRC 校验和单次写入Flash 数据量均设置为512Word㊂在一次Buffer Program 过程中,FPGA 首先向目标地址发送0xE8命令,Flash 芯片接收到此命令并准备到位后设置状态寄存器第7位SR7=1,FPGA 持续查询SR7并在它被置1后向目标地址发送0x200,知会Flash 芯片即将写入的数据总量为512个字㊂此后,FPGA 依次送出地址信息和其对应的数据信息,重复512次以写完本次缓存的所有数据,FPGA 再向初始目标地址发送0xD0命令,用以告知Flash 芯片Buffer Program 操作已经结束㊂Flash 确认此命令后开始将片内缓存的所有数据固化到内部存储空间,并在结束后设置相应的状态寄存器,完成一次Buffer Program 的操作㊂4 测试验证 为了验证远程快速升级的效果,目标FPGA 选用XC6VSX315T,生成升级过程所需的Bit㊁Bin 和Mcs 文件㊂其中Bit 文件用来将FPGA 配置为远程快速升级电路,Bin 文件是本文方案所需更新的目标程序文件,将被固化到Flash 中,Mcs 文件是传统的JTAG 方式升级程序所需的目标程序文件,用来和本方案对比㊂表1 XC6VSX315T 两种升级方式对比升级方式电缆距离/m 时间/s JTAG 方式USB-JTAG 电缆32149本文方式网线无限制202测量结果显示,通过传统JTAG 方式,使用USB-JTAG 电缆升级XC6VSX315T 的程序文件耗时2149秒㊂而在本文方案中,通过XVC 协议配置FPGA 耗时13秒,再通过专用电路更新Flash 耗时189秒,总用时202秒,效率提升约91%㊂同时本方案基于以太网,通过TCP /IP 协议对外通信,不需要使用专用的仿真器,升级距离和稳定性都得到了极大的提升㊂5 结束语 本方案中,基于Xilinx 的XVC 协议和自定义的通信协议,PC 机与Zynq 处理器通过以太网通信,Zynq 处理器与目标FPGA 通过JTAG 和LVDS 进行通信,实现了FPGA 程序的远程快速升级㊂该方案的实现需要一个Zynq 处理器,额外的附加电路少,在其他系统中应用时,可直接将Zynq 处理器固化到电路板上,加载效率可以更高㊂对于已经定型的设计,只要对外提供4对LVDS 接口,也可使用母板进行转接,将Zynq 处理器放到转接母板上,实现FPGA 程序的远程快速升级㊂参考文献:[1] Xilinx.XAPP1251v1.0Xilinx Virtual Cable Runningon Zynq-7000Using the PetaLinux Tools[DB /OL].(2015-4-30)..[2] 薛乾,曾云,张杰.基于XVC 网络协议的多FPGA 远程更新与调试[J].核技术,2015,38(12):33-37.[3] 赵赟.一种基于XVC 协议的FPGA 调试模块设计[J].舰船电子对抗,2019,42(4):109-112.[4] 黄勇.一种新型的FPGA 快速动态配置和远程加载技术[J].通信技术,2013,46(12):93-96.[5] Xilinx.XAPP1305v1.2PS and PL -based 1G /10GEthernet Solution Application Note[DB /OL].(2018-5-10)..[6] Xilinx.DS152v3.6Virtex-6FPGA Datasheet:DC and AC Switching Characteristics [DB /OL].(2014-3-18)..[7] Micron.Micron Parallel Nor Flash Embedded MemoryP30-65nm Datasheet Rev.D [DB /OL].(2013-5-17).http://.欢迎投稿 欢迎订阅29。
基于CAN总线和以太网的远程监控系统设计
等各 个层 次 的网络 平 台。 以太 网以其 能便捷 地访 问远
然而 , 随着计算机 、 控制 、 通信 、 网络等信息技术的 发展 , 信息交换 的领域 已经覆盖了工厂 、 企业乃至世 界各地的市场 。为实现工业企业 的综合 自动化 , J 需
要 建立 包含 从工业 现 场 设 备 层 到企 业 控 制 层 、 理 层 管
Z AOHa,L hn-n L ag H o I egj , U G n S i
( ol eo Mehncl n l tcl n i eigN r w s r o tcn a U i r t, ia 10 2 C i ) C l g f c ai dEe r a E g er , ot et nP leh i l nv sy X’n7 07 , hn e aa ci n n h e y c ei a
基于CAN总线的以太网互联中央空调远程控制系统的运用

关键词 : 中央空调; 远程控制; AN; C 以太 网; 互联转换
引 言
当前 , 中央空调控制系统是智能建筑 中不可或缺 的部分 。 传 统的控 制方 式是采用 直接数控制器 ( D ) D C 方式, 将各个温度 、 湿度监测点和控 制点连接 到一台或多台 D C上 , D 实行多点实时
2 C N网 络 的 组 建 A
C N总 线 是 一 个 设备 互 联 总线 型 控 制 网络 。住 总 线 上 以 A 挂接 多达 10个 设 备节 点 , 设 备 之 间 可 以 自土 相 互 通 信 , 现 1 各 实 复杂 的 网络 控 制 。 虑 到 可靠 性 和 成本 问题 , A 网络 r系 统 中 考 C N 单元 控制 器采 用 P7 5 1作 为 节 点 的 微 控 制 器 , A 8C 9 C N收 发 器 采 用 P A 2 2 0 8 C 9 是 P IIS半 导 体 公 司推 出 的 带 有 存 C 8 C 5 。P 7 5 1 H LP 片 C N 控 制 器 SA10 的 新 型 微 控 制 器 ,C 2 2 0 是 A J 00 P A8 C 5 P IIS开 发 的 高性 能 C N总 线 收 发器 。 H LP A 图 2所 示 为 C N网络 接 口硬 件 电路 原理 图 。 电路 要 f 3 A 该 } ] 部分 构 成 : 控 制 器 P 7 5 1C N总线 收发 器 P A 2 2 0干 微 8C 9 、 A C 8C 5 ¨ 速 光 电耦合 6 17 N 3 。微 处 理 器 P 7 5 1 8C 9 负责 C N控 制 器 内核 的 A 初始化, 通过 其 C N 内核 实现 数 据 的接 收 和发 送 等通 信 任 务 。 A
监 控 。 现 代 智 能 建 筑 楼 层 较 多 , 调 风 机 需位 于 不 同楼 层 且 数 空 量 多 , 湿 度 监 测 点 分 布 各 个 房 问 的 特 点 , 用 D C方 式 进 行 温 采 D 控 制 具 有 引 线过 长 、施 工 不 便 及 系 统 通 信 的 实 时 性 和 可 靠 性 不
局域网组建方法使用VPN技术实现远程办公与数据传输
局域网组建方法使用VPN技术实现远程办公与数据传输随着信息技术的不断发展,很多企业开始意识到传统的办公模式存在的一些问题,例如办公空间的限制和地理位置的限制。
为了解决这些问题,越来越多的企业开始采用虚拟专用网络(VPN)技术来搭建局域网,以便实现远程办公和数据传输。
本文将介绍局域网组建方法,并探讨使用VPN技术实现远程办公和数据传输的一些优势。
一、局域网组建方法局域网是一个较小的、局部范围内的计算机网络,用于连接同一地点的多台计算机。
在组建局域网时,有几种常见的方法可供选择,如以太网、Wi-Fi网络和VPN技术。
1. 以太网以太网是一种常见的局域网组建方法,它使用电缆或光纤将计算机连接到交换机或路由器,从而实现设备之间的互联。
以太网提供了快速且可靠的数据传输,适用于中小型企业或家庭办公网络。
2. Wi-Fi网络Wi-Fi网络是一种无线局域网组建方法,它使用无线信号将计算机连接到无线路由器。
Wi-Fi网络具有灵活性和便利性,适用于移动办公和对网络访问要求较高的场景。
3. VPN技术VPN技术是一种安全的局域网组建方法,它通过在公共网络上建立加密隧道,实现对远程办公和数据传输的安全访问。
VPN技术可以将分散的办公地点连接起来,并提供加密和身份验证等安全功能。
二、使用VPN技术实现远程办公远程办公是一种越来越流行的工作模式,它允许员工在不同的地点和时间进行工作。
使用VPN技术可以为远程办公提供安全可靠的网络访问。
1. 远程桌面VPN技术可以通过远程桌面功能,让员工通过互联网远程登录到公司内部网络,实现对办公电脑的远程控制和使用。
这样,员工可以在家中或任何其他地点,同样享受到在办公室工作时的体验。
2. 文件共享和协作使用VPN技术,企业员工可以通过加密的隧道连接到公司内部网络,实现文件共享和协作。
这样,员工们可以方便地共享文件、编辑文档,并实时协同工作,提高工作效率。
三、使用VPN技术实现数据传输数据传输是公司日常运营中必不可少的环节。
基于M-Bus和以太网的电缆远程监测系统设计

口科研设 计成 果 口
址 的方式来实现和 PC 8 2 8之 间 的通 信。每次 主机对 某一 I 1 F5 地址 呼叫 , 只有地 址相 符 的从机 才 可 以识 别 呼叫并 做 出相应 的响应 。而作 为 Matr 主机存 储各 温度 采集 器 的地 址 , s 的 e 并 根据 主控 机的请求 将得 到温度采集器的数据。
M-u B s主站 到从 站 的 数 据 流 传 输 是 通 过 电平 切 换 的 方 法
L C 2 0连接 , 于存 储数 据采 集器 的地 址 ; B s通信 接 口 P21 用 M—u 则 与上 一 节 所介 绍 的接 口电路 一 致 ; 以太 网 接 口芯 片采 用
R L 0 9 S L C 20 的 数 据 总 线 D ~ D 5 与 T 81A 。 P 2 1 O 1 R’ 09 SD 1 8 l A S o—S 1 I D 5连接 , 注意到 L C 2 0的 IO电压为 3 P21 / .
仪器 仪 表用户
网与现 场总线的转换和 现场数 据集 中 , 底层 总线采 用 M-u 。 Bs
单个数 据采集器 连接多个温度 传感器 和烟雾 传感器 。数据采 集 器 把 各 监 测 点 温 度 和 烟 雾 状 态 实 时 发 给 嵌 入 式 数 据 集 中 器, 然后 嵌入式数 据集 中器响 应监 测工 作站 的请 求上 传 。监
3 3 嵌 入 式 数 据 集 中 器 .
测工作站接入企业 网, 在企业 网任意节点 能通过 WE B方 式浏 览各监测点 。
3 硬件 电路 设计
3 1 M - u 简 介 . Bs
嵌入式数据集 中器采 用 L C 20作 为主控 制器 , P21 实现 与 监测工作站通信 以及收 集现场 数据 采集 器数据 。L C 2 0是 P 21
基于以太网的远程数据采集系统的开发

第一章引言1.1课程设计目的本次课程设计的主要目的,是让我们掌握工业生产过程中热工参数等数据采集系统的设计方法和热工过程中诸如温度、压力、流量、液位等参数的测量方法,以及工业以太网、数据采集系统结构、信号的获取、通信、远程数据采集模块及组态软件应用方法。
这次课程设计主要是培养我们独立分析和解决问题的工作能,以及综合运用所学知识进行实际工程设计的基本技能,查阅图书资料、产品手册和各种工具书的能力,工程绘图能力,初步编写技术报告的能力。
1.2课程设计内容本次课程设计的内容是以实验室热工自动化过程控制实验装置(型号:THJDL-1)为研究对象,选用研华公司ADAM-6000系列以太网I/O模块和MCGS组态软件,设计远程数据采集系统,完成实验装置中流量、压力、液位、温度四大热工参数的采集。
最终要达到的目的是通过这套系统,实现热工参数的远程采集。
1.3本人所参与的工作我在这次课程设计中担任的是组长,工作涉及到每一个方面,包括安排组员的任务,协调组员之间的工作内容等。
另外我收集了很多资料、最后的报告撰写我也参与了很大一部分的工作。
在MCGS软件的组态过程中,我与刘柳进行了很多的合作。
在实验室软件组态与接线过程中我也花费了相当多的精力,因为在这里我们遇到的问题是最多的,我们没有专门人员指导,所有的实验步骤都是我们自己摸索的,而且我们的实验老是不成功,软件与硬件不能通讯,我也联系了老师介绍给我们的技术员,但是问题依然没有得到彻底解决。
最后在我们组的共同努力下我们设计的数据采集系统终于采集到了有效的数据。
我也在这次设计过程中学习到了很多的新的有用的知识,在以后的工作中都是相当宝贵的。
第二章热工实验装置简介2.1热工自动化过程控制实验装置2.1.1对象系统的结构及组成“THJDL-1型热工自动化过程控制实验装置”是热工自动化控制实验的对象系统,实验系统的流程如图1 所示。
实验对象系统包含有:不锈钢储水箱;上水箱为有机玻璃圆筒型水箱;下水箱为不锈钢锅炉汽包;三相4.5kW电加热锅炉(由不锈钢锅炉内胆加温筒和封闭式外循环不锈钢冷却锅炉夹套构成)和铝塑盘管组成[1]。
EPSON机器人远程以太网说明
EPSON远程以太网远程以太网为EPSON标配的一项功能。
EPSON启用远程以太网,机器人只能做服务器(server),不能做客户端(client)。
在切换成远程以太网后程序将不能调试,之只能修改和直接运行主程序main一、配置地址、激活远程以太网1.设置-控制器-配置设置IP地址-应用-关闭。
控制器会自动重启控制器*此处因为我的是虚拟状态所以显示无法更改2.设置-控制器-远程控制-以太网设置端口,结束符,超时,密码-应用-关闭。
控制器会自动重启控制器。
3.启动远程以太网设置-控制器-配置把控制设备切换成“远程以太网”-应用-关闭。
控制器会自动重启控制器。
二、以太网指令和格式* 所有命令必须以“回车”结束。
所有命令发送后机器人以:#命令,0回复为机器人执行命令成功例:发送$login,123456回复:#login,0 ,则表示登陆成功。
$Login 格式:$Login,密码 +回车 *返回:#login,0 已经登入成功。
$Logout 格式:$Logout +回车$Start,0 格式:$Start,Main程序编号 +回车$Start,1$Stop 格式:$Stop +回车$Pause 格式:$pause +回车$Continue 格式:$Continue +回车$GetStatus获取状态如下:#GetStatus,00100000001,000000100000001:Test/Teach/Auto/Warning/SError/Safeguard/EStop/Error/Paus ed/Running/Ready0000:错误/警告代码$Reset$SetMotorsOn,1$SetMotorsOff,1$SetCurRobot,1$GetCurRobot$Home,1$GetIO,10$SetIO,10,1$GetVariable,g_speed$SetVariable,g_speed,55$Execute,"Print Here"#Execute," X: 150.000 Y: 100.000 Z: -30.000 U: 90.000 V: 0.000 W: 0.000 /R /0"$Execute,"Motor On" 格式:$Execute,"执行的命令" 如:给机器人电机上电:$Execute,"Motor On"$Execute,"Go XY(150,100,-30,90)/R" *运行机器人$Execute,"Go Here+X(10)"$Execute,"go p1"$Execute,"p(10)=Curpos" $Execute,"SavePoints"robot1.pts"" $Execute,"Tool 1"以上只是部分指令,更多指令详见RC软件中的附带手册三、错误响应代码四、实际应用以一个通讯实例为例程序如下:程序运行会与调试助手互发数据1.激活远程以太网打开运行窗口-激活远程以太网激活完成“停止”可选到此远程以太网激活完成,可关闭RC软件2.输入指令,启动机器人程序机器人回复0,则启动成功另一边,程序已经运行并且已经和调试助手连接上,并可以相互收发数据这里举例启动程序,如果想通过远程指令直接移动机器人则不用发$Start,0,$Login完成后,可直接发$Execute,"Motor On"让机器人电机上电,上电后可直接按格式发移动指令。
基于工业以太网的空压机远程监控系统设计

c o n t r o l l i n g or f a i r c o mp r e s s o r .B y t h e i n d u s t i r a l e t h e r n e t , d a t a e x c h a n g e a n d i n f o r ma t i o n s h a r i n g w a s r e a l i z e d i n t h i s s y s t e m a n d t h e
控 制 技 术 i C o r  ̄ r o l T e c h n o l o  ̄ l
基 于工 业 以太 网的 空压机远 程监控 系统设计
苑旭 阳’ 。王启 立 ’ ,何 敏 ,盛腾 飞 ’
( 1 . 中国矿业大学 化工学院 , 江苏 徐 州 2 2 1 1 1 6 ; 2 . 徐 州工程学 院 , 江苏 徐州 2 2 1 0 0 8 )
i n or f ma l i z a t i o n, n e t wo r k a n d d i g i t a l i z a t i o n o f mo n i t o in r g a n d c o n t r o l l i n g s y s t e m f o r a i r c o mp r e s s o r wa s i mp r o v e d .
基于NIOS Ⅱ的支持远程以太网ISP/IAP的SOPC网络终端

34 拷 贝回收算法 ( pn l co ) . Co ig Cபைடு நூலகம்l t r e
该 算法 的提 出是为 了克服句柄 的开销 和解 决堆碎片 的垃圾 回 收。它 开始时把堆分成 ・个对象 面和多个 闲面 。程序 从对象面 ’ 为对琢 分配守问 ,当对象满 丁,基 J o ig算法 的垃圾收集就从 c pn
行;因为要停 1 当前运 行年 序进行 内_整 理, 也需要耗 费很长的时 旱 行 效 率很低。
,
【】H retS hlt , 2 eb r e i 著 侯捷 译 . d 实战 C+ . 奇科技 出版 社. 1 9 . +上 99 [】Mie K enWi o 程序 员使用指南 DL 3 k li. n ws d - L和 内存管 理 . 清华 大
4 结束语
垃圾回收机制的产 生把程序 员从 手工回收垃圾内存的繁重工作 中解脱了出来,从而使之更能专心于程 序的总体设计和实现 ,加快 了程序开发的步伐。圆
参考文献
I]A de Al a de c t n r e n rsu著 .侯捷 .於毒 景译 .c +设计新思维 . i x + 华 中科技大 学出版社 . 2 0 . 03
会经 常被 回收,因而节省 了时问。
32 追踪回收算法 ( rcn l co ) . T a ig Col t r e
此 算法斛决 了环状 用的问题,并且在进行收集之前不会添加 I 仔何额外开销 ,它使 了根 集的概念 。基 于 t c g r i 算法 的垃 圾收 an 集器从根 集开始} 描。识别出哪些对 象可达,哪砦对象不可达,并 _ j 用某种 与式标记 司达对 象 ,例 如对每 个可达 对象设 置一个 或多个 ’ 位 在扫描识别过程 中。基 于 t c g 法的垃圾收集也称 为标记 r i 算 an 和清除 ( r —n ・ e p 垃圾收集器 。 ma a ds e ) k w
plc远程控制原理

plc远程控制原理PLC远程控制是指利用PLC控制器,通过远程通信技术(如以太网、无线通信等)实现对远程设备进行控制的原理。
具体原理如下:1. PLC控制器:PLC控制器作为核心设备,用于进行逻辑控制和数据处理。
它通常具有可编程的功能,并可根据预设的控制逻辑进行操作。
2. 远程通信模块:PLC控制器连接一个或多个远程通信模块,通过网络或无线通信的方式与远程设备进行通信。
常用的远程通信模块有以太网通信模块、GSM/GPRS通信模块等。
3. 远程设备:远程设备可以是任何需要远程控制的设备,如工业机器、仪器仪表等,这些设备通常具有接口(如数字输入、模拟输出等),可接收PLC控制器的指令并执行相应操作。
4. 控制指令传输:PLC控制器通过远程通信模块将控制指令传输到远程设备。
控制指令可以是开关信号、模拟量设定值等,通过远程通信模块将指令传输到设备的接口。
5. 设备响应:远程设备接收到PLC控制器传来的控制指令后进行响应。
根据指令的不同,设备会执行相应的操作,例如开关设备、调整设备参数等。
设备执行完操作后,可通过状态信号或反馈信号将结果返回给PLC控制器。
6. 数据交互:在远程控制过程中,PLC控制器和远程设备之间还可以进行数据交互,以实现监测、采集和分析等功能。
通过远程通信模块,PLC控制器可以周期性地读取远程设备的状态信息,如设备的工作状态、设备的数据值等。
总结起来,PLC远程控制原理即通过PLC控制器和远程通信模块实现与远程设备的通信,然后通过控制指令传输和设备响应实现对远程设备的远程控制。
同时,还可以进行数据交互,实现对设备状态的监测和数据的采集分析等功能。
ioLogik 2500系列智能以太网远程I O设备说明书

ioLogik2500SeriesSmart Ethernet remote I/O with Click&Go Plus logicFeatures and Benefits•Front-end intelligence with Click&Go Plus control logic,up to48rules•Active communication with MX-AOPC UA Server•Automatically complement disconnection period data with MX-AOPC UALogger software•4-port unmanaged switch built in for linking to Ethernet devices•I/O expansion port for daisy chaining up to8ioLogik E1200units•3-in-1serial port:RS-232,RS-422,or RS-485•Supports SNMP v1/v2c/v3•Simplifies I/O management with MXIO library for Windows or Linux•Wide operating temperature models available for-40to75°C(-40to167°F)environmentsCertificationsIntroductionioLogik2500smart Ethernet remote I/O devices feature unique hardware and software designs,making them ideal solutions for a variety of industrial data acquisition applications.The ioLogik2500’s hardware design includes a4-port unmanaged Ethernet switch and2serial ports, enabling it to seamlessly connect to a variety of field devices.One of the Ethernet ports can be used to link to8daisy-chained ioLogik E1200expansion modules to provide more than100channels.The ioLogik 2500acts as the“head”unit,with Click&Go Plus logic used to control the entire I/O array.Most importantly,a single IP is all that is required to connect the entire I/O array to your network,providing the perfect solution for industrial field sites that have an insufficient number of IP addresses. Programming-Free Click&Go Plus™LogicClick&Go Plus™control logic supports up to48rules and8conditions/actions.In addition,its graphical user interface provides3logic gates and3 multi-layers,helping you build more powerful and efficient IO solutions.Once you finish setting up your Click&Go Plus™logic rules,IOxpress’s easy-to-use simulation function can be used to find potential errors in your Click&Go Plus™rules before uploading them to your online devices. Multi-Protocol Data ConcentratorBy supporting multiple protocols,the ioLogik2500improves theefficiency of collecting field-site data and then sending it to upper-level systems.For field-site data collection,an ioLogik2500cancollect data from other third-party devices via both Modbus TCP andModbus RTU,and also lets you link up to8ioLogik E1200modules tocreate a versatile I/O array with over100different I/O channels,allowing all field-site data to be accessed by upper-level systems.Forthe upper-level systems,the ioLogik2500supports Modbus TCP,SNMP,SNMP Trap,RESTful API,Active OPC tag,and C++library foreasy integration with various IT/OT systems,making the ioLogik2500the perfect data concentrator for connecting field sites to yournetwork.Data Completeness with Local Storage Data LoggingThe ioLogik2500supports microSD cards,turning it into a powerful data logger for storing valuable data.Important data from field sites can be accessed remotely by different systems via an FTP,and the ioLogik's data completeness function enables real-time monitoring of data through MX-AOPC UA Suite when the network goes down unexpectedly.Remote Access Cellular I/O via Cellular NetworkMost carriers provide dynamic and private IP address SIM cards,andalthough private IP cards are cheaper,they cannot be used to providedirect access to the cloud.Moxa’s Cellular Data Access softwareenables this type of connection by establishing a special data routebetween the cellular models and the cloud.Only one public IP address is needed to use Moxa’s Cellular DataAccess software,allowing you to easily update internal registervalues,change output channel status,and modify the configurationsof devices connected to the device,all through the cloud.SpecificationsMemorymicroSD Slot Up to32GB(SD2.0compatible)Note:For units operating in extreme temperatures,industrial-grade,wide-temperaturemicroSD cards are required.Control LogicLanguage Click&Go PlusInput/Output InterfaceAnalog Input Channels ioLogik2542Series:4Digital Input Channels ioLogik2512Series:8Configurable DIO Channels(by software)ioLogik2512Series:8ioLogik2542Series:12Buttons Reset buttonIsolation3k VDC or2k VrmsDigital InputsConnector Screw-fastened Euroblock terminalCounter Frequency 2.5kHzDigital Filtering Time Interval Software configurableDry Contact On:short to GNDOff:openI/O Mode DI or event counterPoints per COM ioLogik2512Series:8channelsioLogik2542Series:6channelsSensor Type Dry contactWet Contact(NPN or PNP)Wet Contact(DI to COM)On:10to30VDCOff:0to3VDCDigital OutputsConnector Screw-fastened Euroblock terminalCurrent Rating500mA per channelDIO Output Leakage Current<1mA@30VDCI/O Mode DO or pulse outputI/O Type SinkOver-Current Protection 1.5A per channel@25°COver-Temperature Shutdown175°C(typical),150°C(min.)Over-Voltage Protection35VDCPulse Output Frequency5kHz(max.)Analog InputsAccuracy ioLogik2542Series(except-T models):±0.1%FSR@25°C±0.3%FSR@-10to60°CioLogik2542-T±0.1%FSR@25°C±0.3%FSR@-10to60°C±0.5%FSR@-40to75°CioLogik2542-GPRS-T/HSPA-T/WL1-EU-T/WL1-JP-T/WL1-US-T:±0.1%FSR@25°C±0.3%FSR@-10to60°C±0.5%FSR@-30to70°CBuilt-in Resistor for Current Input120ohmsConnector Screw-fastened Euroblock terminalI/O Mode Voltage/CurrentI/O Type DifferentialInput Impedance1mega-ohms(min.)Input Range±10VDC0to10VDC0to20mA4to20mA4to20mA(with burn-out detection)Resolution16bitsSampling Rate All channels:400samples/secPer channel:100samples/secEthernet Interface10/100BaseT(X)Ports(RJ45connector)4,1MAC address(Ethernet bypass)Magnetic Isolation Protection 1.5kV(built-in)Ethernet Software FeaturesConfiguration Options Web Console(HTTP/HTTPS),Windows Utility(IOxpress)Industrial Protocols CGI commands,Modbus TCP Client(Master),Modbus TCP Server(Slave),Moxa AOPC(Active Tag),MXIO Library,RESTful APIManagement ioLogik2500Series-GPRS/-HSPA/Ethernet models:BOOTP,IPv4,SMTP,SNMPv1/v2cTrap,SNMPv1/v2c/v3,TCP/IP,DHCP ClientioLogik2500Series-WL1models:BOOTP,IPv4,SMTP,SNMPv1/v2c Trap,SNMPv1/v2c/v3,TCP/IPMIB Device Settings MIBSecurity HTTPS/SSLTime Management SNTPLED InterfaceLED Indicators ioLogik2512/2542Series:PWR,RDY,Serial port(P1,P2),Ethernet port(L1to L4),I/OChannel Status(0to15)ioLogik2500Series-GPRS/-HSPA/-WL1models:PWR,RDY,Serial port(P1,P2),Ethernet port(L1to L4),I/O Channel Status(0to15),Wireless connection,Signal Status Security FunctionsIPsec VPN ioLogik2500Series-GPRS/-HSPA models:DES,3DES,AES-128,AES-192,AES-256 Serial InterfaceBaudrate300bps to115.2kbpsConnector8-pin RJ45Data Bits5,6,7,8Flow Control None,RTS/CTS,XON/XOFFNo.of Ports2Parity None,Even,OddSerial Standards RS-232,RS-422,RS-485Stop Bits1,2Serial SignalsRS-232TxD,RxD,RTS,CTS,DTR,DSR,DCD,GNDRS-422Tx+,Tx-,Rx+,Rx-,GNDRS-485-2w Data+,Data-,GNDRS-485-4w Tx+,Tx-,Rx+,Rx-,GNDSerial Software FeaturesIndustrial Protocols Modbus RTU Client(Master)Cellular InterfaceBand Options ioLogik2500Series-HSPA models:UMTS/HSPA800/850/900/1900/2100MHzioLogik2500Series-GPRS/-HSPA models:Universal quad-band GSM/GPRS/EDGE850/900/1800/1900MHzCellular Antenna Connectors ioLogik2500Series-GPRS/-HSPA models:1SMA femaleSIM Control Voltage 1.8V,3VSIM Format Full sizeWLAN InterfaceReceiver Sensitivity for802.11b-97dBm@1Mbps-94dBm@2Mbps-92dBm@5.5Mbps-90dBm@11MbpsReceiver Sensitivity for802.11g-88dBm@6to24Mbps-85dBm@36Mbps-75dBm@48Mbps-70dBm@54MbpsModulation Type DSSSOFDMTransmission Rate802.11b:1,2,5.5,11Mbps802.11g:6,9,12,18,24,36,48,54MbpsTransmitter Power for802.11b18±1.5dBm@1to11MbpsTransmitter Power for802.11g18±1.5dBm@6to24Mbps17±1.5dBm@36Mbps16±1.5dBm@48Mbps16±1.5dBm@54MbpsWireless Security WEP encryption(64-bit and128-bit)WPA/WPA2-PersonalFrequency Band US:2.412to2.462GHz(11channels)EU:2.412to2.472GHz(13channels)WLAN Antenna Connector ioLogik2512-WL1/2542-WL1Series:1RP-SMA female Power ParametersPower Connector Screw-fastened Euroblock terminalNo.of Power Inputs1Input Voltage12to48VDCPower Consumption ioLogik2512Series:274mA@24VDCioLogik2512-GPRS Series:416mA@24VDCioLogik2512-HSPA Series:390mA@24VDCioLogik2512-WL1Series:328mA@24VDCioLogik2542Series:358mA@24VDCioLogik2542-GPRS Series:494mA@24VDCioLogik2542-HSPA Series:442mA@24VDCioLogik2542-WL1Series:406mA@24VDC Physical CharacteristicsHousing MetalIP Rating IP30Dimensions61x157x115mm(2.4x6.18x4.53in)Weight1,265g(2.79lb)Installation DIN-rail mounting,Wall mounting(with optional kit) Wiring I/O cable,16to26AWGPower cable,12to24AWGEnvironmental LimitsOperating Temperature Standard Models:-10to60°C(14to140°F)GPRS/HSPA/WL1-T models:-30to70°C(-22to158°F)ioLogik2512-T/2542-T:-40to75°C(-40to167°F) Storage Temperature(package included)-40to85°C(-40to185°F)Ambient Relative Humidity5to95%(non-condensing)Altitude2000mStandards and CertificationsEMC EN61000-6-2/-6-4EMI CISPR32,FCC Part15B Class AEMS All models:IEC61000-4-2ESD:Contact:4kV;Air:8kVIEC61000-4-4EFT:Power:1kV;Signal:0.5kVIEC61000-4-6CS:3VIEC61000-4-8ioLogik2500Series:IEC61000-4-3RS:80MHz to1GHz:10V/mIEC61000-4-5Surge:Power:1kVioLogik2500Series-GPRS/-HSPA/-WL1models:IEC61000-4-3RS:80MHz to1GHz:3V/mIEC61000-4-5Surge:Power:2kVHazardous Locations ATEX,Class I Division2Safety UL508DeclarationGreen Product RoHS,CRoHS,WEEEMTBFTime ioLogik2512Series:467,032hrsioLogik2542Series:375,439hrsioLogik2512-GPRS Series:403,452hrsioLogik2542-GPRS Series:403,087hrsioLogik2512-HSPA Series:378,154hrsioLogik2542-HSPA Series:378,154hrsioLogik2512-WL1Series:400,469hrsioLogik2542-WL1Series:331,222hrsStandards Telcordia SR332WarrantyWarranty Period5yearsDetails See /warrantyPackage ContentsDevice1x ioLogik2500Series remote I/OInstallation Kit1x cable holder with screw6x cap,plastic,for RJ45portCable2x RJ45-to-DB9console cableAntenna1x UMTS/HSPA(-HSPA models)1x GSM/GPRS(-GPRS models)1x Wi-Fi(-WL1models)Documentation1x quick installation guide1x warranty cardDimensionsOrdering InformationModel Name Input/Output Interface Wireless Standard Operating Temp. ioLogik25128x DI,8x DIO–-10to60°C ioLogik2512-T8x DI,8x DIO–-40to75°CioLogik2512-HSPA8x DI,8x DIOUMTS/HSPA+:five-band800/850/900/1900/2100MHzGSM/GPRS/EDGE:quad-band850/900/1800/1900MHz-10to60°CioLogik2512-HSPA-T8x DI,8x DIOUMTS/HSPA+:five-band800/850/900/1900/2100MHzGSM/GPRS/EDGE:quad-band850/900/1800/1900MHz-30to70°CioLogik2512-WL1-EU8x DI,8x DIO IEEE802.11b/g for wireless LAN-10to60°C ioLogik2512-WL1-EU-T8x DI,8x DIO IEEE802.11b/g for wireless LAN-30to70°C ioLogik2512-WL1-US8x DI,8x DIO IEEE802.11b/g for wireless LAN-10to60°C ioLogik2512-WL1-US-T8x DI,8x DIO IEEE802.11b/g for wireless LAN-30to70°C ioLogik2512-WL1-JP8x DI,8x DIO IEEE802.11b/g for wireless LAN-10to60°C ioLogik2512-WL1-JP-T8x DI,8x DIO IEEE802.11b/g for wireless LAN-30to70°C ioLogik25424x AI,12x DIO–-10to60°C ioLogik2542-T4x AI,12x DIO–-40to75°CioLogik2542-HSPA4x AI,12x DIOUMTS/HSPA+:five-band800/850/900/1900/2100MHzGSM/GPRS/EDGE:quad-band850/900/1800/1900MHz-10to60°CioLogik2542-HSPA-T4x AI,12x DIOUMTS/HSPA+:five-band800/850/900/1900/2100MHzGSM/GPRS/EDGE:quad-band850/900/1800/1900MHz-30to70°CioLogik2542-WL1-EU4x AI,12x DIO IEEE802.11b/g for wireless LAN-10to60°CioLogik2542-WL1-EU-T4x AI,12x DIO IEEE802.11b/g for wireless LAN-30to70°C ioLogik2542-WL1-US4x AI,12x DIO IEEE802.11b/g for wireless LAN-10to60°C ioLogik2542-WL1-US-T4x AI,12x DIO IEEE802.11b/g for wireless LAN-30to70°C ioLogik2542-WL1-JP4x AI,12x DIO IEEE802.11b/g for wireless LAN-10to60°C ioLogik2542-WL1-JP-T4x AI,12x DIO IEEE802.11b/g for wireless LAN-30to70°C Accessories(sold separately)SoftwareMX-AOPC UA Server OPC UA Server software for converting fieldbus to the OPC UA standardWall-Mounting KitsWK-51-01Wall-mounting kit,2plates,6screws,51.6x67x2mm©Moxa Inc.All rights reserved.Updated Nov12,2018.This document and any portion thereof may not be reproduced or used in any manner whatsoever without the express written permission of Moxa Inc.Product specifications subject to change without notice.Visit our website for the most up-to-date product information.。
以太网远程控制器

以太网远程控制器我们的以太网远程控制器型号为NE-WEB-IO,它是一款跨越于网络的输入输出控制设备,通用且灵活方便。
这款产品的主要特征是拥有25针功能引脚,在订购以太网远程控制器产品前只要具体明确告知我们需要的输入输出等情况,就可以保证收到的产品是适合用户需求的。
现有的以太网远程控制器的引脚模式包括TTL输入、TTL输出、AD输入和温湿度采集等,用户可以根据需要确定各种模式需要的通道数量,也可以向我们咨询。
以太网远程控制器的显著作用是在控制输入的时候,会有相应事件驱动的能力,也就是说在设备启动后,原本需要在现场监管控制操作的输入可以被消除了,取而代之的是在这款以太网远程控制器输入一定标准格式的指令,然后通过以太网或局域网就可以准确实现对远程事件的驱动。
综上来讲,这款NE-WEB-IO以太网远程控制器是一款网络IO控制设备,通过互联网,使用计算机打开网页的形式实现检测和控制远程设备。
其可以再局域网使用,也可以跨越网关在互联网中使用,以太网远程控制器支持数字量输入、数字量输出、模拟量输入,支持温湿度采集,并且可以支持串口间数据互转。
另外,网页形式不仅可以使用我们默认的样式,也可以根据用户需求去对网页进行编辑保存,从而使用自己的网页去操作控制,极大方便各种实际需求。
以太网远程控制器的产品特点如下:1)设备联网,随时随地监测和控制你的设备2)可跨越网关,真正实现互联网操作3)内置HTTP协议,打开网页即可实现自由观察和控制4)完善的密码验证机制,确保只有授权用户才能操作5)组合最多可达24路输入或输出通道,包括DI,DO,AD,DA,温湿度等6)内置SD卡功能,可通过Ftp方式上传网页文件,替换默认网页,轻松定制7)支持普通的串口服务器功能,TCP与RS232实现透明传输8)可工作于TCP client和TCP server模式,连接前密码认证9)多重可靠性设计,更强的防浪涌和抗干扰能力10)内置看门狗11)高速CPU,专用网卡芯片,保障系统稳定性和可靠性具体需求以太网远程控制器产品时,请提供给我们具体选型,所有支持的型号如下:1>NE-WEBIO-8I8O:8个输入端口,8个输出端口;2>NE-WEBIO-4I4O8A:4个输入端口,4个输出端口,8个AD端口;3>NE-WEBIO-4I4O4A4T:4个输入端口,4个输出端口,4个AD端口,4个温湿度端口。
基于以太网的嵌入式远程抄表系统设计

De i n o he e b d d r m o e m e e e d ng s s e s d n e h r t sg ft m e de e t t r r a i y t m ba e o t e ne
CHE Hu Z N i , HOU We ・ h o ,W E n — in 2 YA G a — u , IMi g ,YANG L n — n nc a IYo g q a g , N u n y L n o gf ’ a
第2 0卷 第 1 期
Vo .0 1 2
No 1 .
电 子 设 计 工 程
El cr n c De i n En i e r g e to i sg gn ei n
21 0 2年 1月
Jn 2 1 a. O2
基于 以太 网的嵌入 式远程抄 表系统设计
陈 辉 ,周文 超 , 永 强 。 魏 ,闰冠 宇 ,李 明 杨 龙 凡 - ,
(. 南 中 美铝 业 有 限 公 司 河 南 郑 州 4 2 7 ; . 1河 5 4 7 2中化 国 际 ( 股 ) 份 有 限公 司 北 京 10 4 ) 控 股 00 5 摘 要 :为 实现 远 程 统 计 电 量 , 自动 计 算 各 时 间段 综 合 电 价 , 低 用 电 费 用 , 高 经 济 效 益 , 据 D /65通 信 规 约 设 降 提 依 LT 4 计 出一 个 可 用 于 工 业 现 场 的基 于 以 太 网的 嵌 入 式 远 程 抄 表 系统 据 采 集 单元 采 用 以 A 9 S M9 6 S为 主 处 理 器 的 数 T lA 2 1 嵌 入 式 A M 工控 板 E 1 1 通 过 R 4 5总 线 读 取 数 字 电 表 的 实 时数 据 信 息 并 通 过 以 太 网 与 抄 表 中 心进 行 通 讯 。 R M9 6 , S8 以 太 网 完全 支持 T P I 议 而且 网络 结构 简 单 、 信 速 率 高 。 而 实现 了现 场采 集 与远 程 抄表 的 目的 。 C lP协 / 通 从 实验 结 果表 明 , 该 系统 能 方便 工 作 人 员 随 时 查 看 用 电情 况 , 其 进 行 统 计 、 析 以便 调 整 用 电 时 段 , 大 优 化 了用 电 量 的 时 空 分 布 , 对 分 大 与 传 统 的人 工 抄 表 方 法相 比 , 表 时 间 和 报 表 生成 周 期 分 别 提 高 2 %和 3 % 以上 , 过 运 行 时段 优 化 可 为 公 司 节 约 抄 0 0 通
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
以太网远程监控系统实现远程监测控制和管理技术设计开发2009-12-30 15:22:04 来源:与非网关键字:以太网嵌入式三星ARM7处理器远程监测随着网络通信技术的发展,以太网在工业控制领域的应用日趋广泛,基于以太网的远程监控系统实现远程监测、控制和管理的有效集成[2]。
使用远程监控系统通过网络对工业生产过程进行监测,及时了解现场信息,快速进行决策。
远程控制的关键技术在于如何解决工业现场设备的网络接入问题。
目前,主要有两种方法:一种是使用PC机通过PC机端口(如RS232、USB接口)或数据采集卡来采集数据同时提供网络接口[3],这种方法利用强大的PC机软件支持,容易实现网络通信功能,但是PC机端口资源有限,专用采集卡成本较高,难以推广;另一种就是在现场使用嵌入式系统实现网络接入,嵌入式系统具有功耗低、体积小、成本低、可靠性高、实时性强等特点,使用在工业控制现场比较合适。
本文将嵌入式技术和网络技术相结合,在现场利用嵌入式系统实现网络通信功能以实时传输液位信号和控制信号,在客户端PC机上通过套接字编程实现与现场嵌入式系统的远程通信,从而达到对远程液位的监控。
1 远程液位监控系统结构本文设计的远程液位监控系统结构如图1所示:其中,处理器芯片采用ARM微处理器S3C44B0X;S3C44B0X自带8路10位ADC进行A/D转换来采集液位数据,通过扩展DAC0832实现D/A转换以输出控制量;S3C44B0X连接10M以太网卡RTL8019AS,提供网络功能的硬件接口;μC/OS-Ⅱ移植到S3C44B0X上,提供操作系统的支持,方便了应用程序的开发和对整个系统的管理;嵌入式TCP/IP协议栈LwIP移植到μC/OS-Ⅱ平台上,实现对网络数据的软件处理,从而为嵌入式系统提供网络通信功能;远程PC机客户端登录到嵌入式系统服务器上,通过以太网实现两端数据的实时交互。
图1 远程液位监控系统结构图2 硬件介绍与设计三星的S3C44B0X微处理器芯片采用ARM公司16/32位ARM7TDMI RISC结构的CPU核,主频为66MHz,通过扩展一系列通用外围部件,提供丰富的外设功能。
它的存储系统具有8个存储体,每个有32MB的存储空间,通过nGCS0-7这8个片选来分配。
本文使用的设计方案中nGCS0接Flash 芯片AM29LV160DB,起始地址0x00000000,大小为2MB,nGCS6接SDRAM芯片HY57V641620ET-7,起始地址为0x0c000000,大小为8MB,nGCS3接RTL8019AS,起始地址为0x06000000。
RTL8019AS是一款高度集成的全双工以太网控制器,收发可同时达到10Mbps的速度;支持8位、16位数据总线,8个中断请求线可供选择;支持UTP、AUI和BNC的自动检测;内置16K的SRAM,用于数据缓冲,以256B为单位的分页结构,可以自行分配用于收发的分页的大小和位置,一般前12页用于发送缓冲,后52页用于接收缓冲;硬件自带收发CRC校验、FIFO逻辑队列等,减少了主CPU 处理网络数据的工作量。
S3C44B0X对RTL8019AS的操作主要集中在对网卡寄存器的读写和网卡内SRAM的处理。
3 软件设计3.1 基于嵌入式系统的服务器端程序设计3.1.1 S3C44B0X上μC/OS-Ⅱ的移植嵌入式操作系统μC/OS-Ⅱ可以运行于各种不同类型的微处理器上,其内核小、效率高,并且具有高度的模块化和可移植性,支持多任务实时调度,扩展后可支持网络功能、图形界面等,使得应用程序的开发更加简单,功能更加丰富。
在使用μC/OS-Ⅱ之前,要先将它移植到S3C44B0X上,移植工作主要包括三个方面[4]:(1)设置与处理器和编译器相关的代码,包括一系列数据类型的定义,开中断宏、关中断宏的实现,定义堆栈的生长方向;(2)用C语言编写6个操作系统相关的函数:OSTaskStkInit()初始化任务的堆栈结构,和5个钩子函数OSTaskDelHook()、OSTaskSwHook()、OSTaskStatHook()、OSTimeHook()、OSTaskCreateHook();(3)用汇编语言编写4个与处理器相关的函数:运行优先级最高的就绪任务函数OSStartHighRdy (),任务级的任务切换函数OS_TASK_SW(),中断级的任务切换函数OSIntCtxSw(),时钟节拍服务函数OSTickISR()。
3.1.2 μC/OS-Ⅱ上TCP/IP协议栈的实现LwIP(Light-weight IP)是瑞典计算机科学院(Swedish Institute of Computer Science)的Adam Dunkels等开发的一套开源的TCP/IP协议栈[5],LwIP在保持TCP/IP协议主要功能的基础上减少对RAM的占用,这使得它适合在低端嵌入式系统中使用。
LwIP协议栈在设计时已经把所有与硬件、操作系统、编译器等移植相关的部分独立出来,放在/src/arch目录下。
因此LwIP在μC/OS-Ⅱ上的实现就是修改这个目录下的文件[6]。
(1)与CPU、编译器相关的部分主要是cc.h、cpu.h、peRF.h文件中有关数据长度、字的高低位顺序等的定义,这些应该与实现μC/O S-Ⅱ时参数的定义保持一致。
另外,一般情况下C语言的结构体struct是4字节对齐的,但是在处理数据包的时候,LwIP使用的是通过结构体中不同数据的长度来读取相应的数据,所以,一定要在定义struct的时候使用_packed关键字,让编译器放弃struct的字节对齐。
(2)与操作系统相关的部分LwIP中需要使用信号量通信,所以在sys_arch.h、sys_arch.c中应实现信号量结构体sys_sem_t,和相关的信号量处理函数:包括创建一个信号量结构sys_sem_new(),释放一个信号量结构sys_sem_free(),发送信号量sys_sem_signal(),请求信号量sys_arch_sem_wait()。
LwIP使用消息队列来缓冲、传递数据报文,因此要在sys_arch.h、sys_arch.c中实现消息队列结构体sys_mbox_t,以及相应的操作函数:包括创建一个消息队列sys_mbox_new(),释放一个消息队列sys_mbox_free(),向消息队列发送消息sys_mbox_post(),从消息队列中获取消息sys_arch_mbox_fetch()。
LwIP中每个与外界网络连接的线程都有自己的timeout属性,即等待超时时间,移植工作需要实现sys_arch_timeouts()函数,返回当前正处于运行态的线程所对应的timeout队列指针。
LwIP中网络数据的处理需要线程来操作,所以需要实现创建新线程函数sys_thread_new()。
而在μC/OS-Ⅱ中,没有线程的概念,只有任务。
因此必须要把创建新任务的函数OSTaskCreate()封装一下,才可以实现sys_thread_new()。
(3)相关库函数的实现LwIP协议栈中用到了8个外部函数,主要是来完成16位数据的高低字节交换、32位数据的大小头对调、返回字符串长度、字符串比较、内存数据块拷贝、指定长度的数据块清零等功能,与系统或编译器有关,需要用户实现。
(4)网络设备驱动程序在LwIP中可以有多个网络接口,每个网络接口都对应了一个netif结构,这个netif包含了相应网络接口的属性、收发函数。
在网络设备驱动程序中主要就是实现四个网络接口函数:网卡初始化、网卡接收数据、网卡发送数据以及网卡中断处理函数。
3.2 PC机上客户端程序的设计VC++6.0环境下客户端程序实现包括以下几个部分:(1)建立客户端的Socket:客户端应用程序首先构造一个CAsyncSocket[7]对象CltSock,然后调用CltSock.Create()函数来建立CltSock实体。
(2)提出连接请求:客户端套接字CltSock通过调用CltSock.Connect(strAddr,nPort)函数向服务器套接字提出连接请求。
(3)传输数据:在客户端应用程序中重载消息处理函数OnReceive()和OnSend()。
在OnReceive()中通过调用CltSock.Receive()函数从服务器端接收数据;在OnSend()中通过调用CltSock.Send ()函数向服务器端发送数据。
(4)关闭连接:客户端套接字CltSock通过调用CltSock.Close()函数来关闭连接。
4 远程液位监控应用程序的开发本文设计完成的基于以太网的远程液位继电自整定PID控制系统,其控制算法在远端主机(客户机)上实现,两端通过TCP协议通信,本地的嵌入式系统(服务器)上一方面实现对网络数据的处理,一方面完成对液位高度的采集与控制;远端PC机上一方面处理网络上的实时数据,一方面通过PID计算出控制量,显示相关参数。
实时液位变化状况如图2所示,从图中可以看出,实际液位(红色曲线)能够稳定在液位设定值(蓝色曲线)处。
同时,从用户界面上既可以读出液位高度值,PID 自整定参数等,还可以改变液位高度设定值,从而真正实现了液位对象的远程监控。
图2 远程液位继电自整定PID控制效果图本文设计解决了在嵌入式系统中实现网络功能的问题,引入并实现了一种新的设计方案,即采用三星ARM7处理器S3C44B0X+Realtek的10M网卡RTL8019AS硬件组合,通过在μC/OS-Ⅱ操作系统内核的支持下,添加嵌入式TCP/IP协议栈LwIP,来实现网络通信的功能,与PC机客户端的Socket 通信,在此基础上开发了基于以太网的远程液位监控系统,达到了良好的控制效果。
可以看出,这类系统在远程监控中的具有良好的应用前景。
本文作者创新点:本文将嵌入式网络技术引入到工业过程远程监控领域,提出了自己的设计方案,并成功开发了一个远程液位监控系统。