uart fifo 流程
uart通信原理与程序

uart通信原理与程序UART(通用异步收发传输器)是一种串行通信协议,用于在电子设备之间传输数据。
它广泛应用于各种通信设备和嵌入式系统中,是实现设备间通信的一种基本方式。
本文将详细介绍UART的工作原理和编写UART通信程序的步骤。
一、UART的工作原理UART通信是一种简单的、异步的、串行通信方式。
它使用一个数据线(TXD)和一个时钟线(CLK)实现数据的收发。
UART通信的工作原理如下:1.数据传输格式:UART通信使用帧来表示一个完整的数据包,每个帧由起始位、数据位、校验位和停止位组成。
起始位是一个低电平信号,用来告诉接收方接下来的数据的开始。
数据位是实际要传输的数据,可以是一个字节或多个字节。
校验位用于检查数据的准确性,常用的校验方式有奇偶校验和循环冗余校验(CRC)。
停止位是一个高电平信号,用来表示数据的结束。
2.波特率:3.串行传输:UART通信使用串行传输方式,即每个bit按顺序依次传输。
发送方将数据一位一位地发送到TXD线上,接收方通过CLK线来同步数据的传输。
发送方和接收方都在预定的时钟频率下将数据从一个电平变为另一个电平,以便接收方正确地接收数据。
4.启动和停止:UART通信在数据的开始和结束位置需要一些额外的控制位来标识。
当数据传输开始时,发送方发送一个起始位(低电平),接收方通过检测起始位来确定数据传输的开始。
当数据传输完毕时,发送方发送一个或多个停止位(高电平)来表示数据的结束。
5.同步与异步:UART通信是一种异步通信方式,即发送方和接收方的时钟不同步。
发送方和接收方使用各自的时钟来同步数据的传输,接收方通过检测起始位和停止位来确定数据的开始和结束位置。
二、编写UART通信程序的步骤下面是编写UART通信程序的一般步骤:1.设置波特率:首先,需要设置UART的波特率,确保发送方和接收方使用相同的波特率。
波特率的设置通常是通过设置寄存器完成的,具体的方法可以参考芯片的数据手册。
fifo控制流程 -回复
fifo控制流程-回复FIFO(First-In-First-Out)控制流程是一种用于管理和处理数据的算法,其中最先进入系统的数据首先被处理。
这篇文章将深入探讨FIFO控制流程,并详细阐述其背后的原理和应用。
首先,让我们了解一下FIFO控制流程的背景。
在计算机科学领域,FIFO 是一种广泛应用的数据结构,用于管理和处理数据队列。
FIFO队列的特点是,最早到达队列的数据将首先被处理,即先进先出的原则。
FIFO控制流程在各种应用中都得到了广泛的应用。
例如,在操作系统中,FIFO控制流程用于管理进程调度。
当多个进程同时请求使用CPU资源时,操作系统根据FIFO原则将这些进程排队,并按照他们到达的顺序依次分配CPU时间片给予调度。
在现代网络通信中,FIFO控制流程也扮演着重要的角色。
例如,在路由器中,FIFO控制流程被用于管理数据包的传输。
当多个数据包同时到达路由器时,FIFO控制流程保证数据包按照到达的先后顺序进行处理和转发。
FIFO控制流程的实现通常依赖于队列数据结构。
队列是一种线性数据结构,采用先进先出的原则。
数据元素只能在队列的一端进入(称为队尾),而在另一端出队(称为队头)。
这样,当新的数据进入队列时,它们被添加到队尾,而队头的数据被提取出来。
在FIFO控制流程中,队列的常用操作包括入队(enqueue)和出队(dequeue)。
入队操作将新的数据元素添加到队列的末尾;而出队操作则将队头的数据元素删除并返回。
让我们进一步解释FIFO控制流程是如何工作的。
假设有一组需要处理的数据,我们可以使用队列数据结构保存这些数据。
当产生新的数据时,我们将其入队,同时确保早期到达的数据保留在队列的前面。
当我们准备处理数据时,我们从队头出队一个数据元素进行处理。
通过这种方式,我们保证了最早到达的数据首先被处理。
一旦处理完成,我们可以将该数据元素从队列中删除,然后继续处理下一个数据元素。
FIFO控制流程的实际应用非常广泛。
MCU通信协议FIFO实现的方法

MCU通信利用FIFO可以避免因数据量大而丢包的问题,今天通过一种自定义通讯协议格式,给大家讲述一下实现FIFO的方法。
1、概述在此之前,先来列举一下传统串口数据收发的不足之处:每接收一个字节数据,产生一次接收中断。
不能有效的利用串口硬件FIFO,减少中断次数。
应答数据采用等待发送的方法。
由于串行数据传输的时间远远跟不上CPU的处理时间,等待串口发送完当前字节再发送下一字节会造成CPU资源浪费,不利于系统整体响应(在1200bps下,发送一字节大约需要10ms,如果一次发送几十个字节数据,CPU会长时间处于等待状态)。
应答数据采用中断发送。
增加一个中断源,增加系统的中断次数,这会影响系统整体稳定性(从可靠性角度考虑,中断事件应越少越好)。
针对上述的不足之处,将结合一个常用自定义通讯协议,提供一个完整的解决方案。
2、串口FIFO串口FIFO可以理解为串口专用的缓存,该缓存采用先进先出方式。
数据接收FIFO和数据发送FIFO通常是独立的两个硬件。
串口接收的数据,先放入接收FIFO中,当FIFO中的数据达到触发值(通常触发值为1、2、4、8、14字节)或者FIFO中的数据虽然没有达到设定值但是一段时间(通常为3.5个字符传输时间)没有再接收到数据,则通知CPU产生接收中断;发送的数据要先写入发送FIFO,只要发送FIFO未空,硬件会自动发送FIFO中的数据。
写入发送FIFO的字节个数受FIFO最大深度影响,通常一次写入最多允许16字节。
上述列举的数据跟具体的硬件有关,CPU类型不同,特性也不尽相同,使用前应参考相应的数据手册。
3、数据接收与打包FIFO可以缓存串口接收到的数据,因此我们可以利用FIFO来减少中断次数。
以NXP的lpc1778芯片为例,接收FIFO的触发级别可以设置为1、2、4、8、14字节,推荐使用8字节或者14字节,这也是PC串口接收FIFO的默认值。
这样,当接收到大量数据时,每8个字节或者14个字节才会产生一次中断(最后一次接收除外),相比接收一个字节即产生一个中断,这种方法串口接收中断次数大大减少。
带fifo的串口发送器FPGA实现
带fifo的Uart发送器的FPGA实现FPGA使用Altera公司EP4C15F17C8N芯片,它的性能优越,支持大部分IP核使用。
常用它来学习NIOS II。
使用它实现带FIFO的串口。
首先,对uart的实现进行设计。
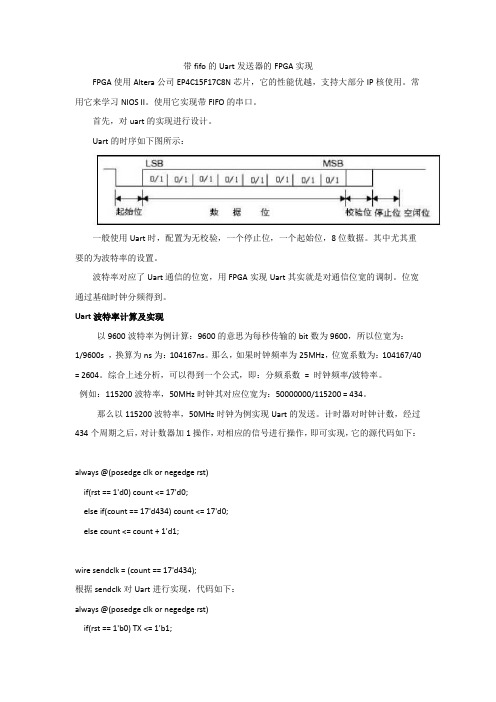
Uart的时序如下图所示:一般使用Uart时,配置为无校验,一个停止位,一个起始位,8位数据。
其中尤其重要的为波特率的设置。
波特率对应了Uart通信的位宽,用FPGA实现Uart其实就是对通信位宽的调制。
位宽通过基础时钟分频得到。
Uart波特率计算及实现以9600波特率为例计算:9600的意思为每秒传输的bit数为9600,所以位宽为:1/9600s ,换算为ns为:104167ns。
那么,如果时钟频率为25MHz,位宽系数为:104167/40 = 2604。
综合上述分析,可以得到一个公式,即:分频系数= 时钟频率/波特率。
例如:115200波特率,50MHz时钟其对应位宽为:50000000/115200 = 434。
那么以115200波特率,50MHz时钟为例实现Uart的发送。
计时器对时钟计数,经过434个周期之后,对计数器加1操作,对相应的信号进行操作,即可实现,它的源代码如下:always @(posedge clk or negedge rst)if(rst == 1'd0) count <= 17'd0;else if(count == 17'd434) count <= 17'd0;else count <= count + 1'd1;wire sendclk = (count == 17'd434);根据sendclk对Uart进行实现,代码如下:always @(posedge clk or negedge rst)if(rst == 1'b0) TX <= 1'b1;else if(FIFOempty == 1'b1) begin TX <= 1'b1; endelsecase(txcount)4'd0: TX <= 1'b0; //start bit is low4'd1: TX <= fifodata[0];4'd2: TX <= fifodata[1];4'd3: TX <= fifodata[2];4'd4: TX <= fifodata[3];4'd5: TX <= fifodata[4];4'd6: TX <= fifodata[5];4'd7: TX <= fifodata[6];4'd8: TX <= fifodata[7];4'd9: TX <= 1'b1; // stop bitsdefault: TX <= 1'b1 ;endcase它包含了一个有限状态机。
fifo算法c语言

fifo算法c语言FIFO算法C语言实现FIFO(First In First Out)算法是一种简单的页面置换算法,也称为先进先出算法。
该算法的核心思想是将最先进入内存的页面最先淘汰,即将页表中最早调入内存的页面移出内存。
本文将介绍如何使用C语言实现FIFO算法。
一、FIFO算法原理1.1 页面置换在操作系统中,为了提高程序运行效率,会将程序需要用到的数据和指令从硬盘上加载到内存中。
但是内存有限,无法容纳所有程序需要用到的数据和指令。
当内存不足时,就需要进行页面置换。
页面置换就是将当前正在使用但又不常用的页面从内存中移出,并将新的页面调入内存。
在进行页面置换时,需要选择一个合适的页面置换算法。
1.2 FIFO算法FIFO算法是一种简单而常用的页面置换算法。
它以队列为基础,将最早进入队列的页面作为被淘汰的对象。
具体来说,在FIFO算法中,操作系统会维护一个队列来记录当前正在使用的所有页面。
当需要进行页面置换时,操作系统会选择队头元素对应的页面进行淘汰,并将新调入内存中的页面插入队尾。
二、FIFO算法C语言实现2.1 算法流程FIFO算法的实现流程如下:1. 初始化页面队列,将所有页面按照调入内存的时间顺序依次插入队列;2. 当需要进行页面置换时,将队头元素对应的页面移出内存,并将新调入内存中的页面插入队尾;3. 重复执行步骤2。
2.2 代码实现下面是使用C语言实现FIFO算法的示例代码:```c#include <stdio.h>#include <stdlib.h>#define MAX_PAGE_NUM 100 // 最大页面数#define MAX_MEM_SIZE 10 // 最大内存容量int page_queue[MAX_PAGE_NUM]; // 页面队列int mem[MAX_MEM_SIZE]; // 内存int queue_head = 0; // 队头指针int queue_tail = -1; // 队尾指针// 初始化页面队列void init_page_queue(int page_num) {for (int i = 0; i < page_num; i++) {page_queue[i] = i % MAX_MEM_SIZE;}}// 页面置换函数void page_replace(int new_page) {int old_page = page_queue[queue_head]; // 获取被淘汰的页面mem[old_page] = new_page; // 将新页面调入内存中queue_tail = (queue_tail + 1) % MAX_PAGE_NUM; // 更新队尾指针queue_head = (queue_head + 1) % MAX_PAGE_NUM; // 更新队头指针}int main() {int page_num = 20; // 页面数int miss_count = 0; // 缺页次数init_page_queue(page_num);for (int i = 0; i < page_num; i++) {int page = page_queue[i];if (mem[page] == 0) { // 页面不在内存中miss_count++;page_replace(page);}}printf("缺页次数:%d\n", miss_count);return 0;}```2.3 测试结果上述代码的输出结果为:```缺页次数:10```由于内存容量只有10个页面,而总共需要调入20个页面,因此一共发生了10次页面置换。
uart串口通信电路设计 -回复
uart串口通信电路设计-回复UART(通用异步收发传输)是一种常用的串口通信协议,可以实现设备之间的数据传输和通信。
在本文中,将详细介绍UART串口通信电路的设计步骤。
一、什么是UART串口通信电路?UART串口通信电路是一种数字电路,用于将串行数据转换为并行数据,实现设备之间的数据传输和通信。
UART串口通信电路通常由发送电路和接收电路两部分组成。
发送电路:发送电路将并行数据转换为串行数据,并对数据进行格式化。
它通常由一个发送缓冲器、一个发送时钟和控制逻辑组成。
接收电路:接收电路将串行数据转换为并行数据,并对数据进行解码和处理。
它通常由一个接收缓冲器、一个接收时钟和控制逻辑组成。
二、UART串口通信电路的设计步骤1. 确定通信参数在设计UART串口通信电路之前,首先需要确定通信参数,包括波特率、数据位数、校验位数和停止位数等。
这些参数将决定串口通信的速率和精度。
2. 设计发送电路发送电路的主要任务是将并行数据转换为串行数据,并将数据发送到接收设备。
设计发送电路时,需要考虑以下几点:(1)发送缓冲器:发送缓冲器用于存储待发送的数据。
它通常由一个FIFO (先进先出)缓冲器实现,可以提高通信的效率。
(2)时钟和控制逻辑:发送电路需要一个时钟信号来同步数据传输,并且需要控制逻辑来控制数据的发送和处理。
(3)格式化:发送电路需要对数据进行格式化,包括数据位、校验位和停止位的配置。
格式化的目的是提高数据的准确性和可靠性。
3. 设计接收电路接收电路的主要任务是将串行数据转换为并行数据,并将数据传输到接收设备。
设计接收电路时,需要考虑以下几点:(1)接收缓冲器:接收缓冲器用于存储接收到的数据。
它通常由一个FIFO 缓冲器实现,可以提高数据的接收效率。
(2)时钟和控制逻辑:接收电路需要一个时钟信号来同步数据传输,并且需要控制逻辑来控制数据的接收和处理。
(3)解码和处理:接收电路需要对接收到的数据进行解码和处理,包括校验数据的正确性和提取有效数据。
UART硬件和软件验证流程
AN462硬件和软件验证流程Rev. _1 — 7 August 1987 应用规格书文件信息信息内容关键词UART,软硬件验证摘要这个流程是用于检验主机(控制处理器)、UART和印制电路板之间的信号、总线、电气连接和时序的正确性。
以下流程的执行和结果的验证不需要任何其它的测试设备(逻辑分析仪、协议分析仪,示波器等),它是基于处理器能够读写UART,并且所得到的结果能显示给操作者的假设之上的。
如果无法完全确认简单的读写操被正确的执行,那么针对UART连接的其它检验都是不可靠的。
1. 概述这个流程是用于检验主机(控制处理器)、UART和印制电路板之间的信号、总线、电气连接和时序的正确性。
以下流程的执行和结果的验证不需要任何其它的测试设备(逻辑分析仪、协议分析仪,示波器等),它是基于处理器能够读写UART,并且所得到的结果能显示给操作者的假设之上的。
如果无法完全确认简单的读写操被正确的执行,那么针对UART连接的其它检验都是不可靠的。
2. 总流程首先,对相关的寄存器进行写和读的操作,在这些操作中与时钟有关的有片选、读、写信号;其次,通过读取状态寄存器的值来观察所写入的几个控制寄存器的结果;接下来建议的几个流程用于验证总线数据流并采用“本地循环回送”的模式来验证接收器和发送器的运行,“本地循环回送”模式(所有的数据的发送和接收发生在UART内部)用于产生处理器中断或查询状态。
这些流程的正确执行将表明内部寄存器、总线接口、时钟发生器、计数器和振荡器的正常运行,没有得到验证的是振荡器的频率、TxD和 RxD与外部端口及普通输入输出管脚的连接。
3. 注释在硬件和软件的验证模式中,读取状态寄存器的状态是非常有效的,它对于检测那些在”已验证”过的硬件和软件上出现的“随机”或“少见”的错误也很有效。
状态的读取可以在对设备进行操作之前和之后进行,寄存器的内容将反映异常状况发生的时间地点,这将使得UART的内部状态与外部连接、时序、软件一样具有了可见性。
uart传输流程

uart传输流程UART传输流程什么是UART传输?UART(通用异步收发器)是一种常见的串行通信协议,用于在电子设备之间传输数据。
它通过发送和接收电平变化来传输数据,常用于连接微控制器、传感器和其他设备。
UART传输的基本流程UART传输过程中涉及到发送方和接收方两个角色。
下面是UART 传输的基本流程:1.数据帧:发送方将要传输的数据分成多个数据帧,每个数据帧包括一个起始位、若干数据位、一个校验位和一个或多个停止位。
2.起始位:数据帧的起始位用于通知接收方数据的传输即将开始。
起始位通常为低电平。
3.数据位:数据位是要传输的实际数据。
每个数据位的电平表示数据的值。
常见的数据位数有5、6、7和8位。
4.校验位:校验位用于验证数据的准确性。
发送方根据数据位的值计算校验位,并在数据帧中加入。
接收方将校验位与接收到的数据位进行比较,以检测传输错误。
5.停止位:停止位用于通知接收方数据帧的传输已经结束。
停止位通常为高电平。
6.波特率:波特率是UART传输中的重要参数,用于表示数据传输的速度,即每秒传输的位数。
常见的波特率值有9600、115200等。
UART传输的工作原理UART传输包含以下几个关键的工作原理:1.逻辑电平:UART传输使用高低电平表示数据位的值。
通常,高电平代表1,低电平代表0。
2.起始位检测:接收方通过检测起始位的下降沿来确定数据传输的开始。
3.时钟同步:发送方和接收方通过共享一个时钟信号来保持传输的同步。
接收方通过时钟信号来确定数据位的采样时间。
4.数据采样:接收方在每个数据位的中间采样数据的电平,并将其转换成对应的数据值。
5.错误检测:接收方通过比较校验位和接收到的数据位,检测传输过程中是否存在错误。
UART传输的应用领域UART传输由于其简单、可靠的特性,在许多领域得到了广泛应用,包括:•嵌入式系统:UART常用于嵌入式系统中的设备通信,如传感器数据的采集和控制命令的发送等。
•电子设备:UART用于连接计算机和外部设备,如打印机、调制解调器、数码相机等。
c语言 uart_fifo原理

c语言uart_fifo原理UART(Universal Asynchronous Receiver/Transmitter)是计算机系统中用于串行通信的器件,它能将并行数据流转化为串行数据流进行传输。
在UART中,FIFO(First In First Out)是一种缓冲区的实现方式,它用于临时存储数据,缓解发送方和接收方之间的速度差异。
当发送方将数据写入FIFO中,接收方可以从FIFO中读取数据。
FIFO具有先进先出的特点,保证了数据的顺序性。
下面是UART的FIFO原理:1. 发送方FIFO原理当发送方使用UART发送数据时,数据不能一次性发送完毕,需要等待数据发送完成后再发送下一组数据。
在这个过程中,发送方会将待发送的数据写入FIFO 缓冲区中,待传输结束后再从缓冲区中读取数据并发送出去。
发送方的FIFO缓冲区通常分为两个部分:发送缓冲区和传输寄存器。
当发送方写入数据时,数据会被暂时存储在发送缓冲区中,并在传输寄存器为空时被传输到目标设备中。
当发送结束后,缓冲区中剩余的数据将被清空。
2. 接收方FIFO原理当接收方使用UART接收数据时,串行数据流被读入接收缓冲区,然后再通过FIFO缓冲区进行存储。
这时数据的位置应该是从接收缓冲区拿出来之后,再存放到FIFO缓冲区中。
接收方FIFO缓冲区一般也分为两个部分:接收缓冲区和接收寄存器。
当串行数据流被读入接收缓冲区时,数据会被暂时存储,并在接收寄存器为空时被读入FIFO缓冲区。
当接收结束后,缓冲区中的数据将被清空。
需要注意的是,FIFO缓冲区的大小应该根据实际应用需求来定制。
如果缓冲区过小,在高速数据传输时会出现数据丢失的现象;如果缓冲区过大,会增加系统复杂度和不必要的资源浪费。
以上就是UART的FIFO原理的详细介绍,希望对你有所帮助!。
UART硬件和软件验证流程
AN462硬件和软件验证流程Rev. _1 — 7 August 1987 应用规格书文件信息信息内容关键词UART,软硬件验证摘要这个流程是用于检验主机(控制处理器)、UART和印制电路板之间的信号、总线、电气连接和时序的正确性。
以下流程的执行和结果的验证不需要任何其它的测试设备(逻辑分析仪、协议分析仪,示波器等),它是基于处理器能够读写UART,并且所得到的结果能显示给操作者的假设之上的。
如果无法完全确认简单的读写操被正确的执行,那么针对UART连接的其它检验都是不可靠的。
1. 概述这个流程是用于检验主机(控制处理器)、UART和印制电路板之间的信号、总线、电气连接和时序的正确性。
以下流程的执行和结果的验证不需要任何其它的测试设备(逻辑分析仪、协议分析仪,示波器等),它是基于处理器能够读写UART,并且所得到的结果能显示给操作者的假设之上的。
如果无法完全确认简单的读写操被正确的执行,那么针对UART连接的其它检验都是不可靠的。
2. 总流程首先,对相关的寄存器进行写和读的操作,在这些操作中与时钟有关的有片选、读、写信号;其次,通过读取状态寄存器的值来观察所写入的几个控制寄存器的结果;接下来建议的几个流程用于验证总线数据流并采用“本地循环回送”的模式来验证接收器和发送器的运行,“本地循环回送”模式(所有的数据的发送和接收发生在UART内部)用于产生处理器中断或查询状态。
这些流程的正确执行将表明内部寄存器、总线接口、时钟发生器、计数器和振荡器的正常运行,没有得到验证的是振荡器的频率、TxD和 RxD与外部端口及普通输入输出管脚的连接。
3. 注释在硬件和软件的验证模式中,读取状态寄存器的状态是非常有效的,它对于检测那些在”已验证”过的硬件和软件上出现的“随机”或“少见”的错误也很有效。
状态的读取可以在对设备进行操作之前和之后进行,寄存器的内容将反映异常状况发生的时间地点,这将使得UART的内部状态与外部连接、时序、软件一样具有了可见性。
UART接口说明

AIC
PMC
应用框图
串口寄存器
❖ 串口相关控制寄存器: ❖ 控制寄存器 US_CR ❖ 模式寄存器US_MR ❖ 中断使能寄存器US_IER ❖ 中断禁用寄存器US_IDR ❖ 中断屏蔽寄存器US_IMR ❖ 通道状态寄存器US_CSR ❖ 接收器保持寄存器US_RHR ❖ 发送器保持寄存器US_THR ❖ 波特率发生器寄存器US_BRGR ❖ 接收器超时寄存器US_RTOR ❖ 发送器时间保障寄存器US_TTGR ❖ FI DI比率寄存器US_FIDI ❖ 错误数目寄存器US_NER ❖ IrDA滤波寄存器US_IF
CTS0
清零后发送 I/O可以不用
AT91SAM7X256的I/O电 压为3.3V(5V兼容,可承 受5.5V输入),连接 时须注意电平的匹配。
与PC机相连时,由于 PC机串口是RS232电 平,所以连接时需要 使用RS232转换器。同 时需要,需要交叉线 路如右图。
TxD0
AT91SAM RxD0 7X256
TxD0 3232 AT91SAM RxD0 电平转换
7X256
TxD0
RxD0
其它 通信设备
TxD0
RxD0 PC机串口
USART框图
硬件握手通信通过RTS 与CTS 引脚自动管理溢出控制。 USART支持与使能由发送器到接收器的数据传输的外设数据控制器的连接。
PDC提供没有处理器干扰的链缓冲管理。
类型 输入 输出 输入
输入
输入
输出 输入 输出
描述
串行输入,接收数据
串行输出,发送数据
清除发送,指示外部modem的接收是否已经准备就绪。低电平 有效,表示UART1数据可通过TxD1发送。
fifo 复位时序
fifo 复位时序FIFO复位时序FIFO(先进先出)是一种硬件缓冲器,用于在数据传输过程中协调具有不同数据速率的设备。
为了确保FIFO的可靠操作,在重置过程中必须遵循特定的时序要求。
复位时序的基本原理:FIFO复写位通常是异步的,这意味着它们可以直接响应复位信号的断言或取消。
然而,FIFO内部逻辑的复位通常是同步的,需要一个时钟信号来触发。
FIFO复位时序步骤:1. 断言复位信号:向FIFO的复位输入引脚施加逻辑低电平,以初始化复位过程。
2. 保持复位信号断言:在复位期间,复位信号必须保持断言状态足够长的时间,以允许内部逻辑完全复位。
此时间称为复位保持时间(tRH)。
3. 启动时钟:一旦复位信号保持断言的时间等于或大于tRH,就可以启动时钟。
4. 复位时钟周期:在时钟开始后,FIFO需要几个时钟周期才能完成其内部复位过程。
此周期数称为复位计数(N)。
5. 取消复位信号:在时钟稳定且复位计数达到N后,可以取消复位信号,以完成FIFO的复位过程。
复位时序参数:要成功复位FIFO,必须满足以下时序参数:复位保持时间(tRH):复位信号保持断言状态的最小时间,以确保内部逻辑完全复位。
时钟起始时间(tCS):复位信号断言后允许时钟启动的最大时间。
复位计数(N):时钟开始后完成FIFO复位所需的时钟周期数。
不同类型FIFO的复位时序:不同类型的FIFO可能具有不同的复位时序要求。
例如,同步FIFO需要在时钟信号的上升缘或下降缘触发内部复位逻辑,而异步FIFO可以在任何时间响应复位信号。
复位时序设计注意事项:考虑FIFO的复位类型:确保设计的时序与FIFO的复位类型兼容。
遵守时序参数:严格遵守FIFO数据手册中指定的复位保持时间、时钟起始时间和复位计数。
使用复位门控:如果FIFO与其他设备共享时钟,可以使用复位门控来确保FIFO在复位期间与系统时钟隔离。
测试复位时序:在系统中实施FIFO时,进行彻底的测试以验证复位时序是否满足要求至关重要。
串口中断

串口编程(UART0)之中断方式---------------------------------------------------------from :/tigerjbEmail :jibo.tiger@---------------------------------------------------------三.中断方式的串口编程1.用中断方式编写串口程序由那几部分组成2.硬件上的支持1>UART0 发送FIFO缓冲区A. UART0含有1个16字节的发送FIFO缓冲区B. U0THR是UART0发送FIFO的最高字节C. UART的发送FIFO是一直使能的2>UART0接收FIFO缓冲区A. UART0含有一个16字节的接收FIFO缓冲区。
B. 软件设置接收FIFO缓冲区的触发字节。
3> 中断接口:UART0的中断接口包含中断使能寄存器(U0IER)和中断标识寄存器(U0IIR)。
l U0IIR:提供状态码用于指示一个挂起中断的中断源和优先级。
l U0IER可以控制UART0的4个中断源。
4> UART0有4个中断源:A. RLS(接收线状态)中断:(1) 优先级最高(2) 它在以下条件发生时产生错误l 帧错误(FE)l 溢出错误(OE)l 奇偶错误(PE)l 间隔中断(BI)注:Ø 可以通过查看U0LSR[4:1]中的值看到产生该中断的错误条件Ø 读取U0LSR寄存器时清除该中断。
B. RDA(接收数据可用)中断:(1)与CTI中断并列第二优先级。
(2)在以下情况触发中断:l 当接收的有效数据到达接收FIFO设置寄存器(U0FCR)中设置的触发点时,RDA 被激活。
当接收FIFO中的有效数据少于触发点时,RDA复位。
l 中断过程:1> 移位寄存器(U0RSR)从RxD引脚接收串行数据后,送入接收FIFO中2> 当接收FIFO中的有效数据数量达到预定的触发点时,置位RDA中断。
实验七、UART串行数据通信实验

实验七、UART串行数据通信实验1(查询与中断方式)一、实验目的通过实验,掌握UART查询与中断方式的程序的设计。
二、实验设备●硬件:PC 机一台●LPC2131教学实验开发平台一套●软件:Windows98/XP/2000 系统,ADS 1.2 集成开发环境。
●EasyARM工具软件。
三、实验原理EasyARM2131 开发板上,UART0 的电路图如图8.1 所示,当跳线JP6 分别选择TxD0和RxD0 端时方可进行UART0 通讯实验。
图8.1 UART0 电路原理图四、实验内容实验内容1使用查询方式,通过串口0 接收上位机发送的字符串如“Hello EasyARM2131!”,然后送回上位机显示,主程序以及各子程序流程如图8.2 所示。
(改写发送内容,字符个数不同)。
说明:需要上位机(PC机)串口终端如EasyARM.exe 软件。
使用串口延长线把LPC2131教学实验开发平台的CZ2(UART0)与PC机的COM1 连接。
PC 机运行EasyARM 软件,设置串口为COM1,波特率为115200,然后选择【设置】->【发送数据】,在弹出的发送数据窗口中点击“高级”即可打开接收窗口。
图8.2 串口实验相关程序流程图1.实验预习要求①研读LPC2000 UART工作原理与控制章节,注意FIFO 接收情况的特性。
②了解LPC2131教学实验开发平台的硬件结构,注意串口部分的电路。
2.实验步骤①启动ADS 1.2,使用ARM Executable Image for lpc2131工程模板建立一个工程DataRet_C。
②在user 组中的main.c 中编写主程序代码,在项目中的config.h 文件中加入#include <stdio.h>。
③选用DebugInFlash生成目标,然后编译连接工程。
④将EasyARM2131开发板上的JP6跳线分别选择TxD0和RxD0端时,方可进行UART0通信实验。
MICROCHIP MCP2140控制器 说明书

MCP2140特性•实现了IrDA®标准,包括:-IrLAP-IrLMP-IAS-TinyTP-IrCOMM(9线“Cooked”服务级别)•提供IrDA标准物理信令层支持,包括:-双向通信-实现CRC-9600 bps固定通信速率•包括UART-IrDA标准编/解码功能:-易于与业界标准的UART和红外线收发器连接•用于连接数据通信设备(Data Communications Equipment,DCE)或数据终端设备(Data Terminal Equipment,DTE)系统的UART接口•支持发送/接收格式(位宽):- 1.63 µs•硬件UART支持:-9.6 kbps波特率-29字节的数据缓存•支持的红外功能:-9.6 kbps波特率-64字节的数据包•作为从设备(Secondary Device)工作•自动低功耗模式-当没有IR活动(PHACT = L)时 < 60 µACMOS技术•低功耗而高速的CMOS技术•完全静态设计•低电压工作•工业级温度范围•低功耗- 3.0V和7.3728 MHz时 < 1 mA(典型值)封装类型结构框图2345678910123456789119181615141312111718171514131211101620OSC2OSC1/CLKIV SSV SSV DDV DDRXPDCDCTSRTSTXRXRI DSRDTRTXIRPHACTRESETNCRXPDREFV SSTXRXRITXIRPHACTRESETNCRXPDREFOSC2OSC1/CLKIV DDRXPDCDCTSRTSDSRDTRMCP2140MCP2140PDIP,SOICSSOP编码及协议TX TXIRRXRXPDMCP2140RTSCDCTSDSRDTRRIOSC1OSC2及解码RXPDREF处理器+-PHACT逻辑UART控制协议处理器电路波特率发生器通信速率为固定9600波特率的IrDA®标准协议栈控制器MCP2140MCP2140系统框图解码编码TXTXIRRXI/O MCP2140PICmicro ®SO SI U A R T波特率发生器UART 控制逻辑电路RXPD RXPDREF+-IR LEDIR 接收检测电路IR 光二极管RTS CTS DSR DTR CD RI PHACTU A R T 流I/O I/O I/O I/O I/O I/O 控制(1)M C P 2140 状态 (1)注1 :不要求单片机的所有I/O 引脚都连接到MCP2140。
uart的基本编程步骤

uart的基本编程步骤UART(通用异步收发传输)是一种常见的串行通信协议,用于在微控制器和外部设备之间进行数据传输。
下面是UART的基本编程步骤:1. 初始化UART,首先,你需要在微控制器上初始化UART模块。
这通常涉及设置波特率(通信速率)、数据位、停止位和校验位等参数。
这些参数的设置取决于你的具体应用需求和外部设备的要求。
2. 配置引脚,UART通常使用两个引脚进行数据传输,一个用于发送(TX),一个用于接收(RX)。
你需要在微控制器上配置这些引脚,并确保它们与外部设备正确连接。
3. 发送数据,要发送数据,你需要将要发送的数据加载到UART发送缓冲区。
一旦数据被加载,UART模块将自动开始发送数据。
你需要确保发送的数据符合UART的规范,并且在发送数据之前,需要检查发送缓冲区是否为空,以避免数据丢失。
4. 接收数据,接收数据与发送类似,你需要设置接收缓冲区,并在接收到数据后从中读取数据。
同样,你需要检查接收缓冲区是否有新的数据可用,以避免数据丢失。
5. 中断处理(可选),在一些情况下,你可能需要使用中断来处理UART的发送和接收。
这可以帮助你及时响应数据的到来或发送完成等事件。
6. 错误处理,最后,你需要考虑如何处理可能出现的错误,比如数据丢失、校验错误等。
这可能涉及到错误标志的检查和相应的处理流程。
总的来说,UART的基本编程步骤包括初始化UART模块、配置引脚、发送数据、接收数据、中断处理(可选)和错误处理。
在实际编程中,你需要根据具体的微控制器型号和外部设备的通信协议要求来进行相应的设置和处理。
fifo算法的工作过程
fifo算法的工作过程
FIFO(First-In-First-Out)算法是一种最简单的页面置换算法,通常用于操作系统中管理页面的缓存。
它基于先进先出的原则,即最先进入缓存的页面最先被替换出去。
以下是FIFO算法的工作过程:
1. 初始化:首先,初始化一个固定大小的缓存,以存储页面。
缓存的大小通常由系统或应用程序设置。
2. 页面访问:当一个新页面需要被加载到缓存中时,系统会检查该页面是否已经在缓存中。
-如果该页面已经在缓存中,系统认为这是一个缓存命中,不需要进行替换,直接使用该页面。
-如果该页面不在缓存中,系统进行下一步。
3. 页面替换:当缓存已满,而需要将新页面加载到缓存中时,FIFO算法会选择最早进入缓存的页面进行替换。
-算法维护一个队列,用于按照页面进入缓存的顺序排列。
新页面被加载时,加入队尾。
-当需要替换页面时,选择队首的页面进行替换,因为它是最早进入缓存的。
4. 更新队列:替换完成后,更新队列,将新页面移到队尾,保持队列的顺序。
FIFO算法的优点是实现简单,容易理解和实现。
然而,它也有一些缺点,其中之一是它可能导致"Belady's Anomaly",即增加缓存大小时缺页率反而增加。
这是因为FIFO算法只关注了页面进入的顺序,而没有考虑页面的访问频率或重要性。
因此,在某些情况下,FIFO算法可能不是最优的页面置换算法。
在实际应用中,其他更复杂的算法,如LRU(Least Recently Used)或LFU(Least Frequently Used),可能会更好地适应不同的场景。
【UART】LPC1700系列Cortex-M3_ZLG

UART基本操作
UART发送单元 发送单元内部结构
THR
发送移位寄存器
TxFIFO
UnTSR
发 送 单 元
(UnTSR)
发送保持寄存器
(UnTHR)
发送FIFO
UnTHR是发送FIFO的 最高字节。它包含了TX FIFO中的最新字符,可以通 过总线接口对其操作
UART基本操作
UART查询方式发送
uart波特率发生器的时钟源是apb时钟apb时钟经过16分频后将该值保存在除数锁存寄存器dlm与dlluart波特率设置波特率设置那么我们实际所得的波特率是否是精确的9600在公式usfdiv9600中计算结果小数部分被忽略掉实际的波特率为9615uart波特率设置波特率设置启用小数分频后uartn的波特率计算公式为
RS-232特性
最高速率约为20kb/s
传输最大距离约为15m 共模抑制比能力差
PC
RS232 电平 转换
打印机
UART功能应用
RS-485是一种常用远距离和多机通信的串行接口。RS-485只 是定义电压和阻抗,编程方式和普通串口类似,与RS-232主要区别 在于其特性。
RS-485特性
与TTL电平兼容 传输距离实际达1200m 共模抑制比能力强
清除自动波特率相关中断标志 UnACR[8:9]
如果发送的波特率不在这个范围, 则会出现波特率自动超时中断
执行自动波特率中断相关函数 UnIIR[8:9]
UART基本操作
手动波特率配置模式:
波特率设置
UART波特率发生器的时钟源是APB时钟, APB时钟经过16分频后将该值保存在除数锁存寄 存器DLM与DLL
DLM = Dlest[15:8] DLL = Dlest[7:0]
uart串口通信的基本原理和通信过程
UART串口通信的基本原理和通信过程UART(Universal Asynchronous Receiver/Transmitter)是一种常见的串口通信协议,用于在计算机和外部设备之间进行数据传输。
本文将详细解释UART串口通信的基本原理和通信过程,并提供一个全面、详细、完整且深入的解释。
1. UART串口通信的基本原理UART串口通信是一种基于异步传输的通信协议,它使用两根信号线(TX和RX)来实现数据的传输。
UART通信的基本原理如下:•数据位:UART通信中的每个字符由一定数量的数据位组成,通常为8位。
每个数据位可以表示一个字节(8位二进制数)。
•停止位:每个字符之后会有一个停止位,用于指示一个字符的结束。
通常情况下,UART通信中的停止位为1个。
•起始位:每个字符之前会有一个起始位,用于指示一个字符的开始。
通常情况下,UART通信中的起始位为1个。
•波特率:UART通信中的波特率(Baud Rate)表示每秒钟传输的比特数。
常见的波特率有9600、115200等。
UART通信使用的是异步传输,即发送端和接收端没有共同的时钟信号。
因此,在通信过程中,发送端和接收端需要事先约定好相同的波特率,以确保数据的正确传输。
2. UART串口通信的通信过程UART串口通信的通信过程包括数据的发送和接收两个步骤。
下面将详细介绍UART串口通信的通信过程。
数据发送过程1.发送端准备数据:发送端需要准备要发送的数据,并将数据存储在发送缓冲区中。
2.发送端发送起始位:发送端在发送数据之前,会先发送一个起始位,用于指示一个字符的开始。
起始位的电平通常为低电平。
3.发送端发送数据位:发送端按照数据位的顺序,将数据位的电平依次发送出去。
每个数据位的电平表示一个二进制位(0或1)。
4.发送端发送停止位:发送端在发送完所有的数据位之后,会发送一个停止位,用于指示一个字符的结束。
停止位的电平通常为高电平。
数据接收过程1.接收端等待起始位:接收端在接收数据之前,会等待接收到一个起始位的电平变化,用于指示一个字符的开始。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
uart fifo 流程
UART FIFO流程
一、引言
UART(通用异步收发传输器)是一种常用的串行通信协议,用于在嵌入式系统中实现设备之间的数据传输。
其中,FIFO(First In First Out)是一种常见的数据缓冲区,用于解决数据传输过程中的速度不匹配问题。
本文将介绍UART FIFO的工作原理和流程。
二、UART FIFO的概念
UART FIFO是一种先进先出的数据缓冲区,用于存储待发送或已接收的数据。
它的主要作用是解决数据传输过程中速度不匹配的问题。
当发送端和接收端的数据传输速度不一致时,FIFO可以暂时存储数据,以平衡两者之间的速度差异。
三、UART FIFO的工作原理
1. 发送端工作原理
当发送端有数据要发送时,数据首先被写入到FIFO缓冲区中。
如果FIFO缓冲区为空,则数据可以直接写入;如果FIFO缓冲区已满,则发送端需要等待,直到FIFO缓冲区有足够的空间。
发送端通过检查FIFO的状态位来确定是否可以写入数据。
2. 接收端工作原理
当接收端准备好接收数据时,它会从FIFO缓冲区中读取数据。
如
果FIFO缓冲区为空,则接收端需要等待,直到FIFO缓冲区有数据可读。
接收端通过检查FIFO的状态位来确定是否可以读取数据。
四、UART FIFO的流程
1. 发送端流程
(1)检查FIFO状态位,确定是否可以写入数据;
(2)如果FIFO缓冲区已满,则等待;
(3)将数据写入FIFO缓冲区;
(4)检查数据是否成功写入FIFO缓冲区;
(5)重复上述步骤,直到所有数据发送完毕。
2. 接收端流程
(1)检查FIFO状态位,确定是否有数据可读;
(2)如果FIFO缓冲区为空,则等待;
(3)从FIFO缓冲区中读取数据;
(4)检查数据是否成功读取;
(5)重复上述步骤,直到所有数据接收完毕。
五、UART FIFO的优势
1. 缓冲作用:FIFO缓冲区可以暂时存储数据,以平衡发送端和接收端之间的速度差异,避免数据丢失或溢出。
2. 提高效率:FIFO缓冲区允许发送端连续写入数据,而不需要等待每个字节的传输完成,从而提高数据传输效率。
3. 减少中断:FIFO缓冲区的存在可以减少中断次数,提高系统的响应速度。
六、常见问题
1. FIFO缓冲区的大小如何选择?
FIFO缓冲区的大小应根据实际数据传输需求来确定。
如果数据传输速度较快,建议选择较大的FIFO缓冲区,以避免数据丢失。
如果数据传输速度较慢,可以选择较小的FIFO缓冲区。
2. 如何处理FIFO溢出或下溢?
当FIFO缓冲区溢出或下溢时,可以通过中断或错误处理机制来处理。
例如,可以通过中断通知发送端停止发送数据,或通过错误处理机制重试数据传输。
七、总结
UART FIFO是一种常用的数据缓冲区,用于解决数据传输过程中速度不匹配的问题。
它通过缓冲数据,平衡发送端和接收端之间的速度差异,提高数据传输效率和可靠性。
在实际应用中,我们应根据具体需求选择合适的FIFO缓冲区大小,并处理可能出现的溢出或下溢情况,以确保数据的正确传输。