液压伺服系统控制PPT
伺服控制(电液伺服系统 )课件
(二)系统的闭环刚度特性
闭环惯性环节转折频率的无因次曲线
17
闭环振荡环节固有频率无因次曲线
当h和Kv/h较小时
nc h
18
当h和Kv/h较小时
2 nc 2 h — Kv / h
闭环振荡环节阻尼系数无因次曲线
19
系统频宽主要受h和h的影响 和限制,应适当提高h和 h , 但过大的 h会降低nc,影响响
应速度。
电液位置控制系统闭环频率特性曲线
4)只有在工作频率接近谐振频率h时才有稳定性问题。当工作频率 接近h时,负载压力且也将接近ps了,也就是说压力趋于饱和,Kc变得很
大,阻尼系数比较高。
14
P116页使系统满足一定稳定要求的参数估算
由于以上几点原因,估算时一般可用
Kv
h
3
电液位置伺服系统难于得到较大的幅值稳定裕量Kg,而相位稳定
裕量 易于保证。
6
位置比较用电压比较代替 缸
电液伺服阀 液压能源
样板 给定
xi 位移 ei 比较eg 电伺服 I
传感器
- 放大器
ef
力矩 马达
液压 放大元件
扰动
液压 xp
执行件
位移 传感器1
A 双传感器阀控位置控制系统
7
由计算机图 形代替样板
程序 ei 比较eg
给定
-
ef
电液伺服阀 液压能源
电伺服 i 放大器
力矩 马达
11
将电液伺服阀看成比例环节
Kv
Ke Kd Ka Ksv iDm
TL
K V ce
iD K m
4
s
t
1
e ce
i +
液压伺服和比例控制系统ppt

差) 经放大器放大后,加于电液伺服
阀转换为液压信号(图中A、b),以推
动液压缸活塞,驱动控制对象向消除偏
差方向运动。当偏差为零时,停止驱动,
因而使控制对象的位置总是按指令电位
图 7-9 统
电液伺服系
器给定的规律变化。
1-电位器;2-电液伺服阀;3-
液 压缸;4-负载;5-反 馈;
6-指令电位器;7-放大器
液压伺服和比例控制系统
第一节 液压伺服控制 第二节 电压比例控制
液压伺服阀
液压伺服阀是液压伺服系统中最重要、最基本的组成部分,它 起着信号转换、功率放大及反馈等控制作用。电液伺服阀是应用最广 泛的一种,它在接受电器信号模拟后,相应输出调制的流量和压力控 制信号,控制系统压力、流量、方向的变化。它既是电液转换元件, 也是功率放大元件,它能够将小功率的微弱电器输入信号转换为大功 率的液压能(流量和压力)输出。在电液伺服系统中,它将电气部分 和液压部分连接起来,实现电液信号的转换与液压放大。电液伺服阀 是电液伺服系统控制的核心。
量油增路加关,闭而,滑液阀压开缸x0口不量动逐,渐负减载少停。止当在x一0 增个加新到的
x0
位置
上
x时i ,则开口量为零,
,达到一个新的平
衡状态。
号继续如向果右继运续动给。控反制之滑,若阀给向控右制的滑输阀入输信入号一个x负i ,位液移压x缸i 就0会(向跟左随为这负个)信
液压伺服阀系统
反液之压缸,若就给会控跟制随滑这阀个输信入号一向个左负运位动移。xi 0 (向左为负)输入信号,则
液压伺服阀
3〕射流管式伺服阀
组成:如图7-3所示,采用衔铁式力矩马达8带动 射流管及其接收口2,两个接收口直接和滑陶阀 芯5两端面连接,控制滑阀阀芯运动。滑阀陶芯 5靠一个板簧定位,其位移与滑阀阅芯两端压力 差成比例。
液压伺服系统工作原理及实例PPT课件

电液伺服阀
工作台
xf
放大器
uf Δu
反馈电位器 xo +E
ug
指令电位器
xg
双电位器位置控制电液伺服系统
.
12
4、液压伺服控制系统举例
电液伺服阀处于零位,没有 流量进出系统,工作台不动. 当指令电位器向右移动一个 位移△U=K △Xg, 经放大去 控制电液伺服阀,输出压力 油推动工作台右移,同时使 工作台位移增加,当增加量 为△U=Xf+△Xf-Xg- △Xg =0,工作台重新停止.
电液伺服阀
工作台
xf
放大器
uf Δu
反馈电位器 xo +E Nhomakorabeaug
指令电位器
xg
双电位器位置控制电液伺服系统
.
13
4、液压伺服控制系统举例
该系统是一个电量反馈的闭环控制系统。该系统的工作原 理方块图为:
指令 电位器
+ -
伺服 放大器
电液 伺服阀
液压缸
工作台
反馈 电位器
位置控制系统工作原理方块图
.
14
4、液压伺服控制系统举例
(1) 液 压 仿 形 刀 架
v纵
v合
v仿
v合
v仿
v纵
v纵
b
a
进给运动示意图
.
该 系 统 的 反 馈 是 机 械 反 馈
11
4、液压伺服控制系统举例
(2)电液位置伺服控制系统
该系统控制工作台的位置,使 之按照指令电位器给定的规律 变化.指令电位器将滑臂的位置 指令Xg转换成电压Ug. 工作台位 置Xf由反馈电位器检测,转换成 电压Uf.两个电位器接成桥式回 路,电桥的输出电压△U=Ug-Uf =K(Xg-Xf),K电位器增益. 当工作台位置Xf与指令位置Xg 一致时,Xf=Xg,即△U=0.
《电液伺服系统》课件

介绍电液伺服系统的定义、组成、工作原理,控制元件的种类,动作元件的 特点,系统调试与维护,以及应用场景、优势、发展前景。
概述
电液伺服系统是控制和调节液压机械运动的先进系统,由动力元件、控制元件和动作元件组成,能够实现高效、 精确的运动控制。
动力元件
液压泵
将输入的机械能转换为液压能,提供压力和流 量。
液压马达
将液压能转化为旋转运动,驱动液压机械的转 动部分。
系统调试与维护
1
Байду номын сангаас
系统调试
调试前的准备工作,调试流程和步骤,确保系统正常运行。
2
系统维护
维护前的准备工作,维护周期和方法,延长系统的使用寿命。
应用场景
• 工业生产自动化 • 船舶与海洋工程 • 机床与自动化装备 • 飞行器和航天器
结语
电液伺服系统具有精确控制、高效能转换等优势,未来的发展前景广阔。
液压马达
将液压能转换为机械能,驱动液压机械的运动。
控制元件
比例控制阀
通过调节液压系统中的流量 比例,实现运动速度和位置 的精确控制。
压力控制阀
根据系统需求,控制液压系 统中的压力水平,确保系统 的安全运行。
流量控制阀
调节液压流量大小,实现对 液压元件的精确控制。
动作元件
液压缸
将液压能转化为机械线性运动,用于推动、拉 动或举升物体。
液压伺服系统控制PPT课件

二、按被控物理量的名称分类 位置伺服控制系统、速度伺服控制系统、其它物理
量的控制系统。 三、按液压动力元件的控制方式或液压控制元件的形 式分类
节流式控制(阀控式)系统:阀控液压缸系统与阀控 液压马达系统
容积式控制系统:伺服变量泵系统与伺服变量马达 系统。 四、按信号传递介质的形式分类
机械液压伺服系统、电气液压伺服系统与气动液压 伺服系统等。
太空梭
3D动态模拟器
动感电影院
动态飞行模拟器
手臂式升降平台
点焊机器人
雷射机械手追踪系统
大白天,还吃饱了就睡…
传统点到点闭回路液压控制系统
闭回路液压伺服机构
图是泵控式电液速度控制系统的原理图。该
系统的液压动力元件由变量泵和液压马达组 成,变量泵既是液压能源又是液压控制元件。
泵控式电液速度控制系统的工作原理方块图
反馈之形式
ቤተ መጻሕፍቲ ባይዱ
输入讯号与输出讯号关系
液压伺服位置控制系统
液压伺服速度控制系统
液压伺服速度控制系统
第一章 绪论 Introduction of Hydraulic
Servo Control
1-1 液压伺服控制定义
伺服控制
控制物体的位置、方向、姿态,并能追踪任意 变化之目标的控制系統。(JIS)
液压伺服控制
液压伺服控制系统是以液压动力元件作驱动装 置所组成的反馈控制系统。在这种系统中,输出量 (位移、速度、力等)能够自动地、快速而准确地复现 输入量的变化规律。同时。还对输入信号进行功率
微机液压伺服控制系统
液压伺服系统组成
• 输入元件 • 反馈测量元件 • 比较元件 • 放大转换元件 • 执行元件 • 控制对象
伺服控制应用实例
液压伺服与比例控制系统课件-电液伺服系统的校正
6.3 电液伺服系统的校正 二 、速度和加速度校正
速度反馈校正的主要作用是提高主回路的静态刚度,减少速 度反馈回路内的干扰和非线性的影响,提高系统的静态精度。加 速度反馈校正主要是提高系统的阻尼。
根据需要速度反馈与加速度反馈可以单独使用,也可以联合 使用。
(二)动压反馈校正
图6-19 带动压反馈的系统方框图
采用动压反馈校正可以提高系统的阻尼,而又不降低系统的静刚度。 采用压力反馈或动压反馈提高系统的阻尼比,同样受局部反馈回路 稳定性的限制。当Kfp过高时,由于伺服阀等小参数的影响局部反馈回路 就会变得不稳定。
6.3 电液伺服系统的校正
(一)压力反馈校正
图6-18 带压力反馈的系统方框图
校正后的阻尼比: 位置系统的开环传递函数:
6.3 电液伺服系统的校正
由上式可以看出,压力反馈不改变开环增益和液压固有频率,但使阻 尼比增加了。
压力反馈校正是通过增加系统的总流量- 压力系数来提高阻尼的。 显然,压力反馈降低了系统的静刚度。
(二)滞后校正举例
加入滞后校正后
6.3 电液伺服系统的校正
此时,系统的开环传递函数为
其中,校正后的速度放大系数
6.3 电液伺服系统的校正
图6-16 具有滞后校正的位置伺服系统伯德图
6.3 电液伺服系统的校正
设计滞后校正网络的设计步骤:
1 根据稳态误差要求,确定系统速度放大系数 2 画出未校正系统的伯德图,检查相位裕量和增益裕量,是否满足
6.3 电液伺服系统的校正
以上讨论了比例控制的电液位置伺服系统,其性能主要由动力 元件参数所决定。对这种系统,单纯靠调整增益往往满足不了系统 的全部性能指标,这时就要对系统进行校正,高性能的电液伺服系 统一般都要加校正装置。
液压控制系统(常同立编著,清华大学出版社)PPT课件

12
应用案例 5——机器动物
高功率体积比和结构紧凑
13
应用案例 5——机器动物
14
应用案例 5——机器动物
15
应用案例 6——两足机器人
高功率体积比和结构紧凑
16
应用案例 6 —— 两足机器人
17
小结
液压控制技术是一门机电液一体化新技术,它是自动控制技术的 一个重要分支。液压控制技术包括开环控制和闭环控制两类,其中液 压闭环控制较为复杂。
29
第2章 参考文献
[1] Katsuhiko Ogata. System dynamics. 北京:机械工业出版社. 2004.3 [2] 吴重光. 仿真技术. 北京:化学工业出版社. 2000.5. [3] Katsuhiko Ogata. Modern control engineering. Prentice Hall, 2010 [4] John J. D’Azzo and Constantine H. Houpis, Stuart N. Sheldon. Linear Control System Analysis and Design with Matlab. New York: Marceld Dekker, Inc. 2003 [5] 王广雄,何朕. 控制系统设计. 北京:清华大学出版社, 2008.3. [6] 高钟毓等. 机电控制工程. 北京:清华大学出版社, 2011.8. [7] www. [8] Roland S. Burns. Advanced Control Enginineering. Oxord: Butterworth-Heinemann. 2001. [9] J.R. Leigh. Control theory. London: The institution of engineering and technology. 2004. [10] Isaac Horowitz. Some ideas for QFT research. International Journal of Robust and Nonlinear Control, 2003, 13: 599-605. [11] 刘兵,冯纯伯. 基于双重准则的二自由度预测控制——连续情况. 自动化学报. 1998,24(6):721-726. [12] 冯勇等. 现代计算机控制系统. 哈尔滨:哈尔滨工业大学出版社, 1998.7. [13] D. M. Auslander, J. R. Ridgely, J. D. Ringgenberg. Control software for mechanical systems: object-oriented design in a real-time world. Pearson Education, Inc. 2002.
《液压伺服系统控制》课件

液压装置
液压装置提供了所需的压力和 流量,确保系统正常运行。
传感器
传感器用于感知系统的状态, 以反馈给控制器,帮助实现精 确控制。
执行器
执行器根据控制信号进行动作, 驱动机械设备实现所需的运动。
液压伺服系统的控制方式
1 基于位置的控制
通过控制液压油的流量和压力来实现位置的精确控制。
2 基于速度的控制
通过控制液压油的流量来实现运动的平滑变化与调节。
3 基于力的控制
通过控制液压油的压力来实现对力的精确控制,适用于需要对外力进行响应的场景。
液压伺服系统的电控系统
电控系统是液压伺服系统中常用的控制方式之一,通过电信号控制液压系统的运行。
电控系统的概述
电控系统通过电信号控制 液压系统的各个部件,实 现对液压系统的控制和调 节。
《液压伺服系统控制》 PPT课件
液压伺服系统控制是一门关于液压伺服系统控制的课程,本课程将液压伺服 系统的基本概念与控制方法进行介绍,以及实际应用案例的分享。
液压伺服系统的概念与组成
液压伺服系统是一种通过控制液压力来实现精确控制的系统。它由液压装置、传感器、执行器等组成, 每个组件的作用都不可或缺。
常见的电控系统
常见的电控系统包括脉宽 调制(PWM)控制系统和 比例控制系统。
电控系统的引导
根据具体应用需求选择合 适的电控系统,并进行必 要的引导和操作。
液压伺服系统的传感器
传感器在液压伺服系统中起着重要作用,用于感知和测量系统的各种参数和状态。
压力传感器
压力传感器用于测量和监测液 压系统中的压力变化,提供反 馈信号给控制器。
2
液压马达
液压马达是将液压油的动能转化为机械能,产生旋转运动的执行器。
液压伺服与比例控制系统课件

液压比例控制系统的优缺点
缺点
容易出现泄漏和污染:液压系统存在一定的泄漏和污染问题,需要采取措施进行防护。
对温度和压力变化敏感:液压系统的性能受到温度和压力变化的影响较大,需要进行补偿和 调整。
04
液压伺服与比例控制系统的设计 与应用
缺点
维护成本高、液压油易污染、温 度变化影响大、管道复杂、对油 液清洁度要求高等。
03
液压比例控制系统的工作原理
液压比例控制系统的组成
控制器
用于接收输入信号,并生 成控制指令。
执行器
根据控制器的指令,驱动 液压比例阀,以实现对流 量的控制。
反馈传感器
监测执行器的位置或速度 ,将其转化为电信号反馈 给控制器,以形成闭环控 制。
促进工业技术创新
液压伺服与比例控制系统的发展推动了工业技术的创新, 为工业生产带来了更多的可能性,为工业发展注入了新的 动力。
改变工业生产模式
液压伺服与比例控制系统的应用改变了传统的工业生产模 式,实现了更加智能化、网络化的工业生产,为工业发展 带来了新的机遇和挑战。
THANKS
感谢观看
液压伺服与比例控制系统的安全操作规程
在操作前阅读使用手册,按照手册要 求进行操作。
检查液压系统的各个部件是否正常, 无泄漏和损伤。
在操作过程中,不要在危险的情况下 进行操作,如设备故障、人员伤害等 。
在操作过程中,要注意安全保护措施 ,如佩戴安全帽、安全手套等。
06
液压伺服与比例控制系统的发展 趋势及未来展望
液压比例控制系统的分类
按控制方式
开环控制、闭环控制。
按液压执行元件
液压伺服控制系统课件
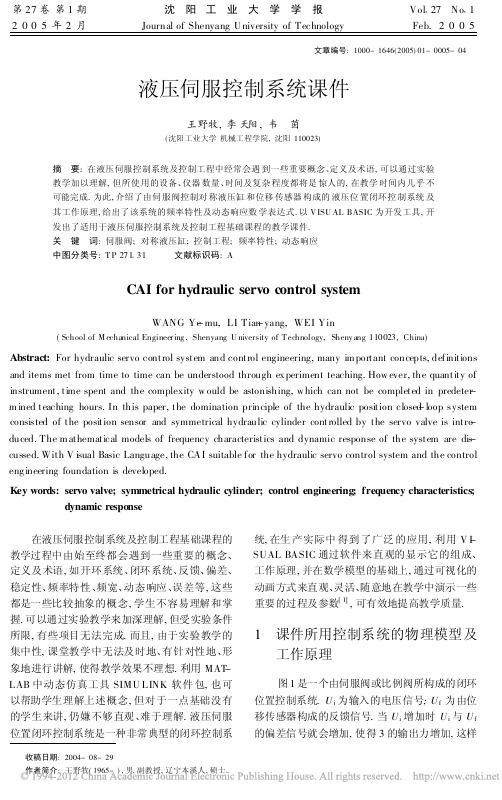
收稿日期:2004-08-29作者简介:王野牧(1965-),男,副教授,辽宁本溪人,硕士.文章编号:1000-1646(2005)01-0005-04液压伺服控制系统课件王野牧,李天阳,韦 茵(沈阳工业大学机械工程学院,沈阳110023)摘 要:在液压伺服控制系统及控制工程中经常会遇到一些重要概念、定义及术语,可以通过实验教学加以理解,但所使用的设备、仪器数量、时间及复杂程度都将是惊人的,在教学时间内几乎不可能完成.为此,介绍了由伺服阀控制对称液压缸和位移传感器构成的液压位置闭环控制系统及其工作原理,给出了该系统的频率特性及动态响应数学表达式.以V ISU AL BASIC为开发工具,开发出了适用于液压伺服控制系统及控制工程基础课程的教学课件.关 键 词:伺服阀;对称液压缸;控制工程;频率特性;动态响应中图分类号:T P271 31 文献标识码:ACAI for hydraulic servo control systemWANG Ye-mu,LI Tian-yang,WEI Yin(School of M echanical Engineer ing,Shenyang U niversity of T echnology,Sheny ang110023,China)Abstract:For hydraulic servo control system and control engineering,many im portant concepts,definitions and items met from time to time can be understood through ex periment teaching.How ever,the quantity of instrument,time spent and the complexity w ould be astonishing,w hich can not be completed in predeter-m ined teaching hours.In this paper,the domination principle of the hydraulic position closed-loop system consisted of the position sensor and symmetrical hydraulic cylinder controlled by the servo valve is intro-duced.The m athematical models of frequency characteristics and dynamic response of the system are dis-cussed.With V isual Basic Language,the CAI suitable for the hydraulic servo control system and the control eng ineering foundation is developed.Key words:servo valve;symmetrical hydraulic cylinder;control engineering;frequency characteristics;dynamic response在液压伺服控制系统及控制工程基础课程的教学过程中由始至终都会遇到一些重要的概念、定义及术语,如开环系统、闭环系统、反馈、偏差、稳定性、频率特性、频宽、动态响应、误差等,这些都是一些比较抽象的概念,学生不容易理解和掌握.可以通过实验教学来加深理解,但受实验条件所限,有些项目无法完成.而且,由于实验教学的集中性,课堂教学中无法及时地、有针对性地、形象地进行讲解,使得教学效果不理想.利用MAT-LAB中动态仿真工具SIMU LINK软件包,也可以帮助学生理解上述概念,但对于一点基础没有的学生来讲,仍嫌不够直观、难于理解.液压伺服位置闭环控制系统是一种非常典型的闭环控制系统,在生产实际中得到了广泛的应用,利用V I-SUAL BASIC通过软件来直观的显示它的组成、工作原理,并在数学模型的基础上,通过可视化的动画方式来直观、灵活、随意地在教学中演示一些重要的过程及参数[1],可有效地提高教学质量.1 课件所用控制系统的物理模型及工作原理图1是一个由伺服阀或比例阀所构成的闭环位置控制系统.U i为输入的电压信号;U f为由位移传感器构成的反馈信号.当U i增加时U i与U f 的偏差信号就会增加,使得3的输出力增加,这样第27卷第1期2005年2月沈 阳 工 业 大 学 学 报Journal of Shenyang University of TechnologyVol 27No 1Feb.2005就会推动4向左侧移动,高压油P s 就会经过阀输出到油缸的左腔,推动油缸向右侧运动,油缸向右侧的运动使得位移传感器1的输出电压U f 增加,U i 与U f 的偏差值就会随之减小直到零为止(无负载时),这样油缸就会在右侧新的位置上停止.如果U i 减小,响应过程与上述过程相反.当输入信号为等幅变频的周期性正弦时,油缸位移的稳态输出值随角频率的变化情况即为频率特性.当输入信号为单位阶跃信号时,油缸位移的瞬态输出随时间的变化情况即为动态响应特性.可通过可视化的油缸运动表现来描述上述两种特性.图1 液压系统模型图F ig.1 M odel of the hydraulic control system 1位移传感器 2双作用对称液压缸的活塞杆 3力马达或比例电磁铁 4伺服阀或比例阀 5电液伺服阀或电液比例阀控制器2 课件所用控制系统的数学模型将图1所示控制系统线性化,可得控制系统传递函数框图,如图2.图2 控制系统传递函数框图Fig.2 T ransfer function of the hydraulic contro l system其中:K a 伺服阀放大器放大倍数;K sv 伺服阀的电流-位移增益;K q 伺服阀流量增益;A p 油缸有效作用面积;W n 无阻尼固有频率;S n 阻尼比;K f 位移传感器放大倍数.根据上边的闭环传递函数框图可得闭环传递函数为[2]G (S )=K vS 3W 2n+2S n W n S 2+S +K v K f(1)其中:K v =K a K sv K qA p这样就可根据频率特性的定义求出闭环幅频特性和闭环相频特性.对应不同的角频率求出不同的幅值衰减量和相位滞后值.将这些数据保存到数组中,作为可视化显示频率特性的数据.将式(1)化成状态方程,利用四阶龙格-库塔法解微分方程组,可得出系统在单位阶跃信号输入下的动态响应数据,将这些数据保存到数组中,作为可视化显示动态响应特性的数据[3].3 课件主要功能简介1)演示说明开环、闭环系统图3为控制系统具有闭环检测回路时(闭环生效时)的一个稳态工作点[4].图3所示的状态为输入电压3V 时的油缸位置,当输入电压不同时可以很明确地看出油缸的位置不同.通过这个界面可以很好地理解位置控制系统的实质及其在生产实际中的具体表现.另外,通过观察阀口开度的变化情况,可以说明偏差控制系统的实质,以及控制系统的主反馈为什么一定是负反馈.图3 闭环状态演示界面Fig.3 Demonstration interface of the closed -loop hy -draulic system图4为反馈回路失效时的控制系统表现状态.当反馈不存在时,油缸只能停留在其两端,系统将不再是位置控制系统,将变成一个无反馈的开环控制系统,无法控制油缸的位置.这种现象也6 沈 阳 工 业 大 学 学 报第27卷正是生产实际中检测回路失效时的一种表现[5].图4 反馈回路失效时状态演示界面Fig.4 Demonstration interface of the hydraulic systemfor the failure mode of feedback loop2)演示说明频率特性图5为频率特性演示界面.讲明频率特性的实质和含义一直是教学过程中的一个难点,通过这个界面可以充分地演示说明频率特性的实质.当输入信号为等幅变频的周期性正弦时,油缸位移的稳态输出值可以通过动画及曲线同时显示在该界面中.选择输入不同的角频率值可以明显地看出油缸输出位移变化的幅值衰减情况及相位滞后情况[6],将输入电压信号与输出的位移信号同时在右侧的PICTURE 框中显示将更有利于观察这一点.另外,软件具有选择显示速度及步长的功能[7],可以通过 慢镜头 进一步进行演示及讲解.界面中右下脚PICTURE 框中显示的是真实坐标下的频率特性曲线[8],而没有采用控制工程中常用的对数坐标,这样将更加有利于理解两种坐标的区别,容易说明对数坐标的实质、含义及优点.图5 频率特性演示界面Fig.5 Demonstration interface of frequency char acteristics3)演示说明动态响应特性图6为动态响应特性演示界面.当输入信号为单位阶跃信号时,油缸位移的瞬态输出通过动画及曲线同时显示在该界面中.当改变控制系统的开环放大倍数时,控制系统的输出将会有所不同,可以明显、直观地看出输出量振荡次数的增多及调整时间的加长,开环放大倍数增加到一定程度,控制系统将不稳定[8].另外,将闭环系统中其它几个重要参数的变化情况(如阀口开度、油缸前腔压力、油缸后腔压力、反馈电压等),也都同时显示在界面中,有利于理解闭环系统中信号的转换、传递、放大等过程.该界面同样具有选择显示速度及步长的功能,以利于演示及观察.该课件中所涉及到的不同的曲线均采用不同的颜色绘制,油缸前、后腔的颜色也随着压力的不同而动态变化,以便更生动的感受信号及参数的变化情况.图6 动态响应特性演示界面F ig.6 Demonstration inter face o f dynamic respo nse4 结 论该课件可以很直观、方便地演示几乎所有在控制工程中所涉及到的重要过程,进而通过它更容易、方便地理解和掌握控制理论中的重要思想.它的演示过程与做实验比较具有明显的优势,它更加灵活、方便、重复使用性强,如果将课件中的功能完全由真实实验来完成,所使用的设备、仪器数量、时间、消耗、复杂程度将都是非常惊人的,在教学时间内几乎不可能完成.控制理论中所涉及到的重要概念和思想几乎分布在课程的各处,可以随时利用该课件进行演示和讲解,这必将给教学质量的提高带来很大的益处.7第1期王野牧等:液压伺服控制系统课件参考文献:[1]吴昌平.Visual Basic6.0程序设计[M].北京:人民邮电出版社,2002.(Wu C P.V isual Basic6.0progr amming[M].Beijing: Posts&T elecom Press,2002.)[2]王春行.液压控制系统[M].北京:机械工业出版社,2004.(Wang C X.Hydraulic control system[M].Beijing: China M achine Press,2004.)[3]何光渝.V ISUA L BASIC常用数值算法[M].北京:科学出版社,2002.(He G Y.G eneral numerical v alue algor ithm on V isual Basic languag e[M].Beijing:Science Press,2002.) [4]成大先.机械设计手册 液压控制[M].北京:化学工业出版社,2004.(Cheng D X.T he handbook of machine design-hydraulic contro l[M].Beijing:Chemical Industry Pr ess,2004.)[5]江小霞,卢长耿,钟荣龙.液压控制系统的动态测试系统[J].液压与气动,2002(11):29-31.(Jiang X X,Lu C G,Zhong R L.Dynamic test system of hydraulic control system[J].Chinese Hy draulics& P neumatics,2002(11):29-31.)[6]Guo H B,L i H R.Study on the characterist ics of thesing le rod hydr aulic cylinder controlled by asymmetric valv e[A].Pr oc.of ISFP[C].W uhan,China,IA PW-PC,2003:477-482.[7]黄晓东,聂继方.电液伺服阀特性计算机辅助测试系统[J].机床与液压,2003,5:187-189.(Huang X D,N ie J F.T he CAT system for t he feature of electro hy draulic servo valve[J].M achine T ool and Hydraulic,2003(5):187-189.)[8]王栋梁,李洪人.阀控液压缸伺服系统的键图分析[J].济南大学学报,2002(12):355-358.(Wang D L,L I H R.Bond g raph analysis on the valve contr olling servo system[J].Jour nal of Jinan U nivers-i ty,2002(12):355-358.)(责任编辑:邓美艳 英文审校:王世杰)待发表文章摘要预报移动机器人数学模型的近似线性化及状态反馈镇定研究姜 勇1,孙茂相1,董再励2(1 沈阳工业大学信息科学与工程学院,沈阳110023;2 中国科学院沈阳自动化研究所机器人学重点实验室,沈阳110016)摘 要:针对机器人控制领域中一类多输入多输出(MIM O)仿射非线性系统,提出了一种基于平衡流形的近似线性化状态反馈镇定算法,并用此算法解决了一类完整约束轮式移动机器人(WMR)的镇定问题.仿真分析表明,此方法不仅能够实现系统的镇定,而且降低了因平衡工作点变动给系统稳定性带来的影响,同时也大大地简化了对非线性系统的综合设计过程,具有良好的控制效果和实用性.8 沈 阳 工 业 大 学 学 报第27卷。
液压伺服与比例控制系统课件-电液力控制系统

6.5 电液力控制系统
图6-35 力控制系统方块图 图6-36 电液位置伺服系统方块图
当满足
6.5 电液力控制系统
则传递函数可近似写成: 简化方块图:
图6-37 简化方块图
6.5 电液力控制系统
简化传递函数: 负载固有频率:
刚度与负载质量形成的固有频率:
加滞后校正 、速度与加速度校正 、压力反馈和动压反馈校正的主要 目的是什么?
思考题
8. 电液速度控制系统为什么一定要加校正 ,加滞后校正和加积分校正 有什么不同?
9. 在力控制系统中负载刚度对系统特性有何影响?影响了哪些参数? 10.力控制系统和位置控制系统对伺服阀的要求有什么不同?为什么?
6.5 电液力控制系统
以力为被调量的液压伺服控制系统称为液压力控制系统。 在工程实际中 , 力控制系统应用的很多 , 如材料试验机 、结构 疲劳试验机 、轧机张力控制系统 、车轮刹车装置等都采用电液力控
制系统。
一 、 系统组成及工作原理
系统主要由伺服放大器 、 电液伺服阀 、液压缸和力传感器等组成。 当指今装置发出的指令电压信号作用于系统时 , 液压缸便有输出力。 该力由力传感器检测转换为反馈电压信号与指令电压信号相比较 , 得 出偏差电压信号 。然后经伺服放大器放大后输入到伺服阀产生负载压 差作用于液压缸活塞上 , 使输出力向减小误差的方向变化 , 直至输出 力等于指令信号所规定的值为止。
6.5 电液力控制系统
图6-34 电液力控制控制系统原理图
6.5 电液力控制系统 二、 基本方程与开环传递函数
力传感器传递函数: 放大器传递函数: 伺服阀传递函数: 阀控液压缸的三大基本方程:
F g=APPL=(MS2+BS+K)XP
挖掘机的液压系统及控制完整版PPT
充满氮气
液压回路的串联
• 串联:多路换向阀 中上一个阀的回油 为下一个阀的进油 。液压泵的工作压 力是同时工作的执 行元件的总和,这 种油路可以做复合 动作,但是克服外 载荷的能力比较差 。
液压回路的并联
• 并联:多路换向阀中 各换向阀的进油口都 与泵的出油路相连, 各回油口都与油箱相 连。这种油路克服外 载荷的能力比较强, 但是几个执行元件同 时工作时负载小的先 动,负载大的后动, 复合动作不协调。
• 流量Q(单位L/min,升/分钟) 单位时间内输出液压油的体积。 Q=q×n(不考虑单位转换系数,下同) 其中n是泵的转速,单位rpm,转/分钟
• 泵的功率N(单位Kw,千瓦) N=P×Q
液压马达的基本性能参数
• 排量q(单位ml/r,毫升/转) 液压马达每转一周所排出液体的体积。排量不可变 的叫定量马达,排量可变的叫变量马达。
目的:动臂油缸大腔进油。 结果:在重力作用下,换向瞬间 大腔的油流回油箱,造成油缸 先缩回后伸出。
“点头”现象的解决方案
1.采用三位六通
换向阀;
2.在进油道设置
单向阀。
5
注:
1.管路5和12都是
进油道;
2.管路是回油。
12 10
二通插装阀
方 向 控 制 回 路
液压蓄能器
液压油 膜片
原理:气体被压 缩后储存能量。
顺序阀
泵的压力切断控制
Q
无压力切断控制
Q大 Q小
P 压力切断控制
• 泵输出压力在设定值以 上时,使泵的流量自动 减小,进行压力切断控 制(恒压控制),主要 目的是进一步减小高压 溢流损失。
泵的负流量控制
液压伺服系统电液伺服系统课件

随着科技的不断发展,液压伺服系统也在不断创新和完善。未来,液压伺服系统将朝着智能化、数字 化、网络化方向发展,实现更高效、更精准的控制。同时,液压伺服系统还将更加注重环保和节能, 推动绿色制造和可持续发展。
02 电液伺服系统基础知识
电液转换元件
01
02
03
伺服阀
将电气信号转换为液压流 量或压力,实现液压执行 机构的精确控制。
速度同步
采用液压伺服系统实现多工位、多执行机构的速 度同步,优化生产流程。
航空航天领域中的应用
飞机起落架收放系统
通过电液伺服系统实现飞机起落架的平稳收放,确保飞行安全。
发动机推力控制
利用液压伺服系统对航空发动机进行精确的推力控制,提高飞行 性能。
飞行姿态调整
采用电液伺服系统实现飞行姿态的快速、精确调整,满足复杂飞 行需求。
仿真分析
在系统模型的基础上,进行仿真分析,包括系统动态响应、控制精度、稳定性等方面的评估,以验证设计的合理性。
优化设计
根据仿真分析结果,对系统进行优化设计,包括调整元件参数、改进控制策略等,以提高系统性能。
04 电液伺服系统实现技术
硬件平台搭建
控制器选择
根据系统需求,选用合适的控制器,如PLC、DSP等,确保控制精 度和实时性。
元件选型与计算
元件选型
根据规格书要求,选择合适的液压泵 、马达、阀等元件,确保系统性能达 标。
元件计算
对所选元件进行详细的计算和分析, 包括流量、压力、功率等参数,确保 元件之间的匹配性和系统的稳定性。
系统仿真与优化
系统建模
利用AMESim、MATLAB/Simulink等仿真软件,建立液压伺服系统的数学模型,为后续仿真分析提供基础。
伺服控制及其应用ppt课件
LOS系统
系统组成
有效载荷
可见光、红外、激光
框架平台
2框架、4框架、5框架
伺服系统
电机伺服
图像系统
目标识别、目标跟踪
LOS系统
视轴控制目的
视轴稳定
相对于惯性系 隔离运动 抵抗扰动 多框架
视轴跟踪
目标跟踪 捕获与跟踪 火控铰链
LOS系统
视轴控制原理
视轴稳定
速度稳定回路 单位反馈控制 精度40urad
交流电机
异步电机 同步电机 步进电机 无刷电机
特殊电机
直线电机、旋转变压器
系统组成
直流电机
力矩电机
力矩控制 低速平稳 应用-雷达天线
伺服电机
齿轮减速 输出力矩大 应用-舵机
系统组成
PWM电机控制
双极性控制
50%占空比 低速平稳 分辨率低
单极性控制
换向信号 分辨率高
空间矢量PWM
反馈控制
反馈通道
前馈控制
前馈补偿、改善动态性
内模控制
模型抵消、提高鲁棒性
系统组成
控制系统组成
被控对象
执行机构、负载
传感器
反馈信号
控制器
模拟控制器、数字控制器
系统组成
被控对象
电机
电能机械能
电磁阀
液压系统
其他
电磁线圈、加热、压电陶瓷
军工
?
系统组成
电机分类
直流电机
力矩电机-直接驱动 伺服电机-齿轮减速
LOS系统
旋转变压器
极对数
单级、多级
工作原理
V=A*SIN(Wt) 励磁电源:1KHz、28V
角位置解调
滤波法、鉴相法 旋变解调模块
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.4 液压伺服与比例控制系统的发展与应用
液压伺服控制是一 门新兴的科学技术。它不但 是液压技术的一个重要分支.而且也是控制领域中的 一个重要组成部分。
在第一次与第二次世界大战期间及以后,由于军 事工业的刺激,液压伺服控制因响应快、精度高、功 率—重量比大等特点而受到特别的重视,特别是近几 十年,随着整个工业技术的发展,促使液压伺服与比 例控制得到迅速发展,使这门技术元论在元件与系统 分面,还是在评论与应用方面都日趋完善与成熟,形 成一门新兴的科学技术。
1.3 液压伺服与比例控制系统的优缺点
(一)、液压伺服控制的优点 (1)液压元件的功率—重量比与力矩-惯量比大 可以 组成结构紧凑、体积小、重量轻、加速性好的伺服系统。 (2)液压动力元件快速性好,系统响应快。 (3)液压伺服系统抗负载的刚度大,即输出位移受负载 变化的影响小,定位准确,控制精度高。 (二)、液压伺服控制的缺点 (1) 液压元件,特别是精密的液压控制元件(如电液伺 服阀)抗污染能力差,对工作油液的清洁度要求高。 (2) 油温变化时对系统的性能有很大的影响。 (3) 当液压元件的密封设计、制造相使用维护不当 时.容易引起外漏,造成环境污染。 (4) 液压元件制造精度要求高,成本高。 (5) 液压能源的获得与远距离传输都不如电气系统方 便。
微机液压伺服控制系统
液压伺服系统组成
• 输入元件 • 反馈测量元件 • 比较元件 • 放大转换元件 • 执行元件 • 控制对象
伺服控制应用实例
图1.15 液压伺服控制之车床靠模加工系统
图1.16 CNC数值控制机台X、Y轴轴向运动控制系统
1.17 射出成型机射出压力控制系统
图1.18 轧钢厚度控制
液压伺服控制 Hydraulic Servo Control
第一章 绪论 Introduction of Hydraulic
Servo Control
1-1 液压伺服控制定义
伺服控制
控制物体的位置、方向、姿态,并能追踪任意 变化之目标的控制系統。(JIS)
液压伺服控制
液压伺服控制系统是以液压动力元件作驱动装 置所组成的反馈控制系统。在这种系统中,输出量 (位移、速度、力等)能够自动地、快速而准确地复 现输入量的变化规律。同时。还对输入信号进行功
图1.1 液压伺服控制系统方块图
液压伺服控制具有下列之特性
.可多方用于不同控制系统。 .以小能量的输入指令经放大后而得到
大的输出。 .是一种具有反馈(Feed Back)控制。 .可控制受控系统的动作、速度或出力。 .对目标值可作广范的变化。
开回路与闭回路控制
图1.4(a) 传统之开回路液压控制系统
二、按被控物理量的名称分类 位置伺服控制系统、速度伺服控制系统、其它物
理量的控制系统。 三、按液压动力元件的控制方式或液压控制元件的形 式分类
节流式控制(阀控式)系统:阀控液压缸系统与阀 控液压马达系统
容积式控制系统:伺服变量泵系统与伺服变量马 达系统。 四、按信号传递介质的形式分类
机械液压伺服系统、电气液压伺服系统与气动 液压伺服系统等。
图1.19 动力辅助转向系統
1.2 液压伺服与比例控制的分类
一、按系统输入信号的变化规律分类 • 定值控制系统:当系统输入信号为定值时称为定值控
制系统。 • 程序控制系统:系统的输入信号按预先给定的规律变
化时,称为程序控制系统 • 伺服系统:也称随动系统,其输入信号是时间的未知
函数,而输出量能够准确、快速地复现输入量的变化 规律。
率放大,因此也是一个功率放大装置。 。
滑阀是转换放大元件,它将输入的机械信号(阀芯位 移)转换成液压信号(流量、压力)输出,并加以功率放 大。液压缸是执行元件,输入是压力油的流量,输出 是运动速度(或位移)。滑阀阀体与液压缸体刚性连结 在一起,构成反馈回路。因此,这是个闭环控制系统 。
液压伺服控制系统方块图
目前,液压伺服系统特别是电液伺服系统已成为 武器自动化与工业自动化的一个重要方面。在国防工 业与一般工业领域都得到了广泛应ake System) 防锁死煞车系统
主动式悬吊系统
船舶操控系统1
船舶操控系统2
飞行操控系统
液压伺服系统应用实例
防爆机器人
飞弹射控系统
传统点到点闭回路液压控制系统
闭回路液压伺服机构
图是泵控式电液速度控制系统的原理图。该
系统的液压动力元件由变量泵和液压马达组 成,变量泵既是液压能源又是液压控制元件。
泵控式电液速度控制系统的工作原理方块图
反馈之形式
输入讯号与输出讯号关系
液压伺服位置控制系统
液压伺服速度控制系统
液压伺服速度控制系统
太空梭
3D动态模拟器
动感电影院
动态飞行模拟器
手臂式升降平台
点焊机器人
雷射机械手追踪系统
大白天,还吃饱了就睡…