高等流体力学第3讲
流体力学-第三讲,流体力学基本方程组

--------式(5) 为积分形式的动量方程
dui d
pn
dt
n
fid n j jids
(6)
s
ji为应力张量,是对称张量
ji — —i为作用面方向,j 为面力方向
2021/7/22
13
d ui dt
d
f i d
s
n j
jids
(6)
pn n
为应力张量
ji — —i为作用面方向,j 为面力方向
s
pn
则:作用在τ和s上的总质量力和面积力为:
F
fd
(1)
pnds
(2)
s
体积τ内流体的动量为:
ud
(3)
2021/7/22
12
于是动量定理可以写成:
d dt
ud
f d
s
pnds
(4)
把雷诺第二输运方程
d dt
F d
dFd
dt
应用于式(4)
du d
dt
f d
s
pnds
(5)
也可表达为
第三章 流体力学基本方程组
➢ 雷诺输运方程 ➢ 连续性方程 ➢ 运动方程(动量方程) ➢ 能量方程
2021/7/22
1
第一节 雷诺输运方程
一、 随体导数
dF dt
F t
ui
F xi
F t
u
F
以欧拉空间坐标所表示的流体质 点的运动属性对时间的全导数.
二、 雅可比行列式的时间导数 :
dJ ui J uJ
ui
0
(3b)
7
d ivu
u
u
高等流体力学讲义课件_第 三 章 特殊方程
D u u 1 p (h G) Dt 2 t
从能量方程出发推导的伯努利方程
设定常流,
D u u (h G) 0 Dt 2
上式表示一个流体质点在它的运动轨迹的所有点上总能量保持不变,
u u h G C 2
u u e G C 2 p
均能流动
在理想流体、绝热定常流动条件下,忽略质量力作用时,由伯努利方程知 滞止焓沿流线不变, u u h G C (沿流线) 2 h0 const. 在无穷远均匀来流条件下,及其他一些条件下,滞止焓沿每一条流线相 同,滞止焓在流场中处处为常数,是为均能流动。克罗柯方程简化为
u T s
C (t )
A(t )
式中A(t)是涡管截面,根据开尔文定理,
D D u dr Dt C (t ) Dt
A( t )
ndA 0
涡管在随流体运动过程中通过其任一横截面的涡通量, 即涡管强度, 不随时 间改变. 在运动过程中, 涡管会发生变形:当涡管被拉伸时, 涡量增大, 涡管 被压缩时, 涡量减小, 以保持通过横截面的总的涡通量不变。
设在封闭的物质线C(t) 上张一曲面A(t),则由STOKES 定理,
A(t )
ndA
D Dt
A( t )
ndA 0
对于正压 , 体积力单值有势的理想流体流动 , 沿任意封闭的物质周线上的速度 环量和通过任一物质面的涡通量在运动过程中守恒.
讨论1
§3.1 开尓文定理
第 三 章 特殊方程
3.1 开尓文定理
欧拉方程
u 理想流体, (u )u p f t f G 设质量力有势且为单值函数, u p (u )u G 代入欧拉方程得 t
【计算流体力学】第3讲-差分方法1

a2u j
a3u j1+a4u j+2
扰动波传播方向
… j-2 j-1 j j+1 …
更多地使用上游信息
一般双曲守恒律方程
u f (u) 0 t x
f (u) f (u) f (u)
u f + f 0 t x x
df (u) 0 du
df (u) 0 du
例:
f 1 f u
u x j
时间积分,计算 出下一时刻的值
u lim u(x x) u(x) u j1 u j
x j x0
x
x
沿各自方向一维离散
➢多维方程的差分法: 维数分裂
u f1(u) f2 (u) 0 t x y
u
1. 构建差分格式
x j
已知均匀网格点上物理量的分布为uj ,
f1
x
f1
x
f2
y
f2
y
RAE2822翼型周 围的网格
问题: 原先需要计算2次导数,变换后需要计算4次,计算量增加 ✓利用坐标变换的性质,可以合并
14
坐标变换Jocabian系数的计算
已知 x x( ,)
y
y(
,)
需计算: x ,y ,x ,y
Step 1: 利用差分(或其他方法)计算出
网格间距变化要缓慢,否则会带 来较大误差
12
方法2) 在非等距网格上直接构造差分格式 (不易推广到高维)
原理: 直接进行Taylor展开,构造格式 格式系数是坐标(或网格间距)的函数
u x
j
a1u j2
a2u j1 a3u j
a4u j1 O(3 )
… j-2 j-1 j
高等流体力学PPT课件

2
aij ijkk
uD S r
表示由于流体微团变形而产生的 M 点相对于M点 的速度变化。
uR
1 ur
2
表示由于流体微团绕瞬时轴旋转而产生的 对于M 点的速度变化。
M 点相
26
26
欧拉和拉格朗日参考系中的时间导数
欧拉参考系:
u t x,y,z
u
u(x,
y,
z,
t)
某一空间点上的流体速度随时间的变化,称当地导 数或局部导数。
拉格朗日参考系:u u(x0, y0, z0,t)
u
t
x0 , y0 ,z0
流体质点速度随时间的变化,即加速度。
在欧拉参考系下用 Du 表示流体质点的速度变化。
25
速度分解定理,应变率张量和旋转率张量
速度分解定理
ui
ui x j
xj
1 2
ui x j
u j xi
1 2
ui x j
u j xi
xj
sij x j aij x j S r A r
Sr 1 ur
2
u uD uR
aij x j ijk x jk r
物质导数
以矢量和张量下标形式表示的物质导数
D
Dt
t
uk
xk
D
Dt
t
u
t
u
算符
u
ui vj wk
i
x
j
y
k
z
u v w x y z
13
13
物质导数物理意义
D Dt t uk xk
D 物质导数,质点导数,随体导数;
Dt
欧拉参考系中的时间导数,称局部导数或就地导数,表示空
高等流体力学课件 高等流体力学(3)
r(x, y, z) 改变, t 不变,表示同一时刻不同空间点上场变量的变化; t 改变, r (x, y, z) 不变,表示同一空间点上的场变量随时间的变化。
当采用欧拉参考系时,就定义了物理量的空间分布,称为该物理量场,例如速度场、压强
场等。因此欧拉观点是场的观点,可运用数学上“场论”知识作为理论分析工具。欧拉法
令
J
r x0
r y0
r z0
x y0
y y0
z x, y, z y0 x0 , y0 , z0
x y z
z0 z0 z0
J 0
质量守恒,
00 J 0
0
雅克比行列式 J 表示一流体微团或流体质点在 t 时刻和初始时刻 t0 的体
积之比,也表示初始时刻 t0和时刻 t 的密度比。
t)3
4z0e2tt (1 t)3
2z0e2t (1 t)3
6z0e2tt (1 t)4
2z0e2t[2t(1 t) (1 (1 t)4
t)
3t]
2z0e2t (2t2 1) (1 t)4
2z(2t2 1) (1 t)2
2020/11/14
26
2.2 迹线、流线和脉线
迹线 迹线是同一流体质点在空间运动过程中描绘出来的曲线,即轨迹。
积分求得
r r x0, y0, z0,t
或
x x x0, y0, z0,t, y y x0, y0, z0,t, z z x0, y0, z0,t
在以上方程组中 t 是自变量。 x, y, z 是流体质点的空间坐标,因此 都是 t 的函数。
求迹线是在拉格朗日参考系中进行的。
2020/11/14
对于非定常流动,空间给定点的速度大小和方向随时间而变 化,因此谈到流线总是指某一给定时刻的流线。
《流体力学第三章》PPT课件
本章是流体力学在工程上应用的基础。它主要利 用欧拉法的基本概念,引入了总流分析方法及 总流运动的三个基本方程式:连续性方程、能 量方程和动量方程,并且阐明了三个基本方程 在工程应用上的分析计算方法。
第一节 描述流体运动的两种方法
1.拉格朗日法 拉格朗日方法(lagrangian method)是以流场 中每一流体质点作为描述流体运动的方法,它 以流体个别质点随时间的运动为基础,通过综 合足够多的质点(即质点系)运动求得整个流 动。——质点系法
ux=x+t; uy= -y+t;uz=0,试求t =
dx xt dt
dy y t dt
求解
0 时过 M(-1,-1) 点的迹线。
解:
由迹线的微分方程:
dx dy dz dt ux uy uz
ux=x+t;uy=-y+t;uz=0 t = 0 时过
M(-1,-1):
x C1 e t t 1 y C2 e t t 1
运动的轨迹,是与 拉格朗日观点相对 应的概念。
r r(a, b, c, t )
即为迹线的参数方程。
t 是变数,a,b,c 是参
数。
18
(2)迹线的微分方程
式中,ux,uy,uz 均为时空t,x,y,z的函数, 且t是自变量。 注意:恒定流时流线和迹线重合; 非恒定流时流线和迹线不重合;
举例
已知直角坐标系中的速度场
(3)流线的方程
根据流线的定义,可以求得流线的微分方程, 设ds为流线上A处的一微元弧长:
u为流体质点在A点的流速:
因为
所以
——流线方程
【例】
有一流场,其流速分布规律为:ux= -ky, uy = kx, uz=0, 试求其流线方程。 解: uz =0,所以是二维流动,二维流动的流线方程微分为
高等流体力学第3讲
第三讲 流体静力学一、 静止流体中的应力特性静止流体中,流体质点之间没有相对运动,切应力必然为0,又由于流体分子之间的引力很小,流体质点之间几乎不能承受拉力。
因此,在静止流体中,只能存在指向作用面的法向应力。
即n p =-p n (3-1)式中的p n 就是工程流体力学中的流体静压力。
上式也可以写成张量形式P ==000000p p p -⎡⎤⎢⎥-⎢⎥⎢⎥-⎣⎦=p 00000011⎡⎤⎢⎥1⎢⎥⎢⎥⎣⎦= p I (3-2) 式中I 为单位张量。
静止流体中任意一点处的应力无论来自何方均相等,即任意一点处的静压力与作用方向无关。
二、 欧拉平衡方程惯性坐标系中,任何流体处于静止状态的必要条件是:作用在物体上的合外力为0,即0∑=F (4-3)在静止流场中任取一个流体团作为研究对象,作用在其上的质量力可表示为d ρττ⎰⎰⎰f (a ) 表面力可表示为d d AAp A p A -=-⎰⎰⎰⎰n n (b )根据第一个平衡条件(3-3)可得d d =0Aρτp A τ-⎰⎰⎰⎰⎰f n (c ) 根据高斯定理可知,若物理量p 在封闭空间τ中连续且存在连续的一阶导数,则有d =d Ap A p ττ∇⎰⎰⎰⎰⎰n (d )将(d)式代入(c)式则可得d 0ρp ττ-∇=⎰⎰⎰()f 由于流体团是任意选取的,所以要使上式成立,则被积函数在该体积内任意点上的数值必须为0,于是有=0ρp -∇f或1=p ρ∇f (3-4)这就是欧拉平衡微分方程式,其在直角坐标系中可写为111x yzp f ρx pf ρy p f ρz ⎧∂=⎪∂⎪⎪∂=⎨∂⎪⎪∂=⎪∂⎩(3-5) 同时,合力矩为0是自动满足的。
三、 静压流场的质量力条件(自学)对于所有的静止流体,(3-4)式均成立,现对其两端同时取旋度可得1111==+=p p p p ρρρρ⎛⎫⎛⎫⎛⎫∇⨯∇⨯∇∇⨯∇∇⨯∇∇⨯∇ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭()f上式中应用了标量函数梯度的旋度为0这一结论,现证明之p ∇⨯∇()=p p p xy z ⎛⎫∂∂∂∇⨯++ ⎪∂∂∂⎝⎭i j k=x y z p p p xy z∂∂∂∂∂∂∂∂∂∂∂∂ij k =p p p p p p y z z y x z z x x y y x ⎛⎫⎛⎫∂∂∂∂∂∂∂∂∂∂∂∂⎛⎫---+-⎪ ⎪ ⎪∂∂∂∂∂∂∂∂∂∂∂∂⎝⎭⎝⎭⎝⎭i j k =0(矢量) 将上式与(3-4)式进行点乘则有()1=p p ρρ⎡⎤⎛⎫∇∇⨯∇⨯∇⎢⎥ ⎪⎝⎭⎣⎦f f 上式右端为矢量的混合积,由混合积的定义可知由于三个矢量中有两个同名,所以其值为0,可得()=0∇⨯f f (3-6)由此可以得出结论:流体静止的必要条件是质量力必须满足()=0∇⨯ff 。
高等流体力学笔记第3讲

§2.4流体微团运动的分析流体微团:由大量流体质点组成的形状可任意选取,尺寸足够小的流体微元。
一、流体微团的线变形速率、角变形速率与旋转角速度 流体微团运动的速度分解:根据高等数学可知,若已知一点的流速,则其它相邻点的流速均可用其一阶泰勒级数展开表示。
为了简明起见,我们选择一个正方形流体微团的一个面进行分析,并通过分析引出几个中用的的积分概念与定义,并将其扩展到三维情况。
如图所示,二维流体微团abcd ,设a 点的流速为u,v ,则根据泰勒级数展开表达式,流体微团其它任何点上的速度均可表示为:x 方向:dy y u dx x u u ∂∂+∂∂+y 方向:dy yv dx x v v ∂∂+∂∂+(∵b 点:dy=0,c 点:dx=0,d 点:dx,dy ≠0)所以在a,b,c,d 各点上,流速分布分别为:a 点:x 方向u y 方向vb 点:x 方向dx x u u ∂∂+ y 方向dx xv v ∂∂+ c 点:x 方向dy y uu ∂∂+y 方向dy yv v ∂∂+d 点:x 方向dy yu dx x u u ∂∂+∂∂+y 方向dy yv dx x v v ∂∂+∂∂+经过dt 时间流体微团将会移动到新的位置,而且因为速度分量的不同,会发生平动、转动和变形的复合运动,一般将会成为一个对角线发生了偏转的菱形流体微团。
根据速度可分解的性质,上图所示速度分布可分解成下面三种情况:单纯的平行移动:如图所示,因为各点具有相同的速度分量,故dt 时间后,流速仅发生单纯的平行移动。
单纯的线变形:如图所示,因a 点速度为0,dt 时段后不变,而b ,d 点均有相同的x 方向分量dx x u ∂∂,故dt 时段后在x 方向拉伸(或压缩)dxdt xu∂∂,在c,d 点均有相同的y 方向速度分量dy yv ∂∂故dt 时段后在y 方向拉伸了dydt y v∂∂。
因流体微团的各个方向的没有变,故这是一种单纯的线变形运动。
流体力学讲义 第三章 流体动力学基础

第三章流体动力学基础本章是流体动力学的基础。
主要阐述了流体运动的两种描述方法,运动流体的基本类别与基本概念,用欧拉法解决运动流体的连续性微分方程、欧拉运动微分方程及N-S方程。
此外,还阐述了无旋流与有旋流的判别,引出了流函数与势函数的概念,并且说明利用流网与势流叠加原理可解决流体的诸多复杂问题。
第一节流体流动的基本概念1.流线(1)流线的定义流线(stream line)是表示某一瞬时流体各点流动趋势的曲线,曲线上任一点的切线方向与该点的流速方向重合。
图3-1为流线谱中显示的流线形状。
(2)流线的作法:在流场中任取一点(如图3-2),绘出某时刻通过该点的流体质点的流速矢量u1,再画出距1点很近的2点在同一时刻通过该处的流体质点的流速矢量u2…,如此继续下去,得一折线1234 …,若各点无限接近,其极限就是某时刻的流线。
流线是欧拉法分析流动的重要概念。
图3-1 图3-2(3)流线的性质(图3-3)a.同一时刻的不同流线,不能相交。
图3-3因为根据流线定义,在交点的液体质点的流速向量应同时与这两条流线相切,即一个质点不可能同时有两个速度向量。
b.流线不能是折线,而是一条光滑的曲线。
因为流体是连续介质,各运动要素是空间的连续函数。
c.流线簇的疏密反映了速度的大小(流线密集的地方流速大,稀疏的地方流速小)。
因为对不可压缩流体,元流的流速与其过水断面面积成反比。
(4)流线的方程(图3-4)根据流线的定义,可以求得流线的微分方程:图3-4设d s为流线上A处的一微元弧长:u为流体质点在A点的流速:因为流速向量与流线相切,即没有垂直于流线的流速分量,u和d s重合。
所以即展开后得到:——流线方程(3-1)(或用它们余弦相等推得)2.迹线(1)迹线的定义迹线(path line)某一质点在某一时段内的运动轨迹线。
图3-5中烟火的轨迹为迹线。
(2)迹线的微分方程(3-2)式中,u x,u y,u z均为时空t,x,y,z的函数,且t是自变量。
流体力学 3-3-4流体运动学讲解

uxdt
)
dx
四 空间运动的连续性方程
流入与流出微元六面体 的质量——x方向
(d ydzuxdt)
x
dx
(ux
x
)
dxd
y d z dt
y方向
(
u
y
y
)
d
x
d
y
d
z
dt
z方向
(
uz
z
)
d
x
d
y
d
z
dt
dt时间内六面体 的净流量为
[(ux) (uy )
x
y
(2)对于不稳定流,经过同一点的流线其空间方位和形状 是随时间改变的。
(3)由于稳定流动的速度分布与时间无关,所以流线的形 状和位置不随时间变化。同时流体质点只能沿着流线运动, 否则将会有一个与流线相垂直的速度分量。所以稳定流动 的迹线与流线重合。
2.流线的性质
(4)不稳定流动包含两方面的含义:大小或方向随时间变化。
3.流线方程
设流线上一点的速度矢量为u,流线上的微元线段矢量dr
由流线定义,矢量表示的微分方程为
u
dr
0
在直角坐标系中,依矢量运算法则可知u与dr成比例,即
ux
dx
x, y,
z,
t
uy
dy
x, y,
z,
t
uz
dz
x, y,
z,
t
式中的t代表的是同一瞬时,当作常数处理。
在不稳定流动中,流线微分方程积分的结果包括时间t,不
解:取控制面如图,设自由面上水位变化是均匀的,并设控制面A3上流 体的出流速度为v3,由不可压缩流体的连续方程可得
第三讲 流体运动学

任一物理量的质点导数
d (t t , x x, y y, z z ) (t , x, y, z ) lim dt t 0 t
3-2 物理量的质点导数
d (t t , x x, y y, z z ) (t , x, y, z ) lim dt t 0 t
与空间坐标无关,则称为均匀场(均匀流动)。
V V V p p p ... 0 x y z x y z
流动参数仅是时间t的函数,则用欧拉法可表示为:
V =V (t)
3-1 流体运动的描述
三、流场的两个特例
如图所示装置,将阀门A和B的开度调节到使水箱中的水 位保持不变。
二、欧拉法与控制体
速度场可表示为: 压强、密度和温度场表示为:
u u x, y , z , t v v x, y , z , t w w x, y , z , t
其中 x, y, z , t 为欧拉变数
p p ( x, y , z , t ) ( x, y , z , t ) T T ( x, y , z , t )
拉格朗日法
研究对象是一定质点 不能直接反映参数的空间分布 能直接反映质点的时变过程
表达式复杂 数学求解较困难 可直接应用牛二定律建立基本运动方程 (但对所考察物质体的可辨识性有要求)
欧拉法
研究对象是空间某固定点或断面
直接反映参数的空间分布 不能直接反映质点的时变过程
表达式相对 简单 数学求解相对简单 无法直接应用牛二定律建立 基本运动方程
当地(时变)加速度
dV V V V 矢量式为 a dt t
迁移(位变)加速度
3-2 物理量的质点导数
流体力学第三章讲义
Chapter 3 流体运动的基本方程组本章任务:建立控制流动的基本方程组,确定边界条件。
§3.1系统和控制体系统(sys )指给定流体质点组成的流体团,相当于质点或刚体力学中的研究对象——物体;系统在流动过程中可以不断改变自己的位置和形状,但维持其连续性,始终由固定的那些流体质点组成。
系统与外界可以有力的相互作用,可以有动量和能量交换,但是没有物质交换。
控制体(CV )指流动空间内的一个给定空间区域(子空间),其边界面称为控制面(CS )。
控制体一旦选定,其大小、形状和位置都是确定的,有流体不断出入。
物质体元即流体微团。
物质面元可以看成由连续分布的流体质点(看成是没有体积的几何点)构成的面元,物质面元在流动过程中可以变形,但始终由这些流体质点组成。
物质线元可以看成连续分布的流体质点(看成是没有体积的几何点)构成的线元,或者说是连续分布的流体质点的连线线元,物质线元在流动过程中可以变形,但始终由这些流体质点组成。
时间线就是物质线。
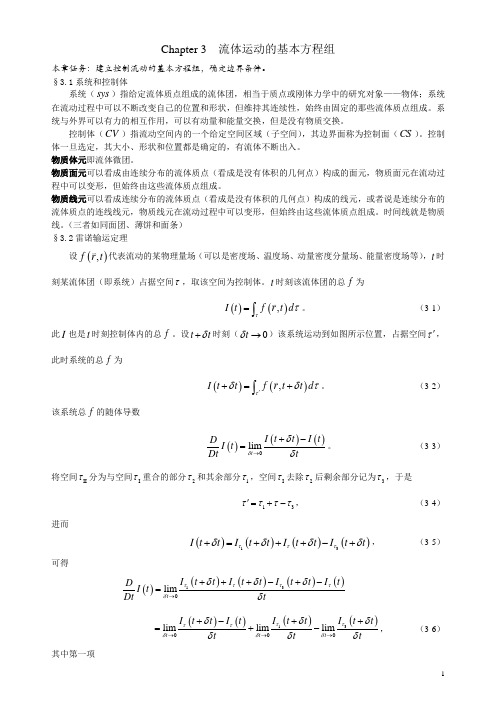
(三者如同面团、薄饼和面条) §3.2雷诺输运定理设(),f r t 代表流动的某物理量场(可以是密度场、温度场、动量密度分量场、能量密度场等),t 时刻某流体团(即系统)占据空间τ,取该空间为控制体。
t 时刻该流体团的总f 为()(),I t f r t d ττ=⎰。
(3-1)此I 也是t 时刻控制体内的总f 。
设t t δ+时刻(0t δ→)该系统运动到如图所示位置,占据空间τ',此时系统的总f 为()(),I t t f r t t d τδδτ'+=+⎰。
(3-2)该系统总f 的随体导数()()()0lim t I t t I t DI t Dt tδδδ→+-=。
(3-3)将空间II τ分为与空间I τ重合的部分2τ和其余部分1τ,空间I τ去除2τ后剩余部分记为3τ,于是13ττττ'=+-,(3-4)进而()()()()13I t t I t t I t t I t t τττδδδδ+=+++-+,(3-5)可得()()()()()130lim t I t t I t t I t t I t DI t Dt tττττδδδδδ→+++-+-=()()()()31000lim lim lim t t t I t t I t t I t t I t t t tττττδδδδδδδδδ→→→+++-=+-, (3-6)其中第一项()()()0limt I t t I t I t t t ττδδδ→+-∂=∂。
计算流体力学 CFD13-第3讲-差分方法1
u
n j
a
u
n j
u
n j 1
0
t
x
等价于
修正方程
x
x 2
t t 2
ut aux 2 uxx 6 uxxx 2 utt 6 uttt ...... 0
u a u 0 t x
ut aux utt a2uxx uttt a3uxxx
x
u x
j
1 2!
((2)2
a1
(1)2
a2
)x
2
2u x2
j
1 3!
((2)3
a1
(1)3
a2
)x3
3u x3
j
O(x4 )
a1 a2 a3 0
2a1
(1)a2
1 x
(2)2 a1 (1)2 a2 0
a1
1 2x
, a2
4 2x
, a3
3 2x
u x
j
1 2x
(u j2
复杂外形的工程 计算
多用于固体力学 等
简单外形的高精 度计算
复杂外形的工程 计算
Copyright by Li Xinliang
2
3.1 差分格式基本原理
1. 差分法基本概念
基本功能: 计算导数
… j-2 j-1 j j+1 …
uj
已知(一维均匀网格上的)函数分布,计算其导数值
u a u 0 t x
4u j1
3u j )
7 6
3u x3
j
x2
O(x3)差分格式基本概念:
a. 差分表达式(差分格式)、截断误差、精度
精度与分辨率的关系
u x
高等流体力学Lectures_Part 3

Index Notation (aka Tensor Notation) Free Indices A free index is an index that appears exactly once in a term. Each term in an equation must have the same free indices. Examples: aijk bj= cik aijbjk = clm
same piece of fluid piece of fluid time: t0 location: x(t0) time: t0+δt location: x(t0+δt)
Continuity Equation (aka COM for a differential CV )
Notes: 1. For a constant density fluid:
σ 22 +
x1
dx1
Momentum Equations (aka the LME for a differential CV)
Fluid Element Deformations
=
+
+
+
general deformation
translation
dilation
angular deformation
ˆ n
surface area, dA viscous force, dFviscous
Fv2 Fv1 streamlines
Example:
In a proposed jet propulsion system for an automobile, air is drawn in vertically through a large intake in the roof at a rate of 3 kg/s, the velocity through this intake being small. Ambient pressure and temperature are 100 kPa (abs) and 30 °C. This air is compressed and heated and then discharged horizontally out of a nozzle at the rear of the automobile at a velocity of 500 m/s and a pressure of 140 kPa (abs). If the rate of heat addition to the air stream is 600 kW, find the nozzle discharge area and the thrust developed by the system.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第三讲 流体静力学一、 静止流体中的应力特性静止流体中,流体质点之间没有相对运动,切应力必然为0,又由于流体分子之间的引力很小,流体质点之间几乎不能承受拉力。
因此,在静止流体中,只能存在指向作用面的法向应力。
即n p =-p n (3-1)式中的p n 就是工程流体力学中的流体静压力。
上式也可以写成张量形式P ==000000p p p -⎡⎤⎢⎥-⎢⎥⎢⎥-⎣⎦=-p 00000011⎡⎤⎢⎥1⎢⎥⎢⎥⎣⎦= -p I (3-2) 式中I 为单位张量。
静止流体中任意一点处的应力无论来自何方均相等,即任意一点处的静压力与作用方向无关。
二、 欧拉平衡方程惯性坐标系中,任何流体处于静止状态的必要条件是:作用在物体上的合外力为0,即0∑=F (4-3)在静止流场中任取一个流体团作为研究对象,作用在其上的质量力可表示为d ρττ⎰⎰⎰f (a ) 表面力可表示为d d AAp A p A -=-⎰⎰⎰⎰n n (b )根据第一个平衡条件(3-3)可得d d =0Aρτp A τ-⎰⎰⎰⎰⎰f n (c ) 根据高斯定理可知,若物理量p 在封闭空间τ中连续且存在连续的一阶导数,则有d =d Ap A p ττ∇⎰⎰⎰⎰⎰n (d )将(d )式代入(c )式则可得d 0ρp ττ-∇=⎰⎰⎰()f 由于流体团是任意选取的,所以要使上式成立,则被积函数在该体积内任意点上的数值必须为0,于是有=0ρp -∇f或1=p ρ∇f (3-4)这就是欧拉平衡微分方程式,其在直角坐标系中可写为111x y z p f ρx pf ρy p f ρz ⎧∂=⎪∂⎪⎪∂=⎨∂⎪⎪∂=⎪∂⎩(3-5) 同时,合力矩为0是自动满足的。
三、 静压流场的质量力条件(自学)对于所有的静止流体,(3-4)式均成立,现对其两端同时取旋度可得1111==+=p p p p ρρρρ⎛⎫⎛⎫⎛⎫∇⨯∇⨯∇∇⨯∇∇⨯∇∇⨯∇ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭()f上式中应用了标量函数梯度的旋度为0这一结论,现证明之p ∇⨯∇()=p p p xy z ⎛⎫∂∂∂∇⨯++ ⎪∂∂∂⎝⎭i j k=x y z p p p xy z∂∂∂∂∂∂∂∂∂∂∂∂ij k =p p p p p p y z z y x z z x x y y x ⎛⎫⎛⎫∂∂∂∂∂∂∂∂∂∂∂∂⎛⎫---+-⎪ ⎪ ⎪∂∂∂∂∂∂∂∂∂∂∂∂⎝⎭⎝⎭⎝⎭i j k =0(矢量)将上式与(3-4)式进行点乘则有()1=p p ρρ⎡⎤⎛⎫∇∇⨯∇⨯∇⎢⎥ ⎪⎝⎭⎣⎦f f 上式右端为矢量的混合积,由混合积的定义可知由于三个矢量中有两个同名,所以其值为0,可得()=0∇⨯f f (3-6)由此可以得出结论:流体静止的必要条件是质量力必须满足()=0∇⨯ff 。
(此式自然成立啊,为什么还要证明呢?)对于不可压缩流体,由于密度为常数,则平衡方程(3-4)式可写成=p ρ⎛⎫∇ ⎪⎝⎭f (3-7) 对上式两端取旋度则有=p ρ⎛⎫∇⨯∇⨯∇ ⎪⎝⎭f =0 (3-8)这是不可压缩流体静止时对质量力所附加的限制条件,即质量力必须无旋。
(矢量场的四等价定理:无旋必有势;有势必无旋;环量为零;线积分与路径无关。
) 四、 等压面等压面是指由静压力相等的点组成的面,等压面的性质包括以下几点: 1. 等压面与质量力相垂直; 2. 等压面是质量力的等势面;【证明】设质量力f =X i +Y j +Z k 所代表的质量力场中,若存在标量函数U 满足U Xdx Ydy Zdz =-++⎰或()d d d d U X x Y y Z z =-++则称之为质量的势函数,其中的负号表示质量力做正功时质量力的是函数减小。
在静止流场中任取一个微元矢量力d r =d x i +d y j +d z k ,()d d =d U U U U dx dy dz U Xdx Ydy Zdz xy z ⎛⎫∂∂∂∇=++==-++- ⎪∂∂∂⎝⎭r f r由于d r 是任意的微元矢量,所以有U =-∇f将其代入(3-4)式可得1p U ρ∇=-∇ 上式表明等压面方程p ∇=0与等势面U ∇=0等价。
【证毕】3. 等压面是不相容流体间的分界面;4. 等压面是等密度面。
五、 静力学基本公式——静压力分布规律21p p ρgh =±它表明:○1重力作用下的均质流体内部的静压力,与深度h 呈线性关系,因此,水坝都设计成上窄下宽的形状;○2静止流体内部任意点的静压力由液面上的静压力p 0与液柱所形成的静压力ρgh 两部分组成,深度h 相同的点静压力相等;○3静止流体边界上压力的变化将均匀地传递到流体中的每一点,这就是著名的帕斯卡定律。
六、 压力标准1. 流体静压力的计量标准流体力学中,静压力的计量有两个标准,一个是以物理真空为零点的标准,称为绝对标准,按照绝对标准计量的压力称为绝对压力;另一个是以当地大气压力为零点的标准,称为相对标准,按照相对标准计量的压力称为相对压力。
2. 流体静压力的表示方法 绝对压力用abp 表示,对敞口容器中液面以下深度为h 的点来讲,其绝对压力可表示为=ab a p p +ρgh (3-9) 绝对压力不能小于零。
工程中绝对压力的数值可以大于当地大气压力,也可以小于当地大气压力。
因此,相对压力便有了正负之分。
当绝对压力大于当地大气压力时,相对压力大于零,称为表压,用pM 来表示,即==M ab a p p p ρgh -。
(3-10)之所以称之为表压是因为压力表所显示的压力就是这个压力。
当绝对压力小于当地大气压力时,相对压力小于零,称为真空压力或真空度,用pv 来表示,即=v a abp p p - (3-11)真空压力采用真空表测量。
绝对压力、表压和真空度之间的关系可用图3-1来表述。
从中可以看出,表压的含义是比当地大气压力大多少,真空度的含义是比当地大气压力小多少。
表压越大压力越大,真空度越大压力越小,反之亦然。
工程流体力学中所说的压力如不特殊说明指的就是表压,为了简便通常将其下标M 省略,仅以p 表示。
至此,可以归纳出以下的关系=ab a p p +p(3-12)=ab a vp p p - (3-13)==ab a vp p p p -- (3-14)真空度与表压的符号相反,真空度不能直接参与计算,计算工程中必须将真空度转换为负的表压代入方程中,这一点在以后的计算中要予以注意。
七、 静力学基本方程式+=p z c ρg(3-15a )1212=p p z z ρgρg++(3-15b )物理意义:z 称为比位能,p /ρg 称为比压能,而z +p /ρg 称为总比能。
因此,静力学基本方程的物理意义是:静止流体中总比能为常数。
几何意义:z 称为位置水头,p /ρg 称为压力水头,而z +p /ρg 称为测压管水头。
因此,静力学基本方程的几何意义是:静止流体中测压管水头为常数。
八、 作用在平面上的总压力sin C C C P =ρgy αA =ρgh A =p A (3-16) 式中pC 代表形心C 处的压力。
它表明:作用在任意形状平面上的总压力大小等于该平面的面积与其形心C 处的压力的乘积。
总压力的作用点称为压力中心。
压力中心的yD 坐标的计算公式为图3-1 绝对压力与相对压力pC D C C J y =y +y A(3-17)因为J C /y C A 恒为正值,所以y D >y C ,说明压力中心D 永远低于平面形心C 。
但是,这一结论对水平放置的平面不适用,此时的压力中心与形心重合。
在应用上述计算公式时应该注意以下两点:(1)没有考虑大气压的影响。
这主要是因为工程实际中容器外也会受到大气压的作用,两者形成的总压力相互抵消,所以在计算总压力时不考虑大气压力的影响,而仅仅考虑液体形成的总压力。
(2)在压力中心的计算公式中y 坐标原点的取法。
式(3-17)只是适用于液面压力为大气压时的情形。
即y 的坐标的原点位于自由液面与平面延长线的交点处。
但是,当自由液面上的压力不是大气压时,式(3-17)中y坐标的原点只能在等效自由液面与平面延长线的交点处。
那么什么是等效自由液面呢?现在考察图3-2所示的两种情形,左图为液面压力大于大气压的情形,其液面绝对压力为p 0’=p a +ρgh ,右图为将原有液面升高了h =(p 0’-p a )/ρg 后,且液面绝对压力等于大气压时的情形,两者对平面AB 形成了完全相同的压力分布,同时两者作用在平面上的总压力是完全相同的。
因此,称右图中的自由液面为左图中液面的等效自由液面。
在计算过程中绝对不可以将左图中的O ’点作为y 坐标的原点,而应取右图中的O 点作为y 坐标的原点。
也就是说,在进行压力中心位置计算时,应该将液面压力不是大气压的液面转换成等效自由液面,然后重新找出y 的原点进行计算。
对液面绝对压力低于大气压的情形应该用类似的方法来处理,具体如何处理请读者自己思考。
九、 作用在曲面上的总压力1. 总压力的水平分量x C x P =ρgh A y C y P =ρgh A图3-2 等效自由液面z C z P =ρgh A2. 总压力的铅直分量z P =ρgV3. 压力体压力体可以表述为:压力体是由受力曲面、液体的自由表面(或其延长面)以及两者间的铅垂面所围成的封闭体积。
压力体是从积分式A z hdA ⎰得到的一个体积,它是一个纯数学的概念,与这一体积内是否充满液体无关,图3-3是两个典型的压力体。
比较图中(a )和(b )的压力体,不难发现两者有着明显的不同,○1压力体所形成的总压力方向不同,图3-3a 中压力体形成的总压力方向向下,图3-3b 中的压力体所形成的总压力方向向上;○2是两者压力体与液体所处的位置不同,图3-3a 中的压力体与液体位于曲面的同一侧,图3-3b中的压力体与液体则不在曲面的同一侧。
由此可以引入定义:如果压力体与形成压力的液体在曲面的同侧,则称这样的压力体为实压力体,用(+)来表示;如果压力体与形成压力的液体在曲面的异侧,则称这样的压力体为虚压力体,用(-)来表示。
图3-3a 中的压力体是实压力体,它对曲面形成向下的压力。
图3-3b 中的压力体是虚压力体,它对曲面形成向上的浮力。
需要注意的是:以上的两个压力体给人的感觉是实压力体就是内部充满液体的压力体,虚压力体就是内部没有液体的压力体。
其实压力体的虚实与其内部是否充满液体无关,图3-4中FG 的压力体是实压力体,但压力体的上半部分却没有充满液体。
∇AB CD EF GHIJ 图3-4 压力体的合成(+)(-)(+)(-)图3-3 压力体的虚实(a)(b)再一个问题就是压力的合成,图3-4中CDE 曲面的压力体的画法对初学者来讲有一定的难度,首先我们把曲面划分为CD 和DE 两部分,先画出CD 部分的压力体,即图中的画右斜线部分,这部分压力体为虚压力体;后画出DE 部分的压力体,即图中的左斜线部分,这部分压力体为实压力体;最后将两者合成,交叉部分的压力体虚实相抵后剩下的凸出部分便是CDE 曲面的压力体,其压力体为实压力体,压力体对曲面的作用力是向下压力。